Critically Periodic Cubic Polynomials
|
|
|
- Cameron Harrison
- 7 years ago
- Views:
Transcription
1 Critically Periodic Cubic Polynomials John Milnor Stony Brook University ( IN MEMORY OF ADRIEN DOUADY Paris, May
 IN MEMORY OF ADRIEN DOUADY")
2 Parameter Space 1. THE PROBLEM: To study cubic polynomial maps F with a marked critical point which is periodic under F. work in progress with Araceli Bonifant Any cubic polynomial map with marked critical point is affinely conjugate to one of the form F(z) = F a,v (z) = z 3 3a 2 z + (2a 3 + v). Here a is the marked critical point, F (a) = v is the marked critical value, a is the free critical point. The set of all such maps F = F a,v will be identified with the parameter space, consisting of all pairs (a, v) C 2.
 = v is the marked critical value, a is the free critical point.")
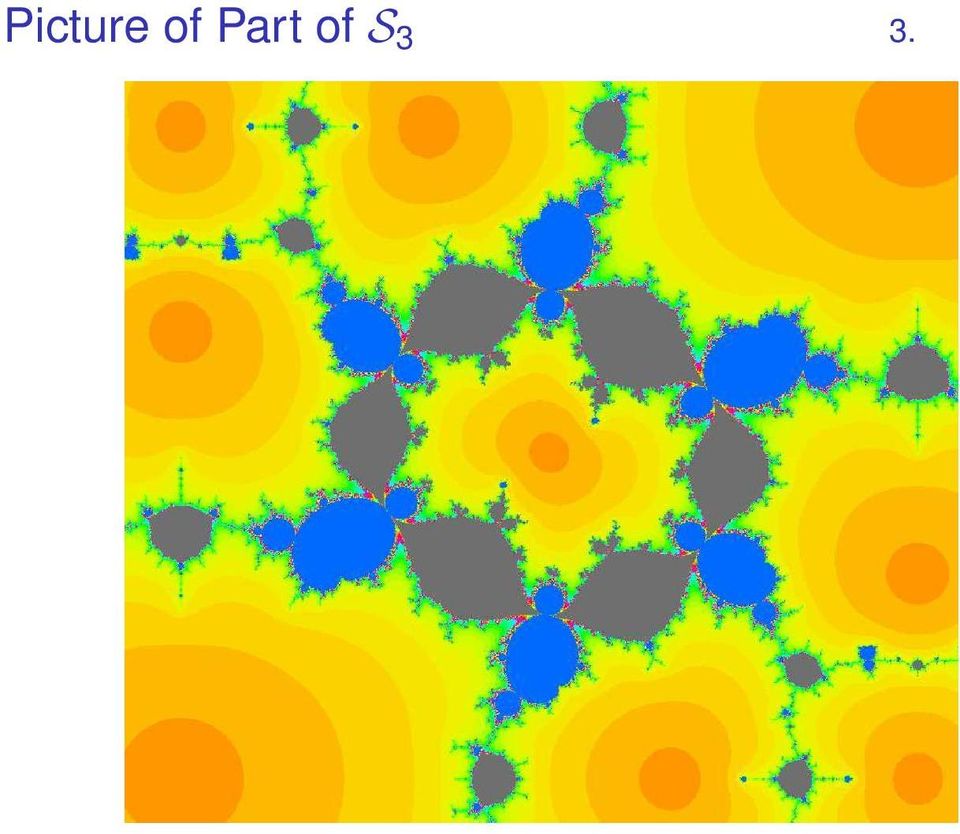
3 The Period p Curve 2. Definition: the period p curve S p C 2, consists of all maps F = F a, v such that the marked critical point a has period exactly p. Assertion. S p is a smooth affine curve in C 2. Complication: The genus of S p increases rapidly with p. S 1 has genus zero with one puncture ( = C), S 2 has genus zero with two punctures, S 3 has genus one with 8 punctures, S 4 has genus 15 with 20 punctures, We can simplify a little by passing to to the moduli space S p /I of holomorphic conjugacy classes. Here I is the involution F(z) F( z), so that F a,v F a, v. The genus of S p /I is smaller, but still increases with p.
 F( z), so that F a,v F a, v.")
4 Picture of Part of S 3 3.


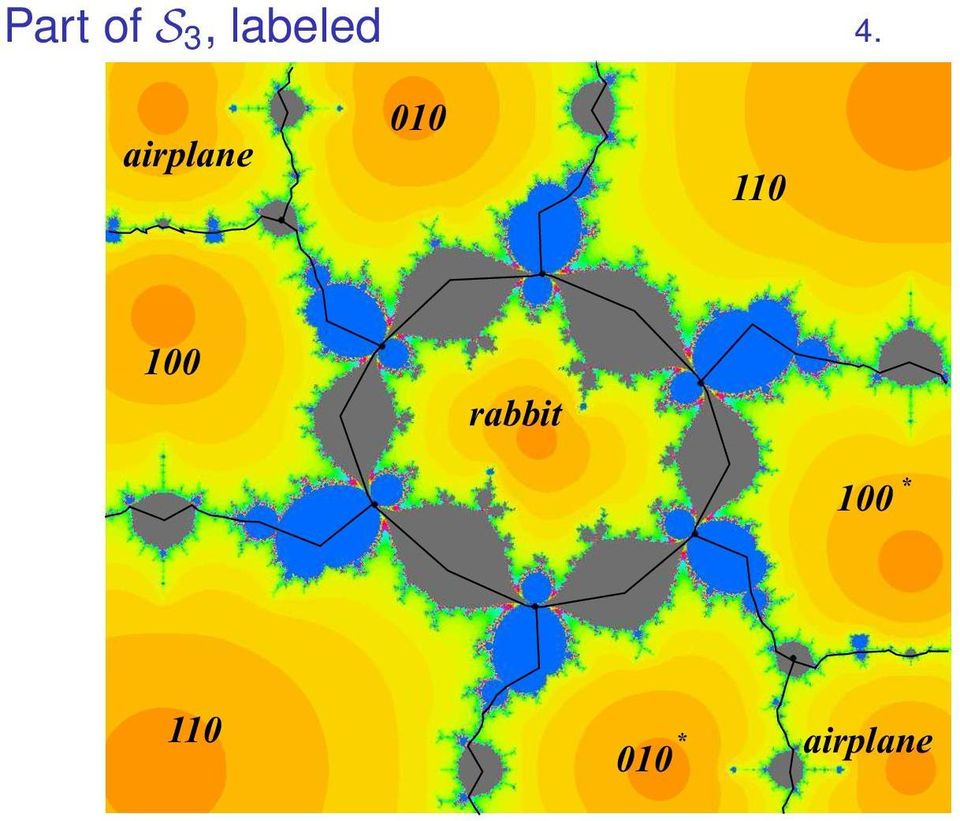
5 Part of S 3, labeled 4.
6 A Cell Structure in S p. 5. Let S p be the smooth compact surface obtained from S p by filling in each puncture point. Conjecture. There is a canonical cell subdivision of each S p. For p 2, the 1-skeleton can be identified with the union of all simple closed regulated curves. Sketch of a regulated curve:

7 Escape Regions 6. Let C(S p ) be the connectedness locus in S p. Each connected component E of the complement S p C(S p ) will be called an escape region in S p. Theorem. For each E, there is a canonical covering map E C D. The degree of this covering map will be called the multiplicity µ 1 of the escape region. We can talk about equipotentials and parameter rays in each escape region. Notation: A parameter ray in the escape region E will be denoted by R E (t). Here t R/µZ. If µ > 1, then t will be called a generalized angle.

