Transformations. Prof. Dr. Markus Gross
|
|
|
- Luke Osborne
- 7 years ago
- Views:
Transcription
1 Transformations Prof. Dr. Markus Gross

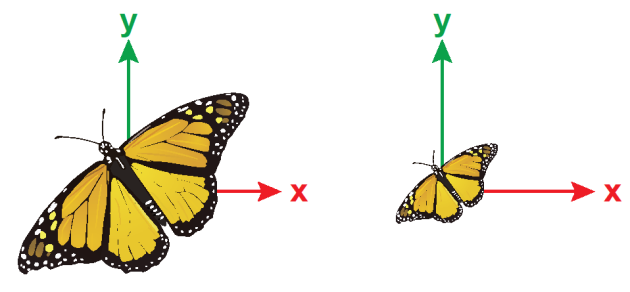
2 Transformations Transformations map geometry
3 Transformations Transformations in the graphics pipeline: Change position & orientation of objects Project objects to screen Animate objects
4 Notation Points and vectors are represented as Matrices are represented as A point is transformed as Transpose:
5 Linear maps Definitions Represented by matrices Affine maps
6 Translation 2D Transformations Scaling
7 2D Transformations Rotation by angle In matrix form
8 Homogeneous Coordinates Affine maps are linear maps in homogeneous coordinates
9 Homogeneous Coordinates Translation is represented as a matrix

10 Homogeneous Coordinates Rotation Scaling
11 Homogeneous Coordinates Shear along x- and y- axis
12 Homogeneous Coordinates A point has infinitely many homogeneous coordinates, for any

13 Homogeneous Coordinates Point as a line in 3D homogenous coordinates affine plane
14 Combining Transformations Combine via matrix multiplication Example: rotation followed by translation
15 Combining Transformations Commutativity Matrix Translation Rotation Scaling Scaling Matrix Translation Rotation Scaling Rotation Only for 2D!
16 3D Transformations Homogeneous coordinates: 4x4 matrices Project onto the hyperplane
17 3D Transformations Translation Scaling
18 3D Transformations Rotation around the x-, y-, z- axis
19 3D Transformations Rotation of angle around an axis
20 3D Transformations Shearing parallel to the principal planes
21 Coordinate Systems Represent a point/vector as a linear combination of orthonormal basis vectors
22 Coordinate Systems Change of coordinate systems t

23 Coordinate Systems Change of coordinate systems t

24 Coordinate Systems Change of coordinate systems t Rotation Translation

25 Coordinate Systems Change of coordinate systems t
26 Transforming Normal Vectors Surface normal

27 Transforming Normal Vectors Surface normal tangent plane
28 Transforming Normal Vectors How to transform a normal when Each on the plane satisfies Then the normal is given by
")
29 Transforming Normal Vectors How to transform a normal when Current normal Transformed normal Verify by some algebra! (Hint: the plane is given by )
30 Projection From 3D to 2D space Camera image plane
31 Projection From 3D to 2D space
32 Perspective Projection
33 Parallel vs. Perspective Projection Parallel Projection Perspective Projection

34 Parallel vs. Perspective Projection
35 Perspective Projection Vanishing points

36 Perspective Projection Mathematics of perspective projection
37 Perspective Projection Mathematics of perspective projection
38 Perspective Projection Mathematics of perspective projection 3D Coordinate
39 Parallel Projection Mathematics of parallel projection
40 Parallel projection Clipping Planes
41 Clipping Planes Parallel projection Perspective projection
42 Summary of Transformations Projective Rigid Affine Linear Translation Rotation Scaling Shear Perspective Parallel
43 Transformations in OpenGL Stages of transformations Vertex (x, y, z, 1) T Eye Coordinates Clip Coordinates Normalized Device Coordinates Window (Screen) Coordinates ModelView Transform Projection Perspective Division Viewport Transform
44 Transformations in OpenGL Stages of transformations Vertex (x, y, z, 1) T Eye Coordinates Clip Coordinates Normalized Device Coordinates Window (Screen) Coordinates ModelView Transform Projection Perspective Division Viewport Transform
45 Transformations in OpenGL ModelView Transform Stage 1: Model to world coordinates r 3 r 2 t Model Coordinates World Coordinates r 1
46 Transformations in OpenGL ModelView Transform Stage 2: World to camera coordinates Default in OpenGL: Eye (Camera) Coordinates World Coordinates
47 Transformations in OpenGL Stages of transformations Vertex (x, y, z, 1) T Eye Coordinates Clip Coordinates Normalized Device Coordinates Window (Screen) Coordinates ModelView Transform Projection Perspective Division Viewport Transform
48 Transformations in OpenGL Projection Option 1: Parallel projection right glortho(left, right, bottom, top, near, far);
49 Transformations in OpenGL Projection Option 1: Parallel projection
50 Transformations in OpenGL Projection Option 2: Perspective projection right glfrustum(left, right, bottom, top, near, far);

51 Transformations in OpenGL Projection Option 2: Perspective projection


52 Transformations in OpenGL Projection Clip the points by comparing, and with
53 Transformations in OpenGL Stages of transformations Vertex (x, y, z, 1) T Eye Coordinates Clip Coordinates Normalized Device Coordinates Window (Screen) Coordinates ModelView Transform Projection Perspective Division Viewport Transform

54 Transformations in OpenGL Perspective division Normalized Device Coordinates Determines coordinates on the screen Used for depth tests
55 Transformations in OpenGL Stages of transformations Vertex (x, y, z, 1) T Eye Coordinates Clip Coordinates Normalized Device Coordinates Window (Screen) Coordinates ModelView Transform Projection Perspective Division Viewport Transform
56 Transformations in OpenGL Viewport Transform Normalized Device Coordinates Screen Coordinates glviewport(o x, o y, w, h); gldepthrange(n, f);
Realtime 3D Computer Graphics Virtual Reality
 Realtime 3D Computer Graphics Virtual Realit Viewing and projection Classical and General Viewing Transformation Pipeline CPU Pol. DL Pixel Per Vertex Texture Raster Frag FB object ee clip normalized device
