5. GEOMETRIC MODELING
|
|
|
- Hilda Nicholson
- 7 years ago
- Views:
Transcription
1 5. GEOMETRIC MODELING Types of Curves and Their Mathematical Representation Types of Surfaces and Their Mathematical Representation Types of Solids and Their Mathematical Representation CAD/CAM Data Exchange

2 TYPES OF CURVES AND THEIR MATHEMATICAL REPRESENTATIONS Wireframe Model ( 2D in 1960s for drafting, 3D in 1970s) Wireframe Entities analytic entities (points, lines, arcs and circles, fillets and chamfers, and conics synthetic entities (splines and Bezier curves) methods of defining points: P(x,y,z), P(r,,z), P(x+x,y+y,z+z),, end points of existing entity, center point, intersection of two entities. methods of defining lines: between two points, parallel to axis, parallel or perpendicular to a line, tangent to entity methods of defining arcs and circles: center and radius, three points, center and a point, a radius and tangent to a line passing through a point. methods of defining ellipses and parabolas: ellipse (center and axes lengths, four points, two conjugate diameters), parabola (vertex and focus, three points). methods of defining synthetic curves: cubic spline (a set of data points and end slopes), Bezier curves (a set of data points), B-spline curves (interpolate a set of data points with local control possible).

3 Curve Representation: Two types of representation are parametric and non-parametric representation. In parametric representation all variables (i.e., coordinates) are expressed in terms of common parameters. For example, a point can be expressed with respect to a parameter as P( u) [ x( u), y( u), z( u)], u u u min max Non-parametric representation is the conventional representation as P [ x, y( x), z( x)] Ex. Non-parametric form of a circle: x^2+y^2=r^2, parametric form: P(u)=[r cos 2u, r sin 2u], 0u1. This form can be used to find slopes at a certain angle for example.
![For example, a point can be expressed with respect to a parameter as P( u) [ x( u), y( u), z( u)], u u u min max Non-parametric representation](/docs-images/41/22585261/images/page_3.jpg "is the conventional representation as P [ x, y( x), z( x)] Ex.")
4 PARAMETRIC REPRESENTATION OF ANALYTIC CURVES The following list shows most of the analytic curve that are used in CAD/CAM system for part design and modeling. Lines Circles Ellipses Parabolas Hyperbolas Conic Curves

5 LINE AND CIRCLE A line between two points P 1 and P 2 can be expressed with respect to a parameter. P P u( P 1 ) 1 2 P A circle for a center and the radius can be written as x x y y z z c c c R cosu R sin u, 0 u 2

6 ELLIPSE An ellipse with a center and major and minor axes of 2A and 2B can be expressed as. x y z x y z c c c Acosu B sin u, 0 u 2

7 PARABOLA

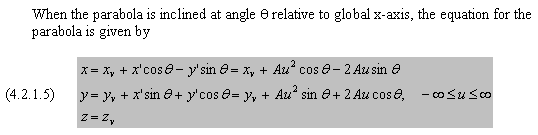
8

9 EXAMPLE 1

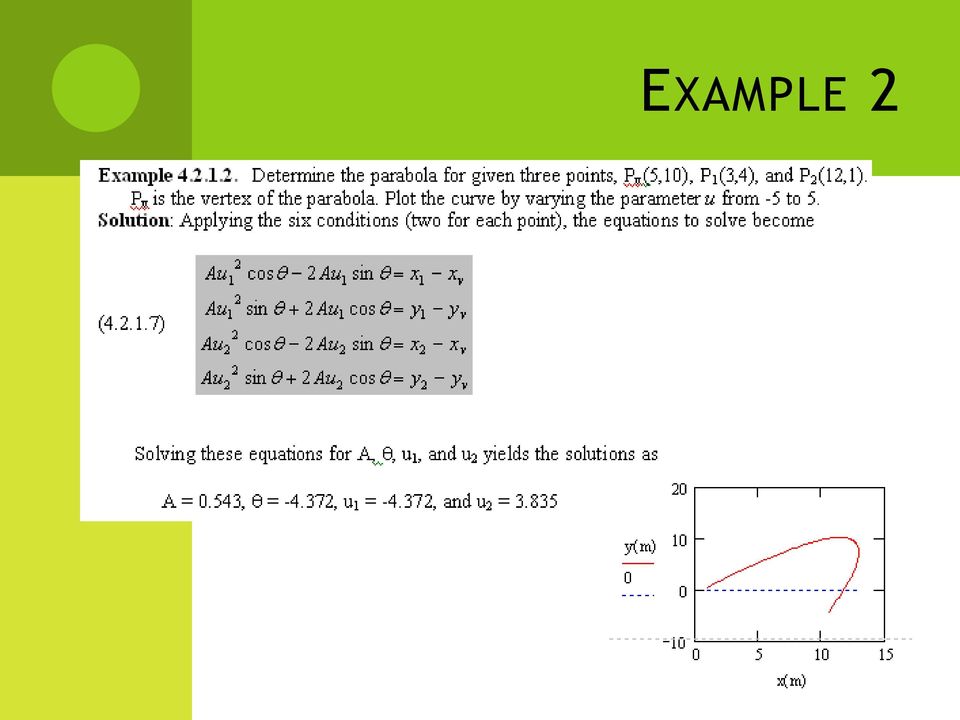
10 EXAMPLE 2
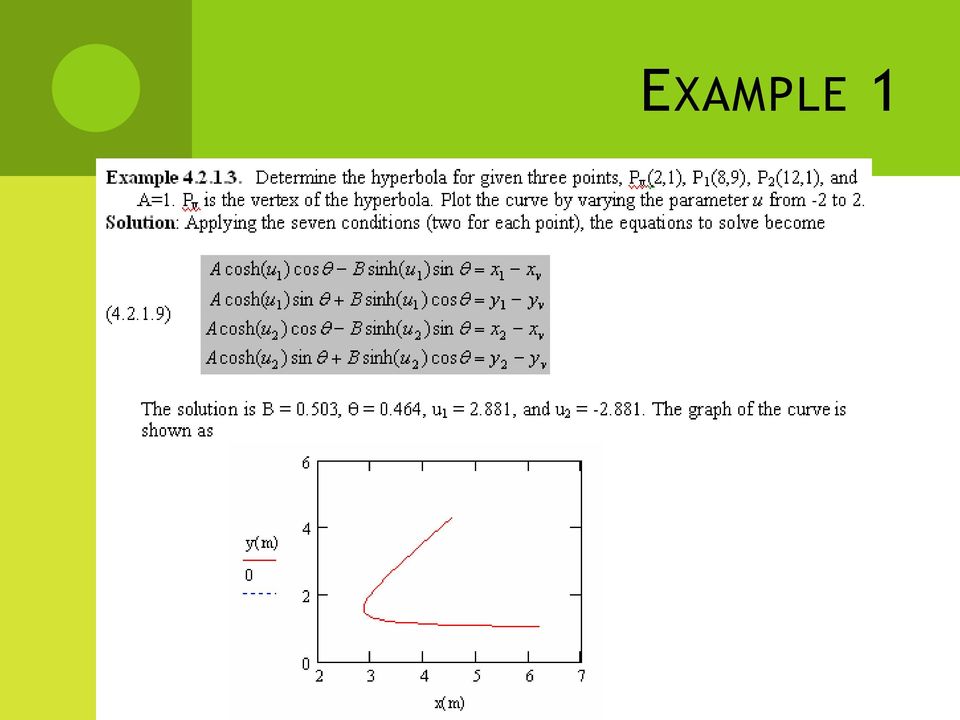
11 HYPERBOLA

12 EXAMPLE 1
13 CONICS The most general form of planar quadratic curves is conic curves or conic sections that include the previously covered curves; lines, circles, ellipses, parabolas, and hyperbolas. The general implicit nonparametric quadratic equation that describes the planar conic curve has five coefficients and naturally needs five conditions to complete it. The conic parametric equation can be described if five conditions are specified appropriately. One case is specifying five points on the curve. L1 0, L2 0, L3 0, L4 0 L1 L2 0, L3L4 0 L L 1 2 al3 L4 0

14 EXAMPLE 1

15 PARAMETRIC REPRESENTATION OF SYNTHETIC CURVES Hermite Cubic Splines Bezier Curves: cubic curve with four control points. B-Splines: general case of Bezier s curve (non-uniform) Rational Curves (algebraic ratio of two polynomials) NURB (non-uniform rational B-spline) curve combines all features of previous curves
 NURB (non-uniform rational B-spline)")

