Learning Local RGB-to-CAD Correspondences for Object Pose Estimation
|
|
|
- Marianna Merritt
- 3 years ago
- Views:
Transcription


1 Learning Local RGB-to-CAD Correspondences for Object Pose Estimation Georgios Georgakis 1, Srikrishna Karanam 2, Ziyan Wu 2, and Jana Kosecka 1 George Mason University 1, Siemens Corporate Technology 2 1

2 Object Pose Estimation Given an RGB image of an object, estimate rotation matrix R SO(3) and translation vector t R 3. R is parameterized by the three Euler angles: azimuth, elevation, in-plane rotation. 2
3 Object Pose Estimation Essentially estimate an object s orientation and position relative to a coordinate system. Challenges: Estimating geometry from 2D image plane. Large space of possible rotation matrices. Large variety of object shapes. 3




4 Applications Autonomous driving Indoor navigation Augmented Reality Robotic manipulation 4


 using set")
5 Traditional Pose Estimation Keypoints: Interest points which yield discriminative representations and can be matched reliably across images. 3D Model Keypoint detection Pose estimated through Perspective-n- Point (PnP) using set of correspondences. Reference frame Pose 5
6 Related work Viewpoint conditioned keypoints [Tulsiani et al. 2015] Fixed semantic keypoints [Pavlakos et al. 2017] Single-step pose regression [Poirson et al. 2016] Classification-Regression Hybrid [Deep3DBox, Mousavian et al. 2017] 6
7 Related work Viewpoint conditioned keypoints [Tulsiani et al. 2015] Fixed semantic keypoints [Pavlakos et al. 2017] Require 3D pose or keypoint annotations for RGB images. Acquiring precise pose annotations is tedious. Single-step pose regression [Poirson et al. 2016] Classification-Regression Hybrid [Deep3DBox, Mousavian et al. 2017] 7

8 Getting Pose Annotations Sun et al, Pix3D: Dataset and Methods for Single-Image 3D Shape Modeling,




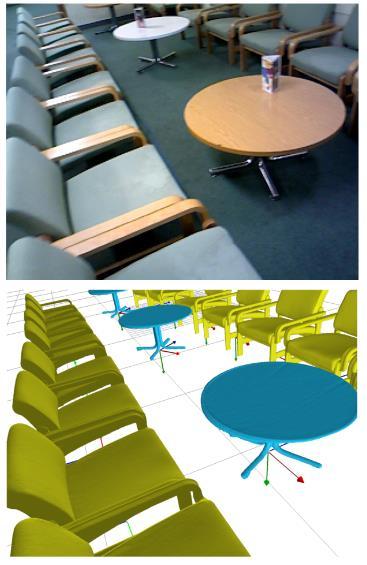
9 Correspondence Learning for Object Pose Estimation We focus on finding the association of parts of objects depicted in RGB images with their counterparts in 3D depth images. Large appearance gap between RGB and depth data. Large viewpoint variation. Perspective-n-Point (PnP) Learn how to select which parts of objects are most informative (Keypoint detection). We do not rely on keypoint annotations. 9




10 Testing Repository of 3D keypoints and descriptors Establish 2D-3D correspondences PnP R, t 10


11 Overview We do not use: Explicit 3D Pose annotations on RGB images. Textured 3D models. 11


12 Architecture outline Keypoint and descriptor learning. Cross-modality representation learning. 12


13 Keypoint learning by relative pose estimation Relative pose loss: For a weighted set of corresponding points find the rigid transformation for which the re-projection error is minimum. R, t = arg n min R SO 3,t R 3 i=1 w i Rp i + t q i 2 Given the correspondences, there exists a differentiable SVD-based closed form solution for estimating R, t. 16


14 Learning keypoint descriptors Triplet loss : Local features of anchor, positive, and negative from triplet i. Triplet examples: 17



15 Cross-modality representation learning Transfer learned features and keypoints from branches A,B,C to branch D. Inspired by knowledge distillation. 18

16 Examples of learned representations View alignment Cross-modality alignment 19


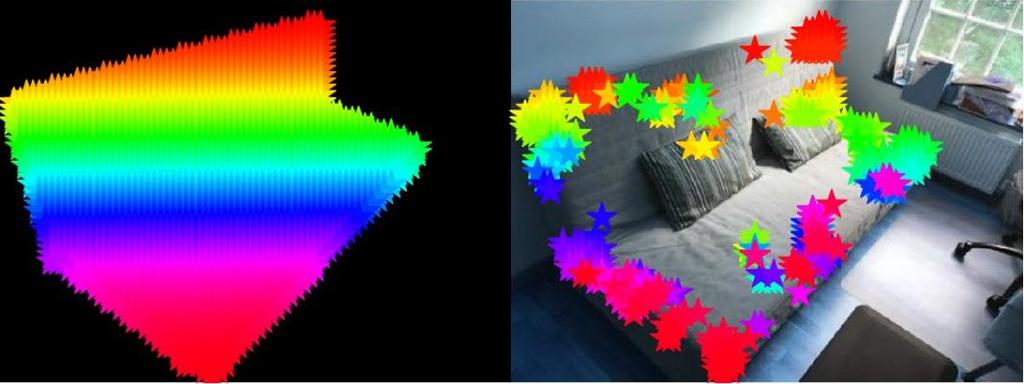

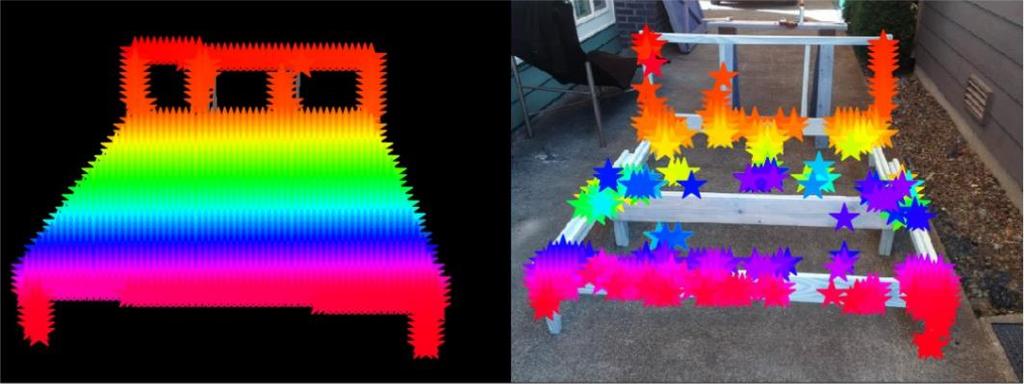

17 Examples of learned representations View alignment Cross-modality alignment 20



18 Experiments Pascal3D+: Manual alignment of generic 3D models on images Pix3D: Precise 3D pose annotations for object instances 21

