A surface f : M R 3 is minimal if: M has MEAN CURVATURE = 0. Coordinate functions are Conformal Gauss map G: M S 2 = C { }. MEROMORPHIC GAUSS MAP
|
|
|
- Winfred Little
- 7 years ago
- Views:
Transcription
1 Definition of minimal surface A surface f : M R 3 is minimal if: M has MEAN CURVATURE = 0. Small pieces have Small pieces have Small pieces occur as Coordinate functions are LEAST AREA. LEAST ENERGY. SOAP FILMS. HARMONIC. Conformal Gauss map G: M S 2 = C { }. MEROMORPHIC GAUSS MAP
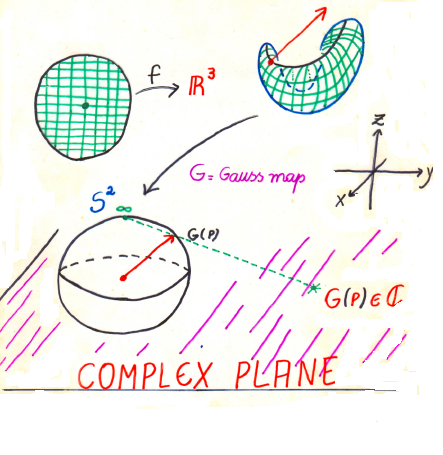
2 Meromorphic Gauss map
3 Weierstrass Representation Suppose f : M R 3 is minimal, g : M C { }, is the meromorphic Gauss map, dh = dx 3 + i dx 3, is the holomorphic height differential. Then p [ 1 1 f(p) = Re 2 g g, i ( ) ] 1 2 g + g, 1 dh.
 = e")
4 Helicoid Image by Matthias Weber M = C dh = dz = dx+i dy g(z) = e iz
5 Catenoid Image by Matthias Weber M = C {(0, 0)} dh = 1 z dz g(z) = z
6 Finite topology minimal surfaces with 1 end Theorem (Meeks, Rosenberg) A complete, embedded, simply-connected minimal surface in R 3 is a plane or a helicoid. Theorem (Meeks, Rosenberg) Every properly embedded, non-planar minimal surface in R 3 with finite genus and one end has the conformal structure of a compact Riemann surface M g of genus g minus one point, can be represented by meromorphic data on M g and is asymptotic to a helicoid.
7 Finite topology minimal surfaces Theorem (Collin) If M R 3 is a properly embedded minimal surface with more than one end, then each annular end of M is asymptotic to the end of a plane or a catenoid. In particular, if M has finite topology and more than one end, then M has finite total Gaussian curvature. Theorem (Meeks, Rosenberg) Every properly embedded, non-planar minimal surface in R 3 /G with finite genus has the conformal structure of a compact Riemann surface M g of genus g punctured in a finite number of points and can be represented by meromorphic data on M g. Each annular end is asymptotic to the quotient of a half-helicoid (helicoidal), a plane (planar) or a half-plane (Scherk type).
8 Properness of finite genus/topology examples Theorem (Colding, Minicozzi) A complete, embedded minimal surface of finite topology in R 3 is properly embedded. Theorem (Meeks, Perez, Ros) A complete, embedded minimal surface of finite genus and a countable number of ends in R 3 or in R 3 /G is properly embedded.
9 Catenoid. Image by Matthias Weber Key Properties: In 1741, Euler discovered that when a catenary x 1 = cosh x 3 is rotated around the x 3 -axis, then one obtains a surface which minimizes area among surfaces of revolution after prescribing boundary values for the generating curves. In 1776, Meusnier verified that the catenoid has zero mean curvature. This surface has genus zero, two ends and total curvature 4π.
10 Catenoid. Image by Matthias Weber Key Properties: Together with the plane, the catenoid is the only minimal surface of revolution (Euler and Bonnet). It is the unique complete, embedded minimal surface with genus zero, finite topology and more than one end (López and Ros). The catenoid is characterized as being the unique complete, embedded minimal surface with finite topology and two ends (Schoen).
11 Helicoid. Image by Matthias Weber Key Properties: Proved to be minimal by Meusnier in The helicoid has genus zero, one end and infinite total curvature. Together with the plane, the helicoid is the only ruled minimal surface (Catalan). It is the unique simply-connected, complete, embedded minimal surface (Meeks and Rosenberg, Colding and Minicozzi).
12 Enneper surface. Image by Matthias Weber Key Properties: Weierstrass Data: M = C, g(z) = z, dh = z dz. Discovered by Enneper in 1864, using his newly formulated analytic representation of minimal surfaces in terms of holomorphic data, equivalent to the Weierstrass representation. This surface is non-embedded, has genus zero, one end and total curvature 4π. It contains two horizontal orthogonal lines and the surface has two vertical planes of reflective symmetry.
13 Meeks minimal Möbius strip. Image by Matthias Weber Key Properties: ( Weierstrass Data: M = C {0}, g(z) = z 2 z+1 z 1 ( ) z dh = i 2 1 z dz. 2 Found by Meeks in 1981, the minimal surface defined by this Weierstrass pair double covers a complete, immersed minimal surface M 1 R 3 which is topologically a Möbius strip. This is the unique complete, minimally immersed surface in R 3 of finite total curvature 6π (Meeks). ),
14 Bent helicoids. Image by Matthias Weber Key Properties: Weierstrass Data: M = C {0}, g(z) = z zn +i, dh = zn +z n dz. iz n +i 2z Discovered in 2004 by Meeks and Weber and independently by Mira.
15 Costa torus. Image by Matthias Weber Key Properties: Weierstrass Data: Based on the square torus M = C/Z 2 {(0, 0), ( 1, 0), (0, 1 )}, g(z) = P(z). 2 2 Discovered in 1982 by Costa. This is a thrice punctured torus with total curvature 12π, two catenoidal ends and one planar middle end. Hoffman and Meeks proved its global embeddedness. The Costa surface contains two horizontal straight lines l 1, l 2 that intersect orthogonally, and has vertical planes of symmetry bisecting the right angles made by l 1, l 2.
16 Costa-Hoffman-Meeks surfaces. Image by M. Weber Key Properties: Weierstrass Data: Defined in terms of cyclic covers of S 2. These examples M k generalize the Costa torus, and are complete, embedded, genus k minimal surfaces with two catenoidal ends and one planar middle end. Both existence and embeddedness were given by Hoffman and Meeks.
 where the planar end becomes catenoidal.")
17 Deformation of the Costa torus. Image by M. Weber Key Properties: The Costa surface is defined on a square torus M 1,1, and admits a deformation (found by Hoffman and Meeks, unpublished) where the planar end becomes catenoidal. For any a (0, ), take M = M 1,a (which varies on arbitrary rectangular tori), a = 1 gives the Costa torus. Hoffman and Karcher proved existence/embeddedness.
18 Genus-one helicoid. Figure: Left: The genus one helicoid. Center and Right: Two views of the (possibly existing) genus two helicoid. The arrow in the figure at the right points to the second handle. Images courtesy of M. Schmies (left, center) and M. Traizet (right). Key Properties: M is conformally a certain rhombic torus T minus one point E. If we view T as a rhombus with edges identified in the usual manner, then E corresponds to the vertices of the rhombus. The diagonals of T are mapped into perpendicular straight lines contained in the surface, intersecting at a single point in space.
19 Genus-one helicoid. Key Properties: The unique end of M is asymptotic to a helicoid, so that one of the two lines contained in the surface is an axis (like in the genuine helicoid). The Gauss map g is a meromorphic function on T {E} with an essential singularity at E, and both dg/g and dh extend meromorphically to T. Discovered in 1993 by Hoffman, Karcher and Wei. Proved embedded in 2007 by Hoffman, Weber and Wolf.
