PROJECT PRESENTATION ON CELLPHONE OPERATED ROBOTIC ASSISTANT
|
|
|
- Sheila Washington
- 10 years ago
- Views:
Transcription
1 PROJECT PRESENTATION ON CELLPHONE OPERATED ROBOTIC ASSISTANT ELECTRONICS ENGINEERING DEPARTMENT SVNIT, SURAT , INDIA

2 Prepared by: Anurag Gupta (U05EC401) Dhrumeel Bakshi (U05EC326) Dileep Dhakal (U05EC388) Jaidatt Sharma (U05EC338) Kankan Ghosh (U05EC340) Guided by: Mr. Abhilash Mandloi (Guide) Mr. N.B. Kanirkar (Co-Guide)
 Mr. N.B.")
3 1. INTRODUCTION
4 OVERVIEW AND DESIGN STEPS Aim of the project is to use a mobile phone to control a robotic arm mounted on a land rover. Provides robust control, large working range and upto 12 controls. Control of robot involves 3 different phases:1. Perception 2. Processing 3. Action

5 1. PRECEPTION First part is the decoding of DTMF tone generated by pressing a key in calling phone. Audio signal output from receiving phone is fed to DTMF decoder chip. Decoder chip converts DTMF tone into binary codes to be fed to microcontroller. CM8870 IC used as DTMF decoder in our project

6 2. PROCESSING After preception stage, microcontroller processes the binary codes it receives. Microcontroller is pre-programmed in C to perform specific task according to input bits. Atmel s ATmega16 is used for processing. Program is written using AVR Studio and uploaded using SuperPro.

7 3. ACTION Final stage is rotation of motors based on input given by the microcontroller. Two DC motors of 30 rpm are used for the land rover and three servo motors of Futaba S3003 are used for robotic arm DC motors are driven by motor driver IC L293D. Servo motors are driven by PWM generated by the microcontroller.

8 BASIC BLOCK DIAGRAM OF PROJECT

9 2. DTMF SIGNALS AND DTMF DECODING CIRCUIT

10 DTMF Dual Tone Multiple-Frequency. Signals generated by the superposition of two pure sinusoidal tones. Commonly used for telephone signalling over the line in the voice-frequency band, to the call switching center. Developed as a very reliable alternative to pulsedialing.

11 DTMF represents numbers/digits as voice signals.

12 The 12-keys numeric pad. 0 to 9 keys * and # keys DTMF assigns a unique sound to each key Keys are arranged in a matrix of 3 columns and 4 rows.

13 Grouping of Frequencies The DTMF signal generated is the sum of two sinusoidal tones.

14 Tone frequencies, are defined by the Precise Tone Plan. Harmonics and intermodulation products will not cause an unreliable signal No frequency is a multiple of another. No frequency is the sum or difference of 2 other frequencies.

15 Communication Overview

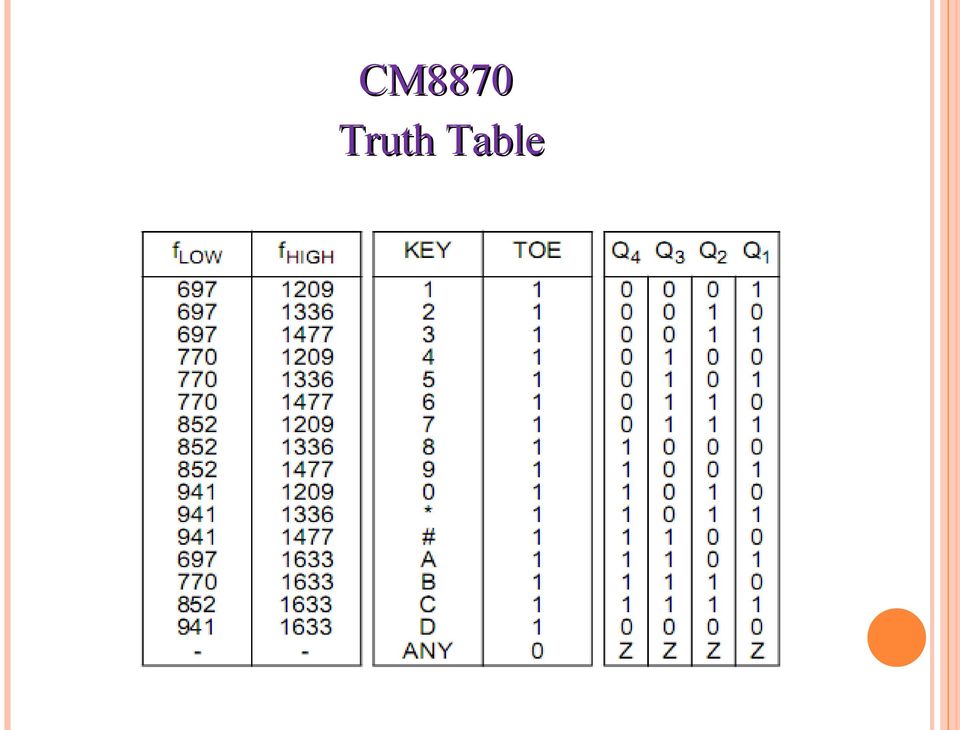
16 CM8870 CM8870 is a very commonly used chip for DTMF decoding. It is a state of the art single chip DTMF receiver incorporating switched capacitor filter technology and an advanced digital counting/averaging algorithm for period measurement.


17 CM8870 Truth Table
18 Limitation on number of function codes 12 DTMF tones are available to us (using a common touch-tone phone). Number of functions may be extended to 144 by programming the microcontroller to accept two codes instead of one. Two key presses will be required from the control mobile phone.

19 Advantages of using the DTMF communication scheme Working range is as large as the coverage area. Problems due to Harmonics and their interference are eliminated. Only one tone per group is allowed. This eliminates reception of erroneous codes. DTMF tones if received from external sources, are neglected by amplitude comparison of the two tones. Simple usage, and short numeric codes for control.