Realtime 3D Computer Graphics Virtual Realit Viewing and projection Classical and General Viewing Transformation Pipeline CPU Pol. DL Pixel Per Vertex Texture Raster Frag FB object ee clip normalized device
3D Tranformations. CS 4620 Lecture 6. Cornell CS4620 Fall 2013 Lecture 6. 2013 Steve Marschner (with previous instructors James/Bala)
") 3D Tranformations CS 4620 Lecture 6 1 Translation 2 Translation 2 Translation 2 Translation 2 Scaling 3 Scaling 3 Scaling 3 Scaling 3 Rotation about z axis 4 Rotation about z axis 4 Rotation about x axis
3D Tranformations CS 4620 Lecture 6 1 Translation 2 Translation 2 Translation 2 Translation 2 Scaling 3 Scaling 3 Scaling 3 Scaling 3 Rotation about z axis 4 Rotation about z axis 4 Rotation about x axis
4BA6 - Topic 4 Dr. Steven Collins. Chap. 5 3D Viewing and Projections
 4BA6 - Topic 4 Dr. Steven Collins Chap. 5 3D Viewing and Projections References Computer graphics: principles & practice, Fole, vandam, Feiner, Hughes, S-LEN 5.644 M23*;-6 (has a good appendix on linear
4BA6 - Topic 4 Dr. Steven Collins Chap. 5 3D Viewing and Projections References Computer graphics: principles & practice, Fole, vandam, Feiner, Hughes, S-LEN 5.644 M23*;-6 (has a good appendix on linear
Geometric Camera Parameters
 Geometric Camera Parameters What assumptions have we made so far? -All equations we have derived for far are written in the camera reference frames. -These equations are valid only when: () all distances
Geometric Camera Parameters What assumptions have we made so far? -All equations we have derived for far are written in the camera reference frames. -These equations are valid only when: () all distances
2D Geometric Transformations
 2D Geometric Transformations (Chapter 5 in FVD) 2D Geometric Transformations Question: How do we represent a geometric object in the plane? Answer: For now, assume that objects consist of points and lines.
2D Geometric Transformations (Chapter 5 in FVD) 2D Geometric Transformations Question: How do we represent a geometric object in the plane? Answer: For now, assume that objects consist of points and lines.
3D Viewing. Chapter 7. Projections. 3D clipping. OpenGL viewing functions and clipping planes
 3D Viewing Chapter 7 Projections 3D clipping OpenGL viewing functions and clipping planes 1 Projections Parallel Perspective Coordinates are transformed along parallel lines Relative sizes are preserved
3D Viewing Chapter 7 Projections 3D clipping OpenGL viewing functions and clipping planes 1 Projections Parallel Perspective Coordinates are transformed along parallel lines Relative sizes are preserved
Essential Mathematics for Computer Graphics fast
 John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
Image Processing and Computer Graphics. Rendering Pipeline. Matthias Teschner. Computer Science Department University of Freiburg
 Image Processing and Computer Graphics Rendering Pipeline Matthias Teschner Computer Science Department University of Freiburg Outline introduction rendering pipeline vertex processing primitive processing
Image Processing and Computer Graphics Rendering Pipeline Matthias Teschner Computer Science Department University of Freiburg Outline introduction rendering pipeline vertex processing primitive processing
Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Sample Exam Questions 2007
 Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Questions 2007 INSTRUCTIONS: Answer all questions. Spend approximately 1 minute per mark. Question 1 30 Marks Total
Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Questions 2007 INSTRUCTIONS: Answer all questions. Spend approximately 1 minute per mark. Question 1 30 Marks Total
Introduction to Computer Graphics
 Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 torsten@sfu.ca www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 torsten@sfu.ca www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Given a point cloud, polygon, or sampled parametric curve, we can use transformations for several purposes:
 3 3.1 2D Given a point cloud, polygon, or sampled parametric curve, we can use transformations for several purposes: 1. Change coordinate frames (world, window, viewport, device, etc). 2. Compose objects
3 3.1 2D Given a point cloud, polygon, or sampled parametric curve, we can use transformations for several purposes: 1. Change coordinate frames (world, window, viewport, device, etc). 2. Compose objects
521493S Computer Graphics. Exercise 2 & course schedule change
 521493S Computer Graphics Exercise 2 & course schedule change Course Schedule Change Lecture from Wednesday 31th of March is moved to Tuesday 30th of March at 16-18 in TS128 Question 2.1 Given two nonparallel,
521493S Computer Graphics Exercise 2 & course schedule change Course Schedule Change Lecture from Wednesday 31th of March is moved to Tuesday 30th of March at 16-18 in TS128 Question 2.1 Given two nonparallel,
INTRODUCTION TO RENDERING TECHNIQUES
 INTRODUCTION TO RENDERING TECHNIQUES 22 Mar. 212 Yanir Kleiman What is 3D Graphics? Why 3D? Draw one frame at a time Model only once X 24 frames per second Color / texture only once 15, frames for a feature
INTRODUCTION TO RENDERING TECHNIQUES 22 Mar. 212 Yanir Kleiman What is 3D Graphics? Why 3D? Draw one frame at a time Model only once X 24 frames per second Color / texture only once 15, frames for a feature
2D Geometrical Transformations. Foley & Van Dam, Chapter 5
 2D Geometrical Transformations Fole & Van Dam, Chapter 5 2D Geometrical Transformations Translation Scaling Rotation Shear Matri notation Compositions Homogeneous coordinates 2D Geometrical Transformations