20 Singly-periodic Scherk surfaces. Image by M. Weber Key Properties: Weierstrass Data: M = (C { }) {±e ±iθ/2 }, g(z) = z, dh =, for fixed θ (0, π/2]. iz dz (z±e ±iθ/2 ) Discovered by Scherk in 1835, these surfaces denoted by S θ form a 1-parameter family of complete, embedded, genus zero minimal surfaces in a quotient of R 3 by a translation, and have four annular ends. Viewed in R 3, each surface S θ is invariant under reflection in the (x 1, x 3) and (x 2, x 3)-planes and in horizontal planes at integer heights, and can be thought of geometrically as a desingularization of two vertical planes forming an angle of θ.
21 Singly-periodic Scherk surfaces. Image by M. Weber Key Properties: The special case S θ=π/2 also contains pairs of orthogonal lines at planes of half-integer heights, and has implicit equation sin z = sinh x sinh y. Together with the plane and catenoid, the surfaces S θ are conjectured to be the only connected, complete, immersed, minimal surfaces in R 3 whose area in balls of radius R is less than 2πR 2. This conjecture was proved by Meeks and Wolf under the additional hypothesis of infinite symmetry..
22 Doubly-periodic Scherk surfaces. Image by M. Weber Key Properties: Weierstrass Data: M = (C { }) {±e ±iθ/2 }, g(z) = z, z dz dh =, where θ (0, π/2] (the case θ = π. (z±e ±iθ/2 ) 2 It has implicit equation e z cos y = cos x. Discovered by Scherk in 1835, are the conjugate surfaces to the singly-periodic Scherk surfaces.
23 Doubly-periodic Scherk surfaces. Image by M. Weber Key Properties: These surfaces are doubly-periodic with genus zero in their corresponding quotient T 2 R of R 3, and were characterized by Lazard-Holly and Meeks as being the unique properly embedded minimal surfaces with genus zero in any T 2 R..
24 Schwarz Primitive triply-periodic surface. Image by Weber Key Properties: Weierstrass Data: M = {(z, w) (C { }) 2 w 2 = z 8 14z 4 + 1}, g(z, w) = z, dh = z dz. w Discovered by Schwarz in the 1880 s, it is also called the P-surface. This surface has a rank three symmetry group and is invariant by translations in Z 3. Such a structure, common to any triply-periodic minimal surface (TPMS), is also known as a crystallographic cell or space tiling. Embedded TPMS divide R 3 into two connected components (called labyrinths in crystallography), sharing M as boundary (or interface) and interweaving each other.
25 Schwarz Primitive triply-periodic surface. Image by Weber Key Properties: This property makes TPMS objects of interest to neighboring sciences as material sciences, crystallography, biology and others. For example, the interface between single calcite crystals and amorphous organic matter in the skeletal element in sea urchins is approximately described by the Schwarz Primitive surface. The piece of a TPMS that lies inside a crystallographic cell of the tiling is called a fundamental domain.
26 Schwarz Diamond surfaces. Image by M. Weber Discovered by Schwarz, it is the conjugate surface to the P-surface, and is another famous example of an embedded TPMS.
27 Schoen s triply-periodic Gyroid surface. Image by Weber In the 1960 s, Schoen made a surprising discovery: another minimal surface locally isometric to the Primitive and Diamond surface is an embedded TPMS, and named this surface the Gyroid.
28 1860 Riemann s discovery! Image by Matthias Weber
29 Riemann minimal examples. Image by Matthias Weber Key Properties: Discovered in 1860 by Riemann, these examples are invariant under reflection in the (x 1, x 3 )-plane and by a translation T λ, and in the quotient space R 3 /T λ have genus one and two planar ends. After appropriate scalings, they converge to catenoids as t 0 or to helicoids as t. The Riemann minimal examples have the amazing property that every horizontal plane intersects the surface in a circle or in a line. Meeks, Pérez and Ros proved these surfaces are the only properly embedded minimal surfaces in R 3 of genus 0 and infinite topology.
30 KMR doubly-periodic tori. Figure: Two examples of doubly-periodic KMR surfaces. Images taken from the 3D-XplorMath Surface Gallery Key Properties: The conjugate surface of any KMR surface also lies in this family. The first KMR surfaces were found by Karcher in At the same time Meeks and Rosenberg found examples of the same type as Karcher s. In 2005, Pérez, Rodríguez and Traizet gave a general construction that produces all possible complete, embedded minimal tori with parallel ends in any T 2 R, and proved that this moduli space reduces to the three-dimensional family of KMR surfaces.
31 Callahan-Hoffman-Meeks surfaces. Image by M. Weber Key Properties: In 1989, Callahan, Hoffman and Meeks generalized the Riemann minimal examples by constructing for any integer k 1 a singly-periodic, properly embedded minimal surface M k R 3 with infinite genus and an infinite number of horizontal planar ends at integer heights and are invariant under the orientation preserving translation by vector T = (0, 0, 2), such that M k /T has genus 2k + 1 and two ends. Every horizontal plane at a non-integer height intersects M k in a simple closed curve. Every horizontal plane at an integer height intersects M k in k + 1 straight lines that meet at equal angles along the x 3-axis.
32 Introduction and history of the problem Problem: Classify all PEMS in R 3 with genus zero. k = #{ends} López-Ros, 1991: Finite total curvature plane, catenoid
33 Introduction and history of the problem Problem: Classify all PEMS in R 3 with genus zero. k = #{ends} López-Ros, 1991: Finite total curvature plane, catenoid
34 Introduction and history of the problem Problem: Classify all PEMS in R 3 with genus zero. k = #{ends} López-Ros, 1991: Finite total curvature plane, catenoid
35 Introduction and history of the problem Problem: Classify all PEMS in R 3 with genus zero. k = #{ends} López-Ros, 1991: Finite total curvature plane, catenoid Collin, 1997: Finite topology and k > 1 finite total curvature.
36 Introduction and history of the problem Problem: Classify all PEMS in R 3 with genus zero. k = #{ends} López-Ros, 1991: Finite total curvature plane, catenoid Collin, 1997: Finite topology and k > 1 finite total curvature. Colding-Minicozzi, 2004: limits of simply connected minimal surfaces = minimal laminations.
37 Introduction and history of the problem Problem: Classify all PEMS in R 3 with genus zero. k = #{ends} López-Ros, 1991: Finite total curvature plane, catenoid Collin, 1997: Finite topology and k > 1 finite total curvature. Colding-Minicozzi, 2004: limits of simply connected minimal surfaces = minimal laminations. Meeks-Rosenberg, 2005: k = 1 plane, helicoid.
38 Introduction and history of the problem Problem: Classify all PEMS in R 3 with genus zero. k = #{ends} López-Ros, 1991: Finite total curvature plane, catenoid Collin, 1997: Finite topology and k > 1 finite total curvature. Colding-Minicozzi, 2004: limits of simply connected minimal surfaces = minimal laminations. Meeks-Rosenberg, 2005: k = 1 plane, helicoid. Theorem (Meeks, Pérez, Ros, 2007) k = Riemann minimal examples.

39 The family R t of Riemann minimal examples
40 Cylindrical parametrization of a Riemann minimal example
41 1860 Riemann s discovery! Image by Matthias Weber
42 Cylindrical parametrization of a Riemann minimal example
43 Conformal compactification of a Riemann minimal example
44 The moduli space of genus-zero examples
45 Riemann minimal examples near helicoid limits
46 Classification of infinite topology g = 0 examples Theorem (Meeks, Perez and Ros) A PEMS in R 3 with genus zero and infinite topology is a Riemann minimal example. We now outline the main steps of the proof of this theorem. Throughout this outline, M R 3 denotes a PEMS with genus zero and infinite topology.
