ZMART Technical Report The International Aerial Robotics Competition 2014
|
|
|
- Buddy Goodwin
- 10 years ago
- Views:
Transcription
1 ZMART Technical Report The International Aerial Robotics Competition 2014 ZJU s Micro-Aerial Robotics Team (ZMART) 1 Zhejiang University, Hangzhou, Zhejiang Province, , P.R.China Abstract The Zhejiang University Micro-Aerial Robotics Team (ZMART) has prepared to participate the 2014 International Aerial Robotics Competition (IARC). Our team aims to demonstrate interaction with one moving object while autonomously navigating in an sterile open environment. The basic system structure consists of a quadrotor helicopter platform, micro processor, control units, different kinds of sensors, communication module, a RC controller and a base station. The hardware structure, as well as the algorithm structure, will be introduced in this report. Keywords: Quadrotor Helicopter, TLD Vision Algorithm, Inertial Measurement Unit based Localization, Potential Field Method 1. Introduction Since the intent of the International Aerial Robotics Competition (IARC) is to encourage new technology development of aerial robotics, Mission 7 tests participants with interaction with moving robots and navigation without external supports. This mission requires the unmanned aerial vehicle (UAV) to herd ground robots to one side of arena, avoid obstacles, keep height within limitation and compete with other aerial vehicles in the second part of the mission. Compared with former missions, Mission 7 diminishes the importance of simultaneous localization and mapping (SLAM), so new method is demanded. The key factors of this mission are moving object tracking, high-speed control and strategy. In our solution, once the moving object is captured correctly by the camera, the velocity of target is equivalent to the UAV s. By calculating the UAV s velocity orientation we can make the decision whether interaction is needed or not. All processes happen in milliseconds and new control signal may come to the actuator before UAV reach stable, so a quick control algorithm is necessary. Since there are multiple targets, target robot should be selected first. After looking on to a specific target, the UAV can process into tracking or interaction operation. Since it is the first time for our team to take part in this type of competition, all work must be done by our groups without any previous experience and hardware setup. Our yearly milestone is to herd one ground robot to the appointed side of arena. By now, we finished 1 Team Leaders: Tao Han, Jiangcheng Zhu (Overall; Flight Control), Members: Tong Qin, Endong Liu (Localization), Haoyu Liu, Quanquan Zhang (Obstacle Avoidance; Communication), Zhongkai Lu, Changchun Ye (Vision), Xingsuo Liu (Height Control;Airframe Design), Zhonglei Wang (System Integration) and Changxu Lou (Airframe Design); Supervisors: Chao Xu, Lei Xie Technical Report of ZJU s Micro-Aerial Robotics Team May 29, 2014

2 building our own UAV system, implementing the vision searching algorithm, the localization method. We anticipate for an attempt in this coming August. 2. Aerial Vehicle A quadrotor, or quadrotor helicopter, is an aircraft that becomes airborne due to the lift force provided by four rotors usually mounted in cross configuration. Quadrotor helicopter has all the blades fixed to the axles, and achieves flight control via collaboration of the propellers. We choose quadrotor helicopter as the flight platform. A quadrotor helicopter has four propellers, which could provide more lift force than a classical helicopter in similar size. Also, as all the axes of the propellers are parallel and fixed, the physical construction is relatively simple and more robust than many other structures. The space within the four propellers is a suitable place to set onboard electronic system on the geometrical center of the quadrotor helicopter. This regular layout reduces the computation complexity of localization and obstacle avoidance. Figure 1: The Quadrotor Platform 2.1. Airframe The airframe is the mechanical structure of an aircraft that supports all the components. Designing an airframe involves important concepts and knowledge of applied mechanics, aerodynamics, materials engineering and manufacturing technologies to achieve a good performance. Fortunately, since the quadrotor has become a popular one in the aero-modeling field, there are many standard components for us to form them up. Concerning the competition background and assigned task, we choose the airframe in Figure 1, which has a raw diameter of 650mm. The airframe is made of carbon fiber and engineering nylon. This kind of airframe compromises weight and mechanical strength quite well. 2

3 As there are many electronic boards and sensors, such as laser scanner and camera, to be installed on the airframe, we use nylon plastic boards and nylon support shores to extend the installation plates Propulsion System The motors we used in this project are electric Direct Current (DC) motors, which are lighter than combustion engines and independent of combustible fuel. Furthermore, brushless DC motors performs more efficiently to be worthy of their cost, when compared to brushed DC motors. To control the speed of a DC brushless motor, Electronic Speed Controller (ESC) must be used. This hardware receives the power supply from the battery and drives it to the motor in a specific phase consequence according to a Pulse-Width Modulation (PWM) signal that is provided by the controller unit. The DC Brushless motor, Electronic Speed Controller and EPP-1245 propeller form the propulsion system. This efficient and dependable combination is all based on the experiences from the attempts of many aero-modeling DIY players. With sufficient power support, this propulsion system could provide lift force of about 3kg in maximum Power System In the aero-modelling market, electric batteries have proven to be a long term cheaper solution compared to combustion engines. Though combustion engine provide far larger lift force and duration time, it is too heavy to such a quadrotor helicopter. A light and robust power source, Lithium Polymer (LiPo) battery, a newly developed power storage technology, is being called as the best choice of quadrotor UAV system for its high capacity. A 5100mAh LiPo battery supports all the electric cost of the UAV system. The 4 ESCs obtain 11.1V electric power directly from its polar. Electronic board and sensors get 5V electric power from the ESC. Four motors work in power of 400W, when hovering. Thus, the regular working time of the quadrotor flight platform is about 10 minutes. 3. Hardware Structure The hardware system includes two parts, the onboard system and the base station. The onboard system consists a Central Control Unit (CCU), a micro processor, an Inertial Measure Unit (IMU), a 2D laser scanner, two cameras, a RC controller and a communication module. The base station is a laptop computer. Those hardware works in two frequencies according to various demands. The control unit, laser scanner, cameras and IMU must work in a comparably high frequency because all events like obstacle avoidance and target tracking can happen at the same time and all functional modules should operate at same high frequency. The communication with base station should also be kept at this high frequency to ensure prompt data visualization. The communication with RC controller, or the safety assurance module works in a relatively low frequency Control System There is only one level of control system on the UAV, the flight control unit. It is in the CCU, the WooKong control board. This unit is responsible for operating the commands from top level. Because of the application of RC controller, between the top level and bottom level there is a autonoumous/manual control switch. The switch can communicate with the the RC 3
 must be used.")