19 Results Evaluation metric: Geodesic distance Comparison with supervised approaches Training on Pix3D Testing on Pascal3D+ Category Chair Sofa Metric Acc π 6 MedErr Acc π 6 MedErr Render for CNN [33] Vps & Kps [39] Deep3DBox [25] Proposed



20 Ablation Study - Baselines Baseline-A: Assess the importance of the cross-modality representation learning. Baseline-ZDDA: Assess the importance of learning the keypoints and their viewinvariant representations. 23
21 Ablation Study Results Category Bed Chair Training and testing on Pix3D Both baselines underperform by a large margin. Metric Acc π 6 MedErr Acc π 6 MedErr Baseline-A Baseline-ZDDA Proposed Test on category instances not seen during training In practice impossible to have 3D models for all object instances. Our method shows robustness to unseen instances. Category Bed Chair Metric Acc π 6 MedErr Acc π 6 MedErr Baseline-A Baseline-ZDDA Proposed


22 G. Georgakis, S. Karanam, Z. Wu, J. Kosecka, Learning Local RGB-to-CAD Correspondences for Object Pose Estimation, ICCV




23 Limitation We wish to demonstrate how our method can be trained with any available auxiliary data. Problem: There no suitable large-scale datasets to train our method, without relying on annotations to align RGB and depth (for branches C,D). We collected limited number of quadruplet training examples from NYUv2 dataset and got poor performance. Metric Acc π 6 MedErr Bed A B C D Chair
24 Conclusion 3D object pose estimation framework which uses textureless 3D models and does not require explicit 3D annotations in RGB images. End-to-end formulation for discovering the keypoints through a relative pose estimation objective. Learning general representation that can be matched between RGB and depth images helps our model to generalize better to new datasets. 27
Classifying Manipulation Primitives from Visual Data
 Classifying Manipulation Primitives from Visual Data Sandy Huang and Dylan Hadfield-Menell Abstract One approach to learning from demonstrations in robotics is to make use of a classifier to predict if
Classifying Manipulation Primitives from Visual Data Sandy Huang and Dylan Hadfield-Menell Abstract One approach to learning from demonstrations in robotics is to make use of a classifier to predict if
Introduction to Computer Graphics
 Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 torsten@sfu.ca www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 torsten@sfu.ca www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Given a point cloud, polygon, or sampled parametric curve, we can use transformations for several purposes:
 3 3.1 2D Given a point cloud, polygon, or sampled parametric curve, we can use transformations for several purposes: 1. Change coordinate frames (world, window, viewport, device, etc). 2. Compose objects
3 3.1 2D Given a point cloud, polygon, or sampled parametric curve, we can use transformations for several purposes: 1. Change coordinate frames (world, window, viewport, device, etc). 2. Compose objects
On Motion of Robot End-Effector using the Curvature Theory of Timelike Ruled Surfaces with Timelike Directrix
 Malaysian Journal of Mathematical Sciences 8(2): 89-204 (204) MALAYSIAN JOURNAL OF MATHEMATICAL SCIENCES Journal homepage: http://einspem.upm.edu.my/journal On Motion of Robot End-Effector using the Curvature
Malaysian Journal of Mathematical Sciences 8(2): 89-204 (204) MALAYSIAN JOURNAL OF MATHEMATICAL SCIENCES Journal homepage: http://einspem.upm.edu.my/journal On Motion of Robot End-Effector using the Curvature
226-332 Basic CAD/CAM. CHAPTER 5: Geometric Transformation
 226-332 Basic CAD/CAM CHAPTER 5: Geometric Transformation 1 Geometric transformation is a change in geometric characteristics such as position, orientation, and size of a geometric entity (point, line,
226-332 Basic CAD/CAM CHAPTER 5: Geometric Transformation 1 Geometric transformation is a change in geometric characteristics such as position, orientation, and size of a geometric entity (point, line,
The Delicate Art of Flower Classification
 The Delicate Art of Flower Classification Paul Vicol Simon Fraser University University Burnaby, BC pvicol@sfu.ca Note: The following is my contribution to a group project for a graduate machine learning
The Delicate Art of Flower Classification Paul Vicol Simon Fraser University University Burnaby, BC pvicol@sfu.ca Note: The following is my contribution to a group project for a graduate machine learning
Metrics on SO(3) and Inverse Kinematics
 and Inverse Kinematics") Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Creating 2D Drawings from 3D AutoCAD Models
 Creating 2D Drawings from 3D AutoCAD Models David Piggott CrWare, LP GD205-2P This class explores the various techniques in creating 2D part and assembly drawings from 3D AutoCAD models. As part of the
Creating 2D Drawings from 3D AutoCAD Models David Piggott CrWare, LP GD205-2P This class explores the various techniques in creating 2D part and assembly drawings from 3D AutoCAD models. As part of the
Geometric Camera Parameters
 Geometric Camera Parameters What assumptions have we made so far? -All equations we have derived for far are written in the camera reference frames. -These equations are valid only when: () all distances
Geometric Camera Parameters What assumptions have we made so far? -All equations we have derived for far are written in the camera reference frames. -These equations are valid only when: () all distances
Geometry of Vectors. 1 Cartesian Coordinates. Carlo Tomasi
 Geometry of Vectors Carlo Tomasi This note explores the geometric meaning of norm, inner product, orthogonality, and projection for vectors. For vectors in three-dimensional space, we also examine the
Geometry of Vectors Carlo Tomasi This note explores the geometric meaning of norm, inner product, orthogonality, and projection for vectors. For vectors in three-dimensional space, we also examine the
w = COI EYE view direction vector u = w ( 010,, ) cross product with y-axis v = w u up vector
 cross product with y-axis v = w u up vector") . w COI EYE view direction vector u w ( 00,, ) cross product with -ais v w u up vector (EQ ) Computer Animation: Algorithms and Techniques 29 up vector view vector observer center of interest 30 Computer
. w COI EYE view direction vector u w ( 00,, ) cross product with -ais v w u up vector (EQ ) Computer Animation: Algorithms and Techniques 29 up vector view vector observer center of interest 30 Computer