47 Step 1: Control the topology of M Theorem (Frohman-Meeks, C-K-M-R) Let R 3 be a PEMS with an infinite set of ends E. After a rotation of, E has a natural linear ordering by relative heights of the ends over the xy-plane; has one or two limit ends, each of which must be a top or bottom end in the ordering. Theorem (Meeks, Perez, Ros) The surface M has two limit ends. Idea of the proof M has 2 limit ends. One studies the possible singular minimal lamination limits of homothetic shrinkings of M to obtain a contradiction if M has only one limit end.
48 A proper g = 0 surface with uncountable # of ends
49 Step 2: Understand the geometry of M M can be parametrized conformally as f : (S 1 R) E R 3 with f 3 (θ, t) = t so that: The middle ends E = {(θ n, t n )} n Z are planar. M has bounded curvature, uniform local area estimates and is quasiperiodic. For each t, consider the plane curve γ t (θ) = f(θ, t) with speed λ = λ t (θ) = γ t(θ) and geodesic curvature κ = κ t (θ). Then the Shiffman function S M = λ κ θ extends to a bounded analytic function on S 1 R. S M is a Jacobi function when considered to be defined on M. ( 2K M ) S M = 0.
50 Step 3: Prove the Shiffman function S M is integrable S M is integrable in the following sense. There exists a family M t of examples with M 0 = M such that the normal variational vector field to each M t corresponds to S Mt. The proof of integrability of S M depends on: ( 2K M ) has finite dimensional bounded kernel; S M viewed as an infinitesimal variation of Weierstrass data defined on C, can be formulated by the KdV evolution equation. KdV theory completes proof of integrability.
51 The Korteweg-de Vries equation (KdV) ġ S = i 2 ( ) g 3 g g g + 3 (g ) 3 2 T g 2 g W (Shiffman) Question: Can we integrate ġ S? (This solves the problem) (mkdv) Miura transf (KdV) x=g ġ /g S ẋ = i 2 (x 3 2 x 2 x ) u=ax +bx 2 u = u 6uu u = 3(g ) 2 + g 4g 2 2g KdV hierarchy (infinitesimal deformations of u) u t 0 = u u t 1 = u 6uu u t 2 = u (5) 10uu 20u u 30u 2 u. u algebro-geometric def n, u t n All flows commute: t n Span{ u t 0,..., u t m = u t m t n u t n 1 }
52 Step 4: Show S M = 0 The property that S M = 0 is equivalent to the property that M is foliated by circles and lines in horizontal planes. Theorem (Riemann 1860) If M is foliated by circles and lines in horizontal planes, then M is a Riemann minimal example. Holomorphic integrability of S M, together with the compactness of the moduli space of embedded examples, forces S M to be linear, which requires the analytic data defining M to be periodic. In 1997, we proved that S M = 0 for periodic examples. Hence, M is a Riemann minimal example.

53 A Riemann minimal example Image by Matthias Weber
54 1860 Riemann s discovery! Image by Matthias Weber
RAJALAKSHMI ENGINEERING COLLEGE MA 2161 UNIT I - ORDINARY DIFFERENTIAL EQUATIONS PART A
 RAJALAKSHMI ENGINEERING COLLEGE MA 26 UNIT I - ORDINARY DIFFERENTIAL EQUATIONS. Solve (D 2 + D 2)y = 0. 2. Solve (D 2 + 6D + 9)y = 0. PART A 3. Solve (D 4 + 4)x = 0 where D = d dt 4. Find Particular Integral:
RAJALAKSHMI ENGINEERING COLLEGE MA 26 UNIT I - ORDINARY DIFFERENTIAL EQUATIONS. Solve (D 2 + D 2)y = 0. 2. Solve (D 2 + 6D + 9)y = 0. PART A 3. Solve (D 4 + 4)x = 0 where D = d dt 4. Find Particular Integral:
State of Stress at Point
 State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
Section 1.1. Introduction to R n
 The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
6. Define log(z) so that π < I log(z) π. Discuss the identities e log(z) = z and log(e w ) = w.
 so that π < I log(z) π. Discuss the identities e log(z) = z and log(e w ) = w.") hapter omplex integration. omplex number quiz. Simplify 3+4i. 2. Simplify 3+4i. 3. Find the cube roots of. 4. Here are some identities for complex conjugate. Which ones need correction? z + w = z + w,
hapter omplex integration. omplex number quiz. Simplify 3+4i. 2. Simplify 3+4i. 3. Find the cube roots of. 4. Here are some identities for complex conjugate. Which ones need correction? z + w = z + w,
Solutions to Practice Problems
 Higher Geometry Final Exam Tues Dec 11, 5-7:30 pm Practice Problems (1) Know the following definitions, statements of theorems, properties from the notes: congruent, triangle, quadrilateral, isosceles
Higher Geometry Final Exam Tues Dec 11, 5-7:30 pm Practice Problems (1) Know the following definitions, statements of theorems, properties from the notes: congruent, triangle, quadrilateral, isosceles
11.1. Objectives. Component Form of a Vector. Component Form of a Vector. Component Form of a Vector. Vectors and the Geometry of Space
 11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
4. Expanding dynamical systems
 4.1. Metric definition. 4. Expanding dynamical systems Definition 4.1. Let X be a compact metric space. A map f : X X is said to be expanding if there exist ɛ > 0 and L > 1 such that d(f(x), f(y)) Ld(x,
4.1. Metric definition. 4. Expanding dynamical systems Definition 4.1. Let X be a compact metric space. A map f : X X is said to be expanding if there exist ɛ > 0 and L > 1 such that d(f(x), f(y)) Ld(x,
Computer Animation and the Geometry of Surfaces in 3- and 4-Space
 Proceedings of the International Congress of Mathematicians Helsinki, 1978 Computer Animation and the Geometry of Surfaces in 3- and 4-Space Thomas F. Banchoff Geometers have always used any available
Proceedings of the International Congress of Mathematicians Helsinki, 1978 Computer Animation and the Geometry of Surfaces in 3- and 4-Space Thomas F. Banchoff Geometers have always used any available
Metric Spaces. Chapter 7. 7.1. Metrics
 Chapter 7 Metric Spaces A metric space is a set X that has a notion of the distance d(x, y) between every pair of points x, y X. The purpose of this chapter is to introduce metric spaces and give some
Chapter 7 Metric Spaces A metric space is a set X that has a notion of the distance d(x, y) between every pair of points x, y X. The purpose of this chapter is to introduce metric spaces and give some
tr g φ hdvol M. 2 The Euler-Lagrange equation for the energy functional is called the harmonic map equation:
 Notes prepared by Andy Huang (Rice University) In this note, we will discuss some motivating examples to guide us to seek holomorphic objects when dealing with harmonic maps. This will lead us to a brief
Notes prepared by Andy Huang (Rice University) In this note, we will discuss some motivating examples to guide us to seek holomorphic objects when dealing with harmonic maps. This will lead us to a brief
Solutions to Homework 10
 Solutions to Homework 1 Section 7., exercise # 1 (b,d): (b) Compute the value of R f dv, where f(x, y) = y/x and R = [1, 3] [, 4]. Solution: Since f is continuous over R, f is integrable over R. Let x
Solutions to Homework 1 Section 7., exercise # 1 (b,d): (b) Compute the value of R f dv, where f(x, y) = y/x and R = [1, 3] [, 4]. Solution: Since f is continuous over R, f is integrable over R. Let x
Arrangements And Duality
 Arrangements And Duality 3.1 Introduction 3 Point configurations are tbe most basic structure we study in computational geometry. But what about configurations of more complicated shapes? For example,
Arrangements And Duality 3.1 Introduction 3 Point configurations are tbe most basic structure we study in computational geometry. But what about configurations of more complicated shapes? For example,
Various Ways of Representing Surfaces and Basic Examples
 Chapter 1 Various Ways of Representing Surfaces and Basic Examples Lecture 1. a. First examples. For many people, one of the most basic images of a surface is the surface of the Earth. Although it looks
Chapter 1 Various Ways of Representing Surfaces and Basic Examples Lecture 1. a. First examples. For many people, one of the most basic images of a surface is the surface of the Earth. Although it looks
MAT 1341: REVIEW II SANGHOON BAEK
 MAT 1341: REVIEW II SANGHOON BAEK 1. Projections and Cross Product 1.1. Projections. Definition 1.1. Given a vector u, the rectangular (or perpendicular or orthogonal) components are two vectors u 1 and
MAT 1341: REVIEW II SANGHOON BAEK 1. Projections and Cross Product 1.1. Projections. Definition 1.1. Given a vector u, the rectangular (or perpendicular or orthogonal) components are two vectors u 1 and
3 Contour integrals and Cauchy s Theorem
 3 ontour integrals and auchy s Theorem 3. Line integrals of complex functions Our goal here will be to discuss integration of complex functions = u + iv, with particular regard to analytic functions. Of
3 ontour integrals and auchy s Theorem 3. Line integrals of complex functions Our goal here will be to discuss integration of complex functions = u + iv, with particular regard to analytic functions. Of
3. INNER PRODUCT SPACES
 . INNER PRODUCT SPACES.. Definition So far we have studied abstract vector spaces. These are a generalisation of the geometric spaces R and R. But these have more structure than just that of a vector space.
