|
|
|
- Christal Stephens
- 8 years ago
- Views:
Transcription
1

2
3
4
5
6

7

8
9
10

11
12

13

14

15

16

17
18
19

20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
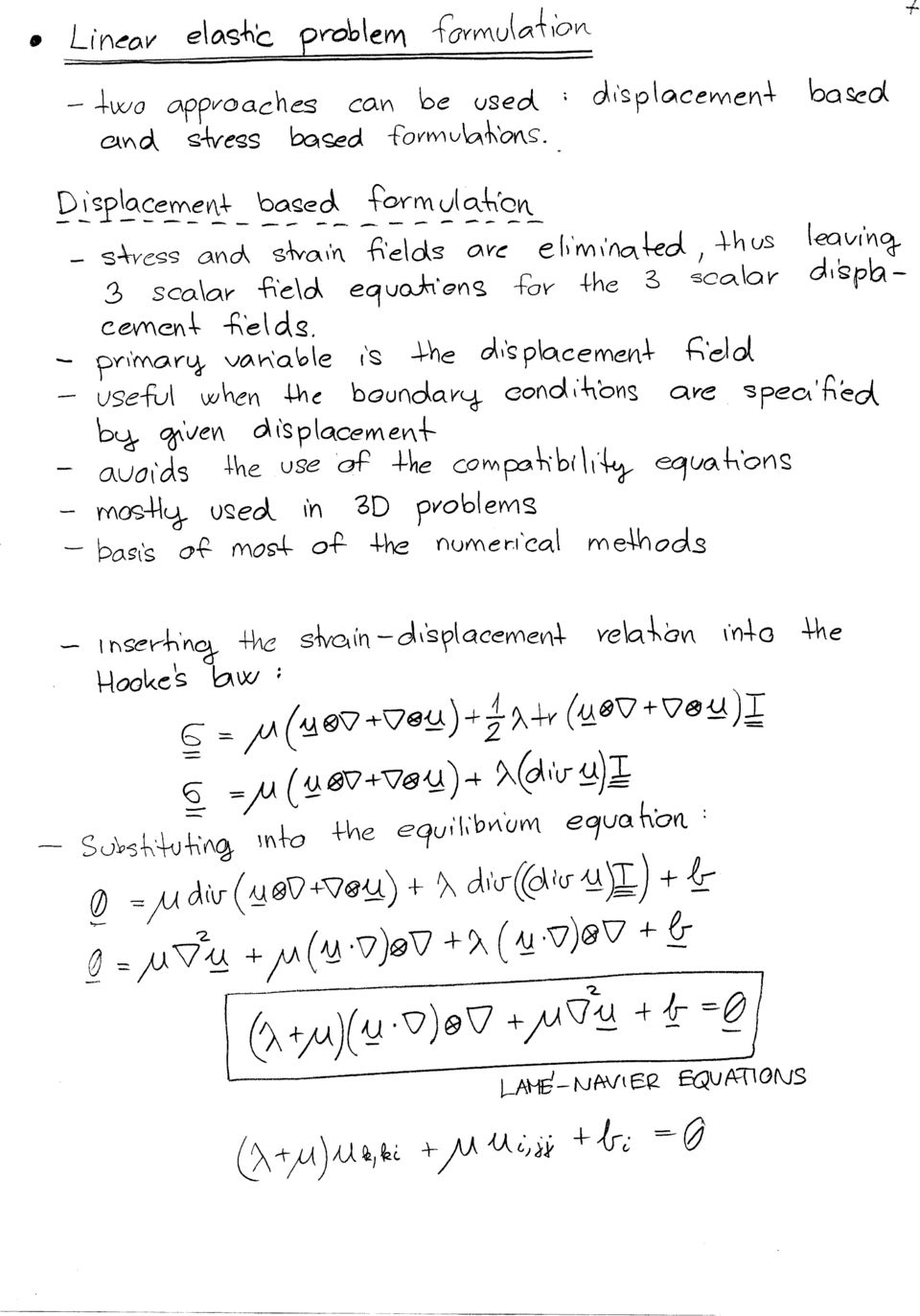
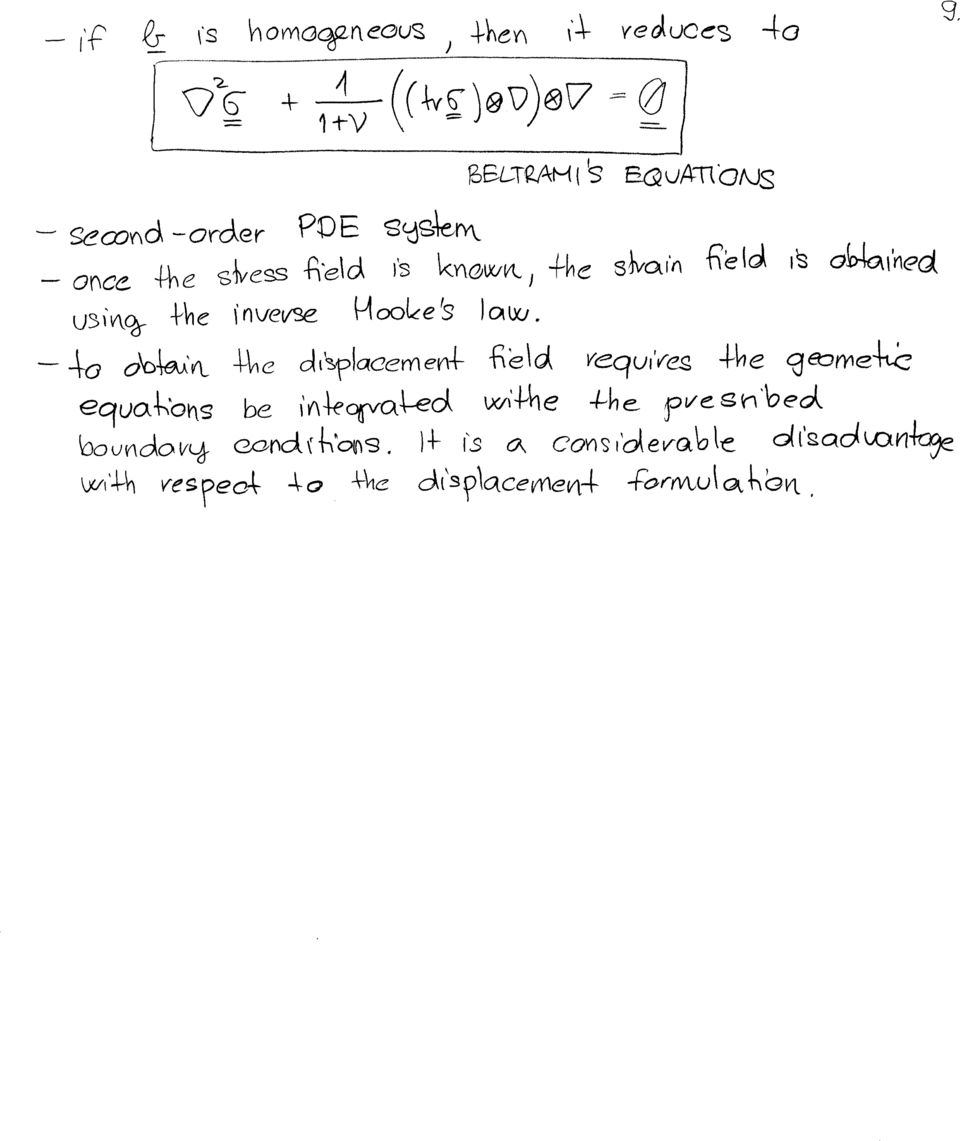
93 3 Theory of small strain elastoplasticity 3.1 Analysis of stress and strain Stress invariants Consider the Cauchy stress tensor σ. The characteristic equation of σ is σ 3 I 1 σ +I 2 σ I 3 δ = 0, (3.1) where the scalar stress invariants I 1, I 2 and I 2 are computed according to the formulas (de Souza Neto et al., 2008): I 1 = trσ, I 2 = 1 2 ( (trσ) 2 tr ( σ 2)), I 3 = detσ. (3.2) These stress invariants can be written in a simpler form using Cauchy principal stresses: I 1 = σ 1 +σ 2 +σ 3, I 2 = σ 1 σ 2 +σ 2 σ 3 +σ 3 σ 1, I 3 = σ 1 σ 2 σ 3. (3.3) The deviatoric stress tensor is obtained by substracting the hydrostatic (or spherical) stress tensor p from the Cauchy stress tensor: s = σ p = σ pδ, where p = 1 trσ. (3.4) 3 Its scalar invariants are J 1 = trs = 0, J 2 = 1 2 tr( s 2), J 3 = dets = 1 3 tr( s 3). (3.5) 19
94 CHAPTER 3. THEORY OF SMALL STRAIN ELASTOPLASTICITY The characteristic equation of the deviatoric stress s is s 3 J 2 s J 3 δ = 0, (3.6) where the stress invariants J 2 and J 3 can be expressed using the principal stress of s: J 1 = s 1 +s 2 +s 3 = 0, J 2 = 1 2 The relations between the invariants J 1, J 2, J 3 and I 1, I 2, I 3 are J 2 = 1 3 ( I 2 1 3I 2 ), J3 = 1 27 ( ) s 2 1 +s 2 2 +s 2 3, J3 = s 1 s 2 s 3 = 1 ( ) s s 3 2 +s 3 3. (3.7) ( 2I 3 1 9I 1 I 2 +27I 3 ). (3.8) Haigh Westergaard stress space In the study of elastoplasticity theory, it is usually convenient if we can somehow illustrate the meaning of expressions using geometrical representation. The basis of such illustrations is the introduction of the so-called Haigh Westergaard stress space (Chen and Han, 2007; Haigh, 1920; Westergaard, 1920), where principal stresses are taken as coordinate axes. In this principal stress space, it is possible to illustrate a certain stress state 1 as a geometrical point with coordinates σ 1, σ 2 and σ 3, as shown in Figure 3.1. Figure 3.1: Haigh Westergaard stress space. The straight line for which σ 1 = σ 2 = σ 3 defines the hydrostatic axis, while the planes perpendicular to this axis are the deviatoric planes. The particular deviatoric plane containing the origin O is called as π-plane. The distance of a deviatoric plane from the origin is measured with the parameter ζ as ζ = ζ = 3p. (3.9) 1 It should be noted that twostressmatriceswith the sameeigenvaluesbut with different eigenvectororientations are mapped to the same geometrical point in the principal stress space. Consequently, this type of illustration does not provide information about the stress orientation with respect to the material body. 20
95 3.1. ANALYSIS OF STRESS AND STRAIN The deviatoric part ρ is defined as ρ = OP ON, (3.10) which can be represented by the vector components σ 1 p [ρ] = σ 2 p = σ 3 p with length s 1 s 2 s 3 (3.11) ρ = ρ = 2J 2 = s. (3.12a) The Lode angle measures the angle between the deviatoric projection of the σ 1 axis and the radius vector of the current stress point (Jirásek and Bažant, 2002). It is defined by the relation cos3θ = J 3 J 3 2. (3.13) Consequently, the principal stresses can be expressed as σ 1 = ζ ρ cosθ, σ 2 = ζ ( ρ cos θ 2π 3 σ 3 = ζ ( ρ cos θ+ 2π 3 Here, σ 1 σ 2 σ 3. (3.14) ), (3.15) ). (3.16) Linear elastic stress-strain relation The general form of the linear elastic stress-strain relation for isotropic material can be written as σ = D e : ε, (3.17) where ε is the small strain tensor, whereas D e denotes the fourth-order elasticity tensor, which can be formulated in general form as (Doghri, 2000) D e = 2GT +Kδ δ. (3.18) Expression (3.17) represents the Hooke s law. In (3.18), G stands for the shear modulus, while K denotes the bulk modulus. Their connections to the Young s modulus E and to the Poisson s ratio ν are (Chen and Saleeb, 1982; Sadd, 2009) G = E 2(1+ν), K = E 3(1 2ν). (3.19) 21
96 CHAPTER 3. THEORY OF SMALL STRAIN ELASTOPLASTICITY The inverse relation of (3.17) has the form ε = C e : σ, (3.20) where C e denotes the fourth-order elastic compliance tensor, the inverse of D e (Doghri, 2000): C e = 1 2G I ν E δ δ = 1 2G T + 1 δ δ. (3.21) 9K Decomposition of the strain The additive decomposition of the total strain into elastic and plastic parts is a fundamental assumption in the small strain elastoplasticity theory. It means the relation ε = ε e +ε p, (3.22) where ε denotes the total strain, whereas ε e and ε p stand for the elastic and for the plastic parts. The additive decomposition is also adopted for the strain rates. For one-dimensional case, Figure 3.2 illustrates the strain decomposition. Figure 3.2: Strain decomposition in uniaxial case. Furthermore, the strain tensor can be decomposed additively as ε = e+ǫ, (3.23) where e denotes the deviatoric strain tensor, whereas the volumetric strain tensor, ǫ, is given by ǫ = ǫδ, ǫ = 1 3 trε. (3.24) The decomposition into elastic and plastic parts is valid for the deviatoric and the volumetric strain, and for the strain rate quantities, as well. 22
97 3.2. YIELD CRITERIA 3.2 Yield criteria The law defining the elastic limit under an arbitrary combination of stresses is called yield criterion. In general three-dimensional case, where the stress state is described by six independent stress components, the yield criterion can be imagined as a yield surface in the six-dimensional stress space. This yield surface divides the whole stress space into elastic and plastic domains. Therefore, the yield criterion can be represented as a yield surface. In the Haigh Westergaard stress space, the yield surface constitutes a three-dimensional surface with the definition F (σ,σ Y ) = 0, (3.25) where F (σ,σ Y ) denotes the yield function, whereas σ Y represents the yield stress. F = 0 means yielding or plastic deformation, while for elastic deformation we have F < 0. Thus, the yield criterion is expressible in the form F (σ,σ Y ) 0. (3.26) A particular yield function depends on the definition of the equivalent stress and the characteristic of the yield stress. For isotropic materials the yield criterion can be written in terms of the scalar invariants of the total stress (Chen and Han, 2007): F (I 1,I 2,I 3,σ Y ) 0. (3.27) The von Mises yield criterion The von Mises yield criterion states that plastic yielding occurs, when the octahedral shearing stress reaches a critical value k = σ Y / 3 (von Mises, 1913). This behavior can be written using the yield function F (σ,σ Y ) = 3 2 s : s σ Y (3.28) or in an alternative way: F (σ,σ Y ) = J 2 k 1 2 s k. (3.29) The yield function (3.28) can be reformulated in a simpler, but equivalent form as F (s,r) = s R, (3.30) 2 where R = σ 3 Y (Simo andhughes, 1998). The yieldsurface corresponding to thisyield criterion is a cylinder parallel to the hydrostatic axis(see Figure 3.3). Consequently, its locus on a particular deviatoric plane (including the π-plane) is a circle with radius R. 23
