Curves and Surfaces. Goals. How do we draw surfaces? How do we specify a surface? How do we approximate a surface?
|
|
|
- Arnold Moore
- 9 years ago
- Views:
Transcription
1 Curves and Surfaces Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces [Angel ] Goals How do we draw surfaces? Approximate with polygons Draw polygons How do we specify a surface? Explicit, implicit, parametric How do we approximate a surface? Interpolation (use only points) Hermite (use points and tangents) Bezier (use points, and more points for tangents) 1

2 Explicit Representation Curve in 2D: y = f(x) Curve in 3D: y = f(x), z = g(x) Surface in 3D: z = f(x,y) Problems: How about a vertical line x = c as y = f(x)? Circle y = f (r 2 x 2 ) 1/2 two or zero values for x Too dependent on coordinate system Rarely used in computer graphics Implicit Representation Curve in 2D: f(x,y) = 0 Line: ax + by + c = 0 Circle: x 2 + y 2 r 2 = 0 Surface in 3d: f(x,y,z) = 0 Plane: ax + by + cz + d = 0 Sphere: x 2 + y 2 + z 2 r 2 = 0 f(x,y,z) can describe 3D object: Inside: f(x,y,z) < 0 Surface: f(x,y,z) = 0 Outside: f(x,y,z) > 0 2
 = 0 Line: ax + by + c = 0 Circle: x 2 + y 2 r 2 = 0 Surface in 3d: f(x,y,z) = 0 Plane: ax + by + cz + d =")
3 What Implicit Functions are Good For X + kv F < 0? F = 0? F > 0? X F(X + kv) = 0 Ray - Surface Intersection Test Inside/Outside Test Isosurfaces of Simulated Tornado 3

4 Constructive Solid Geometry (CSG) Generate complex shapes with basic building blocks machine an object - saw parts off, drill holes glue pieces together This is sensible for objects that are actually made that way (human-made, particularly machined objects) A CSG Train Brian Wyvill & students, Univ. of Calgary 4
 A CSG Train Brian Wyvill & students, Univ.")
5 CSG: Negative Objects Use point-by-point boolean functions remove a volume by using a negative object e.g. drill a hole by subtracting a cylinder Subtract From To get Inside(BLOCK-CYL) = Inside(BLOCK) And Not(Inside(CYL)) CSG 5

6 CSG The Utah Teapot 6
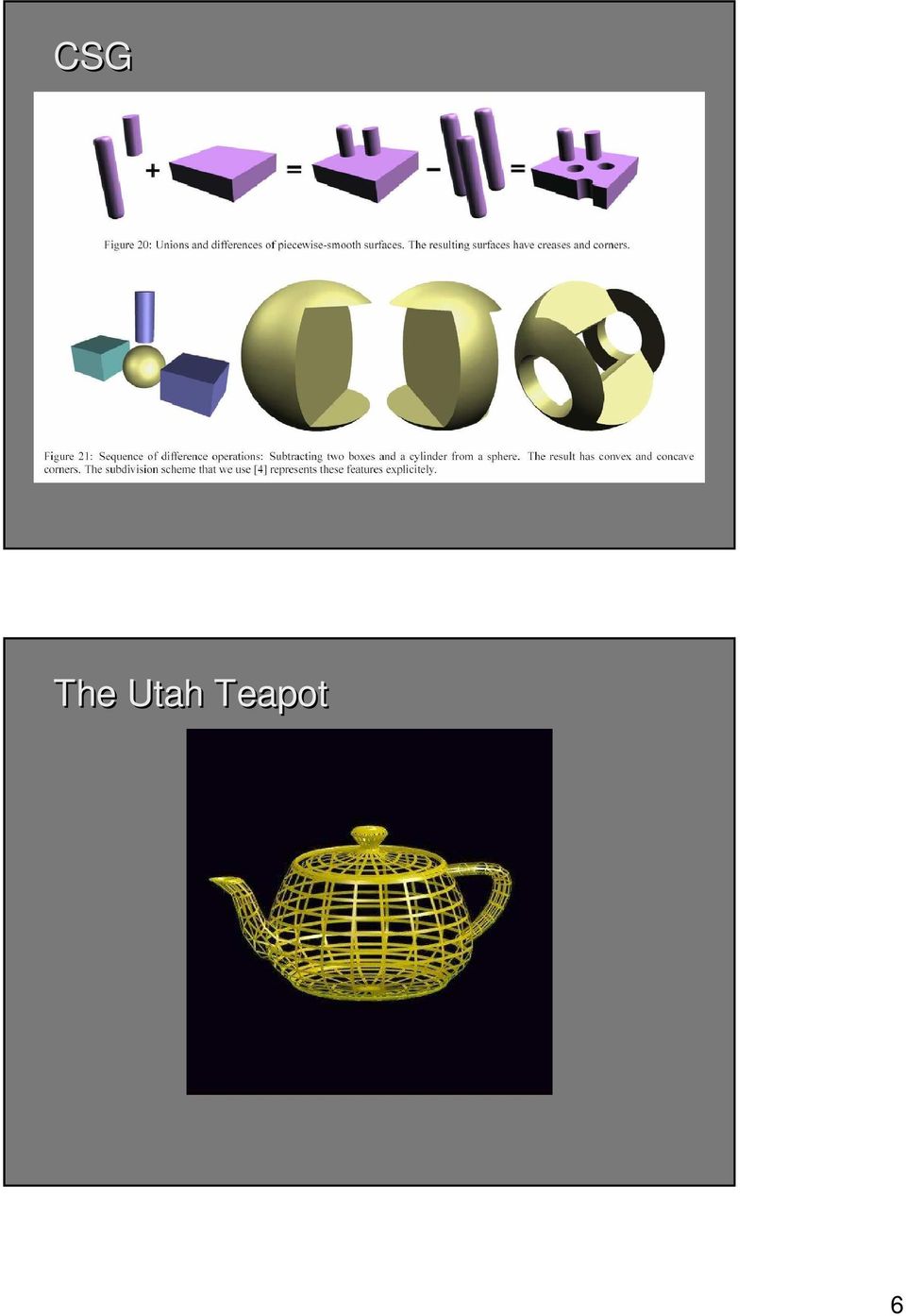
7 The Utah Teapot The Six Platonic Solids (by Jim Arvo and Dave Kirk, from their 87 SIGGRAPH paper Fast Ray Tracing by Ray Classification.) See for more history. The Utah Teapot 7
 See http://www.sjbaker.")