. INNER PRODUCT SPACES.. Definition So far we have studied abstract vector spaces. These are a generalisation of the geometric spaces R and R. But these have more structure than just that of a vector space.
Adding vectors We can do arithmetic with vectors. We ll start with vector addition and related operations. Suppose you have two vectors
 1 Chapter 13. VECTORS IN THREE DIMENSIONAL SPACE Let s begin with some names and notation for things: R is the set (collection) of real numbers. We write x R to mean that x is a real number. A real number
1 Chapter 13. VECTORS IN THREE DIMENSIONAL SPACE Let s begin with some names and notation for things: R is the set (collection) of real numbers. We write x R to mean that x is a real number. A real number
Surface bundles over S 1, the Thurston norm, and the Whitehead link
 Surface bundles over S 1, the Thurston norm, and the Whitehead link Michael Landry August 16, 2014 The Thurston norm is a powerful tool for studying the ways a 3-manifold can fiber over the circle. In
Surface bundles over S 1, the Thurston norm, and the Whitehead link Michael Landry August 16, 2014 The Thurston norm is a powerful tool for studying the ways a 3-manifold can fiber over the circle. In
The Math Circle, Spring 2004
 The Math Circle, Spring 2004 (Talks by Gordon Ritter) What is Non-Euclidean Geometry? Most geometries on the plane R 2 are non-euclidean. Let s denote arc length. Then Euclidean geometry arises from the
The Math Circle, Spring 2004 (Talks by Gordon Ritter) What is Non-Euclidean Geometry? Most geometries on the plane R 2 are non-euclidean. Let s denote arc length. Then Euclidean geometry arises from the
DEFINITION 5.1.1 A complex number is a matrix of the form. x y. , y x
 Chapter 5 COMPLEX NUMBERS 5.1 Constructing the complex numbers One way of introducing the field C of complex numbers is via the arithmetic of matrices. DEFINITION 5.1.1 A complex number is a matrix of
Chapter 5 COMPLEX NUMBERS 5.1 Constructing the complex numbers One way of introducing the field C of complex numbers is via the arithmetic of matrices. DEFINITION 5.1.1 A complex number is a matrix of
ON CERTAIN DOUBLY INFINITE SYSTEMS OF CURVES ON A SURFACE
 i93 c J SYSTEMS OF CURVES 695 ON CERTAIN DOUBLY INFINITE SYSTEMS OF CURVES ON A SURFACE BY C H. ROWE. Introduction. A system of co 2 curves having been given on a surface, let us consider a variable curvilinear
i93 c J SYSTEMS OF CURVES 695 ON CERTAIN DOUBLY INFINITE SYSTEMS OF CURVES ON A SURFACE BY C H. ROWE. Introduction. A system of co 2 curves having been given on a surface, let us consider a variable curvilinear
AB2.5: Surfaces and Surface Integrals. Divergence Theorem of Gauss
 AB2.5: urfaces and urface Integrals. Divergence heorem of Gauss epresentations of surfaces or epresentation of a surface as projections on the xy- and xz-planes, etc. are For example, z = f(x, y), x =
AB2.5: urfaces and urface Integrals. Divergence heorem of Gauss epresentations of surfaces or epresentation of a surface as projections on the xy- and xz-planes, etc. are For example, z = f(x, y), x =
TOPIC 4: DERIVATIVES
 TOPIC 4: DERIVATIVES 1. The derivative of a function. Differentiation rules 1.1. The slope of a curve. The slope of a curve at a point P is a measure of the steepness of the curve. If Q is a point on the
TOPIC 4: DERIVATIVES 1. The derivative of a function. Differentiation rules 1.1. The slope of a curve. The slope of a curve at a point P is a measure of the steepness of the curve. If Q is a point on the
Introduction to Topology
 Introduction to Topology Tomoo Matsumura November 30, 2010 Contents 1 Topological spaces 3 1.1 Basis of a Topology......................................... 3 1.2 Comparing Topologies.......................................
Introduction to Topology Tomoo Matsumura November 30, 2010 Contents 1 Topological spaces 3 1.1 Basis of a Topology......................................... 3 1.2 Comparing Topologies.......................................
Solving Simultaneous Equations and Matrices
 Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
39 Symmetry of Plane Figures
 39 Symmetry of Plane Figures In this section, we are interested in the symmetric properties of plane figures. By a symmetry of a plane figure we mean a motion of the plane that moves the figure so that
39 Symmetry of Plane Figures In this section, we are interested in the symmetric properties of plane figures. By a symmetry of a plane figure we mean a motion of the plane that moves the figure so that
Classification and Structure of Periodic Fatou Components
 Classification and Structure of Periodic Fatou Components Senior Honors Thesis in Mathematics, Harvard College By Benjamin Dozier Adviser: Sarah Koch 3/19/2012 Abstract For a given rational map f : Ĉ Ĉ,
Classification and Structure of Periodic Fatou Components Senior Honors Thesis in Mathematics, Harvard College By Benjamin Dozier Adviser: Sarah Koch 3/19/2012 Abstract For a given rational map f : Ĉ Ĉ,
Numerical Analysis Lecture Notes
 Numerical Analysis Lecture Notes Peter J. Olver 5. Inner Products and Norms The norm of a vector is a measure of its size. Besides the familiar Euclidean norm based on the dot product, there are a number
Numerical Analysis Lecture Notes Peter J. Olver 5. Inner Products and Norms The norm of a vector is a measure of its size. Besides the familiar Euclidean norm based on the dot product, there are a number
Geometric Transformations
 Geometric Transformations Definitions Def: f is a mapping (function) of a set A into a set B if for every element a of A there exists a unique element b of B that is paired with a; this pairing is denoted
Geometric Transformations Definitions Def: f is a mapping (function) of a set A into a set B if for every element a of A there exists a unique element b of B that is paired with a; this pairing is denoted
Lecture 4 DISCRETE SUBGROUPS OF THE ISOMETRY GROUP OF THE PLANE AND TILINGS
 1 Lecture 4 DISCRETE SUBGROUPS OF THE ISOMETRY GROUP OF THE PLANE AND TILINGS This lecture, just as the previous one, deals with a classification of objects, the original interest in which was perhaps
1 Lecture 4 DISCRETE SUBGROUPS OF THE ISOMETRY GROUP OF THE PLANE AND TILINGS This lecture, just as the previous one, deals with a classification of objects, the original interest in which was perhaps
88 CHAPTER 2. VECTOR FUNCTIONS. . First, we need to compute T (s). a By definition, r (s) T (s) = 1 a sin s a. sin s a, cos s a
. a By definition, r (s) T (s) = 1 a sin s a. sin s a, cos s a") 88 CHAPTER. VECTOR FUNCTIONS.4 Curvature.4.1 Definitions and Examples The notion of curvature measures how sharply a curve bends. We would expect the curvature to be 0 for a straight line, to be very small
88 CHAPTER. VECTOR FUNCTIONS.4 Curvature.4.1 Definitions and Examples The notion of curvature measures how sharply a curve bends. We would expect the curvature to be 0 for a straight line, to be very small
Selected practice exam solutions (part 5, item 2) (MAT 360)
 (MAT 360)") Selected practice exam solutions (part 5, item ) (MAT 360) Harder 8,91,9,94(smaller should be replaced by greater )95,103,109,140,160,(178,179,180,181 this is really one problem),188,193,194,195 8. On
Selected practice exam solutions (part 5, item ) (MAT 360) Harder 8,91,9,94(smaller should be replaced by greater )95,103,109,140,160,(178,179,180,181 this is really one problem),188,193,194,195 8. On
Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain
 92.222 - Linear Algebra II - Spring 2004 by D. Klain") Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain 1. Orthogonal matrices and orthonormal sets An n n real-valued matrix A is said to be an orthogonal
Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain 1. Orthogonal matrices and orthonormal sets An n n real-valued matrix A is said to be an orthogonal
Why do mathematicians make things so complicated?
