Numerical Solution of Differential Equations
|
|
|
- Phyllis Russell
- 9 years ago
- Views:
Transcription
1 Numerical Solution of Differential Equations 3 rd year JMC group project Summer Term 2004 Supervisor: Prof. Jeff Cash Saeed Amen Paul Bilokon Adam Brinley Codd Minal Fofaria Tejas Shah

2 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method

3 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method

4 Introduction to Differential Equations Equations involving a function y of x, and its derivatives Model real world systems General Equation:

5 Introduction to Differential Equations Simple example Solution obtained by integrating both sides Initial values can determine c

6 Introduction to Differential Equations Special case when equations do not involve x E.g. Initial values y(0) = 1 and y'(0) = 0, solution is
 = 1 and y'(0)")
7 Introduction to Differential Equations Kepler s Equations of Planetary Motion Difficult to solve analytically we use numerical methods instead

8 Introduction to Differential Equations Forward Euler and Backward Euler Trapezium Rule General method Use initial value of y at x=0 Calculate next value (x=h for small h) using gradient Call this y 1 and repeat Need formula for y n+1 in terms of y n

9 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method

10 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method

11 Euler s Methods Simplest way of solving ODEs numerically Does not always produce reasonable solutions Forward Euler (explicit) and Backward Euler (implicit)
 and Backward")
12 Forward Euler y True solution y(x + h) = y(x) + h y (x) Explicit y 2 Slope f(x 0, y 0 ) (x 2, y 2 ) Slope f(x 1, y 1 ) Approximated solution E loc = ½h 2 y (2) (ξ) h 2 First order Asymmetric y 1 (x 1, y 1 ) y 0 (x 0, y 0 ) h h x 0 x 1 x 2 x
 y 0 (x 0, y 0 ) h h x 0 x")
13 Backward Euler y 2 y (x 2, y 2 ) y(x + h) = y(x) + h y (x + h) True solution Implicit E loc = - ½h 2 y (2) (ξ) h 2 y 1 Slope f(x 1, y 1 ) (x 1, y 1 ) Slope f(x 2, y 2 ) Approximated solution First order Asymmetric y 0 (x 0, y 0 ) h h x 0 x 1 x 2 x
")
14 Trapezium Rule y(x + h) = y(x) + ½ h [y (x) + y (x + h)] Average of FE and BE Implicit E loc = - (h 3 /12) f (2) (ξ) h 3 Second order Symmetric
 (ξ) h 3 Second order")
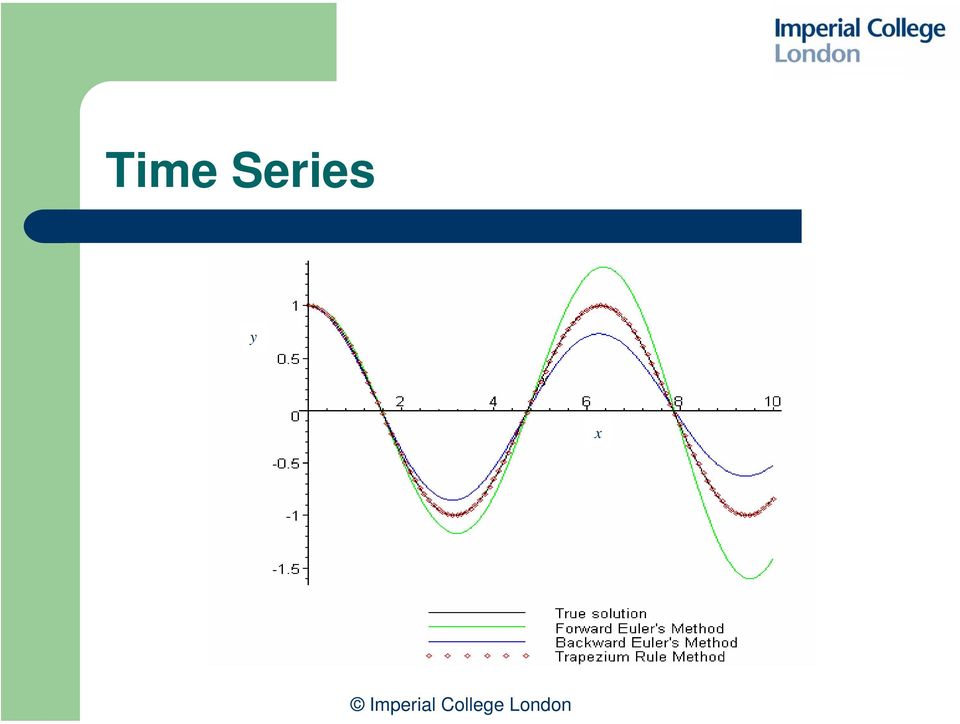
15 Example Problem: Circle Consider y = -y, with initial conditions y(0) = 1 y (0) = 0 The analytical solution is y = cos x, that can be used for comparison with numerical solutions

16 Plots for the True Solution Time series plot (xy) Phase plane plot (zy)
 Phase plane")
17 Time Series y x
18 Phase Plane Plots: FE & BE Forward Euler Backward Euler