20 DECODER CIRCUIT USED IN PROJECT

21 3. ATMEGA16 MICROCONTROLLER
22 ATMEGA16 FEATURES & ARCHITECTURE Advanced-RISC architecture. 16K bytes of In-System Programmable Flash Program memory. Three timers/counters with compare modes. Internal and external interrupts. 4 PWM channels. 8 channnel 10-bit ADC. 32 general-purpose registers. High-performance, Low-power AVR 8-bit Microcontroller.
23 Q. WHY USE ATMEL S ATMEGA16? Widely used. Easily available. Cost effective. Speed of execution of instructions. Flexible instruction set. Vast documentation. Easily available support and development tools.
24 PROGRAMMING & DEVELOPMENT TOOLS Very popular compilers and uploaders available. Easy compliancy with C, BASIC, PASCAL, C++, FORTRAN,etc WinAVR, AVR Studio, AVRTools, AVRDude, AVR Dragon, SuperPro (by Xeltek) etc. Development kits are cheap and easily available.
25 INTERFACING CIRCUIT USED IN PROJECT
26 4. SERVO AND DC MOTOR CONTROL
27 SERVO MOTOR CONTROL USING PWM SIGNALS A servo consists of a dc motor, gear train, potentiometer, and some control circuitry all mounted compactly in a case. Shaft rotation at relatively slow speeds. Easily controlled by a microcontroller. 3 wires: white, red, and black
28 White - control signal, red - power (usually 4.8 V to 6 V), black - ground. The control circuitry inside the servo must receive a stream of pulses whose widths may vary between about 1 and 2 ms. A potentiometer coupled to the rotation of the output shaft produces a voltage corresponding to the angle of the shaft. The control circuitry compares the average voltage of the control signal with the voltage from the potentiometer, and the shaft rotates until the two voltages are the same.
29 DIFFERENT PWM INPUTS
30 SERVO MECHANISM - BLOCK DIAGRAM
31 GENERATION OF PWM SIGNALS USING ATMEGA16 Timers Timer/Counter 0 8 bit Timer/Counter 1 16 bit Timer/Counter 2 8 bit Pulse generation and variation
32 TIMER REGISTERS TCNTn : Timer/counter register OCRn: Output Compare Register TIFR : Timer Interrupt Flag register TIMSK : Timer Interrupt Mask register ICR1 : Input Capture register
33 MODES OF OPERATION Normal Mode: Simplest mode. Count sequence always up. Clear Timer on Compare Match (CTC) Mode
34 Phase Correct PWM Mode Dual slope operation. Output compare set in one direction, cleared in other.
35 Fast PWM Mode Single slope operation Easy to code. Maximum frequency twice as high as Phase correct PWM mode.
36 CONTROL WORD FORMATS AND REGISTER VALUES FOR FAST PWM MODE Timer/Counter 0 Control Register Bit 7 FOC0: Force Output Compare Bit 6, 3 WGM01:0: Waveform Generation Mode Bit 5:4 COM01:0: Compare Match Output Mode Bit 2:0 CS02:0: Clock Select
37 TIMER 1 FOR PWM Advantages: o Higher resolution o 2 PWM channels OC1A, OC1B o TOP value can be set using ICR1
38 Timer/Counter1 Control Register A TCCR1A Timer/Counter1 Control Register B TCCR1B
39 DC MOTOR CONTROLLER: L293D Microcontroller output is not sufficient to drive DC motors so L293D is used. L293D comes in 16-pin DIP. It can provide currents upto 600mA at voltages from 4.5V to 36V. It can be used to drive inductive loads such as relays, solenoids etc and bipolar stepper motors. In the project it is used for simultaneous bi-directional control of two DC motors.

40 DC MOTOR CONTROL
41 L293D CIRCUIT USED IN PROJECT
42 5. FINAL CIRCUIT SCHEMATIC, CODE AND EXPERIMENTAL RESULTS
43 SOFTWARES USED FOR PROGRAMMING AND SIMULATIONS AVR Studio for programming the Atmega16 microcontroller and generating the HEX files. SuperPro USB Series for burning the internal flash memory of ATmega 16 using SuperPro 280U hardware. Proteus ISIS for designing and simulating the circuit. Circuit layout generation using Proteus Ares.
44 AVR STUDIO FOR ATMEGA 16 PROGRAMMING Program can be written in both C and assembly language. Flags, Timers, Ports and Register bank can be observed directly. Hex files can be generated. Easy debugging and troubleshooting.
45 WRITING CODE ON AVR STUDIO
46 SUPERPRO USB SERIES Freely available software to write the HEX file to the microcontroller. Uses SUPERPRO Model 280U as the burner. Device support large number of Microcontrollers, EEPROMs, microprocessors, PROMs. Microcontrollers can be tested and data can be verified. Data can be erased in seconds. USB supported.
47 UPLOADING PROGRAM USING SUPERPRO
48 CIRCUIT SIMULATION Cost and time saving. Signal generation and observation Circuit Optimization for the best performance. Program codes can be tested in the virtual microcontroller. Simulation result is an ideal performance parameters. Fault detection and correction. Hex files generated by AVR can be virtually tested in the Proteus ISIS simulator.

