understanding sensors
|
|
|
- Linette Fleming
- 10 years ago
- Views:
Transcription
1 The LEGO MINDSTORMS NXT 2.0 robotics kit includes three types of sensors: Ultrasonic, Touch, and Color. You can use these sensors to build a robot that makes sounds when it sees you or to build a vehicle that drives around while avoiding walls or that follows the black line on the Test Pad. This second part of the book will teach you what you need to know in order to create working robots with sensors. To learn how to work with sensors, you ll upgrade the Explorer robot by adding several sensor attachments to it to create the Discovery robot shown in Figure 6-1. You ll learn to create programs for robots with sensors as you upgrade your robot with an Ultrasonic Sensor attachment. Once you have a good working knowledge of how to program with sensors, you ll continue creating more sensor attachments for this robot in Chapter 7. 6 understanding sensors what are sensors? LEGO MINDSTORMS robots can t actually see or feel the way humans do, but by adding sensors to them, they can collect and report information about the environment around them. Your programs can interpret sensor information in ways that will make your robot seem to respond to its environment as if it is experiencing it. For instance, you could create a program that makes the robot say Blue when one of its sensors sees a piece of blue paper. understanding the sensors in the NXT 2.0 kit Your NXT kit contains three sensors, as shown in Figure 6-2. The Ultrasonic Sensor reads the distance to objects, the Touch Sensors detect button presses, and the Figure 6-1: The Discovery robot: an enhanced version of the Explorer equipped with an Ultrasonic Sensor to make the robot see 1x 2x 1x Figure 6-2: The NXT kit comes with an Ultrasonic Sensor (left), two Touch Sensors (middle), and a Color Sensor (right).

2 Color Sensor detects the color of a surface (among other things, as you ll learn in Chapter 7). You connect the sensors to the NXT via input ports, numbered 1 through 4, as shown in Figure Figure 6-3: Sensors are connected to input ports. In this chapter, you ll explore the Ultrasonic Sensor, and you ll take a more detailed look at the other sensors in Chapter 7. The programming techniques that you ll learn for the Ultrasonic Sensor can be used for all the sensors in the kit. understanding the ultrasonic sensor Sensor The Ultrasonic Sensor serves as your robot s eyes. To see, the sensor measures the distance between it and other objects (as shown in Figure 6-4). The NXT retrieves the information from the sensor and uses its measurements in programs. For example, using input from this sensor, you could make your robot say Hello when the ultrasonic sensor reports an object in front of it that s nearer than 50 cm. As you ll learn in this and the following chapters, you can use the Ultrasonic Sensor in a number of interesting ways. For example, you can use it to make a vehicle avoid walls (Chapter 6), create an intruder alarm and detect targets to shoot at (Chapter 8), find objects to grab (Chapter 13), and even detect a ceiling so that a vertical climber knows to go down again (Chapter 15). creating the ultrasonic sensor attachment To begin, add an Ultrasonic Sensor to the Explorer robot as shown in the directions on the following page. NOTE If you have trouble following these steps, try disconnecting the motor cables and then reattaching them after you connect the Ultrasonic Sensor. Be sure to connect the Ultrasonic Sensor to input port 4 on the NXT using a medium-sized cable. polling sensors Without having to do any programming, you can view the sensor readings on the NXT s View menu. Gathering information from a sensor is sometimes referred to as polling. To poll a sensor, follow these steps: 1. Turn on your NXT, navigate to the View menu (Figure 6-5), and select the sensor you want to poll. 2. Choose Ultrasonic cm (or Ultrasonic Inch). 3. Select the input port the sensor is connected to (port 4), and you should see the sensor s measurement, which is 37 cm in this case. 37 cm DISCOVERY #19: MIND YOUR HEAD! Figure 6-4: The Ultrasonic Sensor is used to detect objects by measuring the distance to them. It can see things up to 200 cm (80 inches) away, but the farther the object is, the harder it is for the sensor to see it. When the sensor doesn t see anything, it reports a value of 255 cm. Difficulty: Easy How could you find out how far your robot is from the ceiling of a room? Use the View mode and the Ultrasonic Sensor to find out, making sure to point the sensor s eyes toward the ceiling while measuring. If you see only question marks on the screen, you might need to hold the sensor up a little closer to the ceiling. CHAPTER 6
.")
3 UNDERSTANDING SENSORS

4 Figure 6-5: Polling a sensor with the View menu programming with sensors You ve just seen how to poll a sensor yourself. Programs can also poll a sensor in order to use the sensor s data. As an example, you ll create a program that has the robot play a sound when the Ultrasonic Sensor sees something that s closer than 50 cm (20 inches), as shown in Figure 6-6. You can use several programming blocks to poll sensors including the Wait and Loop blocks as well as the Switch block. Sensor reading: 26 cm The program tells me to make a sound once the sensor reports a value below 50 cm. Figure 6-6: The program that runs on the NXT polls the sensor constantly. The program pauses until a sensor reading less than 50 cm is reported, at which point it plays a sound. sensors and the wait block You can use a Wait block to pause a program for several seconds, but also to pause until a sensor reading goes above or below a certain value. For example, Figure 6-7 shows a Wait block halting a program until the Ultrasonic Sensor detects a sensor value less than 50 cm. This value of 50 cm is called the trigger value. Once this trigger value is reached, the sensor is triggered, the Wait block stops waiting, and the next block in the program (i.e., a Sound block) runs. using the configuration panel You ve just learned how a Wait block is used to poll a sensor. Now you ll have a look at the configurations of this block. First select the Wait block configured to poll the Ultrasonic Sensor from the Programming Palette, as shown in Figure 6-7. (This is really just the Wait block you ve been using with the Control setting set to Sensor instead of Time.) You use the Port setting to select the input port to which the sensor is connected. You set the trigger value in the Distance setting in the Until box by entering its value or by dragging the slider to the left (closer) or right (farther). You use the Distance setting to select whether the block should wait until a value above (>) or below (<) the trigger value is reached. You use the Show setting to choose Centimeters or Inches. seeing the sensors and the wait block in action Now you ll create the Discovery-Wait program that plays a sound when the Ultrasonic Sensor sees something closer than 50 cm (20 inches), as shown in Figure 6-8. Before running this program, make sure that there is nothing in front of your robot. When you run the program, CHAPTER 6