8 The teapot is just cubic Bezier patches! 8

9 Algebraic Surfaces Special case of implicit representation f(x,y,z) is polynomial in x, y, z Quadrics: degree of polynomial w 2 Render more efficiently than arbitrary surfaces Implicit form often used in computer graphics How do we represent curves implicitly? Parametric Form for Curves Curves: single parameter u (e.g. time) x = x(u), y = y(u), z = z(u) Circle: x = cos(u), y = sin(u), z = 0 Tangent described by derivative Magnitude is velocity 9

10 Parametric Form for Surfaces Use parameters u and v x = x(u,v), y = y(u,v), z = z(u,v) Describes surface as both u and v vary Partial derivatives describe tangent plane at each point p(u,v) = [x(u,v) y(u,v) z(u,v)] T Assessment of Parametric Forms Parameters often have natural meaning Easy to define and calculate Tangent and normal Curves segments (for example, 0 w u w 1) Surface patches (for example, 0 w u,v w 1) 10
![z(u,v)] T Assessment of Parametric Forms Parameters often have natural meaning Easy to define and](/docs-images/44/16245052/images/page_10.jpg "calculate Tangent and normal Curves segments (for example, 0 w u w 1) Surface patches (for example, 0 w")
11 Parametric Polynomial Curves Restrict x(u), y(u), z(u) to be polynomial in u Fix degree n Each c k is a column vector Parametric Polynomial Surfaces Restrict x(u,v), y(u,v), z(u,v) to be polynomial of fixed degree n Each c ik is a 3-element column vector Restrict to simple case where 0 w u,v w 1 11

12 Approximating Surfaces Use parametric polynomial surfaces Important concepts: Join points for segments and patches Control points to interpolate Tangents and smoothness Blending functions to describe interpolation First curves, then surfaces Outline Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces 12

13 Cubic Polynomial Form Degree 3 appears to be a useful compromise Curves: Each c k is a column vector [c kx c ky c kz ] T From control information (points, tangents) derive 12 values c kx, c ky, c kz for 0 w k w 3 These determine cubic polynomial form Interpolation by Cubic Polynomials Simplest case, although rarely used Curves: Given 4 control points p 0, p 1, p 2, p 3 All should lie on curve: 12 conditions, 12 unknowns Space 0 w u w 1 evenly p 0 = p(0), p 1 = p(1/3), p 2 = p(2/3), p 3 = p(1) 13
, p 1 = p(1/3), p 2 = p(2/3), p 3 =")
14 Equations to Determine c k Plug in values for u = 0, 1/3, 2/3, 1 Note: p k and c k are vectors! Interpolating Geometry Matrix Invert A to obtain interpolating geometry matrix 14

15 Joining Interpolating Segments Do not solve degree n for n points Divide into overlap sequences of 4 points p 0, p 1, p 2, p 3 then p 3, p 4, p 5, p 6, etc. At join points Will be continuous (C 0 continuity) Derivatives will usually not match (no C 1 continuity) Blending Functions Make explicit, how control points contribute Simplest example: straight line with control points p 0 and p 3 p(u) = (1 u) p 0 + u p 3 b 0 (u) = 1 u, b 3 (u) = u 1 b 0 (u) b 3 (u) 1 u 15

16 Blending Polynomials for Interpolation Each blending polynomial is a cubic Solve (see [Angel, p. 427]): Cubic Interpolation Patch Bicubic surface patch with 4 e 4 control points Note: each c ik is 3 column vector (48 unknowns) [Angel, Ch ] 16
![427]): Cubic Interpolation Patch Bicubic surface patch with 4](/docs-images/44/16245052/images/page_16.jpg "e 4 control points Note: each c ik is 3 column vector (48")
17 Outline Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces Hermite Curves Another cubic polynomial curve Specify two endpoints and their tangents 17

18 Deriving the Hermite Form As before Calculate derivative Yields Summary of Hermite Equations Write in matrix form Remember p k and p k and c k are vectors! Let q = [p 0 p 3 p 0 p 3 ] T and invert to find Hermite geometry matrix M H satisfying 18

19 Blending Functions Explicit Hermite geometry matrix Blending functions for u = [1 u u 2 u 3 ] T Join Points for Hermite Curves Match points and tangents (derivatives) Much smoother than point interpolation How to obtain the tangents? Skip Hermite surface patch More widely used: Bezier curves and surfaces 19

20 Parametric Continuity Matching endpoints (C 0 parametric continuity) Matching derivatives (C 1 parametric continuity) Geometric Continuity For matching tangents, less is required G 1 geometric continuity Extends to higher derivatives 20

21 Outline Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces Bezier Curves Widely used in computer graphics Approximate tangents by using control points 21
22 Equations for Bezier Curves Set up equations for cubic parametric curve Recall: Solve for c k Bezier Geometry Matrix Calculate Bezier geometry matrix M B Have C 0 continuity, not C 1 continuity Have C 1 continuity with additional condition 22
23 Blending Polynomials Determine contribution of each control point Smooth blending polynomials Convex Hull Property Bezier curve contained entirely in convex hull of control points Determined choice of tangent coefficient (?) 23
24 Bezier Surface Patches Specify Bezier patch with 4 e 4 control points Bezier curves along the boundary Twist Inner points determine twist at corner Flat means p 00, p 10, p 01, p 11 in one plane (w 2 p/wuwv)(0,0) = 0 24
25 Summary Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces 25
Computer Graphics. Geometric Modeling. Page 1. Copyright Gotsman, Elber, Barequet, Karni, Sheffer Computer Science - Technion. An Example.
