SOLID MECHANICS BALANCING TUTORIAL BALANCING OF ROTATING BODIES
|
|
|
- Claire Griffith
- 7 years ago
- Views:
Transcription
1 SOLID MECHANICS BALANCING TUTORIAL BALANCING OF ROTATING BODIES This work covers elements of the syllabus for the Edexcel module 21722P HNC/D Mechanical Principles OUTCOME 4. On completion of this tutorial you should be able to do the following. Explain the importance of balancing. Explain static and dynamic balance. Solve problems involving coplanar balance. Solve problems involving balancing in four planes. Construct vector diagrams. Use vector resolution to solve problems. It is assumed that the student is already familiar with the following concepts. Angular motion. Centrifugal force. Basic vector diagram construction. Basic trigonometry. All these above may be found in the pre-requisite tutorials. D.J.Dunn 1

2 1. INTRODUCTION The balancing of rotating bodies is important to avoid vibrations. In heavy industrial machines such as steam turbines and electric generators, vibration could cause catastrophic failure. Vibrations are noisy and uncomfortable and when a car wheel is out of balance, the ride is quite unpleasant. In the case of a simple wheel, balancing simply involves moving the centre of gravity to the centre of rotation but as we shall see, for longer and more complex bodies, there is more to it. For a body to be completely balanced it must have two things. 1. Static Balance. This occurs when there is no resultant centrifugal force and the centre of gravity is on the axis of rotation. 2. Dynamic Balance. This occurs when there is no resulting turning moment along the axis. 2. BALANCING IN ONE PLANE If the system is a simple disc then static balance is all that is needed. Consider a thin disc or wheel on which the centre of gravity is not the same as the centre of rotation. A simple test for static balance is to place the wheel in frictionless bearings. The centre of gravity will always come to rest below the centre of rotation (like a pendulum). If it is balanced it will remain stationary no matter which position it is turned to. Figure 1 If the centre of gravity is distance r from the centre of rotation then when it spins at ω rad/s, centrifugal force is produced. This has a formula C.F.= M ω 2 r where M is the mass of the disc. This is the out of balance force. In order to cancel it out an equal and opposite force is needed. This is simply done by adding a mass M 2 at a radius r 2 as shown. The two forces must have the same magnitudes. M ω 2 r = M 2 ω 2 r 2 M r = M 2 r 2 Placing a suitable mass at a suitable radius moves the centre of gravity to the centre of rotation. This balance holds true at all speeds down to zero hence it is balanced so long as the products of M and r are equal and opposite. Figure 2 D.J.Dunn 2

3 Now consider that our disc is out of balance because there are three masses attached to it as shown. The 3 masses are said to be coplanar and they rotate about a common centre. The centrifugal force acting on each mass is F = M r ω 2. The radius of rotation is r and the angular velocity is ω in radians/second. The force acting on each one is hence F 1 =M 1 r 1 ω 2 F 2 =M 2 r 2 ω 2 F 3 =M 3 r 3 ω 2 Figure 3 These are vector quantities and we can add them up to find the resultant force as shown. Figure 4 If the system was balanced, there would be no resultant force so the force needed to balance the system must be equal and opposite of the resultant (the vector that closes the polygon). The balancing mass M 4 is then added at a suitable radius and angle such that the product M r is correct. Figure 5 D.J.Dunn 3
.")
4 The result obtained would be the same whatever the value of ω and when ω = 0 we have static balance. In order to make the solution easier, we may make ω = 1 and calculate M r for each vector. This is called the M r polygon or vector diagram. Note that angles will be given in normal mathematical terms with anticlockwise being positive from the x axis as shown. Figure 6 WORKED EXAMPLE No.1 Three masses A, B and C are placed on a balanced disc as shown at radii of 120 mm, 100 mm and 80 mm respectively. The masses are 1 kg, 0.5 kg and 0.7 kg respectively. Find the 4 th mass which should be added at a radius of 60 mm in order to statically balance the system. SOLUTION Figure 7 First draw up a table to calculate the value of M r for each mass. Mass radius M r A B C D M D M D Draw the M r polygon to find the value of M r for the 4 th mass. D.J.Dunn 4

5 Figure 8 The resultant is kg mm and is equal to 60M D. The mass required is 144.3/60 = 2.4 kg 208 o anticlockwise of A as shown. SELF ASSESSMENT EXERCISE No. 1 Find the 4 th mass that should be added at a radius of 50 mm in order to statically balance the system shown. Mass A is 1 kg at 100 mm radius. Mass B is 1.5 kg at 75 mm radius Mass C is 2.0 kg at 90 mm radius. Figure 9 Answer 0.52 kg at 156 o clockwise from A. D.J.Dunn 5

6 3. MASSES NOT IN THE SAME PLANE Consider 2 masses statically balanced as shown but acting at different places along the axis. For static balance M A r A = M B r B Figure 10 It is clear that even with static balance, centrifugal force will produce a turning moment about the centre of gravity for the system. In this simple case, the problem is solved by adding equal and opposite forces at the two points as shown. Figure 11 Consider the turning moment due to a single mass. Figure 12 D.J.Dunn 6

7 The centrifugal force produced is F = Mrω 2 The turning moment about the reference plane = T.M. = F x = Mrω 2 x For dynamic and static balance we must work out the resultant turning moment and add masses at appropriate points to cancel it out. The appropriate points will be on two planes not coplanar with any of the original masses. This involves drawing two vector diagrams and since ω is common to all vectors we can again take ω =1 and draw vectors representing Mr and Mrx. This is best explained with a worked example. WORKED EXAMPLE No.2 Find the mass and the angle at which it should be positioned in planes A and D at a radius of 60 mm in order to produce complete balance of the system shown. SOLUTION Figure 13 Note that the diagram has been drawn with B vertical. It is a good idea to always start by making one of the known masses horizontal or vertical to make the construction of the vector diagrams easier. All angles should be expressed in absolute terms. Plane A is the reference plane. All values of x are measured from plane A thus making Mrx for A equal to zero. It follows that it does not appear in the vector diagram. Make up a table as follows leaving unknowns as symbols. M r Mr x Mrx A M A 60 60M A 0 0 B C D M D 60 60M D M D D.J.Dunn 7