16 HERMITE CUBIC SPLINES


17

18 EXAMPLE
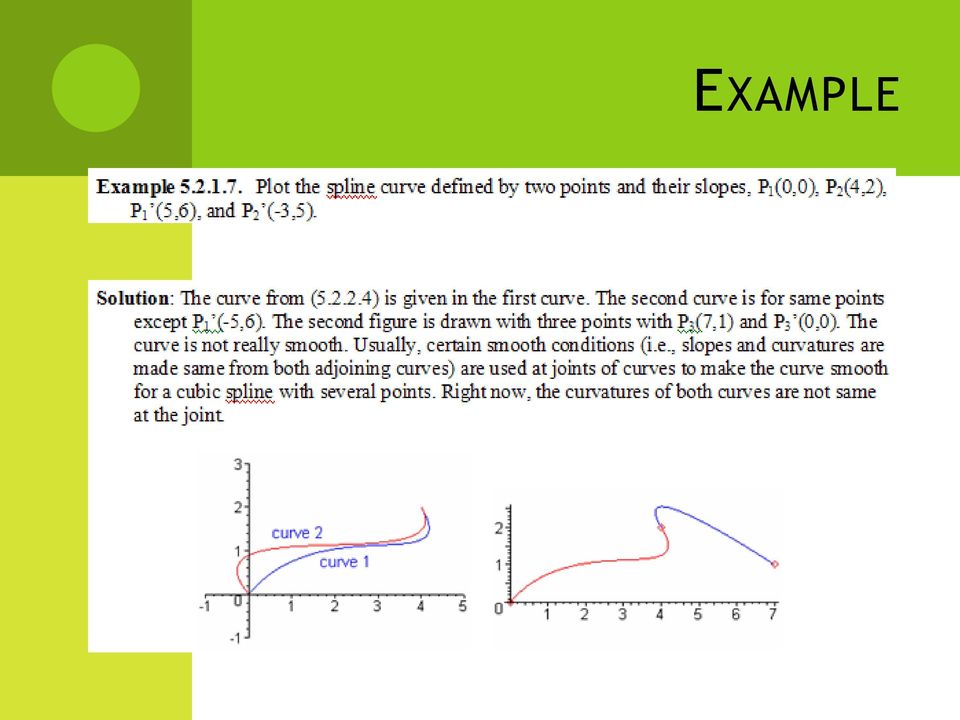
19

20 EXAMPLE

21
22 BEZIER CURVES Another alternative to create curves is to use approximation techniques which produce curves that do not pass through the given data points that are rather used to control the shape of the curves. Approximation techniques arc more often preferred over interpolation techniques in curve design due to the added flexibility and the additional intuitive feel. Bezier curves and surfaces are credited to P. Bezier of the French car firm Regie Renault who developed (about 1962) and used them in his software system called UNISURF which has been used by designers to define the outer panels of several Renault cars.
23
24 EXAMPLE
25 EXAMPLE
26 B-SPLINES In contrast to Bezier curves, the theory of B-spline curves separates the degree of the resulting curve from the number of the given control points. The B-spline curve P(u) for the degree k defined by n + 1 control points n P( u) B ( u) P, 0 u u j0 j0 partition of unity n k k j B j ( u) 1 j max
27 otherwise otherwise u u u n j for otherwise u u u u B j j j j j, 0, 1,, 0, 1, ) ( the recursive property 1 ), ( ) ( ) ( k u B u u u u u B u u u u u B k j j k j k j k j j k j j k j open parametric knots otherwise k j n j k n k j u j, 1, 1 0, for 0 j n + k + 1
28 Knot Values number of knots = number of points + degree + 1 (n k = n+1+k+1 must be satisfied) The individual knot values are not meaningful by themselves; only the ratios of the difference between the knot values matter. To be able to use the parametric knots produced by the coordinates, the values must be in increasing order. Thus, if the curve intersects itself, this cannot be used. The number of duplicate values is limited to no more than the degree. Duplicate knot values make the b-spline curve less smooth. At the extreme, a full multiplicity knot in the middle of the knot list means there is a place on the b-spline curve that can be bent into a sharp kink.
29 Summary of B-spline Basis Function B j k a polynomial function of degree k nonnegative for all j and k (nonnegativity) non-zero only on [u j,u j+k+1 ] (local support) at most k+1 basis functions of degree k are non-zero on knot span [u j,u j+1 ], namely, B j-kk, B j-k+1k,, B j k sum of all degree k basis functions on knot span [u j,u j+1 ] is one (partition of unity) at a knot of multiplicity m, basis function B j k is C k-m continuous. a composite curve of degree k polynomials with joining knots in [u j,u j+k+1 ] n+1 control points, P 0,P 1,,P n n-2 basis functions (i.e., cubic polynomial curve segments, Q 3,Q 4,,Q n ) n-1 knot points, t 3,t 4,,t n+1 (any additional ones needed for computation are set to same values as the nearest) B j k is - defined over a knot interval [u j,u j+1 ] - defined by four of the control points, P j-3,,p j
30 Notable benefits of b-spline include: Independent degree: the degree is set by user and it has nothing to do with number of data points a single piecewise curve of a particular degree: there is no need to stitch together separate curves as in interpolation splines such as natural cubic spline
31 EXAMPLE
32
33
34
35
36 MCAD PROGRAMMING
37
38
39
40 UNIFORM QUADRATIC B-SPLINES
41 UNIFORM CUBIC B-SPLINES

42 RATIONAL CURVES
43 EXAMPLE
44

45 RATIONAL FORMS OF COMMON CURVES
46
47 EXAMPLE
 P B ( u), 0 u u j0 j j max Since the weights depend on the knot vector only, it is useful to add another weight w j to every control point that can be set independently.")
48 NURBS Remember that the b-spline curve is weighted sum of its control points. n k P( u) P B ( u), 0 u u j0 j j max Since the weights depend on the knot vector only, it is useful to add another weight w j to every control point that can be set independently. The weights can be added as n w j B ( u) P( u) N ( u) P, N ( u), 0 u u j0 k j j k j n j0 w j k j B Here, N j k is NURBS basis functions. Thus, the NURBS curve of degree k is defined as weighted sum of control points with NURBS basis functions. k j ( u) max
49 Some of Valuable Properties of NURBS Curves and Surfaces invariant under affine as well as perspective transformations (affine invariance and projective invariance). single mathematical form for both analytical and free-form shapes. flexibility to design variety of shapes. less memory is used when storing shapes in comparison to other methods. numerical algorithms can evaluate them easily and quickly.
50 EXAMPLE Solution. For three control points n = 2 and for the second degree k=2. The uniform knots can be computed by the program in the B-spline example. The following shows result in MathCad with modified program for B jk. It now uses the knot vector as an input.
51
52 Shown below are various curves that vary with different weights. Note that the last shows violation of convex hull property with negative weight for midpoint.
53 CURVE MANIPULATIONS The cases that require manipulation of curves include: Displaying Evaluating Points on Curves Blending Segmentation Trimming Intersection Transformation
54 APPLICATIONS
55

56
57

58 DESIGN APPLICATIONS Example 1. For the given state of stresses (a) determine the principal stresses and (b) state of stresses on a plane a-a. A Example 2. For a plane motion of a bar sliding down the step, find the locus of the point C that is located at one-third length from B. C B
59 TYPES OF SURFACES AND THEIR MATHEMATICAL REPRESENTATIONS Surface model is an extension of wireframe but has advantages: less ambiguous, provide realism for display with hidden lines, mesh, and shading. Surface Entities Plane surface Ruled (lofted) surface (surface created by two curves being blended) Surface of Revolution
60 Tabulated Cylinder (surface created by a curve and a vector) Bezier surface: only approximates the given data points permitting only global control B-spline: surface that can approximate and interpolate permitting local control Coons Patch: used to create a surface using curves that form closed boundaries in contrast to the above surfaces that use open boundaries or set of points. Fillet surface: B-spline surface that blends two surfaces together Free-form surface: formed by free-form curves that are extensions of Bezier, B-spline, and NURB curves.
61 SURFACE REPRESENTATION:
62

63
64 EXAMPLE
65 Plane Surface: P(u,v) = P0 + u(p1-p0) + v(p2-p0) Ruled Surface Surface of Revolution Tabulated Cylinder ANALYTIC SURFACES