 An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
Computer Graphics CS 543 Lecture 12 (Part 1) Curves. Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)
 Curves. Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)") Computer Graphics CS 54 Lecture 1 (Part 1) Curves Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) So Far Dealt with straight lines and flat surfaces Real world objects include
Computer Graphics CS 54 Lecture 1 (Part 1) Curves Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) So Far Dealt with straight lines and flat surfaces Real world objects include
We can display an object on a monitor screen in three different computer-model forms: Wireframe model Surface Model Solid model
 CHAPTER 4 CURVES 4.1 Introduction In order to understand the significance of curves, we should look into the types of model representations that are used in geometric modeling. Curves play a very significant
CHAPTER 4 CURVES 4.1 Introduction In order to understand the significance of curves, we should look into the types of model representations that are used in geometric modeling. Curves play a very significant
Geometric Modelling & Curves
 Geometric Modelling & Curves Geometric Modeling Creating symbolic models of the physical world has long been a goal of mathematicians, scientists, engineers, etc. Recently technology has advanced sufficiently
Geometric Modelling & Curves Geometric Modeling Creating symbolic models of the physical world has long been a goal of mathematicians, scientists, engineers, etc. Recently technology has advanced sufficiently
(Refer Slide Time: 1:42)
") Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 10 Curves So today we are going to have a new topic. So far
Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 10 Curves So today we are going to have a new topic. So far
H.Calculating Normal Vectors
 Appendix H H.Calculating Normal Vectors This appendix describes how to calculate normal vectors for surfaces. You need to define normals to use the OpenGL lighting facility, which is described in Chapter
Appendix H H.Calculating Normal Vectors This appendix describes how to calculate normal vectors for surfaces. You need to define normals to use the OpenGL lighting facility, which is described in Chapter
CHAPTER 1 Splines and B-splines an Introduction
 CHAPTER 1 Splines and B-splines an Introduction In this first chapter, we consider the following fundamental problem: Given a set of points in the plane, determine a smooth curve that approximates the
CHAPTER 1 Splines and B-splines an Introduction In this first chapter, we consider the following fundamental problem: Given a set of points in the plane, determine a smooth curve that approximates the
Essential Mathematics for Computer Graphics fast
 John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
CSE 167: Lecture 13: Bézier Curves. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Lecture 13: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #6 due Friday, Nov 18
CSE 167: Introduction to Computer Graphics Lecture 13: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #6 due Friday, Nov 18
the points are called control points approximating curve
 Chapter 4 Spline Curves A spline curve is a mathematical representation for which it is easy to build an interface that will allow a user to design and control the shape of complex curves and surfaces.
Chapter 4 Spline Curves A spline curve is a mathematical representation for which it is easy to build an interface that will allow a user to design and control the shape of complex curves and surfaces.
Section 12.6: Directional Derivatives and the Gradient Vector
 Section 26: Directional Derivatives and the Gradient Vector Recall that if f is a differentiable function of x and y and z = f(x, y), then the partial derivatives f x (x, y) and f y (x, y) give the rate
Section 26: Directional Derivatives and the Gradient Vector Recall that if f is a differentiable function of x and y and z = f(x, y), then the partial derivatives f x (x, y) and f y (x, y) give the rate
BEZIER CURVES AND SURFACES
 Department of Applied Mathematics and Computational Sciences University of Cantabria UC-CAGD Group COMPUTER-AIDED GEOMETRIC DESIGN AND COMPUTER GRAPHICS: BEZIER CURVES AND SURFACES Andrés Iglesias e-mail:
Department of Applied Mathematics and Computational Sciences University of Cantabria UC-CAGD Group COMPUTER-AIDED GEOMETRIC DESIGN AND COMPUTER GRAPHICS: BEZIER CURVES AND SURFACES Andrés Iglesias e-mail:
Computer Aided Design (CAD)
") 16.810 Engineering Design and Rapid Prototyping Lecture 4 Computer Aided Design (CAD) Instructor(s) Prof. Olivier de Weck January 6, 2005 Plan for Today CAD Lecture (ca. 50 min) CAD History, Background
16.810 Engineering Design and Rapid Prototyping Lecture 4 Computer Aided Design (CAD) Instructor(s) Prof. Olivier de Weck January 6, 2005 Plan for Today CAD Lecture (ca. 50 min) CAD History, Background
The Essentials of CAGD
 The Essentials of CAGD Chapter 2: Lines and Planes Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford
The Essentials of CAGD Chapter 2: Lines and Planes Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford
(a) We have x = 3 + 2t, y = 2 t, z = 6 so solving for t we get the symmetric equations. x 3 2. = 2 y, z = 6. t 2 2t + 1 = 0,
 We have x = 3 + 2t, y = 2 t, z = 6 so solving for t we get the symmetric equations. x 3 2. = 2 y, z = 6. t 2 2t + 1 = 0,") Name: Solutions to Practice Final. Consider the line r(t) = 3 + t, t, 6. (a) Find symmetric equations for this line. (b) Find the point where the first line r(t) intersects the surface z = x + y. (a) We
Name: Solutions to Practice Final. Consider the line r(t) = 3 + t, t, 6. (a) Find symmetric equations for this line. (b) Find the point where the first line r(t) intersects the surface z = x + y. (a) We
Introduction to Algebraic Geometry. Bézout s Theorem and Inflection Points
 Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
Figure 2.1: Center of mass of four points.
 Chapter 2 Bézier curves are named after their inventor, Dr. Pierre Bézier. Bézier was an engineer with the Renault car company and set out in the early 196 s to develop a curve formulation which would
Chapter 2 Bézier curves are named after their inventor, Dr. Pierre Bézier. Bézier was an engineer with the Renault car company and set out in the early 196 s to develop a curve formulation which would
Dhiren Bhatia Carnegie Mellon University
 Dhiren Bhatia Carnegie Mellon University University Course Evaluations available online Please Fill! December 4 : In-class final exam Held during class time All students expected to give final this date
Dhiren Bhatia Carnegie Mellon University University Course Evaluations available online Please Fill! December 4 : In-class final exam Held during class time All students expected to give final this date
Math 241, Exam 1 Information.
 Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
How To Use Design Mentor
 DesignMentor: A Pedagogical Tool for Computer Graphics and Computer Aided Design John L. Lowther and Ching Kuang Shene Programmers: Yuan Zhao and Yan Zhou (ver 1) Budirijanto Purnomo (ver 2) Michigan Technological
DesignMentor: A Pedagogical Tool for Computer Graphics and Computer Aided Design John L. Lowther and Ching Kuang Shene Programmers: Yuan Zhao and Yan Zhou (ver 1) Budirijanto Purnomo (ver 2) Michigan Technological
Computer Aided Design (CAD)
") 16.810 Engineering Design and Rapid Prototyping Lecture 3a Computer Aided Design (CAD) Instructor(s) Prof. Olivier de Weck January 16, 2007 Plan for Today CAD Lecture (ca. 50 min) CAD History, Background
16.810 Engineering Design and Rapid Prototyping Lecture 3a Computer Aided Design (CAD) Instructor(s) Prof. Olivier de Weck January 16, 2007 Plan for Today CAD Lecture (ca. 50 min) CAD History, Background
42 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE. Figure 1.18: Parabola y = 2x 2. 1.6.1 Brief review of Conic Sections
 2 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.18: Parabola y = 2 1.6 Quadric Surfaces 1.6.1 Brief review of Conic Sections You may need to review conic sections for this to make more sense. You
2 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.18: Parabola y = 2 1.6 Quadric Surfaces 1.6.1 Brief review of Conic Sections You may need to review conic sections for this to make more sense. You
Two vectors are equal if they have the same length and direction. They do not
 Vectors define vectors Some physical quantities, such as temperature, length, and mass, can be specified by a single number called a scalar. Other physical quantities, such as force and velocity, must
Vectors define vectors Some physical quantities, such as temperature, length, and mass, can be specified by a single number called a scalar. Other physical quantities, such as force and velocity, must
A QUICK GUIDE TO THE FORMULAS OF MULTIVARIABLE CALCULUS
 A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
Computer Animation: Art, Science and Criticism
 Computer Animation: Art, Science and Criticism Tom Ellman Harry Roseman Lecture 4 Parametric Curve A procedure for distorting a straight line into a (possibly) curved line. The procedure lives in a black
Computer Animation: Art, Science and Criticism Tom Ellman Harry Roseman Lecture 4 Parametric Curve A procedure for distorting a straight line into a (possibly) curved line. The procedure lives in a black
Modeling Curves and Surfaces
 Modeling Curves and Surfaces Graphics I Modeling for Computer Graphics!? 1 How can we generate this kind of objects? Umm!? Mathematical Modeling! S Do not worry too much about your difficulties in mathematics,
Modeling Curves and Surfaces Graphics I Modeling for Computer Graphics!? 1 How can we generate this kind of objects? Umm!? Mathematical Modeling! S Do not worry too much about your difficulties in mathematics,
Copyrighted Material. Chapter 1 DEGREE OF A CURVE
 Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
Solutions to old Exam 1 problems
 Solutions to old Exam 1 problems Hi students! I am putting this old version of my review for the first midterm review, place and time to be announced. Check for updates on the web site as to which sections
Solutions to old Exam 1 problems Hi students! I am putting this old version of my review for the first midterm review, place and time to be announced. Check for updates on the web site as to which sections
FINAL EXAM SOLUTIONS Math 21a, Spring 03
 INAL EXAM SOLUIONS Math 21a, Spring 3 Name: Start by printing your name in the above box and check your section in the box to the left. MW1 Ken Chung MW1 Weiyang Qiu MW11 Oliver Knill h1 Mark Lucianovic
INAL EXAM SOLUIONS Math 21a, Spring 3 Name: Start by printing your name in the above box and check your section in the box to the left. MW1 Ken Chung MW1 Weiyang Qiu MW11 Oliver Knill h1 Mark Lucianovic
Exam 1 Sample Question SOLUTIONS. y = 2x
 Exam Sample Question SOLUTIONS. Eliminate the parameter to find a Cartesian equation for the curve: x e t, y e t. SOLUTION: You might look at the coordinates and notice that If you don t see it, we can
Exam Sample Question SOLUTIONS. Eliminate the parameter to find a Cartesian equation for the curve: x e t, y e t. SOLUTION: You might look at the coordinates and notice that If you don t see it, we can
Solving Simultaneous Equations and Matrices
 Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
11.1. Objectives. Component Form of a Vector. Component Form of a Vector. Component Form of a Vector. Vectors and the Geometry of Space
 11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
GRADES 7, 8, AND 9 BIG IDEAS
 Table 1: Strand A: BIG IDEAS: MATH: NUMBER Introduce perfect squares, square roots, and all applications Introduce rational numbers (positive and negative) Introduce the meaning of negative exponents for
Table 1: Strand A: BIG IDEAS: MATH: NUMBER Introduce perfect squares, square roots, and all applications Introduce rational numbers (positive and negative) Introduce the meaning of negative exponents for
DERIVATIVES AS MATRICES; CHAIN RULE
 DERIVATIVES AS MATRICES; CHAIN RULE 1. Derivatives of Real-valued Functions Let s first consider functions f : R 2 R. Recall that if the partial derivatives of f exist at the point (x 0, y 0 ), then we
DERIVATIVES AS MATRICES; CHAIN RULE 1. Derivatives of Real-valued Functions Let s first consider functions f : R 2 R. Recall that if the partial derivatives of f exist at the point (x 0, y 0 ), then we
Name Class. Date Section. Test Form A Chapter 11. Chapter 11 Test Bank 155
 Chapter Test Bank 55 Test Form A Chapter Name Class Date Section. Find a unit vector in the direction of v if v is the vector from P,, 3 to Q,, 0. (a) 3i 3j 3k (b) i j k 3 i 3 j 3 k 3 i 3 j 3 k. Calculate
Chapter Test Bank 55 Test Form A Chapter Name Class Date Section. Find a unit vector in the direction of v if v is the vector from P,, 3 to Q,, 0. (a) 3i 3j 3k (b) i j k 3 i 3 j 3 k 3 i 3 j 3 k. Calculate
A vector is a directed line segment used to represent a vector quantity.
 Chapters and 6 Introduction to Vectors A vector quantity has direction and magnitude. There are many examples of vector quantities in the natural world, such as force, velocity, and acceleration. A vector
Chapters and 6 Introduction to Vectors A vector quantity has direction and magnitude. There are many examples of vector quantities in the natural world, such as force, velocity, and acceleration. A vector
TEXTURE AND BUMP MAPPING
 Department of Applied Mathematics and Computational Sciences University of Cantabria UC-CAGD Group COMPUTER-AIDED GEOMETRIC DESIGN AND COMPUTER GRAPHICS: TEXTURE AND BUMP MAPPING Andrés Iglesias e-mail:
Department of Applied Mathematics and Computational Sciences University of Cantabria UC-CAGD Group COMPUTER-AIDED GEOMETRIC DESIGN AND COMPUTER GRAPHICS: TEXTURE AND BUMP MAPPING Andrés Iglesias e-mail:
Solutions for Review Problems
 olutions for Review Problems 1. Let be the triangle with vertices A (,, ), B (4,, 1) and C (,, 1). (a) Find the cosine of the angle BAC at vertex A. (b) Find the area of the triangle ABC. (c) Find a vector
olutions for Review Problems 1. Let be the triangle with vertices A (,, ), B (4,, 1) and C (,, 1). (a) Find the cosine of the angle BAC at vertex A. (b) Find the area of the triangle ABC. (c) Find a vector
4.3 Lagrange Approximation
 206 CHAP. 4 INTERPOLATION AND POLYNOMIAL APPROXIMATION Lagrange Polynomial Approximation 4.3 Lagrange Approximation Interpolation means to estimate a missing function value by taking a weighted average
206 CHAP. 4 INTERPOLATION AND POLYNOMIAL APPROXIMATION Lagrange Polynomial Approximation 4.3 Lagrange Approximation Interpolation means to estimate a missing function value by taking a weighted average
Indicator 2: Use a variety of algebraic concepts and methods to solve equations and inequalities.