4 Figure 2: The Hardware Structure Diagram controller and when necessary, it can be used to control the UAV manually. This switch is integrated into the CCU. The top level is an onboard micro processor and responds for collecting data from sensors, processing information, generating control command and sending data to base station Inertial Measurement Unit An Inertial Measurement Unit (IMU) is an electronic device that measures the velocity, orientation and gravitational forces of the aerial vehicle simultaneously, using a combination of accelerometers and gyroscopes, sometimes magnetometers. The IMU is the main component of inertial navigation systems used in various aerial vehicles. The 3-axes accelerator and 3-axes gyro are integrated in the WooKong control board. This IMU is relatively light but lower-quality. Another attitude measurement unit is the electronic compass. All data is exacted from IMU module and used for localization. A major disadvantage of using the IMU for navigation is that they typically suffer from accumulated errors. Because of its low quality, we use these lines on arena to validate position. So for localization both of IMU and vision system are used D Laser Scanner A laser scanner is a device which uses a laser beam to determine the distance to an object. By sending a narrow-beam laser pulse, the distance to the object could be computed from the time between the sending and returning of that pulse. Concerning the scan range and weight, the Hokuyo UTM-30LX 2D Laser Scanner is chosen. URM-30LX is a laser sensor for area scanning. The light source of the sensor is infrared laser of wavelength 785nm with laser class 1 safety. Area can be scanned is the sector with maximum radius of 30m and sight of 270 degree. Its gross weight is 270g, far lighter than the commonly used SICK Laser Scanner on ground robots. Hokuyo 2D Laser Scanner could get the obstacles position in polar coordinates. It returns its measurements in an integer array of the size of From 0 to 270 degree, the beam scans 4

5 counter-clockwise at a step of 0.25 degree. The data can be input into the obstacle avoidance module. Besides the application in obstacle avoidance, we can use a little right angle prism to reflect part of the beam onto the ground to measure height. The information of height is used in height control and decision of interaction Vision System In this UAV system, two cameras will be installed onboard, one for forward-sight, another for down-sight. This kind of camera has power supply independent from aircraft main power system, which could support about 1 hour work time in regular. Video taken by cameras will be processed firstly by the top level micro processor. The wireless camera for forward-sight is used in searching mode. After the UAV launches, forward-sight camera searches ground robots and leads the UAV to approach target until the ground robot enter the scope of down-sight camera. The one for down-sight is used to tracking the target robot and keeping the target robot in the center of camera coordinate Communication System and Base Station A wireless communication module is used to transmit data between top level micro processor and base station. This Wi-Fi communication module could guarantee an efficient and dependable data interaction between the onboard system and the base station. According to the amount of data, Wi-Fi method can provide a channel that is fast enough. All algorithms are running on the onboard processor and the only task for base station is data visualization. Through visible data we can check the operation state of UAV. We can transmit to manual control mode instantly when we find the UAV does not function well Safety Assurance According to the safety requirement, we design a autonoumous/manual control switch and integrate it into CCU. It can receive signal from the RC controller. The switch is independent of both top and bottol level processors. Once the RC controller emits particular signal, operator can take over the control of UAV. When there is need for manual control, for example, the UAV can not operating independently, this module can ensure safety. Our operator outside of the arena will follow the UAV so that the UAV is kept within the effective range. 4. Software Structure Briefly, the software structure of the UAV system could be divided into four functional part, localization, tracking, height control and obstacle avoidance. Final result in every loop is the fusion of all modules. Different combination of modules is used in different modes. We develop our software structure in Robot Operation System (ROS). This open source platform provides various packages that can be directly integrated into our system. Though the whole software structure could be divided into four parts clearly, they are not always corresponding to a certain hardware or algorithm. For example, the down-sight camera provides information for position validation and also provide data for object tracking. In this section, algorithms of all modules will be introduced. The structure described below is operated in herding mode. The structure operated in herding mode will be illustrated specifically. 5

6 Figure 3: The Software Structure in Herding Mode 4.1. Mode Determination and Searching Mode There are two mode in our system, herding mode and searching mode. The most important information for mode switching is whether there is ground robot in the visual field of downsight camera. If there is no target in down-sight scope, the system will be kept in searching mode, otherwise in herding mode. In the searching mode, the top priority is to find target and hover over it. Once the target enter the scope of down-sight camera, searching mode is finished and herding mode structure described above will be operated. In the searching mode we use the forward-sight camera to achieve a wide scope. When the target is found, the UAV will approach the ground robot. As long as UAV is close enough, the ground robot will appear in the coordinate of down-sight camera and then herding mode begins Vision TLD is a real-time algorithm for tracking of unknown objects in video streams. It is developed by Zdenek Kalal, a Czechish student in University of Surrey. TLD means tracking, learning and detecting. This method simultaneously tracks the object, learns its appearance and detects it whenever it appears in the video. With this method, the computation system could track almost every moving thing in its visual field [K + 09]. In our system, TLD method is enriched. We try to maintain the ground robot in the center of down-sight camera visual field. TLD method in our system is not only a moving object tracking system but also a controller. This controller output is used to adjust position of UAV and make the UAV follow the target. By making UAV follow the target, we link the velocity of target to the velocity of UAV. These two velocities are equivalent and through localization module the velocity of target can be extracted easily. 6


7 Figure 4: The Software Structure in Searching Mode In the TLD method, Zdenek use an online learning method to get the feature of the target. Regardless of rotation and tilt, it works well. We will add an off-line learning part before the UAV takes off. The UAV will get features about the ground robot. Specially, the forwardsight camera is trained with side-looking images of target while the down-sight camera with down-looking images. By now, we implement this TLD method with OpneCV and C++. We just use its free version to accomplish the mission in this non-profit competition. Figure 5: Using the TLD Method to Track a Chip 4.3. Localization In this mission, a prior map can be built into micro processor, so the pressure for localization is not main concern. Compared with former missions, accuracy requirement is not strict so the computational load is relatively low. The purposes of localization are keeping the UAV remain in the arena and computing the velocity orientation for decision making. 7