98 CHAPTER 3. THEORY OF SMALL STRAIN ELASTOPLASTICITY Figure 3.3: (a) The von Mises yield surface. (b) Meridian plane of the von Mises yield surface The Drucker Prager yield criterion The Drucker Prager yield criterion is a simple modification of the von Mises criterion, in which the hydrostatic stress component is also included to introduce pressure-sensitivity (Drucker and Prager, 1952). The yield function for this case can be written as (Chen, 2007; de Souza Neto et al., 2008; Jirásek and Bažant, 2002) F (σ,σ Y,α) = 1 2 s +3αp k, (3.31) where α is an additional material parameter. The yield surface in the principal stress space is represented by a circular cone around the hydrostatic axis (see Figure 3.4). Figure 3.4: (a) Drucker Prager yield surface. (b) Meridian plane of the Drucker-Prager yield surface. The angle κ in the meridian plane is defined as tanκ = 6α. (3.32) 24
99 3.3. PLASTIC FLOW RULES 3.3 Plastic flow rules The material starts to deform plastically, when the yield surface is reached. Upon further loading, the deformation produces plastic flow. The direction of the plastic strain rate is defined according to the plastic flow rule ε p = λ g σ, (3.33) where the scalar function λ denotes the plastic multiplier (or consistency parameter), whereas g is the plastic potential function, which itself is a function of the stresses. The plastic flow rule is called associative if the plastic potential function in (3.33) equals to the yield function. Otherwise, the flow rule is termed non-associative. For the associative case, the direction of the strain rate is the outward normal of the yield surface, whereas for non-associative flow rule it is the gradient of the plastic potential surface. 3.4 Hardening laws In uniaxial experiment, it is observed that the yield stress associated to a material can vary upon plastic loading. Furthermore, for some class of materials the yield stress in the reverse load direction (compression) is different than for tension. These phenomena can be modelled using various hardening law s. The simplest case is the perfectly plastic material, for which, the yield stress remains unchanged under loading. In this case the yield function becomes F (σ,σ Y0 ) = σ(σ) σ Y0, (3.34) where σ Y0 indicates the initial yield stress, whereas σ(σ) stands for the effective (or equivalent) stress Isotropic hardening The hardening behavior is termed isotropic if the shape of the yield surface remains fixed, whereas the size of the yield surface changes under plastic deformation. In other words, the yield surface expands without translation under plastic loading Linear isotropic hardening If the material behavior, in the plastic region of the uniaxial stress-strain curve, is modelled with linear schematization, then we arrive at the linear isotropic hardening rule: σ Y ( ε p ) = σ Y0 +H ε p, (3.35) 25
100 CHAPTER 3. THEORY OF SMALL STRAIN ELASTOPLASTICITY where the slope of the curve is given by the constant plastic hardening modulus H, whereas ε p denotes the accumulated (or cumulative) plastic strain, which defined by (Chen and Han, 2007) ε p = 2 t ε p dτ. 3 0 (3.36) An alternative, but equivalent, way to define the linear isotropic hardening is (Simo and Hughes, 1998) R(γ) = R 0 +hγ, (3.37) where R 0 = 2 3 σ Y0, h = 2 3 H, γ = t 0 ε p dτ. (3.38) Nonlinear isotropic hardening Nonlinear empirical idealization of the plastic hardening, in most cases, provides more accurate prediction of the material behavior. The most commonly used forms for the nonlinear isotropic hardening rule are the power law and the exponential law hardening (Doghri, 2000): σ Y ( ε p ) = σ Y0 +H 1 ( ε p ) m, and σ Y ( ε p ) = σ Y0 +σ Y ( 1 e m ε p ), (3.39) where H 1, m and σ Y are material parameters. There exist some other nonlinear schematizations, which can be found in the textbook of Skrzypek (1993), for instance Kinematic hardening The kinematic hardening rule assumes that during plastic flow, the yield surface translates in the stress space and its shape and size remains unchanged. This hardening model based on the Bauschinger effect observed in uniaxial tension-compression test for some material (Bauschinger, 1881; Lemaitre and Chaboche, 1990). The use of kinematic hardening rules involves the modification (shifting) the stress tensor σ with the so-called back-stress (or translation) tensor α, in the yield function. Thus, the yield function becomes F (σ α,σ Y ). Depending of the evolution of the back-stress tensor, a few kinematic hardening models exist. Two widely used rules are presented in the following Linear kinematic hardening The simplest evolutionary equation for the back-stress tensor α is the Prager s linear hardening rule (Chen and Han, 2007; de Souza Neto et al., 2008; Prager, 1955, 1956): α = 2 3 H εp = h ε p. (3.40) 26
101 3.5. ELASTIC-PLASTIC CONSTITUTIVE MODELS Nonlinear kinematic hardening Among different type of nonlinear kinematic hardening rules, the Armstrong Frederick s type is the most widely used and adopted one (Armstrong and Frederick, 1966; Frederick and Armstrong, 2007; Jirásek and Bažant, 2002). This rule introduces a fading memory effect of the strain path as α = 2 3 H εp B ε p α, (3.41) where B is a material constant Combined linear hardening By combining the isotropic and kinematic hardening rules we arrive at the combined hardening (or mixed hardening) rule, by which the characteristics of real materials can be predicted more accurately. The combined linear hardening rules involves both the linear isotropic hardening rule (3.35) and the linear evolutionary equation (3.40) for the back-stress. The plastic hardening modulus corresponding to the isotropic and to the kinematic hardening can be defined as H iso = MH, H kin = (1 M)H, h iso = 2 3 H iso, h kin = 2 3 H kin, (3.42) where the combined hardening parameter M [0,1] defines the share of the isotropic part in the total amount of hardening (Axelsson and Samuelsson, 1979; Chen and Han, 2007; Simo and Hughes, 1998). In this case, H iso has to be used in (3.35), whereas H kin replaces H in (3.40). Consequently, M = 1 means purely isotropic hardening, while M = 0 denotes purely kinematic hardening. 3.5 Elastic-plastic constitutive models Introduction This section presents the constitutive equations of the two elastic-plastic constitutive models under consideration in this dissertation. Besides the formulation of the corresponding elastoplastic tangent tensors, the inverse forms of the constitutive equations are also presented Associative von Mises elastoplasticity model with combined linear hardening Based on (3.30), the yield function of the von Mises elastoplasticity model with combined linear hardening is given by F = ξ R, (3.43) 27
102 CHAPTER 3. THEORY OF SMALL STRAIN ELASTOPLASTICITY where ξ = s α denotes the deviatoric relative (or reduced) stress. The plastic flow direction, according to (3.33), is defined by the associative flow rule ε p = λn, N = F σ = ξ ξ, εp = λ = γ, (3.44) where N represents the outward normal of the yield surface. The linear isotropic hardening rule (3.37) takes the form R(γ) = R 0 +h iso γ. (3.45) The evolutionary law for the back-stress according to the Prager s linear hardening rule (3.40) is defined as α = h kin ε p = λh kin N = λh kin ξ ξ. (3.46) The loading/unloading conditions can be expressed in the Kuhn-Tucker form as (de Souza Neto et al., 2008; Luenberger and Ye, 2008; Simo and Hughes, 1998) λ 0, F 0, λf = 0. (3.47) Theplastic multiplier canbederived fromtheconsistency condition F = 0usingwithcombination of (3.17) and (3.22): F = F σ : σ + F α : α Ṙ = N : De : ε (2G+h) λ, (3.48) λ = N : De : ε 2G+h = 2Gξ : ė (2G+h) ξ. (3.49) The fourth-order elastoplastic tangent tensor D ep, which relates the strain rate ε to the stress rate σ is computed from σ = D e : ε e = D e : ε D e : ε p = D e : ε N : De : ε 2G+h De : N (3.50) = (D e De : N N : D e ) : ε. (3.51) 2G+h Therefore the rate-form elastic-plastic constitutive equation has the following form: σ = D ep : ε, (3.52) where D ep = D e De : N N : D e 2G+h = D e 4G 2 (2G+h) ξ 2ξ ξ. (3.53) 28
