Modeling and Simulation of a Three Degree of Freedom Longitudinal Aero plane System. Figure 1: Boeing 777 and example of a two engine business jet
|
|
|
- Delphia Hudson
- 8 years ago
- Views:
Transcription
1 Modeling and Simulation of a Three Degree of Freedom Longitudinal Aero plane System Figure 1: Boeing 777 and example of a two engine business jet

2

3 Nonlinear dynamic equations of motion for the longitudinal direction of aircraft

4 Nonlinear dynamic equations of motion for the longitudinal direction of aircraft The longitudinal equations of motions are considered for the aircraft model with the following assumptions V=0 Y=0 p=0 r=0 Ø=0 Ψ=0 Ixx=0 Izz=0 Ixz=0

5 Nonlinear dynamic equations of motion for the longitudinal direction of aircraft The equations after assumptions become:

6 The state vector can be shown as:

7 The control input can be shown as:

8 Methods used to stabilize our model The Linear Quadratic Regulator (LQR)controller. The Proportional Integral Deferential (PID) controller.

9 Gain Calculations (Ziegler and Nichols Method) P control k p 0.5k pu PI control k p 0.45k pu k i 0.45k pu /(0.83T u ) PID control k p 0.6k pu k i 0.6k pu /(0.5T u ) k d 0.6k pu /(0.125T u )
 PID control k p 0.6k pu k i 0.6k pu /(0.")
10 Gain Calculations (Transfer Functions) X e e- 006 s s s s s s s s s e s Z e s s s s s s s s e e s s s e s s s s s e X T s s s s e s s s s s e s Z T s s s s s s s s e T s s e s s s s s e X S e s s s s s s s s s e s Z S s s s s s s s s e S s s s e s s s s s e - 006


11 Root Locus Plots
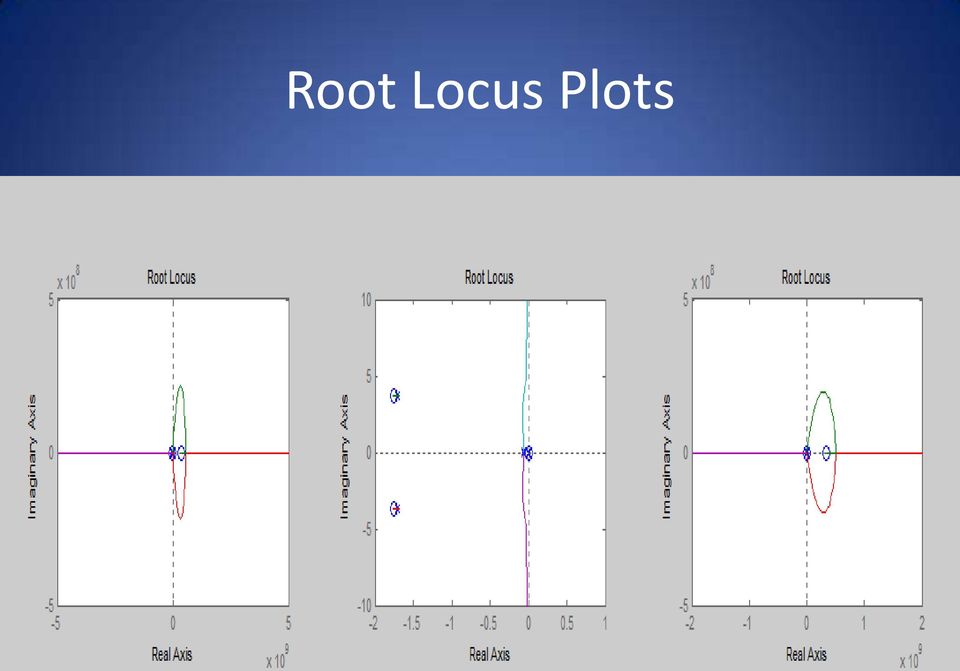

12 Root Locus Plots


13 Root Locus Plots

14 Cost Function Theory J is the energy spent by the actuators in order to regulate the system towards equilibrium The error vector (e) is defined as the difference between the actual state vector, and the commanded value λ is a Lagrange multiplier

15 Cost Function Theory If a different value of weighting is required on each of the elements of the error vector and input u: A square matrices, denoted here as Q, R (identity matrices), are used to ensure that J is non-negative for all values of e, and u, but is zero when X and Xcomm (no inputs) are equal. For each choice of Q, and R, minimization of J corresponds to a unique choice of x, using specific inputs. Essentially, the ratio between Q and R matrices represents the effort on actuators.

16 Cost Function Theory Q >> R The error is penalized, therefore the performances are maximized at the cost of an important effort on the actuators Q << R The control effort is penalized, therefore the energy used to compensate is reduced at the cost of lower performances.

17 Cost Function Theory

18 Cost Function Results RESULTS Highest performance, lowest cost, all state variables, and no inputs were used

19 RESULTS Lower performance, higher cost, all state variables, no inputs, but integration without dt

20 RESULTS Lower performance, higher cost, not all state variables, no inputs, and specific state variables were used for compromise between cost and performance

21 RESULTS High performance, higher cost, all state variables, and no inputs were used for compromise between cost and performance
22 RESULTS High performance, higher cost, all state variables, and elevator input is used only for reducing cost
23 RESULTS High performance, higher cost, all state variables, and throttle input is used only for reducing cost
24 RESULTS High performance, higher cost, all state variables, and stabilator input is used only for reducing cost
25 RESULTS High performance, highest cost, all state variables, and all inputs were used (which is our real case)
26 Cost Function Conclusion No much difference in results due to ρ that is very small. - From J1 to J8 (cost is getting higher), and from J1 to J3 (performance is getting better), but from J4 to J8 (no change in performance). -J8 is our choice for controlling all the inputs with all state variables of the system with high performance and high cost. - For future work, we can compromise between J 3and J 4 to have J9 with specific state variables (not all state variables) and also specific inputs for compromising between performance and cost.
27 OVERALL SYSTEM LAYOUT LQR Layout: Feedback linearization of the model for LQR layout
28 OVERALL SYSTEM LAYOUT Dynamic model of longitudinal aircraft for LQR layout
29 OVERALL SYSTEM LAYOUT PID Layout: Dynamic model of longitudinal aircraft for PID layout
30 OVERALL SYSTEM LAYOUT PID layout for the longitudinal aircraft model
31 RESULTS