8 The foundation of localization algorithm is an odometer. The data from IMU and electronic compass are processed by the odometer. Based on the prior map, the odometer can provide basic position information. However, the quality of odometer is not high enough to provide reliable position and validation should be applied. We use the lines on the arena as landmark to implement validation. Due to the linear feature, simple edge extraction is adequate. Position information is used to prevent the UAV from crossing the boundary. Another application of localization information is to compute the velocity orientation of ground robot. This orientation is the key factor for deciding whether interaction with target is necessary Height Control There are two tasks for height control module. The first one is measuring the height. Since mission 7 has a limitation for flying height, the height control module needs to keep the UAV below the limitation. In our system, height control module will keep the UAV at a certain height. The height will change only when it is necessary to interact with ground target. Another task for height control is to execute the interaction command. When the orientation from localization module is incorrect, which means the target is heading wrong direction, the height control module will make the UAV descend, keep at a low height for completion of interaction, then ascend to normal height again. Here is a challenge for height measure. Since the height from laser scanner is relative height and there is target robot on ground, we need to identify whether the height information is between ground and UAV. We use information down-sight camera as verification. The scanning scope of laser scanner is fixed in down-sight camera, so we could use result from TLD module to determine whether there is a robot in scanning scope. Figure 6: Measure the Height 4.5. Obstacle Avoidance There are already many methods proposed for obstacle avoidance. Artificial potential field approach is a real-time robot path planning method, and is widely used for autonomous mobile robot obstacle avoidance due to its elegant mathematical analysis and simplicity. Combined with the detection data from laser scanner, artificial potential field approach can determine admissible and reachable place for its path planning [Kha85]. Compared with method like dynamic window approach, potential field method is more effective and simple for our task due to there are just 4 robots with tall cylinders obstruct the aerial robot. 8

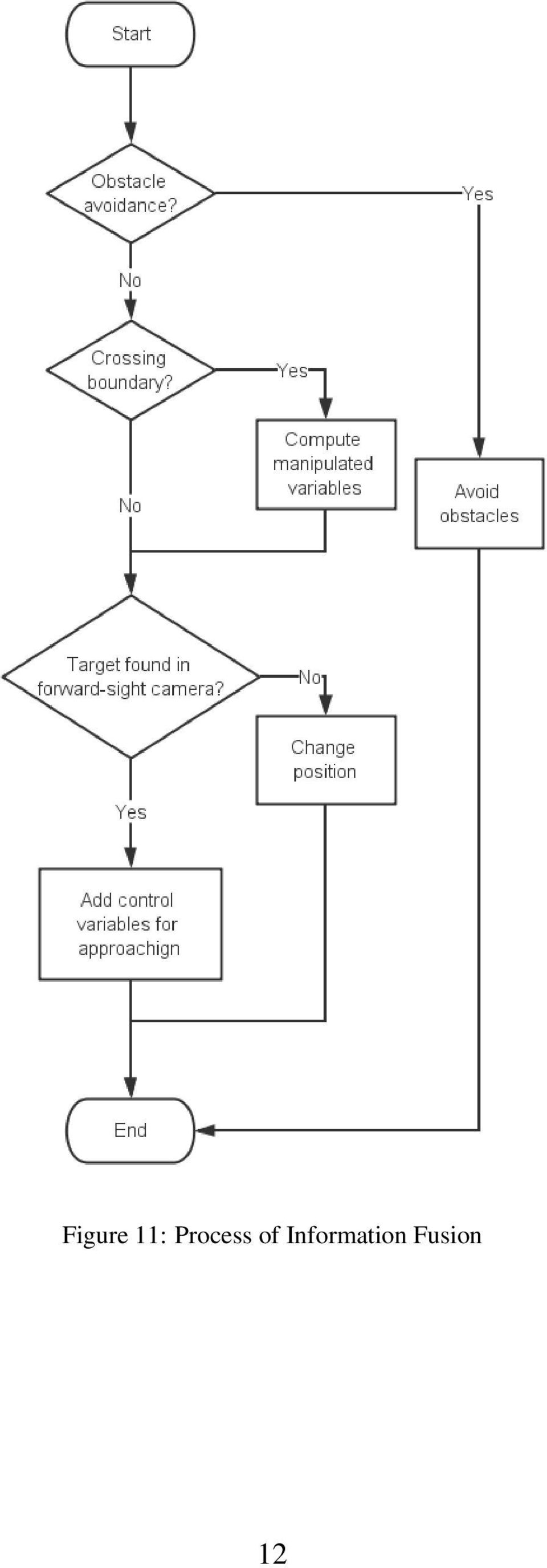
9 Figure 7: Potential Field Method Figure 8: Priority of Events 4.6. Information Fusion All four information will contribute to final result in every loop but the priority of events is different. We design the process of information fusion according to the importance of events. The obstacle avoidance is the top priority. Although flying height is limited in this mission, our UAV only have two kinds of height: high level for normal operation and low level for interaction with ground robot. Thus, we do not need to pay special attention to restrict flying height. Prevent the UAV from crossing the boundary is the secondly most important. Mode determination follows. Then we need to make sure that the ground robot is in the center of camera visual field. At last, the velocity orientation from localization module is applied to determine whether interaction is needed. In searching mode, event in the lowest priority is to approach target in forward-sight camera. Information fusion in every loop can be illustrated as figure 9, 10, Conclusion In this work, we develop an UAV system, based on a quadrotor platform, for the IARC Mission 7. Four main modules, localization, obstacle avoidance, height control and object tracking are implemented in both hardware and software. Although this system is designed 9

10 Figure 9: Process of Information Fusion for one ground robot, the system can be modified for the completed mission after adding strategy module which is used for target selection. Additional test is still needed before the UAV system become robust enough. Acknowledgement We would like to extend our acknowledgement to the Humanoid Robotics Lab in the Institute of Cyber-Systems and Control of Zhejiang University. We appreciate the financial support from the State Key Lab on Industrial Control Technology and Zhejiang University. References [K + 09] Zdenek Kalal et al. Online Learning of Robust Object Detectors during Unstable Tracking. IEEE CS, [Kha85] Oussama Khatib. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. IEEE Robotics and Automation,

11 Figure 10: Subprocess of Information Fusion in Herding Mode 11

12 Figure 11: Process of Information Fusion 12
Onboard electronics of UAVs
 AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
CHAPTER 1 INTRODUCTION
 CHAPTER 1 INTRODUCTION 1.1 Background of the Research Agile and precise maneuverability of helicopters makes them useful for many critical tasks ranging from rescue and law enforcement task to inspection
CHAPTER 1 INTRODUCTION 1.1 Background of the Research Agile and precise maneuverability of helicopters makes them useful for many critical tasks ranging from rescue and law enforcement task to inspection
Control of a quadrotor UAV (slides prepared by M. Cognetti)
") Sapienza Università di Roma Corso di Laurea in Ingegneria Elettronica Corso di Fondamenti di Automatica Control of a quadrotor UAV (slides prepared by M. Cognetti) Unmanned Aerial Vehicles (UAVs) autonomous/semi-autonomous
Sapienza Università di Roma Corso di Laurea in Ingegneria Elettronica Corso di Fondamenti di Automatica Control of a quadrotor UAV (slides prepared by M. Cognetti) Unmanned Aerial Vehicles (UAVs) autonomous/semi-autonomous
Aerospace Information Technology Topics for Internships and Bachelor s and Master s Theses
 Aerospace Information Technology s for Internships and Bachelor s and Master s Theses Version Nov. 2014 The Chair of Aerospace Information Technology addresses several research topics in the area of: Avionic
Aerospace Information Technology s for Internships and Bachelor s and Master s Theses Version Nov. 2014 The Chair of Aerospace Information Technology addresses several research topics in the area of: Avionic
How To Control Gimbal
 Tarot 2-Axis Brushless Gimbal for Gopro User Manual V1.0 1. Introduction Tarot T-2D gimbal is designed for the Gopro Hero3, which is widely used in film, television productions, advertising aerial photography,
Tarot 2-Axis Brushless Gimbal for Gopro User Manual V1.0 1. Introduction Tarot T-2D gimbal is designed for the Gopro Hero3, which is widely used in film, television productions, advertising aerial photography,
Visual Servoing using Fuzzy Controllers on an Unmanned Aerial Vehicle
 Visual Servoing using Fuzzy Controllers on an Unmanned Aerial Vehicle Miguel A. Olivares-Méndez mig [email protected] Pascual Campoy Cervera [email protected] Iván Mondragón [email protected] Carol
Visual Servoing using Fuzzy Controllers on an Unmanned Aerial Vehicle Miguel A. Olivares-Méndez mig [email protected] Pascual Campoy Cervera [email protected] Iván Mondragón [email protected] Carol
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF
 Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter ([email protected]) Abstract In this article an autonomous advertising mobile robot that has been realized in
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter ([email protected]) Abstract In this article an autonomous advertising mobile robot that has been realized in
CONTRIBUTIONS TO THE AUTOMATIC CONTROL OF AERIAL VEHICLES
 1 / 23 CONTRIBUTIONS TO THE AUTOMATIC CONTROL OF AERIAL VEHICLES MINH DUC HUA 1 1 INRIA Sophia Antipolis, AROBAS team I3S-CNRS Sophia Antipolis, CONDOR team Project ANR SCUAV Supervisors: Pascal MORIN,
1 / 23 CONTRIBUTIONS TO THE AUTOMATIC CONTROL OF AERIAL VEHICLES MINH DUC HUA 1 1 INRIA Sophia Antipolis, AROBAS team I3S-CNRS Sophia Antipolis, CONDOR team Project ANR SCUAV Supervisors: Pascal MORIN,
PHANTOM 2 Product Release Notes
 Date : March 3, 2015 PHANTOM 2 Flight Controller Firmware Version : 3.12 March 3, 2015 PHANTOM 2 Flight Controller Firmware V3.12 released Major New Features 1. No-Fly Zones have been updated to include
Date : March 3, 2015 PHANTOM 2 Flight Controller Firmware Version : 3.12 March 3, 2015 PHANTOM 2 Flight Controller Firmware V3.12 released Major New Features 1. No-Fly Zones have been updated to include