103 3.5. ELASTIC-PLASTIC CONSTITUTIVE MODELS The constitutive equation (3.52) can be separated into deviatoric and hydrostatic (spherical) parts as follows and 4G 2 ṡ = 2Gė 2 (ξ : ė)ξ (3.54) (2G+h) ξ ṗ = 3K ǫ. (3.55) Itcanbeclearlyconcluded, thatinthismodel, thehydrostaticpartofthetotalstressisgovernedby pure elastic law. Therefore, the plastic deformation affects only the deviatoric stress components. The evolutionary equation for the back-stress can be expressed by combining (3.46) and (3.49): α = 2Gh(1 M) 2 (ξ : ė)ξ. (3.56) (2G+h) ξ The evolution law of the parameter R related to the yield stress is obtained by taking the time derivative of (3.45): Ṙ = 2GMh (ξ : ė). (2G+h) ξ (3.57) In this description, R represents the radius of the yield surface (cylinder). Finally, the definition for the rate of the deviatoric relative stress is given by ξ = ṡ α = 2Gė 2G ( ξ 2 1 Mh ) (ξ : ė)ξ. (3.58) 2G+h Inverse elastoplastic constitutive equation The inverse elastic-plastic constitutive equation, which relates the stress rate to the strain rate, is given by the relation ε = C ep : σ, (3.59) where the fourth-order elastoplastic compliance tangent tensor C ep can be derived by inverting the elastoplastic tangent tensor D ep using the Sherman Morrison formula (Sherman and Morrison, 1949; Szabó, 1985): C ep = (D ep ) 1 = C e + 1 h N N = Ce + 1 h ξ 2ξ ξ. (3.60) The constitutive equation (3.59) can be separated into deviatoric and hydrostatic parts as follows ė = 1 1 2Gṡ+ 2 (ξ : ṡ)ξ, (3.61) h ξ 29
104 CHAPTER 3. THEORY OF SMALL STRAIN ELASTOPLASTICITY and ǫ = 1 3Kṗ. (3.62) Combining (3.61) with (3.57), (3.58) and (3.56) we arrive at Ṙ = M (ξ : ṡ), ξ 1 M α = ξ 2 (ξ : ṡ)ξ, ξ = ṡ 1 M ξ 2 (ξ : ṡ)ξ. (3.63) Non-associative Drucker Prager elastoplasticity model with linear isotropic hardening The yield function (3.31) for the Drucker Prager model with linear isotropic hardening can be formulated as F = 1 2 s +3αp k. (3.64) Since non-associative case is considered, the plastic flow potential function has to be defined. A commonly adopted form is given by (Chen and Han, 2007) g = 1 2 s +3βp, (3.65) where β is a material parameter. The gradients of the yield function and the plastic potential function, with respect to σ are the following: N = F σ = Q = g σ = s 2 s +αδ, (3.66) s 2 s +βδ, (3.67) The non-associative flow rule for the plastic strain rate is defined using (3.33) as ( ) ε p = λq = λ s +βδ. (3.68) 2 s The norm of plastic strain rate and the rate of the accumulated plastic strain (3.36) are the following: ε p = λ β2, ε p = λ β2. (3.69) The linear isotropic hardening rule (3.35) for this model becomes (Chen and Han, 2007) 30 k( ε p ) = ( α+ 1 3 )σ Y ( ε p ). (3.70)
105 3.5. ELASTIC-PLASTIC CONSTITUTIVE MODELS The loading/unloading conditions can be expressed in the Kuhn Tucker form (3.47). The plastic multiplier can be obtained fromthe consistency condition F = 0, using with combination of (3.17) and (3.22): ( F = F ( σ : σ k = N : D e : ε λ N : D e : Q+H α+ 1 ) ) β2, (3.71) N : D λ e : ε = N : D e : Q+H (α+ 3 1 ) = 13 +2β2 where the scalar parameter h is defined as h = G+9Kαβ +H ( ) 1 2G s : ė+3kαtr ε, (3.72) h 2 s ( α+ 1 3 ) β2. (3.73) The elastoplastic tangent tensor is derived from σ = D e : ε e = D e : ε D e : ε p = D e : ε N : De : ε D h e : Q (3.74) = (D e De : Q N : D e ) : ε. (3.75) h Using the result above, the elastoplastic constitutive law can be written as σ = D ep : ε, (3.76) where D ep = D e De : Q N : D e (3.77) h = D e 1 h ( 2G 2 6KGα s 2s s+ s δ + 6KGβ ) δ s+9k 2 αβδ δ. (3.78) 2 s 2 s The constitutive equation (3.76) can be separated into deviatoric and hydrostatic parts as follows ( ṡ = 2Gė 2G2 9Kα s ǫ h s 2 s : ė+ )s (3.79) 2G and ṗ = 3K ǫ 3 2KGβ h s ( ) 9Kα s ǫ s : ė+. (3.80) 2G Inverse elastoplastic constitutive equation The inverse of the constitutive law (3.76) is defined as ε = C ep : σ, (3.81) where the fourth-order elastoplastic compliance tangent tensor C ep is obtained by the inversion of 31
106 CHAPTER 3. THEORY OF SMALL STRAIN ELASTOPLASTICITY (3.77) using the Sherman Morrison formula (Sherman and Morrison, 1949; Szabó, 1985): C ep = (D ep ) 1 = C e + 1 Q N (3.82) j = C e + 1 ( 1 j 2 s 2s s+ α ) β s δ + δ s+αβδ δ, (3.83) 2 s 2 s where the scalar parameter j is defined as j = h G 9Kαβ = H ( α+ 1 3 ) β2. (3.84) The inverse constitutive law(3.81) can be separated into deviatoric and hydrostatic part as follows: ė = 1 1 ( 2Gṡ+ 2j s 2 s : ṡ+3 ) 2 s αṗ s (3.85) and ǫ = ( 1 3K + 3αβ ) β(s : ṡ) ṗ+. (3.86) j 2 s j 32
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
3D plasticity. Write 3D equations for inelastic behavior. Georges Cailletaud, Ecole des Mines de Paris, Centre des Matériaux
 3D plasticity 3D viscoplasticity 3D plasticity Perfectly plastic material Direction of plastic flow with various criteria Prandtl-Reuss, Hencky-Mises, Prager rules Write 3D equations for inelastic behavior
3D plasticity 3D viscoplasticity 3D plasticity Perfectly plastic material Direction of plastic flow with various criteria Prandtl-Reuss, Hencky-Mises, Prager rules Write 3D equations for inelastic behavior
Lecture 12: Fundamental Concepts in Structural Plasticity
 Lecture 12: Fundamental Concepts in Structural Plasticity Plastic properties of the material were already introduced briefly earlier in the present notes. The critical slenderness ratio of column is controlled
Lecture 12: Fundamental Concepts in Structural Plasticity Plastic properties of the material were already introduced briefly earlier in the present notes. The critical slenderness ratio of column is controlled
Mechanical Properties - Stresses & Strains
 Mechanical Properties - Stresses & Strains Types of Deformation : Elasic Plastic Anelastic Elastic deformation is defined as instantaneous recoverable deformation Hooke's law : For tensile loading, σ =
Mechanical Properties - Stresses & Strains Types of Deformation : Elasic Plastic Anelastic Elastic deformation is defined as instantaneous recoverable deformation Hooke's law : For tensile loading, σ =
Elasticity Theory Basics
 G22.3033-002: Topics in Computer Graphics: Lecture #7 Geometric Modeling New York University Elasticity Theory Basics Lecture #7: 20 October 2003 Lecturer: Denis Zorin Scribe: Adrian Secord, Yotam Gingold
G22.3033-002: Topics in Computer Graphics: Lecture #7 Geometric Modeling New York University Elasticity Theory Basics Lecture #7: 20 October 2003 Lecturer: Denis Zorin Scribe: Adrian Secord, Yotam Gingold
Technology of EHIS (stamping) applied to the automotive parts production
 applied to the automotive parts production") Laboratory of Applied Mathematics and Mechanics Technology of EHIS (stamping) applied to the automotive parts production Churilova Maria, Saint-Petersburg State Polytechnical University Department of Applied