Semantic Video Annotation by Mining Association Patterns from Visual and Speech Features
 Semantic Video Annotation by Mining Association Patterns from and Speech Features Vincent. S. Tseng, Ja-Hwung Su, Jhih-Hong Huang and Chih-Jen Chen Department of Computer Science and Information Engineering
Semantic Video Annotation by Mining Association Patterns from and Speech Features Vincent. S. Tseng, Ja-Hwung Su, Jhih-Hong Huang and Chih-Jen Chen Department of Computer Science and Information Engineering
Taking Inverse Graphics Seriously
 CSC2535: 2013 Advanced Machine Learning Taking Inverse Graphics Seriously Geoffrey Hinton Department of Computer Science University of Toronto The representation used by the neural nets that work best
CSC2535: 2013 Advanced Machine Learning Taking Inverse Graphics Seriously Geoffrey Hinton Department of Computer Science University of Toronto The representation used by the neural nets that work best
3D Tranformations. CS 4620 Lecture 6. Cornell CS4620 Fall 2013 Lecture 6. 2013 Steve Marschner (with previous instructors James/Bala)
") 3D Tranformations CS 4620 Lecture 6 1 Translation 2 Translation 2 Translation 2 Translation 2 Scaling 3 Scaling 3 Scaling 3 Scaling 3 Rotation about z axis 4 Rotation about z axis 4 Rotation about x axis
3D Tranformations CS 4620 Lecture 6 1 Translation 2 Translation 2 Translation 2 Translation 2 Scaling 3 Scaling 3 Scaling 3 Scaling 3 Rotation about z axis 4 Rotation about z axis 4 Rotation about x axis
Least-Squares Intersection of Lines
 Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
An introduction to 3D draughting & solid modelling using AutoCAD
 An introduction to 3D draughting & solid modelling using AutoCAD Faculty of Technology University of Plymouth Drake Circus Plymouth PL4 8AA These notes are to be used in conjunction with the AutoCAD software
An introduction to 3D draughting & solid modelling using AutoCAD Faculty of Technology University of Plymouth Drake Circus Plymouth PL4 8AA These notes are to be used in conjunction with the AutoCAD software
KINECT PROJECT EITAN BABCOCK REPORT TO RECEIVE FINAL EE CREDIT FALL 2013
 KINECT PROJECT EITAN BABCOCK REPORT TO RECEIVE FINAL EE CREDIT FALL 2013 CONTENTS Introduction... 1 Objective... 1 Procedure... 2 Converting Distance Array to 3D Array... 2 Transformation Matrices... 4
KINECT PROJECT EITAN BABCOCK REPORT TO RECEIVE FINAL EE CREDIT FALL 2013 CONTENTS Introduction... 1 Objective... 1 Procedure... 2 Converting Distance Array to 3D Array... 2 Transformation Matrices... 4
CS 534: Computer Vision 3D Model-based recognition
 CS 534: Computer Vision 3D Model-based recognition Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 High Level Vision Object Recognition: What it means? Two main recognition tasks:!
CS 534: Computer Vision 3D Model-based recognition Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 High Level Vision Object Recognition: What it means? Two main recognition tasks:!
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite
 Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
A. OPENING POINT CLOUDS. (Notepad++ Text editor) (Cloud Compare Point cloud and mesh editor) (MeshLab Point cloud and mesh editor)
 (Cloud Compare Point cloud and mesh editor) (MeshLab Point cloud and mesh editor)") MeshLAB tutorial 1 A. OPENING POINT CLOUDS (Notepad++ Text editor) (Cloud Compare Point cloud and mesh editor) (MeshLab Point cloud and mesh editor) 2 OPENING POINT CLOUDS IN NOTEPAD ++ Let us understand
MeshLAB tutorial 1 A. OPENING POINT CLOUDS (Notepad++ Text editor) (Cloud Compare Point cloud and mesh editor) (MeshLab Point cloud and mesh editor) 2 OPENING POINT CLOUDS IN NOTEPAD ++ Let us understand
3D U ser I t er aces and Augmented Reality
 3D User Interfaces and Augmented Reality Applications Mechanical CAD 3D Animation Virtual Environments Scientific Visualization Mechanical CAD Component design Assembly testingti Mechanical properties
3D User Interfaces and Augmented Reality Applications Mechanical CAD 3D Animation Virtual Environments Scientific Visualization Mechanical CAD Component design Assembly testingti Mechanical properties
CATIA Functional Tolerancing & Annotation TABLE OF CONTENTS
 TABLE OF CONTENTS Introduction...1 Functional Tolerancing and Annotation...2 Pull-down Menus...3 Insert...3 Functional Tolerancing and Annotation Workbench...4 Bottom Toolbar Changes...5 3D Grid Toolbar...5
TABLE OF CONTENTS Introduction...1 Functional Tolerancing and Annotation...2 Pull-down Menus...3 Insert...3 Functional Tolerancing and Annotation Workbench...4 Bottom Toolbar Changes...5 3D Grid Toolbar...5
2D Geometrical Transformations. Foley & Van Dam, Chapter 5
 2D Geometrical Transformations Fole & Van Dam, Chapter 5 2D Geometrical Transformations Translation Scaling Rotation Shear Matri notation Compositions Homogeneous coordinates 2D Geometrical Transformations
2D Geometrical Transformations Fole & Van Dam, Chapter 5 2D Geometrical Transformations Translation Scaling Rotation Shear Matri notation Compositions Homogeneous coordinates 2D Geometrical Transformations
Presents. AccuDraw. Instructor Pam Roberts pamroberts@cadassist.com www.cadassist.com
 Presents AccuDraw Instructor Pam Roberts pamroberts@cadassist.com www.cadassist.com ACCUDRAW AccuDraw gives user an easy way to input accurate points. By default with MicroStation V8 AccuDraw will automatically
Presents AccuDraw Instructor Pam Roberts pamroberts@cadassist.com www.cadassist.com ACCUDRAW AccuDraw gives user an easy way to input accurate points. By default with MicroStation V8 AccuDraw will automatically
Edge-based Template Matching and Tracking for Perspectively Distorted Planar Objects
 Edge-based Template Matching and Tracking for Perspectively Distorted Planar Objects Andreas Hofhauser, Carsten Steger, and Nassir Navab TU München, Boltzmannstr. 3, 85748 Garching bei München, Germany
Edge-based Template Matching and Tracking for Perspectively Distorted Planar Objects Andreas Hofhauser, Carsten Steger, and Nassir Navab TU München, Boltzmannstr. 3, 85748 Garching bei München, Germany
Removing Moving Objects from Point Cloud Scenes
 1 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky klitomis@cs.ucr.edu Abstract. Three-dimensional simultaneous localization and mapping is a topic of significant interest in the research
1 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky klitomis@cs.ucr.edu Abstract. Three-dimensional simultaneous localization and mapping is a topic of significant interest in the research