sonobot autonomous hydrographic survey vehicle product information guide
 sonobot autonomous hydrographic survey vehicle product information guide EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
sonobot autonomous hydrographic survey vehicle product information guide EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
FRC WPI Robotics Library Overview
 FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
Design Specifications of an UAV for Environmental Monitoring, Safety, Video Surveillance, and Urban Security
 Design Specifications of an UAV for Environmental Monitoring, Safety, Video Surveillance, and Urban Security A. Alessandri, P. Bagnerini, M. Gaggero, M. Ghio, R. Martinelli University of Genoa - Faculty
Design Specifications of an UAV for Environmental Monitoring, Safety, Video Surveillance, and Urban Security A. Alessandri, P. Bagnerini, M. Gaggero, M. Ghio, R. Martinelli University of Genoa - Faculty
SIVAQ. Manufacturing Status Review
 SIVAQ Manufacturing Status Review Project Overview 2 Mission Statement: Augment the capabilities of the Parrot AR Drone 2.0 such that it flies autonomously with a predetermined flight path, records data,
SIVAQ Manufacturing Status Review Project Overview 2 Mission Statement: Augment the capabilities of the Parrot AR Drone 2.0 such that it flies autonomously with a predetermined flight path, records data,
A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA
 A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA N. Zarrinpanjeh a, F. Dadrassjavan b, H. Fattahi c * a Islamic Azad University of Qazvin - [email protected]
A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA N. Zarrinpanjeh a, F. Dadrassjavan b, H. Fattahi c * a Islamic Azad University of Qazvin - [email protected]
Flight Controller. Mini Fun Fly
 Flight Controller Mini Fun Fly Create by AbuseMarK 0 Mini FunFly Flight Controller Naze ( Introduction 6x6mm. 6 grams (no headers, 8 grams with). 000 degrees/second -axis MEMS gyro. auto-level capable
Flight Controller Mini Fun Fly Create by AbuseMarK 0 Mini FunFly Flight Controller Naze ( Introduction 6x6mm. 6 grams (no headers, 8 grams with). 000 degrees/second -axis MEMS gyro. auto-level capable
Hardware In The Loop Simulator in UAV Rapid Development Life Cycle
 Hardware In The Loop Simulator in UAV Rapid Development Life Cycle Widyawardana Adiprawita*, Adang Suwandi Ahmad = and Jaka Semibiring + *School of Electric Engineering and Informatics Institut Teknologi
Hardware In The Loop Simulator in UAV Rapid Development Life Cycle Widyawardana Adiprawita*, Adang Suwandi Ahmad = and Jaka Semibiring + *School of Electric Engineering and Informatics Institut Teknologi
The Design and Implementation of a Quadrotor Flight Controller Using the QUEST Algorithm
 The Design and Implementation of a Quadrotor Flight Controller Using the QUEST Algorithm Jacob Oursland Department of Mathematics and Computer Science South Dakota School of Mines and Technology Rapid
The Design and Implementation of a Quadrotor Flight Controller Using the QUEST Algorithm Jacob Oursland Department of Mathematics and Computer Science South Dakota School of Mines and Technology Rapid
An inertial haptic interface for robotic applications
 An inertial haptic interface for robotic applications Students: Andrea Cirillo Pasquale Cirillo Advisor: Ing. Salvatore Pirozzi Altera Innovate Italy Design Contest 2012 Objective Build a Low Cost Interface
An inertial haptic interface for robotic applications Students: Andrea Cirillo Pasquale Cirillo Advisor: Ing. Salvatore Pirozzi Altera Innovate Italy Design Contest 2012 Objective Build a Low Cost Interface
T1-Fuzzy vs T2-Fuzzy Stabilize Quadrotor Hover with Payload Position Disturbance
 International Journal of Applied Engineering Research ISSN 0973-4562 Volume 9, Number 22 (2014) pp. 17883-17894 Research India Publications http://www.ripublication.com T1-Fuzzy vs T2-Fuzzy Stabilize Quadrotor
International Journal of Applied Engineering Research ISSN 0973-4562 Volume 9, Number 22 (2014) pp. 17883-17894 Research India Publications http://www.ripublication.com T1-Fuzzy vs T2-Fuzzy Stabilize Quadrotor
How To Discuss Unmanned Aircraft System (Uas)
") Unmanned Aerial Systems (UAS) for American Association of Port Authorities Administration and Legal Issues Seminar New Orleans, LA April 9, 2015 Briefly about Flight Guardian Our Services: Educating public
Unmanned Aerial Systems (UAS) for American Association of Port Authorities Administration and Legal Issues Seminar New Orleans, LA April 9, 2015 Briefly about Flight Guardian Our Services: Educating public
Basic Principles of Inertial Navigation. Seminar on inertial navigation systems Tampere University of Technology
 Basic Principles of Inertial Navigation Seminar on inertial navigation systems Tampere University of Technology 1 The five basic forms of navigation Pilotage, which essentially relies on recognizing landmarks
Basic Principles of Inertial Navigation Seminar on inertial navigation systems Tampere University of Technology 1 The five basic forms of navigation Pilotage, which essentially relies on recognizing landmarks
Development of Docking System for Mobile Robots Using Cheap Infrared Sensors
 Development of Docking System for Mobile Robots Using Cheap Infrared Sensors K. H. Kim a, H. D. Choi a, S. Yoon a, K. W. Lee a, H. S. Ryu b, C. K. Woo b, and Y. K. Kwak a, * a Department of Mechanical
Development of Docking System for Mobile Robots Using Cheap Infrared Sensors K. H. Kim a, H. D. Choi a, S. Yoon a, K. W. Lee a, H. S. Ryu b, C. K. Woo b, and Y. K. Kwak a, * a Department of Mechanical
MP2128 3X MicroPilot's. Triple Redundant UAV Autopilot
 MP2128 3X MicroPilot's Triple Redundant UAV Autopilot Triple redundancy (3X) gives autopilot technology the reliability necessary to safely carry out sensitive flight missions and transport valuable payloads.
MP2128 3X MicroPilot's Triple Redundant UAV Autopilot Triple redundancy (3X) gives autopilot technology the reliability necessary to safely carry out sensitive flight missions and transport valuable payloads.
Autonomous Mobile Robot-I
 Autonomous Mobile Robot-I Sabastian, S.E and Ang, M. H. Jr. Department of Mechanical Engineering National University of Singapore 21 Lower Kent Ridge Road, Singapore 119077 ABSTRACT This report illustrates
Autonomous Mobile Robot-I Sabastian, S.E and Ang, M. H. Jr. Department of Mechanical Engineering National University of Singapore 21 Lower Kent Ridge Road, Singapore 119077 ABSTRACT This report illustrates
U g CS for DJI Phantom 2 Vision+, Phantom 3 and Inspire 1
 U g CS for DJI Phantom 2 Vision+, Phantom 3 and Inspire 1 Copyright 2015, Smart Projects Holdings Ltd Contents Preface... 2 Drone connection and first run... 2 Before you begin... 2 First run... 2 Connecting
U g CS for DJI Phantom 2 Vision+, Phantom 3 and Inspire 1 Copyright 2015, Smart Projects Holdings Ltd Contents Preface... 2 Drone connection and first run... 2 Before you begin... 2 First run... 2 Connecting
INSPIRE 1 Release Notes 2015.9.7. Overview: What s New: Bug Fixes: Notice: 1. All-in-One Firmware version updated to: v1.4.0.10
 2015.9.7 1. All-in-One Firmware version updated to: v1.4.0.10 What s New: 1. Added Intelligent Navigation Modes including Point of Interest and Waypoint. 2. A three minute cool down period is triggered
2015.9.7 1. All-in-One Firmware version updated to: v1.4.0.10 What s New: 1. Added Intelligent Navigation Modes including Point of Interest and Waypoint. 2. A three minute cool down period is triggered
Robot Sensors. Outline. The Robot Structure. Robots and Sensors. Henrik I Christensen
 Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 [email protected] Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 [email protected] Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Synthetic Sensing: Proximity / Distance Sensors
 Synthetic Sensing: Proximity / Distance Sensors MediaRobotics Lab, February 2010 Proximity detection is dependent on the object of interest. One size does not fit all For non-contact distance measurement,
Synthetic Sensing: Proximity / Distance Sensors MediaRobotics Lab, February 2010 Proximity detection is dependent on the object of interest. One size does not fit all For non-contact distance measurement,
