Advances in the Design of the icub Humanoid Robot: Force Control and Tactile Sensing
|
|
|
- Trevor Shaw
- 8 years ago
- Views:
Transcription
1 Advances in the Design of the icub Humanoid Robot: Force Control and Tactile Sensing Bled, Slovenia October 26 th, 2011 Giorgio Metta, Ugo Pattacini, Andrea Del Prete, Marco Randazzo, Alberto Parmiggiani, Serena Ivaldi, Matteo Fumagalli, Marco Maggiali, Lorenzo Natale, Francesco Nori, Giulio Sandini Cognitive Humanoids Laboratory Robotics, Brain and Cognitive Sciences dept. the Italian Institute of Technology

2 what are we looking for? the focus of our research is in the implementation of biologically sound models of cognition in robots of humanoid shape this has the two-fold aim of: furthering our understanding of brain functions realizing robot controllers that can learn and adapt from their mistakes

3 we set up to reach our goals by designing a humanoid robot platform, namely the icub making it the platform of choice for researchers in artificial cognitive systems studying cognition from a developmental perspective (neuroscience)

4 icub is an open source international endeavour initially funded by the EU project RobotCub a full humanoid robot is 104cm, weighs 22 kg has 53 degrees of freedom can crawl, sit and manipulate open design as LGPL/GPL

5 why is the icub so special (for us)? hands: we started the design from the hands 5 fingers, 9 degrees of freedom, 19 joints sensors: human-like, e.g. no lasers cameras, microphones, gyros, encoders, force, tactile electronics: flexibility for research custom electronics, small, programmable (DSP) reproducible platform: community designed reproducible & maintainable yet evolvable platform

6
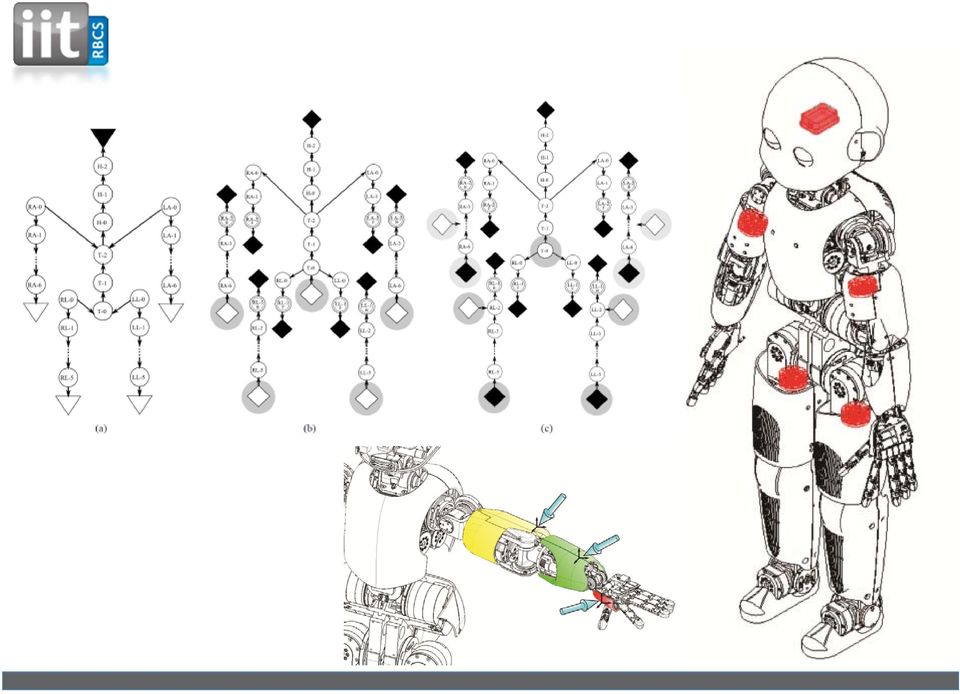
7 force/torque control on the icub joint torque sensors pros: direct feedback loop cons: requires mechanical re-design six-axis F/T sensors pros: scalability, full perception cons: computational delays

8 icub sensorization

9 0

10
11 Test of the dynamical model

12

13 icub 2.0 new mechanics compliant actuators force/torque measurements

14 icub sensorization new icub arm: integrated joint torque sensor on majors joints: shouder (3 DoF) + elbow (1 DoF) Shoulder roll Shoulder pitch Elbow semiconductor strain gauges (SSGs)

15 icub Hardware: elbow joint Elbow (1DOF): 2 SSGs configured as an half Wheatstone bridge.. Calibration: elbow c1 ( s1 o1)

16 icub Hardware: shoulder roll Shoulder (3 DOF): Shoulder Roll: 4 SSGs configured as two half Wheatstone bridges.. Calibration: roll c2 ( s2 o2) c3 ( s3 o3)

17 icub Hardware: shoulder pitch Shoulder (3 DOF): Shoulder Pitch: 4 SSGs mounted directly on an hollow motor shaft..coupling with the shoulder roll: T T m T j T 0 1/ r 1/ r 0 0 1/ r Calibration: pitch c ( s o ) c ( s o ) roll
 c ( s o ) 4 4 4 5")
18 icub Hardware: shoulder yaw Shoulder (3 DOF): Shoulder Yaw: No additional joint torque sensors required. The joint torque is obtained through the direct measurements of the six axis F/T sensor. X Z Y. No calibration is required (the F/T sensor is already calibrated): yaw F y d T z