66 PLANE SURFACE
67 BILINEAR SURFACE Bilinear surface is a linear interpolation of four corners in two different directions (u, v). P P u,0 u,1 ( u) P( u, v) ( u) (1 u) P (1 u) P (1 v) P 0,0 0,1 u,0 up up vp 1,0 1,1 u,1

68 RULED SURFACE

69 REVOLVED SURFACE

70 TABULATED CYLINDER
71 PARAMETRIC REPRESENTATION OF SYNTHETIC SURFACES
72 HERMITE BICUBIC SURFACES
73 EXAMPLES
74
75
76 BILINEAR SURFACE Bilinear surface is a linear interpolation of four corners in two different directions (u, v). P P u,0 u,1 ( u) P( u, v) ( u) (1 u) P (1 u) P (1 v) P 0,0 0,1 u,0 up up vp 1,0 1,1 u,1
77 COON S PATCH Bilinear surface generated by four corners has straight sides and produce quite flat surfaces. In contrast, Coon s surface uses four side curves. ), ( ), ( ), ( ) ( ) ( ) (1 ), ( ) ( ) ( ) (1 ), ( v u v u v u u v u v v u v u v u v u BT LR T B BT R L LR P P P P P P P P P The surface obtained as above does not produce the end curves. Thus, evaluating the surface on boundaries and forcing it to confirm to the boundary curves yields extra-terms that must be subtracted.
78 Evaluating the surface along edges one finds extra terms that must be subtraceted. P P LR BT ( u, v) ( u, v) P(0, v) (1 u) P (1 v) P P P P LR L L L B ( v) up ( u) vp (0, v) P BT ( v) (1 v) P ( v) ( u) (0, v) B R T (0) vp (0) T must ( v) (1 v) P0,0 vp0,1 PL ( v) On the left edge, the extra terms are identified as ( 1 v) P vp 0,0 0,1
79 Similarly, the other extra terms are found along the other edges and all surplus terms are surplus (1 v) P (1 v) P (1 u) P (1 u) P 0,0 1,0 0,0 0,1 vp vp up 0,1 1,1 up 1,0 1,1 P( u, v) P ( u, v) P ( u, v) surplus LR BT Advantages: Follows boundary curves Limitation: not able to control internal shape
80 EXAMPLE For given data along four edges, use cubic Bezier curves along the edges to create Coon s patch.
81 First find the curves along the edges. Their three components in (u,v) are L,R,B, and T refer to left, right, bottom, and top.
82 The plot is shown below. L,R,B, and T refer to left, right, bottom, and top.

83 The Coon s patch is then obtained as below and the plot is shown with data points.
84 BEZIER SURFACE
85 EXAMPLE
86
87 EXAMPLE [PROGRAMMING]
88
89 B-SPLINE AND NURBS SURFACES
90 EXAMPLE [PROGRAMMING] xp yp zp ,,, wt
91
92
93
94
95
96 OTHER SURFACES
97 SURFACE MANIPULATIONS As in the curve manipulations, the surfaces have to be manipulated for various reasons in the CAD designs. Some of the applications are
98
99 DESIGN AND ENGINEERING APPLICATIONS
100 SOLIDS AND THEIR REPRESENTATIONS Solid Model is based on informationally complete (or spatial addressability), valid, and unambiguous representation of objects and stores geometric data as well as topological information of associated objects. This representation permits automation and integration of tasks such as interference analysis, mass property calculation, finite element modeling, CAPP (computer-aided process planning), machine vision, and NC machining. It is very easy to define an object with a solid model than other two previous modeling techniques (curves and surfaces) because solid models do not need individual locations as with wireframe models.

101 GEOMETRY AND TOPOLOGY The above figure illustrates the difference between geometry and topology. The geometry that defines the object is the lengths of lines, areas of surfaces, the angles between the lines, and the radius and the center of the cylinder and the height. On the other hand, topology (sometimes called combinatorial structure), is the connectivity and associativity of the object entities. It has to do with the notion of neighborhood and determines the relational information between object entities. From a user point of view, geometry is visible and topology is considered to be nongraphical relational information that is stored in solid model databases and are not visible to users.
102 SOLID ENTITIES There are various basic building blocks, so called, primitives that can be combined in certain boolean operations to construct complex models. They include: block cylinder cone sphere wedge Torus In the previous figure, a block and a cylinder were combined with union (i.e., addition) and difference (i.e., subtraction). One more available Boolean operation is intersection.
103 Example Explain how to construct the solid model of the bearing support with primitives and boolean operations. EXAMPLE
104 SOLID REPRESENTATION Underlying fundamentals of solid modeling theory are geometry, topology, geometric closure, set theory, regularization of set operations, set membership classification, and neighborhood. Solid representation is based on the notion that a physical object divides an n-dimensional space, En, into two regions: interior and exterior separated by the boundaries. A region is a portion of space En and the boundary of a region is a closed surface. The set in the set theory is a collection of objects and the operations include complement, union, and intersection. Further, regularized set operations are used to avoid irregular object created by boolean operations. Regular set is a geometrically closed set. The set membership classification determines if some objects intersect with a given object.

105 Half-spaces are unbounded geometric entities; each one of them divides the representation space into two infinite portions, one filled with material and the other empty. By combining half-spaces in a building block fashion, various solids can be constructed. Thus, a solid model of an object can be defined as a point set S in threedimensional Euclidean space E3. If three sets for a region is denoted by Si (interior set), Se (exterior set), and Sb (boundary set), then the set for the solid model can be expressed as
106 The mathematical properties that the solid model should capture can be stated as: Rigidity Homogeneous three-dimensionality (ie. no dangling boundaries) Finiteness and finite describability Closure under rigid motion and regularized boolean operations Boundary determinism (ie. Boundary must contain the solid) The mathematical implication of the above properties suggests that valid solid models are bounded, closed, regular, and semi-analytic subsets of E3. These subsets are called r-sets (ie. regularized sets), which are curved polyhedra with well-behaved boundaries. Here, regular means no dangling portion and semi-analytic means no oscillation in value.
107 FUNDAMENTALS OF SOLID MODELING Various solid representation schemes require several underlying fundamentals of solid modeling theory. They include geometry, topology, geometric closure, set theory, regularization of set operations, set membership classification, and neighborhood. For detailed discussion of these topics, the readers are encouraged to refer to advanced topics on solid modeling. In the following some of most popular solid modeling techniques are discussed.

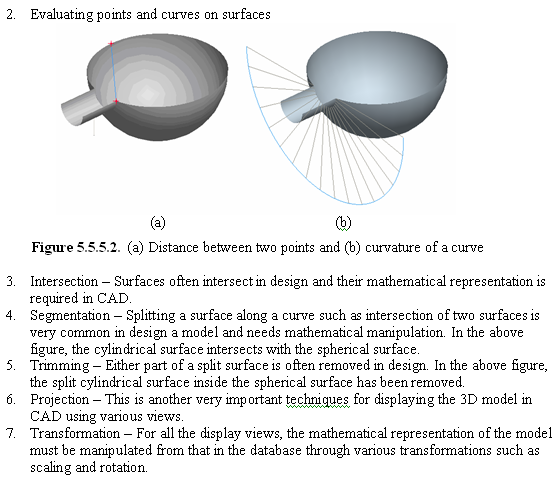
108 MODELING TECHNIQUES Boundary Representation (B-rep): A B-rep model is one of the two most popular and widely used schemes and is based on the topological notion that a physical object is bounded by a set of faces. The following shows various faceted B-rep solids.
 to form the object. The basic elements are block, cylinder, cone, sphere, wedge, and torus and building operations are Boolean operations.")
109 Constructive Solid Geometry (CSG): This is based on the topological notion that a physical object can be divided into a set of primitives that can be combined in a certain order following a set of rules (i.e. Boolean operations) to form the object. The basic elements are block, cylinder, cone, sphere, wedge, and torus and building operations are Boolean operations. The following bearing support was constructed with various primitives in a certain sequence by CSG technique.