32 RESULTS
33 RESULTS
34 RESULTS
35 RESULTS
36 RESULTS LQR Feedback Results : Altitude stabilization Range stabilization

37 Pitch angle stabilization RESULTS
38 Range stabilization RESULTS
39 THANK YOU Done By: Abbas Chamas Fadi Al Fara Bilal Jaroudi Moustafa Moustafa
19 LINEAR QUADRATIC REGULATOR
 19 LINEAR QUADRATIC REGULATOR 19.1 Introduction The simple form of loopshaping in scalar systems does not extend directly to multivariable (MIMO) plants, which are characterized by transfer matrices instead
19 LINEAR QUADRATIC REGULATOR 19.1 Introduction The simple form of loopshaping in scalar systems does not extend directly to multivariable (MIMO) plants, which are characterized by transfer matrices instead
PID, LQR and LQR-PID on a Quadcopter Platform
 PID, LQR and LQR-PID on a Quadcopter Platform Lucas M. Argentim unielargentim@fei.edu.br Willian C. Rezende uniewrezende@fei.edu.br Paulo E. Santos psantos@fei.edu.br Renato A. Aguiar preaguiar@fei.edu.br
PID, LQR and LQR-PID on a Quadcopter Platform Lucas M. Argentim unielargentim@fei.edu.br Willian C. Rezende uniewrezende@fei.edu.br Paulo E. Santos psantos@fei.edu.br Renato A. Aguiar preaguiar@fei.edu.br
A MONTE CARLO DISPERSION ANALYSIS OF A ROCKET FLIGHT SIMULATION SOFTWARE
 A MONTE CARLO DISPERSION ANALYSIS OF A ROCKET FLIGHT SIMULATION SOFTWARE F. SAGHAFI, M. KHALILIDELSHAD Department of Aerospace Engineering Sharif University of Technology E-mail: saghafi@sharif.edu Tel/Fax:
A MONTE CARLO DISPERSION ANALYSIS OF A ROCKET FLIGHT SIMULATION SOFTWARE F. SAGHAFI, M. KHALILIDELSHAD Department of Aerospace Engineering Sharif University of Technology E-mail: saghafi@sharif.edu Tel/Fax:
2. Dynamics, Control and Trajectory Following
 2. Dynamics, Control and Trajectory Following This module Flying vehicles: how do they work? Quick refresher on aircraft dynamics with reference to the magical flying space potato How I learned to stop
2. Dynamics, Control and Trajectory Following This module Flying vehicles: how do they work? Quick refresher on aircraft dynamics with reference to the magical flying space potato How I learned to stop
Indiana State Core Curriculum Standards updated 2009 Algebra I
 Indiana State Core Curriculum Standards updated 2009 Algebra I Strand Description Boardworks High School Algebra presentations Operations With Real Numbers Linear Equations and A1.1 Students simplify and
Indiana State Core Curriculum Standards updated 2009 Algebra I Strand Description Boardworks High School Algebra presentations Operations With Real Numbers Linear Equations and A1.1 Students simplify and
PID Control. Chapter 10
 Chapter PID Control Based on a survey of over eleven thousand controllers in the refining, chemicals and pulp and paper industries, 97% of regulatory controllers utilize PID feedback. Desborough Honeywell,
Chapter PID Control Based on a survey of over eleven thousand controllers in the refining, chemicals and pulp and paper industries, 97% of regulatory controllers utilize PID feedback. Desborough Honeywell,
Performance. Power Plant Output in Terms of Thrust - General - Arbitrary Drag Polar
 Performance 11. Level Flight Performance and Level flight Envelope We are interested in determining the maximum and minimum speeds that an aircraft can fly in level flight. If we do this for all altitudes,
Performance 11. Level Flight Performance and Level flight Envelope We are interested in determining the maximum and minimum speeds that an aircraft can fly in level flight. If we do this for all altitudes,
EDUMECH Mechatronic Instructional Systems. Ball on Beam System
 EDUMECH Mechatronic Instructional Systems Ball on Beam System Product of Shandor Motion Systems Written by Robert Hirsch Ph.D. 998-9 All Rights Reserved. 999 Shandor Motion Systems, Ball on Beam Instructional
EDUMECH Mechatronic Instructional Systems Ball on Beam System Product of Shandor Motion Systems Written by Robert Hirsch Ph.D. 998-9 All Rights Reserved. 999 Shandor Motion Systems, Ball on Beam Instructional
Development of Knowledge-Based Software for UAV Autopilot Design
 Development of Knowledge-Based Software for UAV Autopilot Design George Tarrant Director CLOSED LOOP SYSTEMS Health Warning Autopilot design is a technical subject. In this paper, I have tried to translate
Development of Knowledge-Based Software for UAV Autopilot Design George Tarrant Director CLOSED LOOP SYSTEMS Health Warning Autopilot design is a technical subject. In this paper, I have tried to translate
POTENTIAL OF STATE-FEEDBACK CONTROL FOR MACHINE TOOLS DRIVES
 POTENTIAL OF STATE-FEEDBACK CONTROL FOR MACHINE TOOLS DRIVES L. Novotny 1, P. Strakos 1, J. Vesely 1, A. Dietmair 2 1 Research Center of Manufacturing Technology, CTU in Prague, Czech Republic 2 SW, Universität
POTENTIAL OF STATE-FEEDBACK CONTROL FOR MACHINE TOOLS DRIVES L. Novotny 1, P. Strakos 1, J. Vesely 1, A. Dietmair 2 1 Research Center of Manufacturing Technology, CTU in Prague, Czech Republic 2 SW, Universität
Projectile motion simulator. http://www.walter-fendt.de/ph11e/projectile.htm
 More Chapter 3 Projectile motion simulator http://www.walter-fendt.de/ph11e/projectile.htm The equations of motion for constant acceleration from chapter 2 are valid separately for both motion in the x
More Chapter 3 Projectile motion simulator http://www.walter-fendt.de/ph11e/projectile.htm The equations of motion for constant acceleration from chapter 2 are valid separately for both motion in the x
Essential Mathematics for Computer Graphics fast
 John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
GRADES 7, 8, AND 9 BIG IDEAS
 Table 1: Strand A: BIG IDEAS: MATH: NUMBER Introduce perfect squares, square roots, and all applications Introduce rational numbers (positive and negative) Introduce the meaning of negative exponents for
Table 1: Strand A: BIG IDEAS: MATH: NUMBER Introduce perfect squares, square roots, and all applications Introduce rational numbers (positive and negative) Introduce the meaning of negative exponents for
Dynamics. Basilio Bona. DAUIN-Politecnico di Torino. Basilio Bona (DAUIN-Politecnico di Torino) Dynamics 2009 1 / 30
 Dynamics 2009 1 / 30") Dynamics Basilio Bona DAUIN-Politecnico di Torino 2009 Basilio Bona (DAUIN-Politecnico di Torino) Dynamics 2009 1 / 30 Dynamics - Introduction In order to determine the dynamics of a manipulator, it is
Dynamics Basilio Bona DAUIN-Politecnico di Torino 2009 Basilio Bona (DAUIN-Politecnico di Torino) Dynamics 2009 1 / 30 Dynamics - Introduction In order to determine the dynamics of a manipulator, it is
39th International Physics Olympiad - Hanoi - Vietnam - 2008. Theoretical Problem No. 3