8 The Dynamic Plane for a map F E. 7. t-1/3 t 2a a -a -2a t+1/3 For F in the escape region E, the equipotential through 2a and a is a figure eight curve. Here 2a is the free cocritical point, with F(2a) = F( a). The Böttcher coordinate β(2a) C D of the escaping cocritical point is well defined, and the correspondence F β(2a) is the required covering map E C D.
 C D of the escaping cocritical point is well defined, and")
9 The Kneading Sequence. 8. t 2a a t-1/3 U 0 -a U 1 t+1/3 Let U 0 and U 1 be the two bounded regions cut out by the figure eight curve, with a U 0. Any bounded orbit z 1 z 2 determines a sequence σ 1, σ 2,... of zeros and ones with z j U σj. Now take z 1 equal to the marked critical value v = F(a). The associated sequence {σ j } will be called the kneading sequence of the escape region E. Thus -2a F j (a) U σj for j 1.
.")
10 The Associated Quadratic Map. 9. The kneading sequence of any escape region E S p clearly periodic: its period p 1 divides p. is Theorem (Branner and Hubbard). Suppose that F belongs to the escape region E S p. Then the Julia set J(F) consists of countably many copies of a quadratic Julia set J(Q), together with uncountably many single point components. Here the quadratic polynomial Q = Q E is critically periodic of period p 2 where p = p 1 p 2. In other words: Period of marked critical point = (kneading period) (associated quadratic period).


11 Period 2 Examples 10. Here the kneading sequence is 00, and the associated quadratic map is z 2 1 (the basilica ). Kneading sequence 10, with associated quadratic z 2.
.")
12 Canonical Coordinates for S p. 11. Consider the function H p : C 2 C, H p (a, v) = F p a,v(a) a which vanishes everywhere on S p. Think of H p as a complex Hamiltonian function, and consider the Hamiltonian differential equation da = H p dt v, dv = H p dt v. There are holomorphic local solutions t (a, v) = Φ(t). These lie in curves H p = constant, parallel to S p. Those solutions which lie in S p provide a local holomorphic parametrization, unique up to translation of the t-coordinate. Equivalent description: There is a canonical 1-form dt which is well defined and non-zero throughout S p.


13 Part of S 4 in canonical coordinates 12. Double-Basilica Region 1010


14 The 1010 Region: sample Julia set. 13. Kneading sequence 1010, with period p 1 = 2. Q(z) = z 2 1 with critical period p 2 = 2.


 = z 2 1.3107.")
15 Example in the Double-Basilica Region. 14. Kneading sequence 0000, with period p 1 = 1. Q(z) = z with critical period p 2 = 4.
 = z 2 1.3107.")
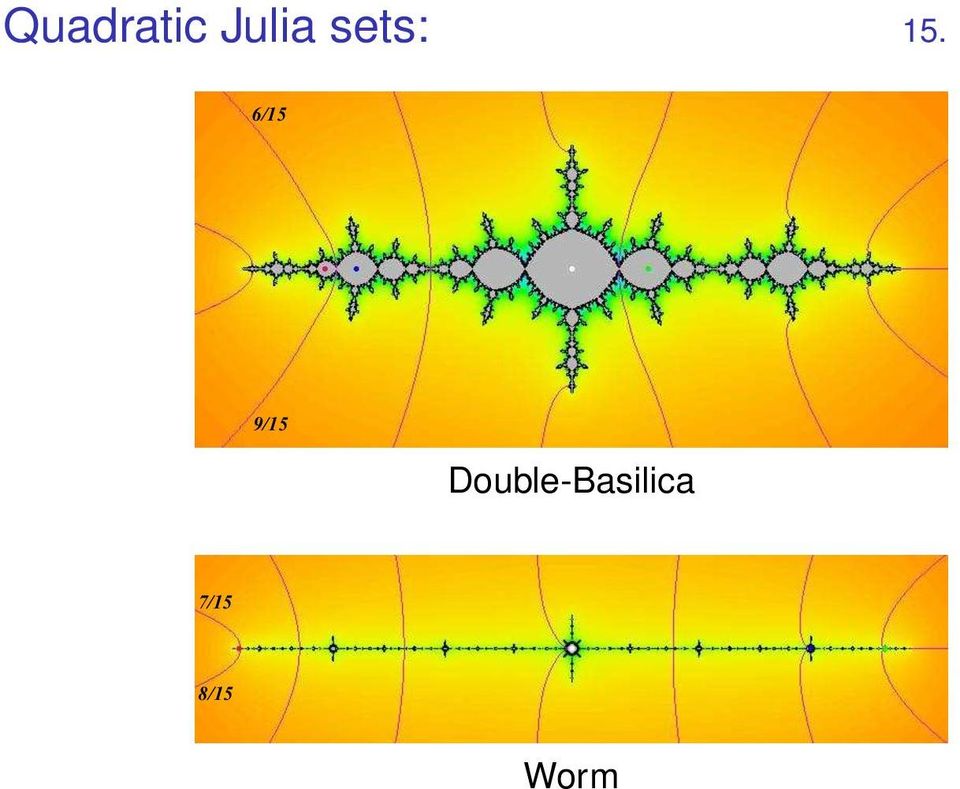
16 Quadratic Julia sets: 15. Double-Basilica Worm
17 Two More Quadratic Julia Sets 16. Kokopelli (1/4)-Rabbit

18 Comparing Rays in the Mandelbrot Set 17. 1/5 1/7 4/15 2/7 H(1/3)

19 Parameter Rays 18. Let E S p be any escape region. Theorem. If the generalized angle t 0 is rational, then the ray R E (t 0 ) lands at a well defined point F 0 in the boundary E. Furthermore, F 0 is either critically finite, or parabolic. Define t Q/Z to be co-periodic if: t ± 1/3 is periodic under angle tripling, 3t is periodic but t is not periodic, t has the form m 3n where m and n are not divisible by 3. Theorem. If t 0 (modz) is co-periodic, then the landing point of R E (t 0 ) is parabolic. We believe that this should be an if and only if statement: t 0 co-periodic the landing point is parabolic.

20 The Period q Decomposition of S p. 19. If t ± 1/3 has period q, we say that t has co-period q. Note that any angle of co-period q can be written as a fraction t = m 3(3 q 1). For example, q = 1 t = m/6, q = 2 t = m/24. Period q decomposition: The collection of all rays of co-period q, together with their landing points, decomposes the parameter curve S p into a finite number of connected open sets U j.


21 Example: The Period 1 Decomposition of S

22 Period 2 Decomposition of S
23 Stability of Periodic Orbits. 22. Let U j be any connected component of S p rays of coperiod q, and let t 0 Q/Z have period q. As F varies over U j, the dynamic ray R F (t 0 ) varies smoothly: Theorem. For each F U j, and each angle t 0 Q/Z of period q, the ray R F (t 0 ) lands at a repelling periodic point z F J(F) C. Furthermore, the correspondence F z F defines a holomorphic function U j C. The pattern of which dynamic rays of period q have a common landing point is the same for all F U j. Corollary. Every parabolic map F 0 S p is the landing point of at least one co-periodic ray.
24 Orbit Portraits for F S 2 (Periods 1 and 2). 23.


25 A Small Mandelbrot Set in S 4 24.
")

26 Detail of J(F 0 ) near 2a / /240
27 Comparing Parameter Space and Julia Set 26. (Empirical Claims) Every Mandelbrot component M S p has a well defined root point F 0, and every parabolic point F 0 S p is the root point of a unique Mandelbrot component M S p. For F M, let r 0 be the root point of the Fatou component U(2a) containing the cocritical point 2a. Then a neighborhood of F 0 in S p is closely related to a neighborhood of r 0 in the dynamic plane for F. More precisely: The two closest parameter rays at F 0 which enclose M have the same angles (modulo Z) as the two closest dynamic rays at r 0 which enclose U(2a). Furthermore, any parameter ray landing at F 0 has the same angle (modulo Z) as some dynamic ray landing at r 0.

