Run-Time Scheduling Support for Hybrid CPU/FPGA SoCs
|
|
|
- Dwayne Cole
- 8 years ago
- Views:
Transcription
1 Run-Time Scheduling Support for Hybrid CPU/FPGA SoCs Jason Agron

2 Acknowledgements I would like to thank Dr. Andrews, Dr. Alexander, and Dr. Sass for assistance and advice in both research and class work. Wes, Garrin, and Erik for help with tools and coding problems.

3 Publications Jason Agron, Wesley Peck, Erik Anderson, Ed Komp, Ron Sass, David Andrews, Run-Time Support for Hybrid CPU/FPGA Systems on Chip, Submitted to Transactions on Embedded Computing Systems, December Erik Anderson, Jason Agron, Wesley Peck, Jim Stevens, Fabrice Baijot, Ed Komp, Ron Sass, David Andrews, Enabling a Uniform Programming Model Across the Software/Hardware Boundary, In Proceedings of the Fourteenth Annual IEEE Symposium on Field-Programmable Custom Computing Machines (FCCM 2006), April David Andrews, Wesley Peck, Jason Agron, Erik Anderson, Jim Stevens, Fabrice Baijot, Presentation on the KU Hybrid Threads Project, MOCHA Design Conference, January 2006 D. Andrews, W. Peck, J. Agron, K. Preston, E. Komp, M. Finley, and R. Sass. hthreads: A Hardware/Software Co-Designed Multithreaded RTOS Kernel. In Proceedings of the 10th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2005), September J. Agron, D. Andrews, M. Finley, E. Komp, and W. Peck. FPGA Implementation of a Priority Scheduler Module. In Proceedings of the 25th IEEE International Real-Time Systems Symposium, Works in Progress Session (RTSS WIP 2004), December W. Peck,J. Agron, D. Andrews, M. Finley, and E. Komp. Hardware/Software Co-Design of Operating System Services for Thread Management and Scheduling. In Proceedings of the 25th IEEE International Real-Time Systems Symposium, Works in Progress Session (RTSS WIP 2004), December 2004.
, April 2006.")
4 Overview HybridThreads Project. Primary Goals Basic Architecture Purpose of my work. Comparison to related works. Designs, Implementations, Results. Conclusion. Questions.

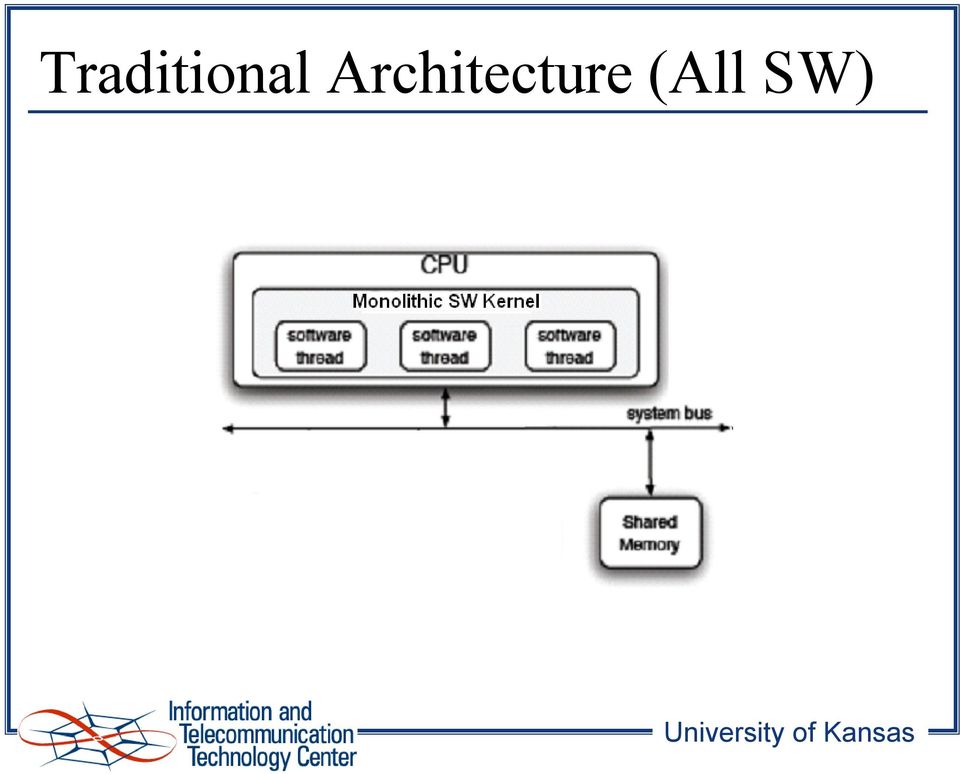
5 HybridThreads Project Hybrid architecture = CPU + FPGA. Portions of programs can now be in SW or HW. Create a unified programming model. Threaded programming model based on POSIX standard. All computations are viewed as threads. HW, SW, or both. HW/SW co-design of OS services. OS services can be implemented in HW to give a uniform interface to hybrid computations. Anyone that can talk on the bus can use the services. No need to interrupt the CPU to access services. HW implementations allow for more parallelism to be exploited. OS services themselves run in parallel with application execution (coarsegrained). Internals of each OS service can be parallelized (fine-grained) Improves accessibility to resources of the FPGA.

6 Traditional Architecture (All SW)
7 HybridThread Architecture

8 Purpose of my work Provide scheduling support for hybrid threads. Uniform APIs, regardless of thread type. Allow for high-level scheduling policies. Add priority scheduling. Separate OS policy concerns More modular (scheduling!= management). Easier to extend and scale within the framework. Minimize overhead and jitter!!! Reduce overhead/jitter of system by streamlining the scheduler.

9 Benefits of a HW-based Scheduler SW-based scheduler is invoke on demand. Starts to get ready when needed. HW-based scheduler is ready on demand. Always ready ASAP.

10 Benefits of a HW-based Scheduler Scheduler can be invoked without interrupting the CPU. Scheduler is the sole bookkeeper of the R2RQ. Scheduler doesn t require CPU time to execute. Traditional ISRs are translated into ISTs (Interrupt Service Threads). Traditional ISRs are akin to threads with priority level of. CPU can be shielded from external interrupts by transforming them into scheduling requests. Interrupts are then fielded by the scheduler, not the CPU. Scheduler decides when to interrupt CPU based on status of R2RQ. Jitter from interrupts can be controlled: Critical interrupts = high priority interrupt all user threads. Non-Critical interrupts = low priority interrupt some user threads. Scheduling algorithm can be parallelized. Reduction of overhead and jitter.

11 Related Works RealFast/Malardalen RTU: Real- Time Unit, A Real-Time Kernel in Hardware. Systolic array implementation of R2RQ. EDF, PRI, RM capable. Can handle 16 tasks with 8 priority levels. Georgia Tech Configurable Hardware Scheduler for Real-Time Systems. Systolic array implementation of R2RQ. EDF, PRI, RM capable. 421 logic elements (slices), and 564 registers for queue of size 16. Valencia/Valle A Hardware Scheduler for Complex Real-Time Systems. Systolic array implementation of R2RQ. EDF capable.
, and 564 registers for queue of size 16.")
12 Problems with Systolic Arrays Systolic arrays are fast and easily allow for dynamic changes in priority. Registers within cells allow for parallel accesses Systolic arrays are easily scaled through cell concatenation. Each cell requires registers, multiplexers, comparators, and control logic. Scaling systolic arrays requires lots of logic resources! But HW threads require logic resources of FPGA! HybridThread OS modules need to be as small as possible to save space for HW threads. BRAMs are to be used instead of registers to hold ready-to-run queue structure. Pros: Scalable: more space use more BRAM and slightly more logic. BRAMs don t take up CLBs BUT address decode logic and pointers will grow slightly. Fast: 2 clock cycle reads, 1 clock cycle writes. Almost as fast as registers. Cons: Serial: Only 1 or 2 accesses at a time. Dynamic priority changes can t happen in parallel.

13 Comparison to Related Works HybridThreads is compatible with the POSIX (Pthread) thread standard. RealFast/GaTech/Valencia use their own custom APIs. Doesn t allow for easy portability between systems. HybridThreads R2RQ is of size 256. RealFast/GaTech only have R2RQs of size 16. Systolic queue of size 16 requires ~421 slices BRAM queue of size 256 requires ~484 slices. HybridThreads must support scheduling of both SW and HW resident tasks. Other systems only handle SW threads. HybridThreads system is real simulatable, synthesizable, and usable. Valencia s scheduler is only theoretical. RealFast/GaTech have real systems BUT you must learn their custom APIs to use their systems. Pthreads applications can be ported to HybridThreads for free Using our pthread to hthread wrapper.