 3 rd Grade Math Learning Targets Algebra: Indicator 1: Use procedures to transform algebraic expressions. 3.A.1.1. Students are able to explain the relationship between repeated addition and multiplication.
3 rd Grade Math Learning Targets Algebra: Indicator 1: Use procedures to transform algebraic expressions. 3.A.1.1. Students are able to explain the relationship between repeated addition and multiplication.
Fundamental Theorems of Vector Calculus
 Fundamental Theorems of Vector Calculus We have studied the techniques for evaluating integrals over curves and surfaces. In the case of integrating over an interval on the real line, we were able to use
Fundamental Theorems of Vector Calculus We have studied the techniques for evaluating integrals over curves and surfaces. In the case of integrating over an interval on the real line, we were able to use
3. Interpolation. Closing the Gaps of Discretization... Beyond Polynomials
 3. Interpolation Closing the Gaps of Discretization... Beyond Polynomials Closing the Gaps of Discretization... Beyond Polynomials, December 19, 2012 1 3.3. Polynomial Splines Idea of Polynomial Splines
3. Interpolation Closing the Gaps of Discretization... Beyond Polynomials Closing the Gaps of Discretization... Beyond Polynomials, December 19, 2012 1 3.3. Polynomial Splines Idea of Polynomial Splines
2013 MBA Jump Start Program
 2013 MBA Jump Start Program Module 2: Mathematics Thomas Gilbert Mathematics Module Algebra Review Calculus Permutations and Combinations [Online Appendix: Basic Mathematical Concepts] 2 1 Equation of
2013 MBA Jump Start Program Module 2: Mathematics Thomas Gilbert Mathematics Module Algebra Review Calculus Permutations and Combinations [Online Appendix: Basic Mathematical Concepts] 2 1 Equation of
1. Abstract 2. Introduction 3. Algorithms and Techniques
 MS PROJECT Virtual Surgery Piyush Soni under the guidance of Dr. Jarek Rossignac, Brian Whited Georgia Institute of Technology, Graphics, Visualization and Usability Center Atlanta, GA [email protected],
MS PROJECT Virtual Surgery Piyush Soni under the guidance of Dr. Jarek Rossignac, Brian Whited Georgia Institute of Technology, Graphics, Visualization and Usability Center Atlanta, GA [email protected],
Equations of Lines and Planes
 Calculus 3 Lia Vas Equations of Lines and Planes Planes. A plane is uniquely determined by a point in it and a vector perpendicular to it. An equation of the plane passing the point (x 0, y 0, z 0 ) perpendicular
Calculus 3 Lia Vas Equations of Lines and Planes Planes. A plane is uniquely determined by a point in it and a vector perpendicular to it. An equation of the plane passing the point (x 0, y 0, z 0 ) perpendicular
Intersection of a Line and a Convex. Hull of Points Cloud
 Applied Mathematical Sciences, Vol. 7, 213, no. 13, 5139-5149 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/1.12988/ams.213.37372 Intersection of a Line and a Convex Hull of Points Cloud R. P. Koptelov
Applied Mathematical Sciences, Vol. 7, 213, no. 13, 5139-5149 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/1.12988/ams.213.37372 Intersection of a Line and a Convex Hull of Points Cloud R. P. Koptelov
MATH 304 Linear Algebra Lecture 9: Subspaces of vector spaces (continued). Span. Spanning set.
. Span. Spanning set.") MATH 304 Linear Algebra Lecture 9: Subspaces of vector spaces (continued). Span. Spanning set. Vector space A vector space is a set V equipped with two operations, addition V V (x,y) x + y V and scalar
MATH 304 Linear Algebra Lecture 9: Subspaces of vector spaces (continued). Span. Spanning set. Vector space A vector space is a set V equipped with two operations, addition V V (x,y) x + y V and scalar
Content. Chapter 4 Functions 61 4.1 Basic concepts on real functions 62. Credits 11
 Content Credits 11 Chapter 1 Arithmetic Refresher 13 1.1 Algebra 14 Real Numbers 14 Real Polynomials 19 1.2 Equations in one variable 21 Linear Equations 21 Quadratic Equations 22 1.3 Exercises 28 Chapter
Content Credits 11 Chapter 1 Arithmetic Refresher 13 1.1 Algebra 14 Real Numbers 14 Real Polynomials 19 1.2 Equations in one variable 21 Linear Equations 21 Quadratic Equations 22 1.3 Exercises 28 Chapter
Microeconomic Theory: Basic Math Concepts
 Microeconomic Theory: Basic Math Concepts Matt Van Essen University of Alabama Van Essen (U of A) Basic Math Concepts 1 / 66 Basic Math Concepts In this lecture we will review some basic mathematical concepts
Microeconomic Theory: Basic Math Concepts Matt Van Essen University of Alabama Van Essen (U of A) Basic Math Concepts 1 / 66 Basic Math Concepts In this lecture we will review some basic mathematical concepts
Volumes of Revolution
 Mathematics Volumes of Revolution About this Lesson This lesson provides students with a physical method to visualize -dimensional solids and a specific procedure to sketch a solid of revolution. Students
Mathematics Volumes of Revolution About this Lesson This lesson provides students with a physical method to visualize -dimensional solids and a specific procedure to sketch a solid of revolution. Students
Section 13.5 Equations of Lines and Planes
 Section 13.5 Equations of Lines and Planes Generalizing Linear Equations One of the main aspects of single variable calculus was approximating graphs of functions by lines - specifically, tangent lines.
Section 13.5 Equations of Lines and Planes Generalizing Linear Equations One of the main aspects of single variable calculus was approximating graphs of functions by lines - specifically, tangent lines.
B2.53-R3: COMPUTER GRAPHICS. NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions.