19 joint torque sensors

20 experiments and model validation static configuration: an additional six axis F/T sensor is placed at the end effector to measures the external wrenches w e in this experiment we consider the following quantities: joint torques measured by the joint torque sensors: t j joint torques computed from the arm F/T sensor: t FT joint torques estimated thought the additional F/T sensor located at the end effector: t e =J T w e joint torques predicted by the arm model (no external forces): t m additional F/T sensor at the end-effector Joint 0 Joint 1 Joint 2 Joint 3 E(τ j -τ ft ) Nm Nm Nm Nm σ(τ j -τ ft ) Nm Nm Nm Nm E(τ j -(τ m +τ e )) Nm Nm Nm Nm σ(τ j -(τ m +τ e )) Nm Nm Nm Nm
 0.127 Nm -0.049 Nm -0.002 Nm -0.032 Nm σ(τ j -τ ft ) 0.186 Nm 0.131 Nm 0.013 Nm 0.042 Nm E(τ j -(τ m +τ e )) 0.075 Nm -0.098 Nm -0.006 Nm 0.006 Nm σ(τ j -(τ m +τ e )) 0.191 Nm 0.173 Nm 0.")
21 experiments and model validation representation of the external wrenches: the arm FT sensor allows to retrieve also the external wrench at the end effector. w e : the external wrenches measured by the additional F/T sensor at the end-effector w FT : the external wrenches computed using the arm F/T sensor remarks: it is not possible to estimate the externally applied wrenches w e ϵ R 6 using the only measurements of joint torques t j ϵ R 4 joint torques are effected by the null space of the Jacobian F 1 (N) F 2 (N) F 3 (N) μ 1 (Nm) μ 2 (Nm) μ 3 (Nm) E(w e -w FT ) σ(w e -w FT )
22 force/torque control on the icub icub 2.0
23 skin principle lots of sensing points structure of the skin
24 fingertips capacitive pressure sensor with 12 sensitive zones 14.5 mm long and 13 mm wide, sized for icub embedded electronics: twelve 16 bit measurements of capacitance either all 12 taxels independently at 50 Hz or an average of the 12 taxels at about 500 Hz
25
26
27 touch
28
29 some philosophy to conclude why open (source) platforms? repeatable experiments benchmarking quality this also resonates with industry-grade R&D in robotics
30 sponsors EU Commission projects: RobotCub, grant FP , CHRIS, grant FP , ITALK, grant FP , Poeticon, grant FP Robotdoc, grant FP7-ITN Roboskin, grant FP Xperience, grant FP EFAA, grant FP More information:
PhD Student Marco Maggiali
 PhD Student Marco Maggiali MAC-HAND Four fingered hand Twelve degrees of freedom (DOF) Tendons driven (4 for each finger) Absolute Position Sensors Force Sensors Tactile Sensors MAC-HAND Architecture Supervisor
PhD Student Marco Maggiali MAC-HAND Four fingered hand Twelve degrees of freedom (DOF) Tendons driven (4 for each finger) Absolute Position Sensors Force Sensors Tactile Sensors MAC-HAND Architecture Supervisor
Autonomous Mobile Robot-I
 Autonomous Mobile Robot-I Sabastian, S.E and Ang, M. H. Jr. Department of Mechanical Engineering National University of Singapore 21 Lower Kent Ridge Road, Singapore 119077 ABSTRACT This report illustrates
Autonomous Mobile Robot-I Sabastian, S.E and Ang, M. H. Jr. Department of Mechanical Engineering National University of Singapore 21 Lower Kent Ridge Road, Singapore 119077 ABSTRACT This report illustrates
PhD Program in Bioengineering and Robotics
 PhD Program in Bioengineering and Robotics Curriculum Robotics and Autonomous Systems Research themes 1. ADVANCED AUTONOMY AND COOPERATION FOR UNMANNED MARINE SYSTEMS... 2 2. BIOLOGICALLY INSPIRED APPROACHES
PhD Program in Bioengineering and Robotics Curriculum Robotics and Autonomous Systems Research themes 1. ADVANCED AUTONOMY AND COOPERATION FOR UNMANNED MARINE SYSTEMS... 2 2. BIOLOGICALLY INSPIRED APPROACHES
UOM Robotics and Industrial Automation Laboratory
 UOM Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, RIAL Mission o to be a Centre of Excellence in Malta for research, development, teaching and outreach
UOM Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, RIAL Mission o to be a Centre of Excellence in Malta for research, development, teaching and outreach
Force/position control of a robotic system for transcranial magnetic stimulation
 Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
Unit 1: INTRODUCTION TO ADVANCED ROBOTIC DESIGN & ENGINEERING
 Unit 1: INTRODUCTION TO ADVANCED ROBOTIC DESIGN & ENGINEERING Technological Literacy Review of Robotics I Topics and understand and be able to implement the "design 8.1, 8.2 Technology Through the Ages
Unit 1: INTRODUCTION TO ADVANCED ROBOTIC DESIGN & ENGINEERING Technological Literacy Review of Robotics I Topics and understand and be able to implement the "design 8.1, 8.2 Technology Through the Ages
ROBOT END EFFECTORS SCRIPT
 Slide 1 Slide 2 Slide 3 Slide 4 An end effector is the business end of a robot or where the work occurs. It is the device that is designed to allow the robot to interact with its environment. Similar in
Slide 1 Slide 2 Slide 3 Slide 4 An end effector is the business end of a robot or where the work occurs. It is the device that is designed to allow the robot to interact with its environment. Similar in
Véronique PERDEREAU ISIR UPMC 6 mars 2013
 Véronique PERDEREAU ISIR UPMC mars 2013 Conventional methods applied to rehabilitation robotics Véronique Perdereau 2 Reference Robot force control by Bruno Siciliano & Luigi Villani Kluwer Academic Publishers
Véronique PERDEREAU ISIR UPMC mars 2013 Conventional methods applied to rehabilitation robotics Véronique Perdereau 2 Reference Robot force control by Bruno Siciliano & Luigi Villani Kluwer Academic Publishers
Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors
 Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
Discussion 2 Android science. Appearance or behavior
 Discussion 2 Android science Appearance or behavior 1 Two evaluation methods Bottom up Incrementally add elemental behaviors and check the effect in each step Top down Develop an android robot which looks
Discussion 2 Android science Appearance or behavior 1 Two evaluation methods Bottom up Incrementally add elemental behaviors and check the effect in each step Top down Develop an android robot which looks
INTRODUCTION TO ROBOTICS. Dr. Bob Williams, williar4@ohio.edu, Ohio University
 INTRODUCTION TO ROBOTICS Dr. Bob Williams, williar4@ohio.edu, Ohio University History Leonardo da Vinci created many robot-like sketches and designs in the 1500 s. The word robot first appeared in print