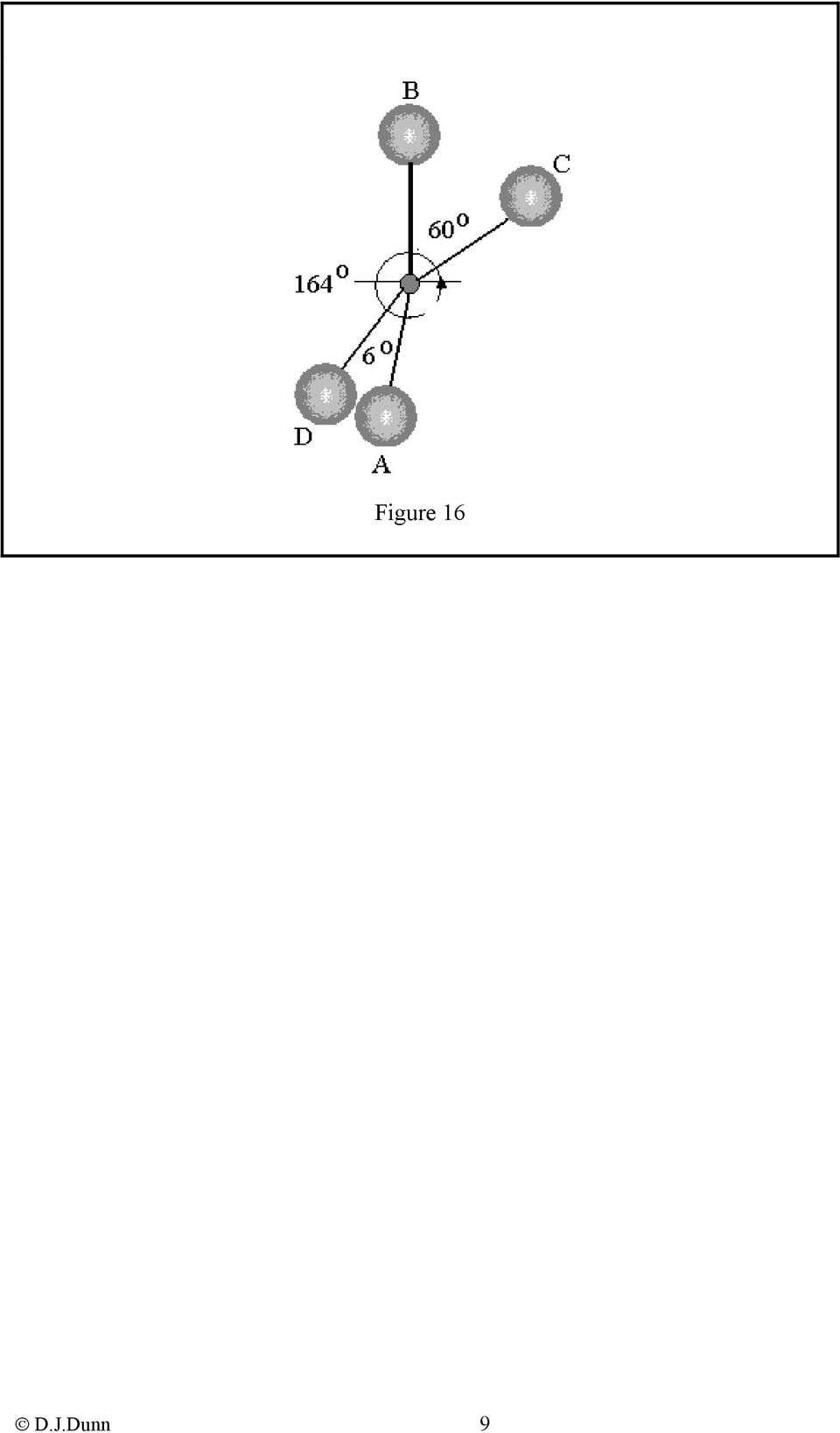
8 Now draw a polygon of Mrx vectors in order to find the value of Mrx at D. Start with B in this case because it is vertical. Figure 14 Scaling the vector D which closes the triangle we find Mrx for D = = M D Hence M D = 94000/22500 = 4.17 kg and it is positioned 254o Now we calculate Mr for D. Mr for D = x 60 = Next we draw the polygon for the Mr values as shown. Figure 15 The vector which closes the polygon represents Mr for point A Mr for A is M A = 195 M A = 195/60 = 3.25 kg at 6 o to the vertical. The answer is best shown with an end view. D.J.Dunn 8

9 Figure 16 D.J.Dunn 9
10 SELF ASSESSMENT EXERCISE No A shaft has 4 discs A, B, C and D along its length 100 mm apart. A mass of 0.8 kg is placed on B at a radius of 20 mm. A mass of 2 kg is placed on C at a radius of 30 mm and rotated 120 o from the mass on B. Finf the masses to be placed on A and D at a radius of 25 mm that wil produce total balance. (Answers kg and 1.52 kg) 2. The diagram below shows masses on two rotors in planes B and C. Determine the masses to be added on the rotors in planes A and D at radius 40 mm which will produce static and dynamic balance.( 1.9 kg at 177 o and 2.2 kg at 141 o ) Figure 17 D.J.Dunn 10

11 4 SOLUTION BY USING VECTOR RESOLUTION A more accurate approach to solving the vector diagrams in the preceding work is to resolve each vector into vertical and horizontal components. The resultant vector is then found by adding these components. Consider worked example No.1 again. Figure 18 Each vector has a component in the x direction given by Mr cosθ and in the y direction it is MRsinθ Figure 19 Work out these for each vector and include it in the table. Mass radius M r θ Mr cosθ MRsinθ A o B o C o Totals The resultant vector has x and y components of and This can be solved with Pythagoras. Resultant Mr = ( ) ½ = kg mm as before. The mass required is 144.3/60 = 2.4 kg. The angle φ = atan (67.9/127.3) or tan -1 (67.9/127.3) = 28 o The balancing force is 180o anticlockwise of this so the balancing mass must be placed at an angle of 208 o. D.J.Dunn 11

12 Here is the solution to worked example No.2 using the same method. Mass radius M r x Mrx θ A M A M A 0 0 unknown B C D M D M D M D unknown MRx cosθ MRxsinθ If balanced, the totals must be zero A 0 0 so the unknown values may be B deduced. C D Totals 0 0 Resultant Mrx for D = ( ) ½ = This is the value for D so M D = M D =9360/22500 = 4.16 kg φ = tan -1 (90000/25980) = o so the true angle θ is 180 o o = o Now fill in the table for the Mr values. Again the totals must be zero so we can deduce the values for A. M r M r θ Mr cosθ MRsinθ A M A M A B C D o Totals 0 0 Resultant Mr vector is ( ) ½ = and this is equal to 60 MA. M A = 185.8/60 = 3.1 kg φ = = tan -1 (185/17.3) = 84.6 o so the true angle θ is 180 o o = o This gives a more accurate answer than that produced by drawing and scaling. D.J.Dunn 12
 ½ = 93670 This is the value for D so 22500 M D = 93670 M D =9360/22500 = 4.16 kg φ = tan -1 (90000/25980) = 73.")
Mechanical Principles
 Unit 4: Mechanical Principles Unit code: F/601/1450 QCF level: 5 Credit value: 15 OUTCOME 4 POWER TRANSMISSION TUTORIAL 2 BALANCING 4. Dynamics of rotating systems Single and multi-link mechanisms: slider
Unit 4: Mechanical Principles Unit code: F/601/1450 QCF level: 5 Credit value: 15 OUTCOME 4 POWER TRANSMISSION TUTORIAL 2 BALANCING 4. Dynamics of rotating systems Single and multi-link mechanisms: slider
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA MECHANICAL PRINCIPLES AND APPLICATIONS NQF LEVEL 3 OUTCOME 1 - LOADING SYSTEMS
 EDEXCEL NATIONAL CERTIFICATE/DIPLOMA MECHANICAL PRINCIPLES AND APPLICATIONS NQF LEVEL 3 OUTCOME 1 - LOADING SYSTEMS TUTORIAL 1 NON-CONCURRENT COPLANAR FORCE SYSTEMS 1. Be able to determine the effects
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA MECHANICAL PRINCIPLES AND APPLICATIONS NQF LEVEL 3 OUTCOME 1 - LOADING SYSTEMS TUTORIAL 1 NON-CONCURRENT COPLANAR FORCE SYSTEMS 1. Be able to determine the effects
ANALYTICAL METHODS FOR ENGINEERS
 UNIT 1: Unit code: QCF Level: 4 Credit value: 15 ANALYTICAL METHODS FOR ENGINEERS A/601/1401 OUTCOME - TRIGONOMETRIC METHODS TUTORIAL 1 SINUSOIDAL FUNCTION Be able to analyse and model engineering situations
UNIT 1: Unit code: QCF Level: 4 Credit value: 15 ANALYTICAL METHODS FOR ENGINEERS A/601/1401 OUTCOME - TRIGONOMETRIC METHODS TUTORIAL 1 SINUSOIDAL FUNCTION Be able to analyse and model engineering situations
ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D225 TUTORIAL 1 LINEAR AND ANGULAR DISPLACEMENT, VELOCITY AND ACCELERATION
 ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D225 TUTORIAL 1 LINEAR AND ANGULAR DISPLACEMENT, VELOCITY AND ACCELERATION This tutorial covers pre-requisite material and should be skipped if you are
ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D225 TUTORIAL 1 LINEAR AND ANGULAR DISPLACEMENT, VELOCITY AND ACCELERATION This tutorial covers pre-requisite material and should be skipped if you are
SOLID MECHANICS TUTORIAL MECHANISMS KINEMATICS - VELOCITY AND ACCELERATION DIAGRAMS
 SOLID MECHANICS TUTORIAL MECHANISMS KINEMATICS - VELOCITY AND ACCELERATION DIAGRAMS This work covers elements of the syllabus for the Engineering Council exams C105 Mechanical and Structural Engineering
SOLID MECHANICS TUTORIAL MECHANISMS KINEMATICS - VELOCITY AND ACCELERATION DIAGRAMS This work covers elements of the syllabus for the Engineering Council exams C105 Mechanical and Structural Engineering
FLUID MECHANICS. TUTORIAL No.7 FLUID FORCES. When you have completed this tutorial you should be able to. Solve forces due to pressure difference.