 CHANGE OF AIR TEMPERATURE WITH ALTITUDE, ATMOSPHERIC STABILITY AND AIR POLLUTION Vertical motion of air governs many atmospheric processes, such as the formation of clouds and precipitation and the dispersal
CHANGE OF AIR TEMPERATURE WITH ALTITUDE, ATMOSPHERIC STABILITY AND AIR POLLUTION Vertical motion of air governs many atmospheric processes, such as the formation of clouds and precipitation and the dispersal
Derive 5: The Easiest... Just Got Better!
 Liverpool John Moores University, 1-15 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de Technologie Supérieure, Canada Email; mbeaudin@seg.etsmtl.ca 1. Introduction Engineering
Liverpool John Moores University, 1-15 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de Technologie Supérieure, Canada Email; mbeaudin@seg.etsmtl.ca 1. Introduction Engineering
Least-Squares Intersection of Lines
 Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
ALGEBRA 2: 4.1 Graph Quadratic Functions in Standard Form
 ALGEBRA 2: 4.1 Graph Quadratic Functions in Standard Form Goal Graph quadratic functions. VOCABULARY Quadratic function A function that can be written in the standard form y = ax 2 + bx+ c where a 0 Parabola
ALGEBRA 2: 4.1 Graph Quadratic Functions in Standard Form Goal Graph quadratic functions. VOCABULARY Quadratic function A function that can be written in the standard form y = ax 2 + bx+ c where a 0 Parabola
JUST THE MATHS UNIT NUMBER 1.8. ALGEBRA 8 (Polynomials) A.J.Hobson
 A.J.Hobson") JUST THE MATHS UNIT NUMBER 1.8 ALGEBRA 8 (Polynomials) by A.J.Hobson 1.8.1 The factor theorem 1.8.2 Application to quadratic and cubic expressions 1.8.3 Cubic equations 1.8.4 Long division of polynomials
JUST THE MATHS UNIT NUMBER 1.8 ALGEBRA 8 (Polynomials) by A.J.Hobson 1.8.1 The factor theorem 1.8.2 Application to quadratic and cubic expressions 1.8.3 Cubic equations 1.8.4 Long division of polynomials
Lecture 8 : Dynamic Stability
 Lecture 8 : Dynamic Stability Or what happens to small disturbances about a trim condition 1.0 : Dynamic Stability Static stability refers to the tendency of the aircraft to counter a disturbance. Dynamic
Lecture 8 : Dynamic Stability Or what happens to small disturbances about a trim condition 1.0 : Dynamic Stability Static stability refers to the tendency of the aircraft to counter a disturbance. Dynamic
3 Orthogonal Vectors and Matrices
 3 Orthogonal Vectors and Matrices The linear algebra portion of this course focuses on three matrix factorizations: QR factorization, singular valued decomposition (SVD), and LU factorization The first
3 Orthogonal Vectors and Matrices The linear algebra portion of this course focuses on three matrix factorizations: QR factorization, singular valued decomposition (SVD), and LU factorization The first
3.2 Sources, Sinks, Saddles, and Spirals
 3.2. Sources, Sinks, Saddles, and Spirals 6 3.2 Sources, Sinks, Saddles, and Spirals The pictures in this section show solutions to Ay 00 C By 0 C Cy D 0. These are linear equations with constant coefficients
3.2. Sources, Sinks, Saddles, and Spirals 6 3.2 Sources, Sinks, Saddles, and Spirals The pictures in this section show solutions to Ay 00 C By 0 C Cy D 0. These are linear equations with constant coefficients
Regression III: Advanced Methods
 Lecture 4: Transformations Regression III: Advanced Methods William G. Jacoby Michigan State University Goals of the lecture The Ladder of Roots and Powers Changing the shape of distributions Transforming
Lecture 4: Transformations Regression III: Advanced Methods William G. Jacoby Michigan State University Goals of the lecture The Ladder of Roots and Powers Changing the shape of distributions Transforming
Algebra I Credit Recovery
 Algebra I Credit Recovery COURSE DESCRIPTION: The purpose of this course is to allow the student to gain mastery in working with and evaluating mathematical expressions, equations, graphs, and other topics,
Algebra I Credit Recovery COURSE DESCRIPTION: The purpose of this course is to allow the student to gain mastery in working with and evaluating mathematical expressions, equations, graphs, and other topics,
ASEN 3112 - Structures. MDOF Dynamic Systems. ASEN 3112 Lecture 1 Slide 1
 19 MDOF Dynamic Systems ASEN 3112 Lecture 1 Slide 1 A Two-DOF Mass-Spring-Dashpot Dynamic System Consider the lumped-parameter, mass-spring-dashpot dynamic system shown in the Figure. It has two point
19 MDOF Dynamic Systems ASEN 3112 Lecture 1 Slide 1 A Two-DOF Mass-Spring-Dashpot Dynamic System Consider the lumped-parameter, mass-spring-dashpot dynamic system shown in the Figure. It has two point
ROUTH S STABILITY CRITERION
 ECE 680 Modern Automatic Control Routh s Stability Criterion June 13, 2007 1 ROUTH S STABILITY CRITERION Consider a closed-loop transfer function H(s) = b 0s m + b 1 s m 1 + + b m 1 s + b m a 0 s n + s
ECE 680 Modern Automatic Control Routh s Stability Criterion June 13, 2007 1 ROUTH S STABILITY CRITERION Consider a closed-loop transfer function H(s) = b 0s m + b 1 s m 1 + + b m 1 s + b m a 0 s n + s
Manufacturing Equipment Modeling
 QUESTION 1 For a linear axis actuated by an electric motor complete the following: a. Derive a differential equation for the linear axis velocity assuming viscous friction acts on the DC motor shaft, leadscrew,
QUESTION 1 For a linear axis actuated by an electric motor complete the following: a. Derive a differential equation for the linear axis velocity assuming viscous friction acts on the DC motor shaft, leadscrew,
Algebra 1 Course Title
 Algebra 1 Course Title Course- wide 1. What patterns and methods are being used? Course- wide 1. Students will be adept at solving and graphing linear and quadratic equations 2. Students will be adept
Algebra 1 Course Title Course- wide 1. What patterns and methods are being used? Course- wide 1. Students will be adept at solving and graphing linear and quadratic equations 2. Students will be adept
Question 1a of 14 ( 2 Identifying the roots of a polynomial and their importance 91008 )
") Quiz: Factoring by Graphing Question 1a of 14 ( 2 Identifying the roots of a polynomial and their importance 91008 ) (x-3)(x-6), (x-6)(x-3), (1x-3)(1x-6), (1x-6)(1x-3), (x-3)*(x-6), (x-6)*(x-3), (1x- 3)*(1x-6),
Quiz: Factoring by Graphing Question 1a of 14 ( 2 Identifying the roots of a polynomial and their importance 91008 ) (x-3)(x-6), (x-6)(x-3), (1x-3)(1x-6), (1x-6)(1x-3), (x-3)*(x-6), (x-6)*(x-3), (1x- 3)*(1x-6),
SECOND DERIVATIVE TEST FOR CONSTRAINED EXTREMA
 SECOND DERIVATIVE TEST FOR CONSTRAINED EXTREMA This handout presents the second derivative test for a local extrema of a Lagrange multiplier problem. The Section 1 presents a geometric motivation for the