110 Sweep Representation: This is especially useful for two-and-half dimensional objects used most frequently for extruded solids and revolved solids. This is based on sweeping of a section along a path that may be linear, nonlinear, and hybrid operations. When the path is straight, it s a simple extrusion and when it is axisymmetric, it becomes the revolution. For nonlinear path, the sweeping is done along a nonlinear curve in space. Cutting tool path simulation is one good applications of this technique. The section may vary along the sweeping path. The following shows such an example with variable section.
111 Analytic Solid Modeling (ASM): Historically it is closely related to three dimensional isoparametric formulation of finite element analysis for 8- to 20-node hexahedral elements. This arose from the need to model complex objects for finite element analysis. ASM uses the parametric representation of an object in three-dimensional space that is a mapping of a cubical parametric domain (so called, master domain) into a solid described by the global coordinates (MCS).
112 Other Representations: primitive instancing: is based on notion of families of objects or family of parts. cell decomposition scheme: an object can be represented as the sum of cells. spatial enumeration scheme: a solid is represented by the sum of spatial cells that it occupies. The cells have fixed size. octree encoding scheme: is generalization of spatial enumeration scheme with variable cell size.
Geometric Modelling & Curves
 Geometric Modelling & Curves Geometric Modeling Creating symbolic models of the physical world has long been a goal of mathematicians, scientists, engineers, etc. Recently technology has advanced sufficiently
Geometric Modelling & Curves Geometric Modeling Creating symbolic models of the physical world has long been a goal of mathematicians, scientists, engineers, etc. Recently technology has advanced sufficiently
Computer Graphics. Geometric Modeling. Page 1. Copyright Gotsman, Elber, Barequet, Karni, Sheffer Computer Science - Technion. An Example.
 An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
We can display an object on a monitor screen in three different computer-model forms: Wireframe model Surface Model Solid model
 CHAPTER 4 CURVES 4.1 Introduction In order to understand the significance of curves, we should look into the types of model representations that are used in geometric modeling. Curves play a very significant
CHAPTER 4 CURVES 4.1 Introduction In order to understand the significance of curves, we should look into the types of model representations that are used in geometric modeling. Curves play a very significant
Curves and Surfaces. Goals. How do we draw surfaces? How do we specify a surface? How do we approximate a surface?
 Curves and Surfaces Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces [Angel 10.1-10.6] Goals How do we draw surfaces? Approximate with polygons Draw polygons
Curves and Surfaces Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces [Angel 10.1-10.6] Goals How do we draw surfaces? Approximate with polygons Draw polygons
Computer Graphics CS 543 Lecture 12 (Part 1) Curves. Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)
 Curves. Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)") Computer Graphics CS 54 Lecture 1 (Part 1) Curves Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) So Far Dealt with straight lines and flat surfaces Real world objects include
Computer Graphics CS 54 Lecture 1 (Part 1) Curves Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) So Far Dealt with straight lines and flat surfaces Real world objects include
CATIA Wireframe & Surfaces TABLE OF CONTENTS
 TABLE OF CONTENTS Introduction... 1 Wireframe & Surfaces... 2 Pull Down Menus... 3 Edit... 3 Insert... 4 Tools... 6 Generative Shape Design Workbench... 7 Bottom Toolbar... 9 Tools... 9 Analysis... 10
TABLE OF CONTENTS Introduction... 1 Wireframe & Surfaces... 2 Pull Down Menus... 3 Edit... 3 Insert... 4 Tools... 6 Generative Shape Design Workbench... 7 Bottom Toolbar... 9 Tools... 9 Analysis... 10
Computer Animation: Art, Science and Criticism
 Computer Animation: Art, Science and Criticism Tom Ellman Harry Roseman Lecture 4 Parametric Curve A procedure for distorting a straight line into a (possibly) curved line. The procedure lives in a black
Computer Animation: Art, Science and Criticism Tom Ellman Harry Roseman Lecture 4 Parametric Curve A procedure for distorting a straight line into a (possibly) curved line. The procedure lives in a black
BEZIER CURVES AND SURFACES
 Department of Applied Mathematics and Computational Sciences University of Cantabria UC-CAGD Group COMPUTER-AIDED GEOMETRIC DESIGN AND COMPUTER GRAPHICS: BEZIER CURVES AND SURFACES Andrés Iglesias e-mail:
Department of Applied Mathematics and Computational Sciences University of Cantabria UC-CAGD Group COMPUTER-AIDED GEOMETRIC DESIGN AND COMPUTER GRAPHICS: BEZIER CURVES AND SURFACES Andrés Iglesias e-mail:
Figure 2.1: Center of mass of four points.
 Chapter 2 Bézier curves are named after their inventor, Dr. Pierre Bézier. Bézier was an engineer with the Renault car company and set out in the early 196 s to develop a curve formulation which would
Chapter 2 Bézier curves are named after their inventor, Dr. Pierre Bézier. Bézier was an engineer with the Renault car company and set out in the early 196 s to develop a curve formulation which would
Essential Mathematics for Computer Graphics fast
 John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
CSE 167: Lecture 13: Bézier Curves. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Lecture 13: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #6 due Friday, Nov 18
CSE 167: Introduction to Computer Graphics Lecture 13: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #6 due Friday, Nov 18
Estimated Pre Calculus Pacing Timeline
 Estimated Pre Calculus Pacing Timeline 2010-2011 School Year The timeframes listed on this calendar are estimates based on a fifty-minute class period. You may need to adjust some of them from time to
Estimated Pre Calculus Pacing Timeline 2010-2011 School Year The timeframes listed on this calendar are estimates based on a fifty-minute class period. You may need to adjust some of them from time to
Finite Element Formulation for Plates - Handout 3 -
 Finite Element Formulation for Plates - Handout 3 - Dr Fehmi Cirak (fc286@) Completed Version Definitions A plate is a three dimensional solid body with one of the plate dimensions much smaller than the
Finite Element Formulation for Plates - Handout 3 - Dr Fehmi Cirak (fc286@) Completed Version Definitions A plate is a three dimensional solid body with one of the plate dimensions much smaller than the
Algebra 2 Chapter 1 Vocabulary. identity - A statement that equates two equivalent expressions.
 Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
CHAPTER 1 Splines and B-splines an Introduction
 CHAPTER 1 Splines and B-splines an Introduction In this first chapter, we consider the following fundamental problem: Given a set of points in the plane, determine a smooth curve that approximates the
CHAPTER 1 Splines and B-splines an Introduction In this first chapter, we consider the following fundamental problem: Given a set of points in the plane, determine a smooth curve that approximates the
An introduction to 3D draughting & solid modelling using AutoCAD
 An introduction to 3D draughting & solid modelling using AutoCAD Faculty of Technology University of Plymouth Drake Circus Plymouth PL4 8AA These notes are to be used in conjunction with the AutoCAD software
An introduction to 3D draughting & solid modelling using AutoCAD Faculty of Technology University of Plymouth Drake Circus Plymouth PL4 8AA These notes are to be used in conjunction with the AutoCAD software
(Refer Slide Time: 1:42)
") Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 10 Curves So today we are going to have a new topic. So far
Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 10 Curves So today we are going to have a new topic. So far
INVERSION AND PROBLEM OF TANGENT SPHERES
 South Bohemia Mathematical Letters Volume 18, (2010), No. 1, 55-62. INVERSION AND PROBLEM OF TANGENT SPHERES Abstract. The locus of centers of circles tangent to two given circles in plane is known to
South Bohemia Mathematical Letters Volume 18, (2010), No. 1, 55-62. INVERSION AND PROBLEM OF TANGENT SPHERES Abstract. The locus of centers of circles tangent to two given circles in plane is known to
Introduction to CATIA V5
 Introduction to CATIA V5 Release 16 (A Hands-On Tutorial Approach) Kirstie Plantenberg University of Detroit Mercy SDC PUBLICATIONS Schroff Development Corporation www.schroff.com www.schroff-europe.com