19 Phase Plane Plots: TR FE & BE fail: non-periodic TR: OK, periodic sol n W h y?

20 Symmetricity TR is symmetric, whereas FE & BE are not Still TR! y(x + h) = y(x) + ½ h [y (x) + y (x + h)] h -h y(x - h) = y(x) - ½ h [y (x) + y (x - h)] X := x - h y(x + h) = y(x) + ½ h [y (X) + y (X + h)]
![y(x + h) = y(x) + ½ h [y (x) + y (x + h)] h -h y(x](/docs-images/49/17685278/images/page_20.jpg "- h) = y(x) - ½ h [y (x) + y (x - h)] X := x - h")
21 Symmetricity TR is symmetric, whereas FE & BE are not Still FE? y(x + h) = y(x) + h y (x) h -h y(x - h) = y(x) - h y (x) X := x - h y(x + h) = y(x) + h y (X + h)
22 Time Step h = 10-1 h = 10-2
23 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method
24 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method
25 After Euler and TR Can create higher order methods, which have far smaller global errors Methods are more complex and require more computation on each step But for same step size more accurate Introduce concept of half step
26 Two Fourth Order Methods y n+1 y n = y n + h/2(y n ) + (h 2 /12)(4y n+½ + 2y n ) y n+1 y n = h/6(y n+1 + 4y n+½ + y n ) (*) Then to calculate the half-step we use either A or B A) y n+ ½ = ½(y n+1 + y n ) h 2 /48(y n+1 + 4y n+½ + y n ) B) y n+ ½ = y n + ½y n h 2 /192(-2y n y n+½ + 14y n ) Which one is more accurate? (next slide) Solve iteratively and then apply solution to find derivative (*)
27 Creating Method A Start with y n+1 y n = h/6[y n+1 + 4y n+½ + y n ] (1) diff. y n+1 y n = h/6[y n+1 + 4y n+½ + y n ] (2) y n+½ = ½(y n+1 + y n ) h/8(y n+1 y n ) (3) diff. y n+½ = ½(y n+1 + y n ) h/8(y n+1 y n ) (4) subs (4) into (1) (to eliminate y n+½ ) and eliminate y n+1 using (2), then use (2) in (3) to get half-step
28 Comparing Fourth Order Methods Comparing errors when solving circle problem Both A and B produce a much smaller order of error than Euler s
29 Finding Earth s Orbit Around Sun Kepler s Equation Can use it to find the orbit of planets Use to find orbit of earth around the sun Work in two dimensions z and y z = -(GM z) / (y 2 + z 2 ) 3/2 y = -(GM y) / (y 2 + z 2 ) 3/2 Constants and initial conditions in report
30 Results Plot Solution uses small step size h = 0.01 Becomes difficult to tell difference between methods visually Using h = 0.1 difference is more marked
31 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method
32 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method
33 Stiff Equations Certain systems of ODEs are classified as stiff A system of ODEs is stiff if there are two or more very different scales of the independent variable on which the dependent variables are changing Some of the methods used to find numerical solutions fail to obtain the required solution
34 Example Consider the equation: 2 d y dy + ( λ + 1) + λy = 2 dx dx With initial conditions: y( 0) = y' (0) 1 = 1 There are two solutions to this problem 0
35 Example continued Analytical solution: y=e -x Unwanted solution: y=e -λx We will now show how forward Euler is not stable when solving this problem under certain circumstances
36 Example continued Let λ = 10 3 and let (the step size) h = 0.1
37 Increasing the range of the x-axis
38 When h = 0.001
39 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method
40 Agenda Adam: Differential equations and numerical methods Paul: Basic methods (FE, BE, TR). Problem: circle Saeed: Advanced methods (4 th order). Problem: Kepler s equation Minal: Stiff equations Tejas: Derivation of 6 th order method
41 A Sixth Order Numerical Method Has an error term with smallest h degree as h 7 Idea is to find values for α, A, B, C, D, E, F, C, D, E, F such that:
42 Derivation Compare Taylor s Expansion of LHS and RHS So for: First expand the LHS
43 Derivation Now expand individual terms on RHS of our expression: This gives:
44 Derivation Equate both sides and solve for constants: Similarly we can find C, D, E, F and C, D, E, F
45 Applying 6 th Order Method How to obtain results using derived method. Produce a set of simultaneous equations and solve. Find y n+1 from old values and those just obtained. Set x, y n, y n etc. to new values. Repeat above procedure with updated variables.
46 Circle Problem Example Circle is produced for phase plane plot
47 Kepler s Equations Solution obtained from z-y plot reinforces fourth order method results.
48 The End But perhaps you want more? Read our report Visit our website:
Visualizing Differential Equations Slope Fields. by Lin McMullin
 Visualizing Differential Equations Slope Fields by Lin McMullin The topic of slope fields is new to the AP Calculus AB Course Description for the 2004 exam. Where do slope fields come from? How should
Visualizing Differential Equations Slope Fields by Lin McMullin The topic of slope fields is new to the AP Calculus AB Course Description for the 2004 exam. Where do slope fields come from? How should
Math 2280 - Assignment 6
 Math 2280 - Assignment 6 Dylan Zwick Spring 2014 Section 3.8-1, 3, 5, 8, 13 Section 4.1-1, 2, 13, 15, 22 Section 4.2-1, 10, 19, 28 1 Section 3.8 - Endpoint Problems and Eigenvalues 3.8.1 For the eigenvalue
Math 2280 - Assignment 6 Dylan Zwick Spring 2014 Section 3.8-1, 3, 5, 8, 13 Section 4.1-1, 2, 13, 15, 22 Section 4.2-1, 10, 19, 28 1 Section 3.8 - Endpoint Problems and Eigenvalues 3.8.1 For the eigenvalue
Solutions to Homework 5
 Solutions to Homework 5 1. Let z = f(x, y) be a twice continously differentiable function of x and y. Let x = r cos θ and y = r sin θ be the equations which transform polar coordinates into rectangular
Solutions to Homework 5 1. Let z = f(x, y) be a twice continously differentiable function of x and y. Let x = r cos θ and y = r sin θ be the equations which transform polar coordinates into rectangular
Introduction to Algebraic Geometry. Bézout s Theorem and Inflection Points
 Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
Numerical Solution of Differential Equations
 Numerical Solution of Differential Equations Dr. Alvaro Islas Applications of Calculus I Spring 2008 We live in a world in constant change We live in a world in constant change We live in a world in constant
Numerical Solution of Differential Equations Dr. Alvaro Islas Applications of Calculus I Spring 2008 We live in a world in constant change We live in a world in constant change We live in a world in constant
AP CALCULUS BC 2008 SCORING GUIDELINES
 AP CALCULUS BC 008 SCORING GUIDELINES Question 6 dy y Consider the logistic differential equation = ( 6 y). Let y = f() t be the particular solution to the 8 differential equation with f ( 0) = 8. (a)
AP CALCULUS BC 008 SCORING GUIDELINES Question 6 dy y Consider the logistic differential equation = ( 6 y). Let y = f() t be the particular solution to the 8 differential equation with f ( 0) = 8. (a)
Section 12.6: Directional Derivatives and the Gradient Vector
 Section 26: Directional Derivatives and the Gradient Vector Recall that if f is a differentiable function of x and y and z = f(x, y), then the partial derivatives f x (x, y) and f y (x, y) give the rate
Section 26: Directional Derivatives and the Gradient Vector Recall that if f is a differentiable function of x and y and z = f(x, y), then the partial derivatives f x (x, y) and f y (x, y) give the rate
SIXTY STUDY QUESTIONS TO THE COURSE NUMERISK BEHANDLING AV DIFFERENTIALEKVATIONER I
 Lennart Edsberg, Nada, KTH Autumn 2008 SIXTY STUDY QUESTIONS TO THE COURSE NUMERISK BEHANDLING AV DIFFERENTIALEKVATIONER I Parameter values and functions occurring in the questions belowwill be exchanged
Lennart Edsberg, Nada, KTH Autumn 2008 SIXTY STUDY QUESTIONS TO THE COURSE NUMERISK BEHANDLING AV DIFFERENTIALEKVATIONER I Parameter values and functions occurring in the questions belowwill be exchanged
GRAPHING IN POLAR COORDINATES SYMMETRY
 GRAPHING IN POLAR COORDINATES SYMMETRY Recall from Algebra and Calculus I that the concept of symmetry was discussed using Cartesian equations. Also remember that there are three types of symmetry - y-axis,
GRAPHING IN POLAR COORDINATES SYMMETRY Recall from Algebra and Calculus I that the concept of symmetry was discussed using Cartesian equations. Also remember that there are three types of symmetry - y-axis,
Numerical Methods for Differential Equations
 Numerical Methods for Differential Equations Course objectives and preliminaries Gustaf Söderlind and Carmen Arévalo Numerical Analysis, Lund University Textbooks: A First Course in the Numerical Analysis
Numerical Methods for Differential Equations Course objectives and preliminaries Gustaf Söderlind and Carmen Arévalo Numerical Analysis, Lund University Textbooks: A First Course in the Numerical Analysis
The Fourth International DERIVE-TI92/89 Conference Liverpool, U.K., 12-15 July 2000. Derive 5: The Easiest... Just Got Better!