SECOND DERIVATIVE TEST FOR CONSTRAINED EXTREMA This handout presents the second derivative test for a local extrema of a Lagrange multiplier problem. The Section 1 presents a geometric motivation for the
Macroeconomic Effects of Financial Shocks Online Appendix
 Macroeconomic Effects of Financial Shocks Online Appendix By Urban Jermann and Vincenzo Quadrini Data sources Financial data is from the Flow of Funds Accounts of the Federal Reserve Board. We report the
Macroeconomic Effects of Financial Shocks Online Appendix By Urban Jermann and Vincenzo Quadrini Data sources Financial data is from the Flow of Funds Accounts of the Federal Reserve Board. We report the
Method To Solve Linear, Polynomial, or Absolute Value Inequalities:
 Solving Inequalities An inequality is the result of replacing the = sign in an equation with ,, or. For example, 3x 2 < 7 is a linear inequality. We call it linear because if the < were replaced with
Solving Inequalities An inequality is the result of replacing the = sign in an equation with ,, or. For example, 3x 2 < 7 is a linear inequality. We call it linear because if the < were replaced with
Algebra and Geometry Review (61 topics, no due date)
") Course Name: Math 112 Credit Exam LA Tech University Course Code: ALEKS Course: Trigonometry Instructor: Course Dates: Course Content: 159 topics Algebra and Geometry Review (61 topics, no due date) Properties
Course Name: Math 112 Credit Exam LA Tech University Course Code: ALEKS Course: Trigonometry Instructor: Course Dates: Course Content: 159 topics Algebra and Geometry Review (61 topics, no due date) Properties
The Fourth International DERIVE-TI92/89 Conference Liverpool, U.K., 12-15 July 2000. Derive 5: The Easiest... Just Got Better!
 The Fourth International DERIVE-TI9/89 Conference Liverpool, U.K., -5 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de technologie supérieure 00, rue Notre-Dame Ouest Montréal
The Fourth International DERIVE-TI9/89 Conference Liverpool, U.K., -5 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de technologie supérieure 00, rue Notre-Dame Ouest Montréal
Recall the basic property of the transpose (for any A): v A t Aw = v w, v, w R n.
: v A t Aw = v w, v, w R n.") ORTHOGONAL MATRICES Informally, an orthogonal n n matrix is the n-dimensional analogue of the rotation matrices R θ in R 2. When does a linear transformation of R 3 (or R n ) deserve to be called a rotation?
ORTHOGONAL MATRICES Informally, an orthogonal n n matrix is the n-dimensional analogue of the rotation matrices R θ in R 2. When does a linear transformation of R 3 (or R n ) deserve to be called a rotation?
Figure 1. The Ball and Beam System.
 BALL AND BEAM : Basics Peter Wellstead: control systems principles.co.uk ABSTRACT: This is one of a series of white papers on systems modelling, analysis and control, prepared by Control Systems Principles.co.uk
BALL AND BEAM : Basics Peter Wellstead: control systems principles.co.uk ABSTRACT: This is one of a series of white papers on systems modelling, analysis and control, prepared by Control Systems Principles.co.uk
Performance. 13. Climbing Flight
 Performance 13. Climbing Flight In order to increase altitude, we must add energy to the aircraft. We can do this by increasing the thrust or power available. If we do that, one of three things can happen:
Performance 13. Climbing Flight In order to increase altitude, we must add energy to the aircraft. We can do this by increasing the thrust or power available. If we do that, one of three things can happen:
Group Theory and Chemistry
 Group Theory and Chemistry Outline: Raman and infra-red spectroscopy Symmetry operations Point Groups and Schoenflies symbols Function space and matrix representation Reducible and irreducible representation
Group Theory and Chemistry Outline: Raman and infra-red spectroscopy Symmetry operations Point Groups and Schoenflies symbols Function space and matrix representation Reducible and irreducible representation
To Be or Not To Be a Linear Equation: That Is the Question
 To Be or Not To Be a Linear Equation: That Is the Question Linear Equation in Two Variables A linear equation in two variables is an equation that can be written in the form A + B C where A and B are not
To Be or Not To Be a Linear Equation: That Is the Question Linear Equation in Two Variables A linear equation in two variables is an equation that can be written in the form A + B C where A and B are not
Mathematics Online Instructional Materials Correlation to the 2009 Algebra I Standards of Learning and Curriculum Framework
 Provider York County School Division Course Syllabus URL http://yorkcountyschools.org/virtuallearning/coursecatalog.aspx Course Title Algebra I AB Last Updated 2010 - A.1 The student will represent verbal
Provider York County School Division Course Syllabus URL http://yorkcountyschools.org/virtuallearning/coursecatalog.aspx Course Title Algebra I AB Last Updated 2010 - A.1 The student will represent verbal
(a) We have x = 3 + 2t, y = 2 t, z = 6 so solving for t we get the symmetric equations. x 3 2. = 2 y, z = 6. t 2 2t + 1 = 0,
 We have x = 3 + 2t, y = 2 t, z = 6 so solving for t we get the symmetric equations. x 3 2. = 2 y, z = 6. t 2 2t + 1 = 0,") Name: Solutions to Practice Final. Consider the line r(t) = 3 + t, t, 6. (a) Find symmetric equations for this line. (b) Find the point where the first line r(t) intersects the surface z = x + y. (a) We
Name: Solutions to Practice Final. Consider the line r(t) = 3 + t, t, 6. (a) Find symmetric equations for this line. (b) Find the point where the first line r(t) intersects the surface z = x + y. (a) We
QNET Experiment #06: HVAC Proportional- Integral (PI) Temperature Control Heating, Ventilation, and Air Conditioning Trainer (HVACT)
 Temperature Control Heating, Ventilation, and Air Conditioning Trainer (HVACT)") Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #06: HVAC Proportional- Integral (PI) Temperature Control Heating, Ventilation, and Air Conditioning Trainer (HVACT) Student Manual Table of Contents
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #06: HVAC Proportional- Integral (PI) Temperature Control Heating, Ventilation, and Air Conditioning Trainer (HVACT) Student Manual Table of Contents
Introduction to Matrix Algebra
 Psychology 7291: Multivariate Statistics (Carey) 8/27/98 Matrix Algebra - 1 Introduction to Matrix Algebra Definitions: A matrix is a collection of numbers ordered by rows and columns. It is customary
Psychology 7291: Multivariate Statistics (Carey) 8/27/98 Matrix Algebra - 1 Introduction to Matrix Algebra Definitions: A matrix is a collection of numbers ordered by rows and columns. It is customary
Dynamic Stability. Chapter 5. 5.1 Mathematical Background. 5.1.1 An Introductory Example