28 A Small Mandelbrot Set in S 5 27.

29 Detail of corresponding Julia Set 28.
On the Stability of Julia Sets of Functions having Baker Domains
 On the Stability of Julia Sets of Functions having Baker Domains Dissertation zur Erlangung des Doktorgrades der Mathematische-Naturwissenschaftlichen Fakultäten der Georg-August-Universität Göttingen
On the Stability of Julia Sets of Functions having Baker Domains Dissertation zur Erlangung des Doktorgrades der Mathematische-Naturwissenschaftlichen Fakultäten der Georg-August-Universität Göttingen
α = u v. In other words, Orthogonal Projection
 Orthogonal Projection Given any nonzero vector v, it is possible to decompose an arbitrary vector u into a component that points in the direction of v and one that points in a direction orthogonal to v
Orthogonal Projection Given any nonzero vector v, it is possible to decompose an arbitrary vector u into a component that points in the direction of v and one that points in a direction orthogonal to v
Interplay between polynomial and transcendental entire dynamics
 and Interplay and transcendental Department of Mathematical Sciences, University of Liverpool Oberwolfach, October 2008 Outline and 1 and 2 3 4 Outline and 1 and 2 3 4 Outline and 1 and 2 3 4 Outline and
and Interplay and transcendental Department of Mathematical Sciences, University of Liverpool Oberwolfach, October 2008 Outline and 1 and 2 3 4 Outline and 1 and 2 3 4 Outline and 1 and 2 3 4 Outline and
The degree of a polynomial function is equal to the highest exponent found on the independent variables.
 DETAILED SOLUTIONS AND CONCEPTS - POLYNOMIAL FUNCTIONS Prepared by Ingrid Stewart, Ph.D., College of Southern Nevada Please Send Questions and Comments to ingrid.stewart@csn.edu. Thank you! PLEASE NOTE
DETAILED SOLUTIONS AND CONCEPTS - POLYNOMIAL FUNCTIONS Prepared by Ingrid Stewart, Ph.D., College of Southern Nevada Please Send Questions and Comments to ingrid.stewart@csn.edu. Thank you! PLEASE NOTE
Zeros of a Polynomial Function
 Zeros of a Polynomial Function An important consequence of the Factor Theorem is that finding the zeros of a polynomial is really the same thing as factoring it into linear factors. In this section we
Zeros of a Polynomial Function An important consequence of the Factor Theorem is that finding the zeros of a polynomial is really the same thing as factoring it into linear factors. In this section we
1. Prove that the empty set is a subset of every set.
 1. Prove that the empty set is a subset of every set. Basic Topology Written by Men-Gen Tsai email: b89902089@ntu.edu.tw Proof: For any element x of the empty set, x is also an element of every set since
1. Prove that the empty set is a subset of every set. Basic Topology Written by Men-Gen Tsai email: b89902089@ntu.edu.tw Proof: For any element x of the empty set, x is also an element of every set since
4. Expanding dynamical systems
 4.1. Metric definition. 4. Expanding dynamical systems Definition 4.1. Let X be a compact metric space. A map f : X X is said to be expanding if there exist ɛ > 0 and L > 1 such that d(f(x), f(y)) Ld(x,
4.1. Metric definition. 4. Expanding dynamical systems Definition 4.1. Let X be a compact metric space. A map f : X X is said to be expanding if there exist ɛ > 0 and L > 1 such that d(f(x), f(y)) Ld(x,
The Mean Value Theorem
 The Mean Value Theorem THEOREM (The Extreme Value Theorem): If f is continuous on a closed interval [a, b], then f attains an absolute maximum value f(c) and an absolute minimum value f(d) at some numbers
The Mean Value Theorem THEOREM (The Extreme Value Theorem): If f is continuous on a closed interval [a, b], then f attains an absolute maximum value f(c) and an absolute minimum value f(d) at some numbers
Continued Fractions and the Euclidean Algorithm
 Continued Fractions and the Euclidean Algorithm Lecture notes prepared for MATH 326, Spring 997 Department of Mathematics and Statistics University at Albany William F Hammond Table of Contents Introduction
Continued Fractions and the Euclidean Algorithm Lecture notes prepared for MATH 326, Spring 997 Department of Mathematics and Statistics University at Albany William F Hammond Table of Contents Introduction
Zeros of Polynomial Functions
 Zeros of Polynomial Functions The Rational Zero Theorem If f (x) = a n x n + a n-1 x n-1 + + a 1 x + a 0 has integer coefficients and p/q (where p/q is reduced) is a rational zero, then p is a factor of
Zeros of Polynomial Functions The Rational Zero Theorem If f (x) = a n x n + a n-1 x n-1 + + a 1 x + a 0 has integer coefficients and p/q (where p/q is reduced) is a rational zero, then p is a factor of
ROUTH S STABILITY CRITERION
 ECE 680 Modern Automatic Control Routh s Stability Criterion June 13, 2007 1 ROUTH S STABILITY CRITERION Consider a closed-loop transfer function H(s) = b 0s m + b 1 s m 1 + + b m 1 s + b m a 0 s n + s
ECE 680 Modern Automatic Control Routh s Stability Criterion June 13, 2007 1 ROUTH S STABILITY CRITERION Consider a closed-loop transfer function H(s) = b 0s m + b 1 s m 1 + + b m 1 s + b m a 0 s n + s
Method To Solve Linear, Polynomial, or Absolute Value Inequalities:
 Solving Inequalities An inequality is the result of replacing the = sign in an equation with ,, or. For example, 3x 2 < 7 is a linear inequality. We call it linear because if the < were replaced with
Solving Inequalities An inequality is the result of replacing the = sign in an equation with ,, or. For example, 3x 2 < 7 is a linear inequality. We call it linear because if the < were replaced with
Solutions to Homework 10
 Solutions to Homework 1 Section 7., exercise # 1 (b,d): (b) Compute the value of R f dv, where f(x, y) = y/x and R = [1, 3] [, 4]. Solution: Since f is continuous over R, f is integrable over R. Let x
Solutions to Homework 1 Section 7., exercise # 1 (b,d): (b) Compute the value of R f dv, where f(x, y) = y/x and R = [1, 3] [, 4]. Solution: Since f is continuous over R, f is integrable over R. Let x
Notes on metric spaces
 Notes on metric spaces 1 Introduction The purpose of these notes is to quickly review some of the basic concepts from Real Analysis, Metric Spaces and some related results that will be used in this course.
Notes on metric spaces 1 Introduction The purpose of these notes is to quickly review some of the basic concepts from Real Analysis, Metric Spaces and some related results that will be used in this course.
ON GALOIS REALIZATIONS OF THE 2-COVERABLE SYMMETRIC AND ALTERNATING GROUPS
 ON GALOIS REALIZATIONS OF THE 2-COVERABLE SYMMETRIC AND ALTERNATING GROUPS DANIEL RABAYEV AND JACK SONN Abstract. Let f(x) be a monic polynomial in Z[x] with no rational roots but with roots in Q p for
ON GALOIS REALIZATIONS OF THE 2-COVERABLE SYMMETRIC AND ALTERNATING GROUPS DANIEL RABAYEV AND JACK SONN Abstract. Let f(x) be a monic polynomial in Z[x] with no rational roots but with roots in Q p for
Planar Curve Intersection
 Chapter 7 Planar Curve Intersection Curve intersection involves finding the points at which two planar curves intersect. If the two curves are parametric, the solution also identifies the parameter values
Chapter 7 Planar Curve Intersection Curve intersection involves finding the points at which two planar curves intersect. If the two curves are parametric, the solution also identifies the parameter values
Math 319 Problem Set #3 Solution 21 February 2002
 Math 319 Problem Set #3 Solution 21 February 2002 1. ( 2.1, problem 15) Find integers a 1, a 2, a 3, a 4, a 5 such that every integer x satisfies at least one of the congruences x a 1 (mod 2), x a 2 (mod