 B2.53-R3: COMPUTER GRAPHICS NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions. 2. PART ONE is to be answered in the TEAR-OFF ANSWER
B2.53-R3: COMPUTER GRAPHICS NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions. 2. PART ONE is to be answered in the TEAR-OFF ANSWER
Practical Grid Generation Tools with Applications to Ship Hydrodynamics
 Practical Grid Generation Tools with Applications to Ship Hydrodynamics Eça L. Instituto Superior Técnico [email protected] Hoekstra M. Maritime Research Institute Netherlands [email protected] Windt
Practical Grid Generation Tools with Applications to Ship Hydrodynamics Eça L. Instituto Superior Técnico [email protected] Hoekstra M. Maritime Research Institute Netherlands [email protected] Windt
Solution of Linear Systems
 Chapter 3 Solution of Linear Systems In this chapter we study algorithms for possibly the most commonly occurring problem in scientific computing, the solution of linear systems of equations. We start
Chapter 3 Solution of Linear Systems In this chapter we study algorithms for possibly the most commonly occurring problem in scientific computing, the solution of linear systems of equations. We start
Finite Element Formulation for Plates - Handout 3 -
 Finite Element Formulation for Plates - Handout 3 - Dr Fehmi Cirak (fc286@) Completed Version Definitions A plate is a three dimensional solid body with one of the plate dimensions much smaller than the
Finite Element Formulation for Plates - Handout 3 - Dr Fehmi Cirak (fc286@) Completed Version Definitions A plate is a three dimensional solid body with one of the plate dimensions much smaller than the
8. Linear least-squares
 8. Linear least-squares EE13 (Fall 211-12) definition examples and applications solution of a least-squares problem, normal equations 8-1 Definition overdetermined linear equations if b range(a), cannot
8. Linear least-squares EE13 (Fall 211-12) definition examples and applications solution of a least-squares problem, normal equations 8-1 Definition overdetermined linear equations if b range(a), cannot
Introduction to Computer Graphics
 Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 [email protected] www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 [email protected] www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Chapter 13. Curves and Surfaces
 Chapter 13 Curves and Surfaces There are two fundamental problems with surfaces in machine vision: reconstruction and segmentation. Surfaces must be reconstructed from sparse depth measurements that may
Chapter 13 Curves and Surfaces There are two fundamental problems with surfaces in machine vision: reconstruction and segmentation. Surfaces must be reconstructed from sparse depth measurements that may
Computational Geometry. Lecture 1: Introduction and Convex Hulls
 Lecture 1: Introduction and convex hulls 1 Geometry: points, lines,... Plane (two-dimensional), R 2 Space (three-dimensional), R 3 Space (higher-dimensional), R d A point in the plane, 3-dimensional space,
Lecture 1: Introduction and convex hulls 1 Geometry: points, lines,... Plane (two-dimensional), R 2 Space (three-dimensional), R 3 Space (higher-dimensional), R d A point in the plane, 3-dimensional space,
Section 1.1. Introduction to R n
 The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
Surface Normals and Tangent Planes
 Surface Normals and Tangent Planes Normal and Tangent Planes to Level Surfaces Because the equation of a plane requires a point and a normal vector to the plane, nding the equation of a tangent plane to
Surface Normals and Tangent Planes Normal and Tangent Planes to Level Surfaces Because the equation of a plane requires a point and a normal vector to the plane, nding the equation of a tangent plane to
Dual Marching Cubes: Primal Contouring of Dual Grids
 Dual Marching Cubes: Primal Contouring of Dual Grids Scott Schaefer and Joe Warren Rice University 6100 Main St. Houston, TX 77005 [email protected] and [email protected] Abstract We present a method for
Dual Marching Cubes: Primal Contouring of Dual Grids Scott Schaefer and Joe Warren Rice University 6100 Main St. Houston, TX 77005 [email protected] and [email protected] Abstract We present a method for
Duality in General Programs. Ryan Tibshirani Convex Optimization 10-725/36-725
 Duality in General Programs Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: duality in linear programs Given c R n, A R m n, b R m, G R r n, h R r : min x R n c T x max u R m, v R r b T
Duality in General Programs Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: duality in linear programs Given c R n, A R m n, b R m, G R r n, h R r : min x R n c T x max u R m, v R r b T
GeoGebra. 10 lessons. Gerrit Stols
 GeoGebra in 10 lessons Gerrit Stols Acknowledgements GeoGebra is dynamic mathematics open source (free) software for learning and teaching mathematics in schools. It was developed by Markus Hohenwarter
GeoGebra in 10 lessons Gerrit Stols Acknowledgements GeoGebra is dynamic mathematics open source (free) software for learning and teaching mathematics in schools. It was developed by Markus Hohenwarter
An Overview of the Finite Element Analysis
 CHAPTER 1 An Overview of the Finite Element Analysis 1.1 Introduction Finite element analysis (FEA) involves solution of engineering problems using computers. Engineering structures that have complex geometry
CHAPTER 1 An Overview of the Finite Element Analysis 1.1 Introduction Finite element analysis (FEA) involves solution of engineering problems using computers. Engineering structures that have complex geometry
13.4 THE CROSS PRODUCT
 710 Chapter Thirteen A FUNDAMENTAL TOOL: VECTORS 62. Use the following steps and the results of Problems 59 60 to show (without trigonometry) that the geometric and algebraic definitions of the dot product
710 Chapter Thirteen A FUNDAMENTAL TOOL: VECTORS 62. Use the following steps and the results of Problems 59 60 to show (without trigonometry) that the geometric and algebraic definitions of the dot product
Abstract. These two vectors define a plane tangent to the surface at that point. Their cross product is Recent work in computer graphics has been
 Abstract SIMULATION OF WRINKLED SURFACES James F. Blinn Caltech/JPL Computer generated shaded images have reached an impressive degree of realism with the current state of the art. They are not so realistic,
Abstract SIMULATION OF WRINKLED SURFACES James F. Blinn Caltech/JPL Computer generated shaded images have reached an impressive degree of realism with the current state of the art. They are not so realistic,
CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION 1. BASIC DIVISIBILITY THEORY
 January 10, 2010 CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION 1. BASIC DIVISIBILITY THEORY The set of polynomials over a field F is a ring, whose structure shares with the ring of integers many characteristics.
January 10, 2010 CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION 1. BASIC DIVISIBILITY THEORY The set of polynomials over a field F is a ring, whose structure shares with the ring of integers many characteristics.
Algebra 1 2008. Academic Content Standards Grade Eight and Grade Nine Ohio. Grade Eight. Number, Number Sense and Operations Standard
 Academic Content Standards Grade Eight and Grade Nine Ohio Algebra 1 2008 Grade Eight STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express
Academic Content Standards Grade Eight and Grade Nine Ohio Algebra 1 2008 Grade Eight STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express
What are the place values to the left of the decimal point and their associated powers of ten?
 The verbal answers to all of the following questions should be memorized before completion of algebra. Answers that are not memorized will hinder your ability to succeed in geometry and algebra. (Everything
The verbal answers to all of the following questions should be memorized before completion of algebra. Answers that are not memorized will hinder your ability to succeed in geometry and algebra. (Everything
If Σ is an oriented surface bounded by a curve C, then the orientation of Σ induces an orientation for C, based on the Right-Hand-Rule.