2D Geometrical Transformations Fole & Van Dam, Chapter 5 2D Geometrical Transformations Translation Scaling Rotation Shear Matri notation Compositions Homogeneous coordinates 2D Geometrical Transformations
CS 4204 Computer Graphics
 CS 4204 Computer Graphics 3D views and projection Adapted from notes by Yong Cao 1 Overview of 3D rendering Modeling: *Define object in local coordinates *Place object in world coordinates (modeling transformation)
CS 4204 Computer Graphics 3D views and projection Adapted from notes by Yong Cao 1 Overview of 3D rendering Modeling: *Define object in local coordinates *Place object in world coordinates (modeling transformation)
Lecture 2: Homogeneous Coordinates, Lines and Conics
 Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
Vector Math Computer Graphics Scott D. Anderson
 Vector Math Computer Graphics Scott D. Anderson 1 Dot Product The notation v w means the dot product or scalar product or inner product of two vectors, v and w. In abstract mathematics, we can talk about
Vector Math Computer Graphics Scott D. Anderson 1 Dot Product The notation v w means the dot product or scalar product or inner product of two vectors, v and w. In abstract mathematics, we can talk about
CS 4204 Computer Graphics
 CS 4204 Computer Graphics 2D and 3D Transformations Doug Bowman Adapted from notes by Yong Cao Virginia Tech 1 Transformations What are they? changing something to something else via rules mathematics:
CS 4204 Computer Graphics 2D and 3D Transformations Doug Bowman Adapted from notes by Yong Cao Virginia Tech 1 Transformations What are they? changing something to something else via rules mathematics:
Solving Simultaneous Equations and Matrices
 Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Lecture 3: Coordinate Systems and Transformations
 Lecture 3: Coordinate Systems and Transformations Topics: 1. Coordinate systems and frames 2. Change of frames 3. Affine transformations 4. Rotation, translation, scaling, and shear 5. Rotation about an
Lecture 3: Coordinate Systems and Transformations Topics: 1. Coordinate systems and frames 2. Change of frames 3. Affine transformations 4. Rotation, translation, scaling, and shear 5. Rotation about an
Geometry for Computer Graphics
 Computer Graphics and Visualisation Geometry for Computer Graphics Student Notes Developed by F Lin K Wyrwas J Irwin C Lilley W T Hewitt T L J Howard Computer Graphics Unit Manchester Computing Centre
Computer Graphics and Visualisation Geometry for Computer Graphics Student Notes Developed by F Lin K Wyrwas J Irwin C Lilley W T Hewitt T L J Howard Computer Graphics Unit Manchester Computing Centre
CPIT-285 Computer Graphics
 Department of Information Technology B.S.Information Technology ABET Course Binder CPIT-85 Computer Graphics Prepared by Prof. Alhasanain Muhammad Albarhamtoushi Page of Sunday December 4 0 : PM Cover
Department of Information Technology B.S.Information Technology ABET Course Binder CPIT-85 Computer Graphics Prepared by Prof. Alhasanain Muhammad Albarhamtoushi Page of Sunday December 4 0 : PM Cover
Transformations in the pipeline
 Transformations in the pipeline gltranslatef() Modeling transformation ModelView Matrix OCS WCS glulookat() VCS CCS Viewing transformation Projection transformation DCS Viewport transformation (e.g. pixels)
Transformations in the pipeline gltranslatef() Modeling transformation ModelView Matrix OCS WCS glulookat() VCS CCS Viewing transformation Projection transformation DCS Viewport transformation (e.g. pixels)
Geometry: Unit 1 Vocabulary TERM DEFINITION GEOMETRIC FIGURE. Cannot be defined by using other figures.
 Geometry: Unit 1 Vocabulary 1.1 Undefined terms Cannot be defined by using other figures. Point A specific location. It has no dimension and is represented by a dot. Line Plane A connected straight path.
Geometry: Unit 1 Vocabulary 1.1 Undefined terms Cannot be defined by using other figures. Point A specific location. It has no dimension and is represented by a dot. Line Plane A connected straight path.
COMP-557: Fundamentals of Computer Graphics McGill University, Fall 2010
 COMP-557: Fundamentals of Computer Graphics McGill University, Fall 2010 Class times 2:25 PM - 3:55 PM Mondays and Wednesdays Lecture room Trottier Building 2120 Instructor Paul Kry, kry@cs.mcgill.ca Course
COMP-557: Fundamentals of Computer Graphics McGill University, Fall 2010 Class times 2:25 PM - 3:55 PM Mondays and Wednesdays Lecture room Trottier Building 2120 Instructor Paul Kry, kry@cs.mcgill.ca Course
Affine Transformations
 A P P E N D I X C Affine Transformations CONTENTS C The need for geometric transformations 335 C2 Affine transformations 336 C3 Matri representation of the linear transformations 338 C4 Homogeneous coordinates
A P P E N D I X C Affine Transformations CONTENTS C The need for geometric transformations 335 C2 Affine transformations 336 C3 Matri representation of the linear transformations 338 C4 Homogeneous coordinates
Orthogonal Projections
 Orthogonal Projections and Reflections (with exercises) by D. Klain Version.. Corrections and comments are welcome! Orthogonal Projections Let X,..., X k be a family of linearly independent (column) vectors
Orthogonal Projections and Reflections (with exercises) by D. Klain Version.. Corrections and comments are welcome! Orthogonal Projections Let X,..., X k be a family of linearly independent (column) vectors
Vector Notation: AB represents the vector from point A to point B on a graph. The vector can be computed by B A.