INTRODUCTION TO ROBOTICS Dr. Bob Williams, williar4@ohio.edu, Ohio University History Leonardo da Vinci created many robot-like sketches and designs in the 1500 s. The word robot first appeared in print
Design of a six Degree-of-Freedom Articulated Robotic Arm for Manufacturing Electrochromic Nanofilms
 Abstract Design of a six Degree-of-Freedom Articulated Robotic Arm for Manufacturing Electrochromic Nanofilms by Maxine Emerich Advisor: Dr. Scott Pierce The subject of this report is the development of
Abstract Design of a six Degree-of-Freedom Articulated Robotic Arm for Manufacturing Electrochromic Nanofilms by Maxine Emerich Advisor: Dr. Scott Pierce The subject of this report is the development of
arxiv:1410.0885v2 [cs.ro] 17 Oct 2014
![arxiv:1410.0885v2 [cs.ro] 17 Oct 2014](/thumbs/39/19907594.jpg "arxiv:1410.0885v2 [cs.ro] 17 Oct 2014") In Situ Calibration of Six-Axis Force-Torque Sensors using Accelerometer Measurements* Silvio Traversaro and Daniele Pucci and Francesco Nori arxiv:141.885v2 [cs.ro] 17 Oct 214 Abstract This paper proposes
In Situ Calibration of Six-Axis Force-Torque Sensors using Accelerometer Measurements* Silvio Traversaro and Daniele Pucci and Francesco Nori arxiv:141.885v2 [cs.ro] 17 Oct 214 Abstract This paper proposes
Pneumatically Driven Robot System with Force Perception for Minimally Invasive Surgery
 Pneumatically Driven Robot System with Force Perception for Minimally Invasive Surgery Tokyo Institute of Technology Kotaro Tadano Daisuke Haraguchi Kenji Kawashima Research Overview on Surgical Robots
Pneumatically Driven Robot System with Force Perception for Minimally Invasive Surgery Tokyo Institute of Technology Kotaro Tadano Daisuke Haraguchi Kenji Kawashima Research Overview on Surgical Robots
Intelligent Robotics Lab.
 1 Variable Stiffness Actuation based on Dual Actuators Connected in Series and Parallel Prof. Jae-Bok Song (jbsong@korea.ac.kr ). (http://robotics.korea.ac.kr) ti k Depart. of Mechanical Engineering, Korea
1 Variable Stiffness Actuation based on Dual Actuators Connected in Series and Parallel Prof. Jae-Bok Song (jbsong@korea.ac.kr ). (http://robotics.korea.ac.kr) ti k Depart. of Mechanical Engineering, Korea
Design of a Robotic Arm with Gripper & End Effector for Spot Welding
 Universal Journal of Mechanical Engineering 1(3): 92-97, 2013 DOI: 10.13189/ujme.2013.010303 http://www.hrpub.org Design of a Robotic Arm with Gripper & End Effector for Spot Welding Puran Singh *, Anil
Universal Journal of Mechanical Engineering 1(3): 92-97, 2013 DOI: 10.13189/ujme.2013.010303 http://www.hrpub.org Design of a Robotic Arm with Gripper & End Effector for Spot Welding Puran Singh *, Anil
FRC WPI Robotics Library Overview
 FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
Shadow Dexterous Hand E1 Series (E1M3R, E1M3L, E1P1R, E1P1L) Technical Specification Release: 1 January 2013
 Technical Specification Release: 1 January 2013") Shadow Dexterous Hand E1 Series (E1M3R, E1M3L, E1P1R, E1P1L) Technical Specification Release: 1 January 213 1/14 Table of Contents 1 Overview... 4 2 Mechanical Profile... 5 2.1 Dimensions... 5 2.1.1 Motor
Shadow Dexterous Hand E1 Series (E1M3R, E1M3L, E1P1R, E1P1L) Technical Specification Release: 1 January 213 1/14 Table of Contents 1 Overview... 4 2 Mechanical Profile... 5 2.1 Dimensions... 5 2.1.1 Motor
Multi-sensor and prediction fusion for contact detection and localization
 Multi-sensor and prediction fusion for contact detection and localization Javier Felip, Antonio Morales and Tamim Asfour Abstract Robot perception of physical interaction with the world can be achieved
Multi-sensor and prediction fusion for contact detection and localization Javier Felip, Antonio Morales and Tamim Asfour Abstract Robot perception of physical interaction with the world can be achieved
Force and Visual Control for Safe Human Robot Interaction
 Force and Visual Control for Safe Human Robot Interaction Bruno SICILIANO www.prisma.unina.it PRISMA Team Force and Visual Control for Safe Human Robot Interaction 2/35 Bruno Siciliano Luigi Villani Vincenzo
Force and Visual Control for Safe Human Robot Interaction Bruno SICILIANO www.prisma.unina.it PRISMA Team Force and Visual Control for Safe Human Robot Interaction 2/35 Bruno Siciliano Luigi Villani Vincenzo
Universal Exoskeleton Arm Design for Rehabilitation
 Journal of Automation and Control Engineering Vol. 3, No. 6, December 215 Universal Exoskeleton Arm Design for Rehabilitation Siam Charoenseang and Sarut Panjan Institute of Field Robotics, King Mongkut
Journal of Automation and Control Engineering Vol. 3, No. 6, December 215 Universal Exoskeleton Arm Design for Rehabilitation Siam Charoenseang and Sarut Panjan Institute of Field Robotics, King Mongkut
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
FDM for Robotic End of Arm Tooling
 STRATASYS.COM OVERVIEW Robots are used to perform tasks such as sorting, transporting, palletizing, inspecting and machining. A robot s end of arm tool (EOAT), also called an end-effector, is selected
STRATASYS.COM OVERVIEW Robots are used to perform tasks such as sorting, transporting, palletizing, inspecting and machining. A robot s end of arm tool (EOAT), also called an end-effector, is selected
Design Aspects of Robot Manipulators
 Design Aspects of Robot Manipulators Dr. Rohan Munasinghe Dept of Electronic and Telecommunication Engineering University of Moratuwa System elements Manipulator (+ proprioceptive sensors) End-effector
Design Aspects of Robot Manipulators Dr. Rohan Munasinghe Dept of Electronic and Telecommunication Engineering University of Moratuwa System elements Manipulator (+ proprioceptive sensors) End-effector
Scooter, 3 wheeled cobot North Western University. PERCRO Exoskeleton
 Scooter, 3 wheeled cobot North Western University A cobot is a robot for direct physical interaction with a human operator, within a shared workspace PERCRO Exoskeleton Unicycle cobot the simplest possible
Scooter, 3 wheeled cobot North Western University A cobot is a robot for direct physical interaction with a human operator, within a shared workspace PERCRO Exoskeleton Unicycle cobot the simplest possible
Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen 2004
 Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen, National Instruments Pittcon 2004 As more control and verification is needed in medical
Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen, National Instruments Pittcon 2004 As more control and verification is needed in medical
Development of Robotic End-Effector Using Sensors for Part Recognition and Grasping
 International Journal of Materials Science and Engineering Vol. 3, No. 1 March 2015 Development of Robotic End-Effector Using Sensors for Part Recognition and Grasping Om Prakash Sahu, Bibhuti Bhusan Biswal,
International Journal of Materials Science and Engineering Vol. 3, No. 1 March 2015 Development of Robotic End-Effector Using Sensors for Part Recognition and Grasping Om Prakash Sahu, Bibhuti Bhusan Biswal,
CIM Computer Integrated Manufacturing
 INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
An inertial haptic interface for robotic applications
 An inertial haptic interface for robotic applications Students: Andrea Cirillo Pasquale Cirillo Advisor: Ing. Salvatore Pirozzi Altera Innovate Italy Design Contest 2012 Objective Build a Low Cost Interface
An inertial haptic interface for robotic applications Students: Andrea Cirillo Pasquale Cirillo Advisor: Ing. Salvatore Pirozzi Altera Innovate Italy Design Contest 2012 Objective Build a Low Cost Interface
Industrial Robotics. Training Objective
 Training Objective After watching the program and reviewing this printed material, the viewer will learn the basics of industrial robot technology and how robots are used in a variety of manufacturing
Training Objective After watching the program and reviewing this printed material, the viewer will learn the basics of industrial robot technology and how robots are used in a variety of manufacturing
Robot coined by Karel Capek in a 1921 science-fiction Czech play
 Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
A REVIEW ON IMPORTANCE OF UNIVERSAL GRIPPER IN INDUSTRIAL ROBOT APPLICATIONS
 Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013 Research Paper ISSN 2278 0149 www.ijmerr.com Vol. 2, No. 2, April 2013 2013 IJMERR. All Rights Reserved A
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013 Research Paper ISSN 2278 0149 www.ijmerr.com Vol. 2, No. 2, April 2013 2013 IJMERR. All Rights Reserved A
CIS009-2, Mechatronics Robotic Arms & Hands
 CIS009-2, Robotic Arms & Hands Bedfordshire 06 th December 2012 Outline Bedfordshire 47 1 2 3 Considering design specifications 4 Bedfordshire 47 Robots are designed for specific purposes. For this reason
CIS009-2, Robotic Arms & Hands Bedfordshire 06 th December 2012 Outline Bedfordshire 47 1 2 3 Considering design specifications 4 Bedfordshire 47 Robots are designed for specific purposes. For this reason
High Accuracy Articulated Robots with CNC Control Systems
 Copyright 2012 SAE International 2013-01-2292 High Accuracy Articulated Robots with CNC Control Systems Bradley Saund, Russell DeVlieg Electroimpact Inc. ABSTRACT A robotic arm manipulator is often an
Copyright 2012 SAE International 2013-01-2292 High Accuracy Articulated Robots with CNC Control Systems Bradley Saund, Russell DeVlieg Electroimpact Inc. ABSTRACT A robotic arm manipulator is often an
Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots
![Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots](/thumbs/27/11692183.jpg "Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots") Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Intelligent Flexible Automation
 Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
Robot components: Exteroceptive sensors
 Robotics 1 Robot components: Exteroceptive sensors Prof. Alessandro De Luca Robotics 1 1 ! force sensors Summary! strain gauges and joint torque sensor! 6D force/torque (F/T) sensor at robot wrist! RCC
Robotics 1 Robot components: Exteroceptive sensors Prof. Alessandro De Luca Robotics 1 1 ! force sensors Summary! strain gauges and joint torque sensor! 6D force/torque (F/T) sensor at robot wrist! RCC
Online Learning of Humanoid Robot Kinematics Under Switching Tools Contexts
 Online Learning of Humanoid Robot Kinematics Under Switching Tools Contexts Lorenzo Jamone 1, Bruno Damas 2,3, José Santos-Victor 2 and Atsuo Takanishi 1,4 Abstract In this paper a novel approach to kinematics
Online Learning of Humanoid Robot Kinematics Under Switching Tools Contexts Lorenzo Jamone 1, Bruno Damas 2,3, José Santos-Victor 2 and Atsuo Takanishi 1,4 Abstract In this paper a novel approach to kinematics
Active Vibration Isolation of an Unbalanced Machine Spindle
 UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
INSTRUCTOR WORKBOOK Quanser Robotics Package for Education for MATLAB /Simulink Users
 INSTRUCTOR WORKBOOK for MATLAB /Simulink Users Developed by: Amir Haddadi, Ph.D., Quanser Peter Martin, M.A.SC., Quanser Quanser educational solutions are powered by: CAPTIVATE. MOTIVATE. GRADUATE. PREFACE
INSTRUCTOR WORKBOOK for MATLAB /Simulink Users Developed by: Amir Haddadi, Ph.D., Quanser Peter Martin, M.A.SC., Quanser Quanser educational solutions are powered by: CAPTIVATE. MOTIVATE. GRADUATE. PREFACE
FIRST YEAR PROJECT SUMMARY
 FIRST YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Funding Scheme: 01 March 2008 Period covered: from 01 March 2008
FIRST YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Funding Scheme: 01 March 2008 Period covered: from 01 March 2008
THE CONTROL OF A ROBOT END-EFFECTOR USING PHOTOGRAMMETRY
 THE CONTROL OF A ROBOT END-EFFECTOR USING PHOTOGRAMMETRY Dr. T. Clarke & Dr. X. Wang Optical Metrology Centre, City University, Northampton Square, London, EC1V 0HB, UK t.a.clarke@city.ac.uk, x.wang@city.ac.uk
THE CONTROL OF A ROBOT END-EFFECTOR USING PHOTOGRAMMETRY Dr. T. Clarke & Dr. X. Wang Optical Metrology Centre, City University, Northampton Square, London, EC1V 0HB, UK t.a.clarke@city.ac.uk, x.wang@city.ac.uk
Designing Arms and Hands for the Humanoid Robot ROMAN
 Designing Arms and Hands for the Humanoid Robot ROMAN J. Hirth, K. Berns Robotics Research Lab, Dept. of Computer Sciences University of Kaiserslautern Kaiserslautern, Germany j_hirth, berns@informatik.uni-kl.de
Designing Arms and Hands for the Humanoid Robot ROMAN J. Hirth, K. Berns Robotics Research Lab, Dept. of Computer Sciences University of Kaiserslautern Kaiserslautern, Germany j_hirth, berns@informatik.uni-kl.de
