Lecture 3: Teleoperation
|
|
|
- Brendan Daniels
- 10 years ago
- Views:
Transcription
1 ME 328: Medical Robotics Spring 2015 Lecture 3: Teleoperation Allison Okamura Stanford University

2 Announcements 1. I am not Allison. 2. You re a huge class. So, we found a 2nd CA! meet Jeesu Baek [email protected] 3. Assignment #1 due Thursday by 4 PM. 4. Keep checking Piazza for office hour updates.

3 Teleoperation

4 the genesis of teleoperation? A Polygraph is a device that produces a copy of a piece of writing simultaneously with the creation of the original, using pens and ink. Famously used by Thomas Jefferson ~1805. Typically uses a pantograph mechanism: a four-bar linkage with parallel bars such that motion at one point is reproduced at another point

5 teleoperation history History: First Master-Slave Manipulator: 1948, Ray Goertz, U.S. Atomic Energy Commission Goal: protection of workers from radiation, while enabling precise manipulation of materials a device which is responsive to another device is termed a "slave" and the controlling device is termed a "master At first, mechanical linkages and cables 1954: electrical and hydraulic servomechanisms 1960s: Closed circuit television and HMDs

6 these people probably never envisioned robot-assisted surgery in surgery, slave robot = patient-side robot

7 bilateral control: force/haptic feedback inherent in mechanical teleoperators forces at the slave endeffector are reflected to the master end-effector displacements produced at the slave end-effector produce a displacement at the master end-effector

8 modern telemanipulators Undersea: exploration and oil acquisition Space 1967: Surveyor III landed on the surface of the Moon (a few seconds delay in the two-way transmission to earth of commands and information) 1976: Viking spacecraft, landed on Mars was programmed to carry out strictly automated operations Shuttle Remote Manipulator System (SRMS): retrieves satellites and place them in the cargo bay; mobile work platform for astronauts during space walks
: retrieves satellites and place them in the cargo bay; mobile work platform for astronauts during")
9 even more dexterous teleoperation Robonaut Robot Systems Technology Branch at NASA's Johnson Space Center Purpose: Replace astronauts in dangerous missions, such as space walk, on the space shuttle and/or the space station Both autonomous operation and teleoperation are being developed

10 simple system example
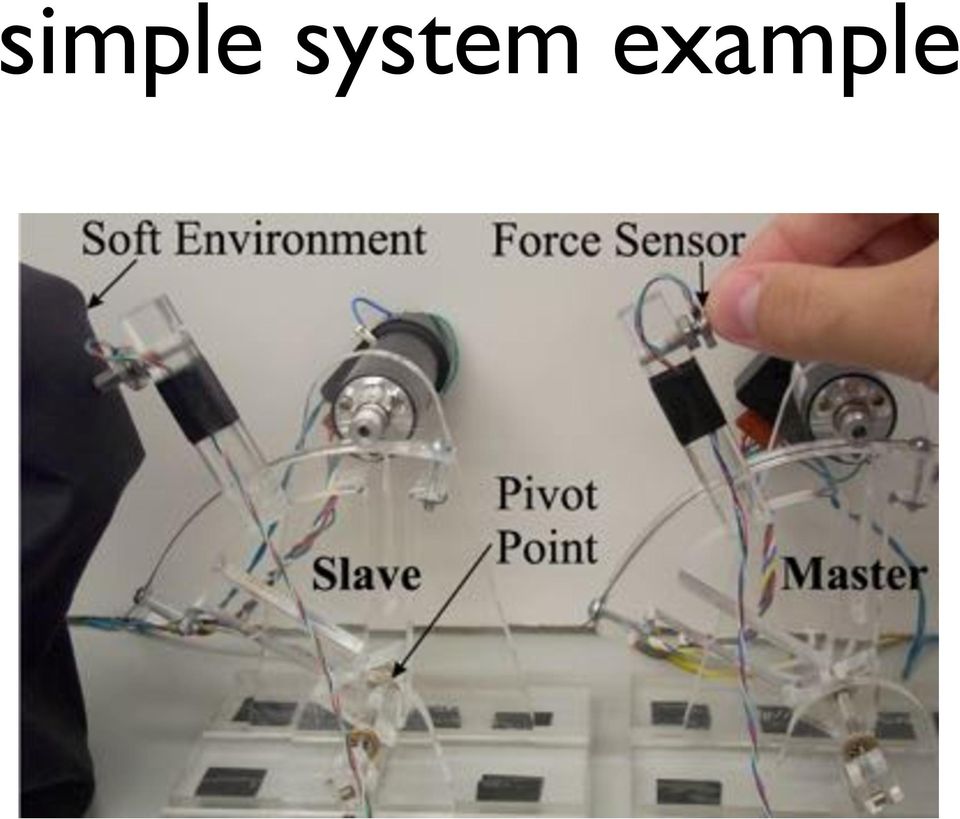
11 simple system example
12 unilateral teleoperator model modified from Kuchenbecker Ph.D. Thesis (2006)

13 bilateral teleoperator model (using position) from Kuchenbecker Ph.D. Thesis (2006)

14 bilateral teleoperator model (using force) from Kuchenbecker Ph.D. Thesis (2006)

15 typical slave robot controller this is a proportional-derivative controller, which attempts to make the slave follow the master s position and velocity f as (t) =k ps (x m x s )+k ds (ẋ m ẋ s ) f as (t) x m x s slave actuator force position of master position of slave k ps k ds slave proportional gain slave derivative gain every time the master s position is recorded, the slave robot attempts to follow the master using this control law

16 master robot controller for unilateral teleoperation f am =0 f am (t) master actuator force the force applied by the master actuator (if it even exists) is zero
 is")
17 master robot controller for bilateral teleoperation (using position) f am (t) =k pm (x s x m )+k dm (ẋ s ẋ m ) f am (t) x m x s master actuator force position of slave position of master k pm k dm master proportional gain master derivative gain every time the slave s position is recorded, the master robot attempts to follow the slave using this control law

18 master robot controller for bilateral teleoperation (using force) f am (t) =f e f am (t) f e master actuator force measured environment force every time the force between the slave and the environment is recorded, the master robot outputs this amount of force

19 impedance control attempts to make the user feel a particular impedance an assumption often made in analysis/prediction of performance both the master and slave are ideal impedance-type devices: linear f(t) =mẍ + bẋ no multi-dof coupling no nonlinear friction no backlash infinite mechanical stiffness if you want to do this kind of analysis, take ME 327: Design and Control of Haptic Systems (perhaps in Fall 2015)

20 questions motion scaling: why would you want this, and how would you change the control laws to accomplish this? force amplification: why would you want this, and how would you change the control laws to accomplish this?