 FLUID MECHANICS TUTORIAL No.7 FLUID FORCES When you have completed this tutorial you should be able to Solve forces due to pressure difference. Solve problems due to momentum changes. Solve problems involving
FLUID MECHANICS TUTORIAL No.7 FLUID FORCES When you have completed this tutorial you should be able to Solve forces due to pressure difference. Solve problems due to momentum changes. Solve problems involving
Chapter 10 Rotational Motion. Copyright 2009 Pearson Education, Inc.
 Chapter 10 Rotational Motion Angular Quantities Units of Chapter 10 Vector Nature of Angular Quantities Constant Angular Acceleration Torque Rotational Dynamics; Torque and Rotational Inertia Solving Problems
Chapter 10 Rotational Motion Angular Quantities Units of Chapter 10 Vector Nature of Angular Quantities Constant Angular Acceleration Torque Rotational Dynamics; Torque and Rotational Inertia Solving Problems
Centripetal Force. This result is independent of the size of r. A full circle has 2π rad, and 360 deg = 2π rad.
 Centripetal Force 1 Introduction In classical mechanics, the dynamics of a point particle are described by Newton s 2nd law, F = m a, where F is the net force, m is the mass, and a is the acceleration.
Centripetal Force 1 Introduction In classical mechanics, the dynamics of a point particle are described by Newton s 2nd law, F = m a, where F is the net force, m is the mass, and a is the acceleration.
Solution Derivations for Capa #11
 Solution Derivations for Capa #11 1) A horizontal circular platform (M = 128.1 kg, r = 3.11 m) rotates about a frictionless vertical axle. A student (m = 68.3 kg) walks slowly from the rim of the platform
Solution Derivations for Capa #11 1) A horizontal circular platform (M = 128.1 kg, r = 3.11 m) rotates about a frictionless vertical axle. A student (m = 68.3 kg) walks slowly from the rim of the platform
ENGINEERING SCIENCE H1 OUTCOME 1 - TUTORIAL 3 BENDING MOMENTS EDEXCEL HNC/D ENGINEERING SCIENCE LEVEL 4 H1 FORMERLY UNIT 21718P
 ENGINEERING SCIENCE H1 OUTCOME 1 - TUTORIAL 3 BENDING MOMENTS EDEXCEL HNC/D ENGINEERING SCIENCE LEVEL 4 H1 FORMERLY UNIT 21718P This material is duplicated in the Mechanical Principles module H2 and those
ENGINEERING SCIENCE H1 OUTCOME 1 - TUTORIAL 3 BENDING MOMENTS EDEXCEL HNC/D ENGINEERING SCIENCE LEVEL 4 H1 FORMERLY UNIT 21718P This material is duplicated in the Mechanical Principles module H2 and those
Unit 4 Practice Test: Rotational Motion
 Unit 4 Practice Test: Rotational Motion Multiple Guess Identify the letter of the choice that best completes the statement or answers the question. 1. How would an angle in radians be converted to an angle
Unit 4 Practice Test: Rotational Motion Multiple Guess Identify the letter of the choice that best completes the statement or answers the question. 1. How would an angle in radians be converted to an angle
MECHANICAL PRINCIPLES OUTCOME 4 MECHANICAL POWER TRANSMISSION TUTORIAL 1 SIMPLE MACHINES
 MECHANICAL PRINCIPLES OUTCOME 4 MECHANICAL POWER TRANSMISSION TUTORIAL 1 SIMPLE MACHINES Simple machines: lifting devices e.g. lever systems, inclined plane, screw jack, pulley blocks, Weston differential
MECHANICAL PRINCIPLES OUTCOME 4 MECHANICAL POWER TRANSMISSION TUTORIAL 1 SIMPLE MACHINES Simple machines: lifting devices e.g. lever systems, inclined plane, screw jack, pulley blocks, Weston differential
AP Physics Circular Motion Practice Test B,B,B,A,D,D,C,B,D,B,E,E,E, 14. 6.6m/s, 0.4 N, 1.5 m, 6.3m/s, 15. 12.9 m/s, 22.9 m/s
 AP Physics Circular Motion Practice Test B,B,B,A,D,D,C,B,D,B,E,E,E, 14. 6.6m/s, 0.4 N, 1.5 m, 6.3m/s, 15. 12.9 m/s, 22.9 m/s Answer the multiple choice questions (2 Points Each) on this sheet with capital
AP Physics Circular Motion Practice Test B,B,B,A,D,D,C,B,D,B,E,E,E, 14. 6.6m/s, 0.4 N, 1.5 m, 6.3m/s, 15. 12.9 m/s, 22.9 m/s Answer the multiple choice questions (2 Points Each) on this sheet with capital
Physics 201 Homework 8
 Physics 201 Homework 8 Feb 27, 2013 1. A ceiling fan is turned on and a net torque of 1.8 N-m is applied to the blades. 8.2 rad/s 2 The blades have a total moment of inertia of 0.22 kg-m 2. What is the
Physics 201 Homework 8 Feb 27, 2013 1. A ceiling fan is turned on and a net torque of 1.8 N-m is applied to the blades. 8.2 rad/s 2 The blades have a total moment of inertia of 0.22 kg-m 2. What is the
Practice Exam Three Solutions
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Physics Physics 8.01T Fall Term 2004 Practice Exam Three Solutions Problem 1a) (5 points) Collisions and Center of Mass Reference Frame In the lab frame,
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Physics Physics 8.01T Fall Term 2004 Practice Exam Three Solutions Problem 1a) (5 points) Collisions and Center of Mass Reference Frame In the lab frame,
Problem Set 1. Ans: a = 1.74 m/s 2, t = 4.80 s
 Problem Set 1 1.1 A bicyclist starts from rest and after traveling along a straight path a distance of 20 m reaches a speed of 30 km/h. Determine her constant acceleration. How long does it take her to
Problem Set 1 1.1 A bicyclist starts from rest and after traveling along a straight path a distance of 20 m reaches a speed of 30 km/h. Determine her constant acceleration. How long does it take her to
SOLID MECHANICS DYNAMICS TUTORIAL PULLEY DRIVE SYSTEMS. This work covers elements of the syllabus for the Edexcel module HNC/D Mechanical Principles.
 SOLID MECHANICS DYNAMICS TUTORIAL PULLEY DRIVE SYSTEMS This work covers elements of the syllabus for the Edexcel module HNC/D Mechanical Principles. On completion of this tutorial you should be able to
SOLID MECHANICS DYNAMICS TUTORIAL PULLEY DRIVE SYSTEMS This work covers elements of the syllabus for the Edexcel module HNC/D Mechanical Principles. On completion of this tutorial you should be able to
Rotation: Moment of Inertia and Torque
 Rotation: Moment of Inertia and Torque Every time we push a door open or tighten a bolt using a wrench, we apply a force that results in a rotational motion about a fixed axis. Through experience we learn
Rotation: Moment of Inertia and Torque Every time we push a door open or tighten a bolt using a wrench, we apply a force that results in a rotational motion about a fixed axis. Through experience we learn
Tennessee State University
 Tennessee State University Dept. of Physics & Mathematics PHYS 2010 CF SU 2009 Name 30% Time is 2 hours. Cheating will give you an F-grade. Other instructions will be given in the Hall. MULTIPLE CHOICE.
