CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation. Prof. Dr. Hani Hagras
|
|
|
- Silvia Norton
- 10 years ago
- Views:
Transcription
1 1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras

2 Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the mechanisms for locomotion has equivalent in nature One important exception: the powered wheel! Biological energy storage and the muscular and hydraulic activation systems much better than man-made systems

3 Wheeled Locomotion: Car-like drive Car-like drive Two motors: one to drive, one to steer. 3


4 Wheeled Locomotion: Differential Drive 4 Two motors, one per wheel Wheels run at equal speeds for straight-line motion Wheels run at equal and opposite speeds to turn on the spot Other combinations of speeds lead to motion in a circular arc


5 Synchro drive One motor for translation, One motor for rotation Wheels mechanically coupled Turns without turning body For example Nomad200 robot 5

6 Skid-steer Drive More common for outdoor platforms Wheels or tracks Turn by applying different speed to wheels Skidding makes it hard to predict motion Extremely energy inefficient when friction is high 6

7 Exotic Wheeled Robots Segway platform with dynamic balance gives good height with small footprint and high acceleration Mars Rover has wheels on stalks to tackle large obstacles A robot with several omni-directional wheels on axles at angles can travel in any instantaneous direction (holonomic) 7

8 Non-holonomic constraint A vehicle is holonomic if the number of local degrees of freedom of movement equals the number of global degrees of freedom. A car is non-holonomic: the global degrees of freedom are motion in x,y and heading. However locally, a car can only move forward or turn. It cannot slide sideways. 8

9 Legged Locomotion Need at least 2 DOF to move leg forward Lift Swing Gait = sequence of lift and release events for the individual legs Robot legs often have 3 joints A fourth ankle joint can improve walking More DOFs increase complexity, weight and power requirements Human leg has more than 7 DOFs plus toes 9

10 Need to hop to move One Leg Robots Could in principle handle quite rough terrain Balance is the major challenge Static stability not possible The Raibert hopper from MIT Springs can capture kinetic energy and help increase efficiency 10

11 Biped Walking Biped walking can be approximated by a rolling polygon Smaller steps gives closer to rolling circle 11

12 Four Legged Robots (Quadrupeds) Can be statically stable when standing still Walking still challenging Example Sony Aibo, BigDog 12

13 Electronic actuators Hydraulic actuator Pneumatic actuators Air Muscle Actuators Shadow Hand by the Shadow Robot Company, London Actuated using air muscles (most joints have an opposite pair) 13

14 Electric Actuators 14
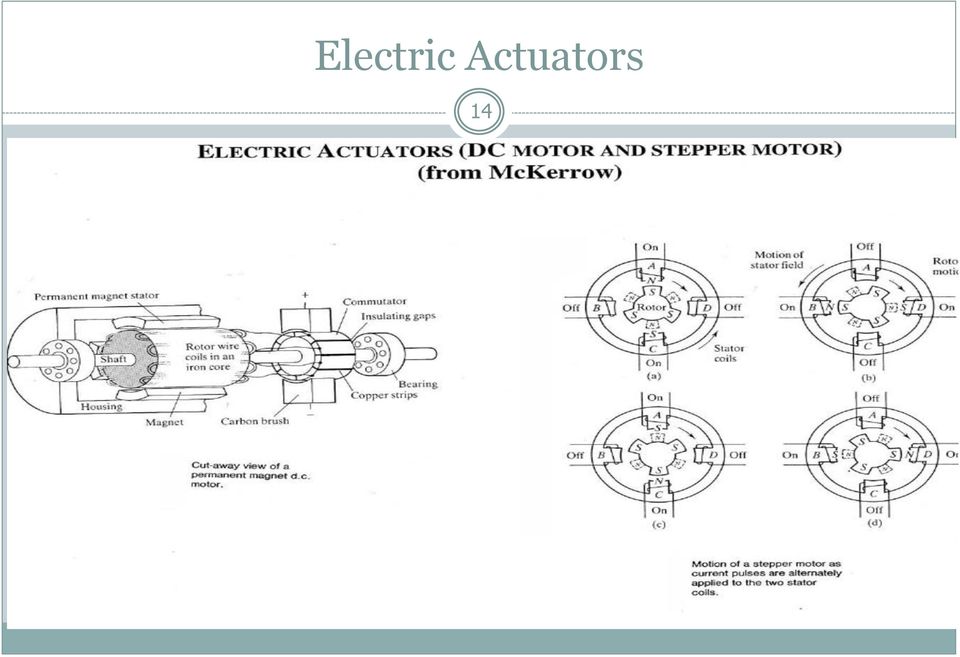
15 DC Motors Electric Actuators Most common motors, available in all sizes and types Simple control with voltage or pulse width modulation Advanced control with encoder and feedback Step Motors 15 Motion in precise increments controlled by electrical pulses Used when open-loop precise is required and desired torque is small (printers, disk drives)

16 Disadvantages Electric Actuators Inherently high speed with low torque, hence gear trains or power transmission units are needed 16 Gear backlash limits precision Electrical arcing may be a consideration in flammable atmospheres Problems of overheating in stalled condition Brakes are needed to lock them in position

17 Localisation 17 Autonomous robots are equipped with various sensors to see" the environment where they are committed to operate. One of the fundamental problems for autonomous operations is to find its location information. For ground mobile robots, the information includes a 2D coordinate (x; y) and an orientation (heading). Often the location information is called robot pose. For flying robots and underwater robots, a robot pose consists of 3D coordinate (x; y; z) and three angles around three axes. The localization problem, well known as a question Where am I?" in robotics, is stated as given the map of the environment and sensor's readings, to find out the pose of the robot.
 and three angles around three axes.")
18 Localisation 18 For outdoor environments, although the GPS can provide the global coordination, the accuracy is questionable for some tasks. For indoor environments, the GPS signal is not accurate or even not available. The on-board sensor based approaches are a key technique for localization, which is targeted by robotic research community for many years.