Laboratory of Applied Mathematics and Mechanics Technology of EHIS (stamping) applied to the automotive parts production Churilova Maria, Saint-Petersburg State Polytechnical University Department of Applied
R&DE (Engineers), DRDO. Theories of Failure. rd_mech@yahoo.co.in. Ramadas Chennamsetti
, DRDO. Theories of Failure. rd_mech@yahoo.co.in. Ramadas Chennamsetti") heories of Failure ummary Maximum rincial stress theory Maximum rincial strain theory Maximum strain energy theory Distortion energy theory Maximum shear stress theory Octahedral stress theory Introduction
heories of Failure ummary Maximum rincial stress theory Maximum rincial strain theory Maximum strain energy theory Distortion energy theory Maximum shear stress theory Octahedral stress theory Introduction
Chapter Outline. Mechanical Properties of Metals How do metals respond to external loads?
 Mechanical Properties of Metals How do metals respond to external loads? Stress and Strain Tension Compression Shear Torsion Elastic deformation Plastic Deformation Yield Strength Tensile Strength Ductility
Mechanical Properties of Metals How do metals respond to external loads? Stress and Strain Tension Compression Shear Torsion Elastic deformation Plastic Deformation Yield Strength Tensile Strength Ductility
Stress Strain Relationships
 Stress Strain Relationships Tensile Testing One basic ingredient in the study of the mechanics of deformable bodies is the resistive properties of materials. These properties relate the stresses to the
Stress Strain Relationships Tensile Testing One basic ingredient in the study of the mechanics of deformable bodies is the resistive properties of materials. These properties relate the stresses to the
State of Stress at Point
 State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
4.3 Results... 27 4.3.1 Drained Conditions... 27 4.3.2 Undrained Conditions... 28 4.4 References... 30 4.5 Data Files... 30 5 Undrained Analysis of
 Table of Contents 1 One Dimensional Compression of a Finite Layer... 3 1.1 Problem Description... 3 1.1.1 Uniform Mesh... 3 1.1.2 Graded Mesh... 5 1.2 Analytical Solution... 6 1.3 Results... 6 1.3.1 Uniform
Table of Contents 1 One Dimensional Compression of a Finite Layer... 3 1.1 Problem Description... 3 1.1.1 Uniform Mesh... 3 1.1.2 Graded Mesh... 5 1.2 Analytical Solution... 6 1.3 Results... 6 1.3.1 Uniform
Mechanical Properties of Metals Mechanical Properties refers to the behavior of material when external forces are applied
 Mechanical Properties of Metals Mechanical Properties refers to the behavior of material when external forces are applied Stress and strain fracture or engineering point of view: allows to predict the
Mechanical Properties of Metals Mechanical Properties refers to the behavior of material when external forces are applied Stress and strain fracture or engineering point of view: allows to predict the
11.1. Objectives. Component Form of a Vector. Component Form of a Vector. Component Form of a Vector. Vectors and the Geometry of Space
 11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
STRAIN ENERGY DENSITY (strain energy per unit volume)
") STRAIN ENERGY DENSITY (strain energy per unit volume) For ductile metals and alloys, according to the Maximum Shear Stress failure theory (aka Tresca ) the only factor that affects dislocation slip is
STRAIN ENERGY DENSITY (strain energy per unit volume) For ductile metals and alloys, according to the Maximum Shear Stress failure theory (aka Tresca ) the only factor that affects dislocation slip is
A vector is a directed line segment used to represent a vector quantity.
 Chapters and 6 Introduction to Vectors A vector quantity has direction and magnitude. There are many examples of vector quantities in the natural world, such as force, velocity, and acceleration. A vector
Chapters and 6 Introduction to Vectors A vector quantity has direction and magnitude. There are many examples of vector quantities in the natural world, such as force, velocity, and acceleration. A vector
1.3. DOT PRODUCT 19. 6. If θ is the angle (between 0 and π) between two non-zero vectors u and v,
 between two non-zero vectors u and v,") 1.3. DOT PRODUCT 19 1.3 Dot Product 1.3.1 Definitions and Properties The dot product is the first way to multiply two vectors. The definition we will give below may appear arbitrary. But it is not. It
1.3. DOT PRODUCT 19 1.3 Dot Product 1.3.1 Definitions and Properties The dot product is the first way to multiply two vectors. The definition we will give below may appear arbitrary. But it is not. It
Finite Element Formulation for Beams - Handout 2 -
 Finite Element Formulation for Beams - Handout 2 - Dr Fehmi Cirak (fc286@) Completed Version Review of Euler-Bernoulli Beam Physical beam model midline Beam domain in three-dimensions Midline, also called
Finite Element Formulation for Beams - Handout 2 - Dr Fehmi Cirak (fc286@) Completed Version Review of Euler-Bernoulli Beam Physical beam model midline Beam domain in three-dimensions Midline, also called
Chapter 22: Electric Flux and Gauss s Law
 22.1 ntroduction We have seen in chapter 21 that determining the electric field of a continuous charge distribution can become very complicated for some charge distributions. t would be desirable if we
22.1 ntroduction We have seen in chapter 21 that determining the electric field of a continuous charge distribution can become very complicated for some charge distributions. t would be desirable if we
13.4 THE CROSS PRODUCT
 710 Chapter Thirteen A FUNDAMENTAL TOOL: VECTORS 62. Use the following steps and the results of Problems 59 60 to show (without trigonometry) that the geometric and algebraic definitions of the dot product
710 Chapter Thirteen A FUNDAMENTAL TOOL: VECTORS 62. Use the following steps and the results of Problems 59 60 to show (without trigonometry) that the geometric and algebraic definitions of the dot product
Torsion Tests. Subjects of interest
 Chapter 10 Torsion Tests Subjects of interest Introduction/Objectives Mechanical properties in torsion Torsional stresses for large plastic strains Type of torsion failures Torsion test vs.tension test
Chapter 10 Torsion Tests Subjects of interest Introduction/Objectives Mechanical properties in torsion Torsional stresses for large plastic strains Type of torsion failures Torsion test vs.tension test
Scalars, Vectors and Tensors
 Scalars, Vectors and Tensors A scalar is a physical quantity that it represented by a dimensional number at a particular point in space and time. Examples are hydrostatic pressure and temperature. A vector
Scalars, Vectors and Tensors A scalar is a physical quantity that it represented by a dimensional number at a particular point in space and time. Examples are hydrostatic pressure and temperature. A vector
Section 9.5: Equations of Lines and Planes
 Lines in 3D Space Section 9.5: Equations of Lines and Planes Practice HW from Stewart Textbook (not to hand in) p. 673 # 3-5 odd, 2-37 odd, 4, 47 Consider the line L through the point P = ( x, y, ) that
Lines in 3D Space Section 9.5: Equations of Lines and Planes Practice HW from Stewart Textbook (not to hand in) p. 673 # 3-5 odd, 2-37 odd, 4, 47 Consider the line L through the point P = ( x, y, ) that