 Why do mathematicians make things so complicated? Zhiqin Lu, The Math Department March 9, 2010 Introduction What is Mathematics? Introduction What is Mathematics? 24,100,000 answers from Google. Introduction
Why do mathematicians make things so complicated? Zhiqin Lu, The Math Department March 9, 2010 Introduction What is Mathematics? Introduction What is Mathematics? 24,100,000 answers from Google. Introduction
Geometry Course Summary Department: Math. Semester 1
 Geometry Course Summary Department: Math Semester 1 Learning Objective #1 Geometry Basics Targets to Meet Learning Objective #1 Use inductive reasoning to make conclusions about mathematical patterns Give
Geometry Course Summary Department: Math Semester 1 Learning Objective #1 Geometry Basics Targets to Meet Learning Objective #1 Use inductive reasoning to make conclusions about mathematical patterns Give
Master of Arts in Mathematics
 Master of Arts in Mathematics Administrative Unit The program is administered by the Office of Graduate Studies and Research through the Faculty of Mathematics and Mathematics Education, Department of
Master of Arts in Mathematics Administrative Unit The program is administered by the Office of Graduate Studies and Research through the Faculty of Mathematics and Mathematics Education, Department of
Chapter 17. Orthogonal Matrices and Symmetries of Space
 Chapter 17. Orthogonal Matrices and Symmetries of Space Take a random matrix, say 1 3 A = 4 5 6, 7 8 9 and compare the lengths of e 1 and Ae 1. The vector e 1 has length 1, while Ae 1 = (1, 4, 7) has length
Chapter 17. Orthogonal Matrices and Symmetries of Space Take a random matrix, say 1 3 A = 4 5 6, 7 8 9 and compare the lengths of e 1 and Ae 1. The vector e 1 has length 1, while Ae 1 = (1, 4, 7) has length
A QUICK GUIDE TO THE FORMULAS OF MULTIVARIABLE CALCULUS
 A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
THE HELICOIDAL SURFACES AS BONNET SURFACES
 Tδhoku Math. J. 40(1988) 485-490. THE HELICOIDAL SURFACES AS BONNET SURFACES loannis M. ROUSSOS (Received May 11 1987) 1. Introduction. In this paper we deal with the following question: which surfaces
Tδhoku Math. J. 40(1988) 485-490. THE HELICOIDAL SURFACES AS BONNET SURFACES loannis M. ROUSSOS (Received May 11 1987) 1. Introduction. In this paper we deal with the following question: which surfaces
Mathematics Course 111: Algebra I Part IV: Vector Spaces
 Mathematics Course 111: Algebra I Part IV: Vector Spaces D. R. Wilkins Academic Year 1996-7 9 Vector Spaces A vector space over some field K is an algebraic structure consisting of a set V on which are
Mathematics Course 111: Algebra I Part IV: Vector Spaces D. R. Wilkins Academic Year 1996-7 9 Vector Spaces A vector space over some field K is an algebraic structure consisting of a set V on which are
Math 241, Exam 1 Information.
 Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Complex Function Theory. Second Edition. Donald Sarason >AMS AMERICAN MATHEMATICAL SOCIETY
 Complex Function Theory Second Edition Donald Sarason >AMS AMERICAN MATHEMATICAL SOCIETY Contents Preface to the Second Edition Preface to the First Edition ix xi Chapter I. Complex Numbers 1 1.1. Definition
Complex Function Theory Second Edition Donald Sarason >AMS AMERICAN MATHEMATICAL SOCIETY Contents Preface to the Second Edition Preface to the First Edition ix xi Chapter I. Complex Numbers 1 1.1. Definition
Computer Graphics. Geometric Modeling. Page 1. Copyright Gotsman, Elber, Barequet, Karni, Sheffer Computer Science - Technion. An Example.
 An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
Algebra 2 Chapter 1 Vocabulary. identity - A statement that equates two equivalent expressions.
 Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
UNIFORMLY DISCONTINUOUS GROUPS OF ISOMETRIES OF THE PLANE
 UNIFORMLY DISCONTINUOUS GROUPS OF ISOMETRIES OF THE PLANE NINA LEUNG Abstract. This paper discusses 2-dimensional locally Euclidean geometries and how these geometries can describe musical chords. Contents
UNIFORMLY DISCONTINUOUS GROUPS OF ISOMETRIES OF THE PLANE NINA LEUNG Abstract. This paper discusses 2-dimensional locally Euclidean geometries and how these geometries can describe musical chords. Contents
APPLICATIONS OF TENSOR ANALYSIS
 APPLICATIONS OF TENSOR ANALYSIS (formerly titled: Applications of the Absolute Differential Calculus) by A J McCONNELL Dover Publications, Inc, Neiv York CONTENTS PART I ALGEBRAIC PRELIMINARIES/ CHAPTER
APPLICATIONS OF TENSOR ANALYSIS (formerly titled: Applications of the Absolute Differential Calculus) by A J McCONNELL Dover Publications, Inc, Neiv York CONTENTS PART I ALGEBRAIC PRELIMINARIES/ CHAPTER
Surface Normals and Tangent Planes
 Surface Normals and Tangent Planes Normal and Tangent Planes to Level Surfaces Because the equation of a plane requires a point and a normal vector to the plane, nding the equation of a tangent plane to
Surface Normals and Tangent Planes Normal and Tangent Planes to Level Surfaces Because the equation of a plane requires a point and a normal vector to the plane, nding the equation of a tangent plane to
Exam 1 Sample Question SOLUTIONS. y = 2x
 Exam Sample Question SOLUTIONS. Eliminate the parameter to find a Cartesian equation for the curve: x e t, y e t. SOLUTION: You might look at the coordinates and notice that If you don t see it, we can
Exam Sample Question SOLUTIONS. Eliminate the parameter to find a Cartesian equation for the curve: x e t, y e t. SOLUTION: You might look at the coordinates and notice that If you don t see it, we can
THREE DIMENSIONAL GEOMETRY
 Chapter 8 THREE DIMENSIONAL GEOMETRY 8.1 Introduction In this chapter we present a vector algebra approach to three dimensional geometry. The aim is to present standard properties of lines and planes,
Chapter 8 THREE DIMENSIONAL GEOMETRY 8.1 Introduction In this chapter we present a vector algebra approach to three dimensional geometry. The aim is to present standard properties of lines and planes,
Determine whether the following lines intersect, are parallel, or skew. L 1 : x = 6t y = 1 + 9t z = 3t. x = 1 + 2s y = 4 3s z = s
 Homework Solutions 5/20 10.5.17 Determine whether the following lines intersect, are parallel, or skew. L 1 : L 2 : x = 6t y = 1 + 9t z = 3t x = 1 + 2s y = 4 3s z = s A vector parallel to L 1 is 6, 9,
Homework Solutions 5/20 10.5.17 Determine whether the following lines intersect, are parallel, or skew. L 1 : L 2 : x = 6t y = 1 + 9t z = 3t x = 1 + 2s y = 4 3s z = s A vector parallel to L 1 is 6, 9,
BANACH AND HILBERT SPACE REVIEW
 BANACH AND HILBET SPACE EVIEW CHISTOPHE HEIL These notes will briefly review some basic concepts related to the theory of Banach and Hilbert spaces. We are not trying to give a complete development, but
BANACH AND HILBET SPACE EVIEW CHISTOPHE HEIL These notes will briefly review some basic concepts related to the theory of Banach and Hilbert spaces. We are not trying to give a complete development, but
www.mathsbox.org.uk ab = c a If the coefficients a,b and c are real then either α and β are real or α and β are complex conjugates
 Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
2008 AP Calculus AB Multiple Choice Exam
 008 AP Multiple Choice Eam Name 008 AP Calculus AB Multiple Choice Eam Section No Calculator Active AP Calculus 008 Multiple Choice 008 AP Calculus AB Multiple Choice Eam Section Calculator Active AP Calculus
008 AP Multiple Choice Eam Name 008 AP Calculus AB Multiple Choice Eam Section No Calculator Active AP Calculus 008 Multiple Choice 008 AP Calculus AB Multiple Choice Eam Section Calculator Active AP Calculus
DRAFT. Further mathematics. GCE AS and A level subject content
 Further mathematics GCE AS and A level subject content July 2014 s Introduction Purpose Aims and objectives Subject content Structure Background knowledge Overarching themes Use of technology Detailed
Further mathematics GCE AS and A level subject content July 2014 s Introduction Purpose Aims and objectives Subject content Structure Background knowledge Overarching themes Use of technology Detailed
Derive 5: The Easiest... Just Got Better!
