Review A: Vector Analysis
|
|
|
- Earl Johnston
- 9 years ago
- Views:
Transcription
1 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Physics 8.02 Review A: Vector Analysis A... A-0 A.1 Vectors A-2 A.1.1 Introduction A-2 A.1.2 Properties of a Vector A-2 A.1.3 Application of Vectors A-6 A.2 Dot Product A-10 A.2.1 Introduction A-10 A.2.2 Definition A-11 A.2.3 Properties of Dot Product A-12 A.2.4 Vector Decomposition and the Dot Product A-12 A.3 Cross Product A-14 A.3.1 Definition: Cross Product A-14 A.3.2 Right-hand Rule for the Direction of Cross Product A-15 A.3.3 Properties of the Cross Product A-16 A.3.4 Vector Decomposition and the Cross Product A-17 A-1

2 Vector Analysis A.1 Vectors A.1.1 Introduction Certain physical quantities such as mass or the absolute temperature at some point only have magnitude. These quantities can be represented by numbers alone, with the appropriate units, and they are called scalars. There are, however, other physical quantities which have both magnitude and direction; the magnitude can stretch or shrink, and the direction can reverse. These quantities can be added in such a way that takes into account both direction and magnitude. Force is an eample of a quantity that acts in a certain direction with some magnitude that we measure in newtons. When two forces act on an object, the sum of the forces depends on both the direction and magnitude of the two forces. Position, displacement, velocity, acceleration, force, momentum and torque are all physical quantities that can be represented mathematically by vectors. We shall begin by defining precisely what we mean by a vector. A.1.2 Properties of a Vector A vector is a quantity that has both direction and magnitude. Let a vector be denoted by the symbol A. The magnitude of A is A A. We can represent vectors as geometric objects using arrows. The length of the arrow corresponds to the magnitude of the vector. The arrow points in the direction of the vector (Figure A.1.1). Figure A.1.1 Vectors as arrows. There are two defining operations for vectors: (1) Vector Addition: Vectors can be added. Let A and B be two vectors. We define a new vector, C= A+ B, the vector addition of A and B, by a geometric construction. Draw the arrow that represents A. Place the A-2

3 tail of the arrow that represents B at the tip of the arrow for A as shown in Figure A.1.2(a). The arrow that starts at the tail of A and goes to the tip of B is defined to be the vector addition C= A+ B. There is an equivalent construction for the law of vector addition. The vectors A and B can be drawn with their tails at the same point. The two vectors form the sides of a parallelogram. The diagonal of the parallelogram corresponds to the vector C= A+ B, as shown in Figure A.1.2(b). Figure A.1.2 Geometric sum of vectors. Vector addition satisfies the following four properties: (i) Commutivity: The order of adding vectors does not matter. A+ B = B+ A (A.1.1) Our geometric definition for vector addition satisfies the commutivity property (i) since in the parallelogram representation for the addition of vectors, it doesn t matter which side you start with as seen in Figure A.1.3. Figure A.1.3 Commutative property of vector addition (ii) Associativity: When adding three vectors, it doesn t matter which two you start with ( A+ B) + C= A+ ( B+ C) (A.1.2) In Figure A.1.4(a), we add ( A+ B) + C, while in Figure A.1.4(b) we add A+ ( B+ C). We arrive at the same vector sum in either case. A-3
. Figure A.1.2 Geometric sum of vectors.")
4 Figure A.1.4 Associative law. (iii) Identity Element for Vector Addition: There is a unique vector, 0, that acts as an identity element for vector addition. This means that for all vectors A, A+ 0= 0+ A= A (A.1.3) (iv) Inverse element for Vector Addition: For every vector A, there is a unique inverse vector such that ( 1) A A A+ A = 0 ( ) (A.1.4) This means that the vector A has the same magnitude as A, A = A = A, but they point in opposite directions (Figure A.1.5). Figure A.1.5 additive inverse. (2) Scalar Multiplication of Vectors: Vectors can be multiplied by real numbers. A-4
 (iv) Inverse element for Vector Addition: For every vector A, there is a unique inverse vector such that ( 1)")
5 Let A be a vector. Let c be a real positive number. Then the multiplication of A by c is a new vector which we denote by the symbol ca. The magnitude of ca is c times the magnitude of A (Figure A.1.6a), ca = Ac (A.1.5) Since c > 0, the direction of ca is the same as the direction of A. However, the direction of ca is opposite of A (Figure A.1.6b). Figure A.1.6 Multiplication of vector A by (a) c > 0, and (b) c < 0. Scalar multiplication of vectors satisfies the following properties: (i) Associative Law for Scalar Multiplication: The order of multiplying numbers is doesn t matter. Let b and c be real numbers. Then bc ( A) = ( bc) A = ( cba) = cb ( A) (A.1.6) (ii) Distributive Law for Vector Addition: Vector addition satisfies a distributive law for multiplication by a number. Let c be a real number. Then c( A+ B) = ca+ cb (A.1.7) Figure A.1.7 illustrates this property. A-5
 = ( bc) A = ( cba) = cb ( A) (A.1.6) (ii) Distributive Law for Vector Addition: Vector addition satisfies a distributive law for multiplication by a number. Let c be a real number.")
6 Figure A.1.7 Distributive Law for vector addition. (iii) Distributive Law for Scalar Addition: The multiplication operation also satisfies a distributive law for the addition of numbers. Let b and c be real numbers. Then ( b+ c) A = ba+ ca (A.1.8) Our geometric definition of vector addition satisfies this condition as seen in Figure A.1.8. Figure A.1.8 Distributive law for scalar multiplication (iv) Identity Element for Scalar Multiplication: The number 1 acts as an identity element for multiplication, A.1.3 Application of Vectors 1 A = A (A.1.9) When we apply vectors to physical quantities it s nice to keep in the back of our minds all these formal properties. However from the physicist s point of view, we are interested in representing physical quantities such as displacement, velocity, acceleration, force, impulse, momentum, torque, and angular momentum as vectors. We can t add force to velocity or subtract momentum from torque. We must always understand the physical contet for the vector quantity. Thus, instead of approaching vectors as formal A-6
 Identity Element for Scalar Multiplication: The number 1 acts as an identity element for multiplication, A.1.3 Application of Vectors 1 A = A (A.")
7 mathematical objects we shall instead consider the following essential properties that enable us to represent physical quantities as vectors. (1) Vectors can eist at any point P in space. (2) Vectors have direction and magnitude. (3) Vector Equality: Any two vectors that have the same direction and magnitude are equal no matter where in space they are located. (4) Vector Decomposition: Choose a coordinate system with an origin and aes. We can decompose a vector into component vectors along each coordinate ais. In Figure A.1.9 we choose Cartesian coordinates for the y - plane (we ignore the z -direction for simplicity but we can etend our results when we need to). A vector A at P can be decomposed into the vector sum, A= A + A y (A.1.10) where A is the -component vector pointing in the positive or negative -direction, and A is the y -component vector pointing in the positive or negative y -direction y (Figure A.1.9). Figure A.1.9 Vector decomposition (5) Unit vectors: The idea of multiplication by real numbers allows us to define a set of unit vectors at each point in space. We associate to each point P in space, a set of three unit vectors ( ˆˆ ijk,, ˆ ). A unit vector means that the magnitude is one: ˆi = 1, ˆ j = 1, and kˆ = 1. We assign the direction of ˆ i to point in the direction of the increasing - coordinate at the point P. We call ˆ i the unit vector at P pointing in the + -direction. Unit vectors ˆ j and ˆk can be defined in a similar manner (Figure A.1.10). A-7
.")
8 Figure A.1.10 Choice of unit vectors in Cartesian coordinates. (6) Vector Components: Once we have defined unit vectors, we can then define the - component and y -component of a vector. Recall our vector decomposition, A= A + A. We can write the -component vector, A, as y A = Aˆ i (A.1.11) In this epression the term A, (without the arrow above) is called the -component of the vector A. The -component A can be positive, zero, or negative. It is not the magnitude of A 2 1/2 which is given by ( A ). Note the difference between the - component, A, and the -component vector, A. In a similar fashion we define the y -component, A y, and the z -component, A z, of the vector A A vector write the vector as A ˆ A = j, A = Akˆ y y z z (A.1.12) A can be represented by its three components A = ( A,A,A). We can also A= Aˆi+ Aˆj + Akˆ y z y z (A.1.13) (7) Magnitude: In Figure A.1.10, we also show the vector components A = ( A,A,A). Using the Pythagorean theorem, the magnitude of the A is, y z A= A + A + A 2 z (A.1.14) 2 2 y (8) Direction: Let s consider a vector A = ( A,A, y 0). Since the z -component is zero, the vector A lies in the -y plane. Let θ denote the angle that the vector A makes in the A-8
. Note the difference between the - component, A, and the -component vector, A.")