Solid Mechanics. Stress. What you ll learn: Motivation
 Solid Mechanics Stress What you ll learn: What is stress? Why stress is important? What are normal and shear stresses? What is strain? Hooke s law (relationship between stress and strain) Stress strain
Solid Mechanics Stress What you ll learn: What is stress? Why stress is important? What are normal and shear stresses? What is strain? Hooke s law (relationship between stress and strain) Stress strain
Physics 235 Chapter 1. Chapter 1 Matrices, Vectors, and Vector Calculus
 Chapter 1 Matrices, Vectors, and Vector Calculus In this chapter, we will focus on the mathematical tools required for the course. The main concepts that will be covered are: Coordinate transformations
Chapter 1 Matrices, Vectors, and Vector Calculus In this chapter, we will focus on the mathematical tools required for the course. The main concepts that will be covered are: Coordinate transformations
FE-MODELLING OF PC/ABS - EXPERIMENTAL TESTS AND SIMULATIONS
 Division of Solid Mechanics ISRN LUTFD2/TFHF--6/523--SE (-83) FE-MODELLING OF PC/ABS - EXPERIMENTAL TESTS AND SIMULATIONS Master s Dissertation by Fredrik Nordgren and Maria Nyquist Supervisors Vijay Sharan,
Division of Solid Mechanics ISRN LUTFD2/TFHF--6/523--SE (-83) FE-MODELLING OF PC/ABS - EXPERIMENTAL TESTS AND SIMULATIONS Master s Dissertation by Fredrik Nordgren and Maria Nyquist Supervisors Vijay Sharan,
THEORETICAL MECHANICS
 PROF. DR. ING. VASILE SZOLGA THEORETICAL MECHANICS LECTURE NOTES AND SAMPLE PROBLEMS PART ONE STATICS OF THE PARTICLE, OF THE RIGID BODY AND OF THE SYSTEMS OF BODIES KINEMATICS OF THE PARTICLE 2010 0 Contents
PROF. DR. ING. VASILE SZOLGA THEORETICAL MECHANICS LECTURE NOTES AND SAMPLE PROBLEMS PART ONE STATICS OF THE PARTICLE, OF THE RIGID BODY AND OF THE SYSTEMS OF BODIES KINEMATICS OF THE PARTICLE 2010 0 Contents
Dot product and vector projections (Sect. 12.3) There are two main ways to introduce the dot product
 There are two main ways to introduce the dot product") Dot product and vector projections (Sect. 12.3) Two definitions for the dot product. Geometric definition of dot product. Orthogonal vectors. Dot product and orthogonal projections. Properties of the dot
Dot product and vector projections (Sect. 12.3) Two definitions for the dot product. Geometric definition of dot product. Orthogonal vectors. Dot product and orthogonal projections. Properties of the dot
Review of Vector Analysis in Cartesian Coordinates
 R. evicky, CBE 6333 Review of Vector Analysis in Cartesian Coordinates Scalar: A quantity that has magnitude, but no direction. Examples are mass, temperature, pressure, time, distance, and real numbers.
R. evicky, CBE 6333 Review of Vector Analysis in Cartesian Coordinates Scalar: A quantity that has magnitude, but no direction. Examples are mass, temperature, pressure, time, distance, and real numbers.
Deflection Calculation of RC Beams: Finite Element Software Versus Design Code Methods
 Deflection Calculation of RC Beams: Finite Element Software Versus Design Code Methods G. Kaklauskas, Vilnius Gediminas Technical University, 1223 Vilnius, Lithuania (gintaris.kaklauskas@st.vtu.lt) V.
Deflection Calculation of RC Beams: Finite Element Software Versus Design Code Methods G. Kaklauskas, Vilnius Gediminas Technical University, 1223 Vilnius, Lithuania (gintaris.kaklauskas@st.vtu.lt) V.
The Matrix Elements of a 3 3 Orthogonal Matrix Revisited
 Physics 116A Winter 2011 The Matrix Elements of a 3 3 Orthogonal Matrix Revisited 1. Introduction In a class handout entitled, Three-Dimensional Proper and Improper Rotation Matrices, I provided a derivation
Physics 116A Winter 2011 The Matrix Elements of a 3 3 Orthogonal Matrix Revisited 1. Introduction In a class handout entitled, Three-Dimensional Proper and Improper Rotation Matrices, I provided a derivation
University of Maryland Fraternity & Sorority Life Spring 2015 Academic Report
 University of Maryland Fraternity & Sorority Life Academic Report Academic and Population Statistics Population: # of Students: # of New Members: Avg. Size: Avg. GPA: % of the Undergraduate Population
University of Maryland Fraternity & Sorority Life Academic Report Academic and Population Statistics Population: # of Students: # of New Members: Avg. Size: Avg. GPA: % of the Undergraduate Population
Material Damage and Failure
 ABAQUS/Exicit Advanced Topics Lecture 9 Material Damage and Failure ABAQUS/Exicit Advanced Topics L9.2 Overview Progressive Damage and Failure Damage Initiation for Ductile Metals Damage Evolution Element
ABAQUS/Exicit Advanced Topics Lecture 9 Material Damage and Failure ABAQUS/Exicit Advanced Topics L9.2 Overview Progressive Damage and Failure Damage Initiation for Ductile Metals Damage Evolution Element
DAMAGE AND FATIGUE Continuum Damage Mechanics modeling for fatigue of materials and structures. Rodrigue Desmorat
 DAMAGE AND FATIGUE Continuum Damage Mechanics modeling for fatigue of materials and structures Rodrigue Desmorat LMT Cachan ENS Cachan, 61 av. du Pt Wilson 94235 Cachan Cedex desmorat@lmt.ens-cachan.fr
DAMAGE AND FATIGUE Continuum Damage Mechanics modeling for fatigue of materials and structures Rodrigue Desmorat LMT Cachan ENS Cachan, 61 av. du Pt Wilson 94235 Cachan Cedex desmorat@lmt.ens-cachan.fr
 α α λ α = = λ λ α ψ = = α α α λ λ ψ α = + β = > θ θ β > β β θ θ θ β θ β γ θ β = γ θ > β > γ θ β γ = θ β = θ β = θ β = β θ = β β θ = = = β β θ = + α α α α α = = λ λ λ λ λ λ λ = λ λ α α α α λ ψ + α =
α α λ α = = λ λ α ψ = = α α α λ λ ψ α = + β = > θ θ β > β β θ θ θ β θ β γ θ β = γ θ > β > γ θ β γ = θ β = θ β = θ β = β θ = β β θ = = = β β θ = + α α α α α = = λ λ λ λ λ λ λ = λ λ α α α α λ ψ + α =
SOUTH AFRICAN NATIONAL INSTITUTE OF ROCK MECHANICS CHAMBER OF MINES OF SOUTH AFRICA CERTIFICATE IN ROCK MECHANICS PART 1 ROCK MECHANICS THEORY
 SOUTH AFRICAN NATIONAL INSTITUTE OF ROCK MECHANICS CHAMBER OF MINES OF SOUTH AFRICA CERTIFICATE IN ROCK MECHANICS PART 1 ROCK MECHANICS THEORY SYLLABUS Copyright 2006 SANIRE CONTENTS PREAMBLE... 3 TOPICS
SOUTH AFRICAN NATIONAL INSTITUTE OF ROCK MECHANICS CHAMBER OF MINES OF SOUTH AFRICA CERTIFICATE IN ROCK MECHANICS PART 1 ROCK MECHANICS THEORY SYLLABUS Copyright 2006 SANIRE CONTENTS PREAMBLE... 3 TOPICS
A COMBINED EXPERIMENTAL/NUMERICAL METHODOLOGY TO ASSESS THE SENSITIVITY OF PBX's (*)
") A COMBINED EXPERIMENTAL/NUMERICAL METHODOLOGY TO ASSESS THE SENSITIVITY OF PBX's (*) Philippe Chabin, Pierre Brunet, Serge Lécume SNPE Propulsion Centre de Recherches du Bouchet BP 2 97 VertlePetit France
A COMBINED EXPERIMENTAL/NUMERICAL METHODOLOGY TO ASSESS THE SENSITIVITY OF PBX's (*) Philippe Chabin, Pierre Brunet, Serge Lécume SNPE Propulsion Centre de Recherches du Bouchet BP 2 97 VertlePetit France
Chapter 2. Derivation of the Equations of Open Channel Flow. 2.1 General Considerations
 Chapter 2. Derivation of the Equations of Open Channel Flow 2.1 General Considerations Of interest is water flowing in a channel with a free surface, which is usually referred to as open channel flow.
Chapter 2. Derivation of the Equations of Open Channel Flow 2.1 General Considerations Of interest is water flowing in a channel with a free surface, which is usually referred to as open channel flow.