49 FINAL CIRCUIT SCHEMATIC
50 PROTEUS-ISIS FEATURES Supports large number of Microcontroller Units (MCUs) including ATmega 16. Generating the proper signals for motor controller. Huge gallery of circuit components. Electromechanical components like Servo and DC motors can be simulated. Circuit can be transformed to design a Layout in Proteus Ares software. Hex file can be loaded directly to the MCU and observe the result. Logic analyzer facility.
51 CIRCUIT SIMULATION ON ISIS
52 CIRCUIT SIMULATION ON ISIS (CONTD.)
53 PROTEUS ARES FOR PCB LAYOUT DESIGN Auto routing and placing facility of optimization of the circuit. Custom design facility for implementation of any type of IC (both QFP or DIP package). Circuit designed in Proteus ISIS can be directly transformed to PCB layout design. 3D visualization facility for multi-axis design optimization.
54 LAYOUT ON PROTEUS ARES
55 Thank you!
A 5 Degree Feedback Control Robotic Arm (Haptic Arm)
") A 5 Degree Feedback Control Robotic Arm (Haptic Arm) 1 Prof. Sheetal Nirve, 2 Mr.Abhilash Patil, 3 Mr.Shailesh Patil, 4 Mr.Vishal Raut Abstract: Haptics is the science of applying touch sensation and control
A 5 Degree Feedback Control Robotic Arm (Haptic Arm) 1 Prof. Sheetal Nirve, 2 Mr.Abhilash Patil, 3 Mr.Shailesh Patil, 4 Mr.Vishal Raut Abstract: Haptics is the science of applying touch sensation and control
AVR Timer/Counter. Prof Prabhat Ranjan DA-IICT, Gandhinagar
 AVR Timer/Counter Prof Prabhat Ranjan DA-IICT, Gandhinagar 8-bit Timer/Counter0 with PWM Single Compare Unit Counter Clear Timer on Compare Match (Auto Reload) Glitch-free, Phase Correct Pulse Width Modulator
AVR Timer/Counter Prof Prabhat Ranjan DA-IICT, Gandhinagar 8-bit Timer/Counter0 with PWM Single Compare Unit Counter Clear Timer on Compare Match (Auto Reload) Glitch-free, Phase Correct Pulse Width Modulator
Mobile Operated Landrover Using Dtmf Decoder
 Vol.3, Issue.2, March-April. 2013 pp-898-902 ISSN: 2249-6645 K.Aruna, 1 A.Sri Ramsagar, 2 G.Venkateswarlu 3 Department of Electronics and Communication Engineering, Bapatla Engineering College, Bapatla,
Vol.3, Issue.2, March-April. 2013 pp-898-902 ISSN: 2249-6645 K.Aruna, 1 A.Sri Ramsagar, 2 G.Venkateswarlu 3 Department of Electronics and Communication Engineering, Bapatla Engineering College, Bapatla,
Tutorial. replace them with cell-phone operated module. The advantages of a cell-phone operated bot are:-
 Tutorial Overview: The basic aim of the project is to find an alternative to the usual RF circuits that are seen so frequently and replace them with cell-phone operated module. The advantages of a cell-phone
Tutorial Overview: The basic aim of the project is to find an alternative to the usual RF circuits that are seen so frequently and replace them with cell-phone operated module. The advantages of a cell-phone
Cell Phone Operated Land Rover
 Cell Phone Operated Land Rover Sumona Biswas, Bipin Kumar, Aditya kushwaha, Debasish Sardar Department of Electronics and Communication Engineering, Birbhum Institute of Engineering& Technology, Suri(west
Cell Phone Operated Land Rover Sumona Biswas, Bipin Kumar, Aditya kushwaha, Debasish Sardar Department of Electronics and Communication Engineering, Birbhum Institute of Engineering& Technology, Suri(west
PWM IN AVR. Developed by: Krishna Nand Gupta Prashant Agrawal Mayur Agarwal
 PWM IN AVR Developed by: Krishna Nand Gupta Prashant Agrawal Mayur Agarwal PWM (pulse width Modulation) What is PWM? Frequency = (1/T) Duty Cycle = (Thigh/T) What is need of PWM? I answer this in respect
PWM IN AVR Developed by: Krishna Nand Gupta Prashant Agrawal Mayur Agarwal PWM (pulse width Modulation) What is PWM? Frequency = (1/T) Duty Cycle = (Thigh/T) What is need of PWM? I answer this in respect
Pulse Width Modulation Applications
 Pulse Width Modulation Applications Lecture 21 EE 383 Microcomputers Learning Objectives What is DTMF? How to use PWM to generate DTMF? How to use PWM to control a servo motor? How to use PWM to control
Pulse Width Modulation Applications Lecture 21 EE 383 Microcomputers Learning Objectives What is DTMF? How to use PWM to generate DTMF? How to use PWM to control a servo motor? How to use PWM to control
Servo Info and Centering
 Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
2.0 Command and Data Handling Subsystem
 2.0 Command and Data Handling Subsystem The Command and Data Handling Subsystem is the brain of the whole autonomous CubeSat. The C&DH system consists of an Onboard Computer, OBC, which controls the operation
2.0 Command and Data Handling Subsystem The Command and Data Handling Subsystem is the brain of the whole autonomous CubeSat. The C&DH system consists of an Onboard Computer, OBC, which controls the operation
The Programming Interface
 : In-System Programming Features Program any AVR MCU In-System Reprogram both data Flash and parameter EEPROM memories Eliminate sockets Simple -wire SPI programming interface Introduction In-System programming
: In-System Programming Features Program any AVR MCU In-System Reprogram both data Flash and parameter EEPROM memories Eliminate sockets Simple -wire SPI programming interface Introduction In-System programming
DESIGN OF 6 DOF ROBOTIC ARM CONTROLLED OVER THE INTERNET
 DESIGN OF 6 DOF ROBOTIC ARM CONTROLLED OVER THE INTERNET G. Rajiv and Sivakumar Sathyabama University, Chennai, India E-Mail: [email protected] ABSTRACT The purpose of the project is to build a robotic
DESIGN OF 6 DOF ROBOTIC ARM CONTROLLED OVER THE INTERNET G. Rajiv and Sivakumar Sathyabama University, Chennai, India E-Mail: [email protected] ABSTRACT The purpose of the project is to build a robotic
Controlling a Dot Matrix LED Display with a Microcontroller
 Controlling a Dot Matrix LED Display with a Microcontroller By Matt Stabile and programming will be explained in general terms as well to allow for adaptation to any comparable microcontroller or LED matrix.
Controlling a Dot Matrix LED Display with a Microcontroller By Matt Stabile and programming will be explained in general terms as well to allow for adaptation to any comparable microcontroller or LED matrix.
Welcome to the tutorial for the MPLAB Starter Kit for dspic DSCs
 Welcome to the tutorial for the MPLAB Starter Kit for dspic DSCs Welcome to this tutorial on Microchip s MPLAB Starter Kit for dspic Digital Signal Controllers, or DSCs. The starter kit is an all-in-one
Welcome to the tutorial for the MPLAB Starter Kit for dspic DSCs Welcome to this tutorial on Microchip s MPLAB Starter Kit for dspic Digital Signal Controllers, or DSCs. The starter kit is an all-in-one
Embedded Systems on ARM Cortex-M3 (4weeks/45hrs)
") Embedded Systems on ARM Cortex-M3 (4weeks/45hrs) Course & Kit Contents LEARN HOW TO: Use of Keil Real View for ARM Use ARM Cortex-M3 MCU for professional embedded application development Understanding
Embedded Systems on ARM Cortex-M3 (4weeks/45hrs) Course & Kit Contents LEARN HOW TO: Use of Keil Real View for ARM Use ARM Cortex-M3 MCU for professional embedded application development Understanding
Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill
 Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill Objectives: Analyze the operation of sequential logic circuits. Understand the operation of digital counters.
Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill Objectives: Analyze the operation of sequential logic circuits. Understand the operation of digital counters.
MANUAL FOR RX700 LR and NR
 MANUAL FOR RX700 LR and NR 2013, November 11 Revision/ updates Date, updates, and person Revision 1.2 03-12-2013, By Patrick M Affected pages, ETC ALL Content Revision/ updates... 1 Preface... 2 Technical