Math 319 Problem Set #3 Solution 21 February 2002 1. ( 2.1, problem 15) Find integers a 1, a 2, a 3, a 4, a 5 such that every integer x satisfies at least one of the congruences x a 1 (mod 2), x a 2 (mod
a 1 x + a 0 =0. (3) ax 2 + bx + c =0. (4)
 ax 2 + bx + c =0. (4)") ROOTS OF POLYNOMIAL EQUATIONS In this unit we discuss polynomial equations. A polynomial in x of degree n, where n 0 is an integer, is an expression of the form P n (x) =a n x n + a n 1 x n 1 + + a 1 x
ROOTS OF POLYNOMIAL EQUATIONS In this unit we discuss polynomial equations. A polynomial in x of degree n, where n 0 is an integer, is an expression of the form P n (x) =a n x n + a n 1 x n 1 + + a 1 x
THE FUNDAMENTAL THEOREM OF ALGEBRA VIA PROPER MAPS
 THE FUNDAMENTAL THEOREM OF ALGEBRA VIA PROPER MAPS KEITH CONRAD 1. Introduction The Fundamental Theorem of Algebra says every nonconstant polynomial with complex coefficients can be factored into linear
THE FUNDAMENTAL THEOREM OF ALGEBRA VIA PROPER MAPS KEITH CONRAD 1. Introduction The Fundamental Theorem of Algebra says every nonconstant polynomial with complex coefficients can be factored into linear
Algebra 2 Chapter 1 Vocabulary. identity - A statement that equates two equivalent expressions.
 Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
The Method of Partial Fractions Math 121 Calculus II Spring 2015
 Rational functions. as The Method of Partial Fractions Math 11 Calculus II Spring 015 Recall that a rational function is a quotient of two polynomials such f(x) g(x) = 3x5 + x 3 + 16x x 60. The method
Rational functions. as The Method of Partial Fractions Math 11 Calculus II Spring 015 Recall that a rational function is a quotient of two polynomials such f(x) g(x) = 3x5 + x 3 + 16x x 60. The method
7. Some irreducible polynomials
 7. Some irreducible polynomials 7.1 Irreducibles over a finite field 7.2 Worked examples Linear factors x α of a polynomial P (x) with coefficients in a field k correspond precisely to roots α k [1] of
7. Some irreducible polynomials 7.1 Irreducibles over a finite field 7.2 Worked examples Linear factors x α of a polynomial P (x) with coefficients in a field k correspond precisely to roots α k [1] of
MATH 52: MATLAB HOMEWORK 2
 MATH 52: MATLAB HOMEWORK 2. omplex Numbers The prevalence of the complex numbers throughout the scientific world today belies their long and rocky history. Much like the negative numbers, complex numbers
MATH 52: MATLAB HOMEWORK 2. omplex Numbers The prevalence of the complex numbers throughout the scientific world today belies their long and rocky history. Much like the negative numbers, complex numbers
ON SEQUENTIAL CONTINUITY OF COMPOSITION MAPPING. 0. Introduction
 ON SEQUENTIAL CONTINUITY OF COMPOSITION MAPPING Abstract. In [1] there was proved a theorem concerning the continuity of the composition mapping, and there was announced a theorem on sequential continuity
ON SEQUENTIAL CONTINUITY OF COMPOSITION MAPPING Abstract. In [1] there was proved a theorem concerning the continuity of the composition mapping, and there was announced a theorem on sequential continuity
On using numerical algebraic geometry to find Lyapunov functions of polynomial dynamical systems
 Dynamics at the Horsetooth Volume 2, 2010. On using numerical algebraic geometry to find Lyapunov functions of polynomial dynamical systems Eric Hanson Department of Mathematics Colorado State University
Dynamics at the Horsetooth Volume 2, 2010. On using numerical algebraic geometry to find Lyapunov functions of polynomial dynamical systems Eric Hanson Department of Mathematics Colorado State University
Lecture 2: Universality
 CS 710: Complexity Theory 1/21/2010 Lecture 2: Universality Instructor: Dieter van Melkebeek Scribe: Tyson Williams In this lecture, we introduce the notion of a universal machine, develop efficient universal
CS 710: Complexity Theory 1/21/2010 Lecture 2: Universality Instructor: Dieter van Melkebeek Scribe: Tyson Williams In this lecture, we introduce the notion of a universal machine, develop efficient universal
Zeros of Polynomial Functions
 Review: Synthetic Division Find (x 2-5x - 5x 3 + x 4 ) (5 + x). Factor Theorem Solve 2x 3-5x 2 + x + 2 =0 given that 2 is a zero of f(x) = 2x 3-5x 2 + x + 2. Zeros of Polynomial Functions Introduction
Review: Synthetic Division Find (x 2-5x - 5x 3 + x 4 ) (5 + x). Factor Theorem Solve 2x 3-5x 2 + x + 2 =0 given that 2 is a zero of f(x) = 2x 3-5x 2 + x + 2. Zeros of Polynomial Functions Introduction
1 if 1 x 0 1 if 0 x 1
 Chapter 3 Continuity In this chapter we begin by defining the fundamental notion of continuity for real valued functions of a single real variable. When trying to decide whether a given function is or
Chapter 3 Continuity In this chapter we begin by defining the fundamental notion of continuity for real valued functions of a single real variable. When trying to decide whether a given function is or
Holomorphic motion of fiber Julia sets
 ACADEMIC REPORTS Fac. Eng. Tokyo Polytech. Univ. Vol. 37 No.1 (2014) 7 Shizuo Nakane We consider Axiom A polynomial skew products on C 2 of degree d 2. The stable manifold of a hyperbolic fiber Julia set
ACADEMIC REPORTS Fac. Eng. Tokyo Polytech. Univ. Vol. 37 No.1 (2014) 7 Shizuo Nakane We consider Axiom A polynomial skew products on C 2 of degree d 2. The stable manifold of a hyperbolic fiber Julia set
MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.436J/15.085J Fall 2008 Lecture 5 9/17/2008 RANDOM VARIABLES
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.436J/15.085J Fall 2008 Lecture 5 9/17/2008 RANDOM VARIABLES Contents 1. Random variables and measurable functions 2. Cumulative distribution functions 3. Discrete
MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.436J/15.085J Fall 2008 Lecture 5 9/17/2008 RANDOM VARIABLES Contents 1. Random variables and measurable functions 2. Cumulative distribution functions 3. Discrete
SOLUTIONS TO EXERCISES FOR. MATHEMATICS 205A Part 3. Spaces with special properties
 SOLUTIONS TO EXERCISES FOR MATHEMATICS 205A Part 3 Fall 2008 III. Spaces with special properties III.1 : Compact spaces I Problems from Munkres, 26, pp. 170 172 3. Show that a finite union of compact subspaces
SOLUTIONS TO EXERCISES FOR MATHEMATICS 205A Part 3 Fall 2008 III. Spaces with special properties III.1 : Compact spaces I Problems from Munkres, 26, pp. 170 172 3. Show that a finite union of compact subspaces
The Math Circle, Spring 2004
 The Math Circle, Spring 2004 (Talks by Gordon Ritter) What is Non-Euclidean Geometry? Most geometries on the plane R 2 are non-euclidean. Let s denote arc length. Then Euclidean geometry arises from the
The Math Circle, Spring 2004 (Talks by Gordon Ritter) What is Non-Euclidean Geometry? Most geometries on the plane R 2 are non-euclidean. Let s denote arc length. Then Euclidean geometry arises from the
INTRODUCTION TO ALGEBRAIC GEOMETRY, CLASS 24
 INTRODUCTION TO ALGEBRAIC GEOMETRY, CLASS 24 RAVI VAKIL Contents 1. Degree of a line bundle / invertible sheaf 1 1.1. Last time 1 1.2. New material 2 2. The sheaf of differentials of a nonsingular curve
INTRODUCTION TO ALGEBRAIC GEOMETRY, CLASS 24 RAVI VAKIL Contents 1. Degree of a line bundle / invertible sheaf 1 1.1. Last time 1 1.2. New material 2 2. The sheaf of differentials of a nonsingular curve
Memoir on iterations of rational functions ( 1 ) Mémoire sur l itération des fonctions rationnelles ( 2 )
 Mémoire sur l itération des fonctions rationnelles ( 2 )") Memoir on iterations of rational functions ( ) Mémoire sur l itération des fonctions rationnelles ( ) written by Gaston Maurice Julia Translated in English by Alessandro Rosa Alessandro Rosa Home address