Frequently Asked Questions
 Frequently Asked Questions Basic Facts What does the name ASIMO stand for? ASIMO stands for Advanced Step in Innovative Mobility. Who created ASIMO? ASIMO was developed by Honda Motor Co., Ltd., a world
Frequently Asked Questions Basic Facts What does the name ASIMO stand for? ASIMO stands for Advanced Step in Innovative Mobility. Who created ASIMO? ASIMO was developed by Honda Motor Co., Ltd., a world
Visual Servoing Methodology for Selective Tree Pruning by Human-Robot Collaborative System
 Ref: C0287 Visual Servoing Methodology for Selective Tree Pruning by Human-Robot Collaborative System Avital Bechar, Victor Bloch, Roee Finkelshtain, Sivan Levi, Aharon Hoffman, Haim Egozi and Ze ev Schmilovitch,
Ref: C0287 Visual Servoing Methodology for Selective Tree Pruning by Human-Robot Collaborative System Avital Bechar, Victor Bloch, Roee Finkelshtain, Sivan Levi, Aharon Hoffman, Haim Egozi and Ze ev Schmilovitch,
Torque and Rotation. Physics
 Torque and Rotation Physics Torque Force is the action that creates changes in linear motion. For rotational motion, the same force can cause very different results. A torque is an action that causes objects
Torque and Rotation Physics Torque Force is the action that creates changes in linear motion. For rotational motion, the same force can cause very different results. A torque is an action that causes objects
Full- day Workshop on Online and offline optimization for humanoid robots. at IEEE IROS 2013 in Tokyo
 Full- day Workshop on Online and offline optimization for humanoid robots at IEEE IROS 2013 in Tokyo Organizers: Eiichi Yoshida, Katja Mombaur, Tom Erez, Yuval Tassa Nov 7, 2013 TALK ABSTRACTS Tamim Asfour
Full- day Workshop on Online and offline optimization for humanoid robots at IEEE IROS 2013 in Tokyo Organizers: Eiichi Yoshida, Katja Mombaur, Tom Erez, Yuval Tassa Nov 7, 2013 TALK ABSTRACTS Tamim Asfour
Beamline Automation at the APS
 Beamline Automation at the APS John Maclean Group Leader, Beamline Controls and Data Acquisition, Advanced Photon Source Argonne National Laboratory A Laboratory Operated by The University of Chicago Introduction
Beamline Automation at the APS John Maclean Group Leader, Beamline Controls and Data Acquisition, Advanced Photon Source Argonne National Laboratory A Laboratory Operated by The University of Chicago Introduction
Artificial Intelligence
 Artificial Intelligence Robotics RWTH Aachen 1 Term and History Term comes from Karel Capek s play R.U.R. Rossum s universal robots Robots comes from the Czech word for corvee Manipulators first start
Artificial Intelligence Robotics RWTH Aachen 1 Term and History Term comes from Karel Capek s play R.U.R. Rossum s universal robots Robots comes from the Czech word for corvee Manipulators first start
T-REDSPEED White paper
 T-REDSPEED White paper Index Index...2 Introduction...3 Specifications...4 Innovation...6 Technology added values...7 Introduction T-REDSPEED is an international patent pending technology for traffic violation
T-REDSPEED White paper Index Index...2 Introduction...3 Specifications...4 Innovation...6 Technology added values...7 Introduction T-REDSPEED is an international patent pending technology for traffic violation
UNIT 1 INTRODUCTION TO NC MACHINE TOOLS
 UNIT 1 INTRODUCTION TO NC MACHINE TOOLS Structure 1.1 Introduction Objectives 1.2 NC Machines 1.2.1 Types of NC Machine 1.2.2 Controlled Axes 1.2.3 Basic Components of NC Machines 1.2.4 Problems with Conventional
UNIT 1 INTRODUCTION TO NC MACHINE TOOLS Structure 1.1 Introduction Objectives 1.2 NC Machines 1.2.1 Types of NC Machine 1.2.2 Controlled Axes 1.2.3 Basic Components of NC Machines 1.2.4 Problems with Conventional
Concept and Design of the Modular Actuator System for the Humanoid Robot MYON
 Concept and Design of the Modular Actuator System for the Humanoid Robot MYON Torsten Siedel, Manfred Hild and Mario Weidner Neurorobotics Research Laboratory Humboldt-Universität zu Berlin Unter den Linden
Concept and Design of the Modular Actuator System for the Humanoid Robot MYON Torsten Siedel, Manfred Hild and Mario Weidner Neurorobotics Research Laboratory Humboldt-Universität zu Berlin Unter den Linden
Frequently Asked Questions
 Frequently Asked Questions Basic Facts What does the name ASIMO stand for? ASIMO stands for Advanced Step in Innovative Mobility. Who created ASIMO? ASIMO was developed by Honda Motor Co., Ltd., a world
Frequently Asked Questions Basic Facts What does the name ASIMO stand for? ASIMO stands for Advanced Step in Innovative Mobility. Who created ASIMO? ASIMO was developed by Honda Motor Co., Ltd., a world
Robotic motion planning for 8- DOF motion stage
 Robotic motion planning for 8- DOF motion stage 12 November Mark Geelen Simon Jansen Alten Mechatronics www.alten.nl rosindustrial@alten.nl Introduction Introduction Alten FEI Motion planning MoveIt! Proof
Robotic motion planning for 8- DOF motion stage 12 November Mark Geelen Simon Jansen Alten Mechatronics www.alten.nl rosindustrial@alten.nl Introduction Introduction Alten FEI Motion planning MoveIt! Proof
Design of a Flexible User Interface Demonstrator, Control Software and Sensors
 Design of a Flexible User Interface Demonstrator, Control Software and Sensors Editors: Paul Panek 1) & Håkan Neveryd 2) Contributors: Georg Edelmayer 1), Håkan Eftring 2), Gunilla Knall 2), Charlotte
Design of a Flexible User Interface Demonstrator, Control Software and Sensors Editors: Paul Panek 1) & Håkan Neveryd 2) Contributors: Georg Edelmayer 1), Håkan Eftring 2), Gunilla Knall 2), Charlotte
Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com g.teti@robotechsrl.
 2008/2009 A.A. Corso di Percezione Robotica Modulo D: Applicazioni ed Esercitazioni Lezione D.I Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com
2008/2009 A.A. Corso di Percezione Robotica Modulo D: Applicazioni ed Esercitazioni Lezione D.I Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com
APPLICATION OF AN INDUSTRIAL ROBOT IN MASTER- SLAVE TELEOPERATION WITH HAPTIC INTERFACE
 TAMPERE UNIVERSITY OF TECHNOLOGY RIGOBERTO CABRERA APPLICATION OF AN INDUSTRIAL ROBOT IN MASTER- SLAVE TELEOPERATION WITH HAPTIC INTERFACE Master of Science Thesis Examiners: Professor Matti Vilenius and