MANUAL FOR RX700 LR and NR 2013, November 11 Revision/ updates Date, updates, and person Revision 1.2 03-12-2013, By Patrick M Affected pages, ETC ALL Content Revision/ updates... 1 Preface... 2 Technical
8051 MICROCONTROLLER COURSE
 8051 MICROCONTROLLER COURSE Objective: 1. Familiarization with different types of Microcontroller 2. To know 8051 microcontroller in detail 3. Programming and Interfacing 8051 microcontroller Prerequisites:
8051 MICROCONTROLLER COURSE Objective: 1. Familiarization with different types of Microcontroller 2. To know 8051 microcontroller in detail 3. Programming and Interfacing 8051 microcontroller Prerequisites:
ET-BASE AVR ATmega64/128
 ET-BASE AVR ATmega64/128 ET-BASE AVR ATmega64/128 which is a Board Microcontroller AVR family from ATMEL uses MCU No.ATmega64 and ATmega128 64PIN. Board ET-BASE AVR ATmega64/128 uses MCU s resources on
ET-BASE AVR ATmega64/128 ET-BASE AVR ATmega64/128 which is a Board Microcontroller AVR family from ATMEL uses MCU No.ATmega64 and ATmega128 64PIN. Board ET-BASE AVR ATmega64/128 uses MCU s resources on
Microtronics technologies Mobile: 99707 90092
 For more Project details visit: http://www.projectsof8051.com/rfid-based-attendance-management-system/ Code Project Title 1500 RFid Based Attendance System Synopsis for RFid Based Attendance System 1.
For more Project details visit: http://www.projectsof8051.com/rfid-based-attendance-management-system/ Code Project Title 1500 RFid Based Attendance System Synopsis for RFid Based Attendance System 1.
Atmel Norway 2005. XMEGA Introduction
 Atmel Norway 005 XMEGA Introduction XMEGA XMEGA targets Leadership on Peripheral Performance Leadership in Low Power Consumption Extending AVR market reach XMEGA AVR family 44-100 pin packages 16K 51K
Atmel Norway 005 XMEGA Introduction XMEGA XMEGA targets Leadership on Peripheral Performance Leadership in Low Power Consumption Extending AVR market reach XMEGA AVR family 44-100 pin packages 16K 51K
RAM & ROM Based Digital Design. ECE 152A Winter 2012
 RAM & ROM Based Digital Design ECE 152A Winter 212 Reading Assignment Brown and Vranesic 1 Digital System Design 1.1 Building Block Circuits 1.1.3 Static Random Access Memory (SRAM) 1.1.4 SRAM Blocks in
RAM & ROM Based Digital Design ECE 152A Winter 212 Reading Assignment Brown and Vranesic 1 Digital System Design 1.1 Building Block Circuits 1.1.3 Static Random Access Memory (SRAM) 1.1.4 SRAM Blocks in
INTRODUCTION TO SERIAL ARM
 INTRODUCTION TO SERIAL ARM A robot manipulator consists of links connected by joints. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of
INTRODUCTION TO SERIAL ARM A robot manipulator consists of links connected by joints. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of
Voice Dialer Speech Recognition Dialing IC
 Speech Recognition Dialing IC Speaker Dependent IC for Voice Dialing Applications GENERAL DESCRIPTION The IC, from the Interactive Speech family of products, is an application specific standard product
Speech Recognition Dialing IC Speaker Dependent IC for Voice Dialing Applications GENERAL DESCRIPTION The IC, from the Interactive Speech family of products, is an application specific standard product
Micro-Step Driving for Stepper Motors: A Case Study
 Micro-Step Driving for Stepper Motors: A Case Study N. Sedaghati-Mokhtari Graduate Student, School of ECE, University of Tehran, Tehran, Iran n.sedaghati @ece.ut.ac.ir Abstract: In this paper, a case study
Micro-Step Driving for Stepper Motors: A Case Study N. Sedaghati-Mokhtari Graduate Student, School of ECE, University of Tehran, Tehran, Iran n.sedaghati @ece.ut.ac.ir Abstract: In this paper, a case study
Design of a GSM Cell Phone based Vehicle Monitoring & Theft Security System
 Design of a GSM Cell Phone based Vehicle Monitoring & Theft Security System Amol S. Dhotre, Abhishek S. Chandurkar & S. S. Jadhav Dept. of Electronics Engineering, Govidrao Wanjari College of Engineering,
Design of a GSM Cell Phone based Vehicle Monitoring & Theft Security System Amol S. Dhotre, Abhishek S. Chandurkar & S. S. Jadhav Dept. of Electronics Engineering, Govidrao Wanjari College of Engineering,
Data Sheet. Adaptive Design ltd. Arduino Dual L6470 Stepper Motor Shield V1.0. 20 th November 2012. L6470 Stepper Motor Shield
 Arduino Dual L6470 Stepper Motor Shield Data Sheet Adaptive Design ltd V1.0 20 th November 2012 Adaptive Design ltd. Page 1 General Description The Arduino stepper motor shield is based on L6470 microstepping
Arduino Dual L6470 Stepper Motor Shield Data Sheet Adaptive Design ltd V1.0 20 th November 2012 Adaptive Design ltd. Page 1 General Description The Arduino stepper motor shield is based on L6470 microstepping
Access Control Using Smartcard And Passcode
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676 Volume 4, Issue 5 (Jan. - Feb. 2013), PP 29-34 Access Control Using Smartcard And Passcode Omorogiuwa Eseosa 1., Uhunmwangho
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676 Volume 4, Issue 5 (Jan. - Feb. 2013), PP 29-34 Access Control Using Smartcard And Passcode Omorogiuwa Eseosa 1., Uhunmwangho
STEPPER MOTOR SPEED AND POSITION CONTROL
 STEPPER MOTOR SPEED AND POSITION CONTROL Group 8: Subash Anigandla Hemanth Rachakonda Bala Subramanyam Yannam Sri Divya Krovvidi Instructor: Dr. Jens - Peter Kaps ECE 511 Microprocessors Fall Semester
STEPPER MOTOR SPEED AND POSITION CONTROL Group 8: Subash Anigandla Hemanth Rachakonda Bala Subramanyam Yannam Sri Divya Krovvidi Instructor: Dr. Jens - Peter Kaps ECE 511 Microprocessors Fall Semester
Display Message on Notice Board using GSM
 Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 7 (2013), pp. 827-832 Research India Publications http://www.ripublication.com/aeee.htm Display Message on Notice Board
Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 7 (2013), pp. 827-832 Research India Publications http://www.ripublication.com/aeee.htm Display Message on Notice Board
Ocean Controls RC Servo Motor Controller
 Ocean Controls RC Servo Motor Controller RC Servo Motors: RC Servo motors are used in radio-controlled model cars and planes, robotics, special effects, test equipment and industrial automation. At the
Ocean Controls RC Servo Motor Controller RC Servo Motors: RC Servo motors are used in radio-controlled model cars and planes, robotics, special effects, test equipment and industrial automation. At the
Harmonics and Noise in Photovoltaic (PV) Inverter and the Mitigation Strategies
 Inverter and the Mitigation Strategies") Soonwook Hong, Ph. D. Michael Zuercher Martinson Harmonics and Noise in Photovoltaic (PV) Inverter and the Mitigation Strategies 1. Introduction PV inverters use semiconductor devices to transform the
Soonwook Hong, Ph. D. Michael Zuercher Martinson Harmonics and Noise in Photovoltaic (PV) Inverter and the Mitigation Strategies 1. Introduction PV inverters use semiconductor devices to transform the
DEVELOPMENT OF DEVICES AND METHODS FOR PHASE AND AC LINEARITY MEASUREMENTS IN DIGITIZERS
 DEVELOPMENT OF DEVICES AND METHODS FOR PHASE AND AC LINEARITY MEASUREMENTS IN DIGITIZERS U. Pogliano, B. Trinchera, G.C. Bosco and D. Serazio INRIM Istituto Nazionale di Ricerca Metrologica Torino (Italia)
DEVELOPMENT OF DEVICES AND METHODS FOR PHASE AND AC LINEARITY MEASUREMENTS IN DIGITIZERS U. Pogliano, B. Trinchera, G.C. Bosco and D. Serazio INRIM Istituto Nazionale di Ricerca Metrologica Torino (Italia)
Feasibility Study of Implementation of Cell Phone Controlled, Password Protected Door Locking System
 Feasibility Study of Implementation of Cell Phone Controlled, Password Protected Door Locking System Ashish Jadhav 1, Mahesh Kumbhar 2, Mahesh Walunjkar 3 Lecturer, Dept. of Electronics and Telecommunication,