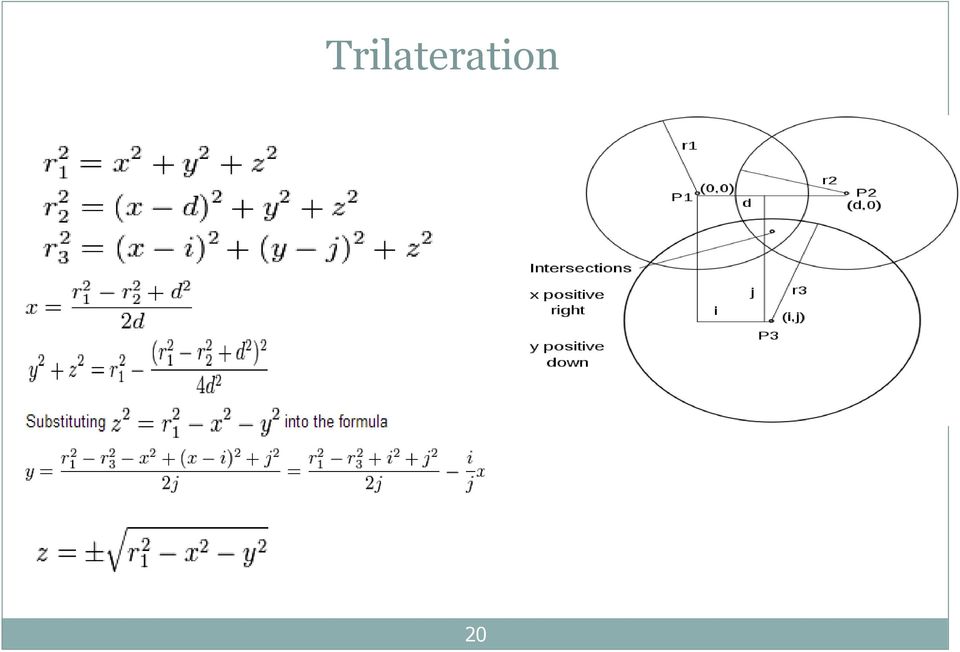
19 Triangulation and Trilateration The straightforward way for localization is the triangulation or trilateration methods in geometry. The triangulation is the process of determining the location of a point by measuring angles to it from known points. The trilateration is the process of determining the location of a point by measuring distances to it from known points. For 2D cases, the location of a point is calculated when the angle (or distance) measurements from three different beacons are known. 19
 measurements from three different beacons are")
20 Trilateration 20

21 Triangulation 21
22 Measurement Noise 22 The localization results of the triangulation or trilateration methods are very sensitive to the noise in angle or distance measurements. The localization performance is not ideal for robot navigation. Mobile phone uses the trilateration method to provide the locating service. It does not measure the distance, but RSS (received signal strength) which is converted into distance value. Even worse, the three angle or distance measurements are not obtained simultaneously as the robot moves forward. The time compensation in the triangulation or trilateration methods has been developed, but the performance is still not satisfactory. Handling the noise in angle/distance measurements or any other sensory measurements leads to various probability based approaches. Kalman filter is a known probability based approach to deal with noise
23 Kalman Filter Kalman filter is a powerful tool in dealing with noise in the sensory measurements. 23 Kalman filter for robot localization has been successfully developed for many years The Kalman filter is an efficient recursive filter that estimates the state of a dynamic system from a series of noisy measurements.
24 KF Conceptual Overview To simplify the presentation, a one dimensional case is chosen to illustrate how to use KF for localization. The robot true position is x k at time step k, which we don't know and we want to estimate. The robot moves along the x direction with a dynamic state equation: 24 w k is a Gaussian noise with zero mean and variance q, representing the movement uncertainty. Assume the robot has a GPS device and it provides the noisy measurement z k at time step k. The measurement equation is: v k is a Gaussian noise with zero mean and variance r, representing the measurement noise.
Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots
![Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots](/thumbs/27/11692183.jpg "Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots") Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Path Tracking for a Miniature Robot
 Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
Improved Mecanum Wheel Design for Omni-directional Robots
 Proc. 2002 Australasian Conference on Robotics and Automation Auckland, 27-29 November 2002 Improved Mecanum Wheel Design for Omni-directional Robots Olaf Diegel, Aparna Badve, Glen Bright, Johan Potgieter,
Proc. 2002 Australasian Conference on Robotics and Automation Auckland, 27-29 November 2002 Improved Mecanum Wheel Design for Omni-directional Robots Olaf Diegel, Aparna Badve, Glen Bright, Johan Potgieter,
Robotics. Lecture 3: Sensors. See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information.
 Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
E190Q Lecture 5 Autonomous Robot Navigation
 E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
Onboard electronics of UAVs
 AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
UNIT II Robots Drive Systems and End Effectors Part-A Questions
 UNIT II Robots Drive Systems and End Effectors Part-A Questions 1. Define End effector. End effector is a device that is attached to the end of the wrist arm to perform specific task. 2. Give some examples
UNIT II Robots Drive Systems and End Effectors Part-A Questions 1. Define End effector. End effector is a device that is attached to the end of the wrist arm to perform specific task. 2. Give some examples
Principles of robot locomotion
 Principles of robot locomotion Sven Böttcher Seminar Human robot interaction Index of contents 1. Introduction...1 2. Legged Locomotion...2 2.1 Stability...3 2.2 Leg configuration...4 2.3 One leg...5 2.4
Principles of robot locomotion Sven Böttcher Seminar Human robot interaction Index of contents 1. Introduction...1 2. Legged Locomotion...2 2.1 Stability...3 2.2 Leg configuration...4 2.3 One leg...5 2.4
FRC WPI Robotics Library Overview
 FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
Mobile Robotics I: Lab 2 Dead Reckoning: Autonomous Locomotion Using Odometry
 Mobile Robotics I: Lab 2 Dead Reckoning: Autonomous Locomotion Using Odometry CEENBoT Mobile Robotics Platform Laboratory Series CEENBoT v2.21 '324 Platform The Peter Kiewit Institute of Information Science
Mobile Robotics I: Lab 2 Dead Reckoning: Autonomous Locomotion Using Odometry CEENBoT Mobile Robotics Platform Laboratory Series CEENBoT v2.21 '324 Platform The Peter Kiewit Institute of Information Science
Mobile robots. Structure of this lecture. Section A: Introduction to AGV: mobile robots. Section B: Design of the ShAPE mobile robot
 slide n. 1 Mobile robots Development of the ShAPE mobile robot Ing. A.Tasora Dipartimento di Ingegneria Industriale Università di Parma, Italy [email protected] slide n. 2 Structure of this lecture Section
slide n. 1 Mobile robots Development of the ShAPE mobile robot Ing. A.Tasora Dipartimento di Ingegneria Industriale Università di Parma, Italy [email protected] slide n. 2 Structure of this lecture Section
Longitudinal and lateral dynamics
 Longitudinal and lateral dynamics Lecturer dr. Arunas Tautkus Kaunas University of technology Powering the Future With Zero Emission and Human Powered Vehicles Terrassa 2011 1 Content of lecture Basic
Longitudinal and lateral dynamics Lecturer dr. Arunas Tautkus Kaunas University of technology Powering the Future With Zero Emission and Human Powered Vehicles Terrassa 2011 1 Content of lecture Basic
Static Environment Recognition Using Omni-camera from a Moving Vehicle
 Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Lecture 07: Work and Kinetic Energy. Physics 2210 Fall Semester 2014
 Lecture 07: Work and Kinetic Energy Physics 2210 Fall Semester 2014 Announcements Schedule next few weeks: 9/08 Unit 3 9/10 Unit 4 9/15 Unit 5 (guest lecturer) 9/17 Unit 6 (guest lecturer) 9/22 Unit 7,
Lecture 07: Work and Kinetic Energy Physics 2210 Fall Semester 2014 Announcements Schedule next few weeks: 9/08 Unit 3 9/10 Unit 4 9/15 Unit 5 (guest lecturer) 9/17 Unit 6 (guest lecturer) 9/22 Unit 7,
Name: Partners: Period: Coaster Option: 1. In the space below, make a sketch of your roller coaster.
 1. In the space below, make a sketch of your roller coaster. 2. On your sketch, label different areas of acceleration. Put a next to an area of negative acceleration, a + next to an area of positive acceleration,
1. In the space below, make a sketch of your roller coaster. 2. On your sketch, label different areas of acceleration. Put a next to an area of negative acceleration, a + next to an area of positive acceleration,
MSc in Autonomous Robotics Engineering University of York
 MSc in Autonomous Robotics Engineering University of York Practical Robotics Module 2015 A Mobile Robot Navigation System: Labs 1a, 1b, 2a, 2b. Associated lectures: Lecture 1 and lecture 2, given by Nick
MSc in Autonomous Robotics Engineering University of York Practical Robotics Module 2015 A Mobile Robot Navigation System: Labs 1a, 1b, 2a, 2b. Associated lectures: Lecture 1 and lecture 2, given by Nick
Robotics & Automation
 Robotics & Automation Levels: Grades 10-12 Units of Credit: 1.0 CIP Code: 21.0117 Core Code: 38-01-00-00-130 Prerequisite: None Skill Test: 612 COURSE DESCRIPTION Robotics & Automation is a lab-based,
Robotics & Automation Levels: Grades 10-12 Units of Credit: 1.0 CIP Code: 21.0117 Core Code: 38-01-00-00-130 Prerequisite: None Skill Test: 612 COURSE DESCRIPTION Robotics & Automation is a lab-based,
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
Robotics and Automation Blueprint
 Robotics and Automation Blueprint This Blueprint contains the subject matter content of this Skill Connect Assessment. This Blueprint does NOT contain the information one would need to fully prepare for
Robotics and Automation Blueprint This Blueprint contains the subject matter content of this Skill Connect Assessment. This Blueprint does NOT contain the information one would need to fully prepare for
Gear Trains. Introduction:
 Gear Trains Introduction: Sometimes, two or more gears are made to mesh with each other to transmit power from one shaft to another. Such a combination is called gear train or train of toothed wheels.
Gear Trains Introduction: Sometimes, two or more gears are made to mesh with each other to transmit power from one shaft to another. Such a combination is called gear train or train of toothed wheels.
Field and Service Robotics. Odometry sensors
 Field and Service Robotics Odometry sensors Navigation (internal) Sensors To sense robot s own state Magnetic compass (absolute heading) Gyro (angular speed => change of heading) Acceleration sensors (acceleration)
Field and Service Robotics Odometry sensors Navigation (internal) Sensors To sense robot s own state Magnetic compass (absolute heading) Gyro (angular speed => change of heading) Acceleration sensors (acceleration)
E/ECE/324/Rev.1/Add.12/Rev.7/Amend.4 E/ECE/TRANS/505/Rev.1/Add.12/Rev.7/Amend.4
 6 December 2012 Agreement Concerning the adoption of uniform technical prescriptions for wheeled vehicles, equipment and parts which can be fitted and/or be used on wheeled vehicles and the conditions
6 December 2012 Agreement Concerning the adoption of uniform technical prescriptions for wheeled vehicles, equipment and parts which can be fitted and/or be used on wheeled vehicles and the conditions
Industrial Robotics. Training Objective
 Training Objective After watching the program and reviewing this printed material, the viewer will learn the basics of industrial robot technology and how robots are used in a variety of manufacturing
Training Objective After watching the program and reviewing this printed material, the viewer will learn the basics of industrial robot technology and how robots are used in a variety of manufacturing
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku
 Saeed B. Niku 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik GmbH. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.
Saeed B. Niku 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik GmbH. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.
1. SYSTEM OVERVIEW. 1) Basic Theory of ABS Function 10-3 4891-01
 Basic Theory of ABS Function 10-3 4891-01") 10-3 1. SYSTEM OVERVIEW When braking suddenly or braking on slippery roads, the vehicle keeps moving forward but the wheels are locking and not rotating. If these happen, the vehicle may lose stability
10-3 1. SYSTEM OVERVIEW When braking suddenly or braking on slippery roads, the vehicle keeps moving forward but the wheels are locking and not rotating. If these happen, the vehicle may lose stability
Artificial Intelligence
 Artificial Intelligence Robotics RWTH Aachen 1 Term and History Term comes from Karel Capek s play R.U.R. Rossum s universal robots Robots comes from the Czech word for corvee Manipulators first start
Artificial Intelligence Robotics RWTH Aachen 1 Term and History Term comes from Karel Capek s play R.U.R. Rossum s universal robots Robots comes from the Czech word for corvee Manipulators first start
CNC HARDWARE & TOOLING BASICS
 Computer Aided Manufacturing (CAM) CNC HARDWARE & TOOLING BASICS Assoc. Prof. Dr. Tamer S. Mahmoud 1. Parts of CNC Machine Tools Any CNC machine tool essentially consists of the following parts: Part Program,
Computer Aided Manufacturing (CAM) CNC HARDWARE & TOOLING BASICS Assoc. Prof. Dr. Tamer S. Mahmoud 1. Parts of CNC Machine Tools Any CNC machine tool essentially consists of the following parts: Part Program,
Force/position control of a robotic system for transcranial magnetic stimulation
 Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS
 TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS BY MARTIN WAGENER APPLICATIONS ENGINEER, TRIMBLE EUROPE OVERVIEW Today s construction industry demands more
TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS BY MARTIN WAGENER APPLICATIONS ENGINEER, TRIMBLE EUROPE OVERVIEW Today s construction industry demands more
Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors
 Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
- 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering
 - 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering Fall 2005 1 Chapter 1 Introduction Many definitions have been suggested for what we call a robot. The word may conjure up
- 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering Fall 2005 1 Chapter 1 Introduction Many definitions have been suggested for what we call a robot. The word may conjure up
Mobile Robot FastSLAM with Xbox Kinect
 Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
This week. CENG 732 Computer Animation. Challenges in Human Modeling. Basic Arm Model
 CENG 732 Computer Animation Spring 2006-2007 Week 8 Modeling and Animating Articulated Figures: Modeling the Arm, Walking, Facial Animation This week Modeling the arm Different joint structures Walking
CENG 732 Computer Animation Spring 2006-2007 Week 8 Modeling and Animating Articulated Figures: Modeling the Arm, Walking, Facial Animation This week Modeling the arm Different joint structures Walking
Equivalent Spring Stiffness
 Module 7 : Free Undamped Vibration of Single Degree of Freedom Systems; Determination of Natural Frequency ; Equivalent Inertia and Stiffness; Energy Method; Phase Plane Representation. Lecture 13 : Equivalent
Module 7 : Free Undamped Vibration of Single Degree of Freedom Systems; Determination of Natural Frequency ; Equivalent Inertia and Stiffness; Energy Method; Phase Plane Representation. Lecture 13 : Equivalent
What is Camber, Castor and Toe?
 What is Camber, Castor and Toe? Camber is probably the most familiar suspension term to owners. It is the angle of the wheels relative to the surface of the road, looking at the car from the front or rear.
What is Camber, Castor and Toe? Camber is probably the most familiar suspension term to owners. It is the angle of the wheels relative to the surface of the road, looking at the car from the front or rear.
Sensor Based Control of Autonomous Wheeled Mobile Robots
 Sensor Based Control of Autonomous Wheeled Mobile Robots Gyula Mester University of Szeged, Department of Informatics e-mail: [email protected] Abstract The paper deals with the wireless sensor-based
Sensor Based Control of Autonomous Wheeled Mobile Robots Gyula Mester University of Szeged, Department of Informatics e-mail: [email protected] Abstract The paper deals with the wireless sensor-based
Choosing Between Electromechanical and Fluid Power Linear Actuators in Industrial Systems Design
 Choosing Between Electromechanical and Fluid Power Linear Actuators in Industrial Systems Design James Marek, Business Unit Director, Thomson Systems Thomson Industries, Inc. 540-633-3549 www.thomsonlinear.com
Choosing Between Electromechanical and Fluid Power Linear Actuators in Industrial Systems Design James Marek, Business Unit Director, Thomson Systems Thomson Industries, Inc. 540-633-3549 www.thomsonlinear.com
MECE 102 Mechatronics Engineering Orientation
 MECE 102 Mechatronics Engineering Orientation Mechatronic System Components Associate Prof. Dr. of Mechatronics Engineering Çankaya University Compulsory Course in Mechatronics Engineering Credits (2/0/2)
MECE 102 Mechatronics Engineering Orientation Mechatronic System Components Associate Prof. Dr. of Mechatronics Engineering Çankaya University Compulsory Course in Mechatronics Engineering Credits (2/0/2)
To help avoid personal injury due to poor braking. DO NOT Tap into the vehicle's brake system to operate a trailer brake system.
 489201 133 ANTIBRAKE SYSTEM GENERAL 489201 1. REPAIR INSTRUCTIONS 1) ONVEHICLE SERVICE (1) Service Precautions Brake Fluid may irritate eyes and skin. In case of contact, take the following actions: Eye
489201 133 ANTIBRAKE SYSTEM GENERAL 489201 1. REPAIR INSTRUCTIONS 1) ONVEHICLE SERVICE (1) Service Precautions Brake Fluid may irritate eyes and skin. In case of contact, take the following actions: Eye
Hand Gestures Remote Controlled Robotic Arm
 Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 601-606 Research India Publications http://www.ripublication.com/aeee.htm Hand Gestures Remote Controlled
Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 601-606 Research India Publications http://www.ripublication.com/aeee.htm Hand Gestures Remote Controlled
Three Channel Optical Incremental Encoder Modules Technical Data
 Three Channel Optical Incremental Encoder Modules Technical Data HEDS-9040 HEDS-9140 Features Two Channel Quadrature Output with Index Pulse Resolution Up to 2000 CPR Counts Per Revolution Low Cost Easy
Three Channel Optical Incremental Encoder Modules Technical Data HEDS-9040 HEDS-9140 Features Two Channel Quadrature Output with Index Pulse Resolution Up to 2000 CPR Counts Per Revolution Low Cost Easy
EVALUAT ING ACADEMIC READINESS FOR APPRENTICESHIP TRAINING Revised for ACCESS TO APPRENTICESHIP
 EVALUAT ING ACADEMIC READINESS FOR APPRENTICESHIP TRAINING for ACCESS TO APPRENTICESHIP SCIENCE SKILLS SIMPLE MACHINES & MECHANICAL ADVANTAGE AN ACADEMIC SKILLS MANUAL for The Construction Trades: Mechanical
EVALUAT ING ACADEMIC READINESS FOR APPRENTICESHIP TRAINING for ACCESS TO APPRENTICESHIP SCIENCE SKILLS SIMPLE MACHINES & MECHANICAL ADVANTAGE AN ACADEMIC SKILLS MANUAL for The Construction Trades: Mechanical
EDUMECH Mechatronic Instructional Systems. Ball on Beam System
 EDUMECH Mechatronic Instructional Systems Ball on Beam System Product of Shandor Motion Systems Written by Robert Hirsch Ph.D. 998-9 All Rights Reserved. 999 Shandor Motion Systems, Ball on Beam Instructional
EDUMECH Mechatronic Instructional Systems Ball on Beam System Product of Shandor Motion Systems Written by Robert Hirsch Ph.D. 998-9 All Rights Reserved. 999 Shandor Motion Systems, Ball on Beam Instructional
M.S Ramaiah School of Advanced Studies - Bangalore. On completion of this session, the delegate will understand and be able to appriciate:
 Transmission Control Lecture delivered by: Prof. Ashok C.Meti MSRSAS-Bangalore 1 Session Objectives On completion of this session, the delegate will understand and be able to appriciate: Rl Role of electronic
Transmission Control Lecture delivered by: Prof. Ashok C.Meti MSRSAS-Bangalore 1 Session Objectives On completion of this session, the delegate will understand and be able to appriciate: Rl Role of electronic
TOYOTA ELECTRONIC CONTROL TRANSMISSION
 Electronic Control Transmission (ECT) The Electronic Control Transmission is an automatic transmission which uses modern electronic control technologies to control the transmission. The transmission itself,
Electronic Control Transmission (ECT) The Electronic Control Transmission is an automatic transmission which uses modern electronic control technologies to control the transmission. The transmission itself,
Servo Info and Centering
 Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
AP Physics Circular Motion Practice Test B,B,B,A,D,D,C,B,D,B,E,E,E, 14. 6.6m/s, 0.4 N, 1.5 m, 6.3m/s, 15. 12.9 m/s, 22.9 m/s
 AP Physics Circular Motion Practice Test B,B,B,A,D,D,C,B,D,B,E,E,E, 14. 6.6m/s, 0.4 N, 1.5 m, 6.3m/s, 15. 12.9 m/s, 22.9 m/s Answer the multiple choice questions (2 Points Each) on this sheet with capital
AP Physics Circular Motion Practice Test B,B,B,A,D,D,C,B,D,B,E,E,E, 14. 6.6m/s, 0.4 N, 1.5 m, 6.3m/s, 15. 12.9 m/s, 22.9 m/s Answer the multiple choice questions (2 Points Each) on this sheet with capital
The Effects of Wheelbase and Track on Vehicle Dynamics. Automotive vehicles move by delivering rotational forces from the engine to
 The Effects of Wheelbase and Track on Vehicle Dynamics Automotive vehicles move by delivering rotational forces from the engine to wheels. The wheels push in the opposite direction of the motion of the