 The Fourth International DERIVE-TI9/89 Conference Liverpool, U.K., -5 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de technologie supérieure 00, rue Notre-Dame Ouest Montréal
The Fourth International DERIVE-TI9/89 Conference Liverpool, U.K., -5 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de technologie supérieure 00, rue Notre-Dame Ouest Montréal
Math 432 HW 2.5 Solutions
 Math 432 HW 2.5 Solutions Assigned: 1-10, 12, 13, and 14. Selected for Grading: 1 (for five points), 6 (also for five), 9, 12 Solutions: 1. (2y 3 + 2y 2 ) dx + (3y 2 x + 2xy) dy = 0. M/ y = 6y 2 + 4y N/
Math 432 HW 2.5 Solutions Assigned: 1-10, 12, 13, and 14. Selected for Grading: 1 (for five points), 6 (also for five), 9, 12 Solutions: 1. (2y 3 + 2y 2 ) dx + (3y 2 x + 2xy) dy = 0. M/ y = 6y 2 + 4y N/
On using numerical algebraic geometry to find Lyapunov functions of polynomial dynamical systems
 Dynamics at the Horsetooth Volume 2, 2010. On using numerical algebraic geometry to find Lyapunov functions of polynomial dynamical systems Eric Hanson Department of Mathematics Colorado State University
Dynamics at the Horsetooth Volume 2, 2010. On using numerical algebraic geometry to find Lyapunov functions of polynomial dynamical systems Eric Hanson Department of Mathematics Colorado State University
Solutions for Review Problems
 olutions for Review Problems 1. Let be the triangle with vertices A (,, ), B (4,, 1) and C (,, 1). (a) Find the cosine of the angle BAC at vertex A. (b) Find the area of the triangle ABC. (c) Find a vector
olutions for Review Problems 1. Let be the triangle with vertices A (,, ), B (4,, 1) and C (,, 1). (a) Find the cosine of the angle BAC at vertex A. (b) Find the area of the triangle ABC. (c) Find a vector
THE COLLEGES OF OXFORD UNIVERSITY MATHEMATICS, JOINT SCHOOLS AND COMPUTER SCIENCE. Sample Solutions for Specimen Test 2
 THE COLLEGES OF OXFORD UNIVERSITY MATHEMATICS, JOINT SCHOOLS AND COMPUTER SCIENCE Sample Solutions for Specimen Test. A. The vector from P (, ) to Q (8, ) is PQ =(6, 6). If the point R lies on PQ such
THE COLLEGES OF OXFORD UNIVERSITY MATHEMATICS, JOINT SCHOOLS AND COMPUTER SCIENCE Sample Solutions for Specimen Test. A. The vector from P (, ) to Q (8, ) is PQ =(6, 6). If the point R lies on PQ such
This makes sense. t 2 1 + 1/t 2 dt = 1. t t 2 + 1dt = 2 du = 1 3 u3/2 u=5
 1. (Line integrals Using parametrization. Two types and the flux integral) Formulas: ds = x (t) dt, d x = x (t)dt and d x = T ds since T = x (t)/ x (t). Another one is Nds = T ds ẑ = (dx, dy) ẑ = (dy,
1. (Line integrals Using parametrization. Two types and the flux integral) Formulas: ds = x (t) dt, d x = x (t)dt and d x = T ds since T = x (t)/ x (t). Another one is Nds = T ds ẑ = (dx, dy) ẑ = (dy,
Practice Final Math 122 Spring 12 Instructor: Jeff Lang
 Practice Final Math Spring Instructor: Jeff Lang. Find the limit of the sequence a n = ln (n 5) ln (3n + 8). A) ln ( ) 3 B) ln C) ln ( ) 3 D) does not exist. Find the limit of the sequence a n = (ln n)6
Practice Final Math Spring Instructor: Jeff Lang. Find the limit of the sequence a n = ln (n 5) ln (3n + 8). A) ln ( ) 3 B) ln C) ln ( ) 3 D) does not exist. Find the limit of the sequence a n = (ln n)6
Finite Elements for 2 D Problems
 Finite Elements for 2 D Problems General Formula for the Stiffness Matrix Displacements (u, v) in a plane element are interpolated from nodal displacements (ui, vi) using shape functions Ni as follows,
Finite Elements for 2 D Problems General Formula for the Stiffness Matrix Displacements (u, v) in a plane element are interpolated from nodal displacements (ui, vi) using shape functions Ni as follows,
Analysis of Stresses and Strains
 Chapter 7 Analysis of Stresses and Strains 7.1 Introduction axial load = P / A torsional load in circular shaft = T / I p bending moment and shear force in beam = M y / I = V Q / I b in this chapter, we
Chapter 7 Analysis of Stresses and Strains 7.1 Introduction axial load = P / A torsional load in circular shaft = T / I p bending moment and shear force in beam = M y / I = V Q / I b in this chapter, we
Envelope Theorem. Kevin Wainwright. Mar 22, 2004
 Envelope Theorem Kevin Wainwright Mar 22, 2004 1 Maximum Value Functions A maximum (or minimum) value function is an objective function where the choice variables have been assigned their optimal values.
Envelope Theorem Kevin Wainwright Mar 22, 2004 1 Maximum Value Functions A maximum (or minimum) value function is an objective function where the choice variables have been assigned their optimal values.