Big Ideas in Mathematics
 Big Ideas in Mathematics which are important to all mathematics learning. (Adapted from the NCTM Curriculum Focal Points, 2006) The Mathematics Big Ideas are organized using the PA Mathematics Standards
Big Ideas in Mathematics which are important to all mathematics learning. (Adapted from the NCTM Curriculum Focal Points, 2006) The Mathematics Big Ideas are organized using the PA Mathematics Standards
Lecture 6: CNNs for Detection, Tracking, and Segmentation Object Detection
 CSED703R: Deep Learning for Visual Recognition (206S) Lecture 6: CNNs for Detection, Tracking, and Segmentation Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 3 Object detection
CSED703R: Deep Learning for Visual Recognition (206S) Lecture 6: CNNs for Detection, Tracking, and Segmentation Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 3 Object detection
3D Drawing. Single Point Perspective with Diminishing Spaces
 3D Drawing Single Point Perspective with Diminishing Spaces The following document helps describe the basic process for generating a 3D representation of a simple 2D plan. For this exercise we will be
3D Drawing Single Point Perspective with Diminishing Spaces The following document helps describe the basic process for generating a 3D representation of a simple 2D plan. For this exercise we will be
technical notes trimble realworks software
 technical notes trimble realworks software A POWERFUL 3D LASER SCANNING OFFICE SOFTWARE SUITE Designed for today s multifaceted scanning professional, Trimble RealWorks is a powerful office software that
technical notes trimble realworks software A POWERFUL 3D LASER SCANNING OFFICE SOFTWARE SUITE Designed for today s multifaceted scanning professional, Trimble RealWorks is a powerful office software that
3D Model based Object Class Detection in An Arbitrary View
 3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
Trimble Realworks Software
 TECHNICAL NOTES Trimble Realworks Software A Powerful 3D Laser Scanning Office Software Suite DESIGNED FOR TODAY S MULTIFACETED SCANNING PROFESSIONAL, TRIMBLE REALWORKS IS A POWERFUL OFFICE SOFTWARE THAT
TECHNICAL NOTES Trimble Realworks Software A Powerful 3D Laser Scanning Office Software Suite DESIGNED FOR TODAY S MULTIFACETED SCANNING PROFESSIONAL, TRIMBLE REALWORKS IS A POWERFUL OFFICE SOFTWARE THAT
Essential Mathematics for Computer Graphics fast
 John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
Affine Transformations
 A P P E N D I X C Affine Transformations CONTENTS C The need for geometric transformations 335 C2 Affine transformations 336 C3 Matri representation of the linear transformations 338 C4 Homogeneous coordinates
A P P E N D I X C Affine Transformations CONTENTS C The need for geometric transformations 335 C2 Affine transformations 336 C3 Matri representation of the linear transformations 338 C4 Homogeneous coordinates
Classification of Fingerprints. Sarat C. Dass Department of Statistics & Probability
 Classification of Fingerprints Sarat C. Dass Department of Statistics & Probability Fingerprint Classification Fingerprint classification is a coarse level partitioning of a fingerprint database into smaller
Classification of Fingerprints Sarat C. Dass Department of Statistics & Probability Fingerprint Classification Fingerprint classification is a coarse level partitioning of a fingerprint database into smaller
3D Drawing. Single Point Perspective with Diminishing Spaces
 3D Drawing Single Point Perspective with Diminishing Spaces The following document helps describe the basic process for generating a 3D representation of a simple 2D plan. For this exercise we will be
3D Drawing Single Point Perspective with Diminishing Spaces The following document helps describe the basic process for generating a 3D representation of a simple 2D plan. For this exercise we will be
Solving Simultaneous Equations and Matrices
 Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Assessment. Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall
 Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
GEOGRAPHIC INFORMATION SYSTEMS CERTIFICATION
 GEOGRAPHIC INFORMATION SYSTEMS CERTIFICATION GIS Syllabus - Version 1.2 January 2007 Copyright AICA-CEPIS 2009 1 Version 1 January 2007 GIS Certification Programme 1. Target The GIS certification is aimed
GEOGRAPHIC INFORMATION SYSTEMS CERTIFICATION GIS Syllabus - Version 1.2 January 2007 Copyright AICA-CEPIS 2009 1 Version 1 January 2007 GIS Certification Programme 1. Target The GIS certification is aimed
The Scientific Data Mining Process
 Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Structural Axial, Shear and Bending Moments
 Structural Axial, Shear and Bending Moments Positive Internal Forces Acting Recall from mechanics of materials that the internal forces P (generic axial), V (shear) and M (moment) represent resultants
Structural Axial, Shear and Bending Moments Positive Internal Forces Acting Recall from mechanics of materials that the internal forces P (generic axial), V (shear) and M (moment) represent resultants
Quaternions. Jason Lawrence CS445: Graphics. Acknowledgment: slides by Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein and David Dobkin
 Jason Lawrence CS445: Graphics Acknowledgment: slides by Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein and David Dobkin Overview Cross Products and (Skew) Symmetric Matrices Quaternions
Jason Lawrence CS445: Graphics Acknowledgment: slides by Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein and David Dobkin Overview Cross Products and (Skew) Symmetric Matrices Quaternions
Aligning 3D Models to RGB-D Images of Cluttered Scenes
 Aligning 3D Models to RGB-D Images of Cluttered Scenes Saurabh Gupta Pablo Arbeláez Ross Girshick Jitendra Malik UC Berkeley Universidad de los Andes, Colombia Microsoft Research UC Berkeley sgupta@ pa.arbelaez@
Aligning 3D Models to RGB-D Images of Cluttered Scenes Saurabh Gupta Pablo Arbeláez Ross Girshick Jitendra Malik UC Berkeley Universidad de los Andes, Colombia Microsoft Research UC Berkeley sgupta@ pa.arbelaez@
3D Building Roof Extraction From LiDAR Data
 3D Building Roof Extraction From LiDAR Data Amit A. Kokje Susan Jones NSG- NZ Outline LiDAR: Basics LiDAR Feature Extraction (Features and Limitations) LiDAR Roof extraction (Workflow, parameters, results)
3D Building Roof Extraction From LiDAR Data Amit A. Kokje Susan Jones NSG- NZ Outline LiDAR: Basics LiDAR Feature Extraction (Features and Limitations) LiDAR Roof extraction (Workflow, parameters, results)