9 counterclockwise direction with the positive -ais (Figure A.1.12). Then the - component and y -components are A = A cosθ, A = Asinθ (A.1.15) y Figure A.1.12 Components of a vector in the -y plane. We can now write a vector in the y - plane as A = Acosθ ˆi+ Asinθ ˆj (A.1.16) Once the components of a vector are known, the tangent of the angle θ can be determined by A A y Asinθ = = tanθ (A.1.17) Acosθ which yields A 1 y θ = tan (A.1.18) A Clearly, the direction of the vector depends on the sign of A and A y. For eample, if both A > 0 and A > 0, then 0 < θ < π /2, and the vector lies in the first quadrant. If, y however, A > 0 and A < 0, then π /2< θ < 0, and the vector lies in the fourth quadrant. y (9) Vector Addition: Let A and B be two vectors in the -y plane. Let θ A andθ B denote the angles that the vectors A and B make (in the counterclockwise direction) with the positive -ais. Then A-9
 Vector Addition: Let A and B be two vectors in the -y plane.")
10 A= Acosθ ˆi+ Asinθ ˆj A B= BcosθBˆ i+ BsinθBˆ j A (A.1.19) (A.1.20) In Figure A.1.13, the vector addition C= A+ B is shown. LetθC denote the angle that the vector C makes with the positive -ais. Then the components of C are Figure A.1.13 Vector addition with components C = A + B, Cy = Ay + B y (A.1.21) In terms of magnitudes and angles, we have We can write the vector C as C = Ccosθ = Acosθ + Bcosθ C A C = Csinθ = Asinθ + Bsinθ y C A C= ( A + B ) ˆi+ ( A + B ) ˆj = C(cosθ ˆi + sinθ )ˆ j y y C C B B (A.1.22) (A.1.23) A.2 Dot Product A.2.1 Introduction We shall now introduce a new vector operation, called the dot product or scalar product that takes any two vectors and generates a scalar quantity (a number). We shall see that the physical concept of work can be mathematically described by the dot product between the force and the displacement vectors. A-10
 ˆi+ ( A + B ) ˆj = C(cosθ ˆi + sinθ )ˆ j y y C C B B (A.1.22")
11 Let A and B be two vectors. Since any two non-collinear vectors form a plane, we define the angle θ to be the angle between the vectors A and B as shown in Figure A.2.1. Note that θ can vary from 0 toπ. A.2.2 Definition Figure A.2.1 Dot product geometry. The dot product A B of the vectors A and B is defined to be product of the magnitude of the vectors A and B with the cosine of the angle θ between the two vectors: AB = AB cosθ (A.2.1) Where A = A and B = B represent the magnitude of A and B respectively. The dot product can be positive, zero, or negative, depending on the value of cosθ. The dot product is always a scalar quantity. We can give a geometric interpretation to the dot product by writing the definition as A B = ( Acos θ ) B (A.2.2) In this formulation, the term Acosθ is the projection of the vector A in the direction of the vector B. This projection is shown in Figure A.2.2a. So the dot product is the product of the projection of the length of A in the direction of B with the length of B. Note that we could also write the dot product as A B = AB ( cos θ ) (A.2.3) Now the term B cosθ is the projection of the vector B in the direction of the vector A as shown in Figure A.2.2b.From this perspective, the dot product is the product of the projection of the length of B in the direction of A with the length of A. A-11
 Where A = A and B = B represent the magnitude of A and B respectively. The dot product can be positive, zero, or negative, depending on the value of cosθ.")
12 Figure A.2.2a and A.2.2b Projection of vectors and the dot product. From our definition of the dot product we see that the dot product of two vectors that are perpendicular to each other is zero since the angle between the vectors is π /2 and cos( π / 2) = 0. A.2.3 Properties of Dot Product The first property involves the dot product between a vector ca where c is a scalar and a vector B, (1a) ca B = c ( A B) (A.2.4) The second involves the dot product between the sum of two vectors vectorc, (2a) ( A+ B) C= A C+ B C A and B with a (A.2.5) Since the dot product is a commutative operation A B = B A the similar definitions hold (1b) A cb = c ( A B) (2b) C ( A+ B) = C A+ C B (A.2.6) (A.2.7) (A.2.8) A.2.4 Vector Decomposition and the Dot Product With these properties in mind we can now develop an algebraic epression for the dot product in terms of components. Let s choose a Cartesian coordinate system with the A-12
 Since the dot product is a commutative operation A B = B A the similar definitions hold (1b) A cb = c ( A B) (2b) C ( A+ B) = C A+ C B (A.2.6) (A.2.7) (A.2.8) A.2.4 Vector Decomposition and the Dot Product With these properties in mind we can now develop an algebraic epression for the dot product in terms of components.")
13 vector B pointing along the positive -ais with positive -component B, i.e., B= B ˆi. The vector A can be written as A= Aˆi+ A ˆj + Akˆ y z We first calculate that the dot product of the unit vector ˆ i with itself is unity: (A.2.9) ˆˆ i i = ˆi ˆi cos(0) = 1 (A.2.10) since the unit vector has magnitude ˆi = 1 and cos(0) = 1. We note that the same rule applies for the unit vectors in the y and z directions: ˆj ˆj= kˆ k ˆ = 1 (A.2.11) The dot product of the unit vector ˆ i with the unit vectorˆ j is zero because the two unit vectors are perpendicular to each other: ˆˆ i j= ˆi ˆj cos( π /2) = 0 (A.2.12) Similarly, the dot product of the unit vector ˆ i with the unit vector ˆk, and the unit vector ĵ with the unit vector ˆk are also zero: ˆik ˆ = ˆjk ˆ = 0 (A.2.13) The dot product of the two vectors now becomes AB = ( Aˆi+ A ˆj+ Akˆ ) B ˆi y z = Aˆi B ˆi+ A ˆj B ˆi+ Akˆ B ˆi property (2a) y z = AB( ˆˆ i i) + AB( ˆˆ j i) + AB( kˆ ˆi) property (1a) and (1b) = AB y z (A.2.14) This third step is the crucial one because it shows that it is only the unit vectors that undergo the dot product operation. Since we assumed that the vector B points along the positive -ais with positive - component, our answer can be zero, positive, or negative depending on the - B component of the vector A. In Figure A.2.3, we show the three different cases. A-13

14 Figure A.2.3 Dot product that is (a) positive, (b) zero or (c) negative. The result for the dot product can be generalized easily for arbitrary vectors A= Aˆi+ Aˆj + Akˆ y z (A.2.15) and to yield A.3 Cross Product B= B ˆi+ B ˆj + B kˆ y z AB = AB + AB y y + AB z z (A.2.16) (A.2.17) We shall now introduce our second vector operation, called the cross product that takes any two vectors and generates a new vector. The cross product is a type of multiplication law that turns our vector space (law for addition of vectors) into a vector algebra (laws for addition and multiplication of vectors). The first application of the cross product will be the physical concept of torque about a point P which can be described mathematically by the cross product of a vector from P to where the force acts, and the force vector. A.3.1 Definition: Cross Product Let A and B be two vectors. Since any two vectors form a plane, we define the angle θ to be the angle between the vectors A and B as shown in Figure A The magnitude of the cross product A B of the vectors A and B is defined to be product of the magnitude of the vectors A and B with the sine of the angle θ between the two vectors, A B = ABsinθ (A.3.1) A-14
 into a vector algebra (laws for addition and multiplication of vectors).")