21 questions what might limit the values of the controller gains that you can choose? what are the comparative advantages and disadvantages of position- and force-based bilateral teleoperation?
22 teleoperation performance metrics tracking the ability of the slave to follow the master transparency (for bilateral teleoperation only) many definitions, but a popular one is whether the mechanical impedance felt by the user is the same as the impedance of the environment
23 questions what factors might affect tracking? what factors might affect transparency?
24 force generation signals desired force (in computer) counts D/A volts you are computing kinematics in Assignment 1, but in the Assignment 2 (lab), all this will be done for you amplifiers voltage or current motor force/torque kinematics endpoint force/torque
25 controller on one end, system dynamics on the other a controller computes the desired force e.g. f = kp*(x-xd) desired force (in computer) in Assignment 2 (lab), you will need to write the controllers endpoint force/torque this force and externally applied loads result in robot motion e.g., solve for x in f = mẍ + bẋ
Medical Robotics. Control Modalities
 Università di Roma La Sapienza Medical Robotics Control Modalities The Hands-On Acrobot Robot Marilena Vendittelli Dipartimento di Ingegneria Informatica, Automatica e Gestionale Control modalities differ
Università di Roma La Sapienza Medical Robotics Control Modalities The Hands-On Acrobot Robot Marilena Vendittelli Dipartimento di Ingegneria Informatica, Automatica e Gestionale Control modalities differ
Stable Forbidden-Region Virtual Fixtures for Bilateral Telemanipulation
 Stable Forbidden-Region Virtual Fixtures for Bilateral Telemanipulation Jake J. Abbott 1 e-mail: [email protected] Allison M. Okamura e-mail: [email protected] Department of Mechanical Engineering, Johns
Stable Forbidden-Region Virtual Fixtures for Bilateral Telemanipulation Jake J. Abbott 1 e-mail: [email protected] Allison M. Okamura e-mail: [email protected] Department of Mechanical Engineering, Johns
ENERGY TRANSFER SYSTEMS AND THEIR DYNAMIC ANALYSIS
 ENERGY TRANSFER SYSTEMS AND THEIR DYNAMIC ANALYSIS Many mechanical energy systems are devoted to transfer of energy between two points: the source or prime mover (input) and the load (output). For chemical
ENERGY TRANSFER SYSTEMS AND THEIR DYNAMIC ANALYSIS Many mechanical energy systems are devoted to transfer of energy between two points: the source or prime mover (input) and the load (output). For chemical
Force/position control of a robotic system for transcranial magnetic stimulation
 Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
Scooter, 3 wheeled cobot North Western University. PERCRO Exoskeleton
 Scooter, 3 wheeled cobot North Western University A cobot is a robot for direct physical interaction with a human operator, within a shared workspace PERCRO Exoskeleton Unicycle cobot the simplest possible
Scooter, 3 wheeled cobot North Western University A cobot is a robot for direct physical interaction with a human operator, within a shared workspace PERCRO Exoskeleton Unicycle cobot the simplest possible
CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation. Prof. Dr. Hani Hagras
 1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
Pneumatically Driven Robot System with Force Perception for Minimally Invasive Surgery
 Pneumatically Driven Robot System with Force Perception for Minimally Invasive Surgery Tokyo Institute of Technology Kotaro Tadano Daisuke Haraguchi Kenji Kawashima Research Overview on Surgical Robots
Pneumatically Driven Robot System with Force Perception for Minimally Invasive Surgery Tokyo Institute of Technology Kotaro Tadano Daisuke Haraguchi Kenji Kawashima Research Overview on Surgical Robots
- 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering
 - 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering Fall 2005 1 Chapter 1 Introduction Many definitions have been suggested for what we call a robot. The word may conjure up
- 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering Fall 2005 1 Chapter 1 Introduction Many definitions have been suggested for what we call a robot. The word may conjure up
Design Aspects of Robot Manipulators
 Design Aspects of Robot Manipulators Dr. Rohan Munasinghe Dept of Electronic and Telecommunication Engineering University of Moratuwa System elements Manipulator (+ proprioceptive sensors) End-effector
Design Aspects of Robot Manipulators Dr. Rohan Munasinghe Dept of Electronic and Telecommunication Engineering University of Moratuwa System elements Manipulator (+ proprioceptive sensors) End-effector
The Space Shuttle: Teacher s Guide
 The Space Shuttle: Teacher s Guide Grade Level: 6-8 Curriculum Focus: Astronomy/Space Lesson Duration: Two class periods Program Description This video, divided into four segments, explores scientists'
The Space Shuttle: Teacher s Guide Grade Level: 6-8 Curriculum Focus: Astronomy/Space Lesson Duration: Two class periods Program Description This video, divided into four segments, explores scientists'
Universal Exoskeleton Arm Design for Rehabilitation
 Journal of Automation and Control Engineering Vol. 3, No. 6, December 215 Universal Exoskeleton Arm Design for Rehabilitation Siam Charoenseang and Sarut Panjan Institute of Field Robotics, King Mongkut
Journal of Automation and Control Engineering Vol. 3, No. 6, December 215 Universal Exoskeleton Arm Design for Rehabilitation Siam Charoenseang and Sarut Panjan Institute of Field Robotics, King Mongkut
Intelligent Robotics Lab.
 1 Variable Stiffness Actuation based on Dual Actuators Connected in Series and Parallel Prof. Jae-Bok Song ([email protected] ). (http://robotics.korea.ac.kr) ti k Depart. of Mechanical Engineering, Korea
1 Variable Stiffness Actuation based on Dual Actuators Connected in Series and Parallel Prof. Jae-Bok Song ([email protected] ). (http://robotics.korea.ac.kr) ti k Depart. of Mechanical Engineering, Korea
Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots
![Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots](/thumbs/27/11692183.jpg "Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots") Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
ECE 495 Project 3: Shocker Actuator Subsystem and Website Design. Group 1: One Awesome Engineering
 ECE 495 Project 3: Shocker Actuator Subsystem and Website Design Group 1: One Awesome Engineering Luquita Edwards Evan Whetsell Sunny Verma Thomas Ryan Willis Long I. Executive Summary The main goal behind
ECE 495 Project 3: Shocker Actuator Subsystem and Website Design Group 1: One Awesome Engineering Luquita Edwards Evan Whetsell Sunny Verma Thomas Ryan Willis Long I. Executive Summary The main goal behind
Kinematics and Dynamics of Mechatronic Systems. Wojciech Lisowski. 1 An Introduction
 Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Kinematics and Dynamics of Mechatronic Systems Wojciech Lisowski 1 An Introduction KADOMS KRIM, WIMIR, AGH Kraków 1 The course contents:
Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Kinematics and Dynamics of Mechatronic Systems Wojciech Lisowski 1 An Introduction KADOMS KRIM, WIMIR, AGH Kraków 1 The course contents:
UOM Robotics and Industrial Automation Laboratory
 UOM Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, RIAL Mission o to be a Centre of Excellence in Malta for research, development, teaching and outreach
UOM Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, RIAL Mission o to be a Centre of Excellence in Malta for research, development, teaching and outreach
Chapter. 4 Mechanism Design and Analysis
 Chapter. 4 Mechanism Design and Analysis 1 All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
Chapter. 4 Mechanism Design and Analysis 1 All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
EasyC. Programming Tips
 EasyC Programming Tips PART 1: EASYC PROGRAMMING ENVIRONMENT The EasyC package is an integrated development environment for creating C Programs and loading them to run on the Vex Control System. Its Opening
EasyC Programming Tips PART 1: EASYC PROGRAMMING ENVIRONMENT The EasyC package is an integrated development environment for creating C Programs and loading them to run on the Vex Control System. Its Opening
Manufacturing Equipment Modeling
 QUESTION 1 For a linear axis actuated by an electric motor complete the following: a. Derive a differential equation for the linear axis velocity assuming viscous friction acts on the DC motor shaft, leadscrew,
QUESTION 1 For a linear axis actuated by an electric motor complete the following: a. Derive a differential equation for the linear axis velocity assuming viscous friction acts on the DC motor shaft, leadscrew,
LEGO NXT-based Robotic Arm
 Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University [email protected], [email protected], [email protected]
Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University [email protected], [email protected], [email protected]
ELECTRICAL ENGINEERING
 EE ELECTRICAL ENGINEERING See beginning of Section H for abbreviations, course numbers and coding. The * denotes labs which are held on alternate weeks. A minimum grade of C is required for all prerequisite
EE ELECTRICAL ENGINEERING See beginning of Section H for abbreviations, course numbers and coding. The * denotes labs which are held on alternate weeks. A minimum grade of C is required for all prerequisite
Sensors Collecting Manufacturing Process Data
 Sensors & Actuators Sensors Collecting Manufacturing Process Data Data must be collected from the manufacturing process Data (commands and instructions) must be communicated to the process Data are of
Sensors & Actuators Sensors Collecting Manufacturing Process Data Data must be collected from the manufacturing process Data (commands and instructions) must be communicated to the process Data are of
Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and Motion Optimization for Maritime Robotic Research
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and
UNIT II Robots Drive Systems and End Effectors Part-A Questions
 UNIT II Robots Drive Systems and End Effectors Part-A Questions 1. Define End effector. End effector is a device that is attached to the end of the wrist arm to perform specific task. 2. Give some examples
UNIT II Robots Drive Systems and End Effectors Part-A Questions 1. Define End effector. End effector is a device that is attached to the end of the wrist arm to perform specific task. 2. Give some examples
5GRADE Opinion Genre
 5GRADE Opinion Genre All items contained in this Assesslet are the property of the Georgia Center for Assessment. Items may be used for formative purposes by the customer within their school setting. Forms
5GRADE Opinion Genre All items contained in this Assesslet are the property of the Georgia Center for Assessment. Items may be used for formative purposes by the customer within their school setting. Forms
MODELING FIRST AND SECOND ORDER SYSTEMS IN SIMULINK
 MODELING FIRST AND SECOND ORDER SYSTEMS IN SIMULINK First and second order differential equations are commonly studied in Dynamic courses, as they occur frequently in practice. Because of this, we will
MODELING FIRST AND SECOND ORDER SYSTEMS IN SIMULINK First and second order differential equations are commonly studied in Dynamic courses, as they occur frequently in practice. Because of this, we will
Modeling Mechanical Systems
 chp3 1 Modeling Mechanical Systems Dr. Nhut Ho ME584 chp3 2 Agenda Idealized Modeling Elements Modeling Method and Examples Lagrange s Equation Case study: Feasibility Study of a Mobile Robot Design Matlab
chp3 1 Modeling Mechanical Systems Dr. Nhut Ho ME584 chp3 2 Agenda Idealized Modeling Elements Modeling Method and Examples Lagrange s Equation Case study: Feasibility Study of a Mobile Robot Design Matlab
DESIGN AND PROTOTYPING OF A THREE DEGREES OF FREEDOM ROBOTIC WRIST MECHANISM FOR A ROBOTIC SURGERY SYSTEM