5 Figure 6-7: The Wait block configured to poll an Ultrasonic Sensor a a b b Figure 6-8: The configuration of the blocks in the Discovery-Wait program. Experiment with the trigger value (50 cm here) by changing it to make the robot respond differently. nothing should happen at first, but as you move your hand in front of the Ultrasonic Sensor, the sensor should detect your hand once it s closer than 50 cm. Once your hand is detected, the Wait block should stop waiting, and your robot should play a sound. Now, before you proceed with other sensor programming techniques, try to solve Discovery #20 to get a better understanding of how to work with sensors. DISCOVERY #20: HELLO AND GOODBYE! Difficulty: Medium Can you create a program that has the robot say Hello when it detects your hand in front of the Ultrasonic Sensor and then Goodbye when you move your hand away? HINT Place and configure the sequence of the two blocks in the Discovery-Wait program (Figure 6-8) twice. Configure the first Wait block to wait until it sees something closer than 50 cm, and configure the second Wait block to wait until the sensor sees something farther than 50 cm. Once you ve confirmed that your program works, drag all the blocks into one Loop block so that your robot will repeatedly tell you when it detects your hand. UNDERSTANDING SENSORS

6 avoiding walls with the ultrasonic sensor The next program, Discovery-Avoid, will make the Discovery robot drive around a room and turn around when it sees something in order to prevent it from bumping into an obstacle such as a wall. You can see an overview of the program in Figure 6-9. Next you ll re-create the program with programming blocks. You can accomplish each action described in Figure 6-9 with one block. You ll use a Move block to turn on the motors with the Duration option set to Unlimited, and then you ll wait for the sensor to be triggered with a Wait block. (Note that while the program waits, the robot is still moving forward.) Once the robot sees something, you use a Move block to turn it around (and stop its unlimited movement). For turning around, the block s Duration option is set to a specific number of rotations. After the robot turns around, the program returns to the beginning, which is why you must place the three blocks used inside a Loop block that s configured to loop forever. Create the program now, as shown in Figure sensors and the loop block As you learned in Chapter 5, you can configure a Loop block in many ways. You can configure Loop blocks to loop a certain number of times, loop for a specified amount of time, or loop forever. These conditions indicate when a Loop block should stop looping. You can use a sensor to make a Loop block stop repeating. For example, you can repeat a sequence of Move blocks inside a Loop block until the Ultrasonic Sensor sees something that s closer than 25 cm (10 inches). Turn on the motors to go forward. Wait until the Ultrasonic Sensor sees something closer than 60 cm. Turn to the right. Repeat. Figure 6-9: The program flow for the Discovery-Avoid program. After turning right, the program returns to the start, and the robot moves forward again. a b c d a b c d Figure 6-10: The configuration of the blocks in the Discovery-Avoid program CHAPTER 6

7 DISCOVERY #21: AVOID WALLS AND A BAD MOOD! Difficulty: Easy Expand the Discovery-Avoid program by making it display a happy face on the NXT s display as it moves forward and by making it display a sad face when it is turning around to avoid the wall. HINT To do so, try putting two Display blocks somewhere in the Loop block. DISCOVERY #22: FOLLOW ME! Difficulty: Medium Make the Discovery robot follow you in a straight line. When you place your hand in front of the robot, it should stop, but when you move your hand away, it should move forward until it sees your hand again. TIP Have one block wait for the hand to come close (and then use a Move block to stop the robot s movement) and another block wait for the hand to move away, and then continue the robot s movement. Put all the blocks in a Loop block. DISCOVERY #23: HAPPY TUNES! Difficulty: Medium Use a Loop block to have the robot play a tune until the sensor spots someone watching, at which point the robot should scream and turn its head the other way. HINT You can use the My Block that you made in Discovery #16 in Chapter 5 for your tune. If you have yet to create your own tune, simply select a sound file from the list in a Sound block. To use a sensor to control when a loop should stop, select Sensor in the Control box, and then select the sensor (Ultrasonic) you would like to use and the port (4) to which the sensor is connected. Set the trigger value in the Until box to specify exactly when the loop should stop. You can see how to make these configurations in the following sample program. seeing the sensors and the loop block in action a b c Now make the Discovery-Loop program shown in Figure When you run this program, the robot should move back and forth repeatedly until the sensor spots something closer than 25 cm (10 inches). This program doesn t always respond to objects visible within 25 cm of the robot because it polls the sensor only once per repetition, just after all the blocks inside the loop complete. For this reason, when you quickly move your hand in front of the robot while the first block is running, the robot won t notice your hand. a b c Figure 6-11: The configuration of the blocks in the Discovery-Loop program UNDERSTANDING SENSORS

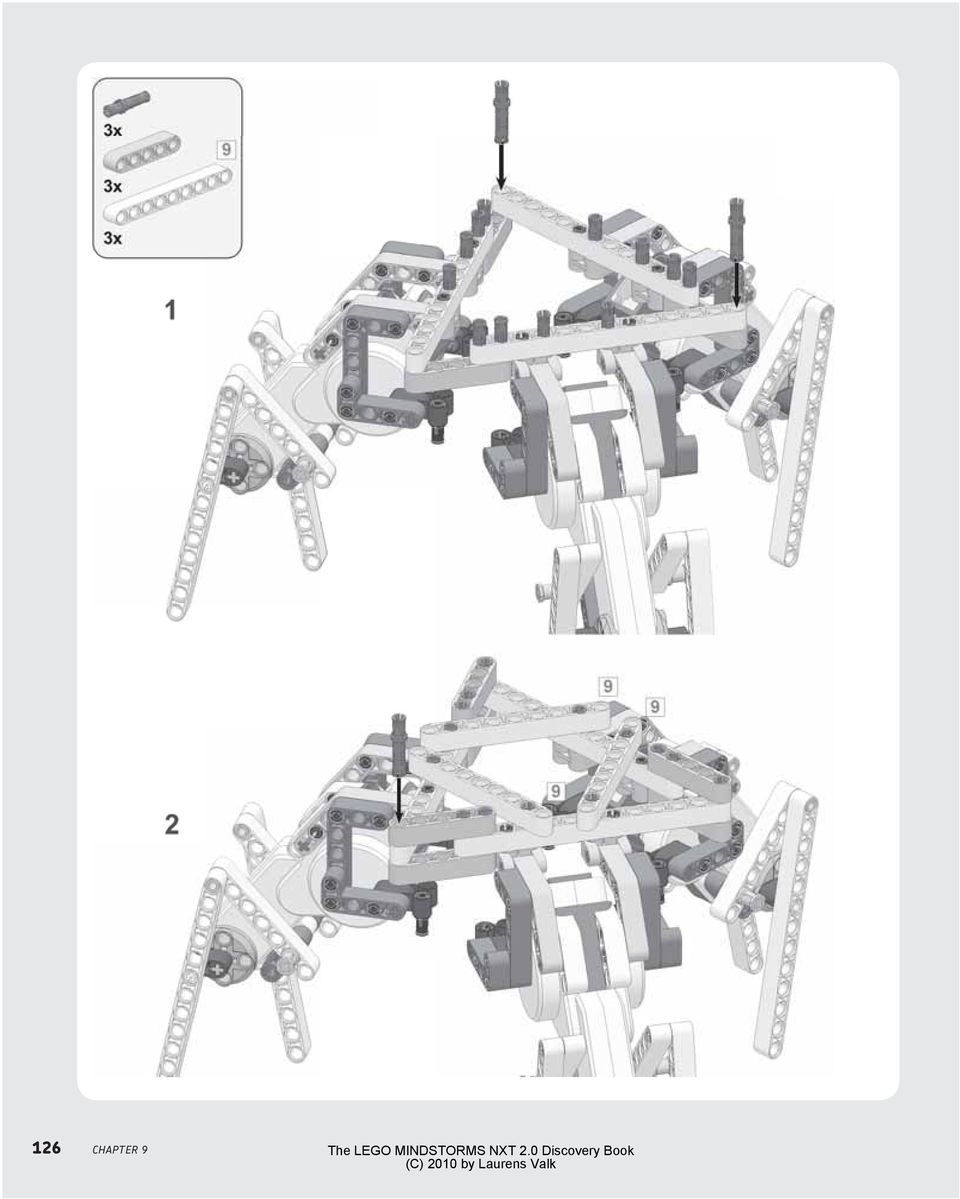
8 9 strider: the six-legged walking creature You can make interesting models that move on wheels, but it is also possible to make robots that walk. Such creations are slightly more challenging to make, but in this chapter you ll find instructions to build Strider, a six-legged walking creature, as shown in Figure 9-1. Once you finish building it, you ll program it to walk around and respond to human interaction. Figure 9-1: Strider

9 The Strider robot uses three identical motor assemblies to walk, each of which controls one pair of legs. The leg modules are interconnected with a triangle-shaped frame, which also carries the NXT with several sensors attached. Two Touch Sensors on the Strider act like antennas, detecting touches from objects or people in Strider s environment (they are not used as bumpers to prevent the robot from walking into something). The Ultrasonic Sensor allows the walker to measure the distance of nearby objects, while the Color Sensor in Light Sensor mode can detect whether it is dark or light outside. building strider We ll now move on to building the robot by following the instructions on the subsequent pages. Before you start building, select the pieces you ll need to complete the robot as shown in Figure 9-2. Figure 9-2: The required pieces to build the Strider CHAPTER 9