Memoir on iterations of rational functions ( ) Mémoire sur l itération des fonctions rationnelles ( ) written by Gaston Maurice Julia Translated in English by Alessandro Rosa Alessandro Rosa Home address
25.1 Moduli space of the complex cubic polynomials.
 920 1995 229-235 229 Abstract We define center curves in the moduli space, consisting of all affine conjugacy classes of cubic maps and analyse the dynamics of, maps along these curves 251 Moduli space
920 1995 229-235 229 Abstract We define center curves in the moduli space, consisting of all affine conjugacy classes of cubic maps and analyse the dynamics of, maps along these curves 251 Moduli space
On the largest prime factor of x 2 1
 On the largest prime factor of x 2 1 Florian Luca and Filip Najman Abstract In this paper, we find all integers x such that x 2 1 has only prime factors smaller than 100. This gives some interesting numerical
On the largest prime factor of x 2 1 Florian Luca and Filip Najman Abstract In this paper, we find all integers x such that x 2 1 has only prime factors smaller than 100. This gives some interesting numerical
LIMITS AND CONTINUITY
 LIMITS AND CONTINUITY 1 The concept of it Eample 11 Let f() = 2 4 Eamine the behavior of f() as approaches 2 2 Solution Let us compute some values of f() for close to 2, as in the tables below We see from
LIMITS AND CONTINUITY 1 The concept of it Eample 11 Let f() = 2 4 Eamine the behavior of f() as approaches 2 2 Solution Let us compute some values of f() for close to 2, as in the tables below We see from
CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION 1. BASIC DIVISIBILITY THEORY
 January 10, 2010 CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION 1. BASIC DIVISIBILITY THEORY The set of polynomials over a field F is a ring, whose structure shares with the ring of integers many characteristics.
January 10, 2010 CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION 1. BASIC DIVISIBILITY THEORY The set of polynomials over a field F is a ring, whose structure shares with the ring of integers many characteristics.
Math 4310 Handout - Quotient Vector Spaces
 Math 4310 Handout - Quotient Vector Spaces Dan Collins The textbook defines a subspace of a vector space in Chapter 4, but it avoids ever discussing the notion of a quotient space. This is understandable
Math 4310 Handout - Quotient Vector Spaces Dan Collins The textbook defines a subspace of a vector space in Chapter 4, but it avoids ever discussing the notion of a quotient space. This is understandable
Algebra Unpacked Content For the new Common Core standards that will be effective in all North Carolina schools in the 2012-13 school year.
 This document is designed to help North Carolina educators teach the Common Core (Standard Course of Study). NCDPI staff are continually updating and improving these tools to better serve teachers. Algebra
This document is designed to help North Carolina educators teach the Common Core (Standard Course of Study). NCDPI staff are continually updating and improving these tools to better serve teachers. Algebra
Fundamental Theorems of Vector Calculus
 Fundamental Theorems of Vector Calculus We have studied the techniques for evaluating integrals over curves and surfaces. In the case of integrating over an interval on the real line, we were able to use
Fundamental Theorems of Vector Calculus We have studied the techniques for evaluating integrals over curves and surfaces. In the case of integrating over an interval on the real line, we were able to use
Surgery in Complex Dynamics.
 Surgery in Complex Dynamics. Carsten Lunde Petersen IMFUFA at NSM, Roskilde University Quasi-conformal massage, -maps on drugs -. p. 1/19 Introduction Magic Lecture 1: Cut and Past surgery using interpolations.
Surgery in Complex Dynamics. Carsten Lunde Petersen IMFUFA at NSM, Roskilde University Quasi-conformal massage, -maps on drugs -. p. 1/19 Introduction Magic Lecture 1: Cut and Past surgery using interpolations.
Copyrighted Material. Chapter 1 DEGREE OF A CURVE
 Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
March 29, 2011. 171S4.4 Theorems about Zeros of Polynomial Functions
 MAT 171 Precalculus Algebra Dr. Claude Moore Cape Fear Community College CHAPTER 4: Polynomial and Rational Functions 4.1 Polynomial Functions and Models 4.2 Graphing Polynomial Functions 4.3 Polynomial
MAT 171 Precalculus Algebra Dr. Claude Moore Cape Fear Community College CHAPTER 4: Polynomial and Rational Functions 4.1 Polynomial Functions and Models 4.2 Graphing Polynomial Functions 4.3 Polynomial
A Short Proof that Compact 2-Manifolds Can Be Triangulated
 Inventiones math. 5, 160--162 (1968) A Short Proof that Compact 2-Manifolds Can Be Triangulated P. H. DOYLE and D. A. MORAN* (East Lansing, Michigan) The result mentioned in the title of this paper was
Inventiones math. 5, 160--162 (1968) A Short Proof that Compact 2-Manifolds Can Be Triangulated P. H. DOYLE and D. A. MORAN* (East Lansing, Michigan) The result mentioned in the title of this paper was
POLYNOMIAL FUNCTIONS
 POLYNOMIAL FUNCTIONS Polynomial Division.. 314 The Rational Zero Test.....317 Descarte s Rule of Signs... 319 The Remainder Theorem.....31 Finding all Zeros of a Polynomial Function.......33 Writing a
POLYNOMIAL FUNCTIONS Polynomial Division.. 314 The Rational Zero Test.....317 Descarte s Rule of Signs... 319 The Remainder Theorem.....31 Finding all Zeros of a Polynomial Function.......33 Writing a
HOMEWORK 5 SOLUTIONS. n!f n (1) lim. ln x n! + xn x. 1 = G n 1 (x). (2) k + 1 n. (n 1)!
 lim. ln x n! + xn x. 1 = G n 1 (x). (2) k + 1 n. (n 1)!") Math 7 Fall 205 HOMEWORK 5 SOLUTIONS Problem. 2008 B2 Let F 0 x = ln x. For n 0 and x > 0, let F n+ x = 0 F ntdt. Evaluate n!f n lim n ln n. By directly computing F n x for small n s, we obtain the following
Math 7 Fall 205 HOMEWORK 5 SOLUTIONS Problem. 2008 B2 Let F 0 x = ln x. For n 0 and x > 0, let F n+ x = 0 F ntdt. Evaluate n!f n lim n ln n. By directly computing F n x for small n s, we obtain the following
Zeros of Polynomial Functions
 Zeros of Polynomial Functions Objectives: 1.Use the Fundamental Theorem of Algebra to determine the number of zeros of polynomial functions 2.Find rational zeros of polynomial functions 3.Find conjugate
Zeros of Polynomial Functions Objectives: 1.Use the Fundamental Theorem of Algebra to determine the number of zeros of polynomial functions 2.Find rational zeros of polynomial functions 3.Find conjugate
Classification of Cartan matrices
 Chapter 7 Classification of Cartan matrices In this chapter we describe a classification of generalised Cartan matrices This classification can be compared as the rough classification of varieties in terms
Chapter 7 Classification of Cartan matrices In this chapter we describe a classification of generalised Cartan matrices This classification can be compared as the rough classification of varieties in terms
Definition 8.1 Two inequalities are equivalent if they have the same solution set. Add or Subtract the same value on both sides of the inequality.
 8 Inequalities Concepts: Equivalent Inequalities Linear and Nonlinear Inequalities Absolute Value Inequalities (Sections 4.6 and 1.1) 8.1 Equivalent Inequalities Definition 8.1 Two inequalities are equivalent
8 Inequalities Concepts: Equivalent Inequalities Linear and Nonlinear Inequalities Absolute Value Inequalities (Sections 4.6 and 1.1) 8.1 Equivalent Inequalities Definition 8.1 Two inequalities are equivalent
Higher Education Math Placement
 Higher Education Math Placement Placement Assessment Problem Types 1. Whole Numbers, Fractions, and Decimals 1.1 Operations with Whole Numbers Addition with carry Subtraction with borrowing Multiplication