Bending Stress in Beams
 936-73-600 Bending Stress in Beams Derive a relationship for bending stress in a beam: Basic Assumptions:. Deflections are very small with respect to the depth of the beam. Plane sections before bending
936-73-600 Bending Stress in Beams Derive a relationship for bending stress in a beam: Basic Assumptions:. Deflections are very small with respect to the depth of the beam. Plane sections before bending
3D Stress Components. From equilibrium principles: τ xy = τ yx, τ xz = τ zx, τ zy = τ yz. Normal Stresses. Shear Stresses
 3D Stress Components From equilibrium principles:, z z, z z The most general state of stress at a point ma be represented b 6 components Normal Stresses Shear Stresses Normal stress () : the subscript
3D Stress Components From equilibrium principles:, z z, z z The most general state of stress at a point ma be represented b 6 components Normal Stresses Shear Stresses Normal stress () : the subscript
Nonlinear Analysis Using Femap with NX Nastran
 Nonlinear Analysis Using Femap with NX Nastran Chip Fricke, Principal Applications Engineer, Agenda Nonlinear Analysis Using Femap with NX Nastran Who am I? Overview of Nonlinear Analysis Comparison of
Nonlinear Analysis Using Femap with NX Nastran Chip Fricke, Principal Applications Engineer, Agenda Nonlinear Analysis Using Femap with NX Nastran Who am I? Overview of Nonlinear Analysis Comparison of
The elements used in commercial codes can be classified in two basic categories:
 CHAPTER 3 Truss Element 3.1 Introduction The single most important concept in understanding FEA, is the basic understanding of various finite elements that we employ in an analysis. Elements are used for
CHAPTER 3 Truss Element 3.1 Introduction The single most important concept in understanding FEA, is the basic understanding of various finite elements that we employ in an analysis. Elements are used for
University of Thessaly School of Engineering Department of Mechanical Engineering CRYSTAL PLASTICITY
 University of Thessaly School of Engineering Department of Mechanical Engineering Diploma Thesis CRYSTAL PLASTICITY A rate independent constitutive model. The effect of Hydrogen concentration by NIKOLAOS
University of Thessaly School of Engineering Department of Mechanical Engineering Diploma Thesis CRYSTAL PLASTICITY A rate independent constitutive model. The effect of Hydrogen concentration by NIKOLAOS
Unit 6 Plane Stress and Plane Strain
 Unit 6 Plane Stress and Plane Strain Readings: T & G 8, 9, 10, 11, 12, 14, 15, 16 Paul A. Lagace, Ph.D. Professor of Aeronautics & Astronautics and Engineering Systems There are many structural configurations
Unit 6 Plane Stress and Plane Strain Readings: T & G 8, 9, 10, 11, 12, 14, 15, 16 Paul A. Lagace, Ph.D. Professor of Aeronautics & Astronautics and Engineering Systems There are many structural configurations
Program COLANY Stone Columns Settlement Analysis. User Manual
 User Manual 1 CONTENTS SYNOPSIS 3 1. INTRODUCTION 4 2. PROBLEM DEFINITION 4 2.1 Material Properties 2.2 Dimensions 2.3 Units 6 7 7 3. EXAMPLE PROBLEM 8 3.1 Description 3.2 Hand Calculation 8 8 4. COLANY
User Manual 1 CONTENTS SYNOPSIS 3 1. INTRODUCTION 4 2. PROBLEM DEFINITION 4 2.1 Material Properties 2.2 Dimensions 2.3 Units 6 7 7 3. EXAMPLE PROBLEM 8 3.1 Description 3.2 Hand Calculation 8 8 4. COLANY
Objectives. Experimentally determine the yield strength, tensile strength, and modules of elasticity and ductility of given materials.
 Lab 3 Tension Test Objectives Concepts Background Experimental Procedure Report Requirements Discussion Objectives Experimentally determine the yield strength, tensile strength, and modules of elasticity
Lab 3 Tension Test Objectives Concepts Background Experimental Procedure Report Requirements Discussion Objectives Experimentally determine the yield strength, tensile strength, and modules of elasticity
Section 11.1: Vectors in the Plane. Suggested Problems: 1, 5, 9, 17, 23, 25-37, 40, 42, 44, 45, 47, 50
 Section 11.1: Vectors in the Plane Page 779 Suggested Problems: 1, 5, 9, 17, 3, 5-37, 40, 4, 44, 45, 47, 50 Determine whether the following vectors a and b are perpendicular. 5) a = 6, 0, b = 0, 7 Recall
Section 11.1: Vectors in the Plane Page 779 Suggested Problems: 1, 5, 9, 17, 3, 5-37, 40, 4, 44, 45, 47, 50 Determine whether the following vectors a and b are perpendicular. 5) a = 6, 0, b = 0, 7 Recall
A QUICK GUIDE TO THE FORMULAS OF MULTIVARIABLE CALCULUS
 A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
A QUIK GUIDE TO THE FOMULAS OF MULTIVAIABLE ALULUS ontents 1. Analytic Geometry 2 1.1. Definition of a Vector 2 1.2. Scalar Product 2 1.3. Properties of the Scalar Product 2 1.4. Length and Unit Vectors
5 VECTOR GEOMETRY. 5.0 Introduction. Objectives. Activity 1
 5 VECTOR GEOMETRY Chapter 5 Vector Geometry Objectives After studying this chapter you should be able to find and use the vector equation of a straight line; be able to find the equation of a plane in
5 VECTOR GEOMETRY Chapter 5 Vector Geometry Objectives After studying this chapter you should be able to find and use the vector equation of a straight line; be able to find the equation of a plane in
Analysis of Stresses and Strains
 Chapter 7 Analysis of Stresses and Strains 7.1 Introduction axial load = P / A torsional load in circular shaft = T / I p bending moment and shear force in beam = M y / I = V Q / I b in this chapter, we
Chapter 7 Analysis of Stresses and Strains 7.1 Introduction axial load = P / A torsional load in circular shaft = T / I p bending moment and shear force in beam = M y / I = V Q / I b in this chapter, we
Solutions for Review Problems
 olutions for Review Problems 1. Let be the triangle with vertices A (,, ), B (4,, 1) and C (,, 1). (a) Find the cosine of the angle BAC at vertex A. (b) Find the area of the triangle ABC. (c) Find a vector
olutions for Review Problems 1. Let be the triangle with vertices A (,, ), B (4,, 1) and C (,, 1). (a) Find the cosine of the angle BAC at vertex A. (b) Find the area of the triangle ABC. (c) Find a vector
3 Concepts of Stress Analysis
 3 Concepts of Stress Analysis 3.1 Introduction Here the concepts of stress analysis will be stated in a finite element context. That means that the primary unknown will be the (generalized) displacements.
3 Concepts of Stress Analysis 3.1 Introduction Here the concepts of stress analysis will be stated in a finite element context. That means that the primary unknown will be the (generalized) displacements.
Ajit Kumar Patra (Autor) Crystal structure, anisotropy and spin reorientation transition of highly coercive, epitaxial Pr-Co films
 Crystal structure, anisotropy and spin reorientation transition of highly coercive, epitaxial Pr-Co films") Ajit Kumar Patra (Autor) Crystal structure, anisotropy and spin reorientation transition of highly coercive, epitaxial Pr-Co films https://cuvillier.de/de/shop/publications/1306 Copyright: Cuvillier Verlag,
Ajit Kumar Patra (Autor) Crystal structure, anisotropy and spin reorientation transition of highly coercive, epitaxial Pr-Co films https://cuvillier.de/de/shop/publications/1306 Copyright: Cuvillier Verlag,
CAD-BASED DESIGN PROCESS FOR FATIGUE ANALYSIS, RELIABILITY- ANALYSIS, AND DESIGN OPTIMIZATION
 CAD-BASED DESIGN PROCESS FOR FATIGUE ANALYSIS, RELIABILITY- ANALYSIS, AND DESIGN OPTIMIZATION K.K. Choi, V. Ogarevic, J. Tang, and Y.H. Park Center for Computer-Aided Design College of Engineering The
CAD-BASED DESIGN PROCESS FOR FATIGUE ANALYSIS, RELIABILITY- ANALYSIS, AND DESIGN OPTIMIZATION K.K. Choi, V. Ogarevic, J. Tang, and Y.H. Park Center for Computer-Aided Design College of Engineering The
DYNAMIC ANALYSIS OF THICK PLATES SUBJECTED TO EARTQUAKE
 DYNAMIC ANALYSIS OF THICK PLATES SUBJECTED TO EARTQUAKE ÖZDEMİR Y. I, AYVAZ Y. Posta Adresi: Department of Civil Engineering, Karadeniz Technical University, 68 Trabzon, TURKEY E-posta: yaprakozdemir@hotmail.com
DYNAMIC ANALYSIS OF THICK PLATES SUBJECTED TO EARTQUAKE ÖZDEMİR Y. I, AYVAZ Y. Posta Adresi: Department of Civil Engineering, Karadeniz Technical University, 68 Trabzon, TURKEY E-posta: yaprakozdemir@hotmail.com
The derivation of the balance equations
 Chapter 3 The derivation of the balance equations In this chapter we present the derivation of the balance equations for an arbitrary physical quantity which starts from the Liouville equation. We follow,
Chapter 3 The derivation of the balance equations In this chapter we present the derivation of the balance equations for an arbitrary physical quantity which starts from the Liouville equation. We follow,
Math 241, Exam 1 Information.
 Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
Math 241, Exam 1 Information. 9/24/12, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.1-14.3. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241fa12/241.html)
THREE DIMENSIONAL GEOMETRY
 Chapter 8 THREE DIMENSIONAL GEOMETRY 8.1 Introduction In this chapter we present a vector algebra approach to three dimensional geometry. The aim is to present standard properties of lines and planes,
Chapter 8 THREE DIMENSIONAL GEOMETRY 8.1 Introduction In this chapter we present a vector algebra approach to three dimensional geometry. The aim is to present standard properties of lines and planes,
AN EXPLANATION OF JOINT DIAGRAMS
 AN EXPLANATION OF JOINT DIAGRAMS When bolted joints are subjected to external tensile loads, what forces and elastic deformation really exist? The majority of engineers in both the fastener manufacturing
AN EXPLANATION OF JOINT DIAGRAMS When bolted joints are subjected to external tensile loads, what forces and elastic deformation really exist? The majority of engineers in both the fastener manufacturing
Geometric Optics Converging Lenses and Mirrors Physics Lab IV
 Objective Geometric Optics Converging Lenses and Mirrors Physics Lab IV In this set of lab exercises, the basic properties geometric optics concerning converging lenses and mirrors will be explored. The
Objective Geometric Optics Converging Lenses and Mirrors Physics Lab IV In this set of lab exercises, the basic properties geometric optics concerning converging lenses and mirrors will be explored. The
Math Placement Test Practice Problems
 Math Placement Test Practice Problems The following problems cover material that is used on the math placement test to place students into Math 1111 College Algebra, Math 1113 Precalculus, and Math 2211
Math Placement Test Practice Problems The following problems cover material that is used on the math placement test to place students into Math 1111 College Algebra, Math 1113 Precalculus, and Math 2211
EFFICIENT NUMERICAL SIMULATION OF INDUSTRIAL SHEET METAL BENDING PROCESSES
 ECCOMAS Congress 06 VII European Congress on Computational Methods in Applied Sciences and Engineering M. Papadrakakis, V. Papadopoulos, G. Stefanou, V. Plevris (eds.) Crete Island, Greece, 5 0 June 06
ECCOMAS Congress 06 VII European Congress on Computational Methods in Applied Sciences and Engineering M. Papadrakakis, V. Papadopoulos, G. Stefanou, V. Plevris (eds.) Crete Island, Greece, 5 0 June 06
discuss how to describe points, lines and planes in 3 space.
 Chapter 2 3 Space: lines and planes In this chapter we discuss how to describe points, lines and planes in 3 space. introduce the language of vectors. discuss various matters concerning the relative position
Chapter 2 3 Space: lines and planes In this chapter we discuss how to describe points, lines and planes in 3 space. introduce the language of vectors. discuss various matters concerning the relative position
CosmosWorks Centrifugal Loads
 CosmosWorks Centrifugal Loads (Draft 4, May 28, 2006) Introduction This example will look at essentially planar objects subjected to centrifugal loads. That is, loads due to angular velocity and/or angular
CosmosWorks Centrifugal Loads (Draft 4, May 28, 2006) Introduction This example will look at essentially planar objects subjected to centrifugal loads. That is, loads due to angular velocity and/or angular
Nonlinear analysis and form-finding in GSA Training Course
 Nonlinear analysis and form-finding in GSA Training Course Non-linear analysis and form-finding in GSA 1 of 47 Oasys Ltd Non-linear analysis and form-finding in GSA 2 of 47 Using the GSA GsRelax Solver
Nonlinear analysis and form-finding in GSA Training Course Non-linear analysis and form-finding in GSA 1 of 47 Oasys Ltd Non-linear analysis and form-finding in GSA 2 of 47 Using the GSA GsRelax Solver
Electromagnetism - Lecture 2. Electric Fields
 Electromagnetism - Lecture 2 Electric Fields Review of Vector Calculus Differential form of Gauss s Law Poisson s and Laplace s Equations Solutions of Poisson s Equation Methods of Calculating Electric
Electromagnetism - Lecture 2 Electric Fields Review of Vector Calculus Differential form of Gauss s Law Poisson s and Laplace s Equations Solutions of Poisson s Equation Methods of Calculating Electric
Essential Mathematics for Computer Graphics fast
 John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
Group Theory and Chemistry
 Group Theory and Chemistry Outline: Raman and infra-red spectroscopy Symmetry operations Point Groups and Schoenflies symbols Function space and matrix representation Reducible and irreducible representation
Group Theory and Chemistry Outline: Raman and infra-red spectroscopy Symmetry operations Point Groups and Schoenflies symbols Function space and matrix representation Reducible and irreducible representation
9 Multiplication of Vectors: The Scalar or Dot Product
 Arkansas Tech University MATH 934: Calculus III Dr. Marcel B Finan 9 Multiplication of Vectors: The Scalar or Dot Product Up to this point we have defined what vectors are and discussed basic notation
Arkansas Tech University MATH 934: Calculus III Dr. Marcel B Finan 9 Multiplication of Vectors: The Scalar or Dot Product Up to this point we have defined what vectors are and discussed basic notation
Solutions to old Exam 1 problems
 Solutions to old Exam 1 problems Hi students! I am putting this old version of my review for the first midterm review, place and time to be announced. Check for updates on the web site as to which sections
Solutions to old Exam 1 problems Hi students! I am putting this old version of my review for the first midterm review, place and time to be announced. Check for updates on the web site as to which sections
Mechanics of Materials Summary
 Mechanics of Materials Summary 1. Stresses and Strains 1.1 Normal Stress Let s consider a fixed rod. This rod has length L. Its cross-sectional shape is constant and has area. Figure 1.1: rod with a normal
Mechanics of Materials Summary 1. Stresses and Strains 1.1 Normal Stress Let s consider a fixed rod. This rod has length L. Its cross-sectional shape is constant and has area. Figure 1.1: rod with a normal
Fluid Mechanics: Static s Kinematics Dynamics Fluid
 Fluid Mechanics: Fluid mechanics may be defined as that branch of engineering science that deals with the behavior of fluid under the condition of rest and motion Fluid mechanics may be divided into three
Fluid Mechanics: Fluid mechanics may be defined as that branch of engineering science that deals with the behavior of fluid under the condition of rest and motion Fluid mechanics may be divided into three
LINEAR ALGEBRA W W L CHEN
 LINEAR ALGEBRA W W L CHEN c W W L Chen, 1982, 2008. This chapter originates from material used by author at Imperial College, University of London, between 1981 and 1990. It is available free to all individuals,
LINEAR ALGEBRA W W L CHEN c W W L Chen, 1982, 2008. This chapter originates from material used by author at Imperial College, University of London, between 1981 and 1990. It is available free to all individuals,
ANALYTICAL AND EXPERIMENTAL EVALUATION OF SPRING BACK EFFECTS IN A TYPICAL COLD ROLLED SHEET
 International Journal of Mechanical Engineering and Technology (IJMET) Volume 7, Issue 1, Jan-Feb 2016, pp. 119-130, Article ID: IJMET_07_01_013 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=7&itype=1
International Journal of Mechanical Engineering and Technology (IJMET) Volume 7, Issue 1, Jan-Feb 2016, pp. 119-130, Article ID: IJMET_07_01_013 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=7&itype=1
2. Illustration of the Nikkei 225 option data
 1. Introduction 2. Illustration of the Nikkei 225 option data 2.1 A brief outline of the Nikkei 225 options market τ 2.2 Estimation of the theoretical price τ = + ε ε = = + ε + = + + + = + ε + ε + ε =
1. Introduction 2. Illustration of the Nikkei 225 option data 2.1 A brief outline of the Nikkei 225 options market τ 2.2 Estimation of the theoretical price τ = + ε ε = = + ε + = + + + = + ε + ε + ε =
σ y ( ε f, σ f ) ( ε f
 ( ε f") Typical stress-strain curves for mild steel and aluminum alloy from tensile tests L L( 1 + ε) A = --- A u u 0 1 E l mild steel fracture u ( ε f, f ) ( ε f, f ) ε 0 ε 0.2 = 0.002 aluminum alloy fracture
Typical stress-strain curves for mild steel and aluminum alloy from tensile tests L L( 1 + ε) A = --- A u u 0 1 E l mild steel fracture u ( ε f, f ) ( ε f, f ) ε 0 ε 0.2 = 0.002 aluminum alloy fracture
Physics 53. Kinematics 2. Our nature consists in movement; absolute rest is death. Pascal
 Phsics 53 Kinematics 2 Our nature consists in movement; absolute rest is death. Pascal Velocit and Acceleration in 3-D We have defined the velocit and acceleration of a particle as the first and second
Phsics 53 Kinematics 2 Our nature consists in movement; absolute rest is death. Pascal Velocit and Acceleration in 3-D We have defined the velocit and acceleration of a particle as the first and second
11. Rotation Translational Motion: Rotational Motion:
 11. Rotation Translational Motion: Motion of the center of mass of an object from one position to another. All the motion discussed so far belongs to this category, except uniform circular motion. Rotational
11. Rotation Translational Motion: Motion of the center of mass of an object from one position to another. All the motion discussed so far belongs to this category, except uniform circular motion. Rotational
Unit 3 (Review of) Language of Stress/Strain Analysis
 Language of Stress/Strain Analysis") Unit 3 (Review of) Language of Stress/Strain Analysis Readings: B, M, P A.2, A.3, A.6 Rivello 2.1, 2.2 T & G Ch. 1 (especially 1.7) Paul A. Lagace, Ph.D. Professor of Aeronautics & Astronautics and Engineering
Unit 3 (Review of) Language of Stress/Strain Analysis Readings: B, M, P A.2, A.3, A.6 Rivello 2.1, 2.2 T & G Ch. 1 (especially 1.7) Paul A. Lagace, Ph.D. Professor of Aeronautics & Astronautics and Engineering
Solutions to Exercises, Section 5.1
 Instructor s Solutions Manual, Section 5.1 Exercise 1 Solutions to Exercises, Section 5.1 1. Find all numbers t such that ( 1 3,t) is a point on the unit circle. For ( 1 3,t)to be a point on the unit circle
Instructor s Solutions Manual, Section 5.1 Exercise 1 Solutions to Exercises, Section 5.1 1. Find all numbers t such that ( 1 3,t) is a point on the unit circle. For ( 1 3,t)to be a point on the unit circle
Linear algebra and the geometry of quadratic equations. Similarity transformations and orthogonal matrices
 MATH 30 Differential Equations Spring 006 Linear algebra and the geometry of quadratic equations Similarity transformations and orthogonal matrices First, some things to recall from linear algebra Two
MATH 30 Differential Equations Spring 006 Linear algebra and the geometry of quadratic equations Similarity transformations and orthogonal matrices First, some things to recall from linear algebra Two
Classification of Fingerprints. Sarat C. Dass Department of Statistics & Probability
 Classification of Fingerprints Sarat C. Dass Department of Statistics & Probability Fingerprint Classification Fingerprint classification is a coarse level partitioning of a fingerprint database into smaller
Classification of Fingerprints Sarat C. Dass Department of Statistics & Probability Fingerprint Classification Fingerprint classification is a coarse level partitioning of a fingerprint database into smaller
TWO-DIMENSIONAL TRANSFORMATION
 CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
8.2 Elastic Strain Energy
 Section 8. 8. Elastic Strain Energy The strain energy stored in an elastic material upon deformation is calculated below for a number of different geometries and loading conditions. These expressions for
Section 8. 8. Elastic Strain Energy The strain energy stored in an elastic material upon deformation is calculated below for a number of different geometries and loading conditions. These expressions for
Lecture 12: Heterogeneous Nucleation: a surface catalyzed process
 Lecture 1: Heterogeneous Nucleation: a surface catalyzed process Today s topics What is heterogeneous nucleation? What implied in real practice of materials processing and phase transformation? Heterogeneous
Lecture 1: Heterogeneous Nucleation: a surface catalyzed process Today s topics What is heterogeneous nucleation? What implied in real practice of materials processing and phase transformation? Heterogeneous
CH 6: Fatigue Failure Resulting from Variable Loading
 CH 6: Fatigue Failure Resulting from Variable Loading Some machine elements are subjected to static loads and for such elements static failure theories are used to predict failure (yielding or fracture).