 DESIGN AND PROTOTYPING OF A THREE DEGREES OF FREEDOM ROBOTIC WRIST MECHANISM FOR A ROBOTIC SURGERY SYSTEM by TAOMING LIU Submitted in partial fulfillment of the requirements for the degree of Master of
DESIGN AND PROTOTYPING OF A THREE DEGREES OF FREEDOM ROBOTIC WRIST MECHANISM FOR A ROBOTIC SURGERY SYSTEM by TAOMING LIU Submitted in partial fulfillment of the requirements for the degree of Master of
FLORIDA INTERNATIONAL UNIVERSITY. Miami, Florida ADAPTIVE FAULT-TOLERANT TELEOPERATION. A dissertation submitted in partial fulfillment of the
 FLORIDA INTERNATIONAL UNIVERSITY Miami, Florida ADAPTIVE FAULT-TOLERANT TELEOPERATION A dissertation submitted in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY in MECHANICAL
FLORIDA INTERNATIONAL UNIVERSITY Miami, Florida ADAPTIVE FAULT-TOLERANT TELEOPERATION A dissertation submitted in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY in MECHANICAL
Tips For Selecting DC Motors For Your Mobile Robot
 Tips For Selecting DC Motors For Your Mobile Robot By AJ Neal When building a mobile robot, selecting the drive motors is one of the most important decisions you will make. It is a perfect example of an
Tips For Selecting DC Motors For Your Mobile Robot By AJ Neal When building a mobile robot, selecting the drive motors is one of the most important decisions you will make. It is a perfect example of an
Robotic Collision Sensor and/ Axial Compliance Device Protector
 NEW 2005 CATALOG Robotic Collision Sensor and/ Axial Compliance Device Protector PROTECTOR Product Description The Protector is a collision sensor, or crash protection device, designed to prevent costly
NEW 2005 CATALOG Robotic Collision Sensor and/ Axial Compliance Device Protector PROTECTOR Product Description The Protector is a collision sensor, or crash protection device, designed to prevent costly
INTRODUCTION TO ROBOTICS. Dr. Bob Williams, [email protected], Ohio University
 INTRODUCTION TO ROBOTICS Dr. Bob Williams, [email protected], Ohio University History Leonardo da Vinci created many robot-like sketches and designs in the 1500 s. The word robot first appeared in print
INTRODUCTION TO ROBOTICS Dr. Bob Williams, [email protected], Ohio University History Leonardo da Vinci created many robot-like sketches and designs in the 1500 s. The word robot first appeared in print
ARCHITECTURE OF INDUSTRIAL AUTOMATION SYSTEMS
 ARCHITECTURE OF INDUSTRIAL AUTOMATION SYSTEMS Abdu Idris Omer Taleb M.M., PhD Majmaah University, Kingdom of Saudia Arabia Abstract This article is aimed to name the levels of industrial automation, describes
ARCHITECTURE OF INDUSTRIAL AUTOMATION SYSTEMS Abdu Idris Omer Taleb M.M., PhD Majmaah University, Kingdom of Saudia Arabia Abstract This article is aimed to name the levels of industrial automation, describes
APPLICATION OF AN INDUSTRIAL ROBOT IN MASTER- SLAVE TELEOPERATION WITH HAPTIC INTERFACE
 TAMPERE UNIVERSITY OF TECHNOLOGY RIGOBERTO CABRERA APPLICATION OF AN INDUSTRIAL ROBOT IN MASTER- SLAVE TELEOPERATION WITH HAPTIC INTERFACE Master of Science Thesis Examiners: Professor Matti Vilenius and
TAMPERE UNIVERSITY OF TECHNOLOGY RIGOBERTO CABRERA APPLICATION OF AN INDUSTRIAL ROBOT IN MASTER- SLAVE TELEOPERATION WITH HAPTIC INTERFACE Master of Science Thesis Examiners: Professor Matti Vilenius and
Lecture 07: Work and Kinetic Energy. Physics 2210 Fall Semester 2014
 Lecture 07: Work and Kinetic Energy Physics 2210 Fall Semester 2014 Announcements Schedule next few weeks: 9/08 Unit 3 9/10 Unit 4 9/15 Unit 5 (guest lecturer) 9/17 Unit 6 (guest lecturer) 9/22 Unit 7,
Lecture 07: Work and Kinetic Energy Physics 2210 Fall Semester 2014 Announcements Schedule next few weeks: 9/08 Unit 3 9/10 Unit 4 9/15 Unit 5 (guest lecturer) 9/17 Unit 6 (guest lecturer) 9/22 Unit 7,
Chapter 11 SERVO VALVES. Fluid Power Circuits and Controls, John S.Cundiff, 2001
 Chapter 11 SERVO VALVES Fluid Power Circuits and Controls, John S.Cundiff, 2001 Servo valves were developed to facilitate the adjustment of fluid flow based on the changes in the load motion. 1 Typical
Chapter 11 SERVO VALVES Fluid Power Circuits and Controls, John S.Cundiff, 2001 Servo valves were developed to facilitate the adjustment of fluid flow based on the changes in the load motion. 1 Typical
Analog control unit for mobile robots
 Analog control unit for mobile robots Soldering kit for experimentation For Fischertechnik robots and others Most diverse functions Requires no programming Patented sensor technology Summary We are pleased
Analog control unit for mobile robots Soldering kit for experimentation For Fischertechnik robots and others Most diverse functions Requires no programming Patented sensor technology Summary We are pleased
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku
 Saeed B. Niku 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik GmbH. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.
Saeed B. Niku 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik GmbH. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.
DESIGN OF A 7 DEGREE-OF-FREEDOM HAPTIC ROBOT
 DESIGN OF A 7 DEGREE-OF-FREEDOM HAPTIC ROBOT By Christopher E. Marince Thesis Submitted to the Faculty of the Graduate School of Vanderbilt University in partial fulfillment of the requirements for the
DESIGN OF A 7 DEGREE-OF-FREEDOM HAPTIC ROBOT By Christopher E. Marince Thesis Submitted to the Faculty of the Graduate School of Vanderbilt University in partial fulfillment of the requirements for the
Robotics & Automation
 Robotics & Automation Levels: Grades 10-12 Units of Credit: 1.0 CIP Code: 21.0117 Core Code: 38-01-00-00-130 Prerequisite: None Skill Test: 612 COURSE DESCRIPTION Robotics & Automation is a lab-based,
Robotics & Automation Levels: Grades 10-12 Units of Credit: 1.0 CIP Code: 21.0117 Core Code: 38-01-00-00-130 Prerequisite: None Skill Test: 612 COURSE DESCRIPTION Robotics & Automation is a lab-based,