TAMPERE UNIVERSITY OF TECHNOLOGY RIGOBERTO CABRERA APPLICATION OF AN INDUSTRIAL ROBOT IN MASTER- SLAVE TELEOPERATION WITH HAPTIC INTERFACE Master of Science Thesis Examiners: Professor Matti Vilenius and
PhD Program in Bioengineering and Robotics
 PhD Program in Bioengineering and Robotics Curriculum Advanced and Humanoid Robotics Research themes 1. EVENT-DRIVEN VISION SENSORS FOR HUMANOID ROBOTS... 3 2. BUILDING THE NEUROMORPHIC ICUB... 4 3. EVENT-DRIVEN
PhD Program in Bioengineering and Robotics Curriculum Advanced and Humanoid Robotics Research themes 1. EVENT-DRIVEN VISION SENSORS FOR HUMANOID ROBOTS... 3 2. BUILDING THE NEUROMORPHIC ICUB... 4 3. EVENT-DRIVEN
Hollow Cylinder Apparatus (GDS SS-HCA)
") HCA:1 Options available for SS-HCA Axial Load/Torque 1kN/1Nm 1kN/2Nm 12kN/2Nm 15kN/4Nm Dynamic upgrade frequencies Hollow Cylinder Apparatus (GDS SS-HCA).5Hz 2Hz 1Hz 5Hz Sample Height/Outer Ø/Inner Ø 2/1/6mm
HCA:1 Options available for SS-HCA Axial Load/Torque 1kN/1Nm 1kN/2Nm 12kN/2Nm 15kN/4Nm Dynamic upgrade frequencies Hollow Cylinder Apparatus (GDS SS-HCA).5Hz 2Hz 1Hz 5Hz Sample Height/Outer Ø/Inner Ø 2/1/6mm
TRACTION-DRIVE SEVEN DEGREES-OF-FREEDOM TELEROBOT ARM: A CONCEPT FOR MANIPULATION IN SPACE a. D. P. Kuban D. M. Williams
 TRACTION-DRIVE SEVEN DEGREES-OF-FREEDOM TELEROBOT ARM: A CONCEPT FOR MANIPULATION IN SPACE a CONF-8704161 1 DE87 010895 D. P. Kuban D. M. Williams Oak Ridge National Laboratory^ Oak Ridge, Tennessee 37831
TRACTION-DRIVE SEVEN DEGREES-OF-FREEDOM TELEROBOT ARM: A CONCEPT FOR MANIPULATION IN SPACE a CONF-8704161 1 DE87 010895 D. P. Kuban D. M. Williams Oak Ridge National Laboratory^ Oak Ridge, Tennessee 37831
E X P E R I M E N T 8
 E X P E R I M E N T 8 Torque, Equilibrium & Center of Gravity Produced by the Physics Staff at Collin College Copyright Collin College Physics Department. All Rights Reserved. University Physics, Exp 8:
E X P E R I M E N T 8 Torque, Equilibrium & Center of Gravity Produced by the Physics Staff at Collin College Copyright Collin College Physics Department. All Rights Reserved. University Physics, Exp 8:
Tutorial 1. Introduction to robot
 Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
Adaptive Tool-Use Strategies for Anthropomorphic Service Robots
 Adaptive Tool-Use Strategies for Anthropomorphic Service Robots Jörg Stückler and Sven Behnke Abstract Tool-use is one of the most complex object manipulation abilities of humans and robots. In this paper,
Adaptive Tool-Use Strategies for Anthropomorphic Service Robots Jörg Stückler and Sven Behnke Abstract Tool-use is one of the most complex object manipulation abilities of humans and robots. In this paper,
Artificial Intelligence and Robotics @ Politecnico di Milano. Presented by Matteo Matteucci
 1 Artificial Intelligence and Robotics @ Politecnico di Milano Presented by Matteo Matteucci What is Artificial Intelligence «The field of theory & development of computer systems able to perform tasks
1 Artificial Intelligence and Robotics @ Politecnico di Milano Presented by Matteo Matteucci What is Artificial Intelligence «The field of theory & development of computer systems able to perform tasks
This week. CENG 732 Computer Animation. Challenges in Human Modeling. Basic Arm Model
 CENG 732 Computer Animation Spring 2006-2007 Week 8 Modeling and Animating Articulated Figures: Modeling the Arm, Walking, Facial Animation This week Modeling the arm Different joint structures Walking
CENG 732 Computer Animation Spring 2006-2007 Week 8 Modeling and Animating Articulated Figures: Modeling the Arm, Walking, Facial Animation This week Modeling the arm Different joint structures Walking
How To Choose The Right End Effector. For Your Application
 How To Choose The Right End Effector For Your Application TABLE OF CONTENTS INTRODUCTION... 3 DIFFERENT END EFFECTORS ON THE MARKET... 3 ROBOT GRIPPERS... 3 ROBOTIC TOOLS... 7 HOW TO CHOOSE?... 8 HOW MUCH
How To Choose The Right End Effector For Your Application TABLE OF CONTENTS INTRODUCTION... 3 DIFFERENT END EFFECTORS ON THE MARKET... 3 ROBOT GRIPPERS... 3 ROBOTIC TOOLS... 7 HOW TO CHOOSE?... 8 HOW MUCH
Obrero: A platform for sensitive manipulation
 Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots Obrero: A platform for sensitive manipulation Eduardo Torres-Jara Computer Science and Artificial Intelligence Laboratory Massachusetts
Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots Obrero: A platform for sensitive manipulation Eduardo Torres-Jara Computer Science and Artificial Intelligence Laboratory Massachusetts
MOTION CONTROL. Special issue on. A helping hand from robotics, page 56 PIEZO-DRIVEN STAGE MAKES MOVES IN MICROMETERS, PAGE 18
 PIEZO-DRIVEN STAGE MAKES MOVES IN MICROMETERS, PAGE 18 Special issue on MOTION CONTROL A helping hand from robotics, page 56 Thwarting the time bandits: How to overcome actuator delays, page 64 THE BASICS
PIEZO-DRIVEN STAGE MAKES MOVES IN MICROMETERS, PAGE 18 Special issue on MOTION CONTROL A helping hand from robotics, page 56 Thwarting the time bandits: How to overcome actuator delays, page 64 THE BASICS
INTRODUCTION. Robotics is a relatively young field of modern technology that crosses traditional
 1 INTRODUCTION Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires knowledge
1 INTRODUCTION Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires knowledge
Industrial Robot Technology
 Unit 132: Industrial Robot Technology Unit code: Y/602/5130 QCF Level 3: BTEC Nationals Credit value: 10 Guided learning hours: 60 Aim and purpose This unit will develop learners understanding of the operation
Unit 132: Industrial Robot Technology Unit code: Y/602/5130 QCF Level 3: BTEC Nationals Credit value: 10 Guided learning hours: 60 Aim and purpose This unit will develop learners understanding of the operation
How Far Is the Human Hand? A Review on Anthropomorphic Robotic End-effectors
 How Far Is the Human Hand? A Review on Anthropomorphic Robotic End-effectors L. Biagiotti 1, F. Lotti 2, C. Melchiorri 1, and G. Vassura 2 1 DEIS, University of Bologna Via Risorgimento 2, 40136 Bologna,
How Far Is the Human Hand? A Review on Anthropomorphic Robotic End-effectors L. Biagiotti 1, F. Lotti 2, C. Melchiorri 1, and G. Vassura 2 1 DEIS, University of Bologna Via Risorgimento 2, 40136 Bologna,