 Oriented Surfaces and Flux Integrals Let be a surface that has a tangent plane at each of its nonboundary points. At such a point on the surface two unit normal vectors exist, and they have opposite directions.
Oriented Surfaces and Flux Integrals Let be a surface that has a tangent plane at each of its nonboundary points. At such a point on the surface two unit normal vectors exist, and they have opposite directions.
Parametric Curves. (Com S 477/577 Notes) Yan-Bin Jia. Oct 8, 2015
 Yan-Bin Jia. Oct 8, 2015") Parametric Curves (Com S 477/577 Notes) Yan-Bin Jia Oct 8, 2015 1 Introduction A curve in R 2 (or R 3 ) is a differentiable function α : [a,b] R 2 (or R 3 ). The initial point is α[a] and the final point
Parametric Curves (Com S 477/577 Notes) Yan-Bin Jia Oct 8, 2015 1 Introduction A curve in R 2 (or R 3 ) is a differentiable function α : [a,b] R 2 (or R 3 ). The initial point is α[a] and the final point
MA 323 Geometric Modelling Course Notes: Day 02 Model Construction Problem
 MA 323 Geometric Modelling Course Notes: Day 02 Model Construction Problem David L. Finn November 30th, 2004 In the next few days, we will introduce some of the basic problems in geometric modelling, and
MA 323 Geometric Modelling Course Notes: Day 02 Model Construction Problem David L. Finn November 30th, 2004 In the next few days, we will introduce some of the basic problems in geometric modelling, and
A Short Introduction to Computer Graphics
 A Short Introduction to Computer Graphics Frédo Durand MIT Laboratory for Computer Science 1 Introduction Chapter I: Basics Although computer graphics is a vast field that encompasses almost any graphical
A Short Introduction to Computer Graphics Frédo Durand MIT Laboratory for Computer Science 1 Introduction Chapter I: Basics Although computer graphics is a vast field that encompasses almost any graphical
Activity Set 4. Trainer Guide
 Geometry and Measurement of Solid Figures Activity Set 4 Trainer Guide Mid_SGe_04_TG Copyright by the McGraw-Hill Companies McGraw-Hill Professional Development GEOMETRY AND MEASUREMENT OF SOLID FIGURES
Geometry and Measurement of Solid Figures Activity Set 4 Trainer Guide Mid_SGe_04_TG Copyright by the McGraw-Hill Companies McGraw-Hill Professional Development GEOMETRY AND MEASUREMENT OF SOLID FIGURES
In mathematics, there are four attainment targets: using and applying mathematics; number and algebra; shape, space and measures, and handling data.
 MATHEMATICS: THE LEVEL DESCRIPTIONS In mathematics, there are four attainment targets: using and applying mathematics; number and algebra; shape, space and measures, and handling data. Attainment target
MATHEMATICS: THE LEVEL DESCRIPTIONS In mathematics, there are four attainment targets: using and applying mathematics; number and algebra; shape, space and measures, and handling data. Attainment target
Biggar High School Mathematics Department. National 5 Learning Intentions & Success Criteria: Assessing My Progress
 Biggar High School Mathematics Department National 5 Learning Intentions & Success Criteria: Assessing My Progress Expressions & Formulae Topic Learning Intention Success Criteria I understand this Approximation
Biggar High School Mathematics Department National 5 Learning Intentions & Success Criteria: Assessing My Progress Expressions & Formulae Topic Learning Intention Success Criteria I understand this Approximation
FURTHER VECTORS (MEI)
") Mathematics Revision Guides Further Vectors (MEI) (column notation) Page of MK HOME TUITION Mathematics Revision Guides Level: AS / A Level - MEI OCR MEI: C FURTHER VECTORS (MEI) Version : Date: -9-7 Mathematics
Mathematics Revision Guides Further Vectors (MEI) (column notation) Page of MK HOME TUITION Mathematics Revision Guides Level: AS / A Level - MEI OCR MEI: C FURTHER VECTORS (MEI) Version : Date: -9-7 Mathematics
Lecture 2: Homogeneous Coordinates, Lines and Conics
 Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
Selective Degree Elevation for Multi-Sided Bézier Patches
 EUROGRAPHICS 2015 / O. Sorkine-Hornung and M. Wimmer (Guest Editors) Volume 34 (2015), Number 2 Selective Degree Elevation for Multi-Sided Bézier Patches J. Smith 1 and S. Schaefer 1 1 Texas A&M University
EUROGRAPHICS 2015 / O. Sorkine-Hornung and M. Wimmer (Guest Editors) Volume 34 (2015), Number 2 Selective Degree Elevation for Multi-Sided Bézier Patches J. Smith 1 and S. Schaefer 1 1 Texas A&M University
Planar Curve Intersection
 Chapter 7 Planar Curve Intersection Curve intersection involves finding the points at which two planar curves intersect. If the two curves are parametric, the solution also identifies the parameter values
Chapter 7 Planar Curve Intersection Curve intersection involves finding the points at which two planar curves intersect. If the two curves are parametric, the solution also identifies the parameter values
Systems of Linear Equations
 Systems of Linear Equations Beifang Chen Systems of linear equations Linear systems A linear equation in variables x, x,, x n is an equation of the form a x + a x + + a n x n = b, where a, a,, a n and
Systems of Linear Equations Beifang Chen Systems of linear equations Linear systems A linear equation in variables x, x,, x n is an equation of the form a x + a x + + a n x n = b, where a, a,, a n and
Section 3.2 Polynomial Functions and Their Graphs
 Section 3.2 Polynomial Functions and Their Graphs EXAMPLES: P(x) = 3, Q(x) = 4x 7, R(x) = x 2 +x, S(x) = 2x 3 6x 2 10 QUESTION: Which of the following are polynomial functions? (a) f(x) = x 3 +2x+4 (b)
Section 3.2 Polynomial Functions and Their Graphs EXAMPLES: P(x) = 3, Q(x) = 4x 7, R(x) = x 2 +x, S(x) = 2x 3 6x 2 10 QUESTION: Which of the following are polynomial functions? (a) f(x) = x 3 +2x+4 (b)
A Geometric Characterization of Parametric Cubic Curves
 A Geometric Characterization of Parametric Cubic Curves MAUREEN C. STONE Xerox PARC and TONY D. DEROSE University of Washington In this paper, we analyze planar parametric cubic curves to determine conditions
A Geometric Characterization of Parametric Cubic Curves MAUREEN C. STONE Xerox PARC and TONY D. DEROSE University of Washington In this paper, we analyze planar parametric cubic curves to determine conditions
Determine whether the following lines intersect, are parallel, or skew. L 1 : x = 6t y = 1 + 9t z = 3t. x = 1 + 2s y = 4 3s z = s