CH 6: Fatigue Failure Resulting from Variable Loading Some machine elements are subjected to static loads and for such elements static failure theories are used to predict failure (yielding or fracture).
Laterally Loaded Piles
 Laterally Loaded Piles 1 Soil Response Modelled by p-y Curves In order to properly analyze a laterally loaded pile foundation in soil/rock, a nonlinear relationship needs to be applied that provides soil
Laterally Loaded Piles 1 Soil Response Modelled by p-y Curves In order to properly analyze a laterally loaded pile foundation in soil/rock, a nonlinear relationship needs to be applied that provides soil
Metric Spaces. Chapter 7. 7.1. Metrics
 Chapter 7 Metric Spaces A metric space is a set X that has a notion of the distance d(x, y) between every pair of points x, y X. The purpose of this chapter is to introduce metric spaces and give some
Chapter 7 Metric Spaces A metric space is a set X that has a notion of the distance d(x, y) between every pair of points x, y X. The purpose of this chapter is to introduce metric spaces and give some
α = u v. In other words, Orthogonal Projection
 Orthogonal Projection Given any nonzero vector v, it is possible to decompose an arbitrary vector u into a component that points in the direction of v and one that points in a direction orthogonal to v
Orthogonal Projection Given any nonzero vector v, it is possible to decompose an arbitrary vector u into a component that points in the direction of v and one that points in a direction orthogonal to v
Numerical Analysis of Cohesive Crack Growth Using Extended Finite Element Method (X-FEM)
") Ecole Centrale de Nantes (ECN) Institut de Recherche en Génie Civil et Méchanique (GeM) The International Center for Numerical Methods in Engineering (CIMNE) Master of Science Thesis Numerical Analysis
Ecole Centrale de Nantes (ECN) Institut de Recherche en Génie Civil et Méchanique (GeM) The International Center for Numerical Methods in Engineering (CIMNE) Master of Science Thesis Numerical Analysis
Concepts in Calculus III
 Concepts in Calculus III Beta Version UNIVERSITY PRESS OF FLORIDA Florida A&M University, Tallahassee Florida Atlantic University, Boca Raton Florida Gulf Coast University, Ft. Myers Florida International
Concepts in Calculus III Beta Version UNIVERSITY PRESS OF FLORIDA Florida A&M University, Tallahassee Florida Atlantic University, Boca Raton Florida Gulf Coast University, Ft. Myers Florida International
Solved with COMSOL Multiphysics 4.3
 Vibrating String Introduction In the following example you compute the natural frequencies of a pre-tensioned string using the 2D Truss interface. This is an example of stress stiffening ; in fact the
Vibrating String Introduction In the following example you compute the natural frequencies of a pre-tensioned string using the 2D Truss interface. This is an example of stress stiffening ; in fact the
Lap Fillet Weld Calculations and FEA Techniques
 Lap Fillet Weld Calculations and FEA Techniques By: MS.ME Ahmad A. Abbas Sr. Analysis Engineer Ahmad.Abbas@AdvancedCAE.com www.advancedcae.com Sunday, July 11, 2010 Advanced CAE All contents Copyright
Lap Fillet Weld Calculations and FEA Techniques By: MS.ME Ahmad A. Abbas Sr. Analysis Engineer Ahmad.Abbas@AdvancedCAE.com www.advancedcae.com Sunday, July 11, 2010 Advanced CAE All contents Copyright
METU DEPARTMENT OF METALLURGICAL AND MATERIALS ENGINEERING
 METU DEPARTMENT OF METALLURGICAL AND MATERIALS ENGINEERING Met E 206 MATERIALS LABORATORY EXPERIMENT 1 Prof. Dr. Rıza GÜRBÜZ Res. Assist. Gül ÇEVİK (Room: B-306) INTRODUCTION TENSION TEST Mechanical testing
METU DEPARTMENT OF METALLURGICAL AND MATERIALS ENGINEERING Met E 206 MATERIALS LABORATORY EXPERIMENT 1 Prof. Dr. Rıza GÜRBÜZ Res. Assist. Gül ÇEVİK (Room: B-306) INTRODUCTION TENSION TEST Mechanical testing
Reflection and Refraction
 Equipment Reflection and Refraction Acrylic block set, plane-concave-convex universal mirror, cork board, cork board stand, pins, flashlight, protractor, ruler, mirror worksheet, rectangular block worksheet,
Equipment Reflection and Refraction Acrylic block set, plane-concave-convex universal mirror, cork board, cork board stand, pins, flashlight, protractor, ruler, mirror worksheet, rectangular block worksheet,
3 Orthogonal Vectors and Matrices
 3 Orthogonal Vectors and Matrices The linear algebra portion of this course focuses on three matrix factorizations: QR factorization, singular valued decomposition (SVD), and LU factorization The first
3 Orthogonal Vectors and Matrices The linear algebra portion of this course focuses on three matrix factorizations: QR factorization, singular valued decomposition (SVD), and LU factorization The first
Practice Final Math 122 Spring 12 Instructor: Jeff Lang
 Practice Final Math Spring Instructor: Jeff Lang. Find the limit of the sequence a n = ln (n 5) ln (3n + 8). A) ln ( ) 3 B) ln C) ln ( ) 3 D) does not exist. Find the limit of the sequence a n = (ln n)6
Practice Final Math Spring Instructor: Jeff Lang. Find the limit of the sequence a n = ln (n 5) ln (3n + 8). A) ln ( ) 3 B) ln C) ln ( ) 3 D) does not exist. Find the limit of the sequence a n = (ln n)6
Lecture 2: Homogeneous Coordinates, Lines and Conics
 Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
Structural Axial, Shear and Bending Moments
 Structural Axial, Shear and Bending Moments Positive Internal Forces Acting Recall from mechanics of materials that the internal forces P (generic axial), V (shear) and M (moment) represent resultants
Structural Axial, Shear and Bending Moments Positive Internal Forces Acting Recall from mechanics of materials that the internal forces P (generic axial), V (shear) and M (moment) represent resultants
Finite Element Formulation for Plates - Handout 3 -
 Finite Element Formulation for Plates - Handout 3 - Dr Fehmi Cirak (fc286@) Completed Version Definitions A plate is a three dimensional solid body with one of the plate dimensions much smaller than the
Finite Element Formulation for Plates - Handout 3 - Dr Fehmi Cirak (fc286@) Completed Version Definitions A plate is a three dimensional solid body with one of the plate dimensions much smaller than the
Outline Lagrangian Constraints and Image Quality Models
 Remarks on Lagrangian singularities, caustics, minimum distance lines Department of Mathematics and Statistics Queen s University CRM, Barcelona, Spain June 2014 CRM CRM, Barcelona, SpainJune 2014 CRM
Remarks on Lagrangian singularities, caustics, minimum distance lines Department of Mathematics and Statistics Queen s University CRM, Barcelona, Spain June 2014 CRM CRM, Barcelona, SpainJune 2014 CRM
TOPIC 4: DERIVATIVES
 TOPIC 4: DERIVATIVES 1. The derivative of a function. Differentiation rules 1.1. The slope of a curve. The slope of a curve at a point P is a measure of the steepness of the curve. If Q is a point on the
TOPIC 4: DERIVATIVES 1. The derivative of a function. Differentiation rules 1.1. The slope of a curve. The slope of a curve at a point P is a measure of the steepness of the curve. If Q is a point on the