15 where A and B denote the magnitudes of A and B, respectively. The angleθ between the vectors is limited to the values 0 θ π insuring that sinθ 0. Figure A.3.1 Cross product geometry. The direction of the cross product is defined as follows. The vectors A and B form a plane. Consider the direction perpendicular to this plane. There are two possibilities, as shown in Figure A.3.1. We shall choose one of these two for the direction of the cross product A B using a convention that is commonly called the right-hand rule. A.3.2 Right-hand Rule for the Direction of Cross Product The first step is to redraw the vectors A and B so that their tails are touching. Then draw an arc starting from the vector A and finishing on the vector B. Curl your right fingers the same way as the arc. Your right thumb points in the direction of the cross product A B (Figure A.3.2). Figure A.3.2 Right-Hand Rule. You should remember that the direction of the cross product A B is perpendicular to the plane formed by A and B. We can give a geometric interpretation to the magnitude of the cross product by writing the definition as A-15

16 A B = A( B sinθ ) (A.3.2) The vectors A and B form a parallelogram. The area of the parallelogram equals the height times the base, which is the magnitude of the cross product. In Figure A.3.3, two different representations of the height and base of a parallelogram are illustrated. As depicted in Figure A.3.3(a), the term Bsinθ is the projection of the vector B in the direction perpendicular to the vector A. We could also write the magnitude of the cross product as A B = ( Asin θ ) B (A.3.3) Now the term Asinθ is the projection of the vector A in the direction perpendicular to the vector B as shown in Figure A.3.3(b). Figure A.3.3 Projection of vectors and the cross product The cross product of two vectors that are parallel (or anti-parallel) to each other is zero since the angle between the vectors is 0 (or π ) and sin(0) = 0 (or sin( π ) = 0). Geometrically, two parallel vectors do not have any component perpendicular to their common direction. A.3.3 Properties of the Cross Product (1) The cross product is anti-commutative since changing the order of the vectors cross product changes the direction of the cross product vector by the right hand rule: A B = B A (2) The cross product between a vector ca where c is a scalar and a vector B is ca B = c ( A B) (A.3.4) (A.3.5) Similarly, A cb= c ( A B) (A.3.6) A-16
 Now the term Asinθ is the projection of the vector A in the direction perpendicular to the vector B as shown in Figure A.3.3(b). Figure A.3.3 Projection of vectors and the cross product The cross")
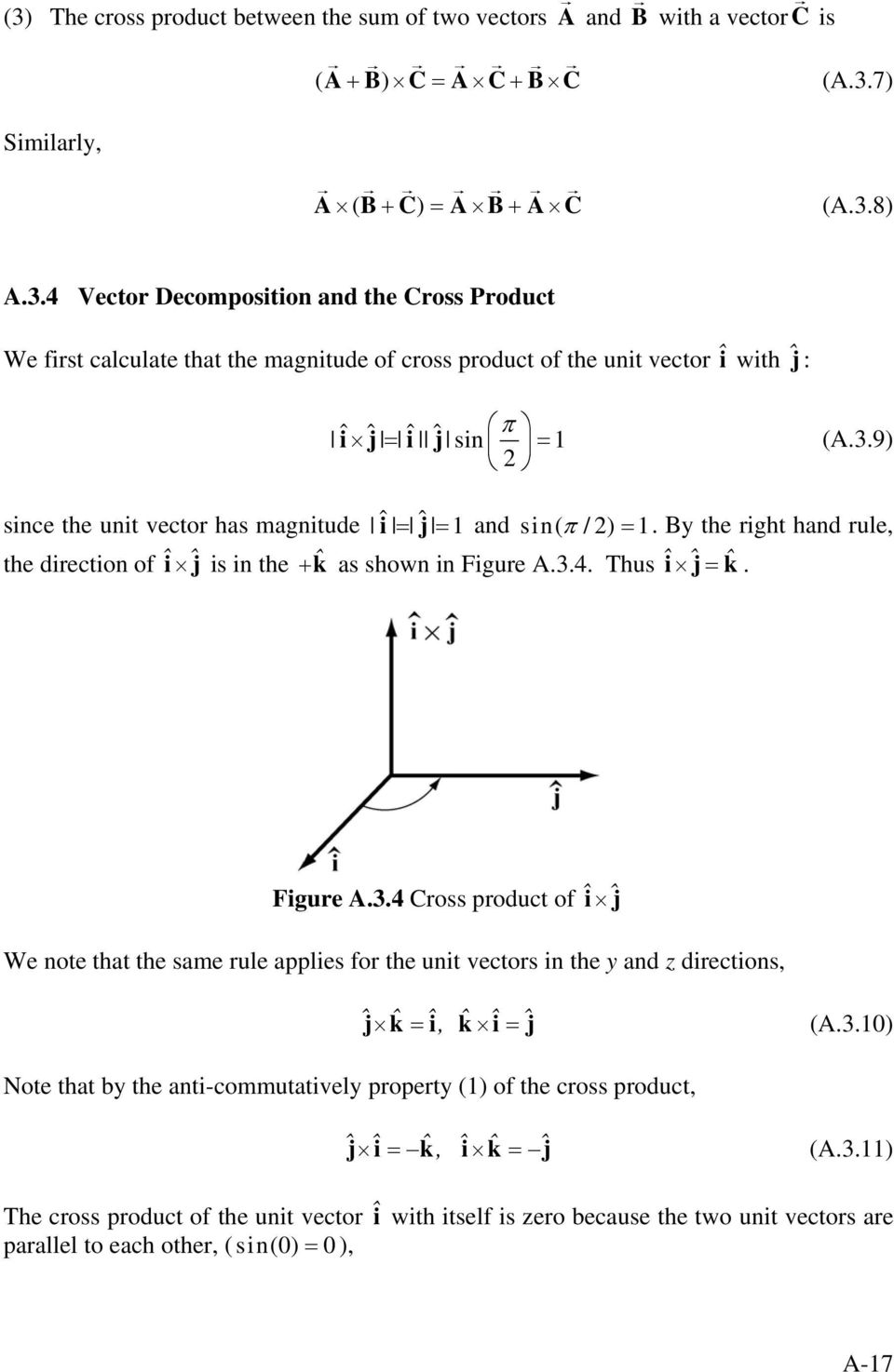
17 (3) The cross product between the sum of two vectors A and B with a vector C is ( A+ B) C= A C+ B C (A.3.7) Similarly, A ( B+ C) = A B+ A C (A.3.8) A.3.4 Vector Decomposition and the Cross Product We first calculate that the magnitude of cross product of the unit vector ˆ with ˆ i j : ˆ ˆ ˆ ˆ π i j = i j sin = 1 (A.3.9) 2 since the unit vector has magnitude ˆ i = ˆ j = 1 and sin( π /2) = 1. By the right hand rule, the direction of ˆ i ˆ j is in the +kˆ as shown in Figure A.3.4. Thus ˆ i ˆ j= k. ˆ Figure A.3.4 Cross product of ˆ i ˆ j We note that the same rule applies for the unit vectors in the y and z directions, ˆj kˆ = ˆi, kˆ ˆi = ˆj (A.3.10) Note that by the anti-commutatively property (1) of the cross product, ˆj ˆi = kˆ, ˆi kˆ = ˆj (A.3.11) The cross product of the unit vector ˆ i with itself is zero because the two unit vectors are parallel to each other, (sin( 0) = 0), A-17
18 ˆi ˆi = ˆi ˆi sin(0) = 0 (A.3.12) The cross product of the unit vector also zero for the same reason. ĵ with itself and the unit vector ˆk with itself, are ˆj ˆj = 0, kˆ k ˆ = 0 (A.3.13) With these properties in mind we can now develop an algebraic epression for the cross product in terms of components. Let s choose a Cartesian coordinate system with the vector B pointing along the positive -ais with positive -component B. Then the vectors A and B can be written as A= Aˆi+ Aˆj + Akˆ y z and B= B ˆ i (A.3.14) (A.3.15) respectively. The cross product in vector components is This becomes, using properties (3) and (2), A B= ( Aˆi+ Aˆj + Akˆ ) Bˆ i y z A B= ( Aˆi B ˆi ) + ( A ˆj B ˆi) + ( Akˆ B ˆi) y z = AB( ˆi ˆi) + AB( ˆj ˆi) + AB(ˆ k ˆi ) y z = ABkˆ + ABˆj y z (A.3.16) (A.3.17) The vector component epression for the cross product easily generalizes for arbitrary vectors A= Aˆi+ Aˆj + Akˆ y z (A.3.18) and B= B ˆi+ B ˆj + B kˆ y z (A.3.19) to yield A B= ( AB AB) ˆi + ( AB AB) ˆj + ( AB AB) kˆ. (A.3.20) y z z y z z y y A-18
 and (2), A B= ( Aˆi+ Aˆj + Akˆ ) Bˆ i y z A B= ( Aˆi B ˆi ) + ( A ˆj B ˆi) + ( Akˆ B ˆi) y z = AB( ˆi ˆi) + AB( ˆj ˆi) +")
Figure 1.1 Vector A and Vector F
 CHAPTER I VECTOR QUANTITIES Quantities are anything which can be measured, and stated with number. Quantities in physics are divided into two types; scalar and vector quantities. Scalar quantities have
CHAPTER I VECTOR QUANTITIES Quantities are anything which can be measured, and stated with number. Quantities in physics are divided into two types; scalar and vector quantities. Scalar quantities have
A vector is a directed line segment used to represent a vector quantity.
 Chapters and 6 Introduction to Vectors A vector quantity has direction and magnitude. There are many examples of vector quantities in the natural world, such as force, velocity, and acceleration. A vector
Chapters and 6 Introduction to Vectors A vector quantity has direction and magnitude. There are many examples of vector quantities in the natural world, such as force, velocity, and acceleration. A vector
Lecture L3 - Vectors, Matrices and Coordinate Transformations
 S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
Unified Lecture # 4 Vectors
 Fall 2005 Unified Lecture # 4 Vectors These notes were written by J. Peraire as a review of vectors for Dynamics 16.07. They have been adapted for Unified Engineering by R. Radovitzky. References [1] Feynmann,
Fall 2005 Unified Lecture # 4 Vectors These notes were written by J. Peraire as a review of vectors for Dynamics 16.07. They have been adapted for Unified Engineering by R. Radovitzky. References [1] Feynmann,
VECTOR ALGEBRA. 10.1.1 A quantity that has magnitude as well as direction is called a vector. is given by a and is represented by a.