INTRODUCTION. Robotics is a relatively young field of modern technology that crosses traditional
 1 INTRODUCTION Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires knowledge
1 INTRODUCTION Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires knowledge
Closed-Loop Motion Control Simplifies Non-Destructive Testing
 Closed-Loop Motion Control Simplifies Non-Destructive Testing Repetitive non-destructive testing (NDT) applications abound, and designers should consider using programmable motion controllers to power
Closed-Loop Motion Control Simplifies Non-Destructive Testing Repetitive non-destructive testing (NDT) applications abound, and designers should consider using programmable motion controllers to power
Application Note AN-SERV-006
 THIS INFORMATION PROVIDED BY AUTOMATIONDIRECT.COM TECHNICAL SUPPORT IS SUPPLIED "AS IS", WITHOUT ANY GUARANTEE OF ANY KIND. These documents are provided by our technical support department to assist others.
THIS INFORMATION PROVIDED BY AUTOMATIONDIRECT.COM TECHNICAL SUPPORT IS SUPPLIED "AS IS", WITHOUT ANY GUARANTEE OF ANY KIND. These documents are provided by our technical support department to assist others.
Space Exploration Classroom Activity
 Space Exploration Classroom Activity The Classroom Activity introduces students to the context of a performance task, so they are not disadvantaged in demonstrating the skills the task intends to assess.
Space Exploration Classroom Activity The Classroom Activity introduces students to the context of a performance task, so they are not disadvantaged in demonstrating the skills the task intends to assess.
Reading: HH Sections 4.11 4.13, 4.19 4.20 (pgs. 189-212, 222 224)
") 6 OP AMPS II 6 Op Amps II In the previous lab, you explored several applications of op amps. In this exercise, you will look at some of their limitations. You will also examine the op amp integrator and
6 OP AMPS II 6 Op Amps II In the previous lab, you explored several applications of op amps. In this exercise, you will look at some of their limitations. You will also examine the op amp integrator and
CHAPTER 1 INTRODUCTION
 CHAPTER 1 INTRODUCTION 1.1 Background of the Research Agile and precise maneuverability of helicopters makes them useful for many critical tasks ranging from rescue and law enforcement task to inspection
CHAPTER 1 INTRODUCTION 1.1 Background of the Research Agile and precise maneuverability of helicopters makes them useful for many critical tasks ranging from rescue and law enforcement task to inspection
Satellites and Space Stations
 Satellites and Space Stations A satellite is an object or a body that revolves around another object, which is usually much larger in mass. Natural satellites include the planets, which revolve around
Satellites and Space Stations A satellite is an object or a body that revolves around another object, which is usually much larger in mass. Natural satellites include the planets, which revolve around
Look at Our Galaxy. by Eve Beck. Space and Technology. Scott Foresman Reading Street 2.1.2
 Suggested levels for Guided Reading, DRA, Lexile, and Reading Recovery are provided in the Pearson Scott Foresman Leveling Guide. Space and Technology Look at Our Galaxy Genre Expository nonfiction Comprehension
Suggested levels for Guided Reading, DRA, Lexile, and Reading Recovery are provided in the Pearson Scott Foresman Leveling Guide. Space and Technology Look at Our Galaxy Genre Expository nonfiction Comprehension
Documentation. M-Bus 130-mbx
 Documentation M-Bus 130-mbx Introduction The mx M-Bus module is part of the mx Smart Slot communications family. With the integrated SmartSlot technology, mx systems ag offers automatic consumer data read-out
Documentation M-Bus 130-mbx Introduction The mx M-Bus module is part of the mx Smart Slot communications family. With the integrated SmartSlot technology, mx systems ag offers automatic consumer data read-out
Saturn V Straw Rocket
 Saturn V Straw Rocket Saturn V Rocket Activity Background Information As part of our NASA Tram Tour, you have the opportunity to view a Saturn V Rocket at our Rocket Park. This particular rocket was slated
Saturn V Straw Rocket Saturn V Rocket Activity Background Information As part of our NASA Tram Tour, you have the opportunity to view a Saturn V Rocket at our Rocket Park. This particular rocket was slated
SPACE EXPLORATION BYU Merit Badge PowWow Official Merit Badge Worksheet
 SPACE EXPLORATION BYU Merit Badge PowWow Official Merit Badge Worksheet Scout's Name Instructor's Name Scout's Address City State Zip Instructions 1) The Scout is to review the merit badge book before
SPACE EXPLORATION BYU Merit Badge PowWow Official Merit Badge Worksheet Scout's Name Instructor's Name Scout's Address City State Zip Instructions 1) The Scout is to review the merit badge book before
Procon Engineering. Technical Document PELR 1002. TERMS and DEFINITIONS
 Procon Engineering Technical Document PELR 1002 TERMS and DEFINITIONS The following terms are widely used in the weighing industry. Informal comment on terms is in italics and is not part of the formal
Procon Engineering Technical Document PELR 1002 TERMS and DEFINITIONS The following terms are widely used in the weighing industry. Informal comment on terms is in italics and is not part of the formal
Introduction to Process Control Actuators
 1 Introduction to Process Control Actuators Actuators are the final elements in a control system. They receive a low power command signal and energy input to amplify the command signal as appropriate to
1 Introduction to Process Control Actuators Actuators are the final elements in a control system. They receive a low power command signal and energy input to amplify the command signal as appropriate to
How To Calculate The Power Gain Of An Opamp
 A. M. Niknejad University of California, Berkeley EE 100 / 42 Lecture 8 p. 1/23 EE 42/100 Lecture 8: Op-Amps ELECTRONICS Rev C 2/8/2012 (9:54 AM) Prof. Ali M. Niknejad University of California, Berkeley