Annex 1 - Description of Work
 SIXTH FRAMEWORK PROGRAMME PRIORITY 2 Information Society Technologies Cognitive Systems Contract for: INTEGRATED PROJECT Annex 1 - Description of Work Year 3 Revision of Section 8 - Detailed Implementation
SIXTH FRAMEWORK PROGRAMME PRIORITY 2 Information Society Technologies Cognitive Systems Contract for: INTEGRATED PROJECT Annex 1 - Description of Work Year 3 Revision of Section 8 - Detailed Implementation
Visual Servoing for the REEM Humanoid Robot s Upper Body
 Visual Servoing for the REEM Humanoid Robot s Upper Body Don Joven Agravante, Jordi Pagès and François Chaumette Abstract In this paper, a framework for visual servo control of a humanoid robot s upper
Visual Servoing for the REEM Humanoid Robot s Upper Body Don Joven Agravante, Jordi Pagès and François Chaumette Abstract In this paper, a framework for visual servo control of a humanoid robot s upper
Precision Miniature Load Cell. Models 8431, 8432 with Overload Protection
 w Technical Product Information Precision Miniature Load Cell with Overload Protection 1. Introduction The load cells in the model 8431 and 8432 series are primarily designed for the measurement of force
w Technical Product Information Precision Miniature Load Cell with Overload Protection 1. Introduction The load cells in the model 8431 and 8432 series are primarily designed for the measurement of force
Robots are ready for medical manufacturing
 Robotics Industry focus Robots are ready for medical manufacturing Robots provide new twists, bends, and rolls for automated medical manufacturing. Leslie Gordon Senior Editor R Robotic automation has
Robotics Industry focus Robots are ready for medical manufacturing Robots provide new twists, bends, and rolls for automated medical manufacturing. Leslie Gordon Senior Editor R Robotic automation has
Computer Animation. Lecture 2. Basics of Character Animation
 Computer Animation Lecture 2. Basics of Character Animation Taku Komura Overview Character Animation Posture representation Hierarchical structure of the body Joint types Translational, hinge, universal,
Computer Animation Lecture 2. Basics of Character Animation Taku Komura Overview Character Animation Posture representation Hierarchical structure of the body Joint types Translational, hinge, universal,
FTDI VCP DRIVER (free) (WIN/MAC/LINUX) http://www.ftdichip.com/drivers/vcp.htm
 (WIN/MAC/LINUX) http://www.ftdichip.com/drivers/vcp.htm") 002 - CONNECTING THE PRINTER Now that you have an idea what 3D printing entails, we can continue and connect the printer to your computer. First make sure you have a computer with a decent amount of RAM
002 - CONNECTING THE PRINTER Now that you have an idea what 3D printing entails, we can continue and connect the printer to your computer. First make sure you have a computer with a decent amount of RAM
MEMS mirror for low cost laser scanners. Ulrich Hofmann
 MEMS mirror for low cost laser scanners Ulrich Hofmann Outline Introduction Optical concept of the LIDAR laser scanner MEMS mirror requirements MEMS mirror concept, simulation and design fabrication process
MEMS mirror for low cost laser scanners Ulrich Hofmann Outline Introduction Optical concept of the LIDAR laser scanner MEMS mirror requirements MEMS mirror concept, simulation and design fabrication process
Chapter 2 Fundamentals of Robotics
 This sample chapter is for review purposes only. Copyright The Goodheart-Willcox Co., Inc. All rights reserved. Chapter 2 Fundamentals of Robotics Chapter Topics 2.1 Parts of a Robot 2.2 Degrees of Freedom
This sample chapter is for review purposes only. Copyright The Goodheart-Willcox Co., Inc. All rights reserved. Chapter 2 Fundamentals of Robotics Chapter Topics 2.1 Parts of a Robot 2.2 Degrees of Freedom
Robotics and Automation Blueprint
 Robotics and Automation Blueprint This Blueprint contains the subject matter content of this Skill Connect Assessment. This Blueprint does NOT contain the information one would need to fully prepare for
Robotics and Automation Blueprint This Blueprint contains the subject matter content of this Skill Connect Assessment. This Blueprint does NOT contain the information one would need to fully prepare for
PSA-G Precision Gearheads
 Zero Backlash High Torque PSA-G Precision Gearheads High Precision When your applications require accurate positioning and precise motion control, Harmonic Drive Technologies offers the perfect solution.
Zero Backlash High Torque PSA-G Precision Gearheads High Precision When your applications require accurate positioning and precise motion control, Harmonic Drive Technologies offers the perfect solution.
CALIBRATION OF A ROBUST 2 DOF PATH MONITORING TOOL FOR INDUSTRIAL ROBOTS AND MACHINE TOOLS BASED ON PARALLEL KINEMATICS
 CALIBRATION OF A ROBUST 2 DOF PATH MONITORING TOOL FOR INDUSTRIAL ROBOTS AND MACHINE TOOLS BASED ON PARALLEL KINEMATICS E. Batzies 1, M. Kreutzer 1, D. Leucht 2, V. Welker 2, O. Zirn 1 1 Mechatronics Research
CALIBRATION OF A ROBUST 2 DOF PATH MONITORING TOOL FOR INDUSTRIAL ROBOTS AND MACHINE TOOLS BASED ON PARALLEL KINEMATICS E. Batzies 1, M. Kreutzer 1, D. Leucht 2, V. Welker 2, O. Zirn 1 1 Mechatronics Research
Interactive Motion Simulators
 motionsimulator motionsimulator About the Company Since its founding in 2003, the company Buck Engineering & Consulting GmbH (BEC), with registered offices in Reutlingen (Germany) has undergone a continuous
motionsimulator motionsimulator About the Company Since its founding in 2003, the company Buck Engineering & Consulting GmbH (BEC), with registered offices in Reutlingen (Germany) has undergone a continuous
Operational Space Control for A Scara Robot
 Operational Space Control for A Scara Robot Francisco Franco Obando D., Pablo Eduardo Caicedo R., Oscar Andrés Vivas A. Universidad del Cauca, {fobando, pacaicedo, avivas }@unicauca.edu.co Abstract This
Operational Space Control for A Scara Robot Francisco Franco Obando D., Pablo Eduardo Caicedo R., Oscar Andrés Vivas A. Universidad del Cauca, {fobando, pacaicedo, avivas }@unicauca.edu.co Abstract This
Development of Docking System for Mobile Robots Using Cheap Infrared Sensors
 Development of Docking System for Mobile Robots Using Cheap Infrared Sensors K. H. Kim a, H. D. Choi a, S. Yoon a, K. W. Lee a, H. S. Ryu b, C. K. Woo b, and Y. K. Kwak a, * a Department of Mechanical