Feasibility Study of Implementation of Cell Phone Controlled, Password Protected Door Locking System Ashish Jadhav 1, Mahesh Kumbhar 2, Mahesh Walunjkar 3 Lecturer, Dept. of Electronics and Telecommunication,
A Digital Timer Implementation using 7 Segment Displays
 A Digital Timer Implementation using 7 Segment Displays Group Members: Tiffany Sham u2548168 Michael Couchman u4111670 Simon Oseineks u2566139 Caitlyn Young u4233209 Subject: ENGN3227 - Analogue Electronics
A Digital Timer Implementation using 7 Segment Displays Group Members: Tiffany Sham u2548168 Michael Couchman u4111670 Simon Oseineks u2566139 Caitlyn Young u4233209 Subject: ENGN3227 - Analogue Electronics
Implementing a Digital Answering Machine with a High-Speed 8-Bit Microcontroller
 Implementing a Digital Answering Machine with a High-Speed 8-Bit Microcontroller Zafar Ullah Senior Application Engineer Scenix Semiconductor Inc. Leo Petropoulos Application Manager Invox TEchnology 1.0
Implementing a Digital Answering Machine with a High-Speed 8-Bit Microcontroller Zafar Ullah Senior Application Engineer Scenix Semiconductor Inc. Leo Petropoulos Application Manager Invox TEchnology 1.0
FlowKit in-circuit debug system
 FlowKit in-circuit debug system www.matrixmultimedia.com HP299 Contents About this document 3 Board layout 3 General information 4 Detailed operation 4 Circuit diagram 7 2 Copyright About this document
FlowKit in-circuit debug system www.matrixmultimedia.com HP299 Contents About this document 3 Board layout 3 General information 4 Detailed operation 4 Circuit diagram 7 2 Copyright About this document
CELL PHONE CONTROL ROBOT CAR
 CELL PHONE CONTROL ROBOT CAR Sakshi Choudhary 1, Satendra Singh 2, Vikrant 3, SK Dubey 4 1,2 UG Students of Department of ECE AIMT, Greater Noida (India) 3 Assistant Professor, Department of ECE AIMT,
CELL PHONE CONTROL ROBOT CAR Sakshi Choudhary 1, Satendra Singh 2, Vikrant 3, SK Dubey 4 1,2 UG Students of Department of ECE AIMT, Greater Noida (India) 3 Assistant Professor, Department of ECE AIMT,
Special Lecture. Basic Stamp 2 Programming. (Presented on popular demand)
") Special Lecture Basic Stamp 2 Programming (Presented on popular demand) Programming Environment Servo Motor: How It Work? The editor window consists of the main edit pane with an integrated explorer panel
Special Lecture Basic Stamp 2 Programming (Presented on popular demand) Programming Environment Servo Motor: How It Work? The editor window consists of the main edit pane with an integrated explorer panel
W a d i a D i g i t a l
 Wadia Decoding Computer Overview A Definition What is a Decoding Computer? The Wadia Decoding Computer is a small form factor digital-to-analog converter with digital pre-amplifier capabilities. It is
Wadia Decoding Computer Overview A Definition What is a Decoding Computer? The Wadia Decoding Computer is a small form factor digital-to-analog converter with digital pre-amplifier capabilities. It is
PolyBot Board. User's Guide V1.11 9/20/08
 PolyBot Board User's Guide V1.11 9/20/08 PolyBot Board v1.1 16 pin LCD connector 4-pin SPI port (can be used as digital I/O) 10 Analog inputs +5V GND GND JP_PWR 3-pin logic power jumper (short top 2 pins
PolyBot Board User's Guide V1.11 9/20/08 PolyBot Board v1.1 16 pin LCD connector 4-pin SPI port (can be used as digital I/O) 10 Analog inputs +5V GND GND JP_PWR 3-pin logic power jumper (short top 2 pins
Innovative Practices in Optimal Utilization of Solar Energy (Solar Tracking System)
") Innovative Practices in Optimal Utilization of Solar Energy (Solar Tracking System) Dr. G. Suresh Babu EEE Dept., C.B.I.T Abstract: As the demand is ahead of the supply there is a dire need for efficient
Innovative Practices in Optimal Utilization of Solar Energy (Solar Tracking System) Dr. G. Suresh Babu EEE Dept., C.B.I.T Abstract: As the demand is ahead of the supply there is a dire need for efficient
Computer Automation Techniques. Arthur Carroll
 Computer Automation Techniques Arthur Carroll 1 Three Types of Computers Micro-Controller Single Board Computer Desktop Computer 2 The Micro-Controller Small inexpensive DIP or surface mount chips Roughly
Computer Automation Techniques Arthur Carroll 1 Three Types of Computers Micro-Controller Single Board Computer Desktop Computer 2 The Micro-Controller Small inexpensive DIP or surface mount chips Roughly
MODULE BOUSSOLE ÉLECTRONIQUE CMPS03 Référence : 0660-3
 MODULE BOUSSOLE ÉLECTRONIQUE CMPS03 Référence : 0660-3 CMPS03 Magnetic Compass. Voltage : 5v only required Current : 20mA Typ. Resolution : 0.1 Degree Accuracy : 3-4 degrees approx. after calibration Output
MODULE BOUSSOLE ÉLECTRONIQUE CMPS03 Référence : 0660-3 CMPS03 Magnetic Compass. Voltage : 5v only required Current : 20mA Typ. Resolution : 0.1 Degree Accuracy : 3-4 degrees approx. after calibration Output
Hand Gestures Remote Controlled Robotic Arm
 Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 601-606 Research India Publications http://www.ripublication.com/aeee.htm Hand Gestures Remote Controlled
Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 601-606 Research India Publications http://www.ripublication.com/aeee.htm Hand Gestures Remote Controlled
Digital Signal Controller Based Automatic Transfer Switch
 Digital Signal Controller Based Automatic Transfer Switch by Venkat Anant Senior Staff Applications Engineer Freescale Semiconductor, Inc. Abstract: An automatic transfer switch (ATS) enables backup generators,
Digital Signal Controller Based Automatic Transfer Switch by Venkat Anant Senior Staff Applications Engineer Freescale Semiconductor, Inc. Abstract: An automatic transfer switch (ATS) enables backup generators,
Accurate Measurement of the Mains Electricity Frequency
 Accurate Measurement of the Mains Electricity Frequency Dogan Ibrahim Near East University, Faculty of Engineering, Lefkosa, TRNC [email protected] Abstract The frequency of the mains electricity supply
Accurate Measurement of the Mains Electricity Frequency Dogan Ibrahim Near East University, Faculty of Engineering, Lefkosa, TRNC [email protected] Abstract The frequency of the mains electricity supply
Cellphone Based Device Control With Voice Acknowledgement
 Cellphone Based Device Control With Voice Acknowledgement Avigyan Datta Gupta 1, Sayan Samanta 2, Avishek Acharjee 3 1,2 Future Institute of Engineering and Management, Kolkata-700150 3 Techno India, Kolkata-700150
Cellphone Based Device Control With Voice Acknowledgement Avigyan Datta Gupta 1, Sayan Samanta 2, Avishek Acharjee 3 1,2 Future Institute of Engineering and Management, Kolkata-700150 3 Techno India, Kolkata-700150
EvB 5.1 v5 User s Guide
 EvB 5.1 v5 User s Guide Page 1 Contents Introduction... 4 The EvB 5.1 v5 kit... 5 Power supply...6 Programmer s connector...7 USB Port... 8 RS485 Port...9 LED's...10 Pushbuttons... 11 Potentiometers and
EvB 5.1 v5 User s Guide Page 1 Contents Introduction... 4 The EvB 5.1 v5 kit... 5 Power supply...6 Programmer s connector...7 USB Port... 8 RS485 Port...9 LED's...10 Pushbuttons... 11 Potentiometers and
Embedded Software Development: Spottbillige Hardware + OSS = Zum Spielen zu Schade!
 Embedded Software Development: Spottbillige Hardware + OSS = Zum Spielen zu Schade! Gregor Hohpe www.eaipatterns.com OOP 2012 1 Microcontrollers CPU core, memory, and I/O (analog, digital) on one chip
Embedded Software Development: Spottbillige Hardware + OSS = Zum Spielen zu Schade! Gregor Hohpe www.eaipatterns.com OOP 2012 1 Microcontrollers CPU core, memory, and I/O (analog, digital) on one chip
Data Acquisition Module with I2C interface «I2C-FLEXEL» User s Guide
 Data Acquisition Module with I2C interface «I2C-FLEXEL» User s Guide Sensors LCD Real Time Clock/ Calendar DC Motors Buzzer LED dimming Relay control I2C-FLEXEL PS2 Keyboards Servo Motors IR Remote Control