 Chapter 5 Dynamic Stability These notes provide a brief background for the response of linear systems, with application to the equations of motion for a flight vehicle. The description is meant to provide
Chapter 5 Dynamic Stability These notes provide a brief background for the response of linear systems, with application to the equations of motion for a flight vehicle. The description is meant to provide
Fitting Subject-specific Curves to Grouped Longitudinal Data
 Fitting Subject-specific Curves to Grouped Longitudinal Data Djeundje, Viani Heriot-Watt University, Department of Actuarial Mathematics & Statistics Edinburgh, EH14 4AS, UK E-mail: vad5@hw.ac.uk Currie,
Fitting Subject-specific Curves to Grouped Longitudinal Data Djeundje, Viani Heriot-Watt University, Department of Actuarial Mathematics & Statistics Edinburgh, EH14 4AS, UK E-mail: vad5@hw.ac.uk Currie,
[1] Diagonal factorization
![[1] Diagonal factorization](/thumbs/40/21671034.jpg "[1] Diagonal factorization") 8.03 LA.6: Diagonalization and Orthogonal Matrices [ Diagonal factorization [2 Solving systems of first order differential equations [3 Symmetric and Orthonormal Matrices [ Diagonal factorization Recall:
8.03 LA.6: Diagonalization and Orthogonal Matrices [ Diagonal factorization [2 Solving systems of first order differential equations [3 Symmetric and Orthonormal Matrices [ Diagonal factorization Recall:
Paper 2 Revision. (compiled in light of the contents of paper1) Higher Tier Edexcel
 Higher Tier Edexcel") Paper 2 Revision (compiled in light of the contents of paper1) Higher Tier Edexcel 1 Topic Areas 1. Data Handling 2. Number 3. Shape, Space and Measure 4. Algebra 2 Data Handling Averages Two-way table
Paper 2 Revision (compiled in light of the contents of paper1) Higher Tier Edexcel 1 Topic Areas 1. Data Handling 2. Number 3. Shape, Space and Measure 4. Algebra 2 Data Handling Averages Two-way table
G(s) = Y (s)/u(s) In this representation, the output is always the Transfer function times the input. Y (s) = G(s)U(s).
 = Y (s)/u(s) In this representation, the output is always the Transfer function times the input. Y (s) = G(s)U(s).") Transfer Functions The transfer function of a linear system is the ratio of the Laplace Transform of the output to the Laplace Transform of the input, i.e., Y (s)/u(s). Denoting this ratio by G(s), i.e.,
Transfer Functions The transfer function of a linear system is the ratio of the Laplace Transform of the output to the Laplace Transform of the input, i.e., Y (s)/u(s). Denoting this ratio by G(s), i.e.,
First, we show how to use known design specifications to determine filter order and 3dB cut-off
 Butterworth Low-Pass Filters In this article, we describe the commonly-used, n th -order Butterworth low-pass filter. First, we show how to use known design specifications to determine filter order and
Butterworth Low-Pass Filters In this article, we describe the commonly-used, n th -order Butterworth low-pass filter. First, we show how to use known design specifications to determine filter order and
Project: OUTFIELD FENCES
 1 Project: OUTFIELD FENCES DESCRIPTION: In this project you will work with the equations of projectile motion and use mathematical models to analyze a design problem. Two softball fields in Rolla, Missouri
1 Project: OUTFIELD FENCES DESCRIPTION: In this project you will work with the equations of projectile motion and use mathematical models to analyze a design problem. Two softball fields in Rolla, Missouri
SAMPLE CHAPTERS UNESCO EOLSS PID CONTROL. Araki M. Kyoto University, Japan
 PID CONTROL Araki M. Kyoto University, Japan Keywords: feedback control, proportional, integral, derivative, reaction curve, process with self-regulation, integrating process, process model, steady-state
PID CONTROL Araki M. Kyoto University, Japan Keywords: feedback control, proportional, integral, derivative, reaction curve, process with self-regulation, integrating process, process model, steady-state
Spacecraft Dynamics and Control. An Introduction
 Brochure More information from http://www.researchandmarkets.com/reports/2328050/ Spacecraft Dynamics and Control. An Introduction Description: Provides the basics of spacecraft orbital dynamics plus attitude
Brochure More information from http://www.researchandmarkets.com/reports/2328050/ Spacecraft Dynamics and Control. An Introduction Description: Provides the basics of spacecraft orbital dynamics plus attitude
Definition 8.1 Two inequalities are equivalent if they have the same solution set. Add or Subtract the same value on both sides of the inequality.
 8 Inequalities Concepts: Equivalent Inequalities Linear and Nonlinear Inequalities Absolute Value Inequalities (Sections 4.6 and 1.1) 8.1 Equivalent Inequalities Definition 8.1 Two inequalities are equivalent
8 Inequalities Concepts: Equivalent Inequalities Linear and Nonlinear Inequalities Absolute Value Inequalities (Sections 4.6 and 1.1) 8.1 Equivalent Inequalities Definition 8.1 Two inequalities are equivalent
Introduction to Macroeconomics TOPIC 2: The Goods Market
 TOPIC 2: The Goods Market Annaïg Morin CBS - Department of Economics August 2013 Goods market Road map: 1. Demand for goods 1.1. Components 1.1.1. Consumption 1.1.2. Investment 1.1.3. Government spending
TOPIC 2: The Goods Market Annaïg Morin CBS - Department of Economics August 2013 Goods market Road map: 1. Demand for goods 1.1. Components 1.1.1. Consumption 1.1.2. Investment 1.1.3. Government spending
Thnkwell s Homeschool Precalculus Course Lesson Plan: 36 weeks
 Thnkwell s Homeschool Precalculus Course Lesson Plan: 36 weeks Welcome to Thinkwell s Homeschool Precalculus! We re thrilled that you ve decided to make us part of your homeschool curriculum. This lesson
Thnkwell s Homeschool Precalculus Course Lesson Plan: 36 weeks Welcome to Thinkwell s Homeschool Precalculus! We re thrilled that you ve decided to make us part of your homeschool curriculum. This lesson
Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist
 Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist MHER GRIGORIAN, TAREK SOBH Department of Computer Science and Engineering, U. of Bridgeport, USA ABSTRACT Robot
Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist MHER GRIGORIAN, TAREK SOBH Department of Computer Science and Engineering, U. of Bridgeport, USA ABSTRACT Robot
State-Space Feedback Control for Elastic Distributed Storage in a Cloud Environment
 State-Space Feedback Control for Elastic Distributed Storage in a Cloud Environment M. Amir Moulavi Ahmad Al-Shishtawy Vladimir Vlassov KTH Royal Institute of Technology, Stockholm, Sweden ICAS 2012, March