Tennessee State University Dept. of Physics & Mathematics PHYS 2010 CF SU 2009 Name 30% Time is 2 hours. Cheating will give you an F-grade. Other instructions will be given in the Hall. MULTIPLE CHOICE.
Center of Gravity. We touched on this briefly in chapter 7! x 2
 Center of Gravity We touched on this briefly in chapter 7! x 1 x 2 cm m 1 m 2 This was for what is known as discrete objects. Discrete refers to the fact that the two objects separated and individual.
Center of Gravity We touched on this briefly in chapter 7! x 1 x 2 cm m 1 m 2 This was for what is known as discrete objects. Discrete refers to the fact that the two objects separated and individual.
PHY121 #8 Midterm I 3.06.2013
 PHY11 #8 Midterm I 3.06.013 AP Physics- Newton s Laws AP Exam Multiple Choice Questions #1 #4 1. When the frictionless system shown above is accelerated by an applied force of magnitude F, the tension
PHY11 #8 Midterm I 3.06.013 AP Physics- Newton s Laws AP Exam Multiple Choice Questions #1 #4 1. When the frictionless system shown above is accelerated by an applied force of magnitude F, the tension
Lecture 6. Weight. Tension. Normal Force. Static Friction. Cutnell+Johnson: 4.8-4.12, second half of section 4.7
 Lecture 6 Weight Tension Normal Force Static Friction Cutnell+Johnson: 4.8-4.12, second half of section 4.7 In this lecture, I m going to discuss four different kinds of forces: weight, tension, the normal
Lecture 6 Weight Tension Normal Force Static Friction Cutnell+Johnson: 4.8-4.12, second half of section 4.7 In this lecture, I m going to discuss four different kinds of forces: weight, tension, the normal
Midterm Solutions. mvr = ω f (I wheel + I bullet ) = ω f 2 MR2 + mr 2 ) ω f = v R. 1 + M 2m
 = ω f 2 MR2 + mr 2 ) ω f = v R. 1 + M 2m") Midterm Solutions I) A bullet of mass m moving at horizontal velocity v strikes and sticks to the rim of a wheel a solid disc) of mass M, radius R, anchored at its center but free to rotate i) Which of
Midterm Solutions I) A bullet of mass m moving at horizontal velocity v strikes and sticks to the rim of a wheel a solid disc) of mass M, radius R, anchored at its center but free to rotate i) Which of
Physics 1A Lecture 10C
 Physics 1A Lecture 10C "If you neglect to recharge a battery, it dies. And if you run full speed ahead without stopping for water, you lose momentum to finish the race. --Oprah Winfrey Static Equilibrium
Physics 1A Lecture 10C "If you neglect to recharge a battery, it dies. And if you run full speed ahead without stopping for water, you lose momentum to finish the race. --Oprah Winfrey Static Equilibrium
SOLID MECHANICS DYNAMICS TUTORIAL CENTRIPETAL FORCE
 SOLID MECHANICS DYNAMICS TUTORIAL CENTRIPETAL FORCE This work coers elements of the syllabus for the Engineering Council Exam D5 Dynamics of Mechanical Systems C10 Engineering Science. This tutorial examines
SOLID MECHANICS DYNAMICS TUTORIAL CENTRIPETAL FORCE This work coers elements of the syllabus for the Engineering Council Exam D5 Dynamics of Mechanical Systems C10 Engineering Science. This tutorial examines
Examples of Scalar and Vector Quantities 1. Candidates should be able to : QUANTITY VECTOR SCALAR
 Candidates should be able to : Examples of Scalar and Vector Quantities 1 QUANTITY VECTOR SCALAR Define scalar and vector quantities and give examples. Draw and use a vector triangle to determine the resultant
Candidates should be able to : Examples of Scalar and Vector Quantities 1 QUANTITY VECTOR SCALAR Define scalar and vector quantities and give examples. Draw and use a vector triangle to determine the resultant
www.mathsbox.org.uk Displacement (x) Velocity (v) Acceleration (a) x = f(t) differentiate v = dx Acceleration Velocity (v) Displacement x
 Velocity (v) Acceleration (a) x = f(t) differentiate v = dx Acceleration Velocity (v) Displacement x") Mechanics 2 : Revision Notes 1. Kinematics and variable acceleration Displacement (x) Velocity (v) Acceleration (a) x = f(t) differentiate v = dx differentiate a = dv = d2 x dt dt dt 2 Acceleration Velocity
Mechanics 2 : Revision Notes 1. Kinematics and variable acceleration Displacement (x) Velocity (v) Acceleration (a) x = f(t) differentiate v = dx differentiate a = dv = d2 x dt dt dt 2 Acceleration Velocity
C B A T 3 T 2 T 1. 1. What is the magnitude of the force T 1? A) 37.5 N B) 75.0 N C) 113 N D) 157 N E) 192 N
 37.5 N B) 75.0 N C) 113 N D) 157 N E) 192 N") Three boxes are connected by massless strings and are resting on a frictionless table. Each box has a mass of 15 kg, and the tension T 1 in the right string is accelerating the boxes to the right at a
Three boxes are connected by massless strings and are resting on a frictionless table. Each box has a mass of 15 kg, and the tension T 1 in the right string is accelerating the boxes to the right at a
PHYS 211 FINAL FALL 2004 Form A
 1. Two boys with masses of 40 kg and 60 kg are holding onto either end of a 10 m long massless pole which is initially at rest and floating in still water. They pull themselves along the pole toward each
1. Two boys with masses of 40 kg and 60 kg are holding onto either end of a 10 m long massless pole which is initially at rest and floating in still water. They pull themselves along the pole toward each
SOLID MECHANICS DYNAMICS TUTORIAL NATURAL VIBRATIONS ONE DEGREE OF FREEDOM
 SOLID MECHANICS DYNAMICS TUTORIAL NATURAL VIBRATIONS ONE DEGREE OF FREEDOM This work covers elements of the syllabus for the Engineering Council Exam D5 Dynamics of Mechanical Systems, C05 Mechanical and
SOLID MECHANICS DYNAMICS TUTORIAL NATURAL VIBRATIONS ONE DEGREE OF FREEDOM This work covers elements of the syllabus for the Engineering Council Exam D5 Dynamics of Mechanical Systems, C05 Mechanical and
Mechanical Principles
 Unit 4: Mechanical Principles Unit code: F/60/450 QCF level: 5 Credit value: 5 OUTCOME 3 POWER TRANSMISSION TUTORIAL BELT DRIVES 3 Power Transmission Belt drives: flat and v-section belts; limiting coefficient
Unit 4: Mechanical Principles Unit code: F/60/450 QCF level: 5 Credit value: 5 OUTCOME 3 POWER TRANSMISSION TUTORIAL BELT DRIVES 3 Power Transmission Belt drives: flat and v-section belts; limiting coefficient
PHYSICS 111 HOMEWORK SOLUTION #9. April 5, 2013
 PHYSICS 111 HOMEWORK SOLUTION #9 April 5, 2013 0.1 A potter s wheel moves uniformly from rest to an angular speed of 0.16 rev/s in 33 s. Find its angular acceleration in radians per second per second.
PHYSICS 111 HOMEWORK SOLUTION #9 April 5, 2013 0.1 A potter s wheel moves uniformly from rest to an angular speed of 0.16 rev/s in 33 s. Find its angular acceleration in radians per second per second.
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA UNIT 5 - ELECTRICAL AND ELECTRONIC PRINCIPLES NQF LEVEL 3 OUTCOME 4 - ALTERNATING CURRENT
 EDEXCEL NATIONAL CERTIFICATE/DIPLOMA UNIT 5 - ELECTRICAL AND ELECTRONIC PRINCIPLES NQF LEVEL 3 OUTCOME 4 - ALTERNATING CURRENT 4 Understand single-phase alternating current (ac) theory Single phase AC
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA UNIT 5 - ELECTRICAL AND ELECTRONIC PRINCIPLES NQF LEVEL 3 OUTCOME 4 - ALTERNATING CURRENT 4 Understand single-phase alternating current (ac) theory Single phase AC
Weight The weight of an object is defined as the gravitational force acting on the object. Unit: Newton (N)
") Gravitational Field A gravitational field as a region in which an object experiences a force due to gravitational attraction Gravitational Field Strength The gravitational field strength at a point in
Gravitational Field A gravitational field as a region in which an object experiences a force due to gravitational attraction Gravitational Field Strength The gravitational field strength at a point in
SOLID MECHANICS DYNAMICS TUTORIAL MOMENT OF INERTIA. This work covers elements of the following syllabi.