 Homework Solutions 5/20 10.5.17 Determine whether the following lines intersect, are parallel, or skew. L 1 : L 2 : x = 6t y = 1 + 9t z = 3t x = 1 + 2s y = 4 3s z = s A vector parallel to L 1 is 6, 9,
Homework Solutions 5/20 10.5.17 Determine whether the following lines intersect, are parallel, or skew. L 1 : L 2 : x = 6t y = 1 + 9t z = 3t x = 1 + 2s y = 4 3s z = s A vector parallel to L 1 is 6, 9,
Level Set Framework, Signed Distance Function, and Various Tools
 Level Set Framework Geometry and Calculus Tools Level Set Framework,, and Various Tools Spencer Department of Mathematics Brigham Young University Image Processing Seminar (Week 3), 2010 Level Set Framework
Level Set Framework Geometry and Calculus Tools Level Set Framework,, and Various Tools Spencer Department of Mathematics Brigham Young University Image Processing Seminar (Week 3), 2010 Level Set Framework
Largest Fixed-Aspect, Axis-Aligned Rectangle
 Largest Fixed-Aspect, Axis-Aligned Rectangle David Eberly Geometric Tools, LLC http://www.geometrictools.com/ Copyright c 1998-2016. All Rights Reserved. Created: February 21, 2004 Last Modified: February
Largest Fixed-Aspect, Axis-Aligned Rectangle David Eberly Geometric Tools, LLC http://www.geometrictools.com/ Copyright c 1998-2016. All Rights Reserved. Created: February 21, 2004 Last Modified: February
Review Sheet for Test 1
 Review Sheet for Test 1 Math 261-00 2 6 2004 These problems are provided to help you study. The presence of a problem on this handout does not imply that there will be a similar problem on the test. And
Review Sheet for Test 1 Math 261-00 2 6 2004 These problems are provided to help you study. The presence of a problem on this handout does not imply that there will be a similar problem on the test. And
Review of Fundamental Mathematics
 Review of Fundamental Mathematics As explained in the Preface and in Chapter 1 of your textbook, managerial economics applies microeconomic theory to business decision making. The decision-making tools
Review of Fundamental Mathematics As explained in the Preface and in Chapter 1 of your textbook, managerial economics applies microeconomic theory to business decision making. The decision-making tools
discuss how to describe points, lines and planes in 3 space.
 Chapter 2 3 Space: lines and planes In this chapter we discuss how to describe points, lines and planes in 3 space. introduce the language of vectors. discuss various matters concerning the relative position
Chapter 2 3 Space: lines and planes In this chapter we discuss how to describe points, lines and planes in 3 space. introduce the language of vectors. discuss various matters concerning the relative position
1 VECTOR SPACES AND SUBSPACES
 1 VECTOR SPACES AND SUBSPACES What is a vector? Many are familiar with the concept of a vector as: Something which has magnitude and direction. an ordered pair or triple. a description for quantities such
1 VECTOR SPACES AND SUBSPACES What is a vector? Many are familiar with the concept of a vector as: Something which has magnitude and direction. an ordered pair or triple. a description for quantities such
How To Model Surfaces With Rp
 Models of surfaces by 3D printing 17/10/2007 Gregorio Franzoni Università di Cagliari Dip. di Matematica e Informatica 1 Models of mathematical objects Why producing visual and physical models? Fields
Models of surfaces by 3D printing 17/10/2007 Gregorio Franzoni Università di Cagliari Dip. di Matematica e Informatica 1 Models of mathematical objects Why producing visual and physical models? Fields
Linear Programming Problems
 Linear Programming Problems Linear programming problems come up in many applications. In a linear programming problem, we have a function, called the objective function, which depends linearly on a number
Linear Programming Problems Linear programming problems come up in many applications. In a linear programming problem, we have a function, called the objective function, which depends linearly on a number
MATH2210 Notebook 1 Fall Semester 2016/2017. 1 MATH2210 Notebook 1 3. 1.1 Solving Systems of Linear Equations... 3
 MATH0 Notebook Fall Semester 06/07 prepared by Professor Jenny Baglivo c Copyright 009 07 by Jenny A. Baglivo. All Rights Reserved. Contents MATH0 Notebook 3. Solving Systems of Linear Equations........................
MATH0 Notebook Fall Semester 06/07 prepared by Professor Jenny Baglivo c Copyright 009 07 by Jenny A. Baglivo. All Rights Reserved. Contents MATH0 Notebook 3. Solving Systems of Linear Equations........................
COMP175: Computer Graphics. Lecture 1 Introduction and Display Technologies
 COMP175: Computer Graphics Lecture 1 Introduction and Display Technologies Course mechanics Number: COMP 175-01, Fall 2009 Meetings: TR 1:30-2:45pm Instructor: Sara Su ([email protected]) TA: Matt Menke
COMP175: Computer Graphics Lecture 1 Introduction and Display Technologies Course mechanics Number: COMP 175-01, Fall 2009 Meetings: TR 1:30-2:45pm Instructor: Sara Su ([email protected]) TA: Matt Menke
Slope and Rate of Change
 Chapter 1 Slope and Rate of Change Chapter Summary and Goal This chapter will start with a discussion of slopes and the tangent line. This will rapidly lead to heuristic developments of limits and the
Chapter 1 Slope and Rate of Change Chapter Summary and Goal This chapter will start with a discussion of slopes and the tangent line. This will rapidly lead to heuristic developments of limits and the
Mechanics 1: Conservation of Energy and Momentum
 Mechanics : Conservation of Energy and Momentum If a certain quantity associated with a system does not change in time. We say that it is conserved, and the system possesses a conservation law. Conservation
Mechanics : Conservation of Energy and Momentum If a certain quantity associated with a system does not change in time. We say that it is conserved, and the system possesses a conservation law. Conservation
Geometry Notes PERIMETER AND AREA
 Perimeter and Area Page 1 of 57 PERIMETER AND AREA Objectives: After completing this section, you should be able to do the following: Calculate the area of given geometric figures. Calculate the perimeter
Perimeter and Area Page 1 of 57 PERIMETER AND AREA Objectives: After completing this section, you should be able to do the following: Calculate the area of given geometric figures. Calculate the perimeter