A. M. Niknejad University of California, Berkeley EE 100 / 42 Lecture 8 p. 1/23 EE 42/100 Lecture 8: Op-Amps ELECTRONICS Rev C 2/8/2012 (9:54 AM) Prof. Ali M. Niknejad University of California, Berkeley
DIGITAL-TO-ANALOGUE AND ANALOGUE-TO-DIGITAL CONVERSION
 DIGITAL-TO-ANALOGUE AND ANALOGUE-TO-DIGITAL CONVERSION Introduction The outputs from sensors and communications receivers are analogue signals that have continuously varying amplitudes. In many systems
DIGITAL-TO-ANALOGUE AND ANALOGUE-TO-DIGITAL CONVERSION Introduction The outputs from sensors and communications receivers are analogue signals that have continuously varying amplitudes. In many systems
LOW COST MOTOR PROTECTION FILTERS FOR PWM DRIVE APPLICATIONS STOPS MOTOR DAMAGE
 LOW COST MOTOR PROTECTION FILTERS FOR PWM DRIVE APPLICATIONS STOPS MOTOR DAMAGE Karl M. Hink, Executive Vice President Originally presented at the Power Quality 99 Conference ABSTRACT Motor protection
LOW COST MOTOR PROTECTION FILTERS FOR PWM DRIVE APPLICATIONS STOPS MOTOR DAMAGE Karl M. Hink, Executive Vice President Originally presented at the Power Quality 99 Conference ABSTRACT Motor protection
APPLIED PNEUMATICS AND HYDRAULICS H TUTORIAL HYDRAULIC AND PNEUMATIC CYLINDERS. This work covers part of outcome 2 of the standard Edexcel module.
 APPLIED PNEUMATICS AND HYDRAULICS H TUTORIAL HYDRAULIC AND PNEUMATIC CYLINDERS This work covers part of outcome 2 of the standard Edexcel module. The material needed for outcome 2 is very extensive so
APPLIED PNEUMATICS AND HYDRAULICS H TUTORIAL HYDRAULIC AND PNEUMATIC CYLINDERS This work covers part of outcome 2 of the standard Edexcel module. The material needed for outcome 2 is very extensive so
EDUMECH Mechatronic Instructional Systems. Ball on Beam System
 EDUMECH Mechatronic Instructional Systems Ball on Beam System Product of Shandor Motion Systems Written by Robert Hirsch Ph.D. 998-9 All Rights Reserved. 999 Shandor Motion Systems, Ball on Beam Instructional
EDUMECH Mechatronic Instructional Systems Ball on Beam System Product of Shandor Motion Systems Written by Robert Hirsch Ph.D. 998-9 All Rights Reserved. 999 Shandor Motion Systems, Ball on Beam Instructional
TOPO Trajectory Operations Officer
 ISS Live! was developed at NASA s Johnson Space Center (JSC) under NASA Contracts NNJ14RA02C and NNJ11HA14C wherein the U.S. Government retains certain rights. Console Handbook TOPO Trajectory Operations
ISS Live! was developed at NASA s Johnson Space Center (JSC) under NASA Contracts NNJ14RA02C and NNJ11HA14C wherein the U.S. Government retains certain rights. Console Handbook TOPO Trajectory Operations
INTRODUCTION TO COMMUNICATION SYSTEMS AND TRANSMISSION MEDIA
 COMM.ENG INTRODUCTION TO COMMUNICATION SYSTEMS AND TRANSMISSION MEDIA 9/6/2014 LECTURES 1 Objectives To give a background on Communication system components and channels (media) A distinction between analogue
COMM.ENG INTRODUCTION TO COMMUNICATION SYSTEMS AND TRANSMISSION MEDIA 9/6/2014 LECTURES 1 Objectives To give a background on Communication system components and channels (media) A distinction between analogue
ACOS - CCRS (Science) SC.K.7.1, SC.K.10, SC.1.2, SC.1.3, SC.1.11, SC.2.4, SC.2.7, SC.2.11
 SC.K.7.1, SC.K.10, SC.1.2, SC.1.3, SC.1.11, SC.2.4, SC.2.7, SC.2.11") USSRC UFT Labs Theme: Exploring the Solar System fall only - Lunar Landers Grades K-2 Overview: Students learn and review basic facts about the Moon, and learn about the spacecraft that were used to go
USSRC UFT Labs Theme: Exploring the Solar System fall only - Lunar Landers Grades K-2 Overview: Students learn and review basic facts about the Moon, and learn about the spacecraft that were used to go
Active Vibration Isolation of an Unbalanced Machine Spindle
 UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
Computer Controlled Generating Stations Control and Regulation Simulator, with SCADA SCE
 Technical Teaching Equipment Computer Controlled Generating Stations Control and Regulation Simulator, with SCADA SCE EDIBON SCADA System Teaching Technique used 4 5 2 Data Acquisition Board Cables and
Technical Teaching Equipment Computer Controlled Generating Stations Control and Regulation Simulator, with SCADA SCE EDIBON SCADA System Teaching Technique used 4 5 2 Data Acquisition Board Cables and
Basic Op Amp Circuits
 Basic Op Amp ircuits Manuel Toledo INEL 5205 Instrumentation August 3, 2008 Introduction The operational amplifier (op amp or OA for short) is perhaps the most important building block for the design of
Basic Op Amp ircuits Manuel Toledo INEL 5205 Instrumentation August 3, 2008 Introduction The operational amplifier (op amp or OA for short) is perhaps the most important building block for the design of
Energy, Work, and Power
 Energy, Work, and Power This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Energy, Work, and Power This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Lecture 2 Linear functions and examples
 EE263 Autumn 2007-08 Stephen Boyd Lecture 2 Linear functions and examples linear equations and functions engineering examples interpretations 2 1 Linear equations consider system of linear equations y
EE263 Autumn 2007-08 Stephen Boyd Lecture 2 Linear functions and examples linear equations and functions engineering examples interpretations 2 1 Linear equations consider system of linear equations y
HYDRAULIC ARM MODELING VIA MATLAB SIMHYDRAULICS
 Engineering MECHANICS, Vol. 16, 2009, No. 4, p. 287 296 287 HYDRAULIC ARM MODELING VIA MATLAB SIMHYDRAULICS Stanislav Věchet, Jiří Krejsa* System modeling is a vital tool for cost reduction and design
Engineering MECHANICS, Vol. 16, 2009, No. 4, p. 287 296 287 HYDRAULIC ARM MODELING VIA MATLAB SIMHYDRAULICS Stanislav Věchet, Jiří Krejsa* System modeling is a vital tool for cost reduction and design
Bioinstrumentation. Kuo-Sheng Cheng, Ph.D. Department of Biomedical Engineering National Cheng Kung University
 Bioinstrumentation Medical Instrumentation: Application and Design Third Edition John G. Webster, Editor Kuo-Sheng Cheng, Ph.D. Department of Biomedical Engineering National Cheng Kung University The Importance
Bioinstrumentation Medical Instrumentation: Application and Design Third Edition John G. Webster, Editor Kuo-Sheng Cheng, Ph.D. Department of Biomedical Engineering National Cheng Kung University The Importance
Digital to Analog and Analog to Digital Conversion
 Real world (lab) is Computer (binary) is digital Digital to Analog and Analog to Digital Conversion V t V t D/A or DAC and A/D or ADC D/A Conversion Computer DAC A/D Conversion Computer DAC Digital to
Real world (lab) is Computer (binary) is digital Digital to Analog and Analog to Digital Conversion V t V t D/A or DAC and A/D or ADC D/A Conversion Computer DAC A/D Conversion Computer DAC Digital to
Design, Fabrication, and Evaluation of a New Haptic Device Using a Parallel Mechanism
 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 6, NO. 3, SEPTEMBER 2001 221 Design, Fabrication, and Evaluation of a New Haptic Device Using a Parallel Mechanism Jungwon Yoon and Jeha Ryu, Member, IEEE Abstract
IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 6, NO. 3, SEPTEMBER 2001 221 Design, Fabrication, and Evaluation of a New Haptic Device Using a Parallel Mechanism Jungwon Yoon and Jeha Ryu, Member, IEEE Abstract
CNC HARDWARE & TOOLING BASICS
 Computer Aided Manufacturing (CAM) CNC HARDWARE & TOOLING BASICS Assoc. Prof. Dr. Tamer S. Mahmoud 1. Parts of CNC Machine Tools Any CNC machine tool essentially consists of the following parts: Part Program,
Computer Aided Manufacturing (CAM) CNC HARDWARE & TOOLING BASICS Assoc. Prof. Dr. Tamer S. Mahmoud 1. Parts of CNC Machine Tools Any CNC machine tool essentially consists of the following parts: Part Program,
Research Methodology Part III: Thesis Proposal. Dr. Tarek A. Tutunji Mechatronics Engineering Department Philadelphia University - Jordan
 Research Methodology Part III: Thesis Proposal Dr. Tarek A. Tutunji Mechatronics Engineering Department Philadelphia University - Jordan Outline Thesis Phases Thesis Proposal Sections Thesis Flow Chart
Research Methodology Part III: Thesis Proposal Dr. Tarek A. Tutunji Mechatronics Engineering Department Philadelphia University - Jordan Outline Thesis Phases Thesis Proposal Sections Thesis Flow Chart
UNIT 1 INTRODUCTION TO NC MACHINE TOOLS
 UNIT 1 INTRODUCTION TO NC MACHINE TOOLS Structure 1.1 Introduction Objectives 1.2 NC Machines 1.2.1 Types of NC Machine 1.2.2 Controlled Axes 1.2.3 Basic Components of NC Machines 1.2.4 Problems with Conventional
UNIT 1 INTRODUCTION TO NC MACHINE TOOLS Structure 1.1 Introduction Objectives 1.2 NC Machines 1.2.1 Types of NC Machine 1.2.2 Controlled Axes 1.2.3 Basic Components of NC Machines 1.2.4 Problems with Conventional
SAMPLE CHAPTERS UNESCO EOLSS DIGITAL INSTRUMENTS. García J. and García D.F. University of Oviedo, Spain
 DIGITAL INSTRUMENTS García J. and García D.F. University of Oviedo, Spain Keywords: analog-to-digital conversion, digital-to-analog conversion, data-acquisition systems, signal acquisition, signal conditioning,
DIGITAL INSTRUMENTS García J. and García D.F. University of Oviedo, Spain Keywords: analog-to-digital conversion, digital-to-analog conversion, data-acquisition systems, signal acquisition, signal conditioning,
Automatic Fire Fighting Monitors
 Automatic Fire Fighting Monitors Fire Protection Solutions Automatic Fire Fighting Monitors Foreword Automatic monitors are devices used to deliver large amounts of water or water/foam solution to remote
Automatic Fire Fighting Monitors Fire Protection Solutions Automatic Fire Fighting Monitors Foreword Automatic monitors are devices used to deliver large amounts of water or water/foam solution to remote
CORRECTION OF DYNAMIC WHEEL FORCES MEASURED ON ROAD SIMULATORS
 Pages 1 to 35 CORRECTION OF DYNAMIC WHEEL FORCES MEASURED ON ROAD SIMULATORS Bohdan T. Kulakowski and Zhijie Wang Pennsylvania Transportation Institute The Pennsylvania State University University Park,
Pages 1 to 35 CORRECTION OF DYNAMIC WHEEL FORCES MEASURED ON ROAD SIMULATORS Bohdan T. Kulakowski and Zhijie Wang Pennsylvania Transportation Institute The Pennsylvania State University University Park,
Control System Definition
 Control System Definition A control system consist of subsytems and processes (or plants) assembled for the purpose of controlling the outputs of the process. For example, a furnace produces heat as a
Control System Definition A control system consist of subsytems and processes (or plants) assembled for the purpose of controlling the outputs of the process. For example, a furnace produces heat as a
Similar benefits are also derived through modal testing of other space structures.
 PAGE 1 OF 5 PREFERRED RELIABILITY PRACTICES MODAL TESTING: MEASURING DYNAMIC STRUCTURAL CHARACTERISTICS Practice: Modal testing is a structural testing practice that provides low levels of mechanical excitation
PAGE 1 OF 5 PREFERRED RELIABILITY PRACTICES MODAL TESTING: MEASURING DYNAMIC STRUCTURAL CHARACTERISTICS Practice: Modal testing is a structural testing practice that provides low levels of mechanical excitation
SFS81 Series. Servo Finishing Stand PUSHCORP, INC. Dallas, Texas
 SFS81 Series Servo Finishing Stand PUSHCORP, INC. Dallas, Texas May, 2012 NEVER OPERATE THE SFS81 MANUALLY NEVER OPERATE THE SFS81 WITH PERSONEL IN THE WORKCELL DO NOT USE LUBRICATED AIR. This device requires
SFS81 Series Servo Finishing Stand PUSHCORP, INC. Dallas, Texas May, 2012 NEVER OPERATE THE SFS81 MANUALLY NEVER OPERATE THE SFS81 WITH PERSONEL IN THE WORKCELL DO NOT USE LUBRICATED AIR. This device requires
Electrical Symbols and Line Diagrams
 Electrical Symbols and Line Diagrams Chapter 3 Material taken from Chapter 3 of One-Line Diagrams One-line diagram a diagram that uses single lines and graphic symbols to indicate the path and components