Higher Education Math Placement Placement Assessment Problem Types 1. Whole Numbers, Fractions, and Decimals 1.1 Operations with Whole Numbers Addition with carry Subtraction with borrowing Multiplication
ON TORI TRIANGULATIONS ASSOCIATED WITH TWO-DIMENSIONAL CONTINUED FRACTIONS OF CUBIC IRRATIONALITIES.
 ON TORI TRIANGULATIONS ASSOCIATED WITH TWO-DIMENSIONAL CONTINUED FRACTIONS OF CUBIC IRRATIONALITIES. O. N. KARPENKOV Introduction. A series of properties for ordinary continued fractions possesses multidimensional
ON TORI TRIANGULATIONS ASSOCIATED WITH TWO-DIMENSIONAL CONTINUED FRACTIONS OF CUBIC IRRATIONALITIES. O. N. KARPENKOV Introduction. A series of properties for ordinary continued fractions possesses multidimensional
Math 241, Exam 1 Information.
 Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Metric Spaces. Chapter 7. 7.1. Metrics
 Chapter 7 Metric Spaces A metric space is a set X that has a notion of the distance d(x, y) between every pair of points x, y X. The purpose of this chapter is to introduce metric spaces and give some
Chapter 7 Metric Spaces A metric space is a set X that has a notion of the distance d(x, y) between every pair of points x, y X. The purpose of this chapter is to introduce metric spaces and give some
Inner Product Spaces
 Math 571 Inner Product Spaces 1. Preliminaries An inner product space is a vector space V along with a function, called an inner product which associates each pair of vectors u, v with a scalar u, v, and
Math 571 Inner Product Spaces 1. Preliminaries An inner product space is a vector space V along with a function, called an inner product which associates each pair of vectors u, v with a scalar u, v, and
Math/Stats 425 Introduction to Probability. 1. Uncertainty and the axioms of probability
 Math/Stats 425 Introduction to Probability 1. Uncertainty and the axioms of probability Processes in the real world are random if outcomes cannot be predicted with certainty. Example: coin tossing, stock
Math/Stats 425 Introduction to Probability 1. Uncertainty and the axioms of probability Processes in the real world are random if outcomes cannot be predicted with certainty. Example: coin tossing, stock
Indiana State Core Curriculum Standards updated 2009 Algebra I
 Indiana State Core Curriculum Standards updated 2009 Algebra I Strand Description Boardworks High School Algebra presentations Operations With Real Numbers Linear Equations and A1.1 Students simplify and
Indiana State Core Curriculum Standards updated 2009 Algebra I Strand Description Boardworks High School Algebra presentations Operations With Real Numbers Linear Equations and A1.1 Students simplify and
How To Prove The Dirichlet Unit Theorem
 Chapter 6 The Dirichlet Unit Theorem As usual, we will be working in the ring B of algebraic integers of a number field L. Two factorizations of an element of B are regarded as essentially the same if
Chapter 6 The Dirichlet Unit Theorem As usual, we will be working in the ring B of algebraic integers of a number field L. Two factorizations of an element of B are regarded as essentially the same if
MATH 10550, EXAM 2 SOLUTIONS. x 2 + 2xy y 2 + x = 2
 MATH 10550, EXAM SOLUTIONS (1) Find an equation for the tangent line to at the point (1, ). + y y + = Solution: The equation of a line requires a point and a slope. The problem gives us the point so we
MATH 10550, EXAM SOLUTIONS (1) Find an equation for the tangent line to at the point (1, ). + y y + = Solution: The equation of a line requires a point and a slope. The problem gives us the point so we
2.5 ZEROS OF POLYNOMIAL FUNCTIONS. Copyright Cengage Learning. All rights reserved.
 2.5 ZEROS OF POLYNOMIAL FUNCTIONS Copyright Cengage Learning. All rights reserved. What You Should Learn Use the Fundamental Theorem of Algebra to determine the number of zeros of polynomial functions.
2.5 ZEROS OF POLYNOMIAL FUNCTIONS Copyright Cengage Learning. All rights reserved. What You Should Learn Use the Fundamental Theorem of Algebra to determine the number of zeros of polynomial functions.
Increasing for all. Convex for all. ( ) Increasing for all (remember that the log function is only defined for ). ( ) Concave for all.
 Increasing for all (remember that the log function is only defined for ). ( ) Concave for all.") 1. Differentiation The first derivative of a function measures by how much changes in reaction to an infinitesimal shift in its argument. The largest the derivative (in absolute value), the faster is evolving.
1. Differentiation The first derivative of a function measures by how much changes in reaction to an infinitesimal shift in its argument. The largest the derivative (in absolute value), the faster is evolving.
PYTHAGOREAN TRIPLES KEITH CONRAD
 PYTHAGOREAN TRIPLES KEITH CONRAD 1. Introduction A Pythagorean triple is a triple of positive integers (a, b, c) where a + b = c. Examples include (3, 4, 5), (5, 1, 13), and (8, 15, 17). Below is an ancient
PYTHAGOREAN TRIPLES KEITH CONRAD 1. Introduction A Pythagorean triple is a triple of positive integers (a, b, c) where a + b = c. Examples include (3, 4, 5), (5, 1, 13), and (8, 15, 17). Below is an ancient
ON FOCK-GONCHAROV COORDINATES OF THE ONCE-PUNCTURED TORUS GROUP
 ON FOCK-GONCHAROV COORDINATES OF THE ONCE-PUNCTURED TORUS GROUP YUICHI KABAYA Introduction In their seminal paper [3], Fock and Goncharov defined positive representations of the fundamental group of a
ON FOCK-GONCHAROV COORDINATES OF THE ONCE-PUNCTURED TORUS GROUP YUICHI KABAYA Introduction In their seminal paper [3], Fock and Goncharov defined positive representations of the fundamental group of a
ON ISOMORPHISMS OF BERS FIBER SPACES
 Annales Academiæ Scientiarum Fennicæ Mathematica Volumen 22, 1997, 255 274 ON ISOMORPHISMS OF BERS FIBER SPACES Chaohui Zhang State University of New York, Mathematics Department, Stony Brook, NY 11794,
Annales Academiæ Scientiarum Fennicæ Mathematica Volumen 22, 1997, 255 274 ON ISOMORPHISMS OF BERS FIBER SPACES Chaohui Zhang State University of New York, Mathematics Department, Stony Brook, NY 11794,
Unified Lecture # 4 Vectors
 Fall 2005 Unified Lecture # 4 Vectors These notes were written by J. Peraire as a review of vectors for Dynamics 16.07. They have been adapted for Unified Engineering by R. Radovitzky. References [1] Feynmann,
Fall 2005 Unified Lecture # 4 Vectors These notes were written by J. Peraire as a review of vectors for Dynamics 16.07. They have been adapted for Unified Engineering by R. Radovitzky. References [1] Feynmann,
Core Maths C1. Revision Notes
 Core Maths C Revision Notes November 0 Core Maths C Algebra... Indices... Rules of indices... Surds... 4 Simplifying surds... 4 Rationalising the denominator... 4 Quadratic functions... 4 Completing the
Core Maths C Revision Notes November 0 Core Maths C Algebra... Indices... Rules of indices... Surds... 4 Simplifying surds... 4 Rationalising the denominator... 4 Quadratic functions... 4 Completing the
This unit will lay the groundwork for later units where the students will extend this knowledge to quadratic and exponential functions.
 Algebra I Overview View unit yearlong overview here Many of the concepts presented in Algebra I are progressions of concepts that were introduced in grades 6 through 8. The content presented in this course
Algebra I Overview View unit yearlong overview here Many of the concepts presented in Algebra I are progressions of concepts that were introduced in grades 6 through 8. The content presented in this course
COMPLEX NUMBERS AND SERIES. Contents