Introduction to CATIA V5 Release 16 (A Hands-On Tutorial Approach) Kirstie Plantenberg University of Detroit Mercy SDC PUBLICATIONS Schroff Development Corporation www.schroff.com www.schroff-europe.com
Computer Aided Design (CAD)
") 16.810 Engineering Design and Rapid Prototyping Lecture 4 Computer Aided Design (CAD) Instructor(s) Prof. Olivier de Weck January 6, 2005 Plan for Today CAD Lecture (ca. 50 min) CAD History, Background
16.810 Engineering Design and Rapid Prototyping Lecture 4 Computer Aided Design (CAD) Instructor(s) Prof. Olivier de Weck January 6, 2005 Plan for Today CAD Lecture (ca. 50 min) CAD History, Background
AutoCAD 2009. New Icon Quick Reference
 AutoCAD 2009 New Quick Reference Contents Chapter 1 New Quick Reference..................... 1 Toolbars................................... 1 3D Navigation Toolbar........................ 1 CAD Standards
AutoCAD 2009 New Quick Reference Contents Chapter 1 New Quick Reference..................... 1 Toolbars................................... 1 3D Navigation Toolbar........................ 1 CAD Standards
Computer Aided Design (CAD)
") 16.810 Engineering Design and Rapid Prototyping Lecture 3a Computer Aided Design (CAD) Instructor(s) Prof. Olivier de Weck January 16, 2007 Plan for Today CAD Lecture (ca. 50 min) CAD History, Background
16.810 Engineering Design and Rapid Prototyping Lecture 3a Computer Aided Design (CAD) Instructor(s) Prof. Olivier de Weck January 16, 2007 Plan for Today CAD Lecture (ca. 50 min) CAD History, Background
Algebra 1 2008. Academic Content Standards Grade Eight and Grade Nine Ohio. Grade Eight. Number, Number Sense and Operations Standard
 Academic Content Standards Grade Eight and Grade Nine Ohio Algebra 1 2008 Grade Eight STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express
Academic Content Standards Grade Eight and Grade Nine Ohio Algebra 1 2008 Grade Eight STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express
Computer Aided Systems
 5 Computer Aided Systems Ivan Kuric Prof. Ivan Kuric, University of Zilina, Faculty of Mechanical Engineering, Department of Machining and Automation, Slovak republic, ivan.kuric@fstroj.utc.sk 1.1 Introduction
5 Computer Aided Systems Ivan Kuric Prof. Ivan Kuric, University of Zilina, Faculty of Mechanical Engineering, Department of Machining and Automation, Slovak republic, ivan.kuric@fstroj.utc.sk 1.1 Introduction
Pre-Algebra 2008. Academic Content Standards Grade Eight Ohio. Number, Number Sense and Operations Standard. Number and Number Systems
 Academic Content Standards Grade Eight Ohio Pre-Algebra 2008 STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express large numbers and small
Academic Content Standards Grade Eight Ohio Pre-Algebra 2008 STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express large numbers and small
New York State Student Learning Objective: Regents Geometry
 New York State Student Learning Objective: Regents Geometry All SLOs MUST include the following basic components: Population These are the students assigned to the course section(s) in this SLO all students
New York State Student Learning Objective: Regents Geometry All SLOs MUST include the following basic components: Population These are the students assigned to the course section(s) in this SLO all students
Computational Geometry. Lecture 1: Introduction and Convex Hulls
 Lecture 1: Introduction and convex hulls 1 Geometry: points, lines,... Plane (two-dimensional), R 2 Space (three-dimensional), R 3 Space (higher-dimensional), R d A point in the plane, 3-dimensional space,
Lecture 1: Introduction and convex hulls 1 Geometry: points, lines,... Plane (two-dimensional), R 2 Space (three-dimensional), R 3 Space (higher-dimensional), R d A point in the plane, 3-dimensional space,
Course Description. Spring 2004 1
 Spring 2004 1 Course Description AE4375: advanced treatment for undergrads; focus on learning and aplying CAD to engineering; CAD modeling projects. AE6380: graduate course on CAD focusing on how tools
Spring 2004 1 Course Description AE4375: advanced treatment for undergrads; focus on learning and aplying CAD to engineering; CAD modeling projects. AE6380: graduate course on CAD focusing on how tools
Modeling Curved Surfaces
 Modeling Cylindrical and Curved Theory Views of Cylinders Contour Lines Extruded Surfaces Revolved Surfaces & Cutouts Profile Shape Axis of Revolution Swept Surfaces & Cutouts Profile Shape Path Curves
Modeling Cylindrical and Curved Theory Views of Cylinders Contour Lines Extruded Surfaces Revolved Surfaces & Cutouts Profile Shape Axis of Revolution Swept Surfaces & Cutouts Profile Shape Path Curves
Algorithms for Real-Time Tool Path Generation
 Algorithms for Real-Time Tool Path Generation Gyula Hermann John von Neumann Faculty of Information Technology, Budapest Polytechnic H-1034 Nagyszombat utca 19 Budapest Hungary, hermgyviif.hu Abstract:The
Algorithms for Real-Time Tool Path Generation Gyula Hermann John von Neumann Faculty of Information Technology, Budapest Polytechnic H-1034 Nagyszombat utca 19 Budapest Hungary, hermgyviif.hu Abstract:The
Arrangements And Duality
 Arrangements And Duality 3.1 Introduction 3 Point configurations are tbe most basic structure we study in computational geometry. But what about configurations of more complicated shapes? For example,
Arrangements And Duality 3.1 Introduction 3 Point configurations are tbe most basic structure we study in computational geometry. But what about configurations of more complicated shapes? For example,
SolidWorks Implementation Guides. Sketching Concepts
 SolidWorks Implementation Guides Sketching Concepts Sketching in SolidWorks is the basis for creating features. Features are the basis for creating parts, which can be put together into assemblies. Sketch
SolidWorks Implementation Guides Sketching Concepts Sketching in SolidWorks is the basis for creating features. Features are the basis for creating parts, which can be put together into assemblies. Sketch
Seminar. Path planning using Voronoi diagrams and B-Splines. Stefano Martina stefano.martina@stud.unifi.it
 Seminar Path planning using Voronoi diagrams and B-Splines Stefano Martina stefano.martina@stud.unifi.it 23 may 2016 This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International
Seminar Path planning using Voronoi diagrams and B-Splines Stefano Martina stefano.martina@stud.unifi.it 23 may 2016 This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International
CAD/CAM and the Exchange of Product Data
 CAD/CAM and the Exchange of Product Data N.-J. Høimyr CERN, Geneva, Switzerland Abstract A 3D model defined in a CAD-system is used as a basis for design and product development. The concept of Computer
CAD/CAM and the Exchange of Product Data N.-J. Høimyr CERN, Geneva, Switzerland Abstract A 3D model defined in a CAD-system is used as a basis for design and product development. The concept of Computer
EECS 556 Image Processing W 09. Interpolation. Interpolation techniques B splines
 EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
Curriculum Map by Block Geometry Mapping for Math Block Testing 2007-2008. August 20 to August 24 Review concepts from previous grades.
 Curriculum Map by Geometry Mapping for Math Testing 2007-2008 Pre- s 1 August 20 to August 24 Review concepts from previous grades. August 27 to September 28 (Assessment to be completed by September 28)
Curriculum Map by Geometry Mapping for Math Testing 2007-2008 Pre- s 1 August 20 to August 24 Review concepts from previous grades. August 27 to September 28 (Assessment to be completed by September 28)
Higher Education Math Placement
 Higher Education Math Placement Placement Assessment Problem Types 1. Whole Numbers, Fractions, and Decimals 1.1 Operations with Whole Numbers Addition with carry Subtraction with borrowing Multiplication
Higher Education Math Placement Placement Assessment Problem Types 1. Whole Numbers, Fractions, and Decimals 1.1 Operations with Whole Numbers Addition with carry Subtraction with borrowing Multiplication
An Overview of the Finite Element Analysis
 CHAPTER 1 An Overview of the Finite Element Analysis 1.1 Introduction Finite element analysis (FEA) involves solution of engineering problems using computers. Engineering structures that have complex geometry
CHAPTER 1 An Overview of the Finite Element Analysis 1.1 Introduction Finite element analysis (FEA) involves solution of engineering problems using computers. Engineering structures that have complex geometry
Modeling Curves and Surfaces
 Modeling Curves and Surfaces Graphics I Modeling for Computer Graphics!? 1 How can we generate this kind of objects? Umm!? Mathematical Modeling! S Do not worry too much about your difficulties in mathematics,