14 Initial Design Break scheduling services out of TM. Define a standard interface. Create a R2RQ that is separate from management data structures. Add priority scheduling services (while still remaining backwards compatible).

15 Internals of First Redesign
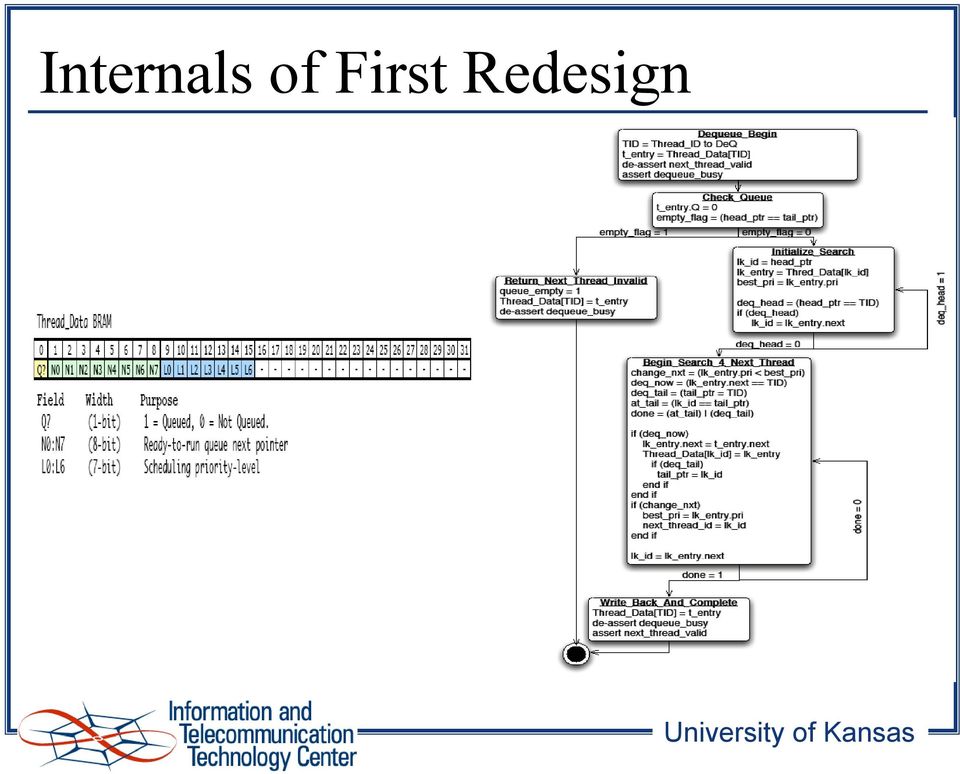
16 Initial Results R2RQ of size 256 with 128 priority levels. Linear traversals O(n). Synthesized on Virtex-II Pro 30: 484 out of 13,696 slices, 573 out of 27,392 flip-flops, 873 out of 27,392 4-input LUTs, 1 out of 136 BRAMs. Max. operating frequency of MHz. Scheduling decision requires ~40 ns per thread in R2RQ. Variable execution-time based on R2RQ length.

17 O(n) Timing Results O(n) Variable scheduling decision delay based on R2RQ length. Context switch requires ~ 2µs (R2RQ 32 threads) decision completes before C.S. completes (R2RQ > 32 threads) decision completes after C.S. completes As R2RQ length increases so does the possibility of a scheduling event occurring while the next scheduling decision is still being calculated, thus introducing jitter into the system.

18 O(n) Timing Results Raw interrupt delay = time from when an interrupt fires to when the CPU enters the ISR. System dependent, cannot be changed due to variable length execution times of atomic instructions that delay interrupt acknowledgement. Not affected by number of threads in R2RQ Mean = 0.79 µs. and Jitter = (Max Mean) = 0.73 µs. End-to-end scheduling delay = time from when an interrupt fires to when the C.S. is about to complete (old context saved, new context about to be loaded). Mean = 2.0 µs. and Jitter = (Max Mean) = 2.4 µs with 250 threads in R2RQ. Jitter is caused by scheduler module and cache. Raw interrupt delay makes up a significant portion (~ 1/3) of end-to-end scheduling delay.
. Mean = 2.0 µs. and Jitter = (Max Mean) = 2.4 µs with 250 threads in R2RQ.")
19 Accomplishments of 1st Design Developed a standard scheduling interface. Enforces policy, while leaving the mechanism abstract. Provides HPF, FIFO, Round-Robin scheduling services. O(n) scheduling decisions. FIFO R2RQ requires traversal. Decision is slower than context switch sometimes. Long R2RQ = Long traversal. Conclusion: Performance could be better. 2.0 µs. end-to-end scheduling delay with 250 threads with 2.4 µs. of jitter is pretty good. Linux delay is in the millisecond range! RealFast/Malardalen s RTU is in the 40 µs range! Still need control of both SW and HW threads.