multimodality image processing workstation Visualizing your SPECT-CT-PET-MRI images
 multimodality image processing workstation Visualizing your SPECT-CT-PET-MRI images InterView FUSION InterView FUSION is a new visualization and evaluation software developed by Mediso built on state of
multimodality image processing workstation Visualizing your SPECT-CT-PET-MRI images InterView FUSION InterView FUSION is a new visualization and evaluation software developed by Mediso built on state of
Rotation and Inter interpolation Using Quaternion Representation
 This week CENG 732 Computer Animation Spring 2006-2007 Week 2 Technical Preliminaries and Introduction to Keframing Recap from CEng 477 The Displa Pipeline Basic Transformations / Composite Transformations
This week CENG 732 Computer Animation Spring 2006-2007 Week 2 Technical Preliminaries and Introduction to Keframing Recap from CEng 477 The Displa Pipeline Basic Transformations / Composite Transformations
Knowledge Discovery from patents using KMX Text Analytics
 Knowledge Discovery from patents using KMX Text Analytics Dr. Anton Heijs anton.heijs@treparel.com Treparel Abstract In this white paper we discuss how the KMX technology of Treparel can help searchers
Knowledge Discovery from patents using KMX Text Analytics Dr. Anton Heijs anton.heijs@treparel.com Treparel Abstract In this white paper we discuss how the KMX technology of Treparel can help searchers
Applications of Deep Learning to the GEOINT mission. June 2015
 Applications of Deep Learning to the GEOINT mission June 2015 Overview Motivation Deep Learning Recap GEOINT applications: Imagery exploitation OSINT exploitation Geospatial and activity based analytics
Applications of Deep Learning to the GEOINT mission June 2015 Overview Motivation Deep Learning Recap GEOINT applications: Imagery exploitation OSINT exploitation Geospatial and activity based analytics
Discovering Math: Exploring Geometry Teacher s Guide
 Teacher s Guide Grade Level: 6 8 Curriculum Focus: Mathematics Lesson Duration: Three class periods Program Description Discovering Math: Exploring Geometry From methods of geometric construction and threedimensional
Teacher s Guide Grade Level: 6 8 Curriculum Focus: Mathematics Lesson Duration: Three class periods Program Description Discovering Math: Exploring Geometry From methods of geometric construction and threedimensional
Solution Guide III-C. 3D Vision. Building Vision for Business. MVTec Software GmbH
 Solution Guide III-C 3D Vision MVTec Software GmbH Building Vision for Business Machine vision in 3D world coordinates, Version 10.0.4 All rights reserved. No part of this publication may be reproduced,
Solution Guide III-C 3D Vision MVTec Software GmbH Building Vision for Business Machine vision in 3D world coordinates, Version 10.0.4 All rights reserved. No part of this publication may be reproduced,
2D Geometric Transformations
 2D Geometric Transformations (Chapter 5 in FVD) 2D Geometric Transformations Question: How do we represent a geometric object in the plane? Answer: For now, assume that objects consist of points and lines.
2D Geometric Transformations (Chapter 5 in FVD) 2D Geometric Transformations Question: How do we represent a geometric object in the plane? Answer: For now, assume that objects consist of points and lines.
Math for Game Programmers: Dual Numbers. Gino van den Bergen gino@dtecta.com
 Math for Game Programmers: Dual Numbers Gino van den Bergen gino@dtecta.com Introduction Dual numbers extend real numbers, similar to complex numbers. Complex numbers adjoin an element i, for which i 2
Math for Game Programmers: Dual Numbers Gino van den Bergen gino@dtecta.com Introduction Dual numbers extend real numbers, similar to complex numbers. Complex numbers adjoin an element i, for which i 2
Bachelor of Games and Virtual Worlds (Programming) Subject and Course Summaries
 Subject and Course Summaries") First Semester Development 1A On completion of this subject students will be able to apply basic programming and problem solving skills in a 3 rd generation object-oriented programming language (such as
First Semester Development 1A On completion of this subject students will be able to apply basic programming and problem solving skills in a 3 rd generation object-oriented programming language (such as
Polarized 3D. Achuta Kadambi, MIT Media Lab. Joint work with Vahe Taamazyan, Boxin Shi, and Ramesh Raskar. MIT Media Lab 2
 Polarized 3D Achuta Kadambi, MIT Media Lab Joint work with Vahe Taamazyan, Boxin Shi, and Ramesh Raskar MIT Media Lab 2 MIT Media Lab 3 Microsoft Kinect v2 MIT Media Lab 4 Microsoft Kinect v2 MIT Media
Polarized 3D Achuta Kadambi, MIT Media Lab Joint work with Vahe Taamazyan, Boxin Shi, and Ramesh Raskar MIT Media Lab 2 MIT Media Lab 3 Microsoft Kinect v2 MIT Media Lab 4 Microsoft Kinect v2 MIT Media
Applications of Dynamic Representation Technologies in Multimedia Electronic Map
 Applications of Dynamic Representation Technologies in Multimedia Electronic Map WU Guofeng CAI Zhongliang DU Qingyun LONG Yi (School of Resources and Environment Science, Wuhan University, Wuhan, Hubei.
Applications of Dynamic Representation Technologies in Multimedia Electronic Map WU Guofeng CAI Zhongliang DU Qingyun LONG Yi (School of Resources and Environment Science, Wuhan University, Wuhan, Hubei.
Multi-View Object Class Detection with a 3D Geometric Model
 Multi-View Object Class Detection with a 3D Geometric Model Joerg Liebelt IW-SI, EADS Innovation Works D-81663 Munich, Germany joerg.liebelt@eads.net Cordelia Schmid LEAR, INRIA Grenoble F-38330 Montbonnot,
Multi-View Object Class Detection with a 3D Geometric Model Joerg Liebelt IW-SI, EADS Innovation Works D-81663 Munich, Germany joerg.liebelt@eads.net Cordelia Schmid LEAR, INRIA Grenoble F-38330 Montbonnot,
Template-based Eye and Mouth Detection for 3D Video Conferencing
 Template-based Eye and Mouth Detection for 3D Video Conferencing Jürgen Rurainsky and Peter Eisert Fraunhofer Institute for Telecommunications - Heinrich-Hertz-Institute, Image Processing Department, Einsteinufer
Template-based Eye and Mouth Detection for 3D Video Conferencing Jürgen Rurainsky and Peter Eisert Fraunhofer Institute for Telecommunications - Heinrich-Hertz-Institute, Image Processing Department, Einsteinufer
A PAIR OF MEASURES OF ROTATIONAL ERROR FOR AXISYMMETRIC ROBOT END-EFFECTORS