 SOLID MECHANICS DYNAMICS TUTOIAL MOMENT OF INETIA This work covers elements of the following syllabi. Parts of the Engineering Council Graduate Diploma Exam D5 Dynamics of Mechanical Systems Parts of the
SOLID MECHANICS DYNAMICS TUTOIAL MOMENT OF INETIA This work covers elements of the following syllabi. Parts of the Engineering Council Graduate Diploma Exam D5 Dynamics of Mechanical Systems Parts of the
Lecture 16. Newton s Second Law for Rotation. Moment of Inertia. Angular momentum. Cutnell+Johnson: 9.4, 9.6
 Lecture 16 Newton s Second Law for Rotation Moment of Inertia Angular momentum Cutnell+Johnson: 9.4, 9.6 Newton s Second Law for Rotation Newton s second law says how a net force causes an acceleration.
Lecture 16 Newton s Second Law for Rotation Moment of Inertia Angular momentum Cutnell+Johnson: 9.4, 9.6 Newton s Second Law for Rotation Newton s second law says how a net force causes an acceleration.
MECHANICAL PRINCIPLES HNC/D MOMENTS OF AREA. Define and calculate 1st. moments of areas. Define and calculate 2nd moments of areas.
 MECHANICAL PRINCIPLES HNC/D MOMENTS OF AREA The concepts of first and second moments of area fundamental to several areas of engineering including solid mechanics and fluid mechanics. Students who are
MECHANICAL PRINCIPLES HNC/D MOMENTS OF AREA The concepts of first and second moments of area fundamental to several areas of engineering including solid mechanics and fluid mechanics. Students who are
Figure 1.1 Vector A and Vector F
 CHAPTER I VECTOR QUANTITIES Quantities are anything which can be measured, and stated with number. Quantities in physics are divided into two types; scalar and vector quantities. Scalar quantities have
CHAPTER I VECTOR QUANTITIES Quantities are anything which can be measured, and stated with number. Quantities in physics are divided into two types; scalar and vector quantities. Scalar quantities have
Chapter 18 Static Equilibrium
 Chapter 8 Static Equilibrium 8. Introduction Static Equilibrium... 8. Lever Law... Example 8. Lever Law... 4 8.3 Generalized Lever Law... 5 8.4 Worked Examples... 7 Example 8. Suspended Rod... 7 Example
Chapter 8 Static Equilibrium 8. Introduction Static Equilibrium... 8. Lever Law... Example 8. Lever Law... 4 8.3 Generalized Lever Law... 5 8.4 Worked Examples... 7 Example 8. Suspended Rod... 7 Example
3 Work, Power and Energy
 3 Work, Power and Energy At the end of this section you should be able to: a. describe potential energy as energy due to position and derive potential energy as mgh b. describe kinetic energy as energy
3 Work, Power and Energy At the end of this section you should be able to: a. describe potential energy as energy due to position and derive potential energy as mgh b. describe kinetic energy as energy
MECHANICS OF SOLIDS - BEAMS TUTORIAL 2 SHEAR FORCE AND BENDING MOMENTS IN BEAMS
 MECHANICS OF SOLIDS - BEAMS TUTORIAL 2 SHEAR FORCE AND BENDING MOMENTS IN BEAMS This is the second tutorial on bending of beams. You should judge your progress by completing the self assessment exercises.
MECHANICS OF SOLIDS - BEAMS TUTORIAL 2 SHEAR FORCE AND BENDING MOMENTS IN BEAMS This is the second tutorial on bending of beams. You should judge your progress by completing the self assessment exercises.
11. Rotation Translational Motion: Rotational Motion:
 11. Rotation Translational Motion: Motion of the center of mass of an object from one position to another. All the motion discussed so far belongs to this category, except uniform circular motion. Rotational
11. Rotation Translational Motion: Motion of the center of mass of an object from one position to another. All the motion discussed so far belongs to this category, except uniform circular motion. Rotational
CHAPTER 15 FORCE, MASS AND ACCELERATION
 CHAPTER 5 FORCE, MASS AND ACCELERATION EXERCISE 83, Page 9. A car initially at rest accelerates uniformly to a speed of 55 km/h in 4 s. Determine the accelerating force required if the mass of the car
CHAPTER 5 FORCE, MASS AND ACCELERATION EXERCISE 83, Page 9. A car initially at rest accelerates uniformly to a speed of 55 km/h in 4 s. Determine the accelerating force required if the mass of the car
Fric-3. force F k and the equation (4.2) may be used. The sense of F k is opposite
 may be used. The sense of F k is opposite") 4. FRICTION 4.1 Laws of friction. We know from experience that when two bodies tend to slide on each other a resisting force appears at their surface of contact which opposes their relative motion. The
4. FRICTION 4.1 Laws of friction. We know from experience that when two bodies tend to slide on each other a resisting force appears at their surface of contact which opposes their relative motion. The
Chapter 4. Forces and Newton s Laws of Motion. continued
 Chapter 4 Forces and Newton s Laws of Motion continued 4.9 Static and Kinetic Frictional Forces When an object is in contact with a surface forces can act on the objects. The component of this force acting
Chapter 4 Forces and Newton s Laws of Motion continued 4.9 Static and Kinetic Frictional Forces When an object is in contact with a surface forces can act on the objects. The component of this force acting
Unit - 6 Vibrations of Two Degree of Freedom Systems
 Unit - 6 Vibrations of Two Degree of Freedom Systems Dr. T. Jagadish. Professor for Post Graduation, Department of Mechanical Engineering, Bangalore Institute of Technology, Bangalore Introduction A two
Unit - 6 Vibrations of Two Degree of Freedom Systems Dr. T. Jagadish. Professor for Post Graduation, Department of Mechanical Engineering, Bangalore Institute of Technology, Bangalore Introduction A two
Universal Law of Gravitation
 Universal Law of Gravitation Law: Every body exerts a force of attraction on every other body. This force called, gravity, is relatively weak and decreases rapidly with the distance separating the bodies
Universal Law of Gravitation Law: Every body exerts a force of attraction on every other body. This force called, gravity, is relatively weak and decreases rapidly with the distance separating the bodies
PHYS 101-4M, Fall 2005 Exam #3. MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question.
 PHYS 101-4M, Fall 2005 Exam #3 Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A bicycle wheel rotates uniformly through 2.0 revolutions in
PHYS 101-4M, Fall 2005 Exam #3 Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A bicycle wheel rotates uniformly through 2.0 revolutions in
Physics 2A, Sec B00: Mechanics -- Winter 2011 Instructor: B. Grinstein Final Exam
 Physics 2A, Sec B00: Mechanics -- Winter 2011 Instructor: B. Grinstein Final Exam INSTRUCTIONS: Use a pencil #2 to fill your scantron. Write your code number and bubble it in under "EXAM NUMBER;" an entry
Physics 2A, Sec B00: Mechanics -- Winter 2011 Instructor: B. Grinstein Final Exam INSTRUCTIONS: Use a pencil #2 to fill your scantron. Write your code number and bubble it in under "EXAM NUMBER;" an entry
Linear Motion vs. Rotational Motion
 Linear Motion vs. Rotational Motion Linear motion involves an object moving from one point to another in a straight line. Rotational motion involves an object rotating about an axis. Examples include a
Linear Motion vs. Rotational Motion Linear motion involves an object moving from one point to another in a straight line. Rotational motion involves an object rotating about an axis. Examples include a