Data Acquisition Module with I2C interface «I2C-FLEXEL» User s Guide Sensors LCD Real Time Clock/ Calendar DC Motors Buzzer LED dimming Relay control I2C-FLEXEL PS2 Keyboards Servo Motors IR Remote Control
Home Security System Using Gsm Modem
 RESEARCH ARTICLE OPEN ACCESS Home Security System Using Gsm Modem Mehek Potnis 1, Ayesha Chimnani 1, Vishal Chawla 1 Mr. Amit Hatekar 2 1. Undergraduate Students, Department of EXTC, Thadomal Shahani Engineering
RESEARCH ARTICLE OPEN ACCESS Home Security System Using Gsm Modem Mehek Potnis 1, Ayesha Chimnani 1, Vishal Chawla 1 Mr. Amit Hatekar 2 1. Undergraduate Students, Department of EXTC, Thadomal Shahani Engineering
MC433 Stepper Motor Controller
 MC433 Stepper Motor Controller 4 Axis, 10A PWM Hardware Reference Guide PCB Rev 1.1,1.1b MC433 Rev 1-1(b) Hardware Reference Guide Manual Revision 0.95 Warranty Statement SOC Robotics warrants that the
MC433 Stepper Motor Controller 4 Axis, 10A PWM Hardware Reference Guide PCB Rev 1.1,1.1b MC433 Rev 1-1(b) Hardware Reference Guide Manual Revision 0.95 Warranty Statement SOC Robotics warrants that the
Application Note: Using the Motor Driver on the 3pi Robot and Orangutan Robot Controllers
 Application Note: Using the Motor Driver on the 3pi Robot and Orangutan Robot 1. Introduction..................................................... 2 2. Motor Driver Truth Tables.............................................
Application Note: Using the Motor Driver on the 3pi Robot and Orangutan Robot 1. Introduction..................................................... 2 2. Motor Driver Truth Tables.............................................
8-Bit Flash Microcontroller for Smart Cards. AT89SCXXXXA Summary. Features. Description. Complete datasheet available under NDA
 Features Compatible with MCS-51 products On-chip Flash Program Memory Endurance: 1,000 Write/Erase Cycles On-chip EEPROM Data Memory Endurance: 100,000 Write/Erase Cycles 512 x 8-bit RAM ISO 7816 I/O Port
Features Compatible with MCS-51 products On-chip Flash Program Memory Endurance: 1,000 Write/Erase Cycles On-chip EEPROM Data Memory Endurance: 100,000 Write/Erase Cycles 512 x 8-bit RAM ISO 7816 I/O Port
ECONseries Low Cost USB DAQ
 ECONseries Low Cost USB Data Acquisition Modules ECONseries Low Cost USB DAQ The ECONseries is a flexible yet economical series of multifunction data acquisition modules. You choose the number of analog
ECONseries Low Cost USB Data Acquisition Modules ECONseries Low Cost USB DAQ The ECONseries is a flexible yet economical series of multifunction data acquisition modules. You choose the number of analog
ECE 495 Project 3: Shocker Actuator Subsystem and Website Design. Group 1: One Awesome Engineering
 ECE 495 Project 3: Shocker Actuator Subsystem and Website Design Group 1: One Awesome Engineering Luquita Edwards Evan Whetsell Sunny Verma Thomas Ryan Willis Long I. Executive Summary The main goal behind
ECE 495 Project 3: Shocker Actuator Subsystem and Website Design Group 1: One Awesome Engineering Luquita Edwards Evan Whetsell Sunny Verma Thomas Ryan Willis Long I. Executive Summary The main goal behind
Crazy Alarm Clock L A K S H M I M E Y Y A P P A N J A M E S K A Y E W I L L I A M D I E H L C O N G C H E N
 Crazy Alarm Clock L A K S H M I M E Y Y A P P A N J A M E S K A Y E W I L L I A M D I E H L C O N G C H E N Overview Problem: Some people hit snooze excessively every morning rather than getting out of
Crazy Alarm Clock L A K S H M I M E Y Y A P P A N J A M E S K A Y E W I L L I A M D I E H L C O N G C H E N Overview Problem: Some people hit snooze excessively every morning rather than getting out of
Cell Phone Operated Robotic Car
 Cell Phone Operated Robotic Car Awab Fakih, Jovita Serrao Abstract Conventionally, wireless-controlled robots use RF circuits, which have the drawbacks of limited working range, limited frequency range
Cell Phone Operated Robotic Car Awab Fakih, Jovita Serrao Abstract Conventionally, wireless-controlled robots use RF circuits, which have the drawbacks of limited working range, limited frequency range
POCKET SCOPE 2. The idea 2. Design criteria 3
 POCKET SCOPE 2 The idea 2 Design criteria 3 Microcontroller requirements 3 The microcontroller must have speed. 3 The microcontroller must have RAM. 3 The microcontroller must have secure Flash. 3 The
POCKET SCOPE 2 The idea 2 Design criteria 3 Microcontroller requirements 3 The microcontroller must have speed. 3 The microcontroller must have RAM. 3 The microcontroller must have secure Flash. 3 The
Interfacing Analog to Digital Data Converters
 Converters In most of the cases, the PIO 8255 is used for interfacing the analog to digital converters with microprocessor. We have already studied 8255 interfacing with 8086 as an I/O port, in previous
Converters In most of the cases, the PIO 8255 is used for interfacing the analog to digital converters with microprocessor. We have already studied 8255 interfacing with 8086 as an I/O port, in previous
C8051F020 Utilization in an Embedded Digital Design Project Course. Daren R. Wilcox Southern Polytechnic State University Marietta, Georgia
 C8051F020 Utilization in an Embedded Digital Design Project Course Daren R. Wilcox Southern Polytechnic State University Marietta, Georgia Abstract In this paper, the utilization of the C8051F020 in an
C8051F020 Utilization in an Embedded Digital Design Project Course Daren R. Wilcox Southern Polytechnic State University Marietta, Georgia Abstract In this paper, the utilization of the C8051F020 in an
Lecture N -1- PHYS 3330. Microcontrollers
 Lecture N -1- PHYS 3330 Microcontrollers If you need more than a handful of logic gates to accomplish the task at hand, you likely should use a microcontroller instead of discrete logic gates 1. Microcontrollers
Lecture N -1- PHYS 3330 Microcontrollers If you need more than a handful of logic gates to accomplish the task at hand, you likely should use a microcontroller instead of discrete logic gates 1. Microcontrollers
Microcontrollers in Practice
 M. Mitescu I. Susnea Microcontrollers in Practice With 117 Figures, 34 Tables and CD-Rom 4y Springer Contents Resources of Microcontrollers, 1 1.1 In this Chapter 1 1.2 Microcontroller Architectures 1
M. Mitescu I. Susnea Microcontrollers in Practice With 117 Figures, 34 Tables and CD-Rom 4y Springer Contents Resources of Microcontrollers, 1 1.1 In this Chapter 1 1.2 Microcontroller Architectures 1
Six-servo Robot Arm. DAGU Hi-Tech Electronic Co., LTD www.arexx.com.cn. Six-servo Robot Arm
 Six-servo Robot Arm 1 1, Introduction 1.1, Function Briefing Servo robot, as the name suggests, is the six servo motor-driven robot arm. Since the arm has a few joints, we can imagine, our human arm, in
Six-servo Robot Arm 1 1, Introduction 1.1, Function Briefing Servo robot, as the name suggests, is the six servo motor-driven robot arm. Since the arm has a few joints, we can imagine, our human arm, in
Lab Experiment 1: The LPC 2148 Education Board
 Lab Experiment 1: The LPC 2148 Education Board 1 Introduction The aim of this course ECE 425L is to help you understand and utilize the functionalities of ARM7TDMI LPC2148 microcontroller. To do that,
Lab Experiment 1: The LPC 2148 Education Board 1 Introduction The aim of this course ECE 425L is to help you understand and utilize the functionalities of ARM7TDMI LPC2148 microcontroller. To do that,
Display Board Pulse Width Modulation (PWM) Power/Speed Controller Module
 Power/Speed Controller Module") Display Board Pulse Width Modulation (PWM) Power/Speed Controller Module RS0 Microcontroller LEDs Motor Control Pushbuttons Purpose: To demonstrate an easy way of using a Freescale RS0K2 microcontroller
Display Board Pulse Width Modulation (PWM) Power/Speed Controller Module RS0 Microcontroller LEDs Motor Control Pushbuttons Purpose: To demonstrate an easy way of using a Freescale RS0K2 microcontroller
Using ISO 15693 Compliant RFID Tags in an Inventory Control System
 Using ISO 15693 Compliant RFID Tags in an Inventory Control System University: Louisiana State University, Baton Rouge, Louisiana Course: Undergraduate Capstone Project Student Team Members: Joseph Gates,
Using ISO 15693 Compliant RFID Tags in an Inventory Control System University: Louisiana State University, Baton Rouge, Louisiana Course: Undergraduate Capstone Project Student Team Members: Joseph Gates,
Solar Energy Conversion using MIAC. by Tharowat Mohamed Ali, May 2011
 Solar Energy Conversion using MIAC by Tharowat Mohamed Ali, May 2011 Abstract This work introduces an approach to the design of a boost converter for a photovoltaic (PV) system using the MIAC. The converter
Solar Energy Conversion using MIAC by Tharowat Mohamed Ali, May 2011 Abstract This work introduces an approach to the design of a boost converter for a photovoltaic (PV) system using the MIAC. The converter
Using Altera MAX Series as Microcontroller I/O Expanders
 2014.09.22 Using Altera MAX Series as Microcontroller I/O Expanders AN-265 Subscribe Many microcontroller and microprocessor chips limit the available I/O ports and pins to conserve pin counts and reduce
2014.09.22 Using Altera MAX Series as Microcontroller I/O Expanders AN-265 Subscribe Many microcontroller and microprocessor chips limit the available I/O ports and pins to conserve pin counts and reduce
An Introduction to MPLAB Integrated Development Environment
 An Introduction to MPLAB Integrated Development Environment 2004 Microchip Technology Incorporated An introduction to MPLAB Integrated Development Environment Slide 1 This seminar is an introduction to
An Introduction to MPLAB Integrated Development Environment 2004 Microchip Technology Incorporated An introduction to MPLAB Integrated Development Environment Slide 1 This seminar is an introduction to
Monitoring of Intravenous Drip Rate
 Monitoring of Intravenous Drip Rate Vidyadhar V. Kamble, Prem C. Pandey, Chandrashekar P. Gadgil, and Dinesh S. Choudhary Abstract A drip rate meter, for monitoring intravenous infusion, is developed using
Monitoring of Intravenous Drip Rate Vidyadhar V. Kamble, Prem C. Pandey, Chandrashekar P. Gadgil, and Dinesh S. Choudhary Abstract A drip rate meter, for monitoring intravenous infusion, is developed using
Points Position Indicator (PPI1) for Points Motors with Common Ground
 for Points Motors with Common Ground") Points Position Indicator (PPI1) for Points Motors with Common Ground Monitors Points Action and Operates Leds on a Control Panel Monitors the brief positive operating voltage across points motors when
Points Position Indicator (PPI1) for Points Motors with Common Ground Monitors Points Action and Operates Leds on a Control Panel Monitors the brief positive operating voltage across points motors when
APPLICATION NOTE. Atmel AVR443: Sensor-based Control of Three Phase Brushless DC Motor. Atmel AVR 8-bit Microcontrollers. Features.
 APPLICATION NOTE Features Atmel AVR443: Sensor-based Control of Three Phase Brushless DC Motor Less than 5µs response time on Hall sensor output change Theoretical maximum of 1600k RPM Over-current sensing
APPLICATION NOTE Features Atmel AVR443: Sensor-based Control of Three Phase Brushless DC Motor Less than 5µs response time on Hall sensor output change Theoretical maximum of 1600k RPM Over-current sensing
CHAPTER 11: Flip Flops
 CHAPTER 11: Flip Flops In this chapter, you will be building the part of the circuit that controls the command sequencing. The required circuit must operate the counter and the memory chip. When the teach
CHAPTER 11: Flip Flops In this chapter, you will be building the part of the circuit that controls the command sequencing. The required circuit must operate the counter and the memory chip. When the teach
FFT Frequency Detection on the dspic
 FFT Frequency Detection on the dspic by Jac Kersing Nov 2012 Abstract In this article Jac explains how he solved a practical challenge using powerful dspic devices and Fast Fourier Transform algorithms.
FFT Frequency Detection on the dspic by Jac Kersing Nov 2012 Abstract In this article Jac explains how he solved a practical challenge using powerful dspic devices and Fast Fourier Transform algorithms.
STK500... User Guide
 STK500... User Guide Table of Contents Section 1 Introduction... 1-1 1.1 Starter Kit Features...1-1 1.2 Device Support...1-2 Section 2 Getting Started... 2-1 2.1 Unpacking the System...2-1 2.2 System
STK500... User Guide Table of Contents Section 1 Introduction... 1-1 1.1 Starter Kit Features...1-1 1.2 Device Support...1-2 Section 2 Getting Started... 2-1 2.1 Unpacking the System...2-1 2.2 System
A Surveillance Robot with Climbing Capabilities for Home Security
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 2, Issue. 11, November 2013,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 2, Issue. 11, November 2013,
MECE 102 Mechatronics Engineering Orientation
 MECE 102 Mechatronics Engineering Orientation Mechatronic System Components Associate Prof. Dr. of Mechatronics Engineering Çankaya University Compulsory Course in Mechatronics Engineering Credits (2/0/2)
MECE 102 Mechatronics Engineering Orientation Mechatronic System Components Associate Prof. Dr. of Mechatronics Engineering Çankaya University Compulsory Course in Mechatronics Engineering Credits (2/0/2)
International Journal of Engineering Research & Management Technology
 International Journal of Engineering Research & Management Technology March- 2015 Volume 2, Issue-2 Radio Frequency Identification Security System Mr. Shailendra Kumar Assistant Professor Department of
International Journal of Engineering Research & Management Technology March- 2015 Volume 2, Issue-2 Radio Frequency Identification Security System Mr. Shailendra Kumar Assistant Professor Department of
Microcontroller Based Anti-theft Security System Using GSM Networks with Text Message as Feedback
 International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 2, Issue 10 (August 2012), PP. 18-22 Microcontroller Based Anti-theft Security System
International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 2, Issue 10 (August 2012), PP. 18-22 Microcontroller Based Anti-theft Security System
AVR126: ADC of megaavr in Single Ended Mode. Introduction. Features. AVR 8-bit Microcontrollers APPLICATION NOTE
 AVR 8-bit Microcontrollers AVR126: ADC of megaavr in Single Ended Mode APPLICATION NOTE Introduction Atmel megaavr devices have a successive approximation Analog-to- Digital Converter (ADC) capable of
AVR 8-bit Microcontrollers AVR126: ADC of megaavr in Single Ended Mode APPLICATION NOTE Introduction Atmel megaavr devices have a successive approximation Analog-to- Digital Converter (ADC) capable of
Android Controlled Based Interface
 Android Controlled Based Interface Objective Fix Foba Build Rofi (Fifth Generation Robot) Develop, Build, and Implement a Dynamic Balanced Biped Robot Table of Contents Objective... 1 Android Controlled
Android Controlled Based Interface Objective Fix Foba Build Rofi (Fifth Generation Robot) Develop, Build, and Implement a Dynamic Balanced Biped Robot Table of Contents Objective... 1 Android Controlled
1115 4G SERIES GOVERNOR. 4-20 ma ANALOGUE DIGITAL SPEED SETTING
 1115 4G SERIES GOVERNOR with 4-20 ma ANALOGUE & DIGITAL SPEED SETTING PO Box 28, 9300AA Roden, The Netherlands Tel: +31 505019888 Fax: +31 505013618 E-mail: [email protected] 1115 4G
1115 4G SERIES GOVERNOR with 4-20 ma ANALOGUE & DIGITAL SPEED SETTING PO Box 28, 9300AA Roden, The Netherlands Tel: +31 505019888 Fax: +31 505013618 E-mail: [email protected] 1115 4G