 Liverpool John Moores University, 1-15 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de Technologie Supérieure, Canada Email; mbeaudin@seg.etsmtl.ca 1. Introduction Engineering
Liverpool John Moores University, 1-15 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de Technologie Supérieure, Canada Email; mbeaudin@seg.etsmtl.ca 1. Introduction Engineering
42 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE. Figure 1.18: Parabola y = 2x 2. 1.6.1 Brief review of Conic Sections
 2 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.18: Parabola y = 2 1.6 Quadric Surfaces 1.6.1 Brief review of Conic Sections You may need to review conic sections for this to make more sense. You
2 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.18: Parabola y = 2 1.6 Quadric Surfaces 1.6.1 Brief review of Conic Sections You may need to review conic sections for this to make more sense. You
MICROLOCAL ANALYSIS OF THE BOCHNER-MARTINELLI INTEGRAL
 PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 00, Number 0, Pages 000 000 S 0002-9939(XX)0000-0 MICROLOCAL ANALYSIS OF THE BOCHNER-MARTINELLI INTEGRAL NIKOLAI TARKHANOV AND NIKOLAI VASILEVSKI
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 00, Number 0, Pages 000 000 S 0002-9939(XX)0000-0 MICROLOCAL ANALYSIS OF THE BOCHNER-MARTINELLI INTEGRAL NIKOLAI TARKHANOV AND NIKOLAI VASILEVSKI
Introduction to Algebraic Geometry. Bézout s Theorem and Inflection Points
 Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
SHINPEI BABA AND SUBHOJOY GUPTA
 HOLONOMY MAP FIBERS OF CP 1 -STRUCTURES IN MODULI SPACE SHINPEI BABA AND SUBHOJOY GUPTA Abstract. Let S be a closed oriented surface of genus g 2. Fix an arbitrary non-elementary representation ρ: π 1
HOLONOMY MAP FIBERS OF CP 1 -STRUCTURES IN MODULI SPACE SHINPEI BABA AND SUBHOJOY GUPTA Abstract. Let S be a closed oriented surface of genus g 2. Fix an arbitrary non-elementary representation ρ: π 1
Angles that are between parallel lines, but on opposite sides of a transversal.
 GLOSSARY Appendix A Appendix A: Glossary Acute Angle An angle that measures less than 90. Acute Triangle Alternate Angles A triangle that has three acute angles. Angles that are between parallel lines,
GLOSSARY Appendix A Appendix A: Glossary Acute Angle An angle that measures less than 90. Acute Triangle Alternate Angles A triangle that has three acute angles. Angles that are between parallel lines,
The Fourth International DERIVE-TI92/89 Conference Liverpool, U.K., 12-15 July 2000. Derive 5: The Easiest... Just Got Better!
 The Fourth International DERIVE-TI9/89 Conference Liverpool, U.K., -5 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de technologie supérieure 00, rue Notre-Dame Ouest Montréal
The Fourth International DERIVE-TI9/89 Conference Liverpool, U.K., -5 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de technologie supérieure 00, rue Notre-Dame Ouest Montréal
4. Complex integration: Cauchy integral theorem and Cauchy integral formulas. Definite integral of a complex-valued function of a real variable
 4. Complex integration: Cauchy integral theorem and Cauchy integral formulas Definite integral of a complex-valued function of a real variable Consider a complex valued function f(t) of a real variable
4. Complex integration: Cauchy integral theorem and Cauchy integral formulas Definite integral of a complex-valued function of a real variable Consider a complex valued function f(t) of a real variable
Lecture L22-2D Rigid Body Dynamics: Work and Energy
 J. Peraire, S. Widnall 6.07 Dynamics Fall 008 Version.0 Lecture L - D Rigid Body Dynamics: Work and Energy In this lecture, we will revisit the principle of work and energy introduced in lecture L-3 for
J. Peraire, S. Widnall 6.07 Dynamics Fall 008 Version.0 Lecture L - D Rigid Body Dynamics: Work and Energy In this lecture, we will revisit the principle of work and energy introduced in lecture L-3 for
Differentiation of vectors
 Chapter 4 Differentiation of vectors 4.1 Vector-valued functions In the previous chapters we have considered real functions of several (usually two) variables f : D R, where D is a subset of R n, where
Chapter 4 Differentiation of vectors 4.1 Vector-valued functions In the previous chapters we have considered real functions of several (usually two) variables f : D R, where D is a subset of R n, where
Understanding Basic Calculus
 Understanding Basic Calculus S.K. Chung Dedicated to all the people who have helped me in my life. i Preface This book is a revised and expanded version of the lecture notes for Basic Calculus and other
Understanding Basic Calculus S.K. Chung Dedicated to all the people who have helped me in my life. i Preface This book is a revised and expanded version of the lecture notes for Basic Calculus and other
Geometry of Vectors. 1 Cartesian Coordinates. Carlo Tomasi
 Geometry of Vectors Carlo Tomasi This note explores the geometric meaning of norm, inner product, orthogonality, and projection for vectors. For vectors in three-dimensional space, we also examine the
Geometry of Vectors Carlo Tomasi This note explores the geometric meaning of norm, inner product, orthogonality, and projection for vectors. For vectors in three-dimensional space, we also examine the
How To Know The Limit Set Of A Fuchsian Group On A Boundary Of A Hyperbolic Plane
 Reading material on the limit set of a Fuchsian group Recommended texts Many books on hyperbolic geometry and Kleinian and Fuchsian groups contain material about limit sets. The presentation given here
Reading material on the limit set of a Fuchsian group Recommended texts Many books on hyperbolic geometry and Kleinian and Fuchsian groups contain material about limit sets. The presentation given here
Copyrighted Material. Chapter 1 DEGREE OF A CURVE
 Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
The Quantum Harmonic Oscillator Stephen Webb
 The Quantum Harmonic Oscillator Stephen Webb The Importance of the Harmonic Oscillator The quantum harmonic oscillator holds a unique importance in quantum mechanics, as it is both one of the few problems
The Quantum Harmonic Oscillator Stephen Webb The Importance of the Harmonic Oscillator The quantum harmonic oscillator holds a unique importance in quantum mechanics, as it is both one of the few problems
1 CHAPTER 18 THE CATENARY. 18.1 Introduction
 1 CHAPER 18 HE CAENARY 18.1 Introduction If a flexible chain or rope is loosely hung between two fixed points, it hangs in a curve that looks a little like a parabola, but in fact is not quite a parabola;
1 CHAPER 18 HE CAENARY 18.1 Introduction If a flexible chain or rope is loosely hung between two fixed points, it hangs in a curve that looks a little like a parabola, but in fact is not quite a parabola;
Extrinsic geometric flows