Modeling Curves and Surfaces Graphics I Modeling for Computer Graphics!? 1 How can we generate this kind of objects? Umm!? Mathematical Modeling! S Do not worry too much about your difficulties in mathematics,
the points are called control points approximating curve
 Chapter 4 Spline Curves A spline curve is a mathematical representation for which it is easy to build an interface that will allow a user to design and control the shape of complex curves and surfaces.
Chapter 4 Spline Curves A spline curve is a mathematical representation for which it is easy to build an interface that will allow a user to design and control the shape of complex curves and surfaces.
Advanced Surface Modeling
 This sample chapter is for review purposes only. Copyright The Goodheart-Willcox Co., Inc. ll rights reserved. Chapter dvanced Modeling Learning Objectives fter completing this chapter, you will be able
This sample chapter is for review purposes only. Copyright The Goodheart-Willcox Co., Inc. ll rights reserved. Chapter dvanced Modeling Learning Objectives fter completing this chapter, you will be able
Solving Simultaneous Equations and Matrices
 Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Algebra and Geometry Review (61 topics, no due date)
") Course Name: Math 112 Credit Exam LA Tech University Course Code: ALEKS Course: Trigonometry Instructor: Course Dates: Course Content: 159 topics Algebra and Geometry Review (61 topics, no due date) Properties
Course Name: Math 112 Credit Exam LA Tech University Course Code: ALEKS Course: Trigonometry Instructor: Course Dates: Course Content: 159 topics Algebra and Geometry Review (61 topics, no due date) Properties
Thnkwell s Homeschool Precalculus Course Lesson Plan: 36 weeks
 Thnkwell s Homeschool Precalculus Course Lesson Plan: 36 weeks Welcome to Thinkwell s Homeschool Precalculus! We re thrilled that you ve decided to make us part of your homeschool curriculum. This lesson
Thnkwell s Homeschool Precalculus Course Lesson Plan: 36 weeks Welcome to Thinkwell s Homeschool Precalculus! We re thrilled that you ve decided to make us part of your homeschool curriculum. This lesson
Generative Shape Design
 Generative Shape Design Preface What's New Getting Started Basic Tasks Advanced Tasks Workbench Description Glossary Index Dassault Systèmes 1994-99. All rights reserved. Preface CATIA Version 5 Generative
Generative Shape Design Preface What's New Getting Started Basic Tasks Advanced Tasks Workbench Description Glossary Index Dassault Systèmes 1994-99. All rights reserved. Preface CATIA Version 5 Generative
Content. Chapter 4 Functions 61 4.1 Basic concepts on real functions 62. Credits 11
 Content Credits 11 Chapter 1 Arithmetic Refresher 13 1.1 Algebra 14 Real Numbers 14 Real Polynomials 19 1.2 Equations in one variable 21 Linear Equations 21 Quadratic Equations 22 1.3 Exercises 28 Chapter
Content Credits 11 Chapter 1 Arithmetic Refresher 13 1.1 Algebra 14 Real Numbers 14 Real Polynomials 19 1.2 Equations in one variable 21 Linear Equations 21 Quadratic Equations 22 1.3 Exercises 28 Chapter
Volumes of Revolution
 Mathematics Volumes of Revolution About this Lesson This lesson provides students with a physical method to visualize -dimensional solids and a specific procedure to sketch a solid of revolution. Students
Mathematics Volumes of Revolution About this Lesson This lesson provides students with a physical method to visualize -dimensional solids and a specific procedure to sketch a solid of revolution. Students
Biggar High School Mathematics Department. National 5 Learning Intentions & Success Criteria: Assessing My Progress
 Biggar High School Mathematics Department National 5 Learning Intentions & Success Criteria: Assessing My Progress Expressions & Formulae Topic Learning Intention Success Criteria I understand this Approximation
Biggar High School Mathematics Department National 5 Learning Intentions & Success Criteria: Assessing My Progress Expressions & Formulae Topic Learning Intention Success Criteria I understand this Approximation
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS
 NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK September 2014 Authorized for Distribution by the New York State Education Department This test design and framework document
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK September 2014 Authorized for Distribution by the New York State Education Department This test design and framework document
Geometry Enduring Understandings Students will understand 1. that all circles are similar.
 High School - Circles Essential Questions: 1. Why are geometry and geometric figures relevant and important? 2. How can geometric ideas be communicated using a variety of representations? ******(i.e maps,
High School - Circles Essential Questions: 1. Why are geometry and geometric figures relevant and important? 2. How can geometric ideas be communicated using a variety of representations? ******(i.e maps,
10.0-2. Finite Element Modeling
 What s New in FEMAP FEMAP 10.0 and 10.0.1 include enhancements and new features in: User Interface on page 3 Meshing on page 23 Mesh Associativity on page 33 Properties on page 33 Functions on page 35
What s New in FEMAP FEMAP 10.0 and 10.0.1 include enhancements and new features in: User Interface on page 3 Meshing on page 23 Mesh Associativity on page 33 Properties on page 33 Functions on page 35
Mean Value Coordinates
 Mean Value Coordinates Michael S. Floater Abstract: We derive a generalization of barycentric coordinates which allows a vertex in a planar triangulation to be expressed as a convex combination of its
Mean Value Coordinates Michael S. Floater Abstract: We derive a generalization of barycentric coordinates which allows a vertex in a planar triangulation to be expressed as a convex combination of its
How To Use Design Mentor
 DesignMentor: A Pedagogical Tool for Computer Graphics and Computer Aided Design John L. Lowther and Ching Kuang Shene Programmers: Yuan Zhao and Yan Zhou (ver 1) Budirijanto Purnomo (ver 2) Michigan Technological
DesignMentor: A Pedagogical Tool for Computer Graphics and Computer Aided Design John L. Lowther and Ching Kuang Shene Programmers: Yuan Zhao and Yan Zhou (ver 1) Budirijanto Purnomo (ver 2) Michigan Technological
Creating a 2D Geometry Model
 Creating a 2D Geometry Model This section describes how to build a 2D cross section of a heat sink and introduces 2D geometry operations in COMSOL. At this time, you do not model the physics that describe
Creating a 2D Geometry Model This section describes how to build a 2D cross section of a heat sink and introduces 2D geometry operations in COMSOL. At this time, you do not model the physics that describe
GEOMETRY COMMON CORE STANDARDS
 1st Nine Weeks Experiment with transformations in the plane G-CO.1 Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of point,
1st Nine Weeks Experiment with transformations in the plane G-CO.1 Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of point,
Projective Geometry: A Short Introduction. Lecture Notes Edmond Boyer
 Projective Geometry: A Short Introduction Lecture Notes Edmond Boyer Contents 1 Introduction 2 11 Objective 2 12 Historical Background 3 13 Bibliography 4 2 Projective Spaces 5 21 Definitions 5 22 Properties
Projective Geometry: A Short Introduction Lecture Notes Edmond Boyer Contents 1 Introduction 2 11 Objective 2 12 Historical Background 3 13 Bibliography 4 2 Projective Spaces 5 21 Definitions 5 22 Properties
Planar Curve Intersection
 Chapter 7 Planar Curve Intersection Curve intersection involves finding the points at which two planar curves intersect. If the two curves are parametric, the solution also identifies the parameter values
Chapter 7 Planar Curve Intersection Curve intersection involves finding the points at which two planar curves intersect. If the two curves are parametric, the solution also identifies the parameter values
NURBS Drawing Week 5, Lecture 10
 CS 430/536 Computer Graphics I NURBS Drawing Week 5, Lecture 10 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel University
CS 430/536 Computer Graphics I NURBS Drawing Week 5, Lecture 10 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel University
The Essentials of CAGD
 The Essentials of CAGD Chapter 2: Lines and Planes Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford
The Essentials of CAGD Chapter 2: Lines and Planes Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford
Gymnázium, Brno, Slovanské nám. 7, SCHEME OF WORK Mathematics SCHEME OF WORK. http://agb.gymnaslo. cz