 1 Linear Transformations Prepared by: Robin Michelle King A transformation of an object is a change in position or dimension (or both) of the object. The resulting object after the transformation is called
1 Linear Transformations Prepared by: Robin Michelle King A transformation of an object is a change in position or dimension (or both) of the object. The resulting object after the transformation is called
Geometric Transformation CS 211A
 Geometric Transformation CS 211A What is transformation? Moving points (x,y) moves to (x+t, y+t) Can be in any dimension 2D Image warps 3D 3D Graphics and Vision Can also be considered as a movement to
Geometric Transformation CS 211A What is transformation? Moving points (x,y) moves to (x+t, y+t) Can be in any dimension 2D Image warps 3D 3D Graphics and Vision Can also be considered as a movement to
Prentice Hall Mathematics: Algebra 2 2007 Correlated to: Utah Core Curriculum for Math, Intermediate Algebra (Secondary)
") Core Standards of the Course Standard 1 Students will acquire number sense and perform operations with real and complex numbers. Objective 1.1 Compute fluently and make reasonable estimates. 1. Simplify
Core Standards of the Course Standard 1 Students will acquire number sense and perform operations with real and complex numbers. Objective 1.1 Compute fluently and make reasonable estimates. 1. Simplify
Content. Chapter 4 Functions 61 4.1 Basic concepts on real functions 62. Credits 11
 Content Credits 11 Chapter 1 Arithmetic Refresher 13 1.1 Algebra 14 Real Numbers 14 Real Polynomials 19 1.2 Equations in one variable 21 Linear Equations 21 Quadratic Equations 22 1.3 Exercises 28 Chapter
Content Credits 11 Chapter 1 Arithmetic Refresher 13 1.1 Algebra 14 Real Numbers 14 Real Polynomials 19 1.2 Equations in one variable 21 Linear Equations 21 Quadratic Equations 22 1.3 Exercises 28 Chapter
GeoGebra. 10 lessons. Gerrit Stols
 GeoGebra in 10 lessons Gerrit Stols Acknowledgements GeoGebra is dynamic mathematics open source (free) software for learning and teaching mathematics in schools. It was developed by Markus Hohenwarter
GeoGebra in 10 lessons Gerrit Stols Acknowledgements GeoGebra is dynamic mathematics open source (free) software for learning and teaching mathematics in schools. It was developed by Markus Hohenwarter
3 Orthogonal Vectors and Matrices
 3 Orthogonal Vectors and Matrices The linear algebra portion of this course focuses on three matrix factorizations: QR factorization, singular valued decomposition (SVD), and LU factorization The first
3 Orthogonal Vectors and Matrices The linear algebra portion of this course focuses on three matrix factorizations: QR factorization, singular valued decomposition (SVD), and LU factorization The first
Pro/ENGINEER Wildfire 4.0 Basic Design
 Introduction Datum features are non-solid features used during the construction of other features. The most common datum features include planes, axes, coordinate systems, and curves. Datum features do
Introduction Datum features are non-solid features used during the construction of other features. The most common datum features include planes, axes, coordinate systems, and curves. Datum features do
Precalculus REVERSE CORRELATION. Content Expectations for. Precalculus. Michigan CONTENT EXPECTATIONS FOR PRECALCULUS CHAPTER/LESSON TITLES
 Content Expectations for Precalculus Michigan Precalculus 2011 REVERSE CORRELATION CHAPTER/LESSON TITLES Chapter 0 Preparing for Precalculus 0-1 Sets There are no state-mandated Precalculus 0-2 Operations
Content Expectations for Precalculus Michigan Precalculus 2011 REVERSE CORRELATION CHAPTER/LESSON TITLES Chapter 0 Preparing for Precalculus 0-1 Sets There are no state-mandated Precalculus 0-2 Operations
Part I. Basic Maths for Game Design
 Part I Basic Maths for Game Design 1 Chapter 1 Basic Vector Algebra 1.1 What's a vector? Why do you need it? A vector is a mathematical object used to represent some magnitudes. For example, temperature
Part I Basic Maths for Game Design 1 Chapter 1 Basic Vector Algebra 1.1 What's a vector? Why do you need it? A vector is a mathematical object used to represent some magnitudes. For example, temperature
Proseminar Graphikprogrammierung
 Proseminar Graphikprogrammierung Matthias Teschner Computer Science Department University of Freiburg Contact Matthias Teschner 052 / 01-005 teschner@informatik.uni-freiburg.de http://cg.informatik.unifreiburg.de/teaching.htm
Proseminar Graphikprogrammierung Matthias Teschner Computer Science Department University of Freiburg Contact Matthias Teschner 052 / 01-005 teschner@informatik.uni-freiburg.de http://cg.informatik.unifreiburg.de/teaching.htm
α = u v. In other words, Orthogonal Projection
 Orthogonal Projection Given any nonzero vector v, it is possible to decompose an arbitrary vector u into a component that points in the direction of v and one that points in a direction orthogonal to v
Orthogonal Projection Given any nonzero vector v, it is possible to decompose an arbitrary vector u into a component that points in the direction of v and one that points in a direction orthogonal to v
Metrics on SO(3) and Inverse Kinematics
 and Inverse Kinematics") Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Math for Game Programmers: Dual Numbers. Gino van den Bergen gino@dtecta.com
 Math for Game Programmers: Dual Numbers Gino van den Bergen gino@dtecta.com Introduction Dual numbers extend real numbers, similar to complex numbers. Complex numbers adjoin an element i, for which i 2
Math for Game Programmers: Dual Numbers Gino van den Bergen gino@dtecta.com Introduction Dual numbers extend real numbers, similar to complex numbers. Complex numbers adjoin an element i, for which i 2
Computer Graphics Labs
 Computer Graphics Labs Abel J. P. Gomes LAB. 2 Department of Computer Science and Engineering University of Beira Interior Portugal 2011 Copyright 2009-2011 All rights reserved. LAB. 2 1. Learning goals
Computer Graphics Labs Abel J. P. Gomes LAB. 2 Department of Computer Science and Engineering University of Beira Interior Portugal 2011 Copyright 2009-2011 All rights reserved. LAB. 2 1. Learning goals
Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain
 92.222 - Linear Algebra II - Spring 2004 by D. Klain") Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain 1. Orthogonal matrices and orthonormal sets An n n real-valued matrix A is said to be an orthogonal
Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain 1. Orthogonal matrices and orthonormal sets An n n real-valued matrix A is said to be an orthogonal
CIS 536/636 Introduction to Computer Graphics. Kansas State University. CIS 536/636 Introduction to Computer Graphics
 2 Lecture Outline Animation 2 of 3: Rotations, Quaternions Dynamics & Kinematics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
2 Lecture Outline Animation 2 of 3: Rotations, Quaternions Dynamics & Kinematics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
Gouvernement du Québec Ministère de l Éducation, 2004 04-00910 ISBN 2-550-43701-2
 Gouvernement du Québec Ministère de l Éducation, 2004 04-00910 ISBN 2-550-43701-2 Legal deposit Bibliothèque nationale du Québec, 2004 1. INTRODUCTION This Definition of the Domain for Summative Evaluation
Gouvernement du Québec Ministère de l Éducation, 2004 04-00910 ISBN 2-550-43701-2 Legal deposit Bibliothèque nationale du Québec, 2004 1. INTRODUCTION This Definition of the Domain for Summative Evaluation
w = COI EYE view direction vector u = w ( 010,, ) cross product with y-axis v = w u up vector
 cross product with y-axis v = w u up vector") . w COI EYE view direction vector u w ( 00,, ) cross product with -ais v w u up vector (EQ ) Computer Animation: Algorithms and Techniques 29 up vector view vector observer center of interest 30 Computer
. w COI EYE view direction vector u w ( 00,, ) cross product with -ais v w u up vector (EQ ) Computer Animation: Algorithms and Techniques 29 up vector view vector observer center of interest 30 Computer
A. OPENING POINT CLOUDS. (Notepad++ Text editor) (Cloud Compare Point cloud and mesh editor) (MeshLab Point cloud and mesh editor)
 (Cloud Compare Point cloud and mesh editor) (MeshLab Point cloud and mesh editor)") MeshLAB tutorial 1 A. OPENING POINT CLOUDS (Notepad++ Text editor) (Cloud Compare Point cloud and mesh editor) (MeshLab Point cloud and mesh editor) 2 OPENING POINT CLOUDS IN NOTEPAD ++ Let us understand
MeshLAB tutorial 1 A. OPENING POINT CLOUDS (Notepad++ Text editor) (Cloud Compare Point cloud and mesh editor) (MeshLab Point cloud and mesh editor) 2 OPENING POINT CLOUDS IN NOTEPAD ++ Let us understand
The Geometry of Perspective Projection
 The Geometry o Perspective Projection Pinhole camera and perspective projection - This is the simplest imaging device which, however, captures accurately the geometry o perspective projection. -Rays o
The Geometry o Perspective Projection Pinhole camera and perspective projection - This is the simplest imaging device which, however, captures accurately the geometry o perspective projection. -Rays o
Basic Problem: Map a 3D object to a 2D display surface. Analogy - Taking a snapshot with a camera
 3D Viewing Basic Problem: Map a 3D object to a 2D display surface Analogy - Taking a snapshot with a camera Synthetic camera virtual camera we can move to any location & orient in any way then create a
3D Viewing Basic Problem: Map a 3D object to a 2D display surface Analogy - Taking a snapshot with a camera Synthetic camera virtual camera we can move to any location & orient in any way then create a
226-332 Basic CAD/CAM. CHAPTER 5: Geometric Transformation
 226-332 Basic CAD/CAM CHAPTER 5: Geometric Transformation 1 Geometric transformation is a change in geometric characteristics such as position, orientation, and size of a geometric entity (point, line,
226-332 Basic CAD/CAM CHAPTER 5: Geometric Transformation 1 Geometric transformation is a change in geometric characteristics such as position, orientation, and size of a geometric entity (point, line,
Rotation and Inter interpolation Using Quaternion Representation
 This week CENG 732 Computer Animation Spring 2006-2007 Week 2 Technical Preliminaries and Introduction to Keframing Recap from CEng 477 The Displa Pipeline Basic Transformations / Composite Transformations
This week CENG 732 Computer Animation Spring 2006-2007 Week 2 Technical Preliminaries and Introduction to Keframing Recap from CEng 477 The Displa Pipeline Basic Transformations / Composite Transformations
Section 1.1. Introduction to R n
 The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
28 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE. v x. u y v z u z v y u y u z. v y v z
 28 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE 1.4 Cross Product 1.4.1 Definitions The cross product is the second multiplication operation between vectors we will study. The goal behind the definition
28 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE 1.4 Cross Product 1.4.1 Definitions The cross product is the second multiplication operation between vectors we will study. The goal behind the definition
State of Stress at Point
 State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
Lecture Notes. Fundamentals of Computer Graphics. Prof. Michael Langer School of Computer Science McGill University
 COMP 557 Winter 2015 Lecture Notes Fundamentals of Computer Graphics Prof. Michael Langer School of Computer Science McGill University NOTE: These lecture notes are dynamic. The initial version of the
COMP 557 Winter 2015 Lecture Notes Fundamentals of Computer Graphics Prof. Michael Langer School of Computer Science McGill University NOTE: These lecture notes are dynamic. The initial version of the
TWO-DIMENSIONAL TRANSFORMATION
 CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
Geometric Transformations
 Geometric Transformations Definitions Def: f is a mapping (function) of a set A into a set B if for every element a of A there exists a unique element b of B that is paired with a; this pairing is denoted
Geometric Transformations Definitions Def: f is a mapping (function) of a set A into a set B if for every element a of A there exists a unique element b of B that is paired with a; this pairing is denoted
Recall the basic property of the transpose (for any A): v A t Aw = v w, v, w R n.
: v A t Aw = v w, v, w R n.") ORTHOGONAL MATRICES Informally, an orthogonal n n matrix is the n-dimensional analogue of the rotation matrices R θ in R 2. When does a linear transformation of R 3 (or R n ) deserve to be called a rotation?
ORTHOGONAL MATRICES Informally, an orthogonal n n matrix is the n-dimensional analogue of the rotation matrices R θ in R 2. When does a linear transformation of R 3 (or R n ) deserve to be called a rotation?
Basic Understandings
 Activity: TEKS: Exploring Transformations Basic understandings. (5) Tools for geometric thinking. Techniques for working with spatial figures and their properties are essential to understanding underlying
Activity: TEKS: Exploring Transformations Basic understandings. (5) Tools for geometric thinking. Techniques for working with spatial figures and their properties are essential to understanding underlying
Unified Lecture # 4 Vectors
 Fall 2005 Unified Lecture # 4 Vectors These notes were written by J. Peraire as a review of vectors for Dynamics 16.07. They have been adapted for Unified Engineering by R. Radovitzky. References [1] Feynmann,
Fall 2005 Unified Lecture # 4 Vectors These notes were written by J. Peraire as a review of vectors for Dynamics 16.07. They have been adapted for Unified Engineering by R. Radovitzky. References [1] Feynmann,
B4 Computational Geometry
 3CG 2006 / B4 Computational Geometry David Murray david.murray@eng.o.ac.uk www.robots.o.ac.uk/ dwm/courses/3cg Michaelmas 2006 3CG 2006 2 / Overview Computational geometry is concerned with the derivation
3CG 2006 / B4 Computational Geometry David Murray david.murray@eng.o.ac.uk www.robots.o.ac.uk/ dwm/courses/3cg Michaelmas 2006 3CG 2006 2 / Overview Computational geometry is concerned with the derivation
Lecture L3 - Vectors, Matrices and Coordinate Transformations
 S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
Dear Accelerated Pre-Calculus Student:
 Dear Accelerated Pre-Calculus Student: I am very excited that you have decided to take this course in the upcoming school year! This is a fastpaced, college-preparatory mathematics course that will also
Dear Accelerated Pre-Calculus Student: I am very excited that you have decided to take this course in the upcoming school year! This is a fastpaced, college-preparatory mathematics course that will also
GUI GRAPHICS AND USER INTERFACES. Welcome to GUI! Mechanics. Mihail Gaianu 26/02/2014 1
 Welcome to GUI! Mechanics 26/02/2014 1 Requirements Info If you don t know C++, you CAN take this class additional time investment required early on GUI Java to C++ transition tutorial on course website
Welcome to GUI! Mechanics 26/02/2014 1 Requirements Info If you don t know C++, you CAN take this class additional time investment required early on GUI Java to C++ transition tutorial on course website
Cross product and determinants (Sect. 12.4) Two main ways to introduce the cross product
 Two main ways to introduce the cross product") Cross product and determinants (Sect. 12.4) Two main ways to introduce the cross product Geometrical definition Properties Expression in components. Definition in components Properties Geometrical expression.
Cross product and determinants (Sect. 12.4) Two main ways to introduce the cross product Geometrical definition Properties Expression in components. Definition in components Properties Geometrical expression.
Recall that two vectors in are perpendicular or orthogonal provided that their dot
 Orthogonal Complements and Projections Recall that two vectors in are perpendicular or orthogonal provided that their dot product vanishes That is, if and only if Example 1 The vectors in are orthogonal
Orthogonal Complements and Projections Recall that two vectors in are perpendicular or orthogonal provided that their dot product vanishes That is, if and only if Example 1 The vectors in are orthogonal
http://school-maths.com Gerrit Stols
 For more info and downloads go to: http://school-maths.com Gerrit Stols Acknowledgements GeoGebra is dynamic mathematics open source (free) software for learning and teaching mathematics in schools. It
For more info and downloads go to: http://school-maths.com Gerrit Stols Acknowledgements GeoGebra is dynamic mathematics open source (free) software for learning and teaching mathematics in schools. It
with functions, expressions and equations which follow in units 3 and 4.
 Grade 8 Overview View unit yearlong overview here The unit design was created in line with the areas of focus for grade 8 Mathematics as identified by the Common Core State Standards and the PARCC Model
Grade 8 Overview View unit yearlong overview here The unit design was created in line with the areas of focus for grade 8 Mathematics as identified by the Common Core State Standards and the PARCC Model
Android and OpenGL. Android Smartphone Programming. Matthias Keil. University of Freiburg
 Android and OpenGL Android Smartphone Programming Matthias Keil Institute for Computer Science Faculty of Engineering 16. Dezember 2013 Outline 1 OpenGL Introduction 2 Displaying Graphics 3 Interaction
Android and OpenGL Android Smartphone Programming Matthias Keil Institute for Computer Science Faculty of Engineering 16. Dezember 2013 Outline 1 OpenGL Introduction 2 Displaying Graphics 3 Interaction
KEANSBURG SCHOOL DISTRICT KEANSBURG HIGH SCHOOL Mathematics Department. HSPA 10 Curriculum. September 2007
 KEANSBURG HIGH SCHOOL Mathematics Department HSPA 10 Curriculum September 2007 Written by: Karen Egan Mathematics Supervisor: Ann Gagliardi 7 days Sample and Display Data (Chapter 1 pp. 4-47) Surveys and
KEANSBURG HIGH SCHOOL Mathematics Department HSPA 10 Curriculum September 2007 Written by: Karen Egan Mathematics Supervisor: Ann Gagliardi 7 days Sample and Display Data (Chapter 1 pp. 4-47) Surveys and
Section 1.4. Lines, Planes, and Hyperplanes. The Calculus of Functions of Several Variables
 The Calculus of Functions of Several Variables Section 1.4 Lines, Planes, Hyperplanes In this section we will add to our basic geometric understing of R n by studying lines planes. If we do this carefully,
The Calculus of Functions of Several Variables Section 1.4 Lines, Planes, Hyperplanes In this section we will add to our basic geometric understing of R n by studying lines planes. If we do this carefully,
Big Ideas in Mathematics
 Big Ideas in Mathematics which are important to all mathematics learning. (Adapted from the NCTM Curriculum Focal Points, 2006) The Mathematics Big Ideas are organized using the PA Mathematics Standards
Big Ideas in Mathematics which are important to all mathematics learning. (Adapted from the NCTM Curriculum Focal Points, 2006) The Mathematics Big Ideas are organized using the PA Mathematics Standards
MET 306. Activity 8a. Mechanism Design Creo 2.0 Level 7 POINT A GROUND LINK LINK 1 LINK 2 LINK 3 POINT B 10/15/2010 1
 Mechanism Design Creo 2.0 Level 7 POINT A LINK 1 GROUND LINK LINK 2 LINK 3 POINT B 10/15/2010 1 Download parts ground, key, link_1, link_2, link_3 and pulley from the V:/MET_306/Activity_8_Creo drive.
Mechanism Design Creo 2.0 Level 7 POINT A LINK 1 GROUND LINK LINK 2 LINK 3 POINT B 10/15/2010 1 Download parts ground, key, link_1, link_2, link_3 and pulley from the V:/MET_306/Activity_8_Creo drive.