 COMPLEX NUMBERS AND SERIES MIKE BOYLE Contents 1. Complex Numbers Definition 1.1. A complex number is a number z of the form z = x + iy, where x and y are real numbers, and i is another number such that
COMPLEX NUMBERS AND SERIES MIKE BOYLE Contents 1. Complex Numbers Definition 1.1. A complex number is a number z of the form z = x + iy, where x and y are real numbers, and i is another number such that
Vieta s Formulas and the Identity Theorem
 Vieta s Formulas and the Identity Theorem This worksheet will work through the material from our class on 3/21/2013 with some examples that should help you with the homework The topic of our discussion
Vieta s Formulas and the Identity Theorem This worksheet will work through the material from our class on 3/21/2013 with some examples that should help you with the homework The topic of our discussion
Math 0980 Chapter Objectives. Chapter 1: Introduction to Algebra: The Integers.
 Math 0980 Chapter Objectives Chapter 1: Introduction to Algebra: The Integers. 1. Identify the place value of a digit. 2. Write a number in words or digits. 3. Write positive and negative numbers used
Math 0980 Chapter Objectives Chapter 1: Introduction to Algebra: The Integers. 1. Identify the place value of a digit. 2. Write a number in words or digits. 3. Write positive and negative numbers used
TOPIC 4: DERIVATIVES
 TOPIC 4: DERIVATIVES 1. The derivative of a function. Differentiation rules 1.1. The slope of a curve. The slope of a curve at a point P is a measure of the steepness of the curve. If Q is a point on the
TOPIC 4: DERIVATIVES 1. The derivative of a function. Differentiation rules 1.1. The slope of a curve. The slope of a curve at a point P is a measure of the steepness of the curve. If Q is a point on the
Orbits of the Lennard-Jones Potential
 Orbits of the Lennard-Jones Potential Prashanth S. Venkataram July 28, 2012 1 Introduction The Lennard-Jones potential describes weak interactions between neutral atoms and molecules. Unlike the potentials
Orbits of the Lennard-Jones Potential Prashanth S. Venkataram July 28, 2012 1 Introduction The Lennard-Jones potential describes weak interactions between neutral atoms and molecules. Unlike the potentials
NOTES ON THE DYNAMICS OF LINEAR OPERATORS
 NOTES ON THE DYNAMICS OF LINEAR OPERATORS JOEL H. SHAPIRO Abstract. These are notes for a series of lectures that illustrate how continuous linear transformations of infinite dimensional topological vector
NOTES ON THE DYNAMICS OF LINEAR OPERATORS JOEL H. SHAPIRO Abstract. These are notes for a series of lectures that illustrate how continuous linear transformations of infinite dimensional topological vector
Higher Order Equations
 Higher Order Equations We briefly consider how what we have done with order two equations generalizes to higher order linear equations. Fortunately, the generalization is very straightforward: 1. Theory.
Higher Order Equations We briefly consider how what we have done with order two equations generalizes to higher order linear equations. Fortunately, the generalization is very straightforward: 1. Theory.
3.3. Solving Polynomial Equations. Introduction. Prerequisites. Learning Outcomes
 Solving Polynomial Equations 3.3 Introduction Linear and quadratic equations, dealt within Sections 3.1 and 3.2, are members of a class of equations, called polynomial equations. These have the general
Solving Polynomial Equations 3.3 Introduction Linear and quadratic equations, dealt within Sections 3.1 and 3.2, are members of a class of equations, called polynomial equations. These have the general
MCS 563 Spring 2014 Analytic Symbolic Computation Wednesday 9 April. Hilbert Polynomials
 Hilbert Polynomials For a monomial ideal, we derive the dimension counting the monomials in the complement, arriving at the notion of the Hilbert polynomial. The first half of the note is derived from
Hilbert Polynomials For a monomial ideal, we derive the dimension counting the monomials in the complement, arriving at the notion of the Hilbert polynomial. The first half of the note is derived from
Some Lecture Notes and In-Class Examples for Pre-Calculus:
 Some Lecture Notes and In-Class Examples for Pre-Calculus: Section.7 Definition of a Quadratic Inequality A quadratic inequality is any inequality that can be put in one of the forms ax + bx + c < 0 ax
Some Lecture Notes and In-Class Examples for Pre-Calculus: Section.7 Definition of a Quadratic Inequality A quadratic inequality is any inequality that can be put in one of the forms ax + bx + c < 0 ax
Separable First Order Differential Equations
 Separable First Order Differential Equations Form of Separable Equations which take the form = gx hy or These are differential equations = gxĥy, where gx is a continuous function of x and hy is a continuously
Separable First Order Differential Equations Form of Separable Equations which take the form = gx hy or These are differential equations = gxĥy, where gx is a continuous function of x and hy is a continuously
On the Palis Conjecture
 On the Palis Conjecture Sebastian van Strien (Warwick) Unless stated otherwise, the results are joint with a subset of {H. Bruin, J. Rivera-Letelier, W. Shen, O Kozlovski.} January 10, 2007 1 Contents
On the Palis Conjecture Sebastian van Strien (Warwick) Unless stated otherwise, the results are joint with a subset of {H. Bruin, J. Rivera-Letelier, W. Shen, O Kozlovski.} January 10, 2007 1 Contents
JUST THE MATHS UNIT NUMBER 1.8. ALGEBRA 8 (Polynomials) A.J.Hobson
 A.J.Hobson") JUST THE MATHS UNIT NUMBER 1.8 ALGEBRA 8 (Polynomials) by A.J.Hobson 1.8.1 The factor theorem 1.8.2 Application to quadratic and cubic expressions 1.8.3 Cubic equations 1.8.4 Long division of polynomials
JUST THE MATHS UNIT NUMBER 1.8 ALGEBRA 8 (Polynomials) by A.J.Hobson 1.8.1 The factor theorem 1.8.2 Application to quadratic and cubic expressions 1.8.3 Cubic equations 1.8.4 Long division of polynomials
Math 181 Handout 16. Rich Schwartz. March 9, 2010
 Math 8 Handout 6 Rich Schwartz March 9, 200 The purpose of this handout is to describe continued fractions and their connection to hyperbolic geometry. The Gauss Map Given any x (0, ) we define γ(x) =
Math 8 Handout 6 Rich Schwartz March 9, 200 The purpose of this handout is to describe continued fractions and their connection to hyperbolic geometry. The Gauss Map Given any x (0, ) we define γ(x) =
5.1 Radical Notation and Rational Exponents
 Section 5.1 Radical Notation and Rational Exponents 1 5.1 Radical Notation and Rational Exponents We now review how exponents can be used to describe not only powers (such as 5 2 and 2 3 ), but also roots
Section 5.1 Radical Notation and Rational Exponents 1 5.1 Radical Notation and Rational Exponents We now review how exponents can be used to describe not only powers (such as 5 2 and 2 3 ), but also roots
Equations, Inequalities & Partial Fractions
 Contents Equations, Inequalities & Partial Fractions.1 Solving Linear Equations 2.2 Solving Quadratic Equations 1. Solving Polynomial Equations 1.4 Solving Simultaneous Linear Equations 42.5 Solving Inequalities
Contents Equations, Inequalities & Partial Fractions.1 Solving Linear Equations 2.2 Solving Quadratic Equations 1. Solving Polynomial Equations 1.4 Solving Simultaneous Linear Equations 42.5 Solving Inequalities
Smooth functions statistics
 Smooth functions statistics V. I. rnold To describe the topological structure of a real smooth function one associates to it the graph, formed by the topological variety, whose points are the connected
Smooth functions statistics V. I. rnold To describe the topological structure of a real smooth function one associates to it the graph, formed by the topological variety, whose points are the connected