3. KINEMATICS IN TWO DIMENSIONS; VECTORS.
 3. KINEMATICS IN TWO DIMENSIONS; VECTORS. Key words: Motion in Two Dimensions, Scalars, Vectors, Addition of Vectors by Graphical Methods, Tail to Tip Method, Parallelogram Method, Negative Vector, Vector
3. KINEMATICS IN TWO DIMENSIONS; VECTORS. Key words: Motion in Two Dimensions, Scalars, Vectors, Addition of Vectors by Graphical Methods, Tail to Tip Method, Parallelogram Method, Negative Vector, Vector
Awell-known lecture demonstration1
 Acceleration of a Pulled Spool Carl E. Mungan, Physics Department, U.S. Naval Academy, Annapolis, MD 40-506; mungan@usna.edu Awell-known lecture demonstration consists of pulling a spool by the free end
Acceleration of a Pulled Spool Carl E. Mungan, Physics Department, U.S. Naval Academy, Annapolis, MD 40-506; mungan@usna.edu Awell-known lecture demonstration consists of pulling a spool by the free end
Mechanics lecture 7 Moment of a force, torque, equilibrium of a body
 G.1 EE1.el3 (EEE1023): Electronics III Mechanics lecture 7 Moment of a force, torque, equilibrium of a body Dr Philip Jackson http://www.ee.surrey.ac.uk/teaching/courses/ee1.el3/ G.2 Moments, torque and
G.1 EE1.el3 (EEE1023): Electronics III Mechanics lecture 7 Moment of a force, torque, equilibrium of a body Dr Philip Jackson http://www.ee.surrey.ac.uk/teaching/courses/ee1.el3/ G.2 Moments, torque and
Dynamics of Rotational Motion
 Chapter 10 Dynamics of Rotational Motion PowerPoint Lectures for University Physics, Twelfth Edition Hugh D. Young and Roger A. Freedman Lectures by James Pazun Modified by P. Lam 5_31_2012 Goals for Chapter
Chapter 10 Dynamics of Rotational Motion PowerPoint Lectures for University Physics, Twelfth Edition Hugh D. Young and Roger A. Freedman Lectures by James Pazun Modified by P. Lam 5_31_2012 Goals for Chapter
Physics 1120: Simple Harmonic Motion Solutions
 Questions: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Physics 1120: Simple Harmonic Motion Solutions 1. A 1.75 kg particle moves as function of time as follows: x = 4cos(1.33t+π/5) where distance is measured
Questions: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Physics 1120: Simple Harmonic Motion Solutions 1. A 1.75 kg particle moves as function of time as follows: x = 4cos(1.33t+π/5) where distance is measured
PHY231 Section 2, Form A March 22, 2012. 1. Which one of the following statements concerning kinetic energy is true?
 1. Which one of the following statements concerning kinetic energy is true? A) Kinetic energy can be measured in watts. B) Kinetic energy is always equal to the potential energy. C) Kinetic energy is always
1. Which one of the following statements concerning kinetic energy is true? A) Kinetic energy can be measured in watts. B) Kinetic energy is always equal to the potential energy. C) Kinetic energy is always
Lecture L5 - Other Coordinate Systems
 S. Widnall, J. Peraire 16.07 Dynamics Fall 008 Version.0 Lecture L5 - Other Coordinate Systems In this lecture, we will look at some other common systems of coordinates. We will present polar coordinates
S. Widnall, J. Peraire 16.07 Dynamics Fall 008 Version.0 Lecture L5 - Other Coordinate Systems In this lecture, we will look at some other common systems of coordinates. We will present polar coordinates
Chapter 11 Equilibrium
 11.1 The First Condition of Equilibrium The first condition of equilibrium deals with the forces that cause possible translations of a body. The simplest way to define the translational equilibrium of
11.1 The First Condition of Equilibrium The first condition of equilibrium deals with the forces that cause possible translations of a body. The simplest way to define the translational equilibrium of
Chosen problems and their final solutions of Chap. 2 (Waldron)- Par 1
- Par 1") Chosen problems and their final solutions of Chap. 2 (Waldron)- Par 1 1. In the mechanism shown below, link 2 is rotating CCW at the rate of 2 rad/s (constant). In the position shown, link 2 is horizontal
Chosen problems and their final solutions of Chap. 2 (Waldron)- Par 1 1. In the mechanism shown below, link 2 is rotating CCW at the rate of 2 rad/s (constant). In the position shown, link 2 is horizontal
HW Set VI page 1 of 9 PHYSICS 1401 (1) homework solutions
 homework solutions") HW Set VI page 1 of 9 10-30 A 10 g bullet moving directly upward at 1000 m/s strikes and passes through the center of mass of a 5.0 kg block initially at rest (Fig. 10-33 ). The bullet emerges from the
HW Set VI page 1 of 9 10-30 A 10 g bullet moving directly upward at 1000 m/s strikes and passes through the center of mass of a 5.0 kg block initially at rest (Fig. 10-33 ). The bullet emerges from the
226 Chapter 15: OSCILLATIONS
 Chapter 15: OSCILLATIONS 1. In simple harmonic motion, the restoring force must be proportional to the: A. amplitude B. frequency C. velocity D. displacement E. displacement squared 2. An oscillatory motion
Chapter 15: OSCILLATIONS 1. In simple harmonic motion, the restoring force must be proportional to the: A. amplitude B. frequency C. velocity D. displacement E. displacement squared 2. An oscillatory motion
Lecture L3 - Vectors, Matrices and Coordinate Transformations
 S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
Chapter 9 Circular Motion Dynamics
 Chapter 9 Circular Motion Dynamics 9. Introduction Newton s Second Law and Circular Motion... 9. Universal Law of Gravitation and the Circular Orbit of the Moon... 9.. Universal Law of Gravitation... 3
Chapter 9 Circular Motion Dynamics 9. Introduction Newton s Second Law and Circular Motion... 9. Universal Law of Gravitation and the Circular Orbit of the Moon... 9.. Universal Law of Gravitation... 3
Lab 7: Rotational Motion
 Lab 7: Rotational Motion Equipment: DataStudio, rotary motion sensor mounted on 80 cm rod and heavy duty bench clamp (PASCO ME-9472), string with loop at one end and small white bead at the other end (125
Lab 7: Rotational Motion Equipment: DataStudio, rotary motion sensor mounted on 80 cm rod and heavy duty bench clamp (PASCO ME-9472), string with loop at one end and small white bead at the other end (125
Work Energy & Power. September 2000 Number 05. 1. Work If a force acts on a body and causes it to move, then the force is doing work.
 PhysicsFactsheet September 2000 Number 05 Work Energy & Power 1. Work If a force acts on a body and causes it to move, then the force is doing work. W = Fs W = work done (J) F = force applied (N) s = distance
PhysicsFactsheet September 2000 Number 05 Work Energy & Power 1. Work If a force acts on a body and causes it to move, then the force is doing work. W = Fs W = work done (J) F = force applied (N) s = distance
Newton s Law of Motion
 chapter 5 Newton s Law of Motion Static system 1. Hanging two identical masses Context in the textbook: Section 5.3, combination of forces, Example 4. Vertical motion without friction 2. Elevator: Decelerating
chapter 5 Newton s Law of Motion Static system 1. Hanging two identical masses Context in the textbook: Section 5.3, combination of forces, Example 4. Vertical motion without friction 2. Elevator: Decelerating
F N A) 330 N 0.31 B) 310 N 0.33 C) 250 N 0.27 D) 290 N 0.30 E) 370 N 0.26
 330 N 0.31 B) 310 N 0.33 C) 250 N 0.27 D) 290 N 0.30 E) 370 N 0.26") Physics 23 Exam 2 Spring 2010 Dr. Alward Page 1 1. A 250-N force is directed horizontally as shown to push a 29-kg box up an inclined plane at a constant speed. Determine the magnitude of the normal force,
Physics 23 Exam 2 Spring 2010 Dr. Alward Page 1 1. A 250-N force is directed horizontally as shown to push a 29-kg box up an inclined plane at a constant speed. Determine the magnitude of the normal force,
Chapter 5 Using Newton s Laws: Friction, Circular Motion, Drag Forces. Copyright 2009 Pearson Education, Inc.