20 Second Redesign Change R2RQ structure to reduce overhead and jitter. Solution = Partitioned R2RQ + Priority Encoder!

21 Priority Encoder Priority Encoder calculates the highest priority level active in the system. Input register: 1-bit per priority level. (1 = active, 0 = non-active). Output register: highest active priority level in the system. Requires 4 clock cycles to execute.
22 Internals of Second Redesign
23 2 nd Redesign Results R2RQ of size 256 with 128 priority levels. No traversals needed fixed execution times. O(1). Synthesized on Virtex-II Pro 30: 1,034 out of 13,696 slices, 522 out of 27,392 flip-flops, 1,900 out of 27,392 4-input LUTs, 2 out of 136 BRAMs. Max. operating frequency of MHz. Scheduling decision executes in fixed amount of time (~ 24 clock cycles).
24 O(1) Timing Results O(1) Constant scheduling decision delay regardless of R2RQ length. All scheduling operations execute in fixed amount of time that is less than C.S. time. Scheduling operations do not inject any jitter into the system!
25 O(1) Timing Results Raw interrupt delay was re-measured and found to be the same as in the system with O(n) R2RQ. Mean = 0.79 µs. and Jitter = (Max Mean) = 0.73 µs. End-to-end scheduling delay changed based on redesign of scheduler. Mean = 1.9 µs. and Jitter = (Max Mean) = 1.4 µs with 250 threads in R2RQ. Jitter is caused by the cache. O(1) R2RQ helped to reduce the jitter by approximately 1 µs!
26 2 nd Redesign Accomplishments Partitioned R2RQ + Priority Encoder: Executes quickly and in constant time. O(1). ~ 24 clock cycles. Priority Encoder: Responsible for scheduling decision (priority level selection). Functionality can be changed (hierarchical). Conclusion: Scheduling overhead and jitter have been reduced. Still need support for both SW and HW threads.
27 Third Redesign Provide services for hybrid threads. SW threads covered. HW threads -???. What else changes? All policies deal with threads; which ones need to know where they are? Management allocation, creation, status of TIDs. Scheduling which TID should run when and where. Only the scheduler needs to be changed in order to hybridize the system! Could these changes be encoded in the scheduling parameter...
28 Internals of Third Redesign
29 3 rd Redesign Results R2RQ of size 256 with 128 priority levels. O(1). Synthesized on Virtex-II Pro 30: 1,455 out of 13,696 slices, 973 out of 27,392 flip-flops, 2,425 out of 27,392 4-input LUTs, 3 out of 136 BRAMs. Max. operating frequency of MHz. Scheduling decision executes in fixed amount of time (~ 24 clock cycles). Uniform support for both SW and HW threads. Thread type encoded in scheduling parameter Low-overhead and jitter scheduling support for SW and HW threads!
30 3rd Redesign Accomplishments Encode HW/SW distinction in sched. parameter. SP < 128 (SW thread, priority) SP >= 128 (HW thread, address of cmd. reg.) Only the scheduler had to change! Add Master-IPIF. Add storage for larger SP. ENQ check SP. SW threads: Add SW thread to R2RQ. HW threads: Send START command to HW thread. Entire system is now truly hybridized.
31 Hybrid O(1) Timing Results Timing results for tests involving only SW threads remain the same as for non-hybrid O(1) scheduler. System is now hybrid compliant. Operations can be used by both SW and HW threads.
32 Overall Accomplishments HW/SW co-design of scheduling services allows for: Complexity of OS to be pushed into hardware. Relieves CPU of duties OS coprocessors do the work. Less kernel code. More parallelism within the system can be exploited. Internals of scheduler are parallelized, and application and OS run in parallel. Breaking up management and scheduling through a standard interface allows for: Greater maintainability Mechanisms of each can be modified independently. Separation of concerns All OS components became hybridized by hybridizing the scheduler.
33 Results & Conclusion Three design iterations: 1 st - Enable priority scheduling O(n). Still needed to improve performance. 2 nd - Improve performance O(1). Needed to provide hybrid support. 3 rd - Combine O(1) with hybrid features. Provides FULL system support for ALL threads in a system!!! The Result: OS services with generalized support for SW and HW threads. Super low overhead and jitter. Highly scalable due to on-chip BRAMs. Standard interface defined for scheduling operations and data storage.
34 Questions??? More information at I can be contacted at jagron@ittc.ku.edu.
A Configurable Hardware Scheduler for Real-Time Systems
 A Configurable Hardware Scheduler for Real-Time Systems Pramote Kuacharoen, Mohamed A. Shalan and Vincent J. Mooney III Center for Research on Embedded Systems and Technology School of Electrical and Computer
A Configurable Hardware Scheduler for Real-Time Systems Pramote Kuacharoen, Mohamed A. Shalan and Vincent J. Mooney III Center for Research on Embedded Systems and Technology School of Electrical and Computer
Reconfigurable Architecture Requirements for Co-Designed Virtual Machines
 Reconfigurable Architecture Requirements for Co-Designed Virtual Machines Kenneth B. Kent University of New Brunswick Faculty of Computer Science Fredericton, New Brunswick, Canada ken@unb.ca Micaela Serra
Reconfigurable Architecture Requirements for Co-Designed Virtual Machines Kenneth B. Kent University of New Brunswick Faculty of Computer Science Fredericton, New Brunswick, Canada ken@unb.ca Micaela Serra
How to Perform Real-Time Processing on the Raspberry Pi. Steven Doran SCALE 13X
 How to Perform Real-Time Processing on the Raspberry Pi Steven Doran SCALE 13X Outline What is Real-Time? What is the Raspberry Pi? Can the Raspberry Pi handle Real-Time (And why would you want to? Why
How to Perform Real-Time Processing on the Raspberry Pi Steven Doran SCALE 13X Outline What is Real-Time? What is the Raspberry Pi? Can the Raspberry Pi handle Real-Time (And why would you want to? Why
Abstracting the Hardware / Software Boundary through a Standard System Support Layer and Architecture
 Abstracting the Hardware / Software Boundary through a Standard System Support Layer and Architecture Erik Konrad Anderson Submitted to the Department of Electrical Engineering & Computer Science and the
Abstracting the Hardware / Software Boundary through a Standard System Support Layer and Architecture Erik Konrad Anderson Submitted to the Department of Electrical Engineering & Computer Science and the
Last Class: OS and Computer Architecture. Last Class: OS and Computer Architecture
 Last Class: OS and Computer Architecture System bus Network card CPU, memory, I/O devices, network card, system bus Lecture 3, page 1 Last Class: OS and Computer Architecture OS Service Protection Interrupts
Last Class: OS and Computer Architecture System bus Network card CPU, memory, I/O devices, network card, system bus Lecture 3, page 1 Last Class: OS and Computer Architecture OS Service Protection Interrupts
Making Multicore Work and Measuring its Benefits. Markus Levy, president EEMBC and Multicore Association
 Making Multicore Work and Measuring its Benefits Markus Levy, president EEMBC and Multicore Association Agenda Why Multicore? Standards and issues in the multicore community What is Multicore Association?
Making Multicore Work and Measuring its Benefits Markus Levy, president EEMBC and Multicore Association Agenda Why Multicore? Standards and issues in the multicore community What is Multicore Association?
OPTIMIZE DMA CONFIGURATION IN ENCRYPTION USE CASE. Guillène Ribière, CEO, System Architect
 OPTIMIZE DMA CONFIGURATION IN ENCRYPTION USE CASE Guillène Ribière, CEO, System Architect Problem Statement Low Performances on Hardware Accelerated Encryption: Max Measured 10MBps Expectations: 90 MBps
OPTIMIZE DMA CONFIGURATION IN ENCRYPTION USE CASE Guillène Ribière, CEO, System Architect Problem Statement Low Performances on Hardware Accelerated Encryption: Max Measured 10MBps Expectations: 90 MBps
FPGA area allocation for parallel C applications
 1 FPGA area allocation for parallel C applications Vlad-Mihai Sima, Elena Moscu Panainte, Koen Bertels Computer Engineering Faculty of Electrical Engineering, Mathematics and Computer Science Delft University
1 FPGA area allocation for parallel C applications Vlad-Mihai Sima, Elena Moscu Panainte, Koen Bertels Computer Engineering Faculty of Electrical Engineering, Mathematics and Computer Science Delft University
POSIX. RTOSes Part I. POSIX Versions. POSIX Versions (2)
") RTOSes Part I Christopher Kenna September 24, 2010 POSIX Portable Operating System for UnIX Application portability at source-code level POSIX Family formally known as IEEE 1003 Originally 17 separate
RTOSes Part I Christopher Kenna September 24, 2010 POSIX Portable Operating System for UnIX Application portability at source-code level POSIX Family formally known as IEEE 1003 Originally 17 separate