x 2 + y 2 = 1 y 1 = x 2 + 2x y = x 2 + 2x + 1
 Implicit Functions Defining Implicit Functions Up until now in this course, we have only talked about functions, which assign to every real number x in their domain exactly one real number f(x). The graphs
Implicit Functions Defining Implicit Functions Up until now in this course, we have only talked about functions, which assign to every real number x in their domain exactly one real number f(x). The graphs
Exam 1 Sample Question SOLUTIONS. y = 2x
 Exam Sample Question SOLUTIONS. Eliminate the parameter to find a Cartesian equation for the curve: x e t, y e t. SOLUTION: You might look at the coordinates and notice that If you don t see it, we can
Exam Sample Question SOLUTIONS. Eliminate the parameter to find a Cartesian equation for the curve: x e t, y e t. SOLUTION: You might look at the coordinates and notice that If you don t see it, we can
Scan Conversion of Filled Primitives Rectangles Polygons. Many concepts are easy in continuous space - Difficult in discrete space
 [email protected] CSE 480/580 Lecture 7 Slide 1 2D Primitives I Point-plotting (Scan Conversion) Lines Circles Ellipses Scan Conversion of Filled Primitives Rectangles Polygons Clipping In graphics must
[email protected] CSE 480/580 Lecture 7 Slide 1 2D Primitives I Point-plotting (Scan Conversion) Lines Circles Ellipses Scan Conversion of Filled Primitives Rectangles Polygons Clipping In graphics must
2.2 Derivative as a Function
 2.2 Derivative as a Function Recall that we defined the derivative as f (a) = lim h 0 f(a + h) f(a) h But since a is really just an arbitrary number that represents an x-value, why don t we just use x
2.2 Derivative as a Function Recall that we defined the derivative as f (a) = lim h 0 f(a + h) f(a) h But since a is really just an arbitrary number that represents an x-value, why don t we just use x
To give it a definition, an implicit function of x and y is simply any relationship that takes the form:
 2 Implicit function theorems and applications 21 Implicit functions The implicit function theorem is one of the most useful single tools you ll meet this year After a while, it will be second nature to
2 Implicit function theorems and applications 21 Implicit functions The implicit function theorem is one of the most useful single tools you ll meet this year After a while, it will be second nature to
Homework 2 Solutions
 Homework Solutions Igor Yanovsky Math 5B TA Section 5.3, Problem b: Use Taylor s method of order two to approximate the solution for the following initial-value problem: y = + t y, t 3, y =, with h = 0.5.
Homework Solutions Igor Yanovsky Math 5B TA Section 5.3, Problem b: Use Taylor s method of order two to approximate the solution for the following initial-value problem: y = + t y, t 3, y =, with h = 0.5.
Separable First Order Differential Equations
 Separable First Order Differential Equations Form of Separable Equations which take the form = gx hy or These are differential equations = gxĥy, where gx is a continuous function of x and hy is a continuously
Separable First Order Differential Equations Form of Separable Equations which take the form = gx hy or These are differential equations = gxĥy, where gx is a continuous function of x and hy is a continuously
ECG590I Asset Pricing. Lecture 2: Present Value 1
 ECG59I Asset Pricing. Lecture 2: Present Value 1 2 Present Value If you have to decide between receiving 1$ now or 1$ one year from now, then you would rather have your money now. If you have to decide
ECG59I Asset Pricing. Lecture 2: Present Value 1 2 Present Value If you have to decide between receiving 1$ now or 1$ one year from now, then you would rather have your money now. If you have to decide
1.5 Equations of Lines and Planes in 3-D
 40 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.16: Line through P 0 parallel to v 1.5 Equations of Lines and Planes in 3-D Recall that given a point P = (a, b, c), one can draw a vector from
40 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.16: Line through P 0 parallel to v 1.5 Equations of Lines and Planes in 3-D Recall that given a point P = (a, b, c), one can draw a vector from
Name: ID: Discussion Section:
 Math 28 Midterm 3 Spring 2009 Name: ID: Discussion Section: This exam consists of 6 questions: 4 multiple choice questions worth 5 points each 2 hand-graded questions worth a total of 30 points. INSTRUCTIONS:
Math 28 Midterm 3 Spring 2009 Name: ID: Discussion Section: This exam consists of 6 questions: 4 multiple choice questions worth 5 points each 2 hand-graded questions worth a total of 30 points. INSTRUCTIONS:
Machine Learning and Data Mining. Regression Problem. (adapted from) Prof. Alexander Ihler
 Prof. Alexander Ihler") Machine Learning and Data Mining Regression Problem (adapted from) Prof. Alexander Ihler Overview Regression Problem Definition and define parameters ϴ. Prediction using ϴ as parameters Measure the error
Machine Learning and Data Mining Regression Problem (adapted from) Prof. Alexander Ihler Overview Regression Problem Definition and define parameters ϴ. Prediction using ϴ as parameters Measure the error
1 Determinants and the Solvability of Linear Systems
 1 Determinants and the Solvability of Linear Systems In the last section we learned how to use Gaussian elimination to solve linear systems of n equations in n unknowns The section completely side-stepped
1 Determinants and the Solvability of Linear Systems In the last section we learned how to use Gaussian elimination to solve linear systems of n equations in n unknowns The section completely side-stepped
www.mathsbox.org.uk ab = c a If the coefficients a,b and c are real then either α and β are real or α and β are complex conjugates
 Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
Solutions to Practice Problems for Test 4
 olutions to Practice Problems for Test 4 1. Let be the line segmentfrom the point (, 1, 1) to the point (,, 3). Evaluate the line integral y ds. Answer: First, we parametrize the line segment from (, 1,
olutions to Practice Problems for Test 4 1. Let be the line segmentfrom the point (, 1, 1) to the point (,, 3). Evaluate the line integral y ds. Answer: First, we parametrize the line segment from (, 1,
Orbits. Chapter 17. Dynamics of many-body systems.
 Chapter 7 Orbits Dynamics of many-body systems. Many mathematical models involve the dynamics of objects under the influence of both their mutual interaction and the surrounding environment. The objects
Chapter 7 Orbits Dynamics of many-body systems. Many mathematical models involve the dynamics of objects under the influence of both their mutual interaction and the surrounding environment. The objects
5.7 Maximum and Minimum Values
 5.7 Maximum and Minimum Values Objectives Icandefinecriticalpoints. I know the di erence between local and absolute minimums/maximums. I can find local maximum(s), minimum(s), and saddle points for a given
5.7 Maximum and Minimum Values Objectives Icandefinecriticalpoints. I know the di erence between local and absolute minimums/maximums. I can find local maximum(s), minimum(s), and saddle points for a given
MAT 274 HW 2 Solutions c Bin Cheng. Due 11:59pm, W 9/07, 2011. 80 Points
 MAT 274 HW 2 Solutions Due 11:59pm, W 9/07, 2011. 80 oints 1. (30 ) The last two problems of Webwork Set 03 Modeling. Show all the steps and, also, indicate the equilibrium solutions for each problem.
MAT 274 HW 2 Solutions Due 11:59pm, W 9/07, 2011. 80 oints 1. (30 ) The last two problems of Webwork Set 03 Modeling. Show all the steps and, also, indicate the equilibrium solutions for each problem.