 SCHEME OF WORK Subject: Mathematics Year: Third grade, 3.X School year:../ List of topics Topics Time period 1. Revision (functions, plane geometry) September 2. Constructive geometry in the plane October
SCHEME OF WORK Subject: Mathematics Year: Third grade, 3.X School year:../ List of topics Topics Time period 1. Revision (functions, plane geometry) September 2. Constructive geometry in the plane October
SAT Subject Test Practice Test II: Math Level II Time 60 minutes, 50 Questions
 SAT Subject Test Practice Test II: Math Level II Time 60 minutes, 50 Questions All questions in the Math Level 1 and Math Level Tests are multiple-choice questions in which you are asked to choose the
SAT Subject Test Practice Test II: Math Level II Time 60 minutes, 50 Questions All questions in the Math Level 1 and Math Level Tests are multiple-choice questions in which you are asked to choose the
Geometry. Higher Mathematics Courses 69. Geometry
 The fundamental purpose of the course is to formalize and extend students geometric experiences from the middle grades. This course includes standards from the conceptual categories of and Statistics and
The fundamental purpose of the course is to formalize and extend students geometric experiences from the middle grades. This course includes standards from the conceptual categories of and Statistics and
MA 323 Geometric Modelling Course Notes: Day 02 Model Construction Problem
 MA 323 Geometric Modelling Course Notes: Day 02 Model Construction Problem David L. Finn November 30th, 2004 In the next few days, we will introduce some of the basic problems in geometric modelling, and
MA 323 Geometric Modelling Course Notes: Day 02 Model Construction Problem David L. Finn November 30th, 2004 In the next few days, we will introduce some of the basic problems in geometric modelling, and
A Geometric Characterization of Parametric Cubic Curves
 A Geometric Characterization of Parametric Cubic Curves MAUREEN C. STONE Xerox PARC and TONY D. DEROSE University of Washington In this paper, we analyze planar parametric cubic curves to determine conditions
A Geometric Characterization of Parametric Cubic Curves MAUREEN C. STONE Xerox PARC and TONY D. DEROSE University of Washington In this paper, we analyze planar parametric cubic curves to determine conditions
GEOMETRY CONCEPT MAP. Suggested Sequence:
 CONCEPT MAP GEOMETRY August 2011 Suggested Sequence: 1. Tools of Geometry 2. Reasoning and Proof 3. Parallel and Perpendicular Lines 4. Congruent Triangles 5. Relationships Within Triangles 6. Polygons
CONCEPT MAP GEOMETRY August 2011 Suggested Sequence: 1. Tools of Geometry 2. Reasoning and Proof 3. Parallel and Perpendicular Lines 4. Congruent Triangles 5. Relationships Within Triangles 6. Polygons
South Carolina College- and Career-Ready (SCCCR) Pre-Calculus
 Pre-Calculus") South Carolina College- and Career-Ready (SCCCR) Pre-Calculus Key Concepts Arithmetic with Polynomials and Rational Expressions PC.AAPR.2 PC.AAPR.3 PC.AAPR.4 PC.AAPR.5 PC.AAPR.6 PC.AAPR.7 Standards Know
South Carolina College- and Career-Ready (SCCCR) Pre-Calculus Key Concepts Arithmetic with Polynomials and Rational Expressions PC.AAPR.2 PC.AAPR.3 PC.AAPR.4 PC.AAPR.5 PC.AAPR.6 PC.AAPR.7 Standards Know
Algebra Geometry Glossary. 90 angle
 lgebra Geometry Glossary 1) acute angle an angle less than 90 acute angle 90 angle 2) acute triangle a triangle where all angles are less than 90 3) adjacent angles angles that share a common leg Example:
lgebra Geometry Glossary 1) acute angle an angle less than 90 acute angle 90 angle 2) acute triangle a triangle where all angles are less than 90 3) adjacent angles angles that share a common leg Example:
Math 1B, lecture 5: area and volume
 Math B, lecture 5: area and volume Nathan Pflueger 6 September 2 Introduction This lecture and the next will be concerned with the computation of areas of regions in the plane, and volumes of regions in
Math B, lecture 5: area and volume Nathan Pflueger 6 September 2 Introduction This lecture and the next will be concerned with the computation of areas of regions in the plane, and volumes of regions in
In mathematics, there are four attainment targets: using and applying mathematics; number and algebra; shape, space and measures, and handling data.
 MATHEMATICS: THE LEVEL DESCRIPTIONS In mathematics, there are four attainment targets: using and applying mathematics; number and algebra; shape, space and measures, and handling data. Attainment target
MATHEMATICS: THE LEVEL DESCRIPTIONS In mathematics, there are four attainment targets: using and applying mathematics; number and algebra; shape, space and measures, and handling data. Attainment target
Geometric description of the cross product of the vectors u and v. The cross product of two vectors is a vector! u x v is perpendicular to u and v
 12.4 Cross Product Geometric description of the cross product of the vectors u and v The cross product of two vectors is a vector! u x v is perpendicular to u and v The length of u x v is uv u v sin The
12.4 Cross Product Geometric description of the cross product of the vectors u and v The cross product of two vectors is a vector! u x v is perpendicular to u and v The length of u x v is uv u v sin The
HIGH SCHOOL: GEOMETRY (Page 1 of 4)
") HIGH SCHOOL: GEOMETRY (Page 1 of 4) Geometry is a complete college preparatory course of plane and solid geometry. It is recommended that there be a strand of algebra review woven throughout the course
HIGH SCHOOL: GEOMETRY (Page 1 of 4) Geometry is a complete college preparatory course of plane and solid geometry. It is recommended that there be a strand of algebra review woven throughout the course
TWO-DIMENSIONAL TRANSFORMATION
 CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
Wireframe and Surface
 Wireframe and Surface Preface What's New Getting Started Basic Tasks Workbench Description Glossary Index Dassault Systèmes 1994-99. All rights reserved. Preface CATIA Version 5 Wireframe and Surface allows
Wireframe and Surface Preface What's New Getting Started Basic Tasks Workbench Description Glossary Index Dassault Systèmes 1994-99. All rights reserved. Preface CATIA Version 5 Wireframe and Surface allows
ME 111: Engineering Drawing
 ME 111: Engineering Drawing Lecture 4 08-08-2011 Engineering Curves and Theory of Projection Indian Institute of Technology Guwahati Guwahati 781039 Eccentrici ty = Distance of the point from the focus
ME 111: Engineering Drawing Lecture 4 08-08-2011 Engineering Curves and Theory of Projection Indian Institute of Technology Guwahati Guwahati 781039 Eccentrici ty = Distance of the point from the focus
11.1. Objectives. Component Form of a Vector. Component Form of a Vector. Component Form of a Vector. Vectors and the Geometry of Space
 11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
PARAMETRIC MODELING. David Rosen. December 1997. By carefully laying-out datums and geometry, then constraining them with dimensions and constraints,
 1 of 5 11/18/2004 6:24 PM PARAMETRIC MODELING David Rosen December 1997 The term parametric modeling denotes the use of parameters to control the dimensions and shape of CAD models. Think of a rubber CAD
1 of 5 11/18/2004 6:24 PM PARAMETRIC MODELING David Rosen December 1997 The term parametric modeling denotes the use of parameters to control the dimensions and shape of CAD models. Think of a rubber CAD
A Short Introduction to Computer Graphics
 A Short Introduction to Computer Graphics Frédo Durand MIT Laboratory for Computer Science 1 Introduction Chapter I: Basics Although computer graphics is a vast field that encompasses almost any graphical
A Short Introduction to Computer Graphics Frédo Durand MIT Laboratory for Computer Science 1 Introduction Chapter I: Basics Although computer graphics is a vast field that encompasses almost any graphical
Copyrighted Material. Chapter 1 DEGREE OF A CURVE
 Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
SOLIDWORKS: SKETCH RELATIONS
 Sketch Feature: The shape or topology of the initial sketch or model is important, but exact geometry and dimensions of the initial sketched shapes are NOT. It recommended to work in the following order:
Sketch Feature: The shape or topology of the initial sketch or model is important, but exact geometry and dimensions of the initial sketched shapes are NOT. It recommended to work in the following order:
The Australian Curriculum Mathematics
 The Australian Curriculum Mathematics Mathematics ACARA The Australian Curriculum Number Algebra Number place value Fractions decimals Real numbers Foundation Year Year 1 Year 2 Year 3 Year 4 Year 5 Year
The Australian Curriculum Mathematics Mathematics ACARA The Australian Curriculum Number Algebra Number place value Fractions decimals Real numbers Foundation Year Year 1 Year 2 Year 3 Year 4 Year 5 Year