10 STRIDER: THE SIX-LEGGED WAL W KING CREATURE

11 CHAPTER 9

12 STRIDER: THE SIX-LEGGED WAL W KING CREATURE

13 CHAPTER 9
14 STRIDER: THE SIX-LEGGED WAL W KING CREATURE

C.I. La chaîne d information LES CAPTEURS. Page 1 sur 5
 LES CAPTEURS C.I. La chaîne d information The Touch Sensor gives your robot a sense of touch. The Touch Sensor detects when it is being pressed by something and when it is released again. Suggestions for
LES CAPTEURS C.I. La chaîne d information The Touch Sensor gives your robot a sense of touch. The Touch Sensor detects when it is being pressed by something and when it is released again. Suggestions for
How To Program An Nxt Mindstorms On A Computer Or Tablet Computer
 NXT Generation Robotics Introductory Worksheets School of Computing University of Kent Copyright c 2010 University of Kent NXT Generation Robotics These worksheets are intended to provide an introduction
NXT Generation Robotics Introductory Worksheets School of Computing University of Kent Copyright c 2010 University of Kent NXT Generation Robotics These worksheets are intended to provide an introduction
Tutorial for Programming the LEGO MINDSTORMS NXT
 Tutorial for Programming the LEGO MINDSTORMS NXT Table of contents 1 LEGO MINDSTORMS Overview 2 Hardware 2.1 The NXT Brick 2.2 The Servo Motors 2.3 The Sensors 3 Software 3.1 Starting a Program 3.2 The
Tutorial for Programming the LEGO MINDSTORMS NXT Table of contents 1 LEGO MINDSTORMS Overview 2 Hardware 2.1 The NXT Brick 2.2 The Servo Motors 2.3 The Sensors 3 Software 3.1 Starting a Program 3.2 The
Lego Robot Tutorials Touch Sensors
 Lego Robot Tutorials Touch Sensors Bumper Cars with a Touch Sensor With a touch sensor and some robot programming, you can make your robot search its way around the room. It can back up and turn around
Lego Robot Tutorials Touch Sensors Bumper Cars with a Touch Sensor With a touch sensor and some robot programming, you can make your robot search its way around the room. It can back up and turn around
2/26/2008. Sensors For Robotics. What is sensing? Why do robots need sensors? What is the angle of my arm? internal information
 Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
CONTENTS. What is ROBOTC? Section I: The Basics
 BEGINNERS CONTENTS What is ROBOTC? Section I: The Basics Getting started Configuring Motors Write Drive Code Download a Program to the Cortex Write an Autonomous Section II: Using Sensors Sensor Setup
BEGINNERS CONTENTS What is ROBOTC? Section I: The Basics Getting started Configuring Motors Write Drive Code Download a Program to the Cortex Write an Autonomous Section II: Using Sensors Sensor Setup
Advanced Programming with LEGO NXT MindStorms
 Advanced Programming with LEGO NXT MindStorms Presented by Tom Bickford Executive Director Maine Robotics Advanced topics in MindStorms Loops Switches Nested Loops and Switches Data Wires Program view
Advanced Programming with LEGO NXT MindStorms Presented by Tom Bickford Executive Director Maine Robotics Advanced topics in MindStorms Loops Switches Nested Loops and Switches Data Wires Program view
Line Tracking Basic Lesson
 Line Tracking Basic Lesson Now that you re familiar with a few of the key NXT sensors, let s do something a little more interesting with them. This lesson will show you how to use the Light Sensor to track
Line Tracking Basic Lesson Now that you re familiar with a few of the key NXT sensors, let s do something a little more interesting with them. This lesson will show you how to use the Light Sensor to track
North Texas FLL Coaches' Clinics. Beginning Programming October 2014. Patrick R. Michaud [email protected] republicofpi.org
 North Texas FLL Coaches' Clinics Beginning Programming October 2014 Patrick R. Michaud [email protected] republicofpi.org Goals Learn basics of Mindstorms programming Be able to accomplish some missions
North Texas FLL Coaches' Clinics Beginning Programming October 2014 Patrick R. Michaud [email protected] republicofpi.org Goals Learn basics of Mindstorms programming Be able to accomplish some missions
TETRIX Add-On Extensions. Encoder Programming Guide (ROBOTC )
") Introduction: In this extension, motor encoders will be added to the wheels of the Ranger Bot. The Ranger Bot with Encoders will be programmed to move forward until it detects an object, turn 90, and move
Introduction: In this extension, motor encoders will be added to the wheels of the Ranger Bot. The Ranger Bot with Encoders will be programmed to move forward until it detects an object, turn 90, and move
EV3 Programming. Overview for FLL Coaches. A very big high five to Tony Ayad
 EV3 Programming Overview for FLL Coaches A very big high five to Tony Ayad 2013 Nature s Fury Coach Call Basic programming of the Mindstorm EV3 Robot People Introductions Deborah Kerr & Faridodin Lajvardi
EV3 Programming Overview for FLL Coaches A very big high five to Tony Ayad 2013 Nature s Fury Coach Call Basic programming of the Mindstorm EV3 Robot People Introductions Deborah Kerr & Faridodin Lajvardi
Classroom Activities for the Busy Teacher: EV3
 Classroom Activities for the Busy Teacher: EV3 Table of Contents Chapter 1: Introduction... 1 Chapter 2: RileyRover Basics... 5 Chapter 3: Keeping Track... 13 Chapter 4: What is a Robot?... 17 Chapter
Classroom Activities for the Busy Teacher: EV3 Table of Contents Chapter 1: Introduction... 1 Chapter 2: RileyRover Basics... 5 Chapter 3: Keeping Track... 13 Chapter 4: What is a Robot?... 17 Chapter
Quick Start Guide to computer control and robotics using LEGO MINDSTORMS for Schools
 Quick Start Guide to computer control and robotics using LEGO MINDSTORMS for Schools www.lego.com/education/mindstorms LEGO, the LEGO logo and MINDSTORMS are trademarks of the LEGO Group. 2004 The LEGO
Quick Start Guide to computer control and robotics using LEGO MINDSTORMS for Schools www.lego.com/education/mindstorms LEGO, the LEGO logo and MINDSTORMS are trademarks of the LEGO Group. 2004 The LEGO
Can Traffic Accidents be eliminated by Robots?
 Can Traffic Accidents be eliminated by Robots? Elementary Science and Technology Grade 7 Teaching- learning Module for Unit Light and Sound Abstract This modules leads to a decision making activity related
Can Traffic Accidents be eliminated by Robots? Elementary Science and Technology Grade 7 Teaching- learning Module for Unit Light and Sound Abstract This modules leads to a decision making activity related
The second goal is to provide a list of tips, tricks, and best known methods that have been discovered over the life span of the course.