State-Space Feedback Control for Elastic Distributed Storage in a Cloud Environment M. Amir Moulavi Ahmad Al-Shishtawy Vladimir Vlassov KTH Royal Institute of Technology, Stockholm, Sweden ICAS 2012, March
PCHS ALGEBRA PLACEMENT TEST
 MATHEMATICS Students must pass all math courses with a C or better to advance to the next math level. Only classes passed with a C or better will count towards meeting college entrance requirements. If
MATHEMATICS Students must pass all math courses with a C or better to advance to the next math level. Only classes passed with a C or better will count towards meeting college entrance requirements. If
MATH 551 - APPLIED MATRIX THEORY
 MATH 55 - APPLIED MATRIX THEORY FINAL TEST: SAMPLE with SOLUTIONS (25 points NAME: PROBLEM (3 points A web of 5 pages is described by a directed graph whose matrix is given by A Do the following ( points
MATH 55 - APPLIED MATRIX THEORY FINAL TEST: SAMPLE with SOLUTIONS (25 points NAME: PROBLEM (3 points A web of 5 pages is described by a directed graph whose matrix is given by A Do the following ( points
1 Lecture 3: Operators in Quantum Mechanics
 1 Lecture 3: Operators in Quantum Mechanics 1.1 Basic notions of operator algebra. In the previous lectures we have met operators: ˆx and ˆp = i h they are called fundamental operators. Many operators
1 Lecture 3: Operators in Quantum Mechanics 1.1 Basic notions of operator algebra. In the previous lectures we have met operators: ˆx and ˆp = i h they are called fundamental operators. Many operators
EECE 460 : Control System Design
 EECE 460 : Control System Design PID Controller Design and Tuning Guy A. Dumont UBC EECE January 2012 Guy A. Dumont (UBC EECE) EECE 460 PID Tuning January 2012 1 / 37 Contents 1 Introduction 2 Control
EECE 460 : Control System Design PID Controller Design and Tuning Guy A. Dumont UBC EECE January 2012 Guy A. Dumont (UBC EECE) EECE 460 PID Tuning January 2012 1 / 37 Contents 1 Introduction 2 Control
1 Portfolio mean and variance
 Copyright c 2005 by Karl Sigman Portfolio mean and variance Here we study the performance of a one-period investment X 0 > 0 (dollars) shared among several different assets. Our criterion for measuring
Copyright c 2005 by Karl Sigman Portfolio mean and variance Here we study the performance of a one-period investment X 0 > 0 (dollars) shared among several different assets. Our criterion for measuring
APP Aircraft Performance Program Demo Notes Using Cessna 172 as an Example
 APP Aircraft Performance Program Demo Notes Using Cessna 172 as an Example Prepared by DARcorporation 1. Program Layout & Organization APP Consists of 8 Modules, 5 Input Modules and 2 Calculation Modules.
APP Aircraft Performance Program Demo Notes Using Cessna 172 as an Example Prepared by DARcorporation 1. Program Layout & Organization APP Consists of 8 Modules, 5 Input Modules and 2 Calculation Modules.
POLYNOMIAL AND MULTIPLE REGRESSION. Polynomial regression used to fit nonlinear (e.g. curvilinear) data into a least squares linear regression model.
 data into a least squares linear regression model.") Polynomial Regression POLYNOMIAL AND MULTIPLE REGRESSION Polynomial regression used to fit nonlinear (e.g. curvilinear) data into a least squares linear regression model. It is a form of linear regression
Polynomial Regression POLYNOMIAL AND MULTIPLE REGRESSION Polynomial regression used to fit nonlinear (e.g. curvilinear) data into a least squares linear regression model. It is a form of linear regression
Common Core Unit Summary Grades 6 to 8
 Common Core Unit Summary Grades 6 to 8 Grade 8: Unit 1: Congruence and Similarity- 8G1-8G5 rotations reflections and translations,( RRT=congruence) understand congruence of 2 d figures after RRT Dilations
Common Core Unit Summary Grades 6 to 8 Grade 8: Unit 1: Congruence and Similarity- 8G1-8G5 rotations reflections and translations,( RRT=congruence) understand congruence of 2 d figures after RRT Dilations
DATA ANALYSIS II. Matrix Algorithms
 DATA ANALYSIS II Matrix Algorithms Similarity Matrix Given a dataset D = {x i }, i=1,..,n consisting of n points in R d, let A denote the n n symmetric similarity matrix between the points, given as where
DATA ANALYSIS II Matrix Algorithms Similarity Matrix Given a dataset D = {x i }, i=1,..,n consisting of n points in R d, let A denote the n n symmetric similarity matrix between the points, given as where
Motion Control of 3 Degree-of-Freedom Direct-Drive Robot. Rutchanee Gullayanon
 Motion Control of 3 Degree-of-Freedom Direct-Drive Robot A Thesis Presented to The Academic Faculty by Rutchanee Gullayanon In Partial Fulfillment of the Requirements for the Degree Master of Engineering
Motion Control of 3 Degree-of-Freedom Direct-Drive Robot A Thesis Presented to The Academic Faculty by Rutchanee Gullayanon In Partial Fulfillment of the Requirements for the Degree Master of Engineering
9 Multiplication of Vectors: The Scalar or Dot Product
 Arkansas Tech University MATH 934: Calculus III Dr. Marcel B Finan 9 Multiplication of Vectors: The Scalar or Dot Product Up to this point we have defined what vectors are and discussed basic notation
Arkansas Tech University MATH 934: Calculus III Dr. Marcel B Finan 9 Multiplication of Vectors: The Scalar or Dot Product Up to this point we have defined what vectors are and discussed basic notation
ANTI LOCK BRAKING SYSTEM MODELLING AND DEVELOPMENT
 ANTI LOCK BRAKING SYSTEM MODELLING AND DEVELOPMENT Aldi Manikanth ME10B004 A Manoj Kumar ME10B006 C Vijay Chauhan ME10B010 Nachiket Dongre ME10B013 Lithas ME10B020 Rajesh Kumar Meena ME10B030 Varada Karthik
ANTI LOCK BRAKING SYSTEM MODELLING AND DEVELOPMENT Aldi Manikanth ME10B004 A Manoj Kumar ME10B006 C Vijay Chauhan ME10B010 Nachiket Dongre ME10B013 Lithas ME10B020 Rajesh Kumar Meena ME10B030 Varada Karthik
Leadership in Animal Group Motion: A Bifurcation Analysis
 Proc. 17th Int. Symp. on Mathematical Theory of Networks and Systems, 006 Leadership in Animal Group Motion: A Bifurcation Analysis Benjamin Nabet, Naomi E. Leonard, Iain D. Couzin and Simon A. Levin Abstract
Proc. 17th Int. Symp. on Mathematical Theory of Networks and Systems, 006 Leadership in Animal Group Motion: A Bifurcation Analysis Benjamin Nabet, Naomi E. Leonard, Iain D. Couzin and Simon A. Levin Abstract
APPLICATIONS. are symmetric, but. are not.
 CHAPTER III APPLICATIONS Real Symmetric Matrices The most common matrices we meet in applications are symmetric, that is, they are square matrices which are equal to their transposes In symbols, A t =
CHAPTER III APPLICATIONS Real Symmetric Matrices The most common matrices we meet in applications are symmetric, that is, they are square matrices which are equal to their transposes In symbols, A t =