M68EVB908QL4 Development Board for Motorola MC68HC908QL4
 M68EVB908QL4 Development Board for Motorola MC68HC908QL4! Axiom Manufacturing 2813 Industrial Lane Garland, TX 75041 Email: [email protected] Web: http://www.axman.com! CONTENTS CAUTIONARY NOTES...3 TERMINOLOGY...3
M68EVB908QL4 Development Board for Motorola MC68HC908QL4! Axiom Manufacturing 2813 Industrial Lane Garland, TX 75041 Email: [email protected] Web: http://www.axman.com! CONTENTS CAUTIONARY NOTES...3 TERMINOLOGY...3
Secure My-d TM and Mifare TM RFID reader system by using a security access module Erich Englbrecht ([email protected]) V0.1draft
 V0.1draft") Application Report Secure My-d TM and Mifare TM RFID reader system by using a security access module Erich Englbrecht ([email protected]) V0.1draft Embedded RF ABSTRACT This application report describes
Application Report Secure My-d TM and Mifare TM RFID reader system by using a security access module Erich Englbrecht ([email protected]) V0.1draft Embedded RF ABSTRACT This application report describes
Pulse Width Modulation
 Pulse Width Modulation Pulse width modulation (PWM) is a powerful technique for controlling analog circuits with a microprocessor's digital outputs. PWM is employed in a wide variety of applications, ranging
Pulse Width Modulation Pulse width modulation (PWM) is a powerful technique for controlling analog circuits with a microprocessor's digital outputs. PWM is employed in a wide variety of applications, ranging
Programming PIC Microcontrollers in PicBasic Pro Lesson 1 Cornerstone Electronics Technology and Robotics II
 Programming PIC Microcontrollers in PicBasic Pro Lesson 1 Cornerstone Electronics Technology and Robotics II Administration: o Prayer PicBasic Pro Programs Used in This Lesson: o General PicBasic Pro Program
Programming PIC Microcontrollers in PicBasic Pro Lesson 1 Cornerstone Electronics Technology and Robotics II Administration: o Prayer PicBasic Pro Programs Used in This Lesson: o General PicBasic Pro Program
SMARTCARD XPRO. Preface. SMART ARM-based Microcontrollers USER GUIDE
 SMART ARM-based Microcontrollers SMARTCARD XPRO USER GUIDE Preface Atmel SMARTCARD Xplained Pro is an extension board to the Atmel Xplained Pro evaluation platform. Atmel SMARTCARD Xplained Pro is designed
SMART ARM-based Microcontrollers SMARTCARD XPRO USER GUIDE Preface Atmel SMARTCARD Xplained Pro is an extension board to the Atmel Xplained Pro evaluation platform. Atmel SMARTCARD Xplained Pro is designed
revolution Contents: Introduction Power 28-pin Project Board with input/output cables
 28-PIN IN IN PROJECT BOARD Contents: AXE020 28-pin Project Board with input/output cables Introduction The 28-pin project board is designed to allow rapid prototyping with 28-pin PICAXE microcontrollers.
28-PIN IN IN PROJECT BOARD Contents: AXE020 28-pin Project Board with input/output cables Introduction The 28-pin project board is designed to allow rapid prototyping with 28-pin PICAXE microcontrollers.
How To Control A Motor Control On An Hvac Platform
 Freescale Semiconductor Document Number:AN4616 Application Note Rev. 0, 10/2012 Flap Motor Control Based On HVAC Platform by: Shawn Shi, Albert Chen, Alex Liu 1 Introduction According to the world market
Freescale Semiconductor Document Number:AN4616 Application Note Rev. 0, 10/2012 Flap Motor Control Based On HVAC Platform by: Shawn Shi, Albert Chen, Alex Liu 1 Introduction According to the world market
GLOLAB Universal Telephone Hold
 GLOLAB Universal Telephone Hold 1 UNIVERSAL HOLD CIRCUIT If you have touch tone telephone service, you can now put a call on hold from any phone in the house, even from cordless phones and phones without
GLOLAB Universal Telephone Hold 1 UNIVERSAL HOLD CIRCUIT If you have touch tone telephone service, you can now put a call on hold from any phone in the house, even from cordless phones and phones without
.OPERATING SUPPLY VOLTAGE UP TO 46 V
 L298 DUAL FULL-BRIDGE DRIVER.OPERATING SUPPLY VOLTAGE UP TO 46 V TOTAL DC CURRENT UP TO 4 A. LOW SATURATION VOLTAGE OVERTEMPERATURE PROTECTION LOGICAL "0" INPUT VOLTAGE UP TO 1.5 V (HIGH NOISE IMMUNITY)
L298 DUAL FULL-BRIDGE DRIVER.OPERATING SUPPLY VOLTAGE UP TO 46 V TOTAL DC CURRENT UP TO 4 A. LOW SATURATION VOLTAGE OVERTEMPERATURE PROTECTION LOGICAL "0" INPUT VOLTAGE UP TO 1.5 V (HIGH NOISE IMMUNITY)
Selecting and Implementing H-Bridges in DC Motor Control. Daniel Phan A37005649
 Selecting and Implementing H-Bridges in DC Motor Control Daniel Phan A37005649 ECE 480 Design Team 3 Spring 2011 Abstract DC motors can be used in a number of applications that require automated movements.
Selecting and Implementing H-Bridges in DC Motor Control Daniel Phan A37005649 ECE 480 Design Team 3 Spring 2011 Abstract DC motors can be used in a number of applications that require automated movements.
DEPARTMENT OF COMPUTER SCIENCE & ENGINEERING Question Bank Subject Name: EC6504 - Microprocessor & Microcontroller Year/Sem : II/IV
 DEPARTMENT OF COMPUTER SCIENCE & ENGINEERING Question Bank Subject Name: EC6504 - Microprocessor & Microcontroller Year/Sem : II/IV UNIT I THE 8086 MICROPROCESSOR 1. What is the purpose of segment registers
DEPARTMENT OF COMPUTER SCIENCE & ENGINEERING Question Bank Subject Name: EC6504 - Microprocessor & Microcontroller Year/Sem : II/IV UNIT I THE 8086 MICROPROCESSOR 1. What is the purpose of segment registers
0832 Dot Matrix Green Display Information Board User s Guide
 0832 Dot Matrix Green Display Information Board User s Guide DE-DP105_Ver1.0 0832 DOT MATRIX GREEN DISPLAY INFORMATI BOARD USER S GUIDE Table of contents Chapter1.Overview... 1 1.1. Welcome... 1 1.2. Quick
0832 Dot Matrix Green Display Information Board User s Guide DE-DP105_Ver1.0 0832 DOT MATRIX GREEN DISPLAY INFORMATI BOARD USER S GUIDE Table of contents Chapter1.Overview... 1 1.1. Welcome... 1 1.2. Quick
Digital Single Axis Controller
 Digital Single Axis Controller The concept of intelligent hydraulic drive a vision? DSAC (Digital Single Axis Controller) Do you need hydraulic servo drive for your machine/system? What would it be like
Digital Single Axis Controller The concept of intelligent hydraulic drive a vision? DSAC (Digital Single Axis Controller) Do you need hydraulic servo drive for your machine/system? What would it be like
AUTOMATIC NIGHT LAMP WITH MORNING ALARM USING MICROPROCESSOR
 AUTOMATIC NIGHT LAMP WITH MORNING ALARM USING MICROPROCESSOR INTRODUCTION This Project "Automatic Night Lamp with Morning Alarm" was developed using Microprocessor. It is the Heart of the system. The sensors
AUTOMATIC NIGHT LAMP WITH MORNING ALARM USING MICROPROCESSOR INTRODUCTION This Project "Automatic Night Lamp with Morning Alarm" was developed using Microprocessor. It is the Heart of the system. The sensors
Microcontroller Based Low Cost Portable PC Mouse and Keyboard Tester
 Leonardo Journal of Sciences ISSN 1583-0233 Issue 20, January-June 2012 p. 31-36 Microcontroller Based Low Cost Portable PC Mouse and Keyboard Tester Ganesh Sunil NHIVEKAR *, and Ravidra Ramchandra MUDHOLKAR
Leonardo Journal of Sciences ISSN 1583-0233 Issue 20, January-June 2012 p. 31-36 Microcontroller Based Low Cost Portable PC Mouse and Keyboard Tester Ganesh Sunil NHIVEKAR *, and Ravidra Ramchandra MUDHOLKAR
Construction and Application of a Computer Based Interface Card
 Session 4 Construction and Application of a Computer Based Interface Card Michael Combs Telescope Operations Engineer [email protected] Morehead State University Morehead, Kentucky Ahmad Zargari,
Session 4 Construction and Application of a Computer Based Interface Card Michael Combs Telescope Operations Engineer [email protected] Morehead State University Morehead, Kentucky Ahmad Zargari,