Dhiren Bhatia Carnegie Mellon University
 Dhiren Bhatia Carnegie Mellon University University Course Evaluations available online Please Fill! December 4 : In-class final exam Held during class time All students expected to give final this date
Dhiren Bhatia Carnegie Mellon University University Course Evaluations available online Please Fill! December 4 : In-class final exam Held during class time All students expected to give final this date
The Essentials of CAGD
 The Essentials of CAGD Chapter 2: Lines and Planes Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford
The Essentials of CAGD Chapter 2: Lines and Planes Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford
1 Symmetries of regular polyhedra
 1230, notes 5 1 Symmetries of regular polyhedra Symmetry groups Recall: Group axioms: Suppose that (G, ) is a group and a, b, c are elements of G. Then (i) a b G (ii) (a b) c = a (b c) (iii) There is an
1230, notes 5 1 Symmetries of regular polyhedra Symmetry groups Recall: Group axioms: Suppose that (G, ) is a group and a, b, c are elements of G. Then (i) a b G (ii) (a b) c = a (b c) (iii) There is an
Computer Graphics CS 543 Lecture 12 (Part 1) Curves. Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)
 Curves. Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)") Computer Graphics CS 54 Lecture 1 (Part 1) Curves Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) So Far Dealt with straight lines and flat surfaces Real world objects include
Computer Graphics CS 54 Lecture 1 (Part 1) Curves Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) So Far Dealt with straight lines and flat surfaces Real world objects include
Linear Algebra: Vectors
 A Linear Algebra: Vectors A Appendix A: LINEAR ALGEBRA: VECTORS TABLE OF CONTENTS Page A Motivation A 3 A2 Vectors A 3 A2 Notational Conventions A 4 A22 Visualization A 5 A23 Special Vectors A 5 A3 Vector
A Linear Algebra: Vectors A Appendix A: LINEAR ALGEBRA: VECTORS TABLE OF CONTENTS Page A Motivation A 3 A2 Vectors A 3 A2 Notational Conventions A 4 A22 Visualization A 5 A23 Special Vectors A 5 A3 Vector
Mathematics Course 111: Algebra I Part IV: Vector Spaces
 Mathematics Course 111: Algebra I Part IV: Vector Spaces D. R. Wilkins Academic Year 1996-7 9 Vector Spaces A vector space over some field K is an algebraic structure consisting of a set V on which are
Mathematics Course 111: Algebra I Part IV: Vector Spaces D. R. Wilkins Academic Year 1996-7 9 Vector Spaces A vector space over some field K is an algebraic structure consisting of a set V on which are
Introduction to 2D and 3D Computer Graphics Mastering 2D & 3D Computer Graphics Pipelines
 Introduction to 2D and 3D Computer Graphics Mastering 2D & 3D Computer Graphics Pipelines CS447 3-1 Mastering 2D & 3D Graphics Overview of 2D & 3D Pipelines What are pipelines? What are the fundamental
Introduction to 2D and 3D Computer Graphics Mastering 2D & 3D Computer Graphics Pipelines CS447 3-1 Mastering 2D & 3D Graphics Overview of 2D & 3D Pipelines What are pipelines? What are the fundamental
Cabri Geometry Application User Guide
 Cabri Geometry Application User Guide Preview of Geometry... 2 Learning the Basics... 3 Managing File Operations... 12 Setting Application Preferences... 14 Selecting and Moving Objects... 17 Deleting
Cabri Geometry Application User Guide Preview of Geometry... 2 Learning the Basics... 3 Managing File Operations... 12 Setting Application Preferences... 14 Selecting and Moving Objects... 17 Deleting
Rotation Matrices and Homogeneous Transformations
 Rotation Matrices and Homogeneous Transformations A coordinate frame in an n-dimensional space is defined by n mutually orthogonal unit vectors. In particular, for a two-dimensional (2D) space, i.e., n
Rotation Matrices and Homogeneous Transformations A coordinate frame in an n-dimensional space is defined by n mutually orthogonal unit vectors. In particular, for a two-dimensional (2D) space, i.e., n
Mathematics (MAT) MAT 061 Basic Euclidean Geometry 3 Hours. MAT 051 Pre-Algebra 4 Hours
 MAT 061 Basic Euclidean Geometry 3 Hours. MAT 051 Pre-Algebra 4 Hours") MAT 051 Pre-Algebra Mathematics (MAT) MAT 051 is designed as a review of the basic operations of arithmetic and an introduction to algebra. The student must earn a grade of C or in order to enroll in MAT
MAT 051 Pre-Algebra Mathematics (MAT) MAT 051 is designed as a review of the basic operations of arithmetic and an introduction to algebra. The student must earn a grade of C or in order to enroll in MAT
Solution Guide III-C. 3D Vision. Building Vision for Business. MVTec Software GmbH
 Solution Guide III-C 3D Vision MVTec Software GmbH Building Vision for Business Machine vision in 3D world coordinates, Version 10.0.4 All rights reserved. No part of this publication may be reproduced,
Solution Guide III-C 3D Vision MVTec Software GmbH Building Vision for Business Machine vision in 3D world coordinates, Version 10.0.4 All rights reserved. No part of this publication may be reproduced,
LINEAR ALGEBRA. September 23, 2010
 LINEAR ALGEBRA September 3, 00 Contents 0. LU-decomposition.................................... 0. Inverses and Transposes................................. 0.3 Column Spaces and NullSpaces.............................
LINEAR ALGEBRA September 3, 00 Contents 0. LU-decomposition.................................... 0. Inverses and Transposes................................. 0.3 Column Spaces and NullSpaces.............................
South Carolina College- and Career-Ready (SCCCR) Pre-Calculus
 Pre-Calculus") South Carolina College- and Career-Ready (SCCCR) Pre-Calculus Key Concepts Arithmetic with Polynomials and Rational Expressions PC.AAPR.2 PC.AAPR.3 PC.AAPR.4 PC.AAPR.5 PC.AAPR.6 PC.AAPR.7 Standards Know
South Carolina College- and Career-Ready (SCCCR) Pre-Calculus Key Concepts Arithmetic with Polynomials and Rational Expressions PC.AAPR.2 PC.AAPR.3 PC.AAPR.4 PC.AAPR.5 PC.AAPR.6 PC.AAPR.7 Standards Know
H.Calculating Normal Vectors
 Appendix H H.Calculating Normal Vectors This appendix describes how to calculate normal vectors for surfaces. You need to define normals to use the OpenGL lighting facility, which is described in Chapter
Appendix H H.Calculating Normal Vectors This appendix describes how to calculate normal vectors for surfaces. You need to define normals to use the OpenGL lighting facility, which is described in Chapter
1 2 3 1 1 2 x = + x 2 + x 4 1 0 1
 (d) If the vector b is the sum of the four columns of A, write down the complete solution to Ax = b. 1 2 3 1 1 2 x = + x 2 + x 4 1 0 0 1 0 1 2. (11 points) This problem finds the curve y = C + D 2 t which
(d) If the vector b is the sum of the four columns of A, write down the complete solution to Ax = b. 1 2 3 1 1 2 x = + x 2 + x 4 1 0 0 1 0 1 2. (11 points) This problem finds the curve y = C + D 2 t which
University of Tampere Computer Graphics 2013 School of Information Sciences Exercise 2 7.2.2013
 University of Tampere Computer Graphics 2013 School of Information Sciences Exercise 2 7.2.2013 1. We can get the minmum of parabola f(x) = ax 2 + bx + c,a > 0,, when f (x) = 0. In this case x has the
University of Tampere Computer Graphics 2013 School of Information Sciences Exercise 2 7.2.2013 1. We can get the minmum of parabola f(x) = ax 2 + bx + c,a > 0,, when f (x) = 0. In this case x has the
Questions. Strategies August/September Number Theory. What is meant by a number being evenly divisible by another number?