Chapter 17. Orthogonal Matrices and Symmetries of Space
 Chapter 17. Orthogonal Matrices and Symmetries of Space Take a random matrix, say 1 3 A = 4 5 6, 7 8 9 and compare the lengths of e 1 and Ae 1. The vector e 1 has length 1, while Ae 1 = (1, 4, 7) has length
Chapter 17. Orthogonal Matrices and Symmetries of Space Take a random matrix, say 1 3 A = 4 5 6, 7 8 9 and compare the lengths of e 1 and Ae 1. The vector e 1 has length 1, while Ae 1 = (1, 4, 7) has length
The Factor Theorem and a corollary of the Fundamental Theorem of Algebra
 Math 421 Fall 2010 The Factor Theorem and a corollary of the Fundamental Theorem of Algebra 27 August 2010 Copyright 2006 2010 by Murray Eisenberg. All rights reserved. Prerequisites Mathematica Aside
Math 421 Fall 2010 The Factor Theorem and a corollary of the Fundamental Theorem of Algebra 27 August 2010 Copyright 2006 2010 by Murray Eisenberg. All rights reserved. Prerequisites Mathematica Aside
88 CHAPTER 2. VECTOR FUNCTIONS. . First, we need to compute T (s). a By definition, r (s) T (s) = 1 a sin s a. sin s a, cos s a
. a By definition, r (s) T (s) = 1 a sin s a. sin s a, cos s a") 88 CHAPTER. VECTOR FUNCTIONS.4 Curvature.4.1 Definitions and Examples The notion of curvature measures how sharply a curve bends. We would expect the curvature to be 0 for a straight line, to be very small
88 CHAPTER. VECTOR FUNCTIONS.4 Curvature.4.1 Definitions and Examples The notion of curvature measures how sharply a curve bends. We would expect the curvature to be 0 for a straight line, to be very small
6. Define log(z) so that π < I log(z) π. Discuss the identities e log(z) = z and log(e w ) = w.
 so that π < I log(z) π. Discuss the identities e log(z) = z and log(e w ) = w.") hapter omplex integration. omplex number quiz. Simplify 3+4i. 2. Simplify 3+4i. 3. Find the cube roots of. 4. Here are some identities for complex conjugate. Which ones need correction? z + w = z + w,
hapter omplex integration. omplex number quiz. Simplify 3+4i. 2. Simplify 3+4i. 3. Find the cube roots of. 4. Here are some identities for complex conjugate. Which ones need correction? z + w = z + w,
South Carolina College- and Career-Ready (SCCCR) Algebra 1
 Algebra 1") South Carolina College- and Career-Ready (SCCCR) Algebra 1 South Carolina College- and Career-Ready Mathematical Process Standards The South Carolina College- and Career-Ready (SCCCR) Mathematical Process
South Carolina College- and Career-Ready (SCCCR) Algebra 1 South Carolina College- and Career-Ready Mathematical Process Standards The South Carolina College- and Career-Ready (SCCCR) Mathematical Process
the points are called control points approximating curve
 Chapter 4 Spline Curves A spline curve is a mathematical representation for which it is easy to build an interface that will allow a user to design and control the shape of complex curves and surfaces.
Chapter 4 Spline Curves A spline curve is a mathematical representation for which it is easy to build an interface that will allow a user to design and control the shape of complex curves and surfaces.
SOLVING EQUATIONS WITH RADICALS AND EXPONENTS 9.5. section ( 3 5 3 2 )( 3 25 3 10 3 4 ). The Odd-Root Property
( 3 25 3 10 3 4 ). The Odd-Root Property") 498 (9 3) Chapter 9 Radicals and Rational Exponents Replace the question mark by an expression that makes the equation correct. Equations involving variables are to be identities. 75. 6 76. 3?? 1 77. 1
498 (9 3) Chapter 9 Radicals and Rational Exponents Replace the question mark by an expression that makes the equation correct. Equations involving variables are to be identities. 75. 6 76. 3?? 1 77. 1
Chapter 4. Polynomial and Rational Functions. 4.1 Polynomial Functions and Their Graphs
 Chapter 4. Polynomial and Rational Functions 4.1 Polynomial Functions and Their Graphs A polynomial function of degree n is a function of the form P = a n n + a n 1 n 1 + + a 2 2 + a 1 + a 0 Where a s
Chapter 4. Polynomial and Rational Functions 4.1 Polynomial Functions and Their Graphs A polynomial function of degree n is a function of the form P = a n n + a n 1 n 1 + + a 2 2 + a 1 + a 0 Where a s
CORRELATED TO THE SOUTH CAROLINA COLLEGE AND CAREER-READY FOUNDATIONS IN ALGEBRA
 We Can Early Learning Curriculum PreK Grades 8 12 INSIDE ALGEBRA, GRADES 8 12 CORRELATED TO THE SOUTH CAROLINA COLLEGE AND CAREER-READY FOUNDATIONS IN ALGEBRA April 2016 www.voyagersopris.com Mathematical
We Can Early Learning Curriculum PreK Grades 8 12 INSIDE ALGEBRA, GRADES 8 12 CORRELATED TO THE SOUTH CAROLINA COLLEGE AND CAREER-READY FOUNDATIONS IN ALGEBRA April 2016 www.voyagersopris.com Mathematical
Second Order Linear Nonhomogeneous Differential Equations; Method of Undetermined Coefficients. y + p(t) y + q(t) y = g(t), g(t) 0.
 y + q(t) y = g(t), g(t) 0.") Second Order Linear Nonhomogeneous Differential Equations; Method of Undetermined Coefficients We will now turn our attention to nonhomogeneous second order linear equations, equations with the standard
Second Order Linear Nonhomogeneous Differential Equations; Method of Undetermined Coefficients We will now turn our attention to nonhomogeneous second order linear equations, equations with the standard
Georg Cantor (1845-1918):
:") Georg Cantor (845-98): The man who tamed infinity lecture by Eric Schechter Associate Professor of Mathematics Vanderbilt University http://www.math.vanderbilt.edu/ schectex/ In papers of 873 and 874,
Georg Cantor (845-98): The man who tamed infinity lecture by Eric Schechter Associate Professor of Mathematics Vanderbilt University http://www.math.vanderbilt.edu/ schectex/ In papers of 873 and 874,
A QUICK GUIDE TO THE FORMULAS OF MULTIVARIABLE CALCULUS
 A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
9 More on differentiation
 Tel Aviv University, 2013 Measure and category 75 9 More on differentiation 9a Finite Taylor expansion............... 75 9b Continuous and nowhere differentiable..... 78 9c Differentiable and nowhere monotone......
Tel Aviv University, 2013 Measure and category 75 9 More on differentiation 9a Finite Taylor expansion............... 75 9b Continuous and nowhere differentiable..... 78 9c Differentiable and nowhere monotone......
Algebra and Geometry Review (61 topics, no due date)
") Course Name: Math 112 Credit Exam LA Tech University Course Code: ALEKS Course: Trigonometry Instructor: Course Dates: Course Content: 159 topics Algebra and Geometry Review (61 topics, no due date) Properties
Course Name: Math 112 Credit Exam LA Tech University Course Code: ALEKS Course: Trigonometry Instructor: Course Dates: Course Content: 159 topics Algebra and Geometry Review (61 topics, no due date) Properties
a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a 2n x n = b 2.
 Chapter 1 LINEAR EQUATIONS 1.1 Introduction to linear equations A linear equation in n unknowns x 1, x,, x n is an equation of the form a 1 x 1 + a x + + a n x n = b, where a 1, a,..., a n, b are given
Chapter 1 LINEAR EQUATIONS 1.1 Introduction to linear equations A linear equation in n unknowns x 1, x,, x n is an equation of the form a 1 x 1 + a x + + a n x n = b, where a 1, a,..., a n, b are given
Polynomial Degree and Finite Differences
 CONDENSED LESSON 7.1 Polynomial Degree and Finite Differences In this lesson you will learn the terminology associated with polynomials use the finite differences method to determine the degree of a polynomial
CONDENSED LESSON 7.1 Polynomial Degree and Finite Differences In this lesson you will learn the terminology associated with polynomials use the finite differences method to determine the degree of a polynomial