 On joint work with Vladimir Rovenski from Haifa Paweł Walczak Uniwersytet Łódzki CRM, Bellaterra, July 16, 2010 Setting Throughout this talk: (M, F, g 0 ) is a (compact, complete, any) foliated, Riemannian
On joint work with Vladimir Rovenski from Haifa Paweł Walczak Uniwersytet Łódzki CRM, Bellaterra, July 16, 2010 Setting Throughout this talk: (M, F, g 0 ) is a (compact, complete, any) foliated, Riemannian
1 2 3 1 1 2 x = + x 2 + x 4 1 0 1
 (d) If the vector b is the sum of the four columns of A, write down the complete solution to Ax = b. 1 2 3 1 1 2 x = + x 2 + x 4 1 0 0 1 0 1 2. (11 points) This problem finds the curve y = C + D 2 t which
(d) If the vector b is the sum of the four columns of A, write down the complete solution to Ax = b. 1 2 3 1 1 2 x = + x 2 + x 4 1 0 0 1 0 1 2. (11 points) This problem finds the curve y = C + D 2 t which
Tennessee Mathematics Standards 2009-2010 Implementation. Grade Six Mathematics. Standard 1 Mathematical Processes
 Tennessee Mathematics Standards 2009-2010 Implementation Grade Six Mathematics Standard 1 Mathematical Processes GLE 0606.1.1 Use mathematical language, symbols, and definitions while developing mathematical
Tennessee Mathematics Standards 2009-2010 Implementation Grade Six Mathematics Standard 1 Mathematical Processes GLE 0606.1.1 Use mathematical language, symbols, and definitions while developing mathematical
Introduction to Graph Theory
 Introduction to Graph Theory Allen Dickson October 2006 1 The Königsberg Bridge Problem The city of Königsberg was located on the Pregel river in Prussia. The river divided the city into four separate
Introduction to Graph Theory Allen Dickson October 2006 1 The Königsberg Bridge Problem The city of Königsberg was located on the Pregel river in Prussia. The river divided the city into four separate
Lecture 14: Section 3.3
 Lecture 14: Section 3.3 Shuanglin Shao October 23, 2013 Definition. Two nonzero vectors u and v in R n are said to be orthogonal (or perpendicular) if u v = 0. We will also agree that the zero vector in
Lecture 14: Section 3.3 Shuanglin Shao October 23, 2013 Definition. Two nonzero vectors u and v in R n are said to be orthogonal (or perpendicular) if u v = 0. We will also agree that the zero vector in
Geometry: Unit 1 Vocabulary TERM DEFINITION GEOMETRIC FIGURE. Cannot be defined by using other figures.
 Geometry: Unit 1 Vocabulary 1.1 Undefined terms Cannot be defined by using other figures. Point A specific location. It has no dimension and is represented by a dot. Line Plane A connected straight path.
Geometry: Unit 1 Vocabulary 1.1 Undefined terms Cannot be defined by using other figures. Point A specific location. It has no dimension and is represented by a dot. Line Plane A connected straight path.
Projective Geometry: A Short Introduction. Lecture Notes Edmond Boyer
 Projective Geometry: A Short Introduction Lecture Notes Edmond Boyer Contents 1 Introduction 2 11 Objective 2 12 Historical Background 3 13 Bibliography 4 2 Projective Spaces 5 21 Definitions 5 22 Properties
Projective Geometry: A Short Introduction Lecture Notes Edmond Boyer Contents 1 Introduction 2 11 Objective 2 12 Historical Background 3 13 Bibliography 4 2 Projective Spaces 5 21 Definitions 5 22 Properties
UNIVERSITY GRADUATE STUDIES PROGRAM SILLIMAN UNIVERSITY DUMAGUETE CITY. Master of Science in Mathematics
 1 UNIVERSITY GRADUATE STUDIES PROGRAM SILLIMAN UNIVERSITY DUMAGUETE CITY Master of Science in Mathematics Introduction The Master of Science in Mathematics (MS Math) program is intended for students who
1 UNIVERSITY GRADUATE STUDIES PROGRAM SILLIMAN UNIVERSITY DUMAGUETE CITY Master of Science in Mathematics Introduction The Master of Science in Mathematics (MS Math) program is intended for students who
5.3 The Cross Product in R 3
 53 The Cross Product in R 3 Definition 531 Let u = [u 1, u 2, u 3 ] and v = [v 1, v 2, v 3 ] Then the vector given by [u 2 v 3 u 3 v 2, u 3 v 1 u 1 v 3, u 1 v 2 u 2 v 1 ] is called the cross product (or
53 The Cross Product in R 3 Definition 531 Let u = [u 1, u 2, u 3 ] and v = [v 1, v 2, v 3 ] Then the vector given by [u 2 v 3 u 3 v 2, u 3 v 1 u 1 v 3, u 1 v 2 u 2 v 1 ] is called the cross product (or
Mean Value Coordinates
 Mean Value Coordinates Michael S. Floater Abstract: We derive a generalization of barycentric coordinates which allows a vertex in a planar triangulation to be expressed as a convex combination of its
Mean Value Coordinates Michael S. Floater Abstract: We derive a generalization of barycentric coordinates which allows a vertex in a planar triangulation to be expressed as a convex combination of its
Classification of Cartan matrices
 Chapter 7 Classification of Cartan matrices In this chapter we describe a classification of generalised Cartan matrices This classification can be compared as the rough classification of varieties in terms
Chapter 7 Classification of Cartan matrices In this chapter we describe a classification of generalised Cartan matrices This classification can be compared as the rough classification of varieties in terms
Fundamental Theorems of Vector Calculus
 Fundamental Theorems of Vector Calculus We have studied the techniques for evaluating integrals over curves and surfaces. In the case of integrating over an interval on the real line, we were able to use
Fundamental Theorems of Vector Calculus We have studied the techniques for evaluating integrals over curves and surfaces. In the case of integrating over an interval on the real line, we were able to use
Critically Periodic Cubic Polynomials
 Critically Periodic Cubic Polynomials John Milnor Stony Brook University (www.math.sunysb.edu) IN MEMORY OF ADRIEN DOUADY Paris, May 26 2008 Parameter Space 1. THE PROBLEM: To study cubic polynomial maps
Critically Periodic Cubic Polynomials John Milnor Stony Brook University (www.math.sunysb.edu) IN MEMORY OF ADRIEN DOUADY Paris, May 26 2008 Parameter Space 1. THE PROBLEM: To study cubic polynomial maps
Physics 25 Exam 3 November 3, 2009
 1. A long, straight wire carries a current I. If the magnetic field at a distance d from the wire has magnitude B, what would be the the magnitude of the magnetic field at a distance d/3 from the wire,
1. A long, straight wire carries a current I. If the magnetic field at a distance d from the wire has magnitude B, what would be the the magnitude of the magnetic field at a distance d/3 from the wire,
Lecture L6 - Intrinsic Coordinates
 S. Widnall, J. Peraire 16.07 Dynamics Fall 2009 Version 2.0 Lecture L6 - Intrinsic Coordinates In lecture L4, we introduced the position, velocity and acceleration vectors and referred them to a fixed
S. Widnall, J. Peraire 16.07 Dynamics Fall 2009 Version 2.0 Lecture L6 - Intrinsic Coordinates In lecture L4, we introduced the position, velocity and acceleration vectors and referred them to a fixed
Mean value theorem, Taylors Theorem, Maxima and Minima.