 Content Skills Essential August/September Number Theory Identify factors List multiples of whole numbers Classify prime and composite numbers Analyze the rules of divisibility What is meant by a number
Content Skills Essential August/September Number Theory Identify factors List multiples of whole numbers Classify prime and composite numbers Analyze the rules of divisibility What is meant by a number
Course Overview. CSCI 480 Computer Graphics Lecture 1. Administrative Issues Modeling Animation Rendering OpenGL Programming [Angel Ch.
 CSCI 480 Computer Graphics Lecture 1 Course Overview January 14, 2013 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s13/ Administrative Issues Modeling Animation
CSCI 480 Computer Graphics Lecture 1 Course Overview January 14, 2013 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s13/ Administrative Issues Modeling Animation
B2.53-R3: COMPUTER GRAPHICS. NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions.
 B2.53-R3: COMPUTER GRAPHICS NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions. 2. PART ONE is to be answered in the TEAR-OFF ANSWER
B2.53-R3: COMPUTER GRAPHICS NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions. 2. PART ONE is to be answered in the TEAR-OFF ANSWER
Geometry Course Summary Department: Math. Semester 1
 Geometry Course Summary Department: Math Semester 1 Learning Objective #1 Geometry Basics Targets to Meet Learning Objective #1 Use inductive reasoning to make conclusions about mathematical patterns Give
Geometry Course Summary Department: Math Semester 1 Learning Objective #1 Geometry Basics Targets to Meet Learning Objective #1 Use inductive reasoning to make conclusions about mathematical patterns Give
Solving Systems of Linear Equations
 LECTURE 5 Solving Systems of Linear Equations Recall that we introduced the notion of matrices as a way of standardizing the expression of systems of linear equations In today s lecture I shall show how
LECTURE 5 Solving Systems of Linear Equations Recall that we introduced the notion of matrices as a way of standardizing the expression of systems of linear equations In today s lecture I shall show how
Introduction to Algebraic Geometry. Bézout s Theorem and Inflection Points
 Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
Institution : Majmaah University. Academic Department : College of Science at AzZulfi. Programme : Computer Science and Information Course :
 Institution : Majmaah University. Academic Department : College of Science at AzZulfi. Programme : Computer Science and Information Course : Computer Graphics (CSI-425) Course Coordinator : Mr. ISSA ALSMADI
Institution : Majmaah University. Academic Department : College of Science at AzZulfi. Programme : Computer Science and Information Course : Computer Graphics (CSI-425) Course Coordinator : Mr. ISSA ALSMADI
How To Teach Computer Graphics
 Computer Graphics Thilo Kielmann Lecture 1: 1 Introduction (basic administrative information) Course Overview + Examples (a.o. Pixar, Blender, ) Graphics Systems Hands-on Session General Introduction http://www.cs.vu.nl/~graphics/
Computer Graphics Thilo Kielmann Lecture 1: 1 Introduction (basic administrative information) Course Overview + Examples (a.o. Pixar, Blender, ) Graphics Systems Hands-on Session General Introduction http://www.cs.vu.nl/~graphics/
COMP175: Computer Graphics. Lecture 1 Introduction and Display Technologies
 COMP175: Computer Graphics Lecture 1 Introduction and Display Technologies Course mechanics Number: COMP 175-01, Fall 2009 Meetings: TR 1:30-2:45pm Instructor: Sara Su (sarasu@cs.tufts.edu) TA: Matt Menke
COMP175: Computer Graphics Lecture 1 Introduction and Display Technologies Course mechanics Number: COMP 175-01, Fall 2009 Meetings: TR 1:30-2:45pm Instructor: Sara Su (sarasu@cs.tufts.edu) TA: Matt Menke
Advanced Computer Graphics (2IV40) ~ 3D Transformations. Types (geometric) Types (algebraic) 3D Transformations. y + c 1. x = a 1.
 ~ 3D Transformations. Types (geometric) Types (algebraic) 3D Transformations. y + c 1. x = a 1.") Advanced Computer Graphics (2IV40) ~ 3D Transformations Kees Huiing Huub van de Wetering Winter 2005/6 Tpes (geometric) maintain distances & orientation (LH/RH): rigid bod transforms (rotations, translations)
Advanced Computer Graphics (2IV40) ~ 3D Transformations Kees Huiing Huub van de Wetering Winter 2005/6 Tpes (geometric) maintain distances & orientation (LH/RH): rigid bod transforms (rotations, translations)
MATH1231 Algebra, 2015 Chapter 7: Linear maps
 MATH1231 Algebra, 2015 Chapter 7: Linear maps A/Prof. Daniel Chan School of Mathematics and Statistics University of New South Wales danielc@unsw.edu.au Daniel Chan (UNSW) MATH1231 Algebra 1 / 43 Chapter
MATH1231 Algebra, 2015 Chapter 7: Linear maps A/Prof. Daniel Chan School of Mathematics and Statistics University of New South Wales danielc@unsw.edu.au Daniel Chan (UNSW) MATH1231 Algebra 1 / 43 Chapter
What's the Spin? - Discover Properties of Geometric Rotations
 What's the Spin? - Discover Properties of Geometric Rotations Geometry Major Topics: Rotations and their relation to reflections NCTM Principles and Standards: Content Standards Geometry Apply transformations
What's the Spin? - Discover Properties of Geometric Rotations Geometry Major Topics: Rotations and their relation to reflections NCTM Principles and Standards: Content Standards Geometry Apply transformations