( 1)2 + 2 2 + 2 2 = 9 = 3 We would like to make the length 6. The only vectors in the same direction as v are those
2 + 2 2 + 2 2 = 9 = 3 We would like to make the length 6. The only vectors in the same direction as v are those") 1.(6pts) Which of the following vectors has the same direction as v 1,, but has length 6? (a), 4, 4 (b),, (c) 4,, 4 (d), 4, 4 (e) 0, 6, 0 The length of v is given by ( 1) + + 9 3 We would like to make
1.(6pts) Which of the following vectors has the same direction as v 1,, but has length 6? (a), 4, 4 (b),, (c) 4,, 4 (d), 4, 4 (e) 0, 6, 0 The length of v is given by ( 1) + + 9 3 We would like to make
CS 294-73 Software Engineering for Scientific Computing. http://www.cs.berkeley.edu/~colella/cs294fall2013. Lecture 16: Particle Methods; Homework #4
 CS 294-73 Software Engineering for Scientific Computing http://www.cs.berkeley.edu/~colella/cs294fall2013 Lecture 16: Particle Methods; Homework #4 Discretizing Time-Dependent Problems From here on in,
CS 294-73 Software Engineering for Scientific Computing http://www.cs.berkeley.edu/~colella/cs294fall2013 Lecture 16: Particle Methods; Homework #4 Discretizing Time-Dependent Problems From here on in,
The Two-Body Problem
 The Two-Body Problem Abstract In my short essay on Kepler s laws of planetary motion and Newton s law of universal gravitation, the trajectory of one massive object near another was shown to be a conic
The Two-Body Problem Abstract In my short essay on Kepler s laws of planetary motion and Newton s law of universal gravitation, the trajectory of one massive object near another was shown to be a conic
SSLV105 - Stiffening centrifuges of a beam in rotation
 Titre : SSLV105 - Raidissement centrifuge d'une poutre en [...] Date : 19/09/2011 Page : 1/6 SSLV105 - Stiffening centrifuges of a beam in rotation Summarized: Test of Structural mechanics in linear static
Titre : SSLV105 - Raidissement centrifuge d'une poutre en [...] Date : 19/09/2011 Page : 1/6 SSLV105 - Stiffening centrifuges of a beam in rotation Summarized: Test of Structural mechanics in linear static
RAJALAKSHMI ENGINEERING COLLEGE MA 2161 UNIT I - ORDINARY DIFFERENTIAL EQUATIONS PART A
 RAJALAKSHMI ENGINEERING COLLEGE MA 26 UNIT I - ORDINARY DIFFERENTIAL EQUATIONS. Solve (D 2 + D 2)y = 0. 2. Solve (D 2 + 6D + 9)y = 0. PART A 3. Solve (D 4 + 4)x = 0 where D = d dt 4. Find Particular Integral:
RAJALAKSHMI ENGINEERING COLLEGE MA 26 UNIT I - ORDINARY DIFFERENTIAL EQUATIONS. Solve (D 2 + D 2)y = 0. 2. Solve (D 2 + 6D + 9)y = 0. PART A 3. Solve (D 4 + 4)x = 0 where D = d dt 4. Find Particular Integral:
= δx x + δy y. df ds = dx. ds y + xdy ds. Now multiply by ds to get the form of the equation in terms of differentials: df = y dx + x dy.
 ERROR PROPAGATION For sums, differences, products, and quotients, propagation of errors is done as follows. (These formulas can easily be calculated using calculus, using the differential as the associated
ERROR PROPAGATION For sums, differences, products, and quotients, propagation of errors is done as follows. (These formulas can easily be calculated using calculus, using the differential as the associated
Solving ODEs in Matlab. BP205 M.Tremont 1.30.2009
 Solving ODEs in Matlab BP205 M.Tremont 1.30.2009 - Outline - I. Defining an ODE function in an M-file II. III. IV. Solving first-order ODEs Solving systems of first-order ODEs Solving higher order ODEs
Solving ODEs in Matlab BP205 M.Tremont 1.30.2009 - Outline - I. Defining an ODE function in an M-file II. III. IV. Solving first-order ODEs Solving systems of first-order ODEs Solving higher order ODEs
Exercise: Estimating the Mass of Jupiter Difficulty: Medium
 Exercise: Estimating the Mass of Jupiter Difficulty: Medium OBJECTIVE The July / August observing notes for 010 state that Jupiter rises at dusk. The great planet is now starting its grand showing for
Exercise: Estimating the Mass of Jupiter Difficulty: Medium OBJECTIVE The July / August observing notes for 010 state that Jupiter rises at dusk. The great planet is now starting its grand showing for
Orbital Mechanics. Angular Momentum
 Orbital Mechanics The objects that orbit earth have only a few forces acting on them, the largest being the gravitational pull from the earth. The trajectories that satellites or rockets follow are largely
Orbital Mechanics The objects that orbit earth have only a few forces acting on them, the largest being the gravitational pull from the earth. The trajectories that satellites or rockets follow are largely
The Math Circle, Spring 2004
 The Math Circle, Spring 2004 (Talks by Gordon Ritter) What is Non-Euclidean Geometry? Most geometries on the plane R 2 are non-euclidean. Let s denote arc length. Then Euclidean geometry arises from the
The Math Circle, Spring 2004 (Talks by Gordon Ritter) What is Non-Euclidean Geometry? Most geometries on the plane R 2 are non-euclidean. Let s denote arc length. Then Euclidean geometry arises from the
Chapter 9. Systems of Linear Equations
 Chapter 9. Systems of Linear Equations 9.1. Solve Systems of Linear Equations by Graphing KYOTE Standards: CR 21; CA 13 In this section we discuss how to solve systems of two linear equations in two variables
Chapter 9. Systems of Linear Equations 9.1. Solve Systems of Linear Equations by Graphing KYOTE Standards: CR 21; CA 13 In this section we discuss how to solve systems of two linear equations in two variables
FINAL EXAM SOLUTIONS Math 21a, Spring 03
 INAL EXAM SOLUIONS Math 21a, Spring 3 Name: Start by printing your name in the above box and check your section in the box to the left. MW1 Ken Chung MW1 Weiyang Qiu MW11 Oliver Knill h1 Mark Lucianovic
INAL EXAM SOLUIONS Math 21a, Spring 3 Name: Start by printing your name in the above box and check your section in the box to the left. MW1 Ken Chung MW1 Weiyang Qiu MW11 Oliver Knill h1 Mark Lucianovic
General Theory of Differential Equations Sections 2.8, 3.1-3.2, 4.1
 A B I L E N E C H R I S T I A N U N I V E R S I T Y Department of Mathematics General Theory of Differential Equations Sections 2.8, 3.1-3.2, 4.1 Dr. John Ehrke Department of Mathematics Fall 2012 Questions
A B I L E N E C H R I S T I A N U N I V E R S I T Y Department of Mathematics General Theory of Differential Equations Sections 2.8, 3.1-3.2, 4.1 Dr. John Ehrke Department of Mathematics Fall 2012 Questions
Numerical Analysis An Introduction
 Walter Gautschi Numerical Analysis An Introduction 1997 Birkhauser Boston Basel Berlin CONTENTS PREFACE xi CHAPTER 0. PROLOGUE 1 0.1. Overview 1 0.2. Numerical analysis software 3 0.3. Textbooks and monographs
Walter Gautschi Numerical Analysis An Introduction 1997 Birkhauser Boston Basel Berlin CONTENTS PREFACE xi CHAPTER 0. PROLOGUE 1 0.1. Overview 1 0.2. Numerical analysis software 3 0.3. Textbooks and monographs
Some Comments on the Derivative of a Vector with applications to angular momentum and curvature. E. L. Lady (October 18, 2000)
") Some Comments on the Derivative of a Vector with applications to angular momentum and curvature E. L. Lady (October 18, 2000) Finding the formula in polar coordinates for the angular momentum of a moving
Some Comments on the Derivative of a Vector with applications to angular momentum and curvature E. L. Lady (October 18, 2000) Finding the formula in polar coordinates for the angular momentum of a moving
Map Patterns and Finding the Strike and Dip from a Mapped Outcrop of a Planar Surface
 Map Patterns and Finding the Strike and Dip from a Mapped Outcrop of a Planar Surface Topographic maps represent the complex curves of earth s surface with contour lines that represent the intersection
Map Patterns and Finding the Strike and Dip from a Mapped Outcrop of a Planar Surface Topographic maps represent the complex curves of earth s surface with contour lines that represent the intersection
Procedure for Graphing Polynomial Functions
 Procedure for Graphing Polynomial Functions P(x) = a n x n + a n-1 x n-1 + + a 1 x + a 0 To graph P(x): As an example, we will examine the following polynomial function: P(x) = 2x 3 3x 2 23x + 12 1. Determine
Procedure for Graphing Polynomial Functions P(x) = a n x n + a n-1 x n-1 + + a 1 x + a 0 To graph P(x): As an example, we will examine the following polynomial function: P(x) = 2x 3 3x 2 23x + 12 1. Determine
Earth, Moon, and Sun Study Guide. (Test Date: )
") Earth, Moon, and Sun Study Guide Name: (Test Date: ) Essential Question #1: How are the Earth, Moon, and Sun alike and how are they different? 1. List the Earth, Moon, and Sun, in order from LARGEST to
Earth, Moon, and Sun Study Guide Name: (Test Date: ) Essential Question #1: How are the Earth, Moon, and Sun alike and how are they different? 1. List the Earth, Moon, and Sun, in order from LARGEST to
Math 1302, Week 3 Polar coordinates and orbital motion
 Math 130, Week 3 Polar coordinates and orbital motion 1 Motion under a central force We start by considering the motion of the earth E around the (fixed) sun (figure 1). The key point here is that the
Math 130, Week 3 Polar coordinates and orbital motion 1 Motion under a central force We start by considering the motion of the earth E around the (fixed) sun (figure 1). The key point here is that the
5 Numerical Differentiation
 D. Levy 5 Numerical Differentiation 5. Basic Concepts This chapter deals with numerical approximations of derivatives. The first questions that comes up to mind is: why do we need to approximate derivatives
D. Levy 5 Numerical Differentiation 5. Basic Concepts This chapter deals with numerical approximations of derivatives. The first questions that comes up to mind is: why do we need to approximate derivatives
= = GM. v 1 = Ωa 1 sin i.
 1 Binary Stars Consider a binary composed of two stars of masses M 1 and We define M = M 1 + and µ = M 1 /M If a 1 and a 2 are the mean distances of the stars from the center of mass, then M 1 a 1 = a
1 Binary Stars Consider a binary composed of two stars of masses M 1 and We define M = M 1 + and µ = M 1 /M If a 1 and a 2 are the mean distances of the stars from the center of mass, then M 1 a 1 = a
Derive 5: The Easiest... Just Got Better!
 Liverpool John Moores University, 1-15 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de Technologie Supérieure, Canada Email; [email protected] 1. Introduction Engineering
Liverpool John Moores University, 1-15 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de Technologie Supérieure, Canada Email; [email protected] 1. Introduction Engineering
Numerical Methods for Differential Equations
 Numerical Methods for Differential Equations Chapter 1: Initial value problems in ODEs Gustaf Söderlind and Carmen Arévalo Numerical Analysis, Lund University Textbooks: A First Course in the Numerical
Numerical Methods for Differential Equations Chapter 1: Initial value problems in ODEs Gustaf Söderlind and Carmen Arévalo Numerical Analysis, Lund University Textbooks: A First Course in the Numerical
Solving Differential Equations by Symmetry Groups
 Solving Differential Equations by Symmetry Groups John Starrett 1 WHICH ODES ARE EASY TO SOLVE? Consider the first order ODEs dy dx = f(x), dy dx = g(y). It is easy to see that the solutions are found
Solving Differential Equations by Symmetry Groups John Starrett 1 WHICH ODES ARE EASY TO SOLVE? Consider the first order ODEs dy dx = f(x), dy dx = g(y). It is easy to see that the solutions are found
Progettazione Funzionale di Sistemi Meccanici e Meccatronici
 Camme - Progettazione di massima prof. Paolo Righettini [email protected] Università degli Studi di Bergamo Mechatronics And Mechanical Dynamics Labs November 3, 2013 Timing for more coordinated
Camme - Progettazione di massima prof. Paolo Righettini [email protected] Università degli Studi di Bergamo Mechatronics And Mechanical Dynamics Labs November 3, 2013 Timing for more coordinated
Math 241, Exam 1 Information.
 Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
A QUICK GUIDE TO THE FORMULAS OF MULTIVARIABLE CALCULUS
 A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
Review of Matlab for Differential Equations. Lia Vas
 Review of Matlab for Differential Equations Lia Vas 1. Basic arithmetic (Practice problems 1) 2. Solving equations with solve (Practice problems 2) 3. Representing functions 4. Graphics 5. Parametric Plots
Review of Matlab for Differential Equations Lia Vas 1. Basic arithmetic (Practice problems 1) 2. Solving equations with solve (Practice problems 2) 3. Representing functions 4. Graphics 5. Parametric Plots
Particular Solutions. y = Ae 4x and y = 3 at x = 0 3 = Ae 4 0 3 = A y = 3e 4x
 Particular Solutions If the differential equation is actually modeling something (like the cost of milk as a function of time) it is likely that you will know a specific value (like the fact that milk
Particular Solutions If the differential equation is actually modeling something (like the cost of milk as a function of time) it is likely that you will know a specific value (like the fact that milk
correct-choice plot f(x) and draw an approximate tangent line at x = a and use geometry to estimate its slope comment The choices were:
 and draw an approximate tangent line at x = a and use geometry to estimate its slope comment The choices were:") Topic 1 2.1 mode MultipleSelection text How can we approximate the slope of the tangent line to f(x) at a point x = a? This is a Multiple selection question, so you need to check all of the answers that
Topic 1 2.1 mode MultipleSelection text How can we approximate the slope of the tangent line to f(x) at a point x = a? This is a Multiple selection question, so you need to check all of the answers that
Solutions to Homework 10
 Solutions to Homework 1 Section 7., exercise # 1 (b,d): (b) Compute the value of R f dv, where f(x, y) = y/x and R = [1, 3] [, 4]. Solution: Since f is continuous over R, f is integrable over R. Let x
Solutions to Homework 1 Section 7., exercise # 1 (b,d): (b) Compute the value of R f dv, where f(x, y) = y/x and R = [1, 3] [, 4]. Solution: Since f is continuous over R, f is integrable over R. Let x
MATH 425, PRACTICE FINAL EXAM SOLUTIONS.
 MATH 45, PRACTICE FINAL EXAM SOLUTIONS. Exercise. a Is the operator L defined on smooth functions of x, y by L u := u xx + cosu linear? b Does the answer change if we replace the operator L by the operator
MATH 45, PRACTICE FINAL EXAM SOLUTIONS. Exercise. a Is the operator L defined on smooth functions of x, y by L u := u xx + cosu linear? b Does the answer change if we replace the operator L by the operator
LINEAR ALGEBRA W W L CHEN
 LINEAR ALGEBRA W W L CHEN c W W L Chen, 1982, 2008. This chapter originates from material used by author at Imperial College, University of London, between 1981 and 1990. It is available free to all individuals,
LINEAR ALGEBRA W W L CHEN c W W L Chen, 1982, 2008. This chapter originates from material used by author at Imperial College, University of London, between 1981 and 1990. It is available free to all individuals,
UC Irvine FOCUS! 5 E Lesson Plan
 UC Irvine FOCUS! 5 E Lesson Plan Title: Astronomical Units and The Solar System Grade Level and Course: 8th grade Physical Science Materials: Visual introduction for solar system (slides, video, posters,
UC Irvine FOCUS! 5 E Lesson Plan Title: Astronomical Units and The Solar System Grade Level and Course: 8th grade Physical Science Materials: Visual introduction for solar system (slides, video, posters,
Chapter 25.1: Models of our Solar System
 Chapter 25.1: Models of our Solar System Objectives: Compare & Contrast geocentric and heliocentric models of the solar sytem. Describe the orbits of planets explain how gravity and inertia keep the planets
Chapter 25.1: Models of our Solar System Objectives: Compare & Contrast geocentric and heliocentric models of the solar sytem. Describe the orbits of planets explain how gravity and inertia keep the planets
2.2. Instantaneous Velocity
 2.2. Instantaneous Velocity toc Assuming that your are not familiar with the technical aspects of this section, when you think about it, your knowledge of velocity is limited. In terms of your own mathematical
2.2. Instantaneous Velocity toc Assuming that your are not familiar with the technical aspects of this section, when you think about it, your knowledge of velocity is limited. In terms of your own mathematical
Night Sky III Planetary Motion Lunar Phases
 Night Sky III Planetary Motion Lunar Phases Astronomy 1 Elementary Astronomy LA Mission College Spring F2015 Quotes & Cartoon of the Day Everything has a natural explanation. The moon is not a god, but
Night Sky III Planetary Motion Lunar Phases Astronomy 1 Elementary Astronomy LA Mission College Spring F2015 Quotes & Cartoon of the Day Everything has a natural explanation. The moon is not a god, but
Calculus. Contents. Paul Sutcliffe. Office: CM212a.
 Calculus Paul Sutcliffe Office: CM212a. www.maths.dur.ac.uk/~dma0pms/calc/calc.html Books One and several variables calculus, Salas, Hille & Etgen. Calculus, Spivak. Mathematical methods in the physical
Calculus Paul Sutcliffe Office: CM212a. www.maths.dur.ac.uk/~dma0pms/calc/calc.html Books One and several variables calculus, Salas, Hille & Etgen. Calculus, Spivak. Mathematical methods in the physical
SECOND DERIVATIVE TEST FOR CONSTRAINED EXTREMA
 SECOND DERIVATIVE TEST FOR CONSTRAINED EXTREMA This handout presents the second derivative test for a local extrema of a Lagrange multiplier problem. The Section 1 presents a geometric motivation for the
SECOND DERIVATIVE TEST FOR CONSTRAINED EXTREMA This handout presents the second derivative test for a local extrema of a Lagrange multiplier problem. The Section 1 presents a geometric motivation for the
Physics Midterm Review Packet January 2010
 Physics Midterm Review Packet January 2010 This Packet is a Study Guide, not a replacement for studying from your notes, tests, quizzes, and textbook. Midterm Date: Thursday, January 28 th 8:15-10:15 Room:
Physics Midterm Review Packet January 2010 This Packet is a Study Guide, not a replacement for studying from your notes, tests, quizzes, and textbook. Midterm Date: Thursday, January 28 th 8:15-10:15 Room:
1. First-order Ordinary Differential Equations
 Advanced Engineering Mathematics 1. First-order ODEs 1 1. First-order Ordinary Differential Equations 1.1 Basic concept and ideas 1.2 Geometrical meaning of direction fields 1.3 Separable differential
Advanced Engineering Mathematics 1. First-order ODEs 1 1. First-order Ordinary Differential Equations 1.1 Basic concept and ideas 1.2 Geometrical meaning of direction fields 1.3 Separable differential
Don't Forget the Differential Equations: Finishing 2005 BC4
 connect to college success Don't Forget the Differential Equations: Finishing 005 BC4 Steve Greenfield available on apcentral.collegeboard.com connect to college success www.collegeboard.com The College
connect to college success Don't Forget the Differential Equations: Finishing 005 BC4 Steve Greenfield available on apcentral.collegeboard.com connect to college success www.collegeboard.com The College
Copyrighted Material. Chapter 1 DEGREE OF A CURVE
 Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
tegrals as General & Particular Solutions
 tegrals as General & Particular Solutions dy dx = f(x) General Solution: y(x) = f(x) dx + C Particular Solution: dy dx = f(x), y(x 0) = y 0 Examples: 1) dy dx = (x 2)2 ;y(2) = 1; 2) dy ;y(0) = 0; 3) dx
tegrals as General & Particular Solutions dy dx = f(x) General Solution: y(x) = f(x) dx + C Particular Solution: dy dx = f(x), y(x 0) = y 0 Examples: 1) dy dx = (x 2)2 ;y(2) = 1; 2) dy ;y(0) = 0; 3) dx
Cost Minimization and the Cost Function
 Cost Minimization and the Cost Function Juan Manuel Puerta October 5, 2009 So far we focused on profit maximization, we could look at a different problem, that is the cost minimization problem. This is
Cost Minimization and the Cost Function Juan Manuel Puerta October 5, 2009 So far we focused on profit maximization, we could look at a different problem, that is the cost minimization problem. This is
Coffeyville Community College #MATH 202 COURSE SYLLABUS FOR DIFFERENTIAL EQUATIONS. Ryan Willis Instructor
 Coffeyville Community College #MATH 202 COURSE SYLLABUS FOR DIFFERENTIAL EQUATIONS Ryan Willis Instructor COURSE NUMBER: MATH 202 COURSE TITLE: Differential Equations CREDIT HOURS: 3 INSTRUCTOR: OFFICE
Coffeyville Community College #MATH 202 COURSE SYLLABUS FOR DIFFERENTIAL EQUATIONS Ryan Willis Instructor COURSE NUMBER: MATH 202 COURSE TITLE: Differential Equations CREDIT HOURS: 3 INSTRUCTOR: OFFICE

SOLUTIONS TO HOMEWORK ASSIGNMENT #4, MATH 253