 Chapter 5 Using Newton s Laws: Friction, Circular Motion, Drag Forces Units of Chapter 5 Applications of Newton s Laws Involving Friction Uniform Circular Motion Kinematics Dynamics of Uniform Circular
Chapter 5 Using Newton s Laws: Friction, Circular Motion, Drag Forces Units of Chapter 5 Applications of Newton s Laws Involving Friction Uniform Circular Motion Kinematics Dynamics of Uniform Circular
Mathematics Notes for Class 12 chapter 10. Vector Algebra
 1 P a g e Mathematics Notes for Class 12 chapter 10. Vector Algebra A vector has direction and magnitude both but scalar has only magnitude. Magnitude of a vector a is denoted by a or a. It is non-negative
1 P a g e Mathematics Notes for Class 12 chapter 10. Vector Algebra A vector has direction and magnitude both but scalar has only magnitude. Magnitude of a vector a is denoted by a or a. It is non-negative
PHYSICS 111 HOMEWORK SOLUTION #10. April 8, 2013
 PHYSICS HOMEWORK SOLUTION #0 April 8, 203 0. Find the net torque on the wheel in the figure below about the axle through O, taking a = 6.0 cm and b = 30.0 cm. A torque that s produced by a force can be
PHYSICS HOMEWORK SOLUTION #0 April 8, 203 0. Find the net torque on the wheel in the figure below about the axle through O, taking a = 6.0 cm and b = 30.0 cm. A torque that s produced by a force can be
COMPLEX STRESS TUTORIAL 3 COMPLEX STRESS AND STRAIN
 COMPLX STRSS TUTORIAL COMPLX STRSS AND STRAIN This tutorial is not part of the decel unit mechanical Principles but covers elements of the following sllabi. o Parts of the ngineering Council eam subject
COMPLX STRSS TUTORIAL COMPLX STRSS AND STRAIN This tutorial is not part of the decel unit mechanical Principles but covers elements of the following sllabi. o Parts of the ngineering Council eam subject
6. Vectors. 1 2009-2016 Scott Surgent (surgent@asu.edu)
") 6. Vectors For purposes of applications in calculus and physics, a vector has both a direction and a magnitude (length), and is usually represented as an arrow. The start of the arrow is the vector s foot,
6. Vectors For purposes of applications in calculus and physics, a vector has both a direction and a magnitude (length), and is usually represented as an arrow. The start of the arrow is the vector s foot,
PHY231 Section 1, Form B March 22, 2012
 1. A car enters a horizontal, curved roadbed of radius 50 m. The coefficient of static friction between the tires and the roadbed is 0.20. What is the maximum speed with which the car can safely negotiate
1. A car enters a horizontal, curved roadbed of radius 50 m. The coefficient of static friction between the tires and the roadbed is 0.20. What is the maximum speed with which the car can safely negotiate
Lecture 17. Last time we saw that the rotational analog of Newton s 2nd Law is
 Lecture 17 Rotational Dynamics Rotational Kinetic Energy Stress and Strain and Springs Cutnell+Johnson: 9.4-9.6, 10.1-10.2 Rotational Dynamics (some more) Last time we saw that the rotational analog of
Lecture 17 Rotational Dynamics Rotational Kinetic Energy Stress and Strain and Springs Cutnell+Johnson: 9.4-9.6, 10.1-10.2 Rotational Dynamics (some more) Last time we saw that the rotational analog of
Slide 10.1. Basic system Models
 Slide 10.1 Basic system Models Objectives: Devise Models from basic building blocks of mechanical, electrical, fluid and thermal systems Recognize analogies between mechanical, electrical, fluid and thermal
Slide 10.1 Basic system Models Objectives: Devise Models from basic building blocks of mechanical, electrical, fluid and thermal systems Recognize analogies between mechanical, electrical, fluid and thermal
TORQUE AND FIRST-CLASS LEVERS
 TORQUE AND FIRST-CLASS LEVERS LAB MECH 28.COMP From Physics, Eugene Hecht and Physical Science with Computers, Vernier Software & Technology INTRODUCTION In Figure 1, note force F acting on a wrench along
TORQUE AND FIRST-CLASS LEVERS LAB MECH 28.COMP From Physics, Eugene Hecht and Physical Science with Computers, Vernier Software & Technology INTRODUCTION In Figure 1, note force F acting on a wrench along
Vector Algebra II: Scalar and Vector Products
 Chapter 2 Vector Algebra II: Scalar and Vector Products We saw in the previous chapter how vector quantities may be added and subtracted. In this chapter we consider the products of vectors and define
Chapter 2 Vector Algebra II: Scalar and Vector Products We saw in the previous chapter how vector quantities may be added and subtracted. In this chapter we consider the products of vectors and define
Columbia University Department of Physics QUALIFYING EXAMINATION
 Columbia University Department of Physics QUALIFYING EXAMINATION Monday, January 13, 2014 1:00PM to 3:00PM Classical Physics Section 1. Classical Mechanics Two hours are permitted for the completion of
Columbia University Department of Physics QUALIFYING EXAMINATION Monday, January 13, 2014 1:00PM to 3:00PM Classical Physics Section 1. Classical Mechanics Two hours are permitted for the completion of
The purposes of this experiment are to test Faraday's Law qualitatively and to test Lenz's Law.
 260 17-1 I. THEORY EXPERIMENT 17 QUALITATIVE STUDY OF INDUCED EMF Along the extended central axis of a bar magnet, the magnetic field vector B r, on the side nearer the North pole, points away from this
260 17-1 I. THEORY EXPERIMENT 17 QUALITATIVE STUDY OF INDUCED EMF Along the extended central axis of a bar magnet, the magnetic field vector B r, on the side nearer the North pole, points away from this
Chapter 6 Work and Energy
 Chapter 6 WORK AND ENERGY PREVIEW Work is the scalar product of the force acting on an object and the displacement through which it acts. When work is done on or by a system, the energy of that system
Chapter 6 WORK AND ENERGY PREVIEW Work is the scalar product of the force acting on an object and the displacement through which it acts. When work is done on or by a system, the energy of that system
Lecture L22-2D Rigid Body Dynamics: Work and Energy
 J. Peraire, S. Widnall 6.07 Dynamics Fall 008 Version.0 Lecture L - D Rigid Body Dynamics: Work and Energy In this lecture, we will revisit the principle of work and energy introduced in lecture L-3 for
J. Peraire, S. Widnall 6.07 Dynamics Fall 008 Version.0 Lecture L - D Rigid Body Dynamics: Work and Energy In this lecture, we will revisit the principle of work and energy introduced in lecture L-3 for
4.2 Free Body Diagrams
 CE297-FA09-Ch4 Page 1 Friday, September 18, 2009 12:11 AM Chapter 4: Equilibrium of Rigid Bodies A (rigid) body is said to in equilibrium if the vector sum of ALL forces and all their moments taken about
CE297-FA09-Ch4 Page 1 Friday, September 18, 2009 12:11 AM Chapter 4: Equilibrium of Rigid Bodies A (rigid) body is said to in equilibrium if the vector sum of ALL forces and all their moments taken about
STATICS. Introduction VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Introduction Lecture Notes: J. Walt Oler Texas Tech University Contents What is Mechanics? Fundamental
Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Introduction Lecture Notes: J. Walt Oler Texas Tech University Contents What is Mechanics? Fundamental
Vectors VECTOR PRODUCT. Graham S McDonald. A Tutorial Module for learning about the vector product of two vectors. Table of contents Begin Tutorial
 Vectors VECTOR PRODUCT Graham S McDonald A Tutorial Module for learning about the vector product of two vectors Table of contents Begin Tutorial c 2004 g.s.mcdonald@salford.ac.uk 1. Theory 2. Exercises
Vectors VECTOR PRODUCT Graham S McDonald A Tutorial Module for learning about the vector product of two vectors Table of contents Begin Tutorial c 2004 g.s.mcdonald@salford.ac.uk 1. Theory 2. Exercises
9.4. The Scalar Product. Introduction. Prerequisites. Learning Style. Learning Outcomes
 The Scalar Product 9.4 Introduction There are two kinds of multiplication involving vectors. The first is known as the scalar product or dot product. This is so-called because when the scalar product of
The Scalar Product 9.4 Introduction There are two kinds of multiplication involving vectors. The first is known as the scalar product or dot product. This is so-called because when the scalar product of
Force on Moving Charges in a Magnetic Field
 [ Assignment View ] [ Eðlisfræði 2, vor 2007 27. Magnetic Field and Magnetic Forces Assignment is due at 2:00am on Wednesday, February 28, 2007 Credit for problems submitted late will decrease to 0% after
[ Assignment View ] [ Eðlisfræði 2, vor 2007 27. Magnetic Field and Magnetic Forces Assignment is due at 2:00am on Wednesday, February 28, 2007 Credit for problems submitted late will decrease to 0% after
Chapter 11. h = 5m. = mgh + 1 2 mv 2 + 1 2 Iω 2. E f. = E i. v = 4 3 g(h h) = 4 3 9.8m / s2 (8m 5m) = 6.26m / s. ω = v r = 6.