 ECE1882 LEGO NXT Brick Programming Guide Introduction This document was written with two goals in mind. The first is to orient a new user to the graphical programming language used in the MindSpring NXT
ECE1882 LEGO NXT Brick Programming Guide Introduction This document was written with two goals in mind. The first is to orient a new user to the graphical programming language used in the MindSpring NXT
SE05: Getting Started with Cognex DataMan Bar Code Readers - Hands On Lab Werner Solution Expo April 8 & 9
 SE05: Getting Started with Cognex DataMan Bar Code Readers - Hands On Lab Werner Solution Expo April 8 & 9 Learning Goals: At the end of this lab, the student should have basic familiarity with the DataMan
SE05: Getting Started with Cognex DataMan Bar Code Readers - Hands On Lab Werner Solution Expo April 8 & 9 Learning Goals: At the end of this lab, the student should have basic familiarity with the DataMan
The Basics of Robot Mazes Teacher Notes
 The Basics of Robot Mazes Teacher Notes Why do robots solve Mazes? A maze is a simple environment with simple rules. Solving it is a task that beginners can do successfully while learning the essentials
The Basics of Robot Mazes Teacher Notes Why do robots solve Mazes? A maze is a simple environment with simple rules. Solving it is a task that beginners can do successfully while learning the essentials
Introduction to programming moway
 moway Contents Contents... 1 Introduction... 2 Flowcharts... 2 Movement blocks... 5 Conditionals... 6 Loops... 7 AND/OR Operators... 8 Setting flowcharts in order... 10 www.moway-robot.com 1 Introduction
moway Contents Contents... 1 Introduction... 2 Flowcharts... 2 Movement blocks... 5 Conditionals... 6 Loops... 7 AND/OR Operators... 8 Setting flowcharts in order... 10 www.moway-robot.com 1 Introduction
Building Instructions: Maze Robot
 Building Instructions: Maze Robot Basic Design from: Building Robots with Lego Mindstorms Modifications by: David Wang Diagrams and Instructions by: David Wang Diagrams and Instructions generated by: MLCad,
Building Instructions: Maze Robot Basic Design from: Building Robots with Lego Mindstorms Modifications by: David Wang Diagrams and Instructions by: David Wang Diagrams and Instructions generated by: MLCad,
Speed Based on Volume Values & Assignment (Part 1)
") Speed Based on Volume Values & Assignment (Part 1) The Sound Sensor is the last of the standard NXT sensors. In essence it s a kind of microphone which senses amplitude (how loud or soft a sound is), but
Speed Based on Volume Values & Assignment (Part 1) The Sound Sensor is the last of the standard NXT sensors. In essence it s a kind of microphone which senses amplitude (how loud or soft a sound is), but
Tutorial: Biped Character in 3D Studio Max 7, Easy Animation
 Tutorial: Biped Character in 3D Studio Max 7, Easy Animation Written by: Ricardo Tangali 1. Introduction:... 3 2. Basic control in 3D Studio Max... 3 2.1. Navigating a scene:... 3 2.2. Hide and Unhide
Tutorial: Biped Character in 3D Studio Max 7, Easy Animation Written by: Ricardo Tangali 1. Introduction:... 3 2. Basic control in 3D Studio Max... 3 2.1. Navigating a scene:... 3 2.2. Hide and Unhide
Programming LEGO NXT Robots using NXC
 Programming LEGO NXT Robots using NXC This text programming language derived from C language is bended together with IDE BricxCC on standard firmware LEGO Mindstorms. This can be very convenient for those,
Programming LEGO NXT Robots using NXC This text programming language derived from C language is bended together with IDE BricxCC on standard firmware LEGO Mindstorms. This can be very convenient for those,
Blender Notes. Introduction to Digital Modelling and Animation in Design Blender Tutorial - week 9 The Game Engine
 Blender Notes Introduction to Digital Modelling and Animation in Design Blender Tutorial - week 9 The Game Engine The Blender Game Engine This week we will have an introduction to the Game Engine build
Blender Notes Introduction to Digital Modelling and Animation in Design Blender Tutorial - week 9 The Game Engine The Blender Game Engine This week we will have an introduction to the Game Engine build
LEAD GENERATION STRATEGY
 LEAD GENERATION STRATEGY Steps: 1. Create your free guide 2. Upload it to your website and grab the URL 2. Create a separate page on your website 3. Create a webform in your list manager and upload to
LEAD GENERATION STRATEGY Steps: 1. Create your free guide 2. Upload it to your website and grab the URL 2. Create a separate page on your website 3. Create a webform in your list manager and upload to
The Photosynth Photography Guide
 The Photosynth Photography Guide Creating the best synth starts with the right photos. This guide will help you understand how to take photos that Photosynth can use to best advantage. Reading it could
The Photosynth Photography Guide Creating the best synth starts with the right photos. This guide will help you understand how to take photos that Photosynth can use to best advantage. Reading it could
Introduction WELCOME TO LEGO MINDSTORMS EDUCATION
 NXT User Guide Introduction WELCOME TO LEGO MINDSTORMS EDUCATION LEGO MINDSTORMS Education is the next generation in educational robotics, enabling students to discover Science, Technology, Engineering
NXT User Guide Introduction WELCOME TO LEGO MINDSTORMS EDUCATION LEGO MINDSTORMS Education is the next generation in educational robotics, enabling students to discover Science, Technology, Engineering
Testing Robots Using the VEXnet Upgrade
 Testing Robots Using the VEXnet Upgrade This document is an inspection guide for VEX v1.5 microcontroller-based robots. Use this document to test if a robot using the VEXnet Upgrade is competition ready.
Testing Robots Using the VEXnet Upgrade This document is an inspection guide for VEX v1.5 microcontroller-based robots. Use this document to test if a robot using the VEXnet Upgrade is competition ready.