Mechanics lecture 7 Moment of a force, torque, equilibrium of a body
 G.1 EE1.el3 (EEE1023): Electronics III Mechanics lecture 7 Moment of a force, torque, equilibrium of a body Dr Philip Jackson http://www.ee.surrey.ac.uk/teaching/courses/ee1.el3/ G.2 Moments, torque and
G.1 EE1.el3 (EEE1023): Electronics III Mechanics lecture 7 Moment of a force, torque, equilibrium of a body Dr Philip Jackson http://www.ee.surrey.ac.uk/teaching/courses/ee1.el3/ G.2 Moments, torque and
Chapter 19. General Matrices. An n m matrix is an array. a 11 a 12 a 1m a 21 a 22 a 2m A = a n1 a n2 a nm. The matrix A has n row vectors
 Chapter 9. General Matrices An n m matrix is an array a a a m a a a m... = [a ij]. a n a n a nm The matrix A has n row vectors and m column vectors row i (A) = [a i, a i,..., a im ] R m a j a j a nj col
Chapter 9. General Matrices An n m matrix is an array a a a m a a a m... = [a ij]. a n a n a nm The matrix A has n row vectors and m column vectors row i (A) = [a i, a i,..., a im ] R m a j a j a nj col
A simple method to determine control valve performance and its impacts on control loop performance
 A simple method to determine control valve performance and its impacts on control loop performance Keywords Michel Ruel p.eng., Top Control Inc. Process optimization, tuning, stiction, hysteresis, backlash,
A simple method to determine control valve performance and its impacts on control loop performance Keywords Michel Ruel p.eng., Top Control Inc. Process optimization, tuning, stiction, hysteresis, backlash,
Polynomial Degree and Finite Differences
 CONDENSED LESSON 7.1 Polynomial Degree and Finite Differences In this lesson you will learn the terminology associated with polynomials use the finite differences method to determine the degree of a polynomial
CONDENSED LESSON 7.1 Polynomial Degree and Finite Differences In this lesson you will learn the terminology associated with polynomials use the finite differences method to determine the degree of a polynomial
EE 402 RECITATION #13 REPORT
 MIDDLE EAST TECHNICAL UNIVERSITY EE 402 RECITATION #13 REPORT LEAD-LAG COMPENSATOR DESIGN F. Kağan İPEK Utku KIRAN Ç. Berkan Şahin 5/16/2013 Contents INTRODUCTION... 3 MODELLING... 3 OBTAINING PTF of OPEN
MIDDLE EAST TECHNICAL UNIVERSITY EE 402 RECITATION #13 REPORT LEAD-LAG COMPENSATOR DESIGN F. Kağan İPEK Utku KIRAN Ç. Berkan Şahin 5/16/2013 Contents INTRODUCTION... 3 MODELLING... 3 OBTAINING PTF of OPEN
System Modeling and Control for Mechanical Engineers
 Session 1655 System Modeling and Control for Mechanical Engineers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: jackh@gvsu.edu Abstract
Session 1655 System Modeling and Control for Mechanical Engineers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: jackh@gvsu.edu Abstract
Derivation of the Laplace equation
 Derivation of the Laplace equation Svein M. Skjæveland October 19, 2012 Abstract This note presents a derivation of the Laplace equation which gives the relationship between capillary pressure, surface
Derivation of the Laplace equation Svein M. Skjæveland October 19, 2012 Abstract This note presents a derivation of the Laplace equation which gives the relationship between capillary pressure, surface
WEIGHTLESS WONDER Reduced Gravity Flight
 WEIGHTLESS WONDER Reduced Gravity Flight Instructional Objectives Students will use trigonometric ratios to find vertical and horizontal components of a velocity vector; derive a formula describing height
WEIGHTLESS WONDER Reduced Gravity Flight Instructional Objectives Students will use trigonometric ratios to find vertical and horizontal components of a velocity vector; derive a formula describing height
The aerodynamic center
 The aerodynamic center In this chapter, we re going to focus on the aerodynamic center, and its effect on the moment coefficient C m. 1 Force and moment coefficients 1.1 Aerodynamic forces Let s investigate
The aerodynamic center In this chapter, we re going to focus on the aerodynamic center, and its effect on the moment coefficient C m. 1 Force and moment coefficients 1.1 Aerodynamic forces Let s investigate
The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w
![The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w](/thumbs/25/5134815.jpg "The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w") Chapter 4 Vehicle Dynamics 4.. Introduction In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration
Chapter 4 Vehicle Dynamics 4.. Introduction In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration
Data Review and Analysis Program (DRAP) Flight Data Visualization Program for Enhancement of FOQA
 Flight Data Visualization Program for Enhancement of FOQA") 86 Data Review and Analysis Program (DRAP) Flight Data Visualization Program for Enhancement of FOQA Koji MURAOKA and Noriaki OKADA, Flight Systems Research Center, E-mail: muraoka@nal.go.jp Keywords:
86 Data Review and Analysis Program (DRAP) Flight Data Visualization Program for Enhancement of FOQA Koji MURAOKA and Noriaki OKADA, Flight Systems Research Center, E-mail: muraoka@nal.go.jp Keywords:
Sequence of Mathematics Courses
 Sequence of ematics Courses Where do I begin? Associates Degree and Non-transferable Courses (For math course below pre-algebra, see the Learning Skills section of the catalog) MATH M09 PRE-ALGEBRA 3 UNITS
Sequence of ematics Courses Where do I begin? Associates Degree and Non-transferable Courses (For math course below pre-algebra, see the Learning Skills section of the catalog) MATH M09 PRE-ALGEBRA 3 UNITS
Course Outlines. 1. Name of the Course: Algebra I (Standard, College Prep, Honors) Course Description: ALGEBRA I STANDARD (1 Credit)
 Course Description: ALGEBRA I STANDARD (1 Credit)") Course Outlines 1. Name of the Course: Algebra I (Standard, College Prep, Honors) Course Description: ALGEBRA I STANDARD (1 Credit) This course will cover Algebra I concepts such as algebra as a language,
Course Outlines 1. Name of the Course: Algebra I (Standard, College Prep, Honors) Course Description: ALGEBRA I STANDARD (1 Credit) This course will cover Algebra I concepts such as algebra as a language,
Orthogonal Projections
 Orthogonal Projections and Reflections (with exercises) by D. Klain Version.. Corrections and comments are welcome! Orthogonal Projections Let X,..., X k be a family of linearly independent (column) vectors
Orthogonal Projections and Reflections (with exercises) by D. Klain Version.. Corrections and comments are welcome! Orthogonal Projections Let X,..., X k be a family of linearly independent (column) vectors
MAC 1114. Learning Objectives. Module 10. Polar Form of Complex Numbers. There are two major topics in this module:
 MAC 1114 Module 10 Polar Form of Complex Numbers Learning Objectives Upon completing this module, you should be able to: 1. Identify and simplify imaginary and complex numbers. 2. Add and subtract complex
MAC 1114 Module 10 Polar Form of Complex Numbers Learning Objectives Upon completing this module, you should be able to: 1. Identify and simplify imaginary and complex numbers. 2. Add and subtract complex
Ziegler-Nichols-Based Intelligent Fuzzy PID Controller Design for Antenna Tracking System
 Ziegler-Nichols-Based Intelligent Fuzzy PID Controller Design for Antenna Tracking System Po-Kuang Chang, Jium-Ming Lin Member, IAENG, and Kun-Tai Cho Abstract This research is to augment the intelligent
Ziegler-Nichols-Based Intelligent Fuzzy PID Controller Design for Antenna Tracking System Po-Kuang Chang, Jium-Ming Lin Member, IAENG, and Kun-Tai Cho Abstract This research is to augment the intelligent
Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm
 1 Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm Hani Mehrpouyan, Student Member, IEEE, Department of Electrical and Computer Engineering Queen s University, Kingston, Ontario,
1 Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm Hani Mehrpouyan, Student Member, IEEE, Department of Electrical and Computer Engineering Queen s University, Kingston, Ontario,
Lecture 3: Linear methods for classification
 Lecture 3: Linear methods for classification Rafael A. Irizarry and Hector Corrada Bravo February, 2010 Today we describe four specific algorithms useful for classification problems: linear regression,
Lecture 3: Linear methods for classification Rafael A. Irizarry and Hector Corrada Bravo February, 2010 Today we describe four specific algorithms useful for classification problems: linear regression,
Algebra Unpacked Content For the new Common Core standards that will be effective in all North Carolina schools in the 2012-13 school year.
 This document is designed to help North Carolina educators teach the Common Core (Standard Course of Study). NCDPI staff are continually updating and improving these tools to better serve teachers. Algebra
This document is designed to help North Carolina educators teach the Common Core (Standard Course of Study). NCDPI staff are continually updating and improving these tools to better serve teachers. Algebra
1.3. DOT PRODUCT 19. 6. If θ is the angle (between 0 and π) between two non-zero vectors u and v,
 between two non-zero vectors u and v,") 1.3. DOT PRODUCT 19 1.3 Dot Product 1.3.1 Definitions and Properties The dot product is the first way to multiply two vectors. The definition we will give below may appear arbitrary. But it is not. It
1.3. DOT PRODUCT 19 1.3 Dot Product 1.3.1 Definitions and Properties The dot product is the first way to multiply two vectors. The definition we will give below may appear arbitrary. But it is not. It
CORRECTION OF DYNAMIC WHEEL FORCES MEASURED ON ROAD SIMULATORS
 Pages 1 to 35 CORRECTION OF DYNAMIC WHEEL FORCES MEASURED ON ROAD SIMULATORS Bohdan T. Kulakowski and Zhijie Wang Pennsylvania Transportation Institute The Pennsylvania State University University Park,
Pages 1 to 35 CORRECTION OF DYNAMIC WHEEL FORCES MEASURED ON ROAD SIMULATORS Bohdan T. Kulakowski and Zhijie Wang Pennsylvania Transportation Institute The Pennsylvania State University University Park,
Aerospace Engineering 3521: Flight Dynamics. Prof. Eric Feron Homework 6 due October 20, 2014
 Aerospace Engineering 3521: Flight Dynamics Prof. Eric Feron Homework 6 due October 20, 2014 1 Problem 1: Lateral-directional stability of Navion With the help of Chapter 2 of Nelson s textbook, we established
Aerospace Engineering 3521: Flight Dynamics Prof. Eric Feron Homework 6 due October 20, 2014 1 Problem 1: Lateral-directional stability of Navion With the help of Chapter 2 of Nelson s textbook, we established
Geometric Constraints
 Simulation in Computer Graphics Geometric Constraints Matthias Teschner Computer Science Department University of Freiburg Outline introduction penalty method Lagrange multipliers local constraints University
Simulation in Computer Graphics Geometric Constraints Matthias Teschner Computer Science Department University of Freiburg Outline introduction penalty method Lagrange multipliers local constraints University
3.3. Solving Polynomial Equations. Introduction. Prerequisites. Learning Outcomes
 Solving Polynomial Equations 3.3 Introduction Linear and quadratic equations, dealt within Sections 3.1 and 3.2, are members of a class of equations, called polynomial equations. These have the general
Solving Polynomial Equations 3.3 Introduction Linear and quadratic equations, dealt within Sections 3.1 and 3.2, are members of a class of equations, called polynomial equations. These have the general
Orbital Mechanics. Angular Momentum
 Orbital Mechanics The objects that orbit earth have only a few forces acting on them, the largest being the gravitational pull from the earth. The trajectories that satellites or rockets follow are largely
Orbital Mechanics The objects that orbit earth have only a few forces acting on them, the largest being the gravitational pull from the earth. The trajectories that satellites or rockets follow are largely
Precise Modelling of a Gantry Crane System Including Friction, 3D Angular Swing and Hoisting Cable Flexibility
 Precise Modelling of a Gantry Crane System Including Friction, 3D Angular Swing and Hoisting Cable Flexibility Renuka V. S. & Abraham T Mathew Electrical Engineering Department, NIT Calicut E-mail : renuka_mee@nitc.ac.in,
Precise Modelling of a Gantry Crane System Including Friction, 3D Angular Swing and Hoisting Cable Flexibility Renuka V. S. & Abraham T Mathew Electrical Engineering Department, NIT Calicut E-mail : renuka_mee@nitc.ac.in,
ELECTRICAL ENGINEERING
 EE ELECTRICAL ENGINEERING See beginning of Section H for abbreviations, course numbers and coding. The * denotes labs which are held on alternate weeks. A minimum grade of C is required for all prerequisite
EE ELECTRICAL ENGINEERING See beginning of Section H for abbreviations, course numbers and coding. The * denotes labs which are held on alternate weeks. A minimum grade of C is required for all prerequisite
South Carolina College- and Career-Ready (SCCCR) Pre-Calculus
 Pre-Calculus") South Carolina College- and Career-Ready (SCCCR) Pre-Calculus Key Concepts Arithmetic with Polynomials and Rational Expressions PC.AAPR.2 PC.AAPR.3 PC.AAPR.4 PC.AAPR.5 PC.AAPR.6 PC.AAPR.7 Standards Know
South Carolina College- and Career-Ready (SCCCR) Pre-Calculus Key Concepts Arithmetic with Polynomials and Rational Expressions PC.AAPR.2 PC.AAPR.3 PC.AAPR.4 PC.AAPR.5 PC.AAPR.6 PC.AAPR.7 Standards Know