 = 4 3 9.8m / s2 (8m 5m) = 6.26m / s. ω = v r = 6.") Chapter 11 11.7 A solid cylinder of radius 10cm and mass 1kg starts from rest and rolls without slipping a distance of 6m down a house roof that is inclined at 30 degrees (a) What is the angular speed
Chapter 11 11.7 A solid cylinder of radius 10cm and mass 1kg starts from rest and rolls without slipping a distance of 6m down a house roof that is inclined at 30 degrees (a) What is the angular speed
Angular acceleration α
 Angular Acceleration Angular acceleration α measures how rapidly the angular velocity is changing: Slide 7-0 Linear and Circular Motion Compared Slide 7- Linear and Circular Kinematics Compared Slide 7-
Angular Acceleration Angular acceleration α measures how rapidly the angular velocity is changing: Slide 7-0 Linear and Circular Motion Compared Slide 7- Linear and Circular Kinematics Compared Slide 7-
Acceleration due to Gravity
 Acceleration due to Gravity 1 Object To determine the acceleration due to gravity by different methods. 2 Apparatus Balance, ball bearing, clamps, electric timers, meter stick, paper strips, precision
Acceleration due to Gravity 1 Object To determine the acceleration due to gravity by different methods. 2 Apparatus Balance, ball bearing, clamps, electric timers, meter stick, paper strips, precision
Rotational Inertia Demonstrator
 WWW.ARBORSCI.COM Rotational Inertia Demonstrator P3-3545 BACKGROUND: The Rotational Inertia Demonstrator provides an engaging way to investigate many of the principles of angular motion and is intended
WWW.ARBORSCI.COM Rotational Inertia Demonstrator P3-3545 BACKGROUND: The Rotational Inertia Demonstrator provides an engaging way to investigate many of the principles of angular motion and is intended
Physics 41 HW Set 1 Chapter 15
 Physics 4 HW Set Chapter 5 Serway 8 th OC:, 4, 7 CQ: 4, 8 P: 4, 5, 8, 8, 0, 9,, 4, 9, 4, 5, 5 Discussion Problems:, 57, 59, 67, 74 OC CQ P: 4, 5, 8, 8, 0, 9,, 4, 9, 4, 5, 5 Discussion Problems:, 57, 59,
Physics 4 HW Set Chapter 5 Serway 8 th OC:, 4, 7 CQ: 4, 8 P: 4, 5, 8, 8, 0, 9,, 4, 9, 4, 5, 5 Discussion Problems:, 57, 59, 67, 74 OC CQ P: 4, 5, 8, 8, 0, 9,, 4, 9, 4, 5, 5 Discussion Problems:, 57, 59,
Copyright 2011 Casa Software Ltd. www.casaxps.com. Centre of Mass
 Centre of Mass A central theme in mathematical modelling is that of reducing complex problems to simpler, and hopefully, equivalent problems for which mathematical analysis is possible. The concept of
Centre of Mass A central theme in mathematical modelling is that of reducing complex problems to simpler, and hopefully, equivalent problems for which mathematical analysis is possible. The concept of
Physics 121 Sample Common Exam 3 NOTE: ANSWERS ARE ON PAGE 6. Instructions: 1. In the formula F = qvxb:
 Physics 121 Sample Common Exam 3 NOTE: ANSWERS ARE ON PAGE 6 Signature Name (Print): 4 Digit ID: Section: Instructions: Answer all questions 24 multiple choice questions. You may need to do some calculation.
Physics 121 Sample Common Exam 3 NOTE: ANSWERS ARE ON PAGE 6 Signature Name (Print): 4 Digit ID: Section: Instructions: Answer all questions 24 multiple choice questions. You may need to do some calculation.
Chapter 6 Circular Motion
 Chapter 6 Circular Motion 6.1 Introduction... 1 6.2 Cylindrical Coordinate System... 2 6.2.1 Unit Vectors... 3 6.2.2 Infinitesimal Line, Area, and Volume Elements in Cylindrical Coordinates... 4 Example
Chapter 6 Circular Motion 6.1 Introduction... 1 6.2 Cylindrical Coordinate System... 2 6.2.1 Unit Vectors... 3 6.2.2 Infinitesimal Line, Area, and Volume Elements in Cylindrical Coordinates... 4 Example
Physics Midterm Review Packet January 2010
 Physics Midterm Review Packet January 2010 This Packet is a Study Guide, not a replacement for studying from your notes, tests, quizzes, and textbook. Midterm Date: Thursday, January 28 th 8:15-10:15 Room:
Physics Midterm Review Packet January 2010 This Packet is a Study Guide, not a replacement for studying from your notes, tests, quizzes, and textbook. Midterm Date: Thursday, January 28 th 8:15-10:15 Room:
There are four types of friction, they are 1).Static friction 2) Dynamic friction 3) Sliding friction 4) Rolling friction
.Static friction 2) Dynamic friction 3) Sliding friction 4) Rolling friction") 2.3 RICTION The property by virtue of which a resisting force is created between two rough bodies that resists the sliding of one body over the other is known as friction. The force that always opposes
2.3 RICTION The property by virtue of which a resisting force is created between two rough bodies that resists the sliding of one body over the other is known as friction. The force that always opposes
Objective: Equilibrium Applications of Newton s Laws of Motion I
 Type: Single Date: Objective: Equilibrium Applications of Newton s Laws of Motion I Homework: Assignment (1-11) Read (4.1-4.5, 4.8, 4.11); Do PROB # s (46, 47, 52, 58) Ch. 4 AP Physics B Mr. Mirro Equilibrium,
Type: Single Date: Objective: Equilibrium Applications of Newton s Laws of Motion I Homework: Assignment (1-11) Read (4.1-4.5, 4.8, 4.11); Do PROB # s (46, 47, 52, 58) Ch. 4 AP Physics B Mr. Mirro Equilibrium,
APPLIED MATHEMATICS ADVANCED LEVEL
 APPLIED MATHEMATICS ADVANCED LEVEL INTRODUCTION This syllabus serves to examine candidates knowledge and skills in introductory mathematical and statistical methods, and their applications. For applications
APPLIED MATHEMATICS ADVANCED LEVEL INTRODUCTION This syllabus serves to examine candidates knowledge and skills in introductory mathematical and statistical methods, and their applications. For applications
Physics 40 Lab 1: Tests of Newton s Second Law
 Physics 40 Lab 1: Tests of Newton s Second Law January 28 th, 2008, Section 2 Lynda Williams Lab Partners: Madonna, Hilary Clinton & Angie Jolie Abstract Our primary objective was to test the validity
Physics 40 Lab 1: Tests of Newton s Second Law January 28 th, 2008, Section 2 Lynda Williams Lab Partners: Madonna, Hilary Clinton & Angie Jolie Abstract Our primary objective was to test the validity