SolarTrak Users Guide GPS Satellites
 SolarTrak Users Guide GPS Satellites Your PC or Smartphone How SolarTrak Works 1. GPS signal received from the Satellite Cell Tower SolarTrak Tracker installed on Equipment 2. Communication is established
SolarTrak Users Guide GPS Satellites Your PC or Smartphone How SolarTrak Works 1. GPS signal received from the Satellite Cell Tower SolarTrak Tracker installed on Equipment 2. Communication is established
Your EdVenture into Robotics You re a Programmer
 Your EdVenture into Robotics You re a Programmer Introduction... 3 Getting started... 4 Meet EdWare... 8 EdWare icons... 9 EdVenture 1- Flash a LED... 10 EdVenture 2 Beep!! Beep!!... 12 EdVenture 3 Robots
Your EdVenture into Robotics You re a Programmer Introduction... 3 Getting started... 4 Meet EdWare... 8 EdWare icons... 9 EdVenture 1- Flash a LED... 10 EdVenture 2 Beep!! Beep!!... 12 EdVenture 3 Robots
CHAPTER 12 NXT Remote Control
 Chapter 12 NXT Remote Control In this chapter, you ll create an app that turns your Android phone into a remote control for a LEGO MINDSTORMS NXT robot. The app will have buttons for driving the robot
Chapter 12 NXT Remote Control In this chapter, you ll create an app that turns your Android phone into a remote control for a LEGO MINDSTORMS NXT robot. The app will have buttons for driving the robot
Connections and Setup
 9242_14_Ch12_eng 6/11/07 9:36 AM Page 1 Connections and Setup HOW TO CONNECT YOUR SATELLITE RECEIVER Do you have a handful of cables and a head full of questions? This chapter is the perfect place to find
9242_14_Ch12_eng 6/11/07 9:36 AM Page 1 Connections and Setup HOW TO CONNECT YOUR SATELLITE RECEIVER Do you have a handful of cables and a head full of questions? This chapter is the perfect place to find
Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205]
![Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205]](/thumbs/40/21161302.jpg "Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205]") Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205] Users Manual Robokits India [email protected] http://www.robokitsworld.com Page 1 Bluetooth + USB 16 Servo Controller is used to control up to
Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205] Users Manual Robokits India [email protected] http://www.robokitsworld.com Page 1 Bluetooth + USB 16 Servo Controller is used to control up to
What You ll Learn. CHAPTER 12 Robot Remote. The BluetoothClient component for connecting to the NXT
 CHAPTER 12 Robot Remote Figure 12-1. In this chapter, you ll create an app that turns your Android phone into a remote control for a LEGO MINDSTORMS NXT robot. The app will have buttons for driving the
CHAPTER 12 Robot Remote Figure 12-1. In this chapter, you ll create an app that turns your Android phone into a remote control for a LEGO MINDSTORMS NXT robot. The app will have buttons for driving the
Workshop NXT Programming For Beginners
 Workshop NXT Programming For Beginners Version 1.1 Summer, 2012 Based on the Lego NXT Robotics System Copyright 2012, Neil Rosenberg [email protected] 828-484-4444 Weaverville, NC All Rights Reserved This
Workshop NXT Programming For Beginners Version 1.1 Summer, 2012 Based on the Lego NXT Robotics System Copyright 2012, Neil Rosenberg [email protected] 828-484-4444 Weaverville, NC All Rights Reserved This
e d u c a t i o n NXT Solar Station
 e d u c a t i o n NXT Solar Station de LEGO Group. 2010 The LEGO Group. e d u c a t i o n NXT Solar Station Description Investigating the NXT Solar Station s ability to generate power by data logging wattage
e d u c a t i o n NXT Solar Station de LEGO Group. 2010 The LEGO Group. e d u c a t i o n NXT Solar Station Description Investigating the NXT Solar Station s ability to generate power by data logging wattage
SwannEye HD Plug & Play Wi-Fi Security Camera Quick Start Guide Welcome! Lets get started.
 EN SwannEye HD Plug & Play Wi-Fi Security Camera Quick Start Guide Welcome! Lets get started. QHADS453080414E Swann 2014 1 1 Introduction Congratulations on your purchase of this SwannEye HD Plug & Play
EN SwannEye HD Plug & Play Wi-Fi Security Camera Quick Start Guide Welcome! Lets get started. QHADS453080414E Swann 2014 1 1 Introduction Congratulations on your purchase of this SwannEye HD Plug & Play
User Manual GSM Alarm System. www.deltasecurity.cn. All rights reserved by Delta Security Co., Ltd
 User Manual GSM Alarm System All rights reserved by Delta Security Co., Ltd Dear Clients, Thank you for using our GSM Alarm System. We are committed to giving you the best home security available today
User Manual GSM Alarm System All rights reserved by Delta Security Co., Ltd Dear Clients, Thank you for using our GSM Alarm System. We are committed to giving you the best home security available today
CHAPTER 1 HelloPurr. The chapter covers the following topics:
 CHAPTER 1 HelloPurr This chapter gets you started building apps. It presents the key elements of App Inventor, the Component Designer and the Blocks Editor, and leads you through the basic steps of creating
CHAPTER 1 HelloPurr This chapter gets you started building apps. It presents the key elements of App Inventor, the Component Designer and the Blocks Editor, and leads you through the basic steps of creating
Quick Start Guide. Vonage Device Motorola VT2142
 Quick Start Guide Vonage Device Motorola VT2142 Before you begin 1. If you purchased your Vonage Device from a retail store, you must first activate your Vonage phone service. (You will need to provide
Quick Start Guide Vonage Device Motorola VT2142 Before you begin 1. If you purchased your Vonage Device from a retail store, you must first activate your Vonage phone service. (You will need to provide
Introduction WELCOME TO LEGO MINDSTORMS EDUCATION
 NXT User Guide Introduction WELCOME TO LEGO MINDSTORMS EDUCATION LEGO MINDSTORMS Education is the next generation in educational robotics, enabling students to discover Science, Technology, Engineering
NXT User Guide Introduction WELCOME TO LEGO MINDSTORMS EDUCATION LEGO MINDSTORMS Education is the next generation in educational robotics, enabling students to discover Science, Technology, Engineering
SolidWorks Building Blocks Tutorial. Toy-car
 SolidWorks Building Blocks Tutorial Toy-car From the age of until the age of For use with SolidWorks Educational Release 2010-2011 This tutorial was developed for SolidWorks Worldwide and may be used by
SolidWorks Building Blocks Tutorial Toy-car From the age of until the age of For use with SolidWorks Educational Release 2010-2011 This tutorial was developed for SolidWorks Worldwide and may be used by
Getting Started in Tinkercad
 Getting Started in Tinkercad By Bonnie Roskes, 3DVinci Tinkercad is a fun, easy to use, web-based 3D design application. You don t need any design experience - Tinkercad can be used by anyone. In fact,
Getting Started in Tinkercad By Bonnie Roskes, 3DVinci Tinkercad is a fun, easy to use, web-based 3D design application. You don t need any design experience - Tinkercad can be used by anyone. In fact,
Getting Started. Getting Started with Time Warner Cable Business Class. Voice Manager. A Guide for Administrators and Users
 Getting Started Getting Started with Time Warner Cable Business Class Voice Manager A Guide for Administrators and Users Table of Contents Table of Contents... 2 How to Use This Guide... 3 Administrators...
Getting Started Getting Started with Time Warner Cable Business Class Voice Manager A Guide for Administrators and Users Table of Contents Table of Contents... 2 How to Use This Guide... 3 Administrators...
Programming the VEX Robot
 Preparing for Programming Setup Before we can begin programming, we have to set up the computer we are using and the robot/controller. We should already have: Windows (XP or later) system with easy-c installed
Preparing for Programming Setup Before we can begin programming, we have to set up the computer we are using and the robot/controller. We should already have: Windows (XP or later) system with easy-c installed
Quick Start Guide. Vonage VWR Device
 Quick Start Guide Vonage VWR Device Before you begin 1. If you purchased your Vonage Device from a retail store, you must first activate your Vonage phone service. (You will need to provide the MAC ID
Quick Start Guide Vonage VWR Device Before you begin 1. If you purchased your Vonage Device from a retail store, you must first activate your Vonage phone service. (You will need to provide the MAC ID
INSTRUCTION MANUAL Neo Coolcam IP Camera
 INSTRUCTION MANUAL Neo Coolcam IP Camera Revised: June 28, 2013 Thank you for purchasing from SafetyBasement.com! We appreciate your business. We made this simple manual to help you enjoy your new product
INSTRUCTION MANUAL Neo Coolcam IP Camera Revised: June 28, 2013 Thank you for purchasing from SafetyBasement.com! We appreciate your business. We made this simple manual to help you enjoy your new product
So you want to create an Email a Friend action
 So you want to create an Email a Friend action This help file will take you through all the steps on how to create a simple and effective email a friend action. It doesn t cover the advanced features;
So you want to create an Email a Friend action This help file will take you through all the steps on how to create a simple and effective email a friend action. It doesn t cover the advanced features;
Mini Box Easy Setup Guide
 University of Kentucky Mini Box Easy Setup Guide Installation Operation Troubleshooting Introduction To bring you better service now and in the future Insight is upgrading to an All-Digital network All-Digital
University of Kentucky Mini Box Easy Setup Guide Installation Operation Troubleshooting Introduction To bring you better service now and in the future Insight is upgrading to an All-Digital network All-Digital
Alarm Security Kit - NVR
 Alarm Security Kit - NVR EN The alarm configuration menu (see above right screenshot) allows you to configure and change settings for the PIR movement sensors, window/door sensors, remote controls (key
Alarm Security Kit - NVR EN The alarm configuration menu (see above right screenshot) allows you to configure and change settings for the PIR movement sensors, window/door sensors, remote controls (key
How To Turn On A Robot On A Computer On A Black Box On A Pc Or Macbook
 Written Directions for EV3 Line Follow (Heaviside Algorithm) Description: Given a black line and the light sensor on the EV3 robot, we want to have the light sensor read values from the reflected light.