 VECTOR ALGEBRA Chapter 10 101 Overview 1011 A quantity that has magnitude as well as direction is called a vector 101 The unit vector in the direction of a a is given y a and is represented y a 101 Position
VECTOR ALGEBRA Chapter 10 101 Overview 1011 A quantity that has magnitude as well as direction is called a vector 101 The unit vector in the direction of a a is given y a and is represented y a 101 Position
v w is orthogonal to both v and w. the three vectors v, w and v w form a right-handed set of vectors.
 3. Cross product Definition 3.1. Let v and w be two vectors in R 3. The cross product of v and w, denoted v w, is the vector defined as follows: the length of v w is the area of the parallelogram with
3. Cross product Definition 3.1. Let v and w be two vectors in R 3. The cross product of v and w, denoted v w, is the vector defined as follows: the length of v w is the area of the parallelogram with
Chapter 3 Vectors. m = m1 + m2 = 3 kg + 4 kg = 7 kg (3.1)
") COROLLARY I. A body, acted on by two forces simultaneously, will describe the diagonal of a parallelogram in the same time as it would describe the sides by those forces separately. Isaac Newton - Principia
COROLLARY I. A body, acted on by two forces simultaneously, will describe the diagonal of a parallelogram in the same time as it would describe the sides by those forces separately. Isaac Newton - Principia
The Vector or Cross Product
 The Vector or ross Product 1 ppendix The Vector or ross Product We saw in ppendix that the dot product of two vectors is a scalar quantity that is a maximum when the two vectors are parallel and is zero
The Vector or ross Product 1 ppendix The Vector or ross Product We saw in ppendix that the dot product of two vectors is a scalar quantity that is a maximum when the two vectors are parallel and is zero
One advantage of this algebraic approach is that we can write down
 . Vectors and the dot product A vector v in R 3 is an arrow. It has a direction and a length (aka the magnitude), but the position is not important. Given a coordinate axis, where the x-axis points out
. Vectors and the dot product A vector v in R 3 is an arrow. It has a direction and a length (aka the magnitude), but the position is not important. Given a coordinate axis, where the x-axis points out
13 MATH FACTS 101. 2 a = 1. 7. The elements of a vector have a graphical interpretation, which is particularly easy to see in two or three dimensions.
 3 MATH FACTS 0 3 MATH FACTS 3. Vectors 3.. Definition We use the overhead arrow to denote a column vector, i.e., a linear segment with a direction. For example, in three-space, we write a vector in terms
3 MATH FACTS 0 3 MATH FACTS 3. Vectors 3.. Definition We use the overhead arrow to denote a column vector, i.e., a linear segment with a direction. For example, in three-space, we write a vector in terms
Vector Math Computer Graphics Scott D. Anderson
 Vector Math Computer Graphics Scott D. Anderson 1 Dot Product The notation v w means the dot product or scalar product or inner product of two vectors, v and w. In abstract mathematics, we can talk about
Vector Math Computer Graphics Scott D. Anderson 1 Dot Product The notation v w means the dot product or scalar product or inner product of two vectors, v and w. In abstract mathematics, we can talk about
AP Physics - Vector Algrebra Tutorial
 AP Physics - Vector Algrebra Tutorial Thomas Jefferson High School for Science and Technology AP Physics Team Summer 2013 1 CONTENTS CONTENTS Contents 1 Scalars and Vectors 3 2 Rectangular and Polar Form
AP Physics - Vector Algrebra Tutorial Thomas Jefferson High School for Science and Technology AP Physics Team Summer 2013 1 CONTENTS CONTENTS Contents 1 Scalars and Vectors 3 2 Rectangular and Polar Form
Section 9.1 Vectors in Two Dimensions
 Section 9.1 Vectors in Two Dimensions Geometric Description of Vectors A vector in the plane is a line segment with an assigned direction. We sketch a vector as shown in the first Figure below with an
Section 9.1 Vectors in Two Dimensions Geometric Description of Vectors A vector in the plane is a line segment with an assigned direction. We sketch a vector as shown in the first Figure below with an
Chapter 6 Circular Motion
 Chapter 6 Circular Motion 6.1 Introduction... 1 6.2 Cylindrical Coordinate System... 2 6.2.1 Unit Vectors... 3 6.2.2 Infinitesimal Line, Area, and Volume Elements in Cylindrical Coordinates... 4 Example
Chapter 6 Circular Motion 6.1 Introduction... 1 6.2 Cylindrical Coordinate System... 2 6.2.1 Unit Vectors... 3 6.2.2 Infinitesimal Line, Area, and Volume Elements in Cylindrical Coordinates... 4 Example
Section V.3: Dot Product
 Section V.3: Dot Product Introduction So far we have looked at operations on a single vector. There are a number of ways to combine two vectors. Vector addition and subtraction will not be covered here,
Section V.3: Dot Product Introduction So far we have looked at operations on a single vector. There are a number of ways to combine two vectors. Vector addition and subtraction will not be covered here,
Vector has a magnitude and a direction. Scalar has a magnitude
 Vector has a magnitude and a direction Scalar has a magnitude Vector has a magnitude and a direction Scalar has a magnitude a brick on a table Vector has a magnitude and a direction Scalar has a magnitude
Vector has a magnitude and a direction Scalar has a magnitude Vector has a magnitude and a direction Scalar has a magnitude a brick on a table Vector has a magnitude and a direction Scalar has a magnitude
PHYSICS 151 Notes for Online Lecture #6
 PHYSICS 151 Notes for Online Lecture #6 Vectors - A vector is basically an arrow. The length of the arrow represents the magnitude (value) and the arrow points in the direction. Many different quantities
PHYSICS 151 Notes for Online Lecture #6 Vectors - A vector is basically an arrow. The length of the arrow represents the magnitude (value) and the arrow points in the direction. Many different quantities
MAT 1341: REVIEW II SANGHOON BAEK
 MAT 1341: REVIEW II SANGHOON BAEK 1. Projections and Cross Product 1.1. Projections. Definition 1.1. Given a vector u, the rectangular (or perpendicular or orthogonal) components are two vectors u 1 and
MAT 1341: REVIEW II SANGHOON BAEK 1. Projections and Cross Product 1.1. Projections. Definition 1.1. Given a vector u, the rectangular (or perpendicular or orthogonal) components are two vectors u 1 and
28 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE. v x. u y v z u z v y u y u z. v y v z
 28 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE 1.4 Cross Product 1.4.1 Definitions The cross product is the second multiplication operation between vectors we will study. The goal behind the definition
28 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE 1.4 Cross Product 1.4.1 Definitions The cross product is the second multiplication operation between vectors we will study. The goal behind the definition
Vector Algebra II: Scalar and Vector Products
 Chapter 2 Vector Algebra II: Scalar and Vector Products We saw in the previous chapter how vector quantities may be added and subtracted. In this chapter we consider the products of vectors and define
Chapter 2 Vector Algebra II: Scalar and Vector Products We saw in the previous chapter how vector quantities may be added and subtracted. In this chapter we consider the products of vectors and define
13.4 THE CROSS PRODUCT
 710 Chapter Thirteen A FUNDAMENTAL TOOL: VECTORS 62. Use the following steps and the results of Problems 59 60 to show (without trigonometry) that the geometric and algebraic definitions of the dot product
710 Chapter Thirteen A FUNDAMENTAL TOOL: VECTORS 62. Use the following steps and the results of Problems 59 60 to show (without trigonometry) that the geometric and algebraic definitions of the dot product
Vectors and Scalars. AP Physics B
 Vectors and Scalars P Physics Scalar SCLR is NY quantity in physics that has MGNITUDE, but NOT a direction associated with it. Magnitude numerical value with units. Scalar Example Speed Distance ge Magnitude
Vectors and Scalars P Physics Scalar SCLR is NY quantity in physics that has MGNITUDE, but NOT a direction associated with it. Magnitude numerical value with units. Scalar Example Speed Distance ge Magnitude
Review B: Coordinate Systems
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of hysics 8.02 Review B: Coordinate Systems B.1 Cartesian Coordinates... B-2 B.1.1 Infinitesimal Line Element... B-4 B.1.2 Infinitesimal Area Element...
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of hysics 8.02 Review B: Coordinate Systems B.1 Cartesian Coordinates... B-2 B.1.1 Infinitesimal Line Element... B-4 B.1.2 Infinitesimal Area Element...
6. Vectors. 1 2009-2016 Scott Surgent ([email protected])
") 6. Vectors For purposes of applications in calculus and physics, a vector has both a direction and a magnitude (length), and is usually represented as an arrow. The start of the arrow is the vector s foot,
6. Vectors For purposes of applications in calculus and physics, a vector has both a direction and a magnitude (length), and is usually represented as an arrow. The start of the arrow is the vector s foot,
Vectors Math 122 Calculus III D Joyce, Fall 2012
 Vectors Math 122 Calculus III D Joyce, Fall 2012 Vectors in the plane R 2. A vector v can be interpreted as an arro in the plane R 2 ith a certain length and a certain direction. The same vector can be
Vectors Math 122 Calculus III D Joyce, Fall 2012 Vectors in the plane R 2. A vector v can be interpreted as an arro in the plane R 2 ith a certain length and a certain direction. The same vector can be
Section 1.1. Introduction to R n
 The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
1.3. DOT PRODUCT 19. 6. If θ is the angle (between 0 and π) between two non-zero vectors u and v,
 between two non-zero vectors u and v,") 1.3. DOT PRODUCT 19 1.3 Dot Product 1.3.1 Definitions and Properties The dot product is the first way to multiply two vectors. The definition we will give below may appear arbitrary. But it is not. It
1.3. DOT PRODUCT 19 1.3 Dot Product 1.3.1 Definitions and Properties The dot product is the first way to multiply two vectors. The definition we will give below may appear arbitrary. But it is not. It
v 1 v 3 u v = (( 1)4 (3)2, [1(4) ( 2)2], 1(3) ( 2)( 1)) = ( 10, 8, 1) (d) u (v w) = (u w)v (u v)w (Relationship between dot and cross product)
![v 1 v 3 u v = (( 1)4 (3)2, [1(4) ( 2)2], 1(3) ( 2)( 1)) = ( 10, 8, 1) (d) u (v w) = (u w)v (u v)w (Relationship between dot and cross product)](/thumbs/40/20880945.jpg "v 1 v 3 u v = (( 1)4 (3)2, [1(4) ( 2)2], 1(3) ( 2)( 1)) = ( 10, 8, 1) (d) u (v w) = (u w)v (u v)w (Relationship between dot and cross product)") 0.1 Cross Product The dot product of two vectors is a scalar, a number in R. Next we will define the cross product of two vectors in 3-space. This time the outcome will be a vector in 3-space. Definition
0.1 Cross Product The dot product of two vectors is a scalar, a number in R. Next we will define the cross product of two vectors in 3-space. This time the outcome will be a vector in 3-space. Definition
The Force Table Introduction: Theory:
 1 The Force Table Introduction: "The Force Table" is a simple tool for demonstrating Newton s First Law and the vector nature of forces. This tool is based on the principle of equilibrium. An object is
1 The Force Table Introduction: "The Force Table" is a simple tool for demonstrating Newton s First Law and the vector nature of forces. This tool is based on the principle of equilibrium. An object is
Chapter 18 Static Equilibrium
 Chapter 8 Static Equilibrium 8. Introduction Static Equilibrium... 8. Lever Law... Example 8. Lever Law... 4 8.3 Generalized Lever Law... 5 8.4 Worked Examples... 7 Example 8. Suspended Rod... 7 Example
Chapter 8 Static Equilibrium 8. Introduction Static Equilibrium... 8. Lever Law... Example 8. Lever Law... 4 8.3 Generalized Lever Law... 5 8.4 Worked Examples... 7 Example 8. Suspended Rod... 7 Example
Mathematics Notes for Class 12 chapter 10. Vector Algebra
 1 P a g e Mathematics Notes for Class 12 chapter 10. Vector Algebra A vector has direction and magnitude both but scalar has only magnitude. Magnitude of a vector a is denoted by a or a. It is non-negative
1 P a g e Mathematics Notes for Class 12 chapter 10. Vector Algebra A vector has direction and magnitude both but scalar has only magnitude. Magnitude of a vector a is denoted by a or a. It is non-negative
ex) What is the component form of the vector shown in the picture above?
 What is the component form of the vector shown in the picture above?") Vectors A ector is a directed line segment, which has both a magnitude (length) and direction. A ector can be created using any two points in the plane, the direction of the ector is usually denoted by
Vectors A ector is a directed line segment, which has both a magnitude (length) and direction. A ector can be created using any two points in the plane, the direction of the ector is usually denoted by
The Dot and Cross Products
 The Dot and Cross Products Two common operations involving vectors are the dot product and the cross product. Let two vectors =,, and =,, be given. The Dot Product The dot product of and is written and
The Dot and Cross Products Two common operations involving vectors are the dot product and the cross product. Let two vectors =,, and =,, be given. The Dot Product The dot product of and is written and
Dot product and vector projections (Sect. 12.3) There are two main ways to introduce the dot product
 There are two main ways to introduce the dot product") Dot product and vector projections (Sect. 12.3) Two definitions for the dot product. Geometric definition of dot product. Orthogonal vectors. Dot product and orthogonal projections. Properties of the dot
Dot product and vector projections (Sect. 12.3) Two definitions for the dot product. Geometric definition of dot product. Orthogonal vectors. Dot product and orthogonal projections. Properties of the dot
2 Session Two - Complex Numbers and Vectors
 PH2011 Physics 2A Maths Revision - Session 2: Complex Numbers and Vectors 1 2 Session Two - Complex Numbers and Vectors 2.1 What is a Complex Number? The material on complex numbers should be familiar
PH2011 Physics 2A Maths Revision - Session 2: Complex Numbers and Vectors 1 2 Session Two - Complex Numbers and Vectors 2.1 What is a Complex Number? The material on complex numbers should be familiar
Review of Vector Analysis in Cartesian Coordinates
 R. evicky, CBE 6333 Review of Vector Analysis in Cartesian Coordinates Scalar: A quantity that has magnitude, but no direction. Examples are mass, temperature, pressure, time, distance, and real numbers.
R. evicky, CBE 6333 Review of Vector Analysis in Cartesian Coordinates Scalar: A quantity that has magnitude, but no direction. Examples are mass, temperature, pressure, time, distance, and real numbers.
Math, Trigonometry and Vectors. Geometry. Trig Definitions. sin(θ) = opp hyp. cos(θ) = adj hyp. tan(θ) = opp adj. Here's a familiar image.
 = opp hyp. cos(θ) = adj hyp. tan(θ) = opp adj. Here's a familiar image.") Math, Trigonometr and Vectors Geometr Trig Definitions Here's a familiar image. To make predictive models of the phsical world, we'll need to make visualizations, which we can then turn into analtical
Math, Trigonometr and Vectors Geometr Trig Definitions Here's a familiar image. To make predictive models of the phsical world, we'll need to make visualizations, which we can then turn into analtical
Addition and Subtraction of Vectors
 ddition and Subtraction of Vectors 1 ppendi ddition and Subtraction of Vectors In this appendi the basic elements of vector algebra are eplored. Vectors are treated as geometric entities represented b
ddition and Subtraction of Vectors 1 ppendi ddition and Subtraction of Vectors In this appendi the basic elements of vector algebra are eplored. Vectors are treated as geometric entities represented b
Cross product and determinants (Sect. 12.4) Two main ways to introduce the cross product
 Two main ways to introduce the cross product") Cross product and determinants (Sect. 12.4) Two main ways to introduce the cross product Geometrical definition Properties Expression in components. Definition in components Properties Geometrical expression.
Cross product and determinants (Sect. 12.4) Two main ways to introduce the cross product Geometrical definition Properties Expression in components. Definition in components Properties Geometrical expression.
sin(θ) = opp hyp cos(θ) = adj hyp tan(θ) = opp adj
 = opp hyp cos(θ) = adj hyp tan(θ) = opp adj") Math, Trigonometr and Vectors Geometr 33º What is the angle equal to? a) α = 7 b) α = 57 c) α = 33 d) α = 90 e) α cannot be determined α Trig Definitions Here's a familiar image. To make predictive models
Math, Trigonometr and Vectors Geometr 33º What is the angle equal to? a) α = 7 b) α = 57 c) α = 33 d) α = 90 e) α cannot be determined α Trig Definitions Here's a familiar image. To make predictive models
Vector Algebra. Addition: (A + B) + C = A + (B + C) (associative) Subtraction: A B = A + (-B)
 + C = A + (B + C) (associative) Subtraction: A B = A + (-B)") Vector Algebra When dealing with scalars, the usual math operations (+, -, ) are sufficient to obtain any information needed. When dealing with ectors, the magnitudes can be operated on as scalars, but
Vector Algebra When dealing with scalars, the usual math operations (+, -, ) are sufficient to obtain any information needed. When dealing with ectors, the magnitudes can be operated on as scalars, but
Difference between a vector and a scalar quantity. N or 90 o. S or 270 o
 Vectors Vectors and Scalars Distinguish between vector and scalar quantities, and give examples of each. method. A vector is represented in print by a bold italicized symbol, for example, F. A vector has
Vectors Vectors and Scalars Distinguish between vector and scalar quantities, and give examples of each. method. A vector is represented in print by a bold italicized symbol, for example, F. A vector has
Physics 235 Chapter 1. Chapter 1 Matrices, Vectors, and Vector Calculus
 Chapter 1 Matrices, Vectors, and Vector Calculus In this chapter, we will focus on the mathematical tools required for the course. The main concepts that will be covered are: Coordinate transformations
Chapter 1 Matrices, Vectors, and Vector Calculus In this chapter, we will focus on the mathematical tools required for the course. The main concepts that will be covered are: Coordinate transformations
5.3 The Cross Product in R 3
 53 The Cross Product in R 3 Definition 531 Let u = [u 1, u 2, u 3 ] and v = [v 1, v 2, v 3 ] Then the vector given by [u 2 v 3 u 3 v 2, u 3 v 1 u 1 v 3, u 1 v 2 u 2 v 1 ] is called the cross product (or
53 The Cross Product in R 3 Definition 531 Let u = [u 1, u 2, u 3 ] and v = [v 1, v 2, v 3 ] Then the vector given by [u 2 v 3 u 3 v 2, u 3 v 1 u 1 v 3, u 1 v 2 u 2 v 1 ] is called the cross product (or
Problem set on Cross Product
 1 Calculate the vector product of a and b given that a= 2i + j + k and b = i j k (Ans 3 j - 3 k ) 2 Calculate the vector product of i - j and i + j (Ans ) 3 Find the unit vectors that are perpendicular
1 Calculate the vector product of a and b given that a= 2i + j + k and b = i j k (Ans 3 j - 3 k ) 2 Calculate the vector product of i - j and i + j (Ans ) 3 Find the unit vectors that are perpendicular
2. Spin Chemistry and the Vector Model
 2. Spin Chemistry and the Vector Model The story of magnetic resonance spectroscopy and intersystem crossing is essentially a choreography of the twisting motion which causes reorientation or rephasing
2. Spin Chemistry and the Vector Model The story of magnetic resonance spectroscopy and intersystem crossing is essentially a choreography of the twisting motion which causes reorientation or rephasing
Mechanics 1: Vectors
 Mechanics 1: Vectors roadly speaking, mechanical systems will be described by a combination of scalar and vector quantities. scalar is just a (real) number. For example, mass or weight is characterized
Mechanics 1: Vectors roadly speaking, mechanical systems will be described by a combination of scalar and vector quantities. scalar is just a (real) number. For example, mass or weight is characterized
Adding vectors We can do arithmetic with vectors. We ll start with vector addition and related operations. Suppose you have two vectors
 1 Chapter 13. VECTORS IN THREE DIMENSIONAL SPACE Let s begin with some names and notation for things: R is the set (collection) of real numbers. We write x R to mean that x is a real number. A real number
1 Chapter 13. VECTORS IN THREE DIMENSIONAL SPACE Let s begin with some names and notation for things: R is the set (collection) of real numbers. We write x R to mean that x is a real number. A real number
Trigonometric Functions and Triangles
 Trigonometric Functions and Triangles Dr. Philippe B. Laval Kennesaw STate University August 27, 2010 Abstract This handout defines the trigonometric function of angles and discusses the relationship between
Trigonometric Functions and Triangles Dr. Philippe B. Laval Kennesaw STate University August 27, 2010 Abstract This handout defines the trigonometric function of angles and discusses the relationship between
Example SECTION 13-1. X-AXIS - the horizontal number line. Y-AXIS - the vertical number line ORIGIN - the point where the x-axis and y-axis cross
 CHAPTER 13 SECTION 13-1 Geometry and Algebra The Distance Formula COORDINATE PLANE consists of two perpendicular number lines, dividing the plane into four regions called quadrants X-AXIS - the horizontal
CHAPTER 13 SECTION 13-1 Geometry and Algebra The Distance Formula COORDINATE PLANE consists of two perpendicular number lines, dividing the plane into four regions called quadrants X-AXIS - the horizontal
9.4. The Scalar Product. Introduction. Prerequisites. Learning Style. Learning Outcomes
 The Scalar Product 9.4 Introduction There are two kinds of multiplication involving vectors. The first is known as the scalar product or dot product. This is so-called because when the scalar product of
The Scalar Product 9.4 Introduction There are two kinds of multiplication involving vectors. The first is known as the scalar product or dot product. This is so-called because when the scalar product of
In order to describe motion you need to describe the following properties.
 Chapter 2 One Dimensional Kinematics How would you describe the following motion? Ex: random 1-D path speeding up and slowing down In order to describe motion you need to describe the following properties.
Chapter 2 One Dimensional Kinematics How would you describe the following motion? Ex: random 1-D path speeding up and slowing down In order to describe motion you need to describe the following properties.
Mechanics lecture 7 Moment of a force, torque, equilibrium of a body
 G.1 EE1.el3 (EEE1023): Electronics III Mechanics lecture 7 Moment of a force, torque, equilibrium of a body Dr Philip Jackson http://www.ee.surrey.ac.uk/teaching/courses/ee1.el3/ G.2 Moments, torque and
G.1 EE1.el3 (EEE1023): Electronics III Mechanics lecture 7 Moment of a force, torque, equilibrium of a body Dr Philip Jackson http://www.ee.surrey.ac.uk/teaching/courses/ee1.el3/ G.2 Moments, torque and
Section 10.4 Vectors
 Section 10.4 Vectors A vector is represented by using a ray, or arrow, that starts at an initial point and ends at a terminal point. Your textbook will always use a bold letter to indicate a vector (such
Section 10.4 Vectors A vector is represented by using a ray, or arrow, that starts at an initial point and ends at a terminal point. Your textbook will always use a bold letter to indicate a vector (such
Units, Physical Quantities, and Vectors
 Chapter 1 Units, Physical Quantities, and Vectors PowerPoint Lectures for University Physics, Thirteenth Edition Hugh D. Young and Roger A. Freedman Lectures by Wayne Anderson Goals for Chapter 1 To learn
Chapter 1 Units, Physical Quantities, and Vectors PowerPoint Lectures for University Physics, Thirteenth Edition Hugh D. Young and Roger A. Freedman Lectures by Wayne Anderson Goals for Chapter 1 To learn
9 Multiplication of Vectors: The Scalar or Dot Product
 Arkansas Tech University MATH 934: Calculus III Dr. Marcel B Finan 9 Multiplication of Vectors: The Scalar or Dot Product Up to this point we have defined what vectors are and discussed basic notation
Arkansas Tech University MATH 934: Calculus III Dr. Marcel B Finan 9 Multiplication of Vectors: The Scalar or Dot Product Up to this point we have defined what vectors are and discussed basic notation
Geometric description of the cross product of the vectors u and v. The cross product of two vectors is a vector! u x v is perpendicular to u and v
 12.4 Cross Product Geometric description of the cross product of the vectors u and v The cross product of two vectors is a vector! u x v is perpendicular to u and v The length of u x v is uv u v sin The
12.4 Cross Product Geometric description of the cross product of the vectors u and v The cross product of two vectors is a vector! u x v is perpendicular to u and v The length of u x v is uv u v sin The
Solving Simultaneous Equations and Matrices
 Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solutions to old Exam 1 problems
 Solutions to old Exam 1 problems Hi students! I am putting this old version of my review for the first midterm review, place and time to be announced. Check for updates on the web site as to which sections
Solutions to old Exam 1 problems Hi students! I am putting this old version of my review for the first midterm review, place and time to be announced. Check for updates on the web site as to which sections
Vector Spaces; the Space R n
 Vector Spaces; the Space R n Vector Spaces A vector space (over the real numbers) is a set V of mathematical entities, called vectors, U, V, W, etc, in which an addition operation + is defined and in which
Vector Spaces; the Space R n Vector Spaces A vector space (over the real numbers) is a set V of mathematical entities, called vectors, U, V, W, etc, in which an addition operation + is defined and in which
Vector Algebra CHAPTER 13. Ü13.1. Basic Concepts
 CHAPTER 13 ector Algebra Ü13.1. Basic Concepts A vector in the plane or in space is an arrow: it is determined by its length, denoted and its direction. Two arrows represent the same vector if they have
CHAPTER 13 ector Algebra Ü13.1. Basic Concepts A vector in the plane or in space is an arrow: it is determined by its length, denoted and its direction. Two arrows represent the same vector if they have
Chapter 4 One Dimensional Kinematics
 Chapter 4 One Dimensional Kinematics 41 Introduction 1 4 Position, Time Interval, Displacement 41 Position 4 Time Interval 43 Displacement 43 Velocity 3 431 Average Velocity 3 433 Instantaneous Velocity
Chapter 4 One Dimensional Kinematics 41 Introduction 1 4 Position, Time Interval, Displacement 41 Position 4 Time Interval 43 Displacement 43 Velocity 3 431 Average Velocity 3 433 Instantaneous Velocity
LINES AND PLANES IN R 3
 LINES AND PLANES IN R 3 In this handout we will summarize the properties of the dot product and cross product and use them to present arious descriptions of lines and planes in three dimensional space.
LINES AND PLANES IN R 3 In this handout we will summarize the properties of the dot product and cross product and use them to present arious descriptions of lines and planes in three dimensional space.
Math 241, Exam 1 Information.
 Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Linear Algebra: Vectors
 A Linear Algebra: Vectors A Appendix A: LINEAR ALGEBRA: VECTORS TABLE OF CONTENTS Page A Motivation A 3 A2 Vectors A 3 A2 Notational Conventions A 4 A22 Visualization A 5 A23 Special Vectors A 5 A3 Vector
A Linear Algebra: Vectors A Appendix A: LINEAR ALGEBRA: VECTORS TABLE OF CONTENTS Page A Motivation A 3 A2 Vectors A 3 A2 Notational Conventions A 4 A22 Visualization A 5 A23 Special Vectors A 5 A3 Vector
11.1. Objectives. Component Form of a Vector. Component Form of a Vector. Component Form of a Vector. Vectors and the Geometry of Space
 11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
Chapter 15 Collision Theory
 Chapter 15 Collision Theory 151 Introduction 1 15 Reference Frames Relative and Velocities 1 151 Center of Mass Reference Frame 15 Relative Velocities 3 153 Characterizing Collisions 5 154 One-Dimensional
Chapter 15 Collision Theory 151 Introduction 1 15 Reference Frames Relative and Velocities 1 151 Center of Mass Reference Frame 15 Relative Velocities 3 153 Characterizing Collisions 5 154 One-Dimensional
Vectors VECTOR PRODUCT. Graham S McDonald. A Tutorial Module for learning about the vector product of two vectors. Table of contents Begin Tutorial
 Vectors VECTOR PRODUCT Graham S McDonald A Tutorial Module for learning about the vector product of two vectors Table of contents Begin Tutorial c 2004 [email protected] 1. Theory 2. Exercises
Vectors VECTOR PRODUCT Graham S McDonald A Tutorial Module for learning about the vector product of two vectors Table of contents Begin Tutorial c 2004 [email protected] 1. Theory 2. Exercises
THREE DIMENSIONAL GEOMETRY
 Chapter 8 THREE DIMENSIONAL GEOMETRY 8.1 Introduction In this chapter we present a vector algebra approach to three dimensional geometry. The aim is to present standard properties of lines and planes,
Chapter 8 THREE DIMENSIONAL GEOMETRY 8.1 Introduction In this chapter we present a vector algebra approach to three dimensional geometry. The aim is to present standard properties of lines and planes,
3. KINEMATICS IN TWO DIMENSIONS; VECTORS.
 3. KINEMATICS IN TWO DIMENSIONS; VECTORS. Key words: Motion in Two Dimensions, Scalars, Vectors, Addition of Vectors by Graphical Methods, Tail to Tip Method, Parallelogram Method, Negative Vector, Vector
3. KINEMATICS IN TWO DIMENSIONS; VECTORS. Key words: Motion in Two Dimensions, Scalars, Vectors, Addition of Vectors by Graphical Methods, Tail to Tip Method, Parallelogram Method, Negative Vector, Vector
South Carolina College- and Career-Ready (SCCCR) Pre-Calculus
 Pre-Calculus") South Carolina College- and Career-Ready (SCCCR) Pre-Calculus Key Concepts Arithmetic with Polynomials and Rational Expressions PC.AAPR.2 PC.AAPR.3 PC.AAPR.4 PC.AAPR.5 PC.AAPR.6 PC.AAPR.7 Standards Know
South Carolina College- and Career-Ready (SCCCR) Pre-Calculus Key Concepts Arithmetic with Polynomials and Rational Expressions PC.AAPR.2 PC.AAPR.3 PC.AAPR.4 PC.AAPR.5 PC.AAPR.6 PC.AAPR.7 Standards Know
Linear algebra and the geometry of quadratic equations. Similarity transformations and orthogonal matrices
 MATH 30 Differential Equations Spring 006 Linear algebra and the geometry of quadratic equations Similarity transformations and orthogonal matrices First, some things to recall from linear algebra Two
MATH 30 Differential Equations Spring 006 Linear algebra and the geometry of quadratic equations Similarity transformations and orthogonal matrices First, some things to recall from linear algebra Two
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA MECHANICAL PRINCIPLES AND APPLICATIONS NQF LEVEL 3 OUTCOME 1 - LOADING SYSTEMS
 EDEXCEL NATIONAL CERTIFICATE/DIPLOMA MECHANICAL PRINCIPLES AND APPLICATIONS NQF LEVEL 3 OUTCOME 1 - LOADING SYSTEMS TUTORIAL 1 NON-CONCURRENT COPLANAR FORCE SYSTEMS 1. Be able to determine the effects
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA MECHANICAL PRINCIPLES AND APPLICATIONS NQF LEVEL 3 OUTCOME 1 - LOADING SYSTEMS TUTORIAL 1 NON-CONCURRENT COPLANAR FORCE SYSTEMS 1. Be able to determine the effects
December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B. KITCHENS
 December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B KITCHENS The equation 1 Lines in two-dimensional space (1) 2x y = 3 describes a line in two-dimensional space The coefficients of x and y in the equation
December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B KITCHENS The equation 1 Lines in two-dimensional space (1) 2x y = 3 describes a line in two-dimensional space The coefficients of x and y in the equation
Geometry of Vectors. 1 Cartesian Coordinates. Carlo Tomasi
 Geometry of Vectors Carlo Tomasi This note explores the geometric meaning of norm, inner product, orthogonality, and projection for vectors. For vectors in three-dimensional space, we also examine the
Geometry of Vectors Carlo Tomasi This note explores the geometric meaning of norm, inner product, orthogonality, and projection for vectors. For vectors in three-dimensional space, we also examine the
Connecting Transformational Geometry and Transformations of Functions
 Connecting Transformational Geometr and Transformations of Functions Introductor Statements and Assumptions Isometries are rigid transformations that preserve distance and angles and therefore shapes.
Connecting Transformational Geometr and Transformations of Functions Introductor Statements and Assumptions Isometries are rigid transformations that preserve distance and angles and therefore shapes.
The Matrix Elements of a 3 3 Orthogonal Matrix Revisited
 Physics 116A Winter 2011 The Matrix Elements of a 3 3 Orthogonal Matrix Revisited 1. Introduction In a class handout entitled, Three-Dimensional Proper and Improper Rotation Matrices, I provided a derivation
Physics 116A Winter 2011 The Matrix Elements of a 3 3 Orthogonal Matrix Revisited 1. Introduction In a class handout entitled, Three-Dimensional Proper and Improper Rotation Matrices, I provided a derivation
Introduction and Mathematical Concepts
 CHAPTER 1 Introduction and Mathematical Concepts PREVIEW In this chapter you will be introduced to the physical units most frequently encountered in physics. After completion of the chapter you will be
CHAPTER 1 Introduction and Mathematical Concepts PREVIEW In this chapter you will be introduced to the physical units most frequently encountered in physics. After completion of the chapter you will be
PYTHAGOREAN TRIPLES KEITH CONRAD
 PYTHAGOREAN TRIPLES KEITH CONRAD 1. Introduction A Pythagorean triple is a triple of positive integers (a, b, c) where a + b = c. Examples include (3, 4, 5), (5, 1, 13), and (8, 15, 17). Below is an ancient
PYTHAGOREAN TRIPLES KEITH CONRAD 1. Introduction A Pythagorean triple is a triple of positive integers (a, b, c) where a + b = c. Examples include (3, 4, 5), (5, 1, 13), and (8, 15, 17). Below is an ancient
Geometry Notes RIGHT TRIANGLE TRIGONOMETRY
 Right Triangle Trigonometry Page 1 of 15 RIGHT TRIANGLE TRIGONOMETRY Objectives: After completing this section, you should be able to do the following: Calculate the lengths of sides and angles of a right
Right Triangle Trigonometry Page 1 of 15 RIGHT TRIANGLE TRIGONOMETRY Objectives: After completing this section, you should be able to do the following: Calculate the lengths of sides and angles of a right
Trigonometry Review with the Unit Circle: All the trig. you ll ever need to know in Calculus
 Trigonometry Review with the Unit Circle: All the trig. you ll ever need to know in Calculus Objectives: This is your review of trigonometry: angles, six trig. functions, identities and formulas, graphs:
Trigonometry Review with the Unit Circle: All the trig. you ll ever need to know in Calculus Objectives: This is your review of trigonometry: angles, six trig. functions, identities and formulas, graphs:
ANALYTICAL METHODS FOR ENGINEERS
 UNIT 1: Unit code: QCF Level: 4 Credit value: 15 ANALYTICAL METHODS FOR ENGINEERS A/601/1401 OUTCOME - TRIGONOMETRIC METHODS TUTORIAL 1 SINUSOIDAL FUNCTION Be able to analyse and model engineering situations
UNIT 1: Unit code: QCF Level: 4 Credit value: 15 ANALYTICAL METHODS FOR ENGINEERS A/601/1401 OUTCOME - TRIGONOMETRIC METHODS TUTORIAL 1 SINUSOIDAL FUNCTION Be able to analyse and model engineering situations
Two vectors are equal if they have the same length and direction. They do not
 Vectors define vectors Some physical quantities, such as temperature, length, and mass, can be specified by a single number called a scalar. Other physical quantities, such as force and velocity, must
Vectors define vectors Some physical quantities, such as temperature, length, and mass, can be specified by a single number called a scalar. Other physical quantities, such as force and velocity, must
The Geometry of the Dot and Cross Products
 Journal of Online Mathematics and Its Applications Volume 6. June 2006. Article ID 1156 The Geometry of the Dot and Cross Products Tevian Dray Corinne A. Manogue 1 Introduction Most students first learn
Journal of Online Mathematics and Its Applications Volume 6. June 2006. Article ID 1156 The Geometry of the Dot and Cross Products Tevian Dray Corinne A. Manogue 1 Introduction Most students first learn
Vectors 2. The METRIC Project, Imperial College. Imperial College of Science Technology and Medicine, 1996.
 Vectors 2 The METRIC Project, Imperial College. Imperial College of Science Technology and Medicine, 1996. Launch Mathematica. Type
Vectors 2 The METRIC Project, Imperial College. Imperial College of Science Technology and Medicine, 1996. Launch Mathematica. Type
Exam 2 Practice Problems Part 2 Solutions
 Problem 1: Short Questions MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Physics 8. Exam Practice Problems Part Solutions (a) Can a constant magnetic field set into motion an electron, which is initially
Problem 1: Short Questions MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Physics 8. Exam Practice Problems Part Solutions (a) Can a constant magnetic field set into motion an electron, which is initially
Mechanics 1: Conservation of Energy and Momentum
 Mechanics : Conservation of Energy and Momentum If a certain quantity associated with a system does not change in time. We say that it is conserved, and the system possesses a conservation law. Conservation
Mechanics : Conservation of Energy and Momentum If a certain quantity associated with a system does not change in time. We say that it is conserved, and the system possesses a conservation law. Conservation
G. GRAPHING FUNCTIONS
 G. GRAPHING FUNCTIONS To get a quick insight int o how the graph of a function looks, it is very helpful to know how certain simple operations on the graph are related to the way the function epression
G. GRAPHING FUNCTIONS To get a quick insight int o how the graph of a function looks, it is very helpful to know how certain simple operations on the graph are related to the way the function epression
The Geometry of the Dot and Cross Products
 The Geometry of the Dot and Cross Products Tevian Dray Department of Mathematics Oregon State University Corvallis, OR 97331 [email protected] Corinne A. Manogue Department of Physics Oregon
The Geometry of the Dot and Cross Products Tevian Dray Department of Mathematics Oregon State University Corvallis, OR 97331 [email protected] Corinne A. Manogue Department of Physics Oregon
Work and Energy. Physics 1425 Lecture 12. Michael Fowler, UVa
 Work and Energy Physics 1425 Lecture 12 Michael Fowler, UVa What is Work and What Isn t? In physics, work has a very restricted meaning! Doing homework isn t work. Carrying somebody a mile on a level road
Work and Energy Physics 1425 Lecture 12 Michael Fowler, UVa What is Work and What Isn t? In physics, work has a very restricted meaning! Doing homework isn t work. Carrying somebody a mile on a level road
Section V.2: Magnitudes, Directions, and Components of Vectors
 Section V.: Magnitudes, Directions, and Components of Vectors Vectors in the plane If we graph a vector in the coordinate plane instead of just a grid, there are a few things to note. Firstl, directions
Section V.: Magnitudes, Directions, and Components of Vectors Vectors in the plane If we graph a vector in the coordinate plane instead of just a grid, there are a few things to note. Firstl, directions
Lab 2: Vector Analysis
 Lab 2: Vector Analysis Objectives: to practice using graphical and analytical methods to add vectors in two dimensions Equipment: Meter stick Ruler Protractor Force table Ring Pulleys with attachments
Lab 2: Vector Analysis Objectives: to practice using graphical and analytical methods to add vectors in two dimensions Equipment: Meter stick Ruler Protractor Force table Ring Pulleys with attachments
... ... . (2,4,5).. ...
.. ...") 12 Three Dimensions ½¾º½ Ì ÓÓÖ Ò Ø ËÝ Ø Ñ So far wehave been investigatingfunctions ofthe form y = f(x), withone independent and one dependent variable Such functions can be represented in two dimensions,
12 Three Dimensions ½¾º½ Ì ÓÓÖ Ò Ø ËÝ Ø Ñ So far wehave been investigatingfunctions ofthe form y = f(x), withone independent and one dependent variable Such functions can be represented in two dimensions,
2.2 Magic with complex exponentials
 2.2. MAGIC WITH COMPLEX EXPONENTIALS 97 2.2 Magic with complex exponentials We don t really know what aspects of complex variables you learned about in high school, so the goal here is to start more or
2.2. MAGIC WITH COMPLEX EXPONENTIALS 97 2.2 Magic with complex exponentials We don t really know what aspects of complex variables you learned about in high school, so the goal here is to start more or
Scalar : Vector : Equal vectors : Negative vectors : Proper vector : Null Vector (Zero Vector): Parallel vectors : Antiparallel vectors :
: Parallel vectors : Antiparallel vectors :") ELEMENTS OF VECTOS 1 Scalar : physical quantity having only magnitue but not associate with any irection is calle a scalar eg: time, mass, istance, spee, work, energy, power, pressure, temperature, electric
ELEMENTS OF VECTOS 1 Scalar : physical quantity having only magnitue but not associate with any irection is calle a scalar eg: time, mass, istance, spee, work, energy, power, pressure, temperature, electric
GCE Mathematics (6360) Further Pure unit 4 (MFP4) Textbook
 Further Pure unit 4 (MFP4) Textbook") Version 36 klm GCE Mathematics (636) Further Pure unit 4 (MFP4) Textbook The Assessment and Qualifications Alliance (AQA) is a company limited by guarantee registered in England and Wales 364473 and a
Version 36 klm GCE Mathematics (636) Further Pure unit 4 (MFP4) Textbook The Assessment and Qualifications Alliance (AQA) is a company limited by guarantee registered in England and Wales 364473 and a
Linear Algebra Notes for Marsden and Tromba Vector Calculus
 Linear Algebra Notes for Marsden and Tromba Vector Calculus n-dimensional Euclidean Space and Matrices Definition of n space As was learned in Math b, a point in Euclidean three space can be thought of
Linear Algebra Notes for Marsden and Tromba Vector Calculus n-dimensional Euclidean Space and Matrices Definition of n space As was learned in Math b, a point in Euclidean three space can be thought of
Problem Solving 5: Magnetic Force, Torque, and Magnetic Moments
 MASSACHUSETTS INSTITUTE OF TECHNOLOY Department of Physics Problem Solving 5: Magnetic Force, Torque, and Magnetic Moments OBJECTIVES 1. To start with the magnetic force on a moving charge q and derive
MASSACHUSETTS INSTITUTE OF TECHNOLOY Department of Physics Problem Solving 5: Magnetic Force, Torque, and Magnetic Moments OBJECTIVES 1. To start with the magnetic force on a moving charge q and derive
Cross Products and Moments of Force
 4 Cross Products and Moments of Force Ref: Hibbeler 4.2-4.3, edford & Fowler: Statics 2.6, 4.3 In geometric terms, the cross product of two vectors, A and, produces a new vector, C, with a direction perpendicular
4 Cross Products and Moments of Force Ref: Hibbeler 4.2-4.3, edford & Fowler: Statics 2.6, 4.3 In geometric terms, the cross product of two vectors, A and, produces a new vector, C, with a direction perpendicular