 A PAIR OF MEASURES OF ROTATIONAL ERROR FOR AXISYMMETRIC ROBOT END-EFFECTORS Sébastien Briot, Ilian A. Bonev Department of Automated Manufacturing Engineering École de technologie supérieure (ÉTS), Montreal,
A PAIR OF MEASURES OF ROTATIONAL ERROR FOR AXISYMMETRIC ROBOT END-EFFECTORS Sébastien Briot, Ilian A. Bonev Department of Automated Manufacturing Engineering École de technologie supérieure (ÉTS), Montreal,
Learning outcomes. Knowledge and understanding. Competence and skills
 Syllabus Master s Programme in Statistics and Data Mining 120 ECTS Credits Aim The rapid growth of databases provides scientists and business people with vast new resources. This programme meets the challenges
Syllabus Master s Programme in Statistics and Data Mining 120 ECTS Credits Aim The rapid growth of databases provides scientists and business people with vast new resources. This programme meets the challenges
Detecting falls and poses in image silhouettes
 Detecting falls and poses in image silhouettes Master s thesis in Complex Adaptive Systems NIKLAS SCHRÄDER Department of Applied Mechanics Division of Vehicle Engineering and Autonomous Systems CHALMERS
Detecting falls and poses in image silhouettes Master s thesis in Complex Adaptive Systems NIKLAS SCHRÄDER Department of Applied Mechanics Division of Vehicle Engineering and Autonomous Systems CHALMERS
TWO-DIMENSIONAL TRANSFORMATION
 CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
VIRTUAL TRIAL ROOM USING AUGMENTED REALITY
 VIRTUAL TRIAL ROOM USING AUGMENTED REALITY Shreya Kamani, Neel Vasa, Kriti Srivastava, D. J. Sanghvi College of Engineering, Mumbai 53 Abstract This paper presents a Virtual Trial Room application using
VIRTUAL TRIAL ROOM USING AUGMENTED REALITY Shreya Kamani, Neel Vasa, Kriti Srivastava, D. J. Sanghvi College of Engineering, Mumbai 53 Abstract This paper presents a Virtual Trial Room application using
An Overview of ASME Y14.41 2003
 An Overview of ASME Y14.41 2003 August 5, 2003 Alex Krulikowski 1 Introduction Alex Krulikowski Manager of Standards and GD&T COE Embedded GD&T implementation project at GM Powertrain Chair of ASME Y14.41
An Overview of ASME Y14.41 2003 August 5, 2003 Alex Krulikowski 1 Introduction Alex Krulikowski Manager of Standards and GD&T COE Embedded GD&T implementation project at GM Powertrain Chair of ASME Y14.41
Onboard electronics of UAVs
 AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
How To Draw In Autocad
 DXF Import and Export for EASE 4.0 Page 1 of 9 DXF Import and Export for EASE 4.0 Bruce C. Olson, Dr. Waldemar Richert ADA Copyright 2002 Acoustic Design Ahnert EASE 4.0 allows both the import and export
DXF Import and Export for EASE 4.0 Page 1 of 9 DXF Import and Export for EASE 4.0 Bruce C. Olson, Dr. Waldemar Richert ADA Copyright 2002 Acoustic Design Ahnert EASE 4.0 allows both the import and export
Universidad de Cantabria Departamento de Tecnología Electrónica, Ingeniería de Sistemas y Automática. Tesis Doctoral
 Universidad de Cantabria Departamento de Tecnología Electrónica, Ingeniería de Sistemas y Automática Tesis Doctoral CONTRIBUCIONES AL ALINEAMIENTO DE NUBES DE PUNTOS 3D PARA SU USO EN APLICACIONES DE CAPTURA
Universidad de Cantabria Departamento de Tecnología Electrónica, Ingeniería de Sistemas y Automática Tesis Doctoral CONTRIBUCIONES AL ALINEAMIENTO DE NUBES DE PUNTOS 3D PARA SU USO EN APLICACIONES DE CAPTURA
Marr Revisited: 2D-3D Alignment via Surface Normal Prediction
 Marr Revisited: 2D-3D Alignment via Surface Normal Prediction Aayush Bansal Bryan Russell2 Abhinav Gupta Carnegie Mellon University 2 Adobe Research http://www.cs.cmu.edu/ aayushb/marrrevisited/ Input&Image&
Marr Revisited: 2D-3D Alignment via Surface Normal Prediction Aayush Bansal Bryan Russell2 Abhinav Gupta Carnegie Mellon University 2 Adobe Research http://www.cs.cmu.edu/ aayushb/marrrevisited/ Input&Image&
Rotation Matrices and Homogeneous Transformations
 Rotation Matrices and Homogeneous Transformations A coordinate frame in an n-dimensional space is defined by n mutually orthogonal unit vectors. In particular, for a two-dimensional (2D) space, i.e., n
Rotation Matrices and Homogeneous Transformations A coordinate frame in an n-dimensional space is defined by n mutually orthogonal unit vectors. In particular, for a two-dimensional (2D) space, i.e., n
CHAPTER 1 INTRODUCTION
 1 CHAPTER 1 INTRODUCTION Exploration is a process of discovery. In the database exploration process, an analyst executes a sequence of transformations over a collection of data structures to discover useful
1 CHAPTER 1 INTRODUCTION Exploration is a process of discovery. In the database exploration process, an analyst executes a sequence of transformations over a collection of data structures to discover useful
Assessment Anchors and Eligible Content
 M07.A-N The Number System M07.A-N.1 M07.A-N.1.1 DESCRIPTOR Assessment Anchors and Eligible Content Aligned to the Grade 7 Pennsylvania Core Standards Reporting Category Apply and extend previous understandings
M07.A-N The Number System M07.A-N.1 M07.A-N.1.1 DESCRIPTOR Assessment Anchors and Eligible Content Aligned to the Grade 7 Pennsylvania Core Standards Reporting Category Apply and extend previous understandings
Pro/INTRALINK 9.0/9.1 Curriculum Guide
 Pro/INTRALINK 9.0/9.1 Curriculum Guide NOTE: For a graphical depiction of the curriculum based on job role, please visit this page: http://www.ptc.com/services/edserv/learning/paths/ptc/proi_90.htm Web
Pro/INTRALINK 9.0/9.1 Curriculum Guide NOTE: For a graphical depiction of the curriculum based on job role, please visit this page: http://www.ptc.com/services/edserv/learning/paths/ptc/proi_90.htm Web
Lecture 7. Matthew T. Mason. Mechanics of Manipulation. Lecture 7. Representing Rotation. Kinematic representation: goals, overview
 Matthew T. Mason Mechanics of Manipulation Today s outline Readings, etc. We are starting chapter 3 of the text Lots of stuff online on representing rotations Murray, Li, and Sastry for matrix exponential
Matthew T. Mason Mechanics of Manipulation Today s outline Readings, etc. We are starting chapter 3 of the text Lots of stuff online on representing rotations Murray, Li, and Sastry for matrix exponential
PHYSIOLOGICALLY-BASED DETECTION OF COMPUTER GENERATED FACES IN VIDEO
 PHYSIOLOGICALLY-BASED DETECTION OF COMPUTER GENERATED FACES IN VIDEO V. Conotter, E. Bodnari, G. Boato H. Farid Department of Information Engineering and Computer Science University of Trento, Trento (ITALY)
PHYSIOLOGICALLY-BASED DETECTION OF COMPUTER GENERATED FACES IN VIDEO V. Conotter, E. Bodnari, G. Boato H. Farid Department of Information Engineering and Computer Science University of Trento, Trento (ITALY)
Technical What s New. Autodesk Alias Product Line
 Autodesk Alias Product Line Purpose-built for industrial designers and creative professionals, digital modelers/sculptors, and automotive/transportation designers, the Autodesk Alias 2010 product line
Autodesk Alias Product Line Purpose-built for industrial designers and creative professionals, digital modelers/sculptors, and automotive/transportation designers, the Autodesk Alias 2010 product line
Clustering Connectionist and Statistical Language Processing
 Clustering Connectionist and Statistical Language Processing Frank Keller keller@coli.uni-sb.de Computerlinguistik Universität des Saarlandes Clustering p.1/21 Overview clustering vs. classification supervised
Clustering Connectionist and Statistical Language Processing Frank Keller keller@coli.uni-sb.de Computerlinguistik Universität des Saarlandes Clustering p.1/21 Overview clustering vs. classification supervised
Copyright 2011 Casa Software Ltd. www.casaxps.com. Centre of Mass
 Centre of Mass A central theme in mathematical modelling is that of reducing complex problems to simpler, and hopefully, equivalent problems for which mathematical analysis is possible. The concept of
Centre of Mass A central theme in mathematical modelling is that of reducing complex problems to simpler, and hopefully, equivalent problems for which mathematical analysis is possible. The concept of
Matrix Calculations: Applications of Eigenvalues and Eigenvectors; Inner Products
 Matrix Calculations: Applications of Eigenvalues and Eigenvectors; Inner Products H. Geuvers Institute for Computing and Information Sciences Intelligent Systems Version: spring 2015 H. Geuvers Version:
Matrix Calculations: Applications of Eigenvalues and Eigenvectors; Inner Products H. Geuvers Institute for Computing and Information Sciences Intelligent Systems Version: spring 2015 H. Geuvers Version:
Journal of Industrial Engineering Research. Adaptive sequence of Key Pose Detection for Human Action Recognition
 IWNEST PUBLISHER Journal of Industrial Engineering Research (ISSN: 2077-4559) Journal home page: http://www.iwnest.com/aace/ Adaptive sequence of Key Pose Detection for Human Action Recognition 1 T. Sindhu
IWNEST PUBLISHER Journal of Industrial Engineering Research (ISSN: 2077-4559) Journal home page: http://www.iwnest.com/aace/ Adaptive sequence of Key Pose Detection for Human Action Recognition 1 T. Sindhu
Problem of the Month: Cutting a Cube
 Problem of the Month: The Problems of the Month (POM) are used in a variety of ways to promote problem solving and to foster the first standard of mathematical practice from the Common Core State Standards:
Problem of the Month: The Problems of the Month (POM) are used in a variety of ways to promote problem solving and to foster the first standard of mathematical practice from the Common Core State Standards:
Greedy Routing on Hidden Metric Spaces as a Foundation of Scalable Routing Architectures
 Greedy Routing on Hidden Metric Spaces as a Foundation of Scalable Routing Architectures Dmitri Krioukov, kc claffy, and Kevin Fall CAIDA/UCSD, and Intel Research, Berkeley Problem High-level Routing is
Greedy Routing on Hidden Metric Spaces as a Foundation of Scalable Routing Architectures Dmitri Krioukov, kc claffy, and Kevin Fall CAIDA/UCSD, and Intel Research, Berkeley Problem High-level Routing is
Two hours UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE. M.Sc. in Advanced Computer Science. Friday 18 th January 2008.
 COMP60321 Two hours UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE M.Sc. in Advanced Computer Science Computer Animation Friday 18 th January 2008 Time: 09:45 11:45 Please answer any THREE Questions
COMP60321 Two hours UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE M.Sc. in Advanced Computer Science Computer Animation Friday 18 th January 2008 Time: 09:45 11:45 Please answer any THREE Questions
SYMMETRIC EIGENFACES MILI I. SHAH
 SYMMETRIC EIGENFACES MILI I. SHAH Abstract. Over the years, mathematicians and computer scientists have produced an extensive body of work in the area of facial analysis. Several facial analysis algorithms
SYMMETRIC EIGENFACES MILI I. SHAH Abstract. Over the years, mathematicians and computer scientists have produced an extensive body of work in the area of facial analysis. Several facial analysis algorithms
Probabilistic Latent Semantic Analysis (plsa)
") Probabilistic Latent Semantic Analysis (plsa) SS 2008 Bayesian Networks Multimedia Computing, Universität Augsburg Rainer.Lienhart@informatik.uni-augsburg.de www.multimedia-computing.{de,org} References
Probabilistic Latent Semantic Analysis (plsa) SS 2008 Bayesian Networks Multimedia Computing, Universität Augsburg Rainer.Lienhart@informatik.uni-augsburg.de www.multimedia-computing.{de,org} References
Pedestrian Detection with RCNN
 Pedestrian Detection with RCNN Matthew Chen Department of Computer Science Stanford University mcc17@stanford.edu Abstract In this paper we evaluate the effectiveness of using a Region-based Convolutional
Pedestrian Detection with RCNN Matthew Chen Department of Computer Science Stanford University mcc17@stanford.edu Abstract In this paper we evaluate the effectiveness of using a Region-based Convolutional
Epipolar Geometry and Visual Servoing
 Epipolar Geometry and Visual Servoing Domenico Prattichizzo joint with with Gian Luca Mariottini and Jacopo Piazzi www.dii.unisi.it/prattichizzo Robotics & Systems Lab University of Siena, Italy Scuoladi
Epipolar Geometry and Visual Servoing Domenico Prattichizzo joint with with Gian Luca Mariottini and Jacopo Piazzi www.dii.unisi.it/prattichizzo Robotics & Systems Lab University of Siena, Italy Scuoladi
Design and Fabrication by Example
 To appear in ACM TOG 4(33). Design and Fabrication by Example Adriana Schulz1 Ariel Shamir2 David I. W. Levin1 Pitchaya Sitthi-amorn1 Wojciech Matusik1 1 Massachusetts Institute of Technology 2 The Interdisciplinary
To appear in ACM TOG 4(33). Design and Fabrication by Example Adriana Schulz1 Ariel Shamir2 David I. W. Levin1 Pitchaya Sitthi-amorn1 Wojciech Matusik1 1 Massachusetts Institute of Technology 2 The Interdisciplinary
animation animation shape specification as a function of time
 animation animation shape specification as a function of time animation representation many ways to represent changes with time intent artistic motion physically-plausible motion efficiency control typically
animation animation shape specification as a function of time animation representation many ways to represent changes with time intent artistic motion physically-plausible motion efficiency control typically
Animations in Creo 3.0
 Animations in Creo 3.0 ME170 Part I. Introduction & Outline Animations provide useful demonstrations and analyses of a mechanism's motion. This document will present two ways to create a motion animation
Animations in Creo 3.0 ME170 Part I. Introduction & Outline Animations provide useful demonstrations and analyses of a mechanism's motion. This document will present two ways to create a motion animation
Local features and matching. Image classification & object localization
 Overview Instance level search Local features and matching Efficient visual recognition Image classification & object localization Category recognition Image classification: assigning a class label to
Overview Instance level search Local features and matching Efficient visual recognition Image classification & object localization Category recognition Image classification: assigning a class label to
Interactive Segmentation, Tracking, and Kinematic Modeling of Unknown 3D Articulated Objects
 Interactive Segmentation, Tracking, and Kinematic Modeling of Unknown 3D Articulated Objects Dov Katz, Moslem Kazemi, J. Andrew Bagnell and Anthony Stentz 1 Abstract We present an interactive perceptual
Interactive Segmentation, Tracking, and Kinematic Modeling of Unknown 3D Articulated Objects Dov Katz, Moslem Kazemi, J. Andrew Bagnell and Anthony Stentz 1 Abstract We present an interactive perceptual
HAND GESTURE BASEDOPERATINGSYSTEM CONTROL
 HAND GESTURE BASEDOPERATINGSYSTEM CONTROL Garkal Bramhraj 1, palve Atul 2, Ghule Supriya 3, Misal sonali 4 1 Garkal Bramhraj mahadeo, 2 Palve Atule Vasant, 3 Ghule Supriya Shivram, 4 Misal Sonali Babasaheb,
HAND GESTURE BASEDOPERATINGSYSTEM CONTROL Garkal Bramhraj 1, palve Atul 2, Ghule Supriya 3, Misal sonali 4 1 Garkal Bramhraj mahadeo, 2 Palve Atule Vasant, 3 Ghule Supriya Shivram, 4 Misal Sonali Babasaheb,
Optical Flow. Shenlong Wang CSC2541 Course Presentation Feb 2, 2016
 Optical Flow Shenlong Wang CSC2541 Course Presentation Feb 2, 2016 Outline Introduction Variation Models Feature Matching Methods End-to-end Learning based Methods Discussion Optical Flow Goal: Pixel motion
Optical Flow Shenlong Wang CSC2541 Course Presentation Feb 2, 2016 Outline Introduction Variation Models Feature Matching Methods End-to-end Learning based Methods Discussion Optical Flow Goal: Pixel motion
2003-2012 MVTec Software GmbH.
 1 MVTec Software GmbH is a leading international manufacturer of software for machine vision used in all demanding areas of imaging: semi-conductor industry, web inspection, quality control and inspection
1 MVTec Software GmbH is a leading international manufacturer of software for machine vision used in all demanding areas of imaging: semi-conductor industry, web inspection, quality control and inspection
Current Standard: Mathematical Concepts and Applications Shape, Space, and Measurement- Primary
 Shape, Space, and Measurement- Primary A student shall apply concepts of shape, space, and measurement to solve problems involving two- and three-dimensional shapes by demonstrating an understanding of:
Shape, Space, and Measurement- Primary A student shall apply concepts of shape, space, and measurement to solve problems involving two- and three-dimensional shapes by demonstrating an understanding of:
CATIA Electrical Harness Design TABLE OF CONTENTS
 TABLE OF CONTENTS Introduction...1 Electrical Harness Design...2 Electrical Harness Assembly Workbench...4 Bottom Toolbar...5 Measure...5 Electrical Harness Design...7 Defining Geometric Bundles...7 Installing
TABLE OF CONTENTS Introduction...1 Electrical Harness Design...2 Electrical Harness Assembly Workbench...4 Bottom Toolbar...5 Measure...5 Electrical Harness Design...7 Defining Geometric Bundles...7 Installing
How To Analyze Ball Blur On A Ball Image
 Single Image 3D Reconstruction of Ball Motion and Spin From Motion Blur An Experiment in Motion from Blur Giacomo Boracchi, Vincenzo Caglioti, Alessandro Giusti Objective From a single image, reconstruct:
Single Image 3D Reconstruction of Ball Motion and Spin From Motion Blur An Experiment in Motion from Blur Giacomo Boracchi, Vincenzo Caglioti, Alessandro Giusti Objective From a single image, reconstruct:
Geometric Transformations Grade Four
 Ohio Standards Connection Geometry and Spatial Sense Benchmark I Describe, identify and model reflections, rotations and translations, using physical materials. Indicator 7 Identify, describe and use reflections
Ohio Standards Connection Geometry and Spatial Sense Benchmark I Describe, identify and model reflections, rotations and translations, using physical materials. Indicator 7 Identify, describe and use reflections
December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B. KITCHENS
 December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B KITCHENS The equation 1 Lines in two-dimensional space (1) 2x y = 3 describes a line in two-dimensional space The coefficients of x and y in the equation
December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B KITCHENS The equation 1 Lines in two-dimensional space (1) 2x y = 3 describes a line in two-dimensional space The coefficients of x and y in the equation
DATA VISUALIZATION GABRIEL PARODI STUDY MATERIAL: PRINCIPLES OF GEOGRAPHIC INFORMATION SYSTEMS AN INTRODUCTORY TEXTBOOK CHAPTER 7
 DATA VISUALIZATION GABRIEL PARODI STUDY MATERIAL: PRINCIPLES OF GEOGRAPHIC INFORMATION SYSTEMS AN INTRODUCTORY TEXTBOOK CHAPTER 7 Contents GIS and maps The visualization process Visualization and strategies
DATA VISUALIZATION GABRIEL PARODI STUDY MATERIAL: PRINCIPLES OF GEOGRAPHIC INFORMATION SYSTEMS AN INTRODUCTORY TEXTBOOK CHAPTER 7 Contents GIS and maps The visualization process Visualization and strategies
Cloud screening and quality control algorithms for the AERONET. database
 Cloud screening and quality control algorithms for the AERONET database Automatic globally distributed networks for monitoring aerosol optical depth provide measurements of natural and anthropogenic aerosol
Cloud screening and quality control algorithms for the AERONET database Automatic globally distributed networks for monitoring aerosol optical depth provide measurements of natural and anthropogenic aerosol