Written Directions for EV3 Line Follow (Heaviside Algorithm) Description: Given a black line and the light sensor on the EV3 robot, we want to have the light sensor read values from the reflected light.
Fish Chomp. Level. Activity Checklist Follow these INSTRUCTIONS one by one. Test Your Project Click on the green flag to TEST your code
 Introduction: We re going to make a game! Guide the large Hungry Fish and try to eat all the prey that are swimming around. Activity Checklist Follow these INSTRUCTIONS one by one Click on the green flag
Introduction: We re going to make a game! Guide the large Hungry Fish and try to eat all the prey that are swimming around. Activity Checklist Follow these INSTRUCTIONS one by one Click on the green flag
Eye Tracking Instructions
 Eye Tracking Instructions [1] Check to make sure that the eye tracker is properly connected and plugged in. Plug in the eye tracker power adaptor (the green light should be on. Make sure that the yellow
Eye Tracking Instructions [1] Check to make sure that the eye tracker is properly connected and plugged in. Plug in the eye tracker power adaptor (the green light should be on. Make sure that the yellow
Brief Introduction... 2. Thump Bluetooth Wireless Headphones features... 2. What s in the package?... 2. Bluetooth Wireless technology...
 Thump User Guide Thank you for choosing the Thump Bluetooth Wireless Headphones. Please read this guide carefully to ensure your ease in using your Thump features fully. Reproduction, transfer, distribution
Thump User Guide Thank you for choosing the Thump Bluetooth Wireless Headphones. Please read this guide carefully to ensure your ease in using your Thump features fully. Reproduction, transfer, distribution
Receiver and Remote Controls
 9242_4_Ch2_eng 6/11/07 9:29 AM Page 1 2 Receiver and Remote Controls ABOUT YOUR SATELLITE RECEIVER This chapter helps you get to know your remote control, which lets you use all the functions of your receiver.
9242_4_Ch2_eng 6/11/07 9:29 AM Page 1 2 Receiver and Remote Controls ABOUT YOUR SATELLITE RECEIVER This chapter helps you get to know your remote control, which lets you use all the functions of your receiver.
Video Baby Monitor System. User Guide
 Video Baby Monitor System User Guide What s inside Welcome!... 2 Getting started... 3 Tour of the system... 7 Everyday use...13 Cameras... 14 Motion/Alerts... 18 Recording... 21 Playing Back Pictures and
Video Baby Monitor System User Guide What s inside Welcome!... 2 Getting started... 3 Tour of the system... 7 Everyday use...13 Cameras... 14 Motion/Alerts... 18 Recording... 21 Playing Back Pictures and
Get the message wherever you are Call Minder User Guide
 Get the message wherever you are Call Minder User Guide Now with Call Minder Let your mobile keep you in touch See page for more details. Use Remote Access to listen to your messages from a different phone
Get the message wherever you are Call Minder User Guide Now with Call Minder Let your mobile keep you in touch See page for more details. Use Remote Access to listen to your messages from a different phone
ABOUT YOUR SATELLITE RECEIVER
 2 Satellite Receiver ABOUT YOUR SATELLITE RECEIVER This chapter gives you an overview and a description of your satellite receiver. SATELLITE RECEIVER OVERVIEW SINGLE AND DUAL MODES REMOTE CONTROL SATELLITE
2 Satellite Receiver ABOUT YOUR SATELLITE RECEIVER This chapter gives you an overview and a description of your satellite receiver. SATELLITE RECEIVER OVERVIEW SINGLE AND DUAL MODES REMOTE CONTROL SATELLITE
Tutorial 1. Introduction to robot
 Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
ROVs in a Bucket Building an Underwater Robot. 3.0 ROV Thrusters & Propeller Attachment. 3.1 Propulsion
 3.0 ROV Thrusters & Propeller Attachment 3.1 Propulsion ROV s move forward and back, up and down, and to the left and right. They can make all of these moves without the benefit of a rudder. With three
3.0 ROV Thrusters & Propeller Attachment 3.1 Propulsion ROV s move forward and back, up and down, and to the left and right. They can make all of these moves without the benefit of a rudder. With three
CREATE A 3D MOVIE IN DIRECTOR
 CREATE A 3D MOVIE IN DIRECTOR 2 Building Your First 3D Movie in Director Welcome to the 3D tutorial for Adobe Director. Director includes the option to create three-dimensional (3D) images, text, and animations.
CREATE A 3D MOVIE IN DIRECTOR 2 Building Your First 3D Movie in Director Welcome to the 3D tutorial for Adobe Director. Director includes the option to create three-dimensional (3D) images, text, and animations.
VIDEO COMMUNICATION SYSTEM-TECHNICAL DOCUMENTATION. Tracking Camera (PCSA-CTG70/CTG70P) PCS-G70/G70P All
 PCS-G70/G70P All") Tracking Camera () PCS-G70/G70P All Introduction The Tracking Camera is a camera unit dedicated to the PCS-G70/G70P. It provides the Voice-Directional Detection function, the Face Recognition function,
Tracking Camera () PCS-G70/G70P All Introduction The Tracking Camera is a camera unit dedicated to the PCS-G70/G70P. It provides the Voice-Directional Detection function, the Face Recognition function,
Recipes4Success. Animate a Rocket Ship. Frames 6 - Drawing Tools
 Recipes4Success You can use the drawing tools and path animation tools in Frames to create illustrated cartoons. In this Recipe, you will draw and animate a rocket ship. 2014. All Rights Reserved. This
Recipes4Success You can use the drawing tools and path animation tools in Frames to create illustrated cartoons. In this Recipe, you will draw and animate a rocket ship. 2014. All Rights Reserved. This
Connections and Setup
 12 Connections and Setup HOW TO CONNECT YOUR SATELLITE RECEIVER Use the information in this chapter to connect your receiver to other equipment. CONNECTING TO THE NEARBY HDTV (TV1) CONNECTING TO THE REMOTE
12 Connections and Setup HOW TO CONNECT YOUR SATELLITE RECEIVER Use the information in this chapter to connect your receiver to other equipment. CONNECTING TO THE NEARBY HDTV (TV1) CONNECTING TO THE REMOTE
Step by step guide to installing your own Ku Band satellite dish
 Step by step guide to installing your own Ku Band satellite dish If you don't feel comfortable installing your own system, your local TV Aerial or Handyman can easily follow these helpful guidelines for
Step by step guide to installing your own Ku Band satellite dish If you don't feel comfortable installing your own system, your local TV Aerial or Handyman can easily follow these helpful guidelines for
Central England People First s friendly guide to downloading
 Central England People First s friendly guide to downloading What is Skype? Skype is a computer programme that turns your computer into a telephone. This means that you can speak to other people using
Central England People First s friendly guide to downloading What is Skype? Skype is a computer programme that turns your computer into a telephone. This means that you can speak to other people using
G-100/200 Operation & Installation
 G-100/200 Operation & Installation 2 Contents 7 Installation 15 Getting Started 16 GPS Mode Setup 18 Wheel Sensor Mode Setup 20 Fuel Calibration 23 Basic Operation 24 Telemetery Screen 27 Entering a Distance
G-100/200 Operation & Installation 2 Contents 7 Installation 15 Getting Started 16 GPS Mode Setup 18 Wheel Sensor Mode Setup 20 Fuel Calibration 23 Basic Operation 24 Telemetery Screen 27 Entering a Distance
Additional Guides. TETRIX Getting Started Guide NXT Brick Guide
 Preparing the NXT Brick Now that a functional program has been created, it must be transferred to the NXT Brick and then run. This is a perfect time to take a look at the NXT Brick in detail. The NXT Brick
Preparing the NXT Brick Now that a functional program has been created, it must be transferred to the NXT Brick and then run. This is a perfect time to take a look at the NXT Brick in detail. The NXT Brick
SHOOTING FUNDAMENTALS
 SHOOTING FUNDAMENTALS BY ROB BABCOCK GENERAL MANAGER, TORONTO RAPTORS BASKETBALL CLUB I strongly believe that the most successful basketball teams are the teams that play the game for the true values the
SHOOTING FUNDAMENTALS BY ROB BABCOCK GENERAL MANAGER, TORONTO RAPTORS BASKETBALL CLUB I strongly believe that the most successful basketball teams are the teams that play the game for the true values the
Error! Bookmark not defined. Error! Bookmark not defined. Error! Bookmark not defined.
 Remote Lighting Kit Table of Contents Lighting Kit Overview 2 System Requirements 3 Basic Concepts of Wireless Routers and Networks 4 Basic Concepts of Network Light Bulbs 8 Planning Your Lighting Network
Remote Lighting Kit Table of Contents Lighting Kit Overview 2 System Requirements 3 Basic Concepts of Wireless Routers and Networks 4 Basic Concepts of Network Light Bulbs 8 Planning Your Lighting Network
Wall Mount Installation and Use
 Wall Mount Installation and Use 1. Introduction The Wall Mount works the same way for all Touchfire cases - the one or two row magnet strip on the back of the case is magnetically attracted to the Wall
Wall Mount Installation and Use 1. Introduction The Wall Mount works the same way for all Touchfire cases - the one or two row magnet strip on the back of the case is magnetically attracted to the Wall
HPUG_1014. Shaw Home Phone. User Guide
 HPUG_1014 Shaw Home Phone. User Guide Hello. Welcome to the wonderful world of Shaw Home Phone. This tiny book tells you every detail you need to know to use all of your new phone features like a superstar.
HPUG_1014 Shaw Home Phone. User Guide Hello. Welcome to the wonderful world of Shaw Home Phone. This tiny book tells you every detail you need to know to use all of your new phone features like a superstar.
Cisco IP 7961 Telephone & Unity Voicemail User s Guide
 Cisco IP 7961 Telephone & Unity Voicemail User s Guide Office of Information Technology Telecommunications and Network Operations Table of Contents General Information...1 Understanding Lines vs. Calls...2
Cisco IP 7961 Telephone & Unity Voicemail User s Guide Office of Information Technology Telecommunications and Network Operations Table of Contents General Information...1 Understanding Lines vs. Calls...2
ROBOTC Software Inspection Guide with Additional Help Documentation
 VEX ROBOTICS COMPETITION ROBOTC Software Inspection Guide with Additional Help Documentation VEX Cortex Software Inspection Steps: 1. Cortex Firmware Inspection using ROBOTC 2. Testing Cortex Robots using
VEX ROBOTICS COMPETITION ROBOTC Software Inspection Guide with Additional Help Documentation VEX Cortex Software Inspection Steps: 1. Cortex Firmware Inspection using ROBOTC 2. Testing Cortex Robots using
EasyC. Programming Tips
 EasyC Programming Tips PART 1: EASYC PROGRAMMING ENVIRONMENT The EasyC package is an integrated development environment for creating C Programs and loading them to run on the Vex Control System. Its Opening
EasyC Programming Tips PART 1: EASYC PROGRAMMING ENVIRONMENT The EasyC package is an integrated development environment for creating C Programs and loading them to run on the Vex Control System. Its Opening
BLU Vivo 4.3 User Manual
 BLU Vivo 4.3 User Manual 1 Table of Contents Phone Safety Information... 3 Appearance and Key Functions... 4 Installation and Charging... 5 Phone Operation... 7 Communication... 10 Camera... 11 Gallery...
BLU Vivo 4.3 User Manual 1 Table of Contents Phone Safety Information... 3 Appearance and Key Functions... 4 Installation and Charging... 5 Phone Operation... 7 Communication... 10 Camera... 11 Gallery...
Digital Phone @ Home Tutorial
 Digital Phone @ Home Tutorial 2 Table of Contents Quick Start Guide... 4 Making Phone Calls... 5 Voicemail Setup... 6 Setup instructions:... 6 To Check Messages:... 6 Quick Key Reference:... 6 Customer
Digital Phone @ Home Tutorial 2 Table of Contents Quick Start Guide... 4 Making Phone Calls... 5 Voicemail Setup... 6 Setup instructions:... 6 To Check Messages:... 6 Quick Key Reference:... 6 Customer
Turtle Beach Grip 500 Laser Gaming Mouse. User Guide
 Turtle Beach Grip 500 Laser Gaming Mouse User Guide Table of Contents Table of Contents... 4 Introduction... 5 Installation... 5 Opening and Closing Grip 500 Configuration Software... 6 Configuring Your
Turtle Beach Grip 500 Laser Gaming Mouse User Guide Table of Contents Table of Contents... 4 Introduction... 5 Installation... 5 Opening and Closing Grip 500 Configuration Software... 6 Configuring Your
Hello Purr. What You ll Learn
 Chapter 1 Hello Purr This chapter gets you started building apps. It presents the key elements of App Inventor the Component Designer and the Blocks Editor and leads you through the basic steps of creating
Chapter 1 Hello Purr This chapter gets you started building apps. It presents the key elements of App Inventor the Component Designer and the Blocks Editor and leads you through the basic steps of creating
m ac romed ia Fl a s h Curriculum Guide
 m ac romed ia Fl a s h Curriculum Guide 1997 1998 Macromedia, Inc. All rights reserved. Macromedia, the Macromedia logo, Dreamweaver, Director, Fireworks, Flash, Fontographer, FreeHand, and Xtra are trademarks
m ac romed ia Fl a s h Curriculum Guide 1997 1998 Macromedia, Inc. All rights reserved. Macromedia, the Macromedia logo, Dreamweaver, Director, Fireworks, Flash, Fontographer, FreeHand, and Xtra are trademarks
Hosting Users Guide 2011
 Hosting Users Guide 2011 eofficemgr technology support for small business Celebrating a decade of providing innovative cloud computing services to small business. Table of Contents Overview... 3 Configure
Hosting Users Guide 2011 eofficemgr technology support for small business Celebrating a decade of providing innovative cloud computing services to small business. Table of Contents Overview... 3 Configure
Fruit Machine. Level. Activity Checklist Follow these INSTRUCTIONS one by one. Test Your Project Click on the green flag to TEST your code
 Introduction: This is a game that has three sprites that change costume. You have to stop them when they re showing the same picture (like a fruit machine!). Activity Checklist Follow these INSTRUCTIONS
Introduction: This is a game that has three sprites that change costume. You have to stop them when they re showing the same picture (like a fruit machine!). Activity Checklist Follow these INSTRUCTIONS
QUICK START GUIDE FOR VIDEO CONFERENCING SET-UP. For the Boulder and the Denver Conference Rooms 6 th Floor 1800 Grant St. Denver
 QUICK START GUIDE FOR VIDEO CONFERENCING SET-UP For the Boulder and the Denver Conference Rooms 6 th Floor 1800 Grant St. Denver I. Video Conference Hardware and Components The what, where, and functionality
QUICK START GUIDE FOR VIDEO CONFERENCING SET-UP For the Boulder and the Denver Conference Rooms 6 th Floor 1800 Grant St. Denver I. Video Conference Hardware and Components The what, where, and functionality
VERVE 2 First Time User Guide
 VERVE 2 First Time User Guide The VERVE2 is THREE awesome products in one. First, it is a sensor system that you can use to easily control your favorite games or apps with the world around you. Second,
VERVE 2 First Time User Guide The VERVE2 is THREE awesome products in one. First, it is a sensor system that you can use to easily control your favorite games or apps with the world around you. Second,
How to Build a Simple Pac-Man Game
 How to Build a Simple Pac-Man Game For today's program, we are going to build a simple Pac-Man game. Pac-Man was one of the very first arcade games developed around 1980. For our version of Pac-Man we
How to Build a Simple Pac-Man Game For today's program, we are going to build a simple Pac-Man game. Pac-Man was one of the very first arcade games developed around 1980. For our version of Pac-Man we
THE TOP TEN TIPS FOR USING QUALTRICS AT BYU
 THE TOP TEN TIPS FOR USING QUALTRICS AT BYU TIP #1: CREATING A SURVEY FROM A COPY AND COLLABORATING ON SURVEYS TIP #2: CREATING AND USING PANELS TIP #3: LIBRARIES AND HOW TO USE THEM TIP #4: BASIC SKIP
THE TOP TEN TIPS FOR USING QUALTRICS AT BYU TIP #1: CREATING A SURVEY FROM A COPY AND COLLABORATING ON SURVEYS TIP #2: CREATING AND USING PANELS TIP #3: LIBRARIES AND HOW TO USE THEM TIP #4: BASIC SKIP
product. Please read this instruction before setup your VenomXTM.
 Tuact Corp. Ltd. TM Venom X mouse controller combo Setup Software Instruction Thank you for purchasing our VenomXTM product. Please read this instruction before setup your VenomXTM. Introduction Venom
Tuact Corp. Ltd. TM Venom X mouse controller combo Setup Software Instruction Thank you for purchasing our VenomXTM product. Please read this instruction before setup your VenomXTM. Introduction Venom
FUNDAMENTALS OF ROBOTICS
 FUNDAMENTALS OF ROBOTICS Lab exercise Stäubli AULINAS Josep (u1043469) GARCIA Frederic (u1038431) Introduction The aim of this tutorial is to give a brief overview on the Stäubli Robot System describing
FUNDAMENTALS OF ROBOTICS Lab exercise Stäubli AULINAS Josep (u1043469) GARCIA Frederic (u1038431) Introduction The aim of this tutorial is to give a brief overview on the Stäubli Robot System describing
REFERRED LEAD GENERATOR
 REFERRED LEAD GENERATOR Provided By REFERRED LEAD GENERATOR Referred leads are the lifeblood of any producer. Many sales consultants support the idea of feeding referred leads to your prospective referrers.
REFERRED LEAD GENERATOR Provided By REFERRED LEAD GENERATOR Referred leads are the lifeblood of any producer. Many sales consultants support the idea of feeding referred leads to your prospective referrers.
Tips and Techniques on the PR-620
 Techniques and Tips on the PR-620 Learn how to demonstrate the PR-620 and make it look as easy as it really is. Topics to be covered will be: basic operation, machine threading, screen icons, merging patterns,
Techniques and Tips on the PR-620 Learn how to demonstrate the PR-620 and make it look as easy as it really is. Topics to be covered will be: basic operation, machine threading, screen icons, merging patterns,
Lync 2013 - Online Meeting & Conference Call Guide
 Lync 2013 - Online Meeting & Conference Call Guide Alteva Hosted Lync Version:00 QUICK LINKS Schedule an Online Meeting Change Meeting Access and Presenter Options Join from a Computer with Lync Installed
Lync 2013 - Online Meeting & Conference Call Guide Alteva Hosted Lync Version:00 QUICK LINKS Schedule an Online Meeting Change Meeting Access and Presenter Options Join from a Computer with Lync Installed
How to Create Custom Sound Effects for NXT Robots.
 Talk to the Animals How to Create Custom Sound Effects for NXT Robots. NOTE: Note to parents and teachers: This process requires downloading software from the Internet and may require adult supervision.
Talk to the Animals How to Create Custom Sound Effects for NXT Robots. NOTE: Note to parents and teachers: This process requires downloading software from the Internet and may require adult supervision.
wpml manual A guide for site owners and translators.
 wpml manual A guide for site owners and translators. Contents WPML for Site Owners To Set Up a Translator Create a WordPress User Create a Translator To Set up from the Translation Management Settings
wpml manual A guide for site owners and translators. Contents WPML for Site Owners To Set Up a Translator Create a WordPress User Create a Translator To Set up from the Translation Management Settings
TNC is an open architecture for network access control. If you re not sure what NAC is, we ll cover that in a second. For now, the main point here is
 1 2 This slide shows the areas where TCG is developing standards. Each image corresponds to a TCG work group. In order to understand Trusted Network Connect, it s best to look at it in context with the
1 2 This slide shows the areas where TCG is developing standards. Each image corresponds to a TCG work group. In order to understand Trusted Network Connect, it s best to look at it in context with the
SPREAD BETTING MODULE 3 RISK MANAGEMENT 1 MODULE. Spread betting. Risk Management
 RISK MANAGEMENT 1 MODULE 3 Spread betting Risk Management RISK MANAGEMENT 2 How to use this module Navigation There are two navigation systems in this PDF. You can move forwards and backwards using the
RISK MANAGEMENT 1 MODULE 3 Spread betting Risk Management RISK MANAGEMENT 2 How to use this module Navigation There are two navigation systems in this PDF. You can move forwards and backwards using the
Would You Like To Earn $1000 s With The Click Of A Button?
 Would You Like To Earn $1000 s With The Click Of A Button? (Follow these easy step by step instructions and you will) This Version of the ebook is for all countries other than the USA. If you need the
Would You Like To Earn $1000 s With The Click Of A Button? (Follow these easy step by step instructions and you will) This Version of the ebook is for all countries other than the USA. If you need the
HD DVR Quick Start Guide
 HD DV Quick Start Guide Thanks for buying a Moxi HD DV. We know you want to see it in action, so let s get started. What you need for setup: Moxi HD DV Multi-Stream CableCAD * Digital Cable Subscription
HD DV Quick Start Guide Thanks for buying a Moxi HD DV. We know you want to see it in action, so let s get started. What you need for setup: Moxi HD DV Multi-Stream CableCAD * Digital Cable Subscription