The Effects of Wheelbase and Track on Vehicle Dynamics Automotive vehicles move by delivering rotational forces from the engine to wheels. The wheels push in the opposite direction of the motion of the
Active Vibration Isolation of an Unbalanced Machine Spindle
 UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
Robot Navigation. Johannes Maurer, Institute for Software Technology TEDUSAR Summerschool 2014. u www.tugraz.at
 1 Robot Navigation u www.tugraz.at 2 Motivation challenges physical laws e.g. inertia, acceleration uncertainty e.g. maps, observations geometric constraints e.g. shape of a robot dynamic environment e.g.
1 Robot Navigation u www.tugraz.at 2 Motivation challenges physical laws e.g. inertia, acceleration uncertainty e.g. maps, observations geometric constraints e.g. shape of a robot dynamic environment e.g.
Thermodynamic efficiency of an actuator that provides the mechanical movement for the driven equipments:
 1. Introduction 1.1. Industry Automation Industry automation is the term that describes a vital development programme of a production community where the project engineers build up automated manufacturing
1. Introduction 1.1. Industry Automation Industry automation is the term that describes a vital development programme of a production community where the project engineers build up automated manufacturing
Slide 10.1. Basic system Models
 Slide 10.1 Basic system Models Objectives: Devise Models from basic building blocks of mechanical, electrical, fluid and thermal systems Recognize analogies between mechanical, electrical, fluid and thermal
Slide 10.1 Basic system Models Objectives: Devise Models from basic building blocks of mechanical, electrical, fluid and thermal systems Recognize analogies between mechanical, electrical, fluid and thermal
Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and Motion Optimization for Maritime Robotic Research
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and
Design of a Robotic Arm with Gripper & End Effector for Spot Welding
 Universal Journal of Mechanical Engineering 1(3): 92-97, 2013 DOI: 10.13189/ujme.2013.010303 http://www.hrpub.org Design of a Robotic Arm with Gripper & End Effector for Spot Welding Puran Singh *, Anil
Universal Journal of Mechanical Engineering 1(3): 92-97, 2013 DOI: 10.13189/ujme.2013.010303 http://www.hrpub.org Design of a Robotic Arm with Gripper & End Effector for Spot Welding Puran Singh *, Anil
Design Aspects of Robot Manipulators
 Design Aspects of Robot Manipulators Dr. Rohan Munasinghe Dept of Electronic and Telecommunication Engineering University of Moratuwa System elements Manipulator (+ proprioceptive sensors) End-effector
Design Aspects of Robot Manipulators Dr. Rohan Munasinghe Dept of Electronic and Telecommunication Engineering University of Moratuwa System elements Manipulator (+ proprioceptive sensors) End-effector
Power Electronics. Prof. K. Gopakumar. Centre for Electronics Design and Technology. Indian Institute of Science, Bangalore.
 Power Electronics Prof. K. Gopakumar Centre for Electronics Design and Technology Indian Institute of Science, Bangalore Lecture - 1 Electric Drive Today, we will start with the topic on industrial drive
Power Electronics Prof. K. Gopakumar Centre for Electronics Design and Technology Indian Institute of Science, Bangalore Lecture - 1 Electric Drive Today, we will start with the topic on industrial drive
Dynamics of Rotational Motion
 Chapter 10 Dynamics of Rotational Motion PowerPoint Lectures for University Physics, Twelfth Edition Hugh D. Young and Roger A. Freedman Lectures by James Pazun Modified by P. Lam 5_31_2012 Goals for Chapter
Chapter 10 Dynamics of Rotational Motion PowerPoint Lectures for University Physics, Twelfth Edition Hugh D. Young and Roger A. Freedman Lectures by James Pazun Modified by P. Lam 5_31_2012 Goals for Chapter
Understanding and Applying Kalman Filtering
 Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Rotation: Moment of Inertia and Torque
 Rotation: Moment of Inertia and Torque Every time we push a door open or tighten a bolt using a wrench, we apply a force that results in a rotational motion about a fixed axis. Through experience we learn
Rotation: Moment of Inertia and Torque Every time we push a door open or tighten a bolt using a wrench, we apply a force that results in a rotational motion about a fixed axis. Through experience we learn
ANTI LOCK BRAKING SYSTEM MODELLING AND DEVELOPMENT
 ANTI LOCK BRAKING SYSTEM MODELLING AND DEVELOPMENT Aldi Manikanth ME10B004 A Manoj Kumar ME10B006 C Vijay Chauhan ME10B010 Nachiket Dongre ME10B013 Lithas ME10B020 Rajesh Kumar Meena ME10B030 Varada Karthik
ANTI LOCK BRAKING SYSTEM MODELLING AND DEVELOPMENT Aldi Manikanth ME10B004 A Manoj Kumar ME10B006 C Vijay Chauhan ME10B010 Nachiket Dongre ME10B013 Lithas ME10B020 Rajesh Kumar Meena ME10B030 Varada Karthik
Robot coined by Karel Capek in a 1921 science-fiction Czech play
 Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Introduction to Robotics Analysis, Systems, Applications
 Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
Interactive Computer Graphics
 Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
How To Model A Hexapod Robot With Six Legs
 Thiago Augusto Ferreira 1, Armando Carlos de Pina Filho 2, Aloísio Carlos de Pina 3 1 Universidade Federal do Rio de Janeiro, Mechanical Engineering Department, Polytechnic School, Rio de Janeiro - RJ,
Thiago Augusto Ferreira 1, Armando Carlos de Pina Filho 2, Aloísio Carlos de Pina 3 1 Universidade Federal do Rio de Janeiro, Mechanical Engineering Department, Polytechnic School, Rio de Janeiro - RJ,
2. Dynamics, Control and Trajectory Following
 2. Dynamics, Control and Trajectory Following This module Flying vehicles: how do they work? Quick refresher on aircraft dynamics with reference to the magical flying space potato How I learned to stop
2. Dynamics, Control and Trajectory Following This module Flying vehicles: how do they work? Quick refresher on aircraft dynamics with reference to the magical flying space potato How I learned to stop
Lecture 3: Teleoperation
 ME 328: Medical Robotics Spring 2015 Lecture 3: Teleoperation Allison Okamura Stanford University Announcements 1. I am not Allison. 2. You re a huge class. So, we found a 2nd CA! meet Jeesu Baek [email protected]
ME 328: Medical Robotics Spring 2015 Lecture 3: Teleoperation Allison Okamura Stanford University Announcements 1. I am not Allison. 2. You re a huge class. So, we found a 2nd CA! meet Jeesu Baek [email protected]
2/26/2008. Sensors For Robotics. What is sensing? Why do robots need sensors? What is the angle of my arm? internal information
 Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Chapter 4 DEFENSIVE DRIVING
 Chapter 4 DEFENSIVE DRIVING Chapter 4 Table of Contents Chapter 4 DEFENSIVE DRIVING... 4-1 DEFENSIVE DRIVING... 4-3 Positioning The Bus... 4-3 When Making a Turn at an Intersection... 4-3 Making the perfect
Chapter 4 DEFENSIVE DRIVING Chapter 4 Table of Contents Chapter 4 DEFENSIVE DRIVING... 4-1 DEFENSIVE DRIVING... 4-3 Positioning The Bus... 4-3 When Making a Turn at an Intersection... 4-3 Making the perfect
Tiguan Haldex All-Wheel Drive
 Service Training Self Study Program 861803 Tiguan Haldex All-Wheel Drive Volkswagen of America, Inc. Volkswagen Academy Printed in U.S.A. Printed 3/2008 Course Number 861803 2008 Volkswagen of America,
Service Training Self Study Program 861803 Tiguan Haldex All-Wheel Drive Volkswagen of America, Inc. Volkswagen Academy Printed in U.S.A. Printed 3/2008 Course Number 861803 2008 Volkswagen of America,
K.Prasanna NIT Rourkela,India Summer Internship NUS
 K.Prasanna NIT Rourkela,India Summer Internship NUS LOCALIZATION Vehicle localization is an important topic as it finds its application in a multitude of fields like autonomous navigation and tracking
K.Prasanna NIT Rourkela,India Summer Internship NUS LOCALIZATION Vehicle localization is an important topic as it finds its application in a multitude of fields like autonomous navigation and tracking
Fault codes DM1. Industrial engines DC09, DC13, DC16. Marine engines DI09, DI13, DI16 INSTALLATION MANUAL. 03:10 Issue 5.0 en-gb 1
 Fault codes DM1 Industrial engines DC09, DC13, DC16 Marine engines DI09, DI13, DI16 03:10 Issue 5.0 en-gb 1 DM1...3 Abbreviations...3 Fault type identifier...3...4 03:10 Issue 5.0 en-gb 2 DM1 DM1 Fault
Fault codes DM1 Industrial engines DC09, DC13, DC16 Marine engines DI09, DI13, DI16 03:10 Issue 5.0 en-gb 1 DM1...3 Abbreviations...3 Fault type identifier...3...4 03:10 Issue 5.0 en-gb 2 DM1 DM1 Fault
Sustainable mobility: the Italian technological challenge
 Sustainable mobility: the Italian technological challenge an innovative paradigm for a new vehicles' generation ANFIA-ANIE ANIE WORKSHOP Hannover Messe 2010, April 19th Ing. Pier Luigi Farina DUCATI energia:
Sustainable mobility: the Italian technological challenge an innovative paradigm for a new vehicles' generation ANFIA-ANIE ANIE WORKSHOP Hannover Messe 2010, April 19th Ing. Pier Luigi Farina DUCATI energia:
160 ATJ 180 ATJ. 16,25 m (160 ATJ) 17,65 m (180 ATJ) 9,10 m (160 ATJ) 10,60 m (180 ATJ)
 17,65 m (180 ATJ) 9,10 m (160 ATJ) 10,60 m (180 ATJ)") 160 ATJ 180 ATJ 160 ATJ 180 ATJ MANITOU, the world leader in materials handling, has the ability to accompany you on all types of terrain. The 160 and 180ATJ models have been developed to respond to all
160 ATJ 180 ATJ 160 ATJ 180 ATJ MANITOU, the world leader in materials handling, has the ability to accompany you on all types of terrain. The 160 and 180ATJ models have been developed to respond to all
Useful Motor/Torque Equations for EML2322L
 Useful Motor/Torque Equations for EML2322L Force (Newtons) F = m x a m = mass (kg) a = acceleration (m/s 2 ) Motor Torque (Newton-meters) T = F x d F = force (Newtons) d = moment arm (meters) Power (Watts)
Useful Motor/Torque Equations for EML2322L Force (Newtons) F = m x a m = mass (kg) a = acceleration (m/s 2 ) Motor Torque (Newton-meters) T = F x d F = force (Newtons) d = moment arm (meters) Power (Watts)
KINEMATICS OF PARTICLES RELATIVE MOTION WITH RESPECT TO TRANSLATING AXES
 KINEMTICS OF PRTICLES RELTIVE MOTION WITH RESPECT TO TRNSLTING XES In the previous articles, we have described particle motion using coordinates with respect to fixed reference axes. The displacements,
KINEMTICS OF PRTICLES RELTIVE MOTION WITH RESPECT TO TRNSLTING XES In the previous articles, we have described particle motion using coordinates with respect to fixed reference axes. The displacements,
FORKLIFT STABILITY. MATERIAL HANDING AND ROBOTICS I. Practical course. Dávid HURI office door number: 324/6 [email protected].
 FORKLIFT STABILITY MATERIAL HANDING AND ROBOTICS I. Practical course Dávid HURI office door number: 324/6 [email protected] What is a powered industrial truck (P.I.T.)? Definition: A powered vehicle
FORKLIFT STABILITY MATERIAL HANDING AND ROBOTICS I. Practical course Dávid HURI office door number: 324/6 [email protected] What is a powered industrial truck (P.I.T.)? Definition: A powered vehicle
Aerospace Information Technology Topics for Internships and Bachelor s and Master s Theses
 Aerospace Information Technology s for Internships and Bachelor s and Master s Theses Version Nov. 2014 The Chair of Aerospace Information Technology addresses several research topics in the area of: Avionic
Aerospace Information Technology s for Internships and Bachelor s and Master s Theses Version Nov. 2014 The Chair of Aerospace Information Technology addresses several research topics in the area of: Avionic
Vision-based Walking Parameter Estimation for Biped Locomotion Imitation
 Vision-based Walking Parameter Estimation for Biped Locomotion Imitation Juan Pedro Bandera Rubio 1, Changjiu Zhou 2 and Francisco Sandoval Hernández 1 1 Dpto. Tecnología Electrónica, E.T.S.I. Telecomunicación
Vision-based Walking Parameter Estimation for Biped Locomotion Imitation Juan Pedro Bandera Rubio 1, Changjiu Zhou 2 and Francisco Sandoval Hernández 1 1 Dpto. Tecnología Electrónica, E.T.S.I. Telecomunicación
Digital Position Control for Analog Servos
 Digital Control for Analog Servos Sven Behnke and Michael Schreiber Humanoid Robots Group, Computer Science Institute University of Freiburg, Georges-Köhler-Allee 52, 79 Freiburg, Germany Email: { behnke
Digital Control for Analog Servos Sven Behnke and Michael Schreiber Humanoid Robots Group, Computer Science Institute University of Freiburg, Georges-Köhler-Allee 52, 79 Freiburg, Germany Email: { behnke
Lecture L22-2D Rigid Body Dynamics: Work and Energy
 J. Peraire, S. Widnall 6.07 Dynamics Fall 008 Version.0 Lecture L - D Rigid Body Dynamics: Work and Energy In this lecture, we will revisit the principle of work and energy introduced in lecture L-3 for
J. Peraire, S. Widnall 6.07 Dynamics Fall 008 Version.0 Lecture L - D Rigid Body Dynamics: Work and Energy In this lecture, we will revisit the principle of work and energy introduced in lecture L-3 for
Introduction to Linear Actuators: Precision Linear Motion Accomplished Easily and Economically
 Introduction to Linear Actuators: Precision Linear Motion Accomplished Easily and Economically Part 1 of 2 When students are trained in classic mechanical engineering, they are taught to construct a system
Introduction to Linear Actuators: Precision Linear Motion Accomplished Easily and Economically Part 1 of 2 When students are trained in classic mechanical engineering, they are taught to construct a system
LINEAR ACTUATORS. Linear Actuators. Linear Actuators. Linear Actuators are Actuators that creates motion in a straight line, as contrasted
 LINEAR ACTUATORS Linear Actuators Linear Actuators Linear Actuators are Actuators that creates motion in a straight line, as contrasted with circular motion of a conventional electric motor. Linear actuators
LINEAR ACTUATORS Linear Actuators Linear Actuators Linear Actuators are Actuators that creates motion in a straight line, as contrasted with circular motion of a conventional electric motor. Linear actuators
Electric Motors and Drives
 EML 2322L MAE Design and Manufacturing Laboratory Electric Motors and Drives To calculate the peak power and torque produced by an electric motor, you will need to know the following: Motor supply voltage,
EML 2322L MAE Design and Manufacturing Laboratory Electric Motors and Drives To calculate the peak power and torque produced by an electric motor, you will need to know the following: Motor supply voltage,
Mechanics lecture 7 Moment of a force, torque, equilibrium of a body
 G.1 EE1.el3 (EEE1023): Electronics III Mechanics lecture 7 Moment of a force, torque, equilibrium of a body Dr Philip Jackson http://www.ee.surrey.ac.uk/teaching/courses/ee1.el3/ G.2 Moments, torque and
G.1 EE1.el3 (EEE1023): Electronics III Mechanics lecture 7 Moment of a force, torque, equilibrium of a body Dr Philip Jackson http://www.ee.surrey.ac.uk/teaching/courses/ee1.el3/ G.2 Moments, torque and
Bendix Air Disc Brakes
 Bendix Air Disc Brakes Optimum Performance. Optimum Engineering. A i r D r u m B r a k e s A i r D i s c B r a k e s A i r B r a k e C h a m b e r s S l a c k A d j u s t e r s H y d r a u l i c s A major
Bendix Air Disc Brakes Optimum Performance. Optimum Engineering. A i r D r u m B r a k e s A i r D i s c B r a k e s A i r B r a k e C h a m b e r s S l a c k A d j u s t e r s H y d r a u l i c s A major
Wheeled Vehicle Design For Science Olympiad By Carey I. Fisher
 Wheeled Vehicle Design For Science Olympiad By Carey I. Fisher The Wheeled Vehicle competition requires that the vehicle travel a specific distance set by the judge at the time of the contest. So the problem
Wheeled Vehicle Design For Science Olympiad By Carey I. Fisher The Wheeled Vehicle competition requires that the vehicle travel a specific distance set by the judge at the time of the contest. So the problem
Data Analysis Software
 Data Analysis Software Compatible with all Race Technology products Fully integrated video support Accurate track maps Graphs generated with a single mouse click for fast analysis Automatically splits
Data Analysis Software Compatible with all Race Technology products Fully integrated video support Accurate track maps Graphs generated with a single mouse click for fast analysis Automatically splits
Autonomous Mobile Robot-I
 Autonomous Mobile Robot-I Sabastian, S.E and Ang, M. H. Jr. Department of Mechanical Engineering National University of Singapore 21 Lower Kent Ridge Road, Singapore 119077 ABSTRACT This report illustrates
Autonomous Mobile Robot-I Sabastian, S.E and Ang, M. H. Jr. Department of Mechanical Engineering National University of Singapore 21 Lower Kent Ridge Road, Singapore 119077 ABSTRACT This report illustrates
A descriptive definition of valve actuators
 A descriptive definition of valve actuators Abstract A valve actuator is any device that utilizes a source of power to operate a valve. This source of power can be a human being working a manual gearbox
A descriptive definition of valve actuators Abstract A valve actuator is any device that utilizes a source of power to operate a valve. This source of power can be a human being working a manual gearbox
Adaptive Cruise Control of a Passenger Car Using Hybrid of Sliding Mode Control and Fuzzy Logic Control
 Adaptive Cruise Control of a assenger Car Using Hybrid of Sliding Mode Control and Fuzzy Logic Control Somphong Thanok, Manukid arnichkun School of Engineering and Technology, Asian Institute of Technology,
Adaptive Cruise Control of a assenger Car Using Hybrid of Sliding Mode Control and Fuzzy Logic Control Somphong Thanok, Manukid arnichkun School of Engineering and Technology, Asian Institute of Technology,
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF
 Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter ([email protected]) Abstract In this article an autonomous advertising mobile robot that has been realized in
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter ([email protected]) Abstract In this article an autonomous advertising mobile robot that has been realized in
F output. F input. F = Force in Newtons ( N ) d output. d = distance ( m )
 d output. d = distance ( m )") Mechanical Advantage, Speed Ratio, Work and Efficiency Machines Make Work Easier Machines help people do things that they normally couldn t do on their own. Mechanical Advantage A machine makes work easier
Mechanical Advantage, Speed Ratio, Work and Efficiency Machines Make Work Easier Machines help people do things that they normally couldn t do on their own. Mechanical Advantage A machine makes work easier
CFD Modelling and Real-time testing of the Wave Surface Glider (WSG) Robot
 Robot") 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 CFD Modelling and Real-time testing of the Wave Surface Glider (WSG) Robot
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 CFD Modelling and Real-time testing of the Wave Surface Glider (WSG) Robot
MR6 MR30. limit switches Compacta slip-on geared motors with integrated limit switches (figure 1) are ideal drives for reversing tasks (figure 2).
 are ideal drives for reversing tasks (figure 2).") Slip-on geared motors Compacta General MST MR6 MS12 cutaway AG60 cutaway MR30 Compacta limit switches Compacta slip-on geared motors with integrated limit switches (figure 1) are ideal drives for reversing
Slip-on geared motors Compacta General MST MR6 MS12 cutaway AG60 cutaway MR30 Compacta limit switches Compacta slip-on geared motors with integrated limit switches (figure 1) are ideal drives for reversing