Last Class: OS and Computer Architecture. Last Class: OS and Computer Architecture
 Last Class: OS and Computer Architecture System bus Network card CPU, memory, I/O devices, network card, system bus Lecture 3, page 1 Last Class: OS and Computer Architecture OS Service Protection Interrupts
Last Class: OS and Computer Architecture System bus Network card CPU, memory, I/O devices, network card, system bus Lecture 3, page 1 Last Class: OS and Computer Architecture OS Service Protection Interrupts
Quantum Support for Multiprocessor Pfair Scheduling in Linux
 Quantum Support for Multiprocessor fair Scheduling in Linux John M. Calandrino and James H. Anderson Department of Computer Science, The University of North Carolina at Chapel Hill Abstract This paper
Quantum Support for Multiprocessor fair Scheduling in Linux John M. Calandrino and James H. Anderson Department of Computer Science, The University of North Carolina at Chapel Hill Abstract This paper
Decomposition into Parts. Software Engineering, Lecture 4. Data and Function Cohesion. Allocation of Functions and Data. Component Interfaces
 Software Engineering, Lecture 4 Decomposition into suitable parts Cross cutting concerns Design patterns I will also give an example scenario that you are supposed to analyse and make synthesis from The
Software Engineering, Lecture 4 Decomposition into suitable parts Cross cutting concerns Design patterns I will also give an example scenario that you are supposed to analyse and make synthesis from The
Arquitectura Virtex. Delay-Locked Loop (DLL)
") Arquitectura Virtex Compuesta de dos elementos principales configurables : CLBs y IOBs. Los CLBs se interconectan a través de una matriz general de routeado (GRM). Posse una intefaz VersaRing que proporciona
Arquitectura Virtex Compuesta de dos elementos principales configurables : CLBs y IOBs. Los CLBs se interconectan a través de una matriz general de routeado (GRM). Posse una intefaz VersaRing que proporciona
An Implementation Of Multiprocessor Linux
 An Implementation Of Multiprocessor Linux This document describes the implementation of a simple SMP Linux kernel extension and how to use this to develop SMP Linux kernels for architectures other than
An Implementation Of Multiprocessor Linux This document describes the implementation of a simple SMP Linux kernel extension and how to use this to develop SMP Linux kernels for architectures other than
PROGRAMMING MODELS FOR HYBRID FPGA-CPU COMPUTATIONAL COMPONENTS: A MISSING LINK
 PROGRAMMING MODELS FOR HYBRID FPGA-CPU COMPUTATIONAL COMPONENTS: A MISSING LINK EMERGING HYBRID CHIPS CONTAINING CPU AND FPGA COMPONENTS ARE AN EXCITING NEW DEVELOPMENT PROMISING COMMERCIAL OFF-THE-SHELF
PROGRAMMING MODELS FOR HYBRID FPGA-CPU COMPUTATIONAL COMPONENTS: A MISSING LINK EMERGING HYBRID CHIPS CONTAINING CPU AND FPGA COMPONENTS ARE AN EXCITING NEW DEVELOPMENT PROMISING COMMERCIAL OFF-THE-SHELF
Predictable response times in event-driven real-time systems
 Predictable response times in event-driven real-time systems Automotive 2006 - Security and Reliability in Automotive Systems Stuttgart, October 2006. Presented by: Michael González Harbour mgh@unican.es
Predictable response times in event-driven real-time systems Automotive 2006 - Security and Reliability in Automotive Systems Stuttgart, October 2006. Presented by: Michael González Harbour mgh@unican.es
Real-Time Operating Systems. http://soc.eurecom.fr/os/
 Institut Mines-Telecom Ludovic Apvrille ludovic.apvrille@telecom-paristech.fr Eurecom, office 470 http://soc.eurecom.fr/os/ Outline 2/66 Fall 2014 Institut Mines-Telecom Definitions What is an Embedded
Institut Mines-Telecom Ludovic Apvrille ludovic.apvrille@telecom-paristech.fr Eurecom, office 470 http://soc.eurecom.fr/os/ Outline 2/66 Fall 2014 Institut Mines-Telecom Definitions What is an Embedded
A Hardware and Software Monitor for High-Level System-on-Chip Verification
 A Hardware and Software Monitor for High-Level System-on-Chip Verification M. El Shobaki and L. Lindh International Symposium on Quality Electronic Design, 2001 Presenter: Gu, Ruei-Ting What s the problem?
A Hardware and Software Monitor for High-Level System-on-Chip Verification M. El Shobaki and L. Lindh International Symposium on Quality Electronic Design, 2001 Presenter: Gu, Ruei-Ting What s the problem?
Distributed Elastic Switch Architecture for efficient Networks-on-FPGAs
 Distributed Elastic Switch Architecture for efficient Networks-on-FPGAs Antoni Roca, Jose Flich Parallel Architectures Group Universitat Politechnica de Valencia (UPV) Valencia, Spain Giorgos Dimitrakopoulos
Distributed Elastic Switch Architecture for efficient Networks-on-FPGAs Antoni Roca, Jose Flich Parallel Architectures Group Universitat Politechnica de Valencia (UPV) Valencia, Spain Giorgos Dimitrakopoulos
Outline. Introduction. Multiprocessor Systems on Chip. A MPSoC Example: Nexperia DVP. A New Paradigm: Network on Chip
 Outline Modeling, simulation and optimization of Multi-Processor SoCs (MPSoCs) Università of Verona Dipartimento di Informatica MPSoCs: Multi-Processor Systems on Chip A simulation platform for a MPSoC
Outline Modeling, simulation and optimization of Multi-Processor SoCs (MPSoCs) Università of Verona Dipartimento di Informatica MPSoCs: Multi-Processor Systems on Chip A simulation platform for a MPSoC
Attaining EDF Task Scheduling with O(1) Time Complexity
 Time Complexity") Attaining EDF Task Scheduling with O(1) Time Complexity Verber Domen University of Maribor, Faculty of Electrical Engineering and Computer Sciences, Maribor, Slovenia (e-mail: domen.verber@uni-mb.si) Abstract:
Attaining EDF Task Scheduling with O(1) Time Complexity Verber Domen University of Maribor, Faculty of Electrical Engineering and Computer Sciences, Maribor, Slovenia (e-mail: domen.verber@uni-mb.si) Abstract:
Embedded Systems: map to FPGA, GPU, CPU?
 Embedded Systems: map to FPGA, GPU, CPU? Jos van Eijndhoven jos@vectorfabrics.com Bits&Chips Embedded systems Nov 7, 2013 # of transistors Moore s law versus Amdahl s law Computational Capacity Hardware
Embedded Systems: map to FPGA, GPU, CPU? Jos van Eijndhoven jos@vectorfabrics.com Bits&Chips Embedded systems Nov 7, 2013 # of transistors Moore s law versus Amdahl s law Computational Capacity Hardware
Testing of Digital System-on- Chip (SoC)
") Testing of Digital System-on- Chip (SoC) 1 Outline of the Talk Introduction to system-on-chip (SoC) design Approaches to SoC design SoC test requirements and challenges Core test wrapper P1500 core test
Testing of Digital System-on- Chip (SoC) 1 Outline of the Talk Introduction to system-on-chip (SoC) design Approaches to SoC design SoC test requirements and challenges Core test wrapper P1500 core test
Automatic Reconfigurable System-on-Chip Design with Run-Time Hardware/Software Partitioning
 Automatic Reconfigurable System-on-Chip Design with Run-Time Hardware/Software Partitioning Yu Chen, Ren-Fa Li, and Qiang Wu College of Computer and Communication, Hunan University, Changsha, China. pnompenh@gmail.com
Automatic Reconfigurable System-on-Chip Design with Run-Time Hardware/Software Partitioning Yu Chen, Ren-Fa Li, and Qiang Wu College of Computer and Communication, Hunan University, Changsha, China. pnompenh@gmail.com
A Framework for Automatic Generation of Configuration Files for a Custom Hardware/Software RTOS
 A Framework for Automatic Generation of Configuration Files for a Custom Hardware/Software Jaehwan Lee, Kyeong Keol Ryu and Vincent John Mooney III School of Electrical and Computer Engineering Georgia
A Framework for Automatic Generation of Configuration Files for a Custom Hardware/Software Jaehwan Lee, Kyeong Keol Ryu and Vincent John Mooney III School of Electrical and Computer Engineering Georgia
Achieving Nanosecond Latency Between Applications with IPC Shared Memory Messaging
 Achieving Nanosecond Latency Between Applications with IPC Shared Memory Messaging In some markets and scenarios where competitive advantage is all about speed, speed is measured in micro- and even nano-seconds.
Achieving Nanosecond Latency Between Applications with IPC Shared Memory Messaging In some markets and scenarios where competitive advantage is all about speed, speed is measured in micro- and even nano-seconds.
Virtualized Execution and Management of Hardware Tasks on a Hybrid ARM-FPGA Platform
 J Sign Process Syst (2014) 77:61 76 DOI 10.1007/s11265-014-0884-1 Virtualized Execution and Management of Hardware Tasks on a Hybrid ARM-FPGA Platform Abhishek Kumar Jain Khoa Dang Pham Jin Cui Suhaib
J Sign Process Syst (2014) 77:61 76 DOI 10.1007/s11265-014-0884-1 Virtualized Execution and Management of Hardware Tasks on a Hybrid ARM-FPGA Platform Abhishek Kumar Jain Khoa Dang Pham Jin Cui Suhaib
Introduction to Embedded Systems. Software Update Problem
 Introduction to Embedded Systems CS/ECE 6780/5780 Al Davis logistics minor Today s topics: more software development issues 1 CS 5780 Software Update Problem Lab machines work let us know if they don t
Introduction to Embedded Systems CS/ECE 6780/5780 Al Davis logistics minor Today s topics: more software development issues 1 CS 5780 Software Update Problem Lab machines work let us know if they don t
Lecture 3 Theoretical Foundations of RTOS
 CENG 383 Real-Time Systems Lecture 3 Theoretical Foundations of RTOS Asst. Prof. Tolga Ayav, Ph.D. Department of Computer Engineering Task States Executing Ready Suspended (or blocked) Dormant (or sleeping)
CENG 383 Real-Time Systems Lecture 3 Theoretical Foundations of RTOS Asst. Prof. Tolga Ayav, Ph.D. Department of Computer Engineering Task States Executing Ready Suspended (or blocked) Dormant (or sleeping)
Von der Hardware zur Software in FPGAs mit Embedded Prozessoren. Alexander Hahn Senior Field Application Engineer Lattice Semiconductor
 Von der Hardware zur Software in FPGAs mit Embedded Prozessoren Alexander Hahn Senior Field Application Engineer Lattice Semiconductor AGENDA Overview Mico32 Embedded Processor Development Tool Chain HW/SW
Von der Hardware zur Software in FPGAs mit Embedded Prozessoren Alexander Hahn Senior Field Application Engineer Lattice Semiconductor AGENDA Overview Mico32 Embedded Processor Development Tool Chain HW/SW
Architectures and Platforms
 Hardware/Software Codesign Arch&Platf. - 1 Architectures and Platforms 1. Architecture Selection: The Basic Trade-Offs 2. General Purpose vs. Application-Specific Processors 3. Processor Specialisation
Hardware/Software Codesign Arch&Platf. - 1 Architectures and Platforms 1. Architecture Selection: The Basic Trade-Offs 2. General Purpose vs. Application-Specific Processors 3. Processor Specialisation
Notes and terms of conditions. Vendor shall note the following terms and conditions/ information before they submit their quote.
 Specifications for ARINC 653 compliant RTOS & Development Environment Notes and terms of conditions Vendor shall note the following terms and conditions/ information before they submit their quote. 1.
Specifications for ARINC 653 compliant RTOS & Development Environment Notes and terms of conditions Vendor shall note the following terms and conditions/ information before they submit their quote. 1.
Design and Implementation of the Heterogeneous Multikernel Operating System
 223 Design and Implementation of the Heterogeneous Multikernel Operating System Yauhen KLIMIANKOU Department of Computer Systems and Networks, Belarusian State University of Informatics and Radioelectronics,
223 Design and Implementation of the Heterogeneous Multikernel Operating System Yauhen KLIMIANKOU Department of Computer Systems and Networks, Belarusian State University of Informatics and Radioelectronics,
White Paper. Real-time Capabilities for Linux SGI REACT Real-Time for Linux
 White Paper Real-time Capabilities for Linux SGI REACT Real-Time for Linux Abstract This white paper describes the real-time capabilities provided by SGI REACT Real-Time for Linux. software. REACT enables
White Paper Real-time Capabilities for Linux SGI REACT Real-Time for Linux Abstract This white paper describes the real-time capabilities provided by SGI REACT Real-Time for Linux. software. REACT enables
Networking Remote-Controlled Moving Image Monitoring System
 Networking Remote-Controlled Moving Image Monitoring System First Prize Networking Remote-Controlled Moving Image Monitoring System Institution: Participants: Instructor: National Chung Hsing University
Networking Remote-Controlled Moving Image Monitoring System First Prize Networking Remote-Controlled Moving Image Monitoring System Institution: Participants: Instructor: National Chung Hsing University
Weighted Total Mark. Weighted Exam Mark
 CMP2204 Operating System Technologies Period per Week Contact Hour per Semester Total Mark Exam Mark Continuous Assessment Mark Credit Units LH PH TH CH WTM WEM WCM CU 45 30 00 60 100 40 100 4 Rationale
CMP2204 Operating System Technologies Period per Week Contact Hour per Semester Total Mark Exam Mark Continuous Assessment Mark Credit Units LH PH TH CH WTM WEM WCM CU 45 30 00 60 100 40 100 4 Rationale
EECE 276 Embedded Systems
 EECE 276 Embedded Systems Embedded SW Architectures Round-robin Function-queue scheduling EECE 276 Embedded Systems Embedded Software Architectures 1 Software Architecture How to do things how to arrange
EECE 276 Embedded Systems Embedded SW Architectures Round-robin Function-queue scheduling EECE 276 Embedded Systems Embedded Software Architectures 1 Software Architecture How to do things how to arrange
Network Traffic Monitoring an architecture using associative processing.
 Network Traffic Monitoring an architecture using associative processing. Gerald Tripp Technical Report: 7-99 Computing Laboratory, University of Kent 1 st September 1999 Abstract This paper investigates
Network Traffic Monitoring an architecture using associative processing. Gerald Tripp Technical Report: 7-99 Computing Laboratory, University of Kent 1 st September 1999 Abstract This paper investigates
Process Scheduling CS 241. February 24, 2012. Copyright University of Illinois CS 241 Staff
 Process Scheduling CS 241 February 24, 2012 Copyright University of Illinois CS 241 Staff 1 Announcements Mid-semester feedback survey (linked off web page) MP4 due Friday (not Tuesday) Midterm Next Tuesday,
Process Scheduling CS 241 February 24, 2012 Copyright University of Illinois CS 241 Staff 1 Announcements Mid-semester feedback survey (linked off web page) MP4 due Friday (not Tuesday) Midterm Next Tuesday,
CMS Level 1 Track Trigger
 Institut für Technik der Informationsverarbeitung CMS Level 1 Track Trigger An FPGA Approach Management Prof. Dr.-Ing. Dr. h.c. J. Becker Prof. Dr.-Ing. Eric Sax Prof. Dr. rer. nat. W. Stork KIT University
Institut für Technik der Informationsverarbeitung CMS Level 1 Track Trigger An FPGA Approach Management Prof. Dr.-Ing. Dr. h.c. J. Becker Prof. Dr.-Ing. Eric Sax Prof. Dr. rer. nat. W. Stork KIT University
Effective Computing with SMP Linux
 Effective Computing with SMP Linux Multi-processor systems were once a feature of high-end servers and mainframes, but today, even desktops for personal use have multiple processors. Linux is a popular
Effective Computing with SMP Linux Multi-processor systems were once a feature of high-end servers and mainframes, but today, even desktops for personal use have multiple processors. Linux is a popular
Operating Systems Concepts: Chapter 7: Scheduling Strategies
 Operating Systems Concepts: Chapter 7: Scheduling Strategies Olav Beckmann Huxley 449 http://www.doc.ic.ac.uk/~ob3 Acknowledgements: There are lots. See end of Chapter 1. Home Page for the course: http://www.doc.ic.ac.uk/~ob3/teaching/operatingsystemsconcepts/
Operating Systems Concepts: Chapter 7: Scheduling Strategies Olav Beckmann Huxley 449 http://www.doc.ic.ac.uk/~ob3 Acknowledgements: There are lots. See end of Chapter 1. Home Page for the course: http://www.doc.ic.ac.uk/~ob3/teaching/operatingsystemsconcepts/
Comparison between scheduling algorithms in RTLinux and VxWorks
 Comparison between scheduling algorithms in RTLinux and VxWorks Linköpings Universitet Linköping 2006-11-19 Daniel Forsberg (danfo601@student.liu.se) Magnus Nilsson (magni141@student.liu.se) Abstract The
Comparison between scheduling algorithms in RTLinux and VxWorks Linköpings Universitet Linköping 2006-11-19 Daniel Forsberg (danfo601@student.liu.se) Magnus Nilsson (magni141@student.liu.se) Abstract The
Chapter 3 Operating-System Structures
 Contents 1. Introduction 2. Computer-System Structures 3. Operating-System Structures 4. Processes 5. Threads 6. CPU Scheduling 7. Process Synchronization 8. Deadlocks 9. Memory Management 10. Virtual
Contents 1. Introduction 2. Computer-System Structures 3. Operating-System Structures 4. Processes 5. Threads 6. CPU Scheduling 7. Process Synchronization 8. Deadlocks 9. Memory Management 10. Virtual
FlexPath Network Processor
 FlexPath Network Processor Rainer Ohlendorf Thomas Wild Andreas Herkersdorf Prof. Dr. Andreas Herkersdorf Arcisstraße 21 80290 München http://www.lis.ei.tum.de Agenda FlexPath Introduction Work Packages
FlexPath Network Processor Rainer Ohlendorf Thomas Wild Andreas Herkersdorf Prof. Dr. Andreas Herkersdorf Arcisstraße 21 80290 München http://www.lis.ei.tum.de Agenda FlexPath Introduction Work Packages
Contents. System Development Models and Methods. Design Abstraction and Views. Synthesis. Control/Data-Flow Models. System Synthesis Models
 System Development Models and Methods Dipl.-Inf. Mirko Caspar Version: 10.02.L.r-1.0-100929 Contents HW/SW Codesign Process Design Abstraction and Views Synthesis Control/Data-Flow Models System Synthesis
System Development Models and Methods Dipl.-Inf. Mirko Caspar Version: 10.02.L.r-1.0-100929 Contents HW/SW Codesign Process Design Abstraction and Views Synthesis Control/Data-Flow Models System Synthesis
Best Practises for LabVIEW FPGA Design Flow. uk.ni.com ireland.ni.com
 Best Practises for LabVIEW FPGA Design Flow 1 Agenda Overall Application Design Flow Host, Real-Time and FPGA LabVIEW FPGA Architecture Development FPGA Design Flow Common FPGA Architectures Testing and
Best Practises for LabVIEW FPGA Design Flow 1 Agenda Overall Application Design Flow Host, Real-Time and FPGA LabVIEW FPGA Architecture Development FPGA Design Flow Common FPGA Architectures Testing and
GEDAE TM - A Graphical Programming and Autocode Generation Tool for Signal Processor Applications
 GEDAE TM - A Graphical Programming and Autocode Generation Tool for Signal Processor Applications Harris Z. Zebrowitz Lockheed Martin Advanced Technology Laboratories 1 Federal Street Camden, NJ 08102
GEDAE TM - A Graphical Programming and Autocode Generation Tool for Signal Processor Applications Harris Z. Zebrowitz Lockheed Martin Advanced Technology Laboratories 1 Federal Street Camden, NJ 08102
Hardware Task Scheduling and Placement in Operating Systems for Dynamically Reconfigurable SoC
 Hardware Task Scheduling and Placement in Operating Systems for Dynamically Reconfigurable SoC Yuan-Hsiu Chen and Pao-Ann Hsiung National Chung Cheng University, Chiayi, Taiwan 621, ROC. pahsiung@cs.ccu.edu.tw
Hardware Task Scheduling and Placement in Operating Systems for Dynamically Reconfigurable SoC Yuan-Hsiu Chen and Pao-Ann Hsiung National Chung Cheng University, Chiayi, Taiwan 621, ROC. pahsiung@cs.ccu.edu.tw
CS 377: Operating Systems. Outline. A review of what you ve learned, and how it applies to a real operating system. Lecture 25 - Linux Case Study
 CS 377: Operating Systems Lecture 25 - Linux Case Study Guest Lecturer: Tim Wood Outline Linux History Design Principles System Overview Process Scheduling Memory Management File Systems A review of what
CS 377: Operating Systems Lecture 25 - Linux Case Study Guest Lecturer: Tim Wood Outline Linux History Design Principles System Overview Process Scheduling Memory Management File Systems A review of what
Beyond Virtualization: A Novel Software Architecture for Multi-Core SoCs. Jim Ready September 18, 2012
 Beyond Virtualization: A Novel Software Architecture for Multi-Core SoCs Jim Ready September 18, 2012 How HW guys view the world SW Software HW How SW guys view the world SW HW Reality The SoC Software
Beyond Virtualization: A Novel Software Architecture for Multi-Core SoCs Jim Ready September 18, 2012 How HW guys view the world SW Software HW How SW guys view the world SW HW Reality The SoC Software
International Workshop on Field Programmable Logic and Applications, FPL '99
 International Workshop on Field Programmable Logic and Applications, FPL '99 DRIVE: An Interpretive Simulation and Visualization Environment for Dynamically Reconægurable Systems? Kiran Bondalapati and
International Workshop on Field Programmable Logic and Applications, FPL '99 DRIVE: An Interpretive Simulation and Visualization Environment for Dynamically Reconægurable Systems? Kiran Bondalapati and
HARDWARE IMPLEMENTATION OF TASK MANAGEMENT IN EMBEDDED REAL-TIME OPERATING SYSTEMS
 HARDWARE IMPLEMENTATION OF TASK MANAGEMENT IN EMBEDDED REAL-TIME OPERATING SYSTEMS 1 SHI-HAI ZHU 1Department of Computer and Information Engineering, Zhejiang Water Conservancy and Hydropower College Hangzhou,
HARDWARE IMPLEMENTATION OF TASK MANAGEMENT IN EMBEDDED REAL-TIME OPERATING SYSTEMS 1 SHI-HAI ZHU 1Department of Computer and Information Engineering, Zhejiang Water Conservancy and Hydropower College Hangzhou,
AMD Opteron Quad-Core
 AMD Opteron Quad-Core a brief overview Daniele Magliozzi Politecnico di Milano Opteron Memory Architecture native quad-core design (four cores on a single die for more efficient data sharing) enhanced
AMD Opteron Quad-Core a brief overview Daniele Magliozzi Politecnico di Milano Opteron Memory Architecture native quad-core design (four cores on a single die for more efficient data sharing) enhanced
Computer Architecture
 Computer Architecture Slide Sets WS 2013/2014 Prof. Dr. Uwe Brinkschulte M.Sc. Benjamin Betting Part 11 Memory Management Computer Architecture Part 11 page 1 of 44 Prof. Dr. Uwe Brinkschulte, M.Sc. Benjamin
Computer Architecture Slide Sets WS 2013/2014 Prof. Dr. Uwe Brinkschulte M.Sc. Benjamin Betting Part 11 Memory Management Computer Architecture Part 11 page 1 of 44 Prof. Dr. Uwe Brinkschulte, M.Sc. Benjamin
Operating Systems 4 th Class
 Operating Systems 4 th Class Lecture 1 Operating Systems Operating systems are essential part of any computer system. Therefore, a course in operating systems is an essential part of any computer science
Operating Systems 4 th Class Lecture 1 Operating Systems Operating systems are essential part of any computer system. Therefore, a course in operating systems is an essential part of any computer science
Implementation Details
 LEON3-FT Processor System Scan-I/F FT FT Add-on Add-on 2 2 kbyte kbyte I- I- Cache Cache Scan Scan Test Test UART UART 0 0 UART UART 1 1 Serial 0 Serial 1 EJTAG LEON_3FT LEON_3FT Core Core 8 Reg. Windows
LEON3-FT Processor System Scan-I/F FT FT Add-on Add-on 2 2 kbyte kbyte I- I- Cache Cache Scan Scan Test Test UART UART 0 0 UART UART 1 1 Serial 0 Serial 1 EJTAG LEON_3FT LEON_3FT Core Core 8 Reg. Windows
Framework for Validation, Test and Analysis of Real-time Scheduling Algorithms and Scheduler Implementations
 Framework for Validation, Test and Analysis of Real-time Scheduling Algorithms and Scheduler Implementations Frank Golatowski, Jens Hildebrandt, Jan Blumenthal, Dirk Timmermann Institute of Applied Microelectronics
Framework for Validation, Test and Analysis of Real-time Scheduling Algorithms and Scheduler Implementations Frank Golatowski, Jens Hildebrandt, Jan Blumenthal, Dirk Timmermann Institute of Applied Microelectronics
ESE566 REPORT3. Design Methodologies for Core-based System-on-Chip HUA TANG OVIDIU CARNU
 ESE566 REPORT3 Design Methodologies for Core-based System-on-Chip HUA TANG OVIDIU CARNU Nov 19th, 2002 ABSTRACT: In this report, we discuss several recent published papers on design methodologies of core-based
ESE566 REPORT3 Design Methodologies for Core-based System-on-Chip HUA TANG OVIDIU CARNU Nov 19th, 2002 ABSTRACT: In this report, we discuss several recent published papers on design methodologies of core-based
How To Write Security Enhanced Linux On Embedded Systems (Es) On A Microsoft Linux 2.2.2 (Amd64) (Amd32) (A Microsoft Microsoft 2.3.2) (For Microsoft) (Or
 On A Microsoft Linux 2.2.2 (Amd64) (Amd32) (A Microsoft Microsoft 2.3.2) (For Microsoft) (Or") Security Enhanced Linux on Embedded Systems: a Hardware-accelerated Implementation Leandro Fiorin, Alberto Ferrante Konstantinos Padarnitsas, Francesco Regazzoni University of Lugano Lugano, Switzerland
Security Enhanced Linux on Embedded Systems: a Hardware-accelerated Implementation Leandro Fiorin, Alberto Ferrante Konstantinos Padarnitsas, Francesco Regazzoni University of Lugano Lugano, Switzerland
Production Flash Programming Best Practices for Kinetis K- and L-series MCUs
 Freescale Semiconductor Document Number:AN4835 Application Note Rev 1, 05/2014 Production Flash Programming Best Practices for Kinetis K- and L-series MCUs by: Melissa Hunter 1 Introduction This application
Freescale Semiconductor Document Number:AN4835 Application Note Rev 1, 05/2014 Production Flash Programming Best Practices for Kinetis K- and L-series MCUs by: Melissa Hunter 1 Introduction This application
Chapter 11 I/O Management and Disk Scheduling
 Operating Systems: Internals and Design Principles, 6/E William Stallings Chapter 11 I/O Management and Disk Scheduling Dave Bremer Otago Polytechnic, NZ 2008, Prentice Hall I/O Devices Roadmap Organization
Operating Systems: Internals and Design Principles, 6/E William Stallings Chapter 11 I/O Management and Disk Scheduling Dave Bremer Otago Polytechnic, NZ 2008, Prentice Hall I/O Devices Roadmap Organization
Seeking Opportunities for Hardware Acceleration in Big Data Analytics
 Seeking Opportunities for Hardware Acceleration in Big Data Analytics Paul Chow High-Performance Reconfigurable Computing Group Department of Electrical and Computer Engineering University of Toronto Who
Seeking Opportunities for Hardware Acceleration in Big Data Analytics Paul Chow High-Performance Reconfigurable Computing Group Department of Electrical and Computer Engineering University of Toronto Who
Hardware/Software Co-Design of Run-Time Schedulers for Real-Time Systems
 Design Automation for Embedded Systems, 6, 89 144 (2000) c 2000 Kluwer Academic Publishers, Boston. Manufactured in The Netherlands. Hardware/Software Co-Design of Run-Time Schedulers for Real-Time Systems
Design Automation for Embedded Systems, 6, 89 144 (2000) c 2000 Kluwer Academic Publishers, Boston. Manufactured in The Netherlands. Hardware/Software Co-Design of Run-Time Schedulers for Real-Time Systems
Load Balancing on a Non-dedicated Heterogeneous Network of Workstations
 Load Balancing on a Non-dedicated Heterogeneous Network of Workstations Dr. Maurice Eggen Nathan Franklin Department of Computer Science Trinity University San Antonio, Texas 78212 Dr. Roger Eggen Department
Load Balancing on a Non-dedicated Heterogeneous Network of Workstations Dr. Maurice Eggen Nathan Franklin Department of Computer Science Trinity University San Antonio, Texas 78212 Dr. Roger Eggen Department
Architecting High-Speed Data Streaming Systems. Sujit Basu
 Architecting High-Speed Data Streaming Systems Sujit Basu stream ing [stree-ming] verb 1. The act of transferring data to or from an instrument at a rate high enough to sustain continuous acquisition or
Architecting High-Speed Data Streaming Systems Sujit Basu stream ing [stree-ming] verb 1. The act of transferring data to or from an instrument at a rate high enough to sustain continuous acquisition or
High Performance or Cycle Accuracy?
 CHIP DESIGN High Performance or Cycle Accuracy? You can have both! Bill Neifert, Carbon Design Systems Rob Kaye, ARM ATC-100 AGENDA Modelling 101 & Programmer s View (PV) Models Cycle Accurate Models Bringing
CHIP DESIGN High Performance or Cycle Accuracy? You can have both! Bill Neifert, Carbon Design Systems Rob Kaye, ARM ATC-100 AGENDA Modelling 101 & Programmer s View (PV) Models Cycle Accurate Models Bringing
Building Embedded Systems
 All Rights Reserved. The contents of this document cannot be reproduced without prior permission of the authors. Building Embedded Systems Chapter 2: Building Operating Systems Andreas Knirsch andreas.knirsch@h-da.de
All Rights Reserved. The contents of this document cannot be reproduced without prior permission of the authors. Building Embedded Systems Chapter 2: Building Operating Systems Andreas Knirsch andreas.knirsch@h-da.de
Chapter 2: OS Overview
 Chapter 2: OS Overview CmSc 335 Operating Systems 1. Operating system objectives and functions Operating systems control and support the usage of computer systems. a. usage users of a computer system:
Chapter 2: OS Overview CmSc 335 Operating Systems 1. Operating system objectives and functions Operating systems control and support the usage of computer systems. a. usage users of a computer system:
Chapter 13 Embedded Operating Systems
 Operating Systems: Internals and Design Principles Chapter 13 Embedded Operating Systems Eighth Edition By William Stallings Embedded System Refers to the use of electronics and software within a product
Operating Systems: Internals and Design Principles Chapter 13 Embedded Operating Systems Eighth Edition By William Stallings Embedded System Refers to the use of electronics and software within a product
 Chapter 1: Operating System Models 1 2 Operating System Models 2.1 Introduction Over the past several years, a number of trends affecting operating system design are witnessed and foremost among them is
Chapter 1: Operating System Models 1 2 Operating System Models 2.1 Introduction Over the past several years, a number of trends affecting operating system design are witnessed and foremost among them is
HYRA: A Software-defined Radio Architecture for Wireless Embedded Systems
 HYRA: A Software-defined Radio Architecture for Wireless Embedded Systems Tiago Rogério Mück and Antônio Augusto Fröhlich Federal University of Santa Catarina (UFSC) Software/Hardware Integration Lab (LISHA)
HYRA: A Software-defined Radio Architecture for Wireless Embedded Systems Tiago Rogério Mück and Antônio Augusto Fröhlich Federal University of Santa Catarina (UFSC) Software/Hardware Integration Lab (LISHA)
What is a System on a Chip?
 What is a System on a Chip? Integration of a complete system, that until recently consisted of multiple ICs, onto a single IC. CPU PCI DSP SRAM ROM MPEG SoC DRAM System Chips Why? Characteristics: Complex
What is a System on a Chip? Integration of a complete system, that until recently consisted of multiple ICs, onto a single IC. CPU PCI DSP SRAM ROM MPEG SoC DRAM System Chips Why? Characteristics: Complex
Embedded System Deployment and Management
 Embedded System Deployment and Management Richard Wasell Applications Engineer, NI Norway Agenda Project Based Deployment Overview FPGA Deployment Image vs. Component Based Updates Push Model MAX & LabVIEW
Embedded System Deployment and Management Richard Wasell Applications Engineer, NI Norway Agenda Project Based Deployment Overview FPGA Deployment Image vs. Component Based Updates Push Model MAX & LabVIEW
Real-Time Systems Prof. Dr. Rajib Mall Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur
 Real-Time Systems Prof. Dr. Rajib Mall Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture No. # 26 Real - Time POSIX. (Contd.) Ok Good morning, so let us get
Real-Time Systems Prof. Dr. Rajib Mall Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture No. # 26 Real - Time POSIX. (Contd.) Ok Good morning, so let us get
Computer Network. Interconnected collection of autonomous computers that are able to exchange information
 Introduction Computer Network. Interconnected collection of autonomous computers that are able to exchange information No master/slave relationship between the computers in the network Data Communications.
Introduction Computer Network. Interconnected collection of autonomous computers that are able to exchange information No master/slave relationship between the computers in the network Data Communications.
XtratuM hypervisor redesign for LEON4 multicore processor
 XtratuM hypervisor redesign for LEON4 multicore processor E.Carrascosa, M.Masmano, P.Balbastre and A.Crespo Universidad Politécnica de Valencia, Spain Outline Motivation/Introduction XtratuM hypervisor
XtratuM hypervisor redesign for LEON4 multicore processor E.Carrascosa, M.Masmano, P.Balbastre and A.Crespo Universidad Politécnica de Valencia, Spain Outline Motivation/Introduction XtratuM hypervisor
SOCWIRE: A SPACEWIRE INSPIRED FAULT TOLERANT NETWORK-ON-CHIP FOR RECONFIGURABLE SYSTEM-ON-CHIP DESIGNS
 SOCWIRE: A SPACEWIRE INSPIRED FAULT TOLERANT NETWORK-ON-CHIP FOR RECONFIGURABLE SYSTEM-ON-CHIP DESIGNS IN SPACE APPLICATIONS Session: Networks and Protocols Long Paper B. Osterloh, H. Michalik, B. Fiethe
SOCWIRE: A SPACEWIRE INSPIRED FAULT TOLERANT NETWORK-ON-CHIP FOR RECONFIGURABLE SYSTEM-ON-CHIP DESIGNS IN SPACE APPLICATIONS Session: Networks and Protocols Long Paper B. Osterloh, H. Michalik, B. Fiethe
Datacenter Operating Systems
 Datacenter Operating Systems CSE451 Simon Peter With thanks to Timothy Roscoe (ETH Zurich) Autumn 2015 This Lecture What s a datacenter Why datacenters Types of datacenters Hyperscale datacenters Major
Datacenter Operating Systems CSE451 Simon Peter With thanks to Timothy Roscoe (ETH Zurich) Autumn 2015 This Lecture What s a datacenter Why datacenters Types of datacenters Hyperscale datacenters Major
sel4: from Security to Safety Gernot Heiser, Anna Lyons NICTA and UNSW Australia
 sel4: from Security to Safety Gernot Heiser, Anna Lyons NICTA and UNSW Australia 1 OS Trade-Offs Usability Minix Android Linux Trustworthiness Minix Android L4 sel4 Performance Linux L4 sel4 2015 Gernot
sel4: from Security to Safety Gernot Heiser, Anna Lyons NICTA and UNSW Australia 1 OS Trade-Offs Usability Minix Android Linux Trustworthiness Minix Android L4 sel4 Performance Linux L4 sel4 2015 Gernot
CPU Scheduling Outline
 CPU Scheduling Outline What is scheduling in the OS? What are common scheduling criteria? How to evaluate scheduling algorithms? What are common scheduling algorithms? How is thread scheduling different
CPU Scheduling Outline What is scheduling in the OS? What are common scheduling criteria? How to evaluate scheduling algorithms? What are common scheduling algorithms? How is thread scheduling different
CHAPTER 1: OPERATING SYSTEM FUNDAMENTALS
 CHAPTER 1: OPERATING SYSTEM FUNDAMENTALS What is an operating? A collection of software modules to assist programmers in enhancing efficiency, flexibility, and robustness An Extended Machine from the users
CHAPTER 1: OPERATING SYSTEM FUNDAMENTALS What is an operating? A collection of software modules to assist programmers in enhancing efficiency, flexibility, and robustness An Extended Machine from the users
EECS 750: Advanced Operating Systems. 01/28 /2015 Heechul Yun
 EECS 750: Advanced Operating Systems 01/28 /2015 Heechul Yun 1 Recap: Completely Fair Scheduler(CFS) Each task maintains its virtual time V i = E i 1 w i, where E is executed time, w is a weight Pick the
EECS 750: Advanced Operating Systems 01/28 /2015 Heechul Yun 1 Recap: Completely Fair Scheduler(CFS) Each task maintains its virtual time V i = E i 1 w i, where E is executed time, w is a weight Pick the
Software-Programmable FPGA IoT Platform. Kam Chuen Mak (Lattice Semiconductor) Andrew Canis (LegUp Computing) July 13, 2016
 Andrew Canis (LegUp Computing) July 13, 2016") Software-Programmable FPGA IoT Platform Kam Chuen Mak (Lattice Semiconductor) Andrew Canis (LegUp Computing) July 13, 2016 Agenda Introduction Who we are IoT Platform in FPGA Lattice s IoT Vision IoT Platform
Software-Programmable FPGA IoT Platform Kam Chuen Mak (Lattice Semiconductor) Andrew Canis (LegUp Computing) July 13, 2016 Agenda Introduction Who we are IoT Platform in FPGA Lattice s IoT Vision IoT Platform
urt51: AN EMBEDDED REAL-TIME PROCESSOR IMPLEMENTED ON FPGA DEVICES
 Latin American Applied Research 37:35-4 (27) : AN EMBEDDED REAL-TIME PROCESSOR IMPLEMENTED ON FPGA DEVICES R. CAYSSIALS, M. DUVAL, E. FERRO and O. ALIMENTI Dpto. Ing. Elect., Univ. Nac. del Sur CONICET,
Latin American Applied Research 37:35-4 (27) : AN EMBEDDED REAL-TIME PROCESSOR IMPLEMENTED ON FPGA DEVICES R. CAYSSIALS, M. DUVAL, E. FERRO and O. ALIMENTI Dpto. Ing. Elect., Univ. Nac. del Sur CONICET,
Tasks Schedule Analysis in RTAI/Linux-GPL
 Tasks Schedule Analysis in RTAI/Linux-GPL Claudio Aciti and Nelson Acosta INTIA - Depto de Computación y Sistemas - Facultad de Ciencias Exactas Universidad Nacional del Centro de la Provincia de Buenos
Tasks Schedule Analysis in RTAI/Linux-GPL Claudio Aciti and Nelson Acosta INTIA - Depto de Computación y Sistemas - Facultad de Ciencias Exactas Universidad Nacional del Centro de la Provincia de Buenos
Kernel Types System Calls. Operating Systems. Autumn 2013 CS4023
 Operating Systems Autumn 2013 Outline 1 2 Types of 2.4, SGG The OS Kernel The kernel is the central component of an OS It has complete control over everything that occurs in the system Kernel overview
Operating Systems Autumn 2013 Outline 1 2 Types of 2.4, SGG The OS Kernel The kernel is the central component of an OS It has complete control over everything that occurs in the system Kernel overview
FPGA Implementation of a Hybrid On-line Process Monitoring in PC Based Real-Time Systems*
 SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 8, No. 1, February 2011, 37-51 UDK: 004.383.3 FPGA Implementation of a Hybrid On-line Process Monitoring in PC Based Real-Time Systems* Bojan Jovanović 1,
SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 8, No. 1, February 2011, 37-51 UDK: 004.383.3 FPGA Implementation of a Hybrid On-line Process Monitoring in PC Based Real-Time Systems* Bojan Jovanović 1,
路 論 Chapter 15 System-Level Physical Design
 Introduction to VLSI Circuits and Systems 路 論 Chapter 15 System-Level Physical Design Dept. of Electronic Engineering National Chin-Yi University of Technology Fall 2007 Outline Clocked Flip-flops CMOS
Introduction to VLSI Circuits and Systems 路 論 Chapter 15 System-Level Physical Design Dept. of Electronic Engineering National Chin-Yi University of Technology Fall 2007 Outline Clocked Flip-flops CMOS
KVM in Embedded Requirements, Experiences, Open Challenges
 Corporate Technology KVM in Embedded Requirements, Experiences, Open Challenges Jan Kiszka, Siemens AG Corporate Competence Center Embedded Linux jan.kiszka@siemens.com Copyright Siemens AG 2009. All rights
Corporate Technology KVM in Embedded Requirements, Experiences, Open Challenges Jan Kiszka, Siemens AG Corporate Competence Center Embedded Linux jan.kiszka@siemens.com Copyright Siemens AG 2009. All rights
Xenomai: integration and qualification of a real time operating system ARMadeus Systems
 : integration and qualification of a real time operating system ARMadeus Systems Gwenhaël 8 july 2009 1 / 22 Plan 1 2 3 of in a Buildroot environment 4 5 6 2 / 22 : basics Real time extension for Linux.
: integration and qualification of a real time operating system ARMadeus Systems Gwenhaël 8 july 2009 1 / 22 Plan 1 2 3 of in a Buildroot environment 4 5 6 2 / 22 : basics Real time extension for Linux.
System Software Integration: An Expansive View. Overview
 Software Integration: An Expansive View Steven P. Smith Design of Embedded s EE382V Fall, 2009 EE382 SoC Design Software Integration SPS-1 University of Texas at Austin Overview Some Definitions Introduction:
Software Integration: An Expansive View Steven P. Smith Design of Embedded s EE382V Fall, 2009 EE382 SoC Design Software Integration SPS-1 University of Texas at Austin Overview Some Definitions Introduction:
Eureka Technology. Understanding SD, SDIO and MMC Interface. by Eureka Technology Inc. May 26th, 2011. Copyright (C) All Rights Reserved
 All Rights Reserved") Understanding SD, SDIO and MMC Interface by Eureka Technology Inc. May 26th, 2011 Copyright (C) All Rights Reserved Copyright by Eureka Technology Inc. All Rights Reserved Introduction This white paper
Understanding SD, SDIO and MMC Interface by Eureka Technology Inc. May 26th, 2011 Copyright (C) All Rights Reserved Copyright by Eureka Technology Inc. All Rights Reserved Introduction This white paper
Networking Virtualization Using FPGAs
 Networking Virtualization Using FPGAs Russell Tessier, Deepak Unnikrishnan, Dong Yin, and Lixin Gao Reconfigurable Computing Group Department of Electrical and Computer Engineering University of Massachusetts,
Networking Virtualization Using FPGAs Russell Tessier, Deepak Unnikrishnan, Dong Yin, and Lixin Gao Reconfigurable Computing Group Department of Electrical and Computer Engineering University of Massachusetts,
System Structures. Services Interface Structure
 System Structures Services Interface Structure Operating system services (1) Operating system services (2) Functions that are helpful to the user User interface Command line interpreter Batch interface
System Structures Services Interface Structure Operating system services (1) Operating system services (2) Functions that are helpful to the user User interface Command line interpreter Batch interface
Chapter 19: Real-Time Systems. Overview of Real-Time Systems. Objectives. System Characteristics. Features of Real-Time Systems
 Chapter 19: Real-Time Systems System Characteristics Features of Real-Time Systems Chapter 19: Real-Time Systems Implementing Real-Time Operating Systems Real-Time CPU Scheduling VxWorks 5.x 19.2 Silberschatz,
Chapter 19: Real-Time Systems System Characteristics Features of Real-Time Systems Chapter 19: Real-Time Systems Implementing Real-Time Operating Systems Real-Time CPU Scheduling VxWorks 5.x 19.2 Silberschatz,
Rearchitecting with UML
 Douglas Humphrey Gregory T. Eakman, Ph.D. Version 2.1 June 9, 2004 PathMATE Series Pathfinder Solutions LLC 90 Oak Point Wrentham, MA 02093 USA www.pathfindermda.com 508-384-1392 2004 by Pathfinder Solutions
Douglas Humphrey Gregory T. Eakman, Ph.D. Version 2.1 June 9, 2004 PathMATE Series Pathfinder Solutions LLC 90 Oak Point Wrentham, MA 02093 USA www.pathfindermda.com 508-384-1392 2004 by Pathfinder Solutions
VSched: Mixing Batch And Interactive Virtual Machines Using Periodic Real-time Scheduling
 VSched: Mixing Batch And Interactive Virtual Machines Using Periodic Real-time Scheduling Bin Lin Peter A. Dinda Prescience Lab Department of Electrical Engineering and Computer Science Northwestern University
VSched: Mixing Batch And Interactive Virtual Machines Using Periodic Real-time Scheduling Bin Lin Peter A. Dinda Prescience Lab Department of Electrical Engineering and Computer Science Northwestern University
Fastboot Techniques for x86 Architectures. Marcus Bortel Field Application Engineer QNX Software Systems
 Fastboot Techniques for x86 Architectures Marcus Bortel Field Application Engineer QNX Software Systems Agenda Introduction BIOS and BIOS boot time Fastboot versus BIOS? Fastboot time Customizing the boot
Fastboot Techniques for x86 Architectures Marcus Bortel Field Application Engineer QNX Software Systems Agenda Introduction BIOS and BIOS boot time Fastboot versus BIOS? Fastboot time Customizing the boot
PCI Express IO Virtualization Overview
 Ron Emerick, Oracle Corporation Author: Ron Emerick, Oracle Corporation SNIA Legal Notice The material contained in this tutorial is copyrighted by the SNIA unless otherwise noted. Member companies and
Ron Emerick, Oracle Corporation Author: Ron Emerick, Oracle Corporation SNIA Legal Notice The material contained in this tutorial is copyrighted by the SNIA unless otherwise noted. Member companies and