Engineers from Geodetics select KVH for versatile high-performance inertial sensors. White Paper. kvh.com
 White Paper Overcoming GNSS Vulnerability by Applying Inertial Data Integration in Multi-Sensor Systems for High Accuracy Navigation, Pointing, and Timing Solutions Engineers from Geodetics select KVH
White Paper Overcoming GNSS Vulnerability by Applying Inertial Data Integration in Multi-Sensor Systems for High Accuracy Navigation, Pointing, and Timing Solutions Engineers from Geodetics select KVH
Robot Perception Continued
 Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
2. Dynamics, Control and Trajectory Following
 2. Dynamics, Control and Trajectory Following This module Flying vehicles: how do they work? Quick refresher on aircraft dynamics with reference to the magical flying space potato How I learned to stop
2. Dynamics, Control and Trajectory Following This module Flying vehicles: how do they work? Quick refresher on aircraft dynamics with reference to the magical flying space potato How I learned to stop
Research Methodology Part III: Thesis Proposal. Dr. Tarek A. Tutunji Mechatronics Engineering Department Philadelphia University - Jordan
 Research Methodology Part III: Thesis Proposal Dr. Tarek A. Tutunji Mechatronics Engineering Department Philadelphia University - Jordan Outline Thesis Phases Thesis Proposal Sections Thesis Flow Chart
Research Methodology Part III: Thesis Proposal Dr. Tarek A. Tutunji Mechatronics Engineering Department Philadelphia University - Jordan Outline Thesis Phases Thesis Proposal Sections Thesis Flow Chart
Automated part positioning with the laser tracker
 Automated part positioning with the laser tracker S. Kyle, R. Loser, D. Warren Leica Abstract Improvements and new developments for Leica's laser tracker make it suitable for measuring the relative position
Automated part positioning with the laser tracker S. Kyle, R. Loser, D. Warren Leica Abstract Improvements and new developments for Leica's laser tracker make it suitable for measuring the relative position
IP-S2 Compact+ 3D Mobile Mapping System
 IP-S2 Compact+ 3D Mobile Mapping System 3D scanning of road and roadside features Delivers high density point clouds and 360 spherical imagery High accuracy IMU options without export control Simple Map,
IP-S2 Compact+ 3D Mobile Mapping System 3D scanning of road and roadside features Delivers high density point clouds and 360 spherical imagery High accuracy IMU options without export control Simple Map,
Topology Control and Mobility Strategy for UAV Ad-hoc Networks: A Survey
 Topology Control and Mobility Strategy for UAV Ad-hoc Networks: A Survey Zhongliang Zhao, Torsten Braun Institute of Computer Science and Applied Mathematics, University of Bern Neubrückstrasse 10, 3012
Topology Control and Mobility Strategy for UAV Ad-hoc Networks: A Survey Zhongliang Zhao, Torsten Braun Institute of Computer Science and Applied Mathematics, University of Bern Neubrückstrasse 10, 3012
Author: By Siegfried Krainer and Michael Thomas, Infineon Technologies and Ronald Staerz, MCI Innsbruck
 From toys to tools Author: By Siegfried Krainer and Michael Thomas, Infineon Technologies and Ronald Staerz, MCI Innsbruck Date: 05/04/2016 Categories: Evaluation & Development Kits, Internet of things
From toys to tools Author: By Siegfried Krainer and Michael Thomas, Infineon Technologies and Ronald Staerz, MCI Innsbruck Date: 05/04/2016 Categories: Evaluation & Development Kits, Internet of things
E190Q Lecture 5 Autonomous Robot Navigation
 E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
SIAMA. SIAMA Asset Management Technologies Advanced Inspection Technology
 Prolonging Infrastructure Assets Life Asset Management Technologies Advanced Inspection Technology Smart Infrastructure Asset Management Australia () Research and Development Research & Development company
Prolonging Infrastructure Assets Life Asset Management Technologies Advanced Inspection Technology Smart Infrastructure Asset Management Australia () Research and Development Research & Development company
Frequently Asked Questions
 Frequently Asked Questions Basic Facts What does the name ASIMO stand for? ASIMO stands for Advanced Step in Innovative Mobility. Who created ASIMO? ASIMO was developed by Honda Motor Co., Ltd., a world
Frequently Asked Questions Basic Facts What does the name ASIMO stand for? ASIMO stands for Advanced Step in Innovative Mobility. Who created ASIMO? ASIMO was developed by Honda Motor Co., Ltd., a world
Matthew O. Anderson Scott G. Bauer James R. Hanneman. October 2005 INL/EXT-05-00883
 INL/EXT-05-00883 Unmanned Aerial Vehicle (UAV) Dynamic-Tracking Directional Wireless Antennas for Low Powered Applications That Require Reliable Extended Range Operations in Time Critical Scenarios Matthew
INL/EXT-05-00883 Unmanned Aerial Vehicle (UAV) Dynamic-Tracking Directional Wireless Antennas for Low Powered Applications That Require Reliable Extended Range Operations in Time Critical Scenarios Matthew
AP Series Autopilot System. AP-202 Data Sheet. March,2015. Chengdu Jouav Automation Tech Co.,L.t.d
 AP Series Autopilot System AP-202 Data Sheet March,2015 Chengdu Jouav Automation Tech Co.,L.t.d AP-202 autopilot,from Chengdu Jouav Automation Tech Co., Ltd, provides complete professional-level flight
AP Series Autopilot System AP-202 Data Sheet March,2015 Chengdu Jouav Automation Tech Co.,L.t.d AP-202 autopilot,from Chengdu Jouav Automation Tech Co., Ltd, provides complete professional-level flight
Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors
 Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
Tracking devices. Important features. 6 Degrees of freedom. Mechanical devices. Types. Virtual Reality Technology and Programming
 Tracking devices Virtual Reality Technology and Programming TNM053: Lecture 4: Tracking and I/O devices Referred to head-tracking many times Needed to get good stereo effect with parallax Essential for
Tracking devices Virtual Reality Technology and Programming TNM053: Lecture 4: Tracking and I/O devices Referred to head-tracking many times Needed to get good stereo effect with parallax Essential for
TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS
 TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS BY MARTIN WAGENER APPLICATIONS ENGINEER, TRIMBLE EUROPE OVERVIEW Today s construction industry demands more
TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS BY MARTIN WAGENER APPLICATIONS ENGINEER, TRIMBLE EUROPE OVERVIEW Today s construction industry demands more
Mobile Robot FastSLAM with Xbox Kinect
 Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
REAL TIME TRAFFIC MONITORING SYSTEM AND DRIVER ASSISTANCE
 REAL TIME TRAFFIC MONITORING SYSTEM AND DRIVER ASSISTANCE 1 CHAITHRA M H, 2 KANTHARAJU V, 3 ANIL KUMAR B N 1.2 Assistant Professor, KNSIT, Bangalore 3 Assistant Professor, BRCE, Bangalore E-mail: [email protected],
REAL TIME TRAFFIC MONITORING SYSTEM AND DRIVER ASSISTANCE 1 CHAITHRA M H, 2 KANTHARAJU V, 3 ANIL KUMAR B N 1.2 Assistant Professor, KNSIT, Bangalore 3 Assistant Professor, BRCE, Bangalore E-mail: [email protected],
General Camera Information and use for NuAire Biological Safety Cabinets (BSC) and Isolators
 and Isolators") TECHNICAL BULLETIN : GENERAL INFORMATION General Camera Information and use for NuAire Biological Safety Cabinets (BSC) and Isolators General In today s world, residential, commercial and institutions
TECHNICAL BULLETIN : GENERAL INFORMATION General Camera Information and use for NuAire Biological Safety Cabinets (BSC) and Isolators General In today s world, residential, commercial and institutions
INSPIRE 1 Release Notes 2015.8.4. Overview: What s New: Bug Fixes: 1. All-in-One Firmware version updated to: v1.3.0.00
 2015.8.4 INSPIRE 1 Release Notes 1. All-in-One Firmware version updated to: v1.3.0.00 What s New: 1. Added option to downgrade the aircraft firmware. 2. Added HD Video Conversion option in the video editor.
2015.8.4 INSPIRE 1 Release Notes 1. All-in-One Firmware version updated to: v1.3.0.00 What s New: 1. Added option to downgrade the aircraft firmware. 2. Added HD Video Conversion option in the video editor.
Nighthawk IV UAS. Versatility. User Friendly Design. Capability. Aerial Surveillance Simplified. [email protected] 800.639.6315 www.ara.
 Aerial Surveillance Simplified The Nighthawk IV small unmanned aerial vehicle brings military hardened technology to civil agencies and commercial user groups. Supremely easy to operate and recently certified
Aerial Surveillance Simplified The Nighthawk IV small unmanned aerial vehicle brings military hardened technology to civil agencies and commercial user groups. Supremely easy to operate and recently certified
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
Somero SiteShape System
 Somero SiteShape System www.somero.com [email protected] Somero Enterprises, LLC Corporate Office: 82 Fitzgerald Drive Jaffrey, NH 03452 603 532 5900 - phone 603 532 5930 - fax The Somero SiteShape System
Somero SiteShape System www.somero.com [email protected] Somero Enterprises, LLC Corporate Office: 82 Fitzgerald Drive Jaffrey, NH 03452 603 532 5900 - phone 603 532 5930 - fax The Somero SiteShape System
Mobile robots. Structure of this lecture. Section A: Introduction to AGV: mobile robots. Section B: Design of the ShAPE mobile robot
 slide n. 1 Mobile robots Development of the ShAPE mobile robot Ing. A.Tasora Dipartimento di Ingegneria Industriale Università di Parma, Italy [email protected] slide n. 2 Structure of this lecture Section
slide n. 1 Mobile robots Development of the ShAPE mobile robot Ing. A.Tasora Dipartimento di Ingegneria Industriale Università di Parma, Italy [email protected] slide n. 2 Structure of this lecture Section
Development of Automatic shooting and telemetry system for UAV photogrammetry INTRODUCTION
 Development of Automatic shooting and telemetry system for UAV photogrammetry Jinwoo PARK 1, Minseok KIM 1, Khin Mar Yee 1, Chuluong CHOI 1 1 Department of Spatial Information Engineering, Pukyong National
Development of Automatic shooting and telemetry system for UAV photogrammetry Jinwoo PARK 1, Minseok KIM 1, Khin Mar Yee 1, Chuluong CHOI 1 1 Department of Spatial Information Engineering, Pukyong National
RIEGL VQ-480. Airborne Laser Scanning. Airborne Laser Scanner with Online Waveform Processing. visit our website www.riegl.com
 Airborne Laser Scanner with Online Waveform Processing RIEGL VQ-48 high-accuracy ranging based on echo digitization and online waveform processing high laser repetition rate - fast data acquisition multiple
Airborne Laser Scanner with Online Waveform Processing RIEGL VQ-48 high-accuracy ranging based on echo digitization and online waveform processing high laser repetition rate - fast data acquisition multiple
Tracking of Small Unmanned Aerial Vehicles
 Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: [email protected] Aeronautics and Astronautics Stanford
Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: [email protected] Aeronautics and Astronautics Stanford
WooKong Multi-Rotor User Manual
 WooKong Multi-Rotor User Manual V 3.3 2012.08.23 Revision www.dji-innovations.com 2012 DJI Innovations. All Rights Reserved. Warning & Disclaimer WKM is an excellent autopilot system offering tremendous
WooKong Multi-Rotor User Manual V 3.3 2012.08.23 Revision www.dji-innovations.com 2012 DJI Innovations. All Rights Reserved. Warning & Disclaimer WKM is an excellent autopilot system offering tremendous
Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots
![Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots](/thumbs/27/11692183.jpg "Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots") Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
High Resolution RF Analysis: The Benefits of Lidar Terrain & Clutter Datasets
 0 High Resolution RF Analysis: The Benefits of Lidar Terrain & Clutter Datasets January 15, 2014 Martin Rais 1 High Resolution Terrain & Clutter Datasets: Why Lidar? There are myriad methods, techniques
0 High Resolution RF Analysis: The Benefits of Lidar Terrain & Clutter Datasets January 15, 2014 Martin Rais 1 High Resolution Terrain & Clutter Datasets: Why Lidar? There are myriad methods, techniques
Project Development Plan
 Project Development Plan Roverwerx A.R.M. IRP Santa Clara University Richard Rasay 1 TABLE OF CONTENTS Introduction 1 Software Design.3 Robot-Side Application.5 Client-Side Application.7 Current Status
Project Development Plan Roverwerx A.R.M. IRP Santa Clara University Richard Rasay 1 TABLE OF CONTENTS Introduction 1 Software Design.3 Robot-Side Application.5 Client-Side Application.7 Current Status
Integration Services
 Integration Services EXPERIENCED TEAM ADVANCED TECHNOLOGY PROVEN SOLUTIONS Integrations for large scale metrology applications Metris metrology to streamline your CAPABILITIES Advanced systems design Engineering
Integration Services EXPERIENCED TEAM ADVANCED TECHNOLOGY PROVEN SOLUTIONS Integrations for large scale metrology applications Metris metrology to streamline your CAPABILITIES Advanced systems design Engineering
Sensors Collecting Manufacturing Process Data
 Sensors & Actuators Sensors Collecting Manufacturing Process Data Data must be collected from the manufacturing process Data (commands and instructions) must be communicated to the process Data are of
Sensors & Actuators Sensors Collecting Manufacturing Process Data Data must be collected from the manufacturing process Data (commands and instructions) must be communicated to the process Data are of
Alignment Laser System.
 - O T 6 0 0 0 Alignment Laser System. The OT-6000. Multi -Target,Two Dimensional Alignment. Introducing the most powerful way to measure alignment at distances up to 300 feet. The OT-6000 Alignment Laser
- O T 6 0 0 0 Alignment Laser System. The OT-6000. Multi -Target,Two Dimensional Alignment. Introducing the most powerful way to measure alignment at distances up to 300 feet. The OT-6000 Alignment Laser
MAV Stabilization using Machine Learning and Onboard Sensors
 MAV Stabilization using Machine Learning and Onboard Sensors CS678 Final Report Cooper Bills and Jason Yosinski {csb88,jy495}@cornell.edu December 17, 21 Abstract In many situations, Miniature Aerial Vehicles
MAV Stabilization using Machine Learning and Onboard Sensors CS678 Final Report Cooper Bills and Jason Yosinski {csb88,jy495}@cornell.edu December 17, 21 Abstract In many situations, Miniature Aerial Vehicles
Automated Container Handling in Port Terminals
 Automated Container Handling in Port Terminals Overview. Shipping containers revolutionized the movement of goods, driving change and efficiency throughout the global supply chain. The next revolution
Automated Container Handling in Port Terminals Overview. Shipping containers revolutionized the movement of goods, driving change and efficiency throughout the global supply chain. The next revolution
Automotive Applications of 3D Laser Scanning Introduction
 Automotive Applications of 3D Laser Scanning Kyle Johnston, Ph.D., Metron Systems, Inc. 34935 SE Douglas Street, Suite 110, Snoqualmie, WA 98065 425-396-5577, www.metronsys.com 2002 Metron Systems, Inc
Automotive Applications of 3D Laser Scanning Kyle Johnston, Ph.D., Metron Systems, Inc. 34935 SE Douglas Street, Suite 110, Snoqualmie, WA 98065 425-396-5577, www.metronsys.com 2002 Metron Systems, Inc
Machine Tool Inspection & Analyzer solutions
 Machine Tool Inspection & Analyzer solutions Introduction IBS Precision Engineering machine tool inspection series offers a range of products to provide peace of mind and control to machine operators by
Machine Tool Inspection & Analyzer solutions Introduction IBS Precision Engineering machine tool inspection series offers a range of products to provide peace of mind and control to machine operators by
Microcontrollers, Actuators and Sensors in Mobile Robots
 SISY 2006 4 th Serbian-Hungarian Joint Symposium on Intelligent Systems Microcontrollers, Actuators and Sensors in Mobile Robots István Matijevics Polytechnical Engineering College, Subotica, Serbia [email protected]
SISY 2006 4 th Serbian-Hungarian Joint Symposium on Intelligent Systems Microcontrollers, Actuators and Sensors in Mobile Robots István Matijevics Polytechnical Engineering College, Subotica, Serbia [email protected]
UAVNet: Prototype of a Highly Adaptive and Mobile Wireless Mesh Network using Unmanned Aerial Vehicles (UAVs) Simon Morgenthaler University of Bern
 Simon Morgenthaler University of Bern") UAVNet: Prototype of a Highly Adaptive and Mobile Wireless Mesh Network using Unmanned Aerial Vehicles (UAVs) Simon Morgenthaler University of Bern Dez 19, 2011 Outline Introduction Related Work Mikrokopter
UAVNet: Prototype of a Highly Adaptive and Mobile Wireless Mesh Network using Unmanned Aerial Vehicles (UAVs) Simon Morgenthaler University of Bern Dez 19, 2011 Outline Introduction Related Work Mikrokopter
VTOL UAV. Design of the On-Board Flight Control Electronics of an Unmanned Aerial Vehicle. Árvai László, ZMNE. Tavaszi Szél 2012 ÁRVAI LÁSZLÓ, ZMNE
 Design of the On-Board Flight Control Electronics of an Unmanned Aerial Vehicle Árvai László, ZMNE Contents Fejezet Témakör 1. Features of On-Board Electronics 2. Modularity 3. Functional block schematics,
Design of the On-Board Flight Control Electronics of an Unmanned Aerial Vehicle Árvai László, ZMNE Contents Fejezet Témakör 1. Features of On-Board Electronics 2. Modularity 3. Functional block schematics,
3D SCANNING: A NEW APPROACH TOWARDS MODEL DEVELOPMENT IN ADVANCED MANUFACTURING SYSTEM
 3D SCANNING: A NEW APPROACH TOWARDS MODEL DEVELOPMENT IN ADVANCED MANUFACTURING SYSTEM Dr. Trikal Shivshankar 1, Patil Chinmay 2, Patokar Pradeep 3 Professor, Mechanical Engineering Department, SSGM Engineering
3D SCANNING: A NEW APPROACH TOWARDS MODEL DEVELOPMENT IN ADVANCED MANUFACTURING SYSTEM Dr. Trikal Shivshankar 1, Patil Chinmay 2, Patokar Pradeep 3 Professor, Mechanical Engineering Department, SSGM Engineering
Current Challenges in UAS Research Intelligent Navigation and Sense & Avoid
 Current Challenges in UAS Research Intelligent Navigation and Sense & Avoid Joerg Dittrich Institute of Flight Systems Department of Unmanned Aircraft UAS Research at the German Aerospace Center, Braunschweig
Current Challenges in UAS Research Intelligent Navigation and Sense & Avoid Joerg Dittrich Institute of Flight Systems Department of Unmanned Aircraft UAS Research at the German Aerospace Center, Braunschweig
Assessment Specifications for Remotely Piloted Aircraft Systems, Class 1 AS-RPAS1
 AMC Civil Aviation Authority The Netherlands Assessment Specifications for Remotely Piloted Aircraft Systems, Class 1 AS-RPAS1 Version 1.1 1 December 2014-1 - CONTENTS (general layout) AS RPAS1 REMOTELY
AMC Civil Aviation Authority The Netherlands Assessment Specifications for Remotely Piloted Aircraft Systems, Class 1 AS-RPAS1 Version 1.1 1 December 2014-1 - CONTENTS (general layout) AS RPAS1 REMOTELY
Visual Servoing Methodology for Selective Tree Pruning by Human-Robot Collaborative System
 Ref: C0287 Visual Servoing Methodology for Selective Tree Pruning by Human-Robot Collaborative System Avital Bechar, Victor Bloch, Roee Finkelshtain, Sivan Levi, Aharon Hoffman, Haim Egozi and Ze ev Schmilovitch,
Ref: C0287 Visual Servoing Methodology for Selective Tree Pruning by Human-Robot Collaborative System Avital Bechar, Victor Bloch, Roee Finkelshtain, Sivan Levi, Aharon Hoffman, Haim Egozi and Ze ev Schmilovitch,
Application Note IMU Visualization Software
 ECE 480 Spring 2013 Team 8 Application Note IMU Visualization Software Name: Alex Mazzoni Date: 04/04/2013 Facilitator: Dr. Aviyente Abstract This application note covers how to use open source software
ECE 480 Spring 2013 Team 8 Application Note IMU Visualization Software Name: Alex Mazzoni Date: 04/04/2013 Facilitator: Dr. Aviyente Abstract This application note covers how to use open source software
UAV Pose Estimation using POSIT Algorithm
 International Journal of Digital ontent Technology and its Applications. Volume 5, Number 4, April 211 UAV Pose Estimation using POSIT Algorithm *1 M. He, 2. Ratanasawanya, 3 M. Mehrandezh, 4 R. Paranjape
International Journal of Digital ontent Technology and its Applications. Volume 5, Number 4, April 211 UAV Pose Estimation using POSIT Algorithm *1 M. He, 2. Ratanasawanya, 3 M. Mehrandezh, 4 R. Paranjape
INSTRUCTION MANUAL. Specification: collective pitch 3D quadcopter. TYPE: Collective Pitch Electric 3D Quadcopter. Rotor Diameter: 118MM.
 collective pitch 3D quadcopter INSTRUCTION MANUAL Specification: TYPE: Collective Pitch Electric 3D Quadcopter Rotor Diameter: 118MM Length:635 MM Width: 365 MM Weight: 986g w/out battery Flying weight
collective pitch 3D quadcopter INSTRUCTION MANUAL Specification: TYPE: Collective Pitch Electric 3D Quadcopter Rotor Diameter: 118MM Length:635 MM Width: 365 MM Weight: 986g w/out battery Flying weight
Quadcopter control using Android based sensing
 Quadcopter control using Android based sensing AUGUST BJÄLEMARK Lund University Department of Automatic Control Ole Römers väg 1, SE 223 63, Lund SWEDEN [email protected] HANNES BERGKVIST Lund University
Quadcopter control using Android based sensing AUGUST BJÄLEMARK Lund University Department of Automatic Control Ole Römers väg 1, SE 223 63, Lund SWEDEN [email protected] HANNES BERGKVIST Lund University
AIRCRAFT WORK BREAKDOWN STRUCTURE (WBS) LEVELS (FROM MILITARY SPECIFICATION 881)
 LEVELS (FROM MILITARY SPECIFICATION 881)") Appendix C AIRCRAFT WORK BREAKDOWN STRUCTURE (WBS) LEVELS (FROM MILITARY SPECIFICATION 881) Level 1 Level 2 Level 3 Aircraft System Air Vehicle (AV) System Engineering/ Program Management Airframe Propulsion
Appendix C AIRCRAFT WORK BREAKDOWN STRUCTURE (WBS) LEVELS (FROM MILITARY SPECIFICATION 881) Level 1 Level 2 Level 3 Aircraft System Air Vehicle (AV) System Engineering/ Program Management Airframe Propulsion
Full Waveform Digitizing, Dual Channel Airborne LiDAR Scanning System for Ultra Wide Area Mapping
 Full Waveform Digitizing, Dual Channel Airborne LiDAR Scanning System for Ultra Wide Area Mapping RIEGL LMS-Q56 high laser pulse repetition rate up to 8 khz digitization electronics for full waveform data
Full Waveform Digitizing, Dual Channel Airborne LiDAR Scanning System for Ultra Wide Area Mapping RIEGL LMS-Q56 high laser pulse repetition rate up to 8 khz digitization electronics for full waveform data
Electronic Speed Variator for a Brushless DC Motor
 Electronic Speed Variator for a Brushless DC Motor Jorge M. Jaimes Ponce, Jesús U. Liceaga C., Irma I. Siller A. and Enrique Arévalo Zamudio Abstract In this paper the development of an electronic speed
Electronic Speed Variator for a Brushless DC Motor Jorge M. Jaimes Ponce, Jesús U. Liceaga C., Irma I. Siller A. and Enrique Arévalo Zamudio Abstract In this paper the development of an electronic speed
Research-Grade Research-Grade. Capture
 Research-Grade Research-Grade Motion Motion Capture Capture The System of Choice For Resear systems have earned the reputation as the gold standard for motion capture among research scientists. With unparalleled
Research-Grade Research-Grade Motion Motion Capture Capture The System of Choice For Resear systems have earned the reputation as the gold standard for motion capture among research scientists. With unparalleled
Developing a Sewer Inspection Robot through a Mechatronics Approach
 Developing a Sewer Inspection Robot through a Mechatronics Approach Alireza. Hadi, Gholamhossein. Mohammadi Abstract Sewerage is a harsh environment which requires periodically inspection. The inspection
Developing a Sewer Inspection Robot through a Mechatronics Approach Alireza. Hadi, Gholamhossein. Mohammadi Abstract Sewerage is a harsh environment which requires periodically inspection. The inspection
ZEISS T-SCAN Automated / COMET Automated 3D Digitizing - Laserscanning / Fringe Projection Automated solutions for efficient 3D data capture
 ZEISS T-SCAN Automated / COMET Automated 3D Digitizing - Laserscanning / Fringe Projection Automated solutions for efficient 3D data capture ZEISS 3D Digitizing Automated solutions for efficient 3D data
ZEISS T-SCAN Automated / COMET Automated 3D Digitizing - Laserscanning / Fringe Projection Automated solutions for efficient 3D data capture ZEISS 3D Digitizing Automated solutions for efficient 3D data
GPS Data Collection Procedures for Georeferencing Vegetation Resources Inventory and National Forest Inventory Field Sample Plots
 Province of British Columbia GPS Data Collection Procedures for Georeferencing Vegetation Resources Inventory and National Forest Inventory Field Sample Plots Resources Information Branch Ministry of Sustainable
Province of British Columbia GPS Data Collection Procedures for Georeferencing Vegetation Resources Inventory and National Forest Inventory Field Sample Plots Resources Information Branch Ministry of Sustainable
Servo Info and Centering
 Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
Tube Control Measurement, Sorting Modular System for Glass Tube
 Tube Control Measurement, Sorting Modular System for Glass Tube Tube Control is a modular designed system of settled instruments and modules. It comprises measuring instruments for the tube dimensions,
Tube Control Measurement, Sorting Modular System for Glass Tube Tube Control is a modular designed system of settled instruments and modules. It comprises measuring instruments for the tube dimensions,
RS platforms. Fabio Dell Acqua - Gruppo di Telerilevamento
 RS platforms Platform vs. instrument Sensor Platform Instrument The remote sensor can be ideally represented as an instrument carried by a platform Platforms Remote Sensing: Ground-based air-borne space-borne
RS platforms Platform vs. instrument Sensor Platform Instrument The remote sensor can be ideally represented as an instrument carried by a platform Platforms Remote Sensing: Ground-based air-borne space-borne
CNC Machine Control Unit
 NC Hardware a NC Hardware CNC Machine Control Unit Servo Drive Control Hydraulic Servo Drive Hydraulic power supply unit Servo valve Servo amplifiers Hydraulic motor Hydraulic Servo Valve Hydraulic Servo
NC Hardware a NC Hardware CNC Machine Control Unit Servo Drive Control Hydraulic Servo Drive Hydraulic power supply unit Servo valve Servo amplifiers Hydraulic motor Hydraulic Servo Valve Hydraulic Servo
Development of Knowledge-Based Software for UAV Autopilot Design
 Development of Knowledge-Based Software for UAV Autopilot Design George Tarrant Director CLOSED LOOP SYSTEMS Health Warning Autopilot design is a technical subject. In this paper, I have tried to translate
Development of Knowledge-Based Software for UAV Autopilot Design George Tarrant Director CLOSED LOOP SYSTEMS Health Warning Autopilot design is a technical subject. In this paper, I have tried to translate
RC HELICOPTER INSTRUCTION MANUAL
 AGE 14+ RC HELICOPTER INSTRUCTION MANUAL 1. Smart R/C system 2. Full scale remote control 3. Omnidirectional flight 4. Smooth hover performance 5. Newly designed electricity saving functionality 6. Longer
AGE 14+ RC HELICOPTER INSTRUCTION MANUAL 1. Smart R/C system 2. Full scale remote control 3. Omnidirectional flight 4. Smooth hover performance 5. Newly designed electricity saving functionality 6. Longer
How To Use Trackeye
 Product information Image Systems AB Main office: Ågatan 40, SE-582 22 Linköping Phone +46 13 200 100, fax +46 13 200 150 [email protected], Introduction TrackEye is the world leading system for motion
Product information Image Systems AB Main office: Ågatan 40, SE-582 22 Linköping Phone +46 13 200 100, fax +46 13 200 150 [email protected], Introduction TrackEye is the world leading system for motion
Micro and Mini UAV Airworthiness, European and NATO Activities
 Recent Development in Unmanned Aircraft Systems Micro and Mini UAV Airworthiness, European and NATO Activities iti Fulvia Quagliotti Politecnico di Torino Department of Aerospace Engineering Torino, Italy
Recent Development in Unmanned Aircraft Systems Micro and Mini UAV Airworthiness, European and NATO Activities iti Fulvia Quagliotti Politecnico di Torino Department of Aerospace Engineering Torino, Italy
Control Design of Unmanned Aerial Vehicles (UAVs)
") Control Design of Unmanned Aerial Vehicles (UAVs) Roberto Tempo CNR-IEIIT Consiglio Nazionale delle Ricerche Politecnico di Torino [email protected] Control of UAVs UAVs: Unmanned aerial vehicles of different
Control Design of Unmanned Aerial Vehicles (UAVs) Roberto Tempo CNR-IEIIT Consiglio Nazionale delle Ricerche Politecnico di Torino [email protected] Control of UAVs UAVs: Unmanned aerial vehicles of different
Machine Tool Control. Besides these TNCs, HEIDENHAIN also supplies controls for other areas of application, such as lathes.
 Machine Tool Control Contouring controls for milling, drilling, boring machines and machining centers TNC contouring controls from HEIDENHAIN for milling, drilling, boring machines and machining centers
Machine Tool Control Contouring controls for milling, drilling, boring machines and machining centers TNC contouring controls from HEIDENHAIN for milling, drilling, boring machines and machining centers
Profiling IEEE 802.11 Performance on Linux-based Networked Aerial Robots
 Profiling IEEE 802.11 Performance on Linux-based Networked Aerial Robots Robert Kuschnig 1, Evsen Yanmaz 2, Ingo Kofler 1, Bernhard Rinner 2, and Hermann Hellwagner 1 1 Institute of Information Technology
Profiling IEEE 802.11 Performance on Linux-based Networked Aerial Robots Robert Kuschnig 1, Evsen Yanmaz 2, Ingo Kofler 1, Bernhard Rinner 2, and Hermann Hellwagner 1 1 Institute of Information Technology
T-REDSPEED White paper
 T-REDSPEED White paper Index Index...2 Introduction...3 Specifications...4 Innovation...6 Technology added values...7 Introduction T-REDSPEED is an international patent pending technology for traffic violation
T-REDSPEED White paper Index Index...2 Introduction...3 Specifications...4 Innovation...6 Technology added values...7 Introduction T-REDSPEED is an international patent pending technology for traffic violation
CYCLOPS OSD USER MANUAL 5.0
 CYCLOPS OSD USER MANUAL 5.0 Thank you for choosing CYCLOPS OSD V5.0 New features: CYCLOPS OSD V5.0 is incorporated with Autopilot function and infrared attitude sensor capable of controlling aircraft's
CYCLOPS OSD USER MANUAL 5.0 Thank you for choosing CYCLOPS OSD V5.0 New features: CYCLOPS OSD V5.0 is incorporated with Autopilot function and infrared attitude sensor capable of controlling aircraft's
SpaceLoft XL Sub-Orbital Launch Vehicle
 SpaceLoft XL Sub-Orbital Launch Vehicle The SpaceLoft XL is UP Aerospace s workhorse space launch vehicle -- ideal for significant-size payloads and multiple, simultaneous-customer operations. SpaceLoft
SpaceLoft XL Sub-Orbital Launch Vehicle The SpaceLoft XL is UP Aerospace s workhorse space launch vehicle -- ideal for significant-size payloads and multiple, simultaneous-customer operations. SpaceLoft
E-mail:[email protected] Web site: www.tst-software.com
 E-mail:[email protected] Web site: www.tst-software.com Solutions That Make Sense for Windows 7/XP/2008 and 2003 Server/2000 Multi-DNC v8.0 for Windows 7/XP/2008 and 2003 Server/2000 communications
E-mail:[email protected] Web site: www.tst-software.com Solutions That Make Sense for Windows 7/XP/2008 and 2003 Server/2000 Multi-DNC v8.0 for Windows 7/XP/2008 and 2003 Server/2000 communications