Development of Docking System for Mobile Robots Using Cheap Infrared Sensors K. H. Kim a, H. D. Choi a, S. Yoon a, K. W. Lee a, H. S. Ryu b, C. K. Woo b, and Y. K. Kwak a, * a Department of Mechanical
Industrial Walking Systems - A Review
 Subjects for period of study at LARM in Cassino For stages and thesis developments CONTACT: prof Marco Ceccarelli at Ceccarelli@unicas.it LARM webpage: http://webuser.unicas.it/weblarm/larmindex.htm SUBJECT:
Subjects for period of study at LARM in Cassino For stages and thesis developments CONTACT: prof Marco Ceccarelli at Ceccarelli@unicas.it LARM webpage: http://webuser.unicas.it/weblarm/larmindex.htm SUBJECT:
A 5 Degree Feedback Control Robotic Arm (Haptic Arm)
") A 5 Degree Feedback Control Robotic Arm (Haptic Arm) 1 Prof. Sheetal Nirve, 2 Mr.Abhilash Patil, 3 Mr.Shailesh Patil, 4 Mr.Vishal Raut Abstract: Haptics is the science of applying touch sensation and control
A 5 Degree Feedback Control Robotic Arm (Haptic Arm) 1 Prof. Sheetal Nirve, 2 Mr.Abhilash Patil, 3 Mr.Shailesh Patil, 4 Mr.Vishal Raut Abstract: Haptics is the science of applying touch sensation and control
Description. Dimensions. Features. www.pwb-encoders.com. precision works better
 Description The MEC22 is a high resolution optical hollow shaft encoder that can be fixed quickly and easily on different sizes of motor shafts. The encoder provides two square wave outputs in quadrature
Description The MEC22 is a high resolution optical hollow shaft encoder that can be fixed quickly and easily on different sizes of motor shafts. The encoder provides two square wave outputs in quadrature
Evaluation of Sensors as Input Devices for Computer Music Interfaces
 Evaluation of Sensors as Input Devices for Computer Music Interfaces Mark T. Marshall 1 and Marcelo M. Wanderley 1 Input Devices and Musical Interaction Laboratory, McGill University - Music Technology,
Evaluation of Sensors as Input Devices for Computer Music Interfaces Mark T. Marshall 1 and Marcelo M. Wanderley 1 Input Devices and Musical Interaction Laboratory, McGill University - Music Technology,
Design of an Insulin Pump. Purpose of an Insulin Pump:
 Design of an Insulin Pump Purpose of an Insulin Pump: Insulin is a hormone central to regulating carbohydrate and fat metabolism in the body. It is secreted regularly within the body and aids in converting
Design of an Insulin Pump Purpose of an Insulin Pump: Insulin is a hormone central to regulating carbohydrate and fat metabolism in the body. It is secreted regularly within the body and aids in converting
MoveInspect HF HR. 3D measurement of dynamic processes MEASURE THE ADVANTAGE. MoveInspect TECHNOLOGY
 MoveInspect HF HR 3D measurement of dynamic processes MEASURE THE ADVANTAGE MoveInspect TECHNOLOGY MoveInspect HF HR 3D measurement of dynamic processes Areas of application In order to sustain its own
MoveInspect HF HR 3D measurement of dynamic processes MEASURE THE ADVANTAGE MoveInspect TECHNOLOGY MoveInspect HF HR 3D measurement of dynamic processes Areas of application In order to sustain its own
Introduction to Robotics Analysis, Systems, Applications
 Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
LEGO NXT-based Robotic Arm
 Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University barna.resko@arek.uni-obuda.hu, hamoriakos@gmail.com, polish1987@gmail.com
Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University barna.resko@arek.uni-obuda.hu, hamoriakos@gmail.com, polish1987@gmail.com
What is a Biomedical Engineer?
 A What is a Biomedical Engineer? Draw and label a picture of a biomedical engineer at work. Explain your drawing of a biomedical engineer: A-6 Student Post Assessment Lessons 1 and 2 What is a Biomedical
A What is a Biomedical Engineer? Draw and label a picture of a biomedical engineer at work. Explain your drawing of a biomedical engineer: A-6 Student Post Assessment Lessons 1 and 2 What is a Biomedical
Human vs. Robotic Tactile Sensing: Detecting Lumps in Soft Tissue
 Human vs. Robotic Tactile Sensing: Detecting Lumps in Soft Tissue James C. Gwilliam1,2, Zachary Pezzementi 1, Erica Jantho 1, Allison M. Okamura 1, and Steven Hsiao 2 1 Laboratory for Computational Sensing
Human vs. Robotic Tactile Sensing: Detecting Lumps in Soft Tissue James C. Gwilliam1,2, Zachary Pezzementi 1, Erica Jantho 1, Allison M. Okamura 1, and Steven Hsiao 2 1 Laboratory for Computational Sensing
2/26/2008. Sensors For Robotics. What is sensing? Why do robots need sensors? What is the angle of my arm? internal information
 Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Environmental Monitoring with Sensors: Hands-on Exercise
 Environmental Monitoring with Sensors: Hands-on Exercise Now that you ve seen a few types of sensors, along with some circuits that can be developed to condition their responses, let s spend a bit of time
Environmental Monitoring with Sensors: Hands-on Exercise Now that you ve seen a few types of sensors, along with some circuits that can be developed to condition their responses, let s spend a bit of time
CROPS: Intelligent sensing and manipulation for sustainable production and harvesting of high valued crops, clever robots for crops.
 CROPS GA 246252 www.crops-robots.eu CROPS: Intelligent sensing and manipulation for sustainable production and harvesting of high valued crops, clever robots for crops. The main objective of CROPS is to
CROPS GA 246252 www.crops-robots.eu CROPS: Intelligent sensing and manipulation for sustainable production and harvesting of high valued crops, clever robots for crops. The main objective of CROPS is to
Robot Sensors. Outline. The Robot Structure. Robots and Sensors. Henrik I Christensen
 Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 hic@cc.gatech.edu Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 hic@cc.gatech.edu Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Sensors and Cellphones
 Sensors and Cellphones What is a sensor? A converter that measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument What are some sensors we use every
Sensors and Cellphones What is a sensor? A converter that measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument What are some sensors we use every