 MA 001 Preparatory Mathematics I. Complex numbers as ordered pairs. Argand s diagram. Triangle inequality. De Moivre s Theorem. Algebra: Quadratic equations and express-ions. Permutations and Combinations.
MA 001 Preparatory Mathematics I. Complex numbers as ordered pairs. Argand s diagram. Triangle inequality. De Moivre s Theorem. Algebra: Quadratic equations and express-ions. Permutations and Combinations.
Solutions to Practice Problems for Test 4
 olutions to Practice Problems for Test 4 1. Let be the line segmentfrom the point (, 1, 1) to the point (,, 3). Evaluate the line integral y ds. Answer: First, we parametrize the line segment from (, 1,
olutions to Practice Problems for Test 4 1. Let be the line segmentfrom the point (, 1, 1) to the point (,, 3). Evaluate the line integral y ds. Answer: First, we parametrize the line segment from (, 1,
Bicycle Math. presented to the Math, Computer Science, & Physics Seminar Bard College Annandale-on-Hudson, New York. Timothy E.
 Bicycle Math presented to the Math, Computer Science, & Physics Seminar Bard College Annandale-on-Hudson, New York Timothy E. Goldberg Cornell University Ithaca, New York April 1, 2010 Abstract We report
Bicycle Math presented to the Math, Computer Science, & Physics Seminar Bard College Annandale-on-Hudson, New York Timothy E. Goldberg Cornell University Ithaca, New York April 1, 2010 Abstract We report
ISOMETRIES OF R n KEITH CONRAD
 ISOMETRIES OF R n KEITH CONRAD 1. Introduction An isometry of R n is a function h: R n R n that preserves the distance between vectors: h(v) h(w) = v w for all v and w in R n, where (x 1,..., x n ) = x
ISOMETRIES OF R n KEITH CONRAD 1. Introduction An isometry of R n is a function h: R n R n that preserves the distance between vectors: h(v) h(w) = v w for all v and w in R n, where (x 1,..., x n ) = x
COMPLEX NUMBERS. a bi c di a c b d i. a bi c di a c b d i For instance, 1 i 4 7i 1 4 1 7 i 5 6i
 COMPLEX NUMBERS _4+i _-i FIGURE Complex numbers as points in the Arg plane i _i +i -i A complex number can be represented by an expression of the form a bi, where a b are real numbers i is a symbol with
COMPLEX NUMBERS _4+i _-i FIGURE Complex numbers as points in the Arg plane i _i +i -i A complex number can be represented by an expression of the form a bi, where a b are real numbers i is a symbol with
Figure 2.1: Center of mass of four points.
 Chapter 2 Bézier curves are named after their inventor, Dr. Pierre Bézier. Bézier was an engineer with the Renault car company and set out in the early 196 s to develop a curve formulation which would
Chapter 2 Bézier curves are named after their inventor, Dr. Pierre Bézier. Bézier was an engineer with the Renault car company and set out in the early 196 s to develop a curve formulation which would
Equations Involving Lines and Planes Standard equations for lines in space
 Equations Involving Lines and Planes In this section we will collect various important formulas regarding equations of lines and planes in three dimensional space Reminder regarding notation: any quantity
Equations Involving Lines and Planes In this section we will collect various important formulas regarding equations of lines and planes in three dimensional space Reminder regarding notation: any quantity
Invariant Metrics with Nonnegative Curvature on Compact Lie Groups
 Canad. Math. Bull. Vol. 50 (1), 2007 pp. 24 34 Invariant Metrics with Nonnegative Curvature on Compact Lie Groups Nathan Brown, Rachel Finck, Matthew Spencer, Kristopher Tapp and Zhongtao Wu Abstract.
Canad. Math. Bull. Vol. 50 (1), 2007 pp. 24 34 Invariant Metrics with Nonnegative Curvature on Compact Lie Groups Nathan Brown, Rachel Finck, Matthew Spencer, Kristopher Tapp and Zhongtao Wu Abstract.
Solutions to Math 51 First Exam January 29, 2015
 Solutions to Math 5 First Exam January 29, 25. ( points) (a) Complete the following sentence: A set of vectors {v,..., v k } is defined to be linearly dependent if (2 points) there exist c,... c k R, not
Solutions to Math 5 First Exam January 29, 25. ( points) (a) Complete the following sentence: A set of vectors {v,..., v k } is defined to be linearly dependent if (2 points) there exist c,... c k R, not
MATH 52: MATLAB HOMEWORK 2
 MATH 52: MATLAB HOMEWORK 2. omplex Numbers The prevalence of the complex numbers throughout the scientific world today belies their long and rocky history. Much like the negative numbers, complex numbers
MATH 52: MATLAB HOMEWORK 2. omplex Numbers The prevalence of the complex numbers throughout the scientific world today belies their long and rocky history. Much like the negative numbers, complex numbers
Method of Green s Functions
 Method of Green s Functions 8.303 Linear Partial ifferential Equations Matthew J. Hancock Fall 006 We introduce another powerful method of solving PEs. First, we need to consider some preliminary definitions
Method of Green s Functions 8.303 Linear Partial ifferential Equations Matthew J. Hancock Fall 006 We introduce another powerful method of solving PEs. First, we need to consider some preliminary definitions
Situation: Proving Quadrilaterals in the Coordinate Plane
 Situation: Proving Quadrilaterals in the Coordinate Plane 1 Prepared at the University of Georgia EMAT 6500 Date Last Revised: 07/31/013 Michael Ferra Prompt A teacher in a high school Coordinate Algebra
Situation: Proving Quadrilaterals in the Coordinate Plane 1 Prepared at the University of Georgia EMAT 6500 Date Last Revised: 07/31/013 Michael Ferra Prompt A teacher in a high school Coordinate Algebra
CIRCLE COORDINATE GEOMETRY
 CIRCLE COORDINATE GEOMETRY (EXAM QUESTIONS) Question 1 (**) A circle has equation x + y = 2x + 8 Determine the radius and the coordinates of the centre of the circle. r = 3, ( 1,0 ) Question 2 (**) A circle
CIRCLE COORDINATE GEOMETRY (EXAM QUESTIONS) Question 1 (**) A circle has equation x + y = 2x + 8 Determine the radius and the coordinates of the centre of the circle. r = 3, ( 1,0 ) Question 2 (**) A circle
MATH1231 Algebra, 2015 Chapter 7: Linear maps
 MATH1231 Algebra, 2015 Chapter 7: Linear maps A/Prof. Daniel Chan School of Mathematics and Statistics University of New South Wales danielc@unsw.edu.au Daniel Chan (UNSW) MATH1231 Algebra 1 / 43 Chapter
MATH1231 Algebra, 2015 Chapter 7: Linear maps A/Prof. Daniel Chan School of Mathematics and Statistics University of New South Wales danielc@unsw.edu.au Daniel Chan (UNSW) MATH1231 Algebra 1 / 43 Chapter
The Essentials of CAGD
 The Essentials of CAGD Chapter 2: Lines and Planes Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford
The Essentials of CAGD Chapter 2: Lines and Planes Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford