Course 8. An Introduction to the Kalman Filter
|
|
|
- Andrew Pitts
- 9 years ago
- Views:
Transcription
1 Course 8 An Introduction to the Kalman Filter

2 Speakers Greg Welch Gary Bishop

3 Kalman Filters in 2 hours? Hah! No magic. Pretty simple to apply. Tolerant of abuse. Notes are a standalone reference. These slides are online at cs.unc.edu/~tracker/ref/s2001/ /~tracker/ref/s2001/kalman/

4 Rudolf Emil Kalman Born 1930 in Hungary BS and MS from MIT PhD 1957 from Columbia Filter developed in Now retired

5 What is a Kalman Filter? Just some applied math. A linear system: f(a+b) = f(a) + f(b). Noisy data in hopefully less noisy out. But delay is the price for filtering... Pure KF does not even adapt to the data.

6 What is it used for? Tracking missiles Tracking heads/hands/drumsticks Extracting lip motion from video Fitting Bezier patches to point data Lots of computer vision applications Economics Navigation

7 A really simple example
8 Gary makes a measurement z σ 2 1, z 1 Conditional Density Function x ˆ = z 1 1 N(z 1,σ 2 z1 ) σ ˆ 2 = σ 2 1 z
 σ ˆ 2 = σ 2 1 z 1-2 0 2 4 6")
9 Greg makes a measurement z σ 2 2, z 2 Conditional Density Function x ˆ =...? 2 N(z 1,σ 2 z1 ) σ ˆ 2 =...?
 σ ˆ 2 =.")
10 Combine estimates
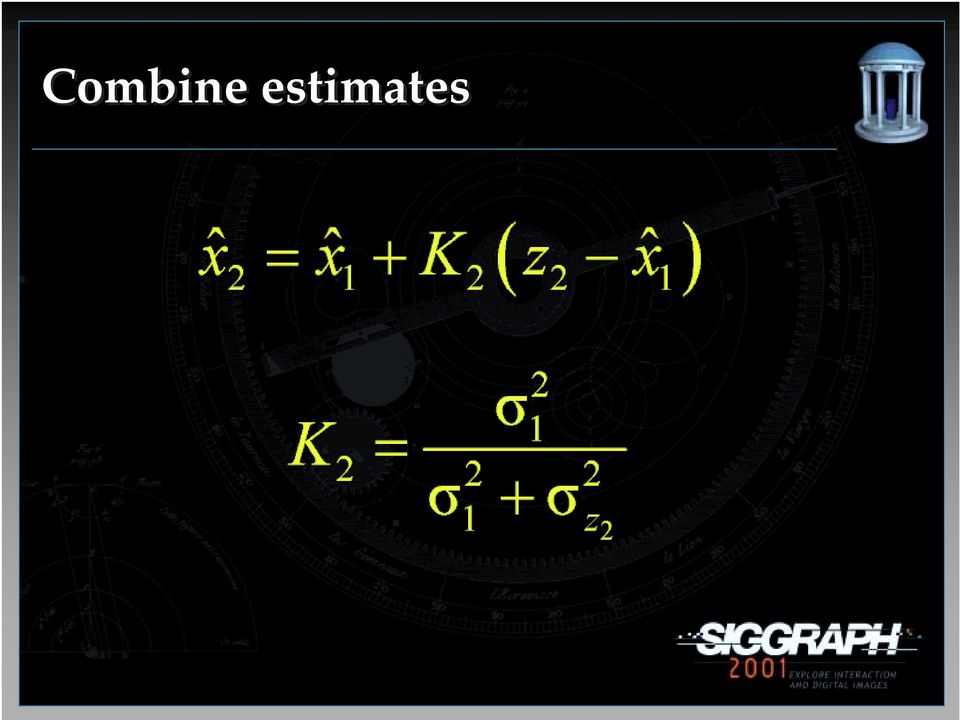
11 Combine variances

12 Combined Estimates Conditional Density Function x ˆ = x ˆ 2 N( x,ˆ ˆ σ 2 ) σ ˆ 2 = σ Online weighted average!

13 But suppose we re moving Not all the difference is error Some may be motion KF can include a motion model Estimate velocity and position

14 Process Model Describes how the state changes over time The state for the first example was scalar The process model was nothing changes A better model might be State is a 2-vector [ position, velocity ] position n+1 = position n + velocity n * time velocity n+1 = velocity n

15 Measurement Model What you see from where you are not Where you are from what you see

16 Predict Correct KF operates by Predicting the new state and its uncertainty Correcting with the new measurement predict correct

17 Example: 2D Position-Only (Greg Welch)
18 Apparatus: 2D Tablet
19 Process Model x y k k state x k x = y state transition A k 1 k 1 xstate k 1 x = Ax + w k k 1 k 1 x + ~ k 1 ~ y k 1 wnoise k 1

20 Measurement Model u v k k z k measurement H = 0 x 0 H measurement matrix H y x y k k state x k u + ~ k ~ v k noise v k z = Hx + v k k k

21 Preparation A = State Transition Q Q E w w T xx = { 0 }= 0 Q R R E v v T xx = { 0 }= 0 R yy yy Process Noise Covariance Measurement Noise Covariance
22 Initialization x = Hz P = ε 0 0 ε
23 PREDICT x k k = Axk 1 P = AP A + Q k 1 transition uncertainty T
24 CORRECT ( ) k k k k x = x + K z Hx P = I actual KH P k ( ) k predicted ( ) T T 1 k k K = P H HP H + R denominator (measurement space)
25 Summary x k = Axk 1 T P = AP A + Q k k 1 ( ) T T K = P H HP H + R 1 k k ( ) x = x + K z Hx k k k k k = ( ) k P I KH P
26 Results: XY Track y [meters] Truth Estimate x [meters]
27 Y Track: Moving then Still y [meters] Truth Estimate Time [seconds]
28 Motion-Dependent Performance Truth Estimate Measurement significant latency when moving relatively smooth when not
29 Example: 2D Position-Velocity (PV Model)
30 Process Model (PV) state transition 1 0 dt dt state x y dx dt dy dt
31 Measurement Model (Same) measurement matrix H x 0 H 0 0 y state x y dx dt dy dt
32 Different Performance Truth Estimate Measurement improved latency when moving relatively noisy when not
33 Example: 6D HiBall Tracker (x, y, z, roll, pitch, yaw)
34 Apparatus HiBall with six optical sensors Ceiling panel with LEDs
35 State Vector (PV) x d d T τ ρ τ ρ λ dt dt = [ ] τ = ρ = dτ = dt dρ = dt λ = translation (3D) rotation (3D) linear velocity (3D) angular velocity (3D) LED position (3D)
36 Non-Linear Measurement Model Non-Linear Measurement Model u v c c c c x z y z = c c c V x y z = ( ) ( ) rotate ρ λ τ view matrix
37 SCAAT vs. MCAAT Single or Multiple Constraint(s) at a Time Dimension of the measurement Nothing about KF mathematics restricts it Can process in batch or sequential mode SCAAT Estimate 15 parameters with 2D measurements Temporal improvements Autocalibration of LED positions
38 HiBall Initialization Initialize pose using a brute-force (relatively slow) MCAAT approach Initial velocities = 0 Initial process covariance P 0 = ~cm/degrees Transition to SCAAT Kalman filter
39 Nonlinear Systems (Gary Bishop)
40 Kalman Filter assumes linearity Only matrix operations allowed Measurement is a linear function of state Next state is linear function of previous state Can t t estimate gain Can t t handle rotations (angles in state) Can t t handle projection
41 Extended Kalman Filter Nonlinear Process (Model) Process dynamics: A becomes a(x) Measurement: H becomes h(x) Filter Reformulation Use functions instead of matrices Use Jacobians to project forward, and to relate measurement to state
42 Jacobian? Partial derivative of measurement with respect to state If measurement is a vector of length M And state has length N Jacobian of measurement function will be MxN matrix of numbers (not equations) Often evaluating h(x) and Jacobian(h(x)) at the same time cost only a little extra
43 Tips Don t t compute giant symbolic Jacobian with a symbolic algebra package Do use an automatic method during development Check out tools from optimization packages Differentiating your function line-by-line is usually pretty easy
44 New Approaches Several extensions are available that work better than the EKF in some circumstances
45 System Identification Model Form and Parameters (Greg Welch)


46 Measurement Noise (R)
47 Sampled Process Noise (Q) For continuous model dx dt = Fx + Q c The sampled (discrete) Q is dt Q = e Fτ Q e F T τ dτ d c 0
48 Example: 2D PV Model For continuous model dx dt = 0 1 x q The sampled (discrete) Q is dt q Qd = dt 2 q 3 dt q 2 2 dt q 3 2
49 Parameter Optimization "Clean" and realistic state data Measurement model Truth True measurement data + Noise True State Error ( Cost) Estimated State - Kalman filter
50 Multiple-Model Configurations Off or On-Line Model Selection
51 Off-Line Model Selection simulated measurement sequence Z 1,Z 2,,Z k Optimizer 1 Optimizer 2 Optimizer n
52 On-Line Multiple-Model Estimation Actual meas. seq. Z* p(µ 1 z, µ1 ) KFµ p(µ 1 1 z, ) µ1 KFµ 2 KFµ n ~ X µ1 ~ X µ2 ~ X µn p(µ 2 z, ) µ2 p(µ n z, ) µn Σ x ( = { x µn k, P k, H, R }
53 Probability of Model µ For model µ with Π ={ xphr,,, } µ 1 ( z Hx) C ( z Hx) T p( 1 1 µ z, Π )= µ e 2 ( n π C ) 2 2 where C = HPH T + R
54 Final Combined Estimate ) x = µ xƒ µ ν p( µ z, Π ) µ p( ν z, Π ) ν
55 Example: P/PV Multiple-Model Truth Estimate y [meters] Time [seconds]
56 MME Weighting 1 y [meters] Time [seconds] p(µ P z,π µ P )
57 Low-Latency During Motion Truth ooooo P Estimate PV Estimate MM Estimate Time [seconds]
58 Smooth When Still Truth ooooo P Estimate PV Estimate MM Estimate Time [seconds]
59 Conclusions Suggestions and Resources (Greg Welch)
60 Many Applications (Examples) Engineering Robotics, spacecraft, aircraft, automobiles Computer Tracking, real-time graphics, computer vision Economics Forecasting economic indicators Other Telephone and electricity loads
61 Kalman Filter Web Site Electronic and printed references Book lists and recommendations Research papers Links to other sites Some software News


62 Java-Based KF Learning Tool On-line 1D simulation Linear and non-linear Variable dynamics
63 KF Course Web Page ( ) Electronic version of course pack (updated) Java-Based KF Learning Tool KF web page See also notes for Course 11 (Tracking)
64 Closing Remarks Try it! Not too hard to understand or program Start simple Experiment in 1D Make your own filter in Matlab, etc. Note: the Kalman filter wants to work Debugging can be difficult Errors can go un-noticed
65 End
Understanding and Applying Kalman Filtering
 Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
An Introduction to the Kalman Filter
 An Introduction to the Kalman Filter Greg Welch 1 and Gary Bishop 2 TR 95041 Department of Computer Science University of North Carolina at Chapel Hill Chapel Hill, NC 275993175 Updated: Monday, July 24,
An Introduction to the Kalman Filter Greg Welch 1 and Gary Bishop 2 TR 95041 Department of Computer Science University of North Carolina at Chapel Hill Chapel Hill, NC 275993175 Updated: Monday, July 24,
An Introduction to the Kalman Filter
 SIGGRAPH 2001 Course 8 An Introduction to the Kalman Filter Greg Welch Gary Bishop University of North Carolina at Chapel Hill Department of Computer Science Chapel Hill, NC 275993175 http://www.cs.unc.edu/~{welch,
SIGGRAPH 2001 Course 8 An Introduction to the Kalman Filter Greg Welch Gary Bishop University of North Carolina at Chapel Hill Department of Computer Science Chapel Hill, NC 275993175 http://www.cs.unc.edu/~{welch,
A Reliability Point and Kalman Filter-based Vehicle Tracking Technique
 A Reliability Point and Kalman Filter-based Vehicle Tracing Technique Soo Siang Teoh and Thomas Bräunl Abstract This paper introduces a technique for tracing the movement of vehicles in consecutive video
A Reliability Point and Kalman Filter-based Vehicle Tracing Technique Soo Siang Teoh and Thomas Bräunl Abstract This paper introduces a technique for tracing the movement of vehicles in consecutive video
Mathieu St-Pierre. Denis Gingras Dr. Ing.
 Comparison between the unscented Kalman filter and the extended Kalman filter for the position estimation module of an integrated navigation information system Mathieu St-Pierre Electrical engineering
Comparison between the unscented Kalman filter and the extended Kalman filter for the position estimation module of an integrated navigation information system Mathieu St-Pierre Electrical engineering
EE 570: Location and Navigation
 EE 570: Location and Navigation On-Line Bayesian Tracking Aly El-Osery 1 Stephen Bruder 2 1 Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA 2 Electrical and Computer Engineering
EE 570: Location and Navigation On-Line Bayesian Tracking Aly El-Osery 1 Stephen Bruder 2 1 Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA 2 Electrical and Computer Engineering
Kalman Filter Applied to a Active Queue Management Problem
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 4 Ver. III (Jul Aug. 2014), PP 23-27 Jyoti Pandey 1 and Prof. Aashih Hiradhar 2 Department
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 4 Ver. III (Jul Aug. 2014), PP 23-27 Jyoti Pandey 1 and Prof. Aashih Hiradhar 2 Department
Nonlinear Algebraic Equations. Lectures INF2320 p. 1/88
 Nonlinear Algebraic Equations Lectures INF2320 p. 1/88 Lectures INF2320 p. 2/88 Nonlinear algebraic equations When solving the system u (t) = g(u), u(0) = u 0, (1) with an implicit Euler scheme we have
Nonlinear Algebraic Equations Lectures INF2320 p. 1/88 Lectures INF2320 p. 2/88 Nonlinear algebraic equations When solving the system u (t) = g(u), u(0) = u 0, (1) with an implicit Euler scheme we have
Onboard electronics of UAVs
 AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
To give it a definition, an implicit function of x and y is simply any relationship that takes the form:
 2 Implicit function theorems and applications 21 Implicit functions The implicit function theorem is one of the most useful single tools you ll meet this year After a while, it will be second nature to
2 Implicit function theorems and applications 21 Implicit functions The implicit function theorem is one of the most useful single tools you ll meet this year After a while, it will be second nature to
Lecture L3 - Vectors, Matrices and Coordinate Transformations
 S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist
 Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist MHER GRIGORIAN, TAREK SOBH Department of Computer Science and Engineering, U. of Bridgeport, USA ABSTRACT Robot
Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist MHER GRIGORIAN, TAREK SOBH Department of Computer Science and Engineering, U. of Bridgeport, USA ABSTRACT Robot
The Technical Archer. Austin Wargo
 The Technical Archer Austin Wargo May 14, 2010 Abstract A mathematical model of the interactions between a long bow and an arrow. The model uses the Euler-Lagrange formula, and is based off conservation
The Technical Archer Austin Wargo May 14, 2010 Abstract A mathematical model of the interactions between a long bow and an arrow. The model uses the Euler-Lagrange formula, and is based off conservation
CITY UNIVERSITY LONDON. BEng Degree in Computer Systems Engineering Part II BSc Degree in Computer Systems Engineering Part III PART 2 EXAMINATION
 No: CITY UNIVERSITY LONDON BEng Degree in Computer Systems Engineering Part II BSc Degree in Computer Systems Engineering Part III PART 2 EXAMINATION ENGINEERING MATHEMATICS 2 (resit) EX2005 Date: August
No: CITY UNIVERSITY LONDON BEng Degree in Computer Systems Engineering Part II BSc Degree in Computer Systems Engineering Part III PART 2 EXAMINATION ENGINEERING MATHEMATICS 2 (resit) EX2005 Date: August
TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA
 2015 School of Information Technology and Electrical Engineering at the University of Queensland TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA Schedule Week Date
2015 School of Information Technology and Electrical Engineering at the University of Queensland TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA Schedule Week Date
INSTRUCTOR WORKBOOK Quanser Robotics Package for Education for MATLAB /Simulink Users
 INSTRUCTOR WORKBOOK for MATLAB /Simulink Users Developed by: Amir Haddadi, Ph.D., Quanser Peter Martin, M.A.SC., Quanser Quanser educational solutions are powered by: CAPTIVATE. MOTIVATE. GRADUATE. PREFACE
INSTRUCTOR WORKBOOK for MATLAB /Simulink Users Developed by: Amir Haddadi, Ph.D., Quanser Peter Martin, M.A.SC., Quanser Quanser educational solutions are powered by: CAPTIVATE. MOTIVATE. GRADUATE. PREFACE
A QUICK GUIDE TO THE FORMULAS OF MULTIVARIABLE CALCULUS
 A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
Numerical methods for American options
 Lecture 9 Numerical methods for American options Lecture Notes by Andrzej Palczewski Computational Finance p. 1 American options The holder of an American option has the right to exercise it at any moment
Lecture 9 Numerical methods for American options Lecture Notes by Andrzej Palczewski Computational Finance p. 1 American options The holder of an American option has the right to exercise it at any moment
Path Tracking for a Miniature Robot
 Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
DERIVATIVES AS MATRICES; CHAIN RULE
 DERIVATIVES AS MATRICES; CHAIN RULE 1. Derivatives of Real-valued Functions Let s first consider functions f : R 2 R. Recall that if the partial derivatives of f exist at the point (x 0, y 0 ), then we
DERIVATIVES AS MATRICES; CHAIN RULE 1. Derivatives of Real-valued Functions Let s first consider functions f : R 2 R. Recall that if the partial derivatives of f exist at the point (x 0, y 0 ), then we
High Accuracy Articulated Robots with CNC Control Systems
 Copyright 2012 SAE International 2013-01-2292 High Accuracy Articulated Robots with CNC Control Systems Bradley Saund, Russell DeVlieg Electroimpact Inc. ABSTRACT A robotic arm manipulator is often an
Copyright 2012 SAE International 2013-01-2292 High Accuracy Articulated Robots with CNC Control Systems Bradley Saund, Russell DeVlieg Electroimpact Inc. ABSTRACT A robotic arm manipulator is often an
Fitting Subject-specific Curves to Grouped Longitudinal Data
 Fitting Subject-specific Curves to Grouped Longitudinal Data Djeundje, Viani Heriot-Watt University, Department of Actuarial Mathematics & Statistics Edinburgh, EH14 4AS, UK E-mail: [email protected] Currie,
Fitting Subject-specific Curves to Grouped Longitudinal Data Djeundje, Viani Heriot-Watt University, Department of Actuarial Mathematics & Statistics Edinburgh, EH14 4AS, UK E-mail: [email protected] Currie,
15.062 Data Mining: Algorithms and Applications Matrix Math Review
 .6 Data Mining: Algorithms and Applications Matrix Math Review The purpose of this document is to give a brief review of selected linear algebra concepts that will be useful for the course and to develop
.6 Data Mining: Algorithms and Applications Matrix Math Review The purpose of this document is to give a brief review of selected linear algebra concepts that will be useful for the course and to develop
The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w
![The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w](/thumbs/25/5134815.jpg "The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w") Chapter 4 Vehicle Dynamics 4.. Introduction In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration
Chapter 4 Vehicle Dynamics 4.. Introduction In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration
Determining Polar Axis Alignment Accuracy
 Determining Polar Axis Alignment Accuracy by Frank Barrett 7/6/008 Abstract: In order to photograph dim celestial objects, long exposures on the order of minutes or hours are required. To perform this
Determining Polar Axis Alignment Accuracy by Frank Barrett 7/6/008 Abstract: In order to photograph dim celestial objects, long exposures on the order of minutes or hours are required. To perform this
Math 241, Exam 1 Information.
 Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Lecture L29-3D Rigid Body Dynamics
 J. Peraire, S. Widnall 16.07 Dynamics Fall 2009 Version 2.0 Lecture L29-3D Rigid Body Dynamics 3D Rigid Body Dynamics: Euler Angles The difficulty of describing the positions of the body-fixed axis of
J. Peraire, S. Widnall 16.07 Dynamics Fall 2009 Version 2.0 Lecture L29-3D Rigid Body Dynamics 3D Rigid Body Dynamics: Euler Angles The difficulty of describing the positions of the body-fixed axis of
[1] Diagonal factorization
![[1] Diagonal factorization](/thumbs/40/21671034.jpg "[1] Diagonal factorization") 8.03 LA.6: Diagonalization and Orthogonal Matrices [ Diagonal factorization [2 Solving systems of first order differential equations [3 Symmetric and Orthonormal Matrices [ Diagonal factorization Recall:
8.03 LA.6: Diagonalization and Orthogonal Matrices [ Diagonal factorization [2 Solving systems of first order differential equations [3 Symmetric and Orthonormal Matrices [ Diagonal factorization Recall:
Introduction to Robotics Analysis, Systems, Applications
 Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
Automated Stellar Classification for Large Surveys with EKF and RBF Neural Networks
 Chin. J. Astron. Astrophys. Vol. 5 (2005), No. 2, 203 210 (http:/www.chjaa.org) Chinese Journal of Astronomy and Astrophysics Automated Stellar Classification for Large Surveys with EKF and RBF Neural
Chin. J. Astron. Astrophys. Vol. 5 (2005), No. 2, 203 210 (http:/www.chjaa.org) Chinese Journal of Astronomy and Astrophysics Automated Stellar Classification for Large Surveys with EKF and RBF Neural
Master s thesis tutorial: part III
 for the Autonomous Compliant Research group Tinne De Laet, Wilm Decré, Diederik Verscheure Katholieke Universiteit Leuven, Department of Mechanical Engineering, PMA Division 30 oktober 2006 Outline General
for the Autonomous Compliant Research group Tinne De Laet, Wilm Decré, Diederik Verscheure Katholieke Universiteit Leuven, Department of Mechanical Engineering, PMA Division 30 oktober 2006 Outline General
Essential Mathematics for Computer Graphics fast
 John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation. Prof. Dr. Hani Hagras
 1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
Lecture 2 Linear functions and examples
 EE263 Autumn 2007-08 Stephen Boyd Lecture 2 Linear functions and examples linear equations and functions engineering examples interpretations 2 1 Linear equations consider system of linear equations y
EE263 Autumn 2007-08 Stephen Boyd Lecture 2 Linear functions and examples linear equations and functions engineering examples interpretations 2 1 Linear equations consider system of linear equations y
Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm
 1 Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm Hani Mehrpouyan, Student Member, IEEE, Department of Electrical and Computer Engineering Queen s University, Kingston, Ontario,
1 Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm Hani Mehrpouyan, Student Member, IEEE, Department of Electrical and Computer Engineering Queen s University, Kingston, Ontario,
ASEN 3112 - Structures. MDOF Dynamic Systems. ASEN 3112 Lecture 1 Slide 1
 19 MDOF Dynamic Systems ASEN 3112 Lecture 1 Slide 1 A Two-DOF Mass-Spring-Dashpot Dynamic System Consider the lumped-parameter, mass-spring-dashpot dynamic system shown in the Figure. It has two point
19 MDOF Dynamic Systems ASEN 3112 Lecture 1 Slide 1 A Two-DOF Mass-Spring-Dashpot Dynamic System Consider the lumped-parameter, mass-spring-dashpot dynamic system shown in the Figure. It has two point
Mobile Robot FastSLAM with Xbox Kinect
 Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
Part 4 fitting with energy loss and multiple scattering non gaussian uncertainties outliers
 Part 4 fitting with energy loss and multiple scattering non gaussian uncertainties outliers material intersections to treat material effects in track fit, locate material 'intersections' along particle
Part 4 fitting with energy loss and multiple scattering non gaussian uncertainties outliers material intersections to treat material effects in track fit, locate material 'intersections' along particle
Class Meeting # 1: Introduction to PDEs
 MATH 18.152 COURSE NOTES - CLASS MEETING # 1 18.152 Introduction to PDEs, Fall 2011 Professor: Jared Speck Class Meeting # 1: Introduction to PDEs 1. What is a PDE? We will be studying functions u = u(x
MATH 18.152 COURSE NOTES - CLASS MEETING # 1 18.152 Introduction to PDEs, Fall 2011 Professor: Jared Speck Class Meeting # 1: Introduction to PDEs 1. What is a PDE? We will be studying functions u = u(x
MULTIVARIATE PROBABILITY DISTRIBUTIONS
 MULTIVARIATE PROBABILITY DISTRIBUTIONS. PRELIMINARIES.. Example. Consider an experiment that consists of tossing a die and a coin at the same time. We can consider a number of random variables defined
MULTIVARIATE PROBABILITY DISTRIBUTIONS. PRELIMINARIES.. Example. Consider an experiment that consists of tossing a die and a coin at the same time. We can consider a number of random variables defined
4 Microscopic dynamics
 4 Microscopic dynamics In this section we will look at the first model that people came up with when they started to model polymers from the microscopic level. It s called the Oldroyd B model. We will
4 Microscopic dynamics In this section we will look at the first model that people came up with when they started to model polymers from the microscopic level. It s called the Oldroyd B model. We will
Power Electronics. Prof. K. Gopakumar. Centre for Electronics Design and Technology. Indian Institute of Science, Bangalore.
 Power Electronics Prof. K. Gopakumar Centre for Electronics Design and Technology Indian Institute of Science, Bangalore Lecture - 1 Electric Drive Today, we will start with the topic on industrial drive
Power Electronics Prof. K. Gopakumar Centre for Electronics Design and Technology Indian Institute of Science, Bangalore Lecture - 1 Electric Drive Today, we will start with the topic on industrial drive
Discrete mechanics, optimal control and formation flying spacecraft
 Discrete mechanics, optimal control and formation flying spacecraft Oliver Junge Center for Mathematics Munich University of Technology joint work with Jerrold E. Marsden and Sina Ober-Blöbaum partially
Discrete mechanics, optimal control and formation flying spacecraft Oliver Junge Center for Mathematics Munich University of Technology joint work with Jerrold E. Marsden and Sina Ober-Blöbaum partially
Unified Lecture # 4 Vectors
 Fall 2005 Unified Lecture # 4 Vectors These notes were written by J. Peraire as a review of vectors for Dynamics 16.07. They have been adapted for Unified Engineering by R. Radovitzky. References [1] Feynmann,
Fall 2005 Unified Lecture # 4 Vectors These notes were written by J. Peraire as a review of vectors for Dynamics 16.07. They have been adapted for Unified Engineering by R. Radovitzky. References [1] Feynmann,
Probability for Estimation (review)
") Probability for Estimation (review) In general, we want to develop an estimator for systems of the form: x = f x, u + η(t); y = h x + ω(t); ggggg y, ffff x We will primarily focus on discrete time linear
Probability for Estimation (review) In general, we want to develop an estimator for systems of the form: x = f x, u + η(t); y = h x + ω(t); ggggg y, ffff x We will primarily focus on discrete time linear
3. KINEMATICS IN TWO DIMENSIONS; VECTORS.
 3. KINEMATICS IN TWO DIMENSIONS; VECTORS. Key words: Motion in Two Dimensions, Scalars, Vectors, Addition of Vectors by Graphical Methods, Tail to Tip Method, Parallelogram Method, Negative Vector, Vector
3. KINEMATICS IN TWO DIMENSIONS; VECTORS. Key words: Motion in Two Dimensions, Scalars, Vectors, Addition of Vectors by Graphical Methods, Tail to Tip Method, Parallelogram Method, Negative Vector, Vector
A REVIEW ON KALMAN FILTER FOR GPS TRACKING
 A REVIEW ON KALMAN FILTER FOR GPS TRACKING Ms. SONAL(Student, M.Tech ), Dr. AJIT SINGH (Professor in CSE & IT) Computer Science & Engg. (Network Security) BPS Mahila Vishwavidyalaya Khanpur Kalan, Haryana
A REVIEW ON KALMAN FILTER FOR GPS TRACKING Ms. SONAL(Student, M.Tech ), Dr. AJIT SINGH (Professor in CSE & IT) Computer Science & Engg. (Network Security) BPS Mahila Vishwavidyalaya Khanpur Kalan, Haryana
Fluid Dynamics and the Navier-Stokes Equation
 Fluid Dynamics and the Navier-Stokes Equation CMSC498A: Spring 12 Semester By: Steven Dobek 5/17/2012 Introduction I began this project through a desire to simulate smoke and fire through the use of programming
Fluid Dynamics and the Navier-Stokes Equation CMSC498A: Spring 12 Semester By: Steven Dobek 5/17/2012 Introduction I began this project through a desire to simulate smoke and fire through the use of programming
Lecture 17: Conformal Invariance
 Lecture 17: Conformal Invariance Scribe: Yee Lok Wong Department of Mathematics, MIT November 7, 006 1 Eventual Hitting Probability In previous lectures, we studied the following PDE for ρ(x, t x 0 ) that
Lecture 17: Conformal Invariance Scribe: Yee Lok Wong Department of Mathematics, MIT November 7, 006 1 Eventual Hitting Probability In previous lectures, we studied the following PDE for ρ(x, t x 0 ) that
Lecture 8 : Dynamic Stability
 Lecture 8 : Dynamic Stability Or what happens to small disturbances about a trim condition 1.0 : Dynamic Stability Static stability refers to the tendency of the aircraft to counter a disturbance. Dynamic
Lecture 8 : Dynamic Stability Or what happens to small disturbances about a trim condition 1.0 : Dynamic Stability Static stability refers to the tendency of the aircraft to counter a disturbance. Dynamic
INTRODUCTION (Syllabus, Numerical Methods & Computational Tools)
") INTRODUCTION (Syllabus, Numerical Methods & Computational Tools) A. J. Clark School of Engineering Department of Civil and Environmental Engineering by Dr. Ibrahim A. Assakkaf Spring 2001 ENCE 203 - Computation
INTRODUCTION (Syllabus, Numerical Methods & Computational Tools) A. J. Clark School of Engineering Department of Civil and Environmental Engineering by Dr. Ibrahim A. Assakkaf Spring 2001 ENCE 203 - Computation
KALMAN Filtering techniques can be used either for
 , July 6-8,, London, U.K. Fusion of Non-Contacting Sensors and Vital Parameter Extraction Using Kalman Filtering Jérôme Foussier, Daniel Teichmann, Jing Jia, Steffen Leonhar Abstract This paper describes
, July 6-8,, London, U.K. Fusion of Non-Contacting Sensors and Vital Parameter Extraction Using Kalman Filtering Jérôme Foussier, Daniel Teichmann, Jing Jia, Steffen Leonhar Abstract This paper describes
Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and Motion Optimization for Maritime Robotic Research
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and
Some probability and statistics
 Appendix A Some probability and statistics A Probabilities, random variables and their distribution We summarize a few of the basic concepts of random variables, usually denoted by capital letters, X,Y,
Appendix A Some probability and statistics A Probabilities, random variables and their distribution We summarize a few of the basic concepts of random variables, usually denoted by capital letters, X,Y,
MATH1231 Algebra, 2015 Chapter 7: Linear maps
 MATH1231 Algebra, 2015 Chapter 7: Linear maps A/Prof. Daniel Chan School of Mathematics and Statistics University of New South Wales [email protected] Daniel Chan (UNSW) MATH1231 Algebra 1 / 43 Chapter
MATH1231 Algebra, 2015 Chapter 7: Linear maps A/Prof. Daniel Chan School of Mathematics and Statistics University of New South Wales [email protected] Daniel Chan (UNSW) MATH1231 Algebra 1 / 43 Chapter
Vectors VECTOR PRODUCT. Graham S McDonald. A Tutorial Module for learning about the vector product of two vectors. Table of contents Begin Tutorial
 Vectors VECTOR PRODUCT Graham S McDonald A Tutorial Module for learning about the vector product of two vectors Table of contents Begin Tutorial c 2004 [email protected] 1. Theory 2. Exercises
Vectors VECTOR PRODUCT Graham S McDonald A Tutorial Module for learning about the vector product of two vectors Table of contents Begin Tutorial c 2004 [email protected] 1. Theory 2. Exercises
MODELLING A SATELLITE CONTROL SYSTEM SIMULATOR
 National nstitute for Space Research NPE Space Mechanics and Control Division DMC São José dos Campos, SP, Brasil MODELLNG A SATELLTE CONTROL SYSTEM SMULATOR Luiz C Gadelha Souza [email protected] rd
National nstitute for Space Research NPE Space Mechanics and Control Division DMC São José dos Campos, SP, Brasil MODELLNG A SATELLTE CONTROL SYSTEM SMULATOR Luiz C Gadelha Souza [email protected] rd
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS
 NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK September 2014 Authorized for Distribution by the New York State Education Department This test design and framework document
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK September 2014 Authorized for Distribution by the New York State Education Department This test design and framework document
General Framework for an Iterative Solution of Ax b. Jacobi s Method
 2.6 Iterative Solutions of Linear Systems 143 2.6 Iterative Solutions of Linear Systems Consistent linear systems in real life are solved in one of two ways: by direct calculation (using a matrix factorization,
2.6 Iterative Solutions of Linear Systems 143 2.6 Iterative Solutions of Linear Systems Consistent linear systems in real life are solved in one of two ways: by direct calculation (using a matrix factorization,
Least-Squares Intersection of Lines
 Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
Lab 2: Vector Analysis
 Lab 2: Vector Analysis Objectives: to practice using graphical and analytical methods to add vectors in two dimensions Equipment: Meter stick Ruler Protractor Force table Ring Pulleys with attachments
Lab 2: Vector Analysis Objectives: to practice using graphical and analytical methods to add vectors in two dimensions Equipment: Meter stick Ruler Protractor Force table Ring Pulleys with attachments
1 The basic equations of fluid dynamics
 1 The basic equations of fluid dynamics The main task in fluid dynamics is to find the velocity field describing the flow in a given domain. To do this, one uses the basic equations of fluid flow, which
1 The basic equations of fluid dynamics The main task in fluid dynamics is to find the velocity field describing the flow in a given domain. To do this, one uses the basic equations of fluid flow, which
Physics 201 Homework 8
 Physics 201 Homework 8 Feb 27, 2013 1. A ceiling fan is turned on and a net torque of 1.8 N-m is applied to the blades. 8.2 rad/s 2 The blades have a total moment of inertia of 0.22 kg-m 2. What is the
Physics 201 Homework 8 Feb 27, 2013 1. A ceiling fan is turned on and a net torque of 1.8 N-m is applied to the blades. 8.2 rad/s 2 The blades have a total moment of inertia of 0.22 kg-m 2. What is the
Towards Online Recognition of Handwritten Mathematics
 Towards Online Recognition of Handwritten Mathematics Vadim Mazalov, joint work with Oleg Golubitsky and Stephen M. Watt Ontario Research Centre for Computer Algebra Department of Computer Science Western
Towards Online Recognition of Handwritten Mathematics Vadim Mazalov, joint work with Oleg Golubitsky and Stephen M. Watt Ontario Research Centre for Computer Algebra Department of Computer Science Western
Probability Calculator
 Chapter 95 Introduction Most statisticians have a set of probability tables that they refer to in doing their statistical wor. This procedure provides you with a set of electronic statistical tables that
Chapter 95 Introduction Most statisticians have a set of probability tables that they refer to in doing their statistical wor. This procedure provides you with a set of electronic statistical tables that
An Introduction to Applied Mathematics: An Iterative Process
 An Introduction to Applied Mathematics: An Iterative Process Applied mathematics seeks to make predictions about some topic such as weather prediction, future value of an investment, the speed of a falling
An Introduction to Applied Mathematics: An Iterative Process Applied mathematics seeks to make predictions about some topic such as weather prediction, future value of an investment, the speed of a falling
Modeling and Simulation of a Three Degree of Freedom Longitudinal Aero plane System. Figure 1: Boeing 777 and example of a two engine business jet
 Modeling and Simulation of a Three Degree of Freedom Longitudinal Aero plane System Figure 1: Boeing 777 and example of a two engine business jet Nonlinear dynamic equations of motion for the longitudinal
Modeling and Simulation of a Three Degree of Freedom Longitudinal Aero plane System Figure 1: Boeing 777 and example of a two engine business jet Nonlinear dynamic equations of motion for the longitudinal
1. Fluids Mechanics and Fluid Properties. 1.1 Objectives of this section. 1.2 Fluids
 1. Fluids Mechanics and Fluid Properties What is fluid mechanics? As its name suggests it is the branch of applied mechanics concerned with the statics and dynamics of fluids - both liquids and gases.
1. Fluids Mechanics and Fluid Properties What is fluid mechanics? As its name suggests it is the branch of applied mechanics concerned with the statics and dynamics of fluids - both liquids and gases.
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motivation Recall: Discrete filter Discretize
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motivation Recall: Discrete filter Discretize
Introduction to Engineering System Dynamics
 CHAPTER 0 Introduction to Engineering System Dynamics 0.1 INTRODUCTION The objective of an engineering analysis of a dynamic system is prediction of its behaviour or performance. Real dynamic systems are
CHAPTER 0 Introduction to Engineering System Dynamics 0.1 INTRODUCTION The objective of an engineering analysis of a dynamic system is prediction of its behaviour or performance. Real dynamic systems are
Special Theory of Relativity
 June 1, 2010 1 1 J.D.Jackson, Classical Electrodynamics, 3rd Edition, Chapter 11 Introduction Einstein s theory of special relativity is based on the assumption (which might be a deep-rooted superstition
June 1, 2010 1 1 J.D.Jackson, Classical Electrodynamics, 3rd Edition, Chapter 11 Introduction Einstein s theory of special relativity is based on the assumption (which might be a deep-rooted superstition
AP1 Oscillations. 1. Which of the following statements about a spring-block oscillator in simple harmonic motion about its equilibrium point is false?
 1. Which of the following statements about a spring-block oscillator in simple harmonic motion about its equilibrium point is false? (A) The displacement is directly related to the acceleration. (B) The
1. Which of the following statements about a spring-block oscillator in simple harmonic motion about its equilibrium point is false? (A) The displacement is directly related to the acceleration. (B) The
Chapter 11 Equilibrium
 11.1 The First Condition of Equilibrium The first condition of equilibrium deals with the forces that cause possible translations of a body. The simplest way to define the translational equilibrium of
11.1 The First Condition of Equilibrium The first condition of equilibrium deals with the forces that cause possible translations of a body. The simplest way to define the translational equilibrium of
SECOND DERIVATIVE TEST FOR CONSTRAINED EXTREMA
 SECOND DERIVATIVE TEST FOR CONSTRAINED EXTREMA This handout presents the second derivative test for a local extrema of a Lagrange multiplier problem. The Section 1 presents a geometric motivation for the
SECOND DERIVATIVE TEST FOR CONSTRAINED EXTREMA This handout presents the second derivative test for a local extrema of a Lagrange multiplier problem. The Section 1 presents a geometric motivation for the
Metrics on SO(3) and Inverse Kinematics
 and Inverse Kinematics") Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Part I. Basic Maths for Game Design
 Part I Basic Maths for Game Design 1 Chapter 1 Basic Vector Algebra 1.1 What's a vector? Why do you need it? A vector is a mathematical object used to represent some magnitudes. For example, temperature
Part I Basic Maths for Game Design 1 Chapter 1 Basic Vector Algebra 1.1 What's a vector? Why do you need it? A vector is a mathematical object used to represent some magnitudes. For example, temperature
The two dimensional heat equation
 The two dimensional heat equation Ryan C. Trinity University Partial Differential Equations March 6, 2012 Physical motivation Consider a thin rectangular plate made of some thermally conductive material.
The two dimensional heat equation Ryan C. Trinity University Partial Differential Equations March 6, 2012 Physical motivation Consider a thin rectangular plate made of some thermally conductive material.
Distributionally Robust Optimization with ROME (part 2)
") Distributionally Robust Optimization with ROME (part 2) Joel Goh Melvyn Sim Department of Decision Sciences NUS Business School, Singapore 18 Jun 2009 NUS Business School Guest Lecture J. Goh, M. Sim (NUS)
Distributionally Robust Optimization with ROME (part 2) Joel Goh Melvyn Sim Department of Decision Sciences NUS Business School, Singapore 18 Jun 2009 NUS Business School Guest Lecture J. Goh, M. Sim (NUS)
Math 461 Fall 2006 Test 2 Solutions
 Math 461 Fall 2006 Test 2 Solutions Total points: 100. Do all questions. Explain all answers. No notes, books, or electronic devices. 1. [105+5 points] Assume X Exponential(λ). Justify the following two
Math 461 Fall 2006 Test 2 Solutions Total points: 100. Do all questions. Explain all answers. No notes, books, or electronic devices. 1. [105+5 points] Assume X Exponential(λ). Justify the following two
K.Prasanna NIT Rourkela,India Summer Internship NUS
 K.Prasanna NIT Rourkela,India Summer Internship NUS LOCALIZATION Vehicle localization is an important topic as it finds its application in a multitude of fields like autonomous navigation and tracking
K.Prasanna NIT Rourkela,India Summer Internship NUS LOCALIZATION Vehicle localization is an important topic as it finds its application in a multitude of fields like autonomous navigation and tracking
Review Jeopardy. Blue vs. Orange. Review Jeopardy
 Review Jeopardy Blue vs. Orange Review Jeopardy Jeopardy Round Lectures 0-3 Jeopardy Round $200 How could I measure how far apart (i.e. how different) two observations, y 1 and y 2, are from each other?
Review Jeopardy Blue vs. Orange Review Jeopardy Jeopardy Round Lectures 0-3 Jeopardy Round $200 How could I measure how far apart (i.e. how different) two observations, y 1 and y 2, are from each other?
MATH 304 Linear Algebra Lecture 20: Inner product spaces. Orthogonal sets.
 MATH 304 Linear Algebra Lecture 20: Inner product spaces. Orthogonal sets. Norm The notion of norm generalizes the notion of length of a vector in R n. Definition. Let V be a vector space. A function α
MATH 304 Linear Algebra Lecture 20: Inner product spaces. Orthogonal sets. Norm The notion of norm generalizes the notion of length of a vector in R n. Definition. Let V be a vector space. A function α
Fluid Mechanics: Static s Kinematics Dynamics Fluid
 Fluid Mechanics: Fluid mechanics may be defined as that branch of engineering science that deals with the behavior of fluid under the condition of rest and motion Fluid mechanics may be divided into three
Fluid Mechanics: Fluid mechanics may be defined as that branch of engineering science that deals with the behavior of fluid under the condition of rest and motion Fluid mechanics may be divided into three
Kristine L. Bell and Harry L. Van Trees. Center of Excellence in C 3 I George Mason University Fairfax, VA 22030-4444, USA [email protected], hlv@gmu.
 POSERIOR CRAMÉR-RAO BOUND FOR RACKING ARGE BEARING Kristine L. Bell and Harry L. Van rees Center of Excellence in C 3 I George Mason University Fairfax, VA 22030-4444, USA [email protected], [email protected] ABSRAC
POSERIOR CRAMÉR-RAO BOUND FOR RACKING ARGE BEARING Kristine L. Bell and Harry L. Van rees Center of Excellence in C 3 I George Mason University Fairfax, VA 22030-4444, USA [email protected], [email protected] ABSRAC
Group Theory and Chemistry
 Group Theory and Chemistry Outline: Raman and infra-red spectroscopy Symmetry operations Point Groups and Schoenflies symbols Function space and matrix representation Reducible and irreducible representation
Group Theory and Chemistry Outline: Raman and infra-red spectroscopy Symmetry operations Point Groups and Schoenflies symbols Function space and matrix representation Reducible and irreducible representation
Numerical Methods for Differential Equations
 Numerical Methods for Differential Equations Course objectives and preliminaries Gustaf Söderlind and Carmen Arévalo Numerical Analysis, Lund University Textbooks: A First Course in the Numerical Analysis
Numerical Methods for Differential Equations Course objectives and preliminaries Gustaf Söderlind and Carmen Arévalo Numerical Analysis, Lund University Textbooks: A First Course in the Numerical Analysis
6.0 RELIABILITY ALLOCATION
 6.0 RELIABILITY ALLOCATION Reliability Allocation deals with the setting of reliability goals for individual subsystems such that a specified reliability goal is met and the hardware and software subsystem
6.0 RELIABILITY ALLOCATION Reliability Allocation deals with the setting of reliability goals for individual subsystems such that a specified reliability goal is met and the hardware and software subsystem
jorge s. marques image processing
 image processing images images: what are they? what is shown in this image? What is this? what is an image images describe the evolution of physical variables (intensity, color, reflectance, condutivity)
image processing images images: what are they? what is shown in this image? What is this? what is an image images describe the evolution of physical variables (intensity, color, reflectance, condutivity)
Inner product. Definition of inner product
 Math 20F Linear Algebra Lecture 25 1 Inner product Review: Definition of inner product. Slide 1 Norm and distance. Orthogonal vectors. Orthogonal complement. Orthogonal basis. Definition of inner product
Math 20F Linear Algebra Lecture 25 1 Inner product Review: Definition of inner product. Slide 1 Norm and distance. Orthogonal vectors. Orthogonal complement. Orthogonal basis. Definition of inner product
animation animation shape specification as a function of time
 animation animation shape specification as a function of time animation representation many ways to represent changes with time intent artistic motion physically-plausible motion efficiency control typically
animation animation shape specification as a function of time animation representation many ways to represent changes with time intent artistic motion physically-plausible motion efficiency control typically
Section 5.0 : Horn Physics. By Martin J. King, 6/29/08 Copyright 2008 by Martin J. King. All Rights Reserved.
 Section 5. : Horn Physics Section 5. : Horn Physics By Martin J. King, 6/29/8 Copyright 28 by Martin J. King. All Rights Reserved. Before discussing the design of a horn loaded loudspeaker system, it is
Section 5. : Horn Physics Section 5. : Horn Physics By Martin J. King, 6/29/8 Copyright 28 by Martin J. King. All Rights Reserved. Before discussing the design of a horn loaded loudspeaker system, it is
Limits and Continuity
 Math 20C Multivariable Calculus Lecture Limits and Continuity Slide Review of Limit. Side limits and squeeze theorem. Continuous functions of 2,3 variables. Review: Limits Slide 2 Definition Given a function
Math 20C Multivariable Calculus Lecture Limits and Continuity Slide Review of Limit. Side limits and squeeze theorem. Continuous functions of 2,3 variables. Review: Limits Slide 2 Definition Given a function
Physics 235 Chapter 1. Chapter 1 Matrices, Vectors, and Vector Calculus
 Chapter 1 Matrices, Vectors, and Vector Calculus In this chapter, we will focus on the mathematical tools required for the course. The main concepts that will be covered are: Coordinate transformations
Chapter 1 Matrices, Vectors, and Vector Calculus In this chapter, we will focus on the mathematical tools required for the course. The main concepts that will be covered are: Coordinate transformations
Static Environment Recognition Using Omni-camera from a Moving Vehicle
 Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Dimensional Analysis
 Dimensional Analysis Mathematical Modelling Week 2 Kurt Bryan How does the escape velocity from a planet s surface depend on the planet s mass and radius? This sounds like a physics problem, but you can
Dimensional Analysis Mathematical Modelling Week 2 Kurt Bryan How does the escape velocity from a planet s surface depend on the planet s mass and radius? This sounds like a physics problem, but you can
MATH 304 Linear Algebra Lecture 18: Rank and nullity of a matrix.
 MATH 304 Linear Algebra Lecture 18: Rank and nullity of a matrix. Nullspace Let A = (a ij ) be an m n matrix. Definition. The nullspace of the matrix A, denoted N(A), is the set of all n-dimensional column
MATH 304 Linear Algebra Lecture 18: Rank and nullity of a matrix. Nullspace Let A = (a ij ) be an m n matrix. Definition. The nullspace of the matrix A, denoted N(A), is the set of all n-dimensional column
Elasticity Theory Basics
 G22.3033-002: Topics in Computer Graphics: Lecture #7 Geometric Modeling New York University Elasticity Theory Basics Lecture #7: 20 October 2003 Lecturer: Denis Zorin Scribe: Adrian Secord, Yotam Gingold
G22.3033-002: Topics in Computer Graphics: Lecture #7 Geometric Modeling New York University Elasticity Theory Basics Lecture #7: 20 October 2003 Lecturer: Denis Zorin Scribe: Adrian Secord, Yotam Gingold