ME 111: Engineering Drawing
 ME 111: Engineering Drawing Lecture # 14 (10/10/2011) Development of Surfaces http://www.iitg.ernet.in/arindam.dey/me111.htm http://www.iitg.ernet.in/rkbc/me111.htm http://shilloi.iitg.ernet.in/~psr/ Indian
ME 111: Engineering Drawing Lecture # 14 (10/10/2011) Development of Surfaces http://www.iitg.ernet.in/arindam.dey/me111.htm http://www.iitg.ernet.in/rkbc/me111.htm http://shilloi.iitg.ernet.in/~psr/ Indian
NURBS Drawing Week 5, Lecture 10
 CS 430/536 Computer Graphics I NURBS Drawing Week 5, Lecture 10 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel University
CS 430/536 Computer Graphics I NURBS Drawing Week 5, Lecture 10 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel University
VALLIAMMAI ENGNIEERING COLLEGE SRM Nagar, Kattankulathur 603203.
 VALLIAMMAI ENGNIEERING COLLEGE SRM Nagar, Kattankulathur 603203. DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING Year & Semester : III Year, V Semester Section : CSE - 1 & 2 Subject Code : CS6504 Subject
VALLIAMMAI ENGNIEERING COLLEGE SRM Nagar, Kattankulathur 603203. DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING Year & Semester : III Year, V Semester Section : CSE - 1 & 2 Subject Code : CS6504 Subject
Math 0980 Chapter Objectives. Chapter 1: Introduction to Algebra: The Integers.
 Math 0980 Chapter Objectives Chapter 1: Introduction to Algebra: The Integers. 1. Identify the place value of a digit. 2. Write a number in words or digits. 3. Write positive and negative numbers used
Math 0980 Chapter Objectives Chapter 1: Introduction to Algebra: The Integers. 1. Identify the place value of a digit. 2. Write a number in words or digits. 3. Write positive and negative numbers used
Traditional Drawing Tools
 Engineering Drawing Traditional Drawing Tools DRAWING TOOLS DRAWING TOOLS 1. T-Square 2. Triangles DRAWING TOOLS HB for thick line 2H for thin line 3. Adhesive Tape 4. Pencils DRAWING TOOLS 5. Sandpaper
Engineering Drawing Traditional Drawing Tools DRAWING TOOLS DRAWING TOOLS 1. T-Square 2. Triangles DRAWING TOOLS HB for thick line 2H for thin line 3. Adhesive Tape 4. Pencils DRAWING TOOLS 5. Sandpaper
Topics in Computer Graphics Chap 14: Tensor Product Patches
 Topics in Computer Graphics Chap 14: Tensor Product Patches fall, 2011 University of Seoul School of Computer Science Minho Kim Table of contents Bilinear Interpolation The Direct de Casteljau Algorithm
Topics in Computer Graphics Chap 14: Tensor Product Patches fall, 2011 University of Seoul School of Computer Science Minho Kim Table of contents Bilinear Interpolation The Direct de Casteljau Algorithm
Introduction to Computer Graphics
 Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 torsten@sfu.ca www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 torsten@sfu.ca www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
x 2 + y 2 = 1 y 1 = x 2 + 2x y = x 2 + 2x + 1
 Implicit Functions Defining Implicit Functions Up until now in this course, we have only talked about functions, which assign to every real number x in their domain exactly one real number f(x). The graphs
Implicit Functions Defining Implicit Functions Up until now in this course, we have only talked about functions, which assign to every real number x in their domain exactly one real number f(x). The graphs
Section 1.1. Introduction to R n
 The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
KEANSBURG SCHOOL DISTRICT KEANSBURG HIGH SCHOOL Mathematics Department. HSPA 10 Curriculum. September 2007
 KEANSBURG HIGH SCHOOL Mathematics Department HSPA 10 Curriculum September 2007 Written by: Karen Egan Mathematics Supervisor: Ann Gagliardi 7 days Sample and Display Data (Chapter 1 pp. 4-47) Surveys and
KEANSBURG HIGH SCHOOL Mathematics Department HSPA 10 Curriculum September 2007 Written by: Karen Egan Mathematics Supervisor: Ann Gagliardi 7 days Sample and Display Data (Chapter 1 pp. 4-47) Surveys and
Math Placement Test Study Guide. 2. The test consists entirely of multiple choice questions, each with five choices.
 Math Placement Test Study Guide General Characteristics of the Test 1. All items are to be completed by all students. The items are roughly ordered from elementary to advanced. The expectation is that
Math Placement Test Study Guide General Characteristics of the Test 1. All items are to be completed by all students. The items are roughly ordered from elementary to advanced. The expectation is that
RELEASED. Student Booklet. Precalculus. Fall 2014 NC Final Exam. Released Items
 Released Items Public Schools of North arolina State oard of Education epartment of Public Instruction Raleigh, North arolina 27699-6314 Fall 2014 N Final Exam Precalculus Student ooklet opyright 2014
Released Items Public Schools of North arolina State oard of Education epartment of Public Instruction Raleigh, North arolina 27699-6314 Fall 2014 N Final Exam Precalculus Student ooklet opyright 2014
Pro/ENGINEER Wildfire 4.0 Basic Design
 Introduction Datum features are non-solid features used during the construction of other features. The most common datum features include planes, axes, coordinate systems, and curves. Datum features do
Introduction Datum features are non-solid features used during the construction of other features. The most common datum features include planes, axes, coordinate systems, and curves. Datum features do
EL-9650/9600c/9450/9400 Handbook Vol. 1
 Graphing Calculator EL-9650/9600c/9450/9400 Handbook Vol. Algebra EL-9650 EL-9450 Contents. Linear Equations - Slope and Intercept of Linear Equations -2 Parallel and Perpendicular Lines 2. Quadratic Equations
Graphing Calculator EL-9650/9600c/9450/9400 Handbook Vol. Algebra EL-9650 EL-9450 Contents. Linear Equations - Slope and Intercept of Linear Equations -2 Parallel and Perpendicular Lines 2. Quadratic Equations
Trigonometric Functions and Equations
 Contents Trigonometric Functions and Equations Lesson 1 Reasoning with Trigonometric Functions Investigations 1 Proving Trigonometric Identities... 271 2 Sum and Difference Identities... 276 3 Extending
Contents Trigonometric Functions and Equations Lesson 1 Reasoning with Trigonometric Functions Investigations 1 Proving Trigonometric Identities... 271 2 Sum and Difference Identities... 276 3 Extending
Parametric Curves. (Com S 477/577 Notes) Yan-Bin Jia. Oct 8, 2015
 Yan-Bin Jia. Oct 8, 2015") Parametric Curves (Com S 477/577 Notes) Yan-Bin Jia Oct 8, 2015 1 Introduction A curve in R 2 (or R 3 ) is a differentiable function α : [a,b] R 2 (or R 3 ). The initial point is α[a] and the final point
Parametric Curves (Com S 477/577 Notes) Yan-Bin Jia Oct 8, 2015 1 Introduction A curve in R 2 (or R 3 ) is a differentiable function α : [a,b] R 2 (or R 3 ). The initial point is α[a] and the final point
SAT Subject Math Level 2 Facts & Formulas
 Numbers, Sequences, Factors Integers:..., -3, -2, -1, 0, 1, 2, 3,... Reals: integers plus fractions, decimals, and irrationals ( 2, 3, π, etc.) Order Of Operations: Arithmetic Sequences: PEMDAS (Parentheses
Numbers, Sequences, Factors Integers:..., -3, -2, -1, 0, 1, 2, 3,... Reals: integers plus fractions, decimals, and irrationals ( 2, 3, π, etc.) Order Of Operations: Arithmetic Sequences: PEMDAS (Parentheses
LEAVING CERT DCG SCHEME OF WORK
 2010-11 LEAVING CERT DCG SCHEME OF WORK ST OLIVER S COMMUNITY COLLEGE Mission statement The technology department aspires to provide a safe, stimulating environment where all students can develop their
2010-11 LEAVING CERT DCG SCHEME OF WORK ST OLIVER S COMMUNITY COLLEGE Mission statement The technology department aspires to provide a safe, stimulating environment where all students can develop their
Application. Outline. 3-1 Polynomial Functions 3-2 Finding Rational Zeros of. Polynomial. 3-3 Approximating Real Zeros of.
 Polynomial and Rational Functions Outline 3-1 Polynomial Functions 3-2 Finding Rational Zeros of Polynomials 3-3 Approximating Real Zeros of Polynomials 3-4 Rational Functions Chapter 3 Group Activity:
Polynomial and Rational Functions Outline 3-1 Polynomial Functions 3-2 Finding Rational Zeros of Polynomials 3-3 Approximating Real Zeros of Polynomials 3-4 Rational Functions Chapter 3 Group Activity:
Chapter 8 Geometry We will discuss following concepts in this chapter.
 Mat College Mathematics Updated on Nov 5, 009 Chapter 8 Geometry We will discuss following concepts in this chapter. Two Dimensional Geometry: Straight lines (parallel and perpendicular), Rays, Angles
Mat College Mathematics Updated on Nov 5, 009 Chapter 8 Geometry We will discuss following concepts in this chapter. Two Dimensional Geometry: Straight lines (parallel and perpendicular), Rays, Angles