 SOLUTIONS TO HOMEWORK ASSIGNMENT #4, MATH 253 1. Prove that the following differential equations are satisfied by the given functions: (a) 2 u + 2 u 2 y + 2 u 2 z =0,whereu 2 =(x2 + y 2 + z 2 ) 1/2. (b)
SOLUTIONS TO HOMEWORK ASSIGNMENT #4, MATH 253 1. Prove that the following differential equations are satisfied by the given functions: (a) 2 u + 2 u 2 y + 2 u 2 z =0,whereu 2 =(x2 + y 2 + z 2 ) 1/2. (b)
Aim: How do we find the slope of a line? Warm Up: Go over test. A. Slope -
 Aim: How do we find the slope of a line? Warm Up: Go over test A. Slope - Plot the points and draw a line through the given points. Find the slope of the line.. A(-5,4) and B(4,-3) 2. A(4,3) and B(4,-6)
Aim: How do we find the slope of a line? Warm Up: Go over test A. Slope - Plot the points and draw a line through the given points. Find the slope of the line.. A(-5,4) and B(4,-3) 2. A(4,3) and B(4,-6)
Class Meeting # 1: Introduction to PDEs
 MATH 18.152 COURSE NOTES - CLASS MEETING # 1 18.152 Introduction to PDEs, Fall 2011 Professor: Jared Speck Class Meeting # 1: Introduction to PDEs 1. What is a PDE? We will be studying functions u = u(x
MATH 18.152 COURSE NOTES - CLASS MEETING # 1 18.152 Introduction to PDEs, Fall 2011 Professor: Jared Speck Class Meeting # 1: Introduction to PDEs 1. What is a PDE? We will be studying functions u = u(x
(Refer Slide Time: 1:42)
") Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 10 Curves So today we are going to have a new topic. So far
Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 10 Curves So today we are going to have a new topic. So far
Consumer Theory. The consumer s problem
 Consumer Theory The consumer s problem 1 The Marginal Rate of Substitution (MRS) We define the MRS(x,y) as the absolute value of the slope of the line tangent to the indifference curve at point point (x,y).
Consumer Theory The consumer s problem 1 The Marginal Rate of Substitution (MRS) We define the MRS(x,y) as the absolute value of the slope of the line tangent to the indifference curve at point point (x,y).
Algebra 2 PreAP. Name Period
 Algebra 2 PreAP Name Period IMPORTANT INSTRUCTIONS FOR STUDENTS!!! We understand that students come to Algebra II with different strengths and needs. For this reason, students have options for completing
Algebra 2 PreAP Name Period IMPORTANT INSTRUCTIONS FOR STUDENTS!!! We understand that students come to Algebra II with different strengths and needs. For this reason, students have options for completing
MATHEMATICS Unit Pure Core 2
 General Certificate of Education January 2008 Advanced Subsidiary Examination MATHEMATICS Unit Pure Core 2 MPC2 Wednesday 9 January 2008 1.30 pm to 3.00 pm For this paper you must have: an 8-page answer
General Certificate of Education January 2008 Advanced Subsidiary Examination MATHEMATICS Unit Pure Core 2 MPC2 Wednesday 9 January 2008 1.30 pm to 3.00 pm For this paper you must have: an 8-page answer
Gravity Field and Dynamics of the Earth
 Milan Bursa Karel Pec Gravity Field and Dynamics of the Earth With 89 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo HongKong Barcelona Budapest Preface v Introduction 1 1 Fundamentals
Milan Bursa Karel Pec Gravity Field and Dynamics of the Earth With 89 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo HongKong Barcelona Budapest Preface v Introduction 1 1 Fundamentals
Understanding Basic Calculus
 Understanding Basic Calculus S.K. Chung Dedicated to all the people who have helped me in my life. i Preface This book is a revised and expanded version of the lecture notes for Basic Calculus and other
Understanding Basic Calculus S.K. Chung Dedicated to all the people who have helped me in my life. i Preface This book is a revised and expanded version of the lecture notes for Basic Calculus and other
G.A. Pavliotis. Department of Mathematics. Imperial College London
 EE1 MATHEMATICS NUMERICAL METHODS G.A. Pavliotis Department of Mathematics Imperial College London 1. Numerical solution of nonlinear equations (iterative processes). 2. Numerical evaluation of integrals.
EE1 MATHEMATICS NUMERICAL METHODS G.A. Pavliotis Department of Mathematics Imperial College London 1. Numerical solution of nonlinear equations (iterative processes). 2. Numerical evaluation of integrals.
Aim. Decimal Search. An Excel 'macro' was used to do the calculations. A copy of the script can be found in Appendix A.
 Aim The aim of this investigation is to use and compare three different methods of finding specific solutions to polynomials that cannot be solved algebraically. The methods that will be considered are;
Aim The aim of this investigation is to use and compare three different methods of finding specific solutions to polynomials that cannot be solved algebraically. The methods that will be considered are;
Adding vectors We can do arithmetic with vectors. We ll start with vector addition and related operations. Suppose you have two vectors
 1 Chapter 13. VECTORS IN THREE DIMENSIONAL SPACE Let s begin with some names and notation for things: R is the set (collection) of real numbers. We write x R to mean that x is a real number. A real number
1 Chapter 13. VECTORS IN THREE DIMENSIONAL SPACE Let s begin with some names and notation for things: R is the set (collection) of real numbers. We write x R to mean that x is a real number. A real number
16.1 Runge-Kutta Method
 70 Chapter 6. Integration of Ordinary Differential Equations CITED REFERENCES AND FURTHER READING: Gear, C.W. 97, Numerical Initial Value Problems in Ordinary Differential Equations (Englewood Cliffs,
70 Chapter 6. Integration of Ordinary Differential Equations CITED REFERENCES AND FURTHER READING: Gear, C.W. 97, Numerical Initial Value Problems in Ordinary Differential Equations (Englewood Cliffs,
Chapter 7 Nonlinear Systems
 Chapter 7 Nonlinear Systems Nonlinear systems in R n : X = B x. x n X = F (t; X) F (t; x ; :::; x n ) B C A ; F (t; X) =. F n (t; x ; :::; x n ) When F (t; X) = F (X) is independent of t; it is an example
Chapter 7 Nonlinear Systems Nonlinear systems in R n : X = B x. x n X = F (t; X) F (t; x ; :::; x n ) B C A ; F (t; X) =. F n (t; x ; :::; x n ) When F (t; X) = F (X) is independent of t; it is an example
Module 1 : Conduction. Lecture 5 : 1D conduction example problems. 2D conduction
 Module 1 : Conduction Lecture 5 : 1D conduction example problems. 2D conduction Objectives In this class: An example of optimization for insulation thickness is solved. The 1D conduction is considered
Module 1 : Conduction Lecture 5 : 1D conduction example problems. 2D conduction Objectives In this class: An example of optimization for insulation thickness is solved. The 1D conduction is considered