Electrical Symbols and Line Diagrams Chapter 3 Material taken from Chapter 3 of One-Line Diagrams One-line diagram a diagram that uses single lines and graphic symbols to indicate the path and components
THERMAL ANEMOMETRY ELECTRONICS, SOFTWARE AND ACCESSORIES
 TSI and TSI logo are registered trademarks of TSI Incorporated. SmartTune is a trademark of TSI Incorporated. THERMAL ANEMOMETRY ELECTRONICS, SOFTWARE AND ACCESSORIES IFA 300 Constant Temperature Anemometry
TSI and TSI logo are registered trademarks of TSI Incorporated. SmartTune is a trademark of TSI Incorporated. THERMAL ANEMOMETRY ELECTRONICS, SOFTWARE AND ACCESSORIES IFA 300 Constant Temperature Anemometry
INTRODUCTION. Chapter 1. 1.1 Robotics
 Chapter 1 INTRODUCTION 1.1 Robotics Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications
Chapter 1 INTRODUCTION 1.1 Robotics Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications
Lecture 24: Oscillators. Clapp Oscillator. VFO Startup
 Whites, EE 322 Lecture 24 Page 1 of 10 Lecture 24: Oscillators. Clapp Oscillator. VFO Startup Oscillators are circuits that produce periodic output voltages, such as sinusoids. They accomplish this feat
Whites, EE 322 Lecture 24 Page 1 of 10 Lecture 24: Oscillators. Clapp Oscillator. VFO Startup Oscillators are circuits that produce periodic output voltages, such as sinusoids. They accomplish this feat
UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics
 UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics Physics 111.6 MIDTERM TEST #4 March 15, 2007 Time: 90 minutes NAME: (Last) Please Print (Given) STUDENT NO.: LECTURE SECTION (please
UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics Physics 111.6 MIDTERM TEST #4 March 15, 2007 Time: 90 minutes NAME: (Last) Please Print (Given) STUDENT NO.: LECTURE SECTION (please
The Gamma Match. 1 Equal Size Elements
 The Gamma Match The gamma match was originally invented as a means of feeding vertical monopole antennas for medium wave broadcasts, which were earthed at the base for lightning protection (see Figure
The Gamma Match The gamma match was originally invented as a means of feeding vertical monopole antennas for medium wave broadcasts, which were earthed at the base for lightning protection (see Figure
Dynamics of Multibody Systems: Conventional and Graph-Theoretic Approaches
 Dynamics of Multibody Systems: Conventional and Graph-Theoretic Approaches SD 65 John McPhee Systems Design Engineering University of Waterloo, Canada Summary of Course: 1. Review of kinematics and dynamics.
Dynamics of Multibody Systems: Conventional and Graph-Theoretic Approaches SD 65 John McPhee Systems Design Engineering University of Waterloo, Canada Summary of Course: 1. Review of kinematics and dynamics.
Unit 24: Applications of Pneumatics and Hydraulics
 Unit 24: Applications of Pneumatics and Hydraulics Unit code: J/601/1496 QCF level: 4 Credit value: 15 OUTCOME 2 TUTORIAL 2 HYDRAULIC AND PNEUMATIC CYLINDERS The material needed for outcome 2 is very extensive
Unit 24: Applications of Pneumatics and Hydraulics Unit code: J/601/1496 QCF level: 4 Credit value: 15 OUTCOME 2 TUTORIAL 2 HYDRAULIC AND PNEUMATIC CYLINDERS The material needed for outcome 2 is very extensive
Grounding Demystified
 Grounding Demystified 3-1 Importance Of Grounding Techniques 45 40 35 30 25 20 15 10 5 0 Grounding 42% Case 22% Cable 18% Percent Used Filter 12% PCB 6% Grounding 42% Case Shield 22% Cable Shielding 18%
Grounding Demystified 3-1 Importance Of Grounding Techniques 45 40 35 30 25 20 15 10 5 0 Grounding 42% Case 22% Cable 18% Percent Used Filter 12% PCB 6% Grounding 42% Case Shield 22% Cable Shielding 18%
OPERATIONAL AMPLIFIERS
 INTRODUCTION OPERATIONAL AMPLIFIERS The student will be introduced to the application and analysis of operational amplifiers in this laboratory experiment. The student will apply circuit analysis techniques
INTRODUCTION OPERATIONAL AMPLIFIERS The student will be introduced to the application and analysis of operational amplifiers in this laboratory experiment. The student will apply circuit analysis techniques
JPL ANOMALY ISSUES. Henry B. Garrett Jet Propulsion Laboratory California Institute of Technology Pasadena, CA, 91109
 JPL ANOMALY ISSUES Henry B. Garrett Pasadena, CA, 91109 Space Weather Anomaly Concerns for JPL Robotic Mission AGENDA Overview of Space Weather Anomalies on JPL Missions Space Weather Products used by
JPL ANOMALY ISSUES Henry B. Garrett Pasadena, CA, 91109 Space Weather Anomaly Concerns for JPL Robotic Mission AGENDA Overview of Space Weather Anomalies on JPL Missions Space Weather Products used by
DISPLAYING SMALL SURFACE FEATURES WITH A FORCE FEEDBACK DEVICE IN A DENTAL TRAINING SIMULATOR
 PROCEEDINGS of the HUMAN FACTORS AND ERGONOMICS SOCIETY 49th ANNUAL MEETING 2005 2235 DISPLAYING SMALL SURFACE FEATURES WITH A FORCE FEEDBACK DEVICE IN A DENTAL TRAINING SIMULATOR Geb W. Thomas and Li
PROCEEDINGS of the HUMAN FACTORS AND ERGONOMICS SOCIETY 49th ANNUAL MEETING 2005 2235 DISPLAYING SMALL SURFACE FEATURES WITH A FORCE FEEDBACK DEVICE IN A DENTAL TRAINING SIMULATOR Geb W. Thomas and Li
Types of Engineering Jobs
 What Do Engineers Do? Engineers apply the theories and principles of science and mathematics to the economical solution of practical technical problems. I.e. To solve problems Often their work is the link
What Do Engineers Do? Engineers apply the theories and principles of science and mathematics to the economical solution of practical technical problems. I.e. To solve problems Often their work is the link
Another Giant Leap. for Mankind. Lesson Development
 Lesson Development Apollo capsule (Image: NASA) Earth (Image: NASA) Instructional Objectives Students will decompose a geometric shape into smaller parts; apply the appropriate formulas for various geometric
Lesson Development Apollo capsule (Image: NASA) Earth (Image: NASA) Instructional Objectives Students will decompose a geometric shape into smaller parts; apply the appropriate formulas for various geometric