Artificial Intelligence
|
|
|
- Juniper Cobb
- 7 years ago
- Views:
Transcription
1 Artificial Intelligence Robotics RWTH Aachen 1

2 Term and History Term comes from Karel Capek s play R.U.R. Rossum s universal robots Robots comes from the Czech word for corvee Manipulators first start in development of robots, they were machines that humans controlled remotely Numeric control first used in 1952 at MIT, allows very precise movement in relation to a given coordinate system These techniques lead to first programmable manipulator which was installed in 1961 Mobile robots invented for automated transportation and driver-less cars Mostly used for Get and Bring services First humanoid robot in 1975 (Japan) RWTH Aachen 2

3 Definition: What is a Robot? Robots are physical agents They manipulate the physical world Equipped with sensors to perceive environment Effectors to assert physical forces on environment Three main categories Manipulators Mobile robots Humanoid robots RWTH Aachen 3

4 Topics Robot Hardware Localization Path Planning and Moving Reality RWTH Aachen 4

5 Robot Hardware Sensors Used to perceive the robot s environment Two types of sensors Passive sensors: Camera,... Active sensors: Sonar, Radar, Laser scanners,... Three classes of sensors: Range finders Used to detect distance to nearby objects. Imaging sensors These are cameras that provide images of the environment. Image sensors are becoming more and more common. Used for localization and object tracking. Proprioceptive sensors These sensors tell the robot about its own state (Example: shaft decoder in revolute joints). RWTH Aachen 5

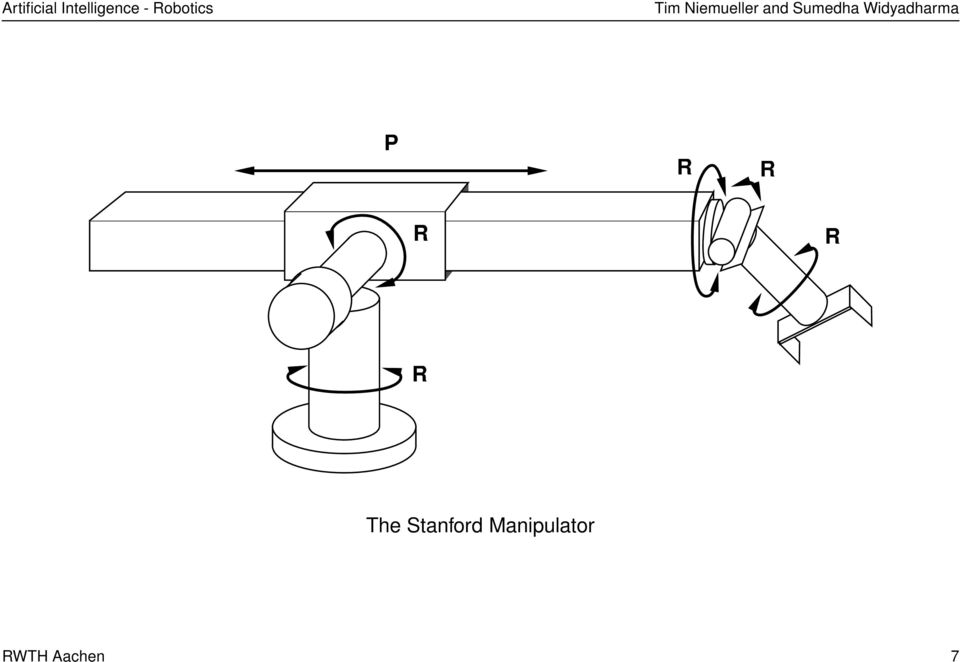
6 Artificial Intelligence - Robotics Robotic Hardware Effectors Effectors are the means by which robots manipulate their environment, move and change the shape of their body Abstract concept of degrees of freedom (DOF) to understand effectors We count one degree of freedom for each independent direction in which a robot or one of its effectors can move Example Autonomous Underwater Vehicle (AUV) : It has six degrees of freedom: Three for its x y z location in space and three for its orientation (also known as yaw, roll and pitch) Six DOFs are needed to place an object at a particular point in a particular orientation Manipulator has exactly six DOFs: Five revolute joints (R) and one prismatic joint (P). In general robots with more DOF than needed are easier to control and program RWTH Aachen 6
 and one prismatic joint (P).")
7 The Stanford Manipulator RWTH Aachen 7
8 Artificial Intelligence - Robotics Robotic Hardware Effectors Mobile robots are special Number of DOF do not need to have corresponding actuated elements Example car in a plane : You can move the car forward and backward and turn, giving it two DOFs. But the car s kinematic configuration is three-dimensional: you can maneuver to any any orientation. So it has three effective DOFs but only two controllable DOFs x y point, in We say a robot is nonholonomic if it has more effective DOFs than controllable DOFs and holonomic otherwise Holonomic robots are easier to control (think of parking the car: it would be much easier to move the car sideways) RWTH Aachen 8

9 Robotic Hardware Movement Mobile robots have special effectors for locomotion Common types are wheels, tracks and legs Differential drive: Two independently actuated wheels one on each side of the robot When moving at the same speed the robot moves straight When moving in opposite directions the robot turns on the spot Synchro drive: Each wheel can move and turn around its own axis This can lead to chaos Programmer (or engineer) needs to assure the constraint that all wheels always point in the same direction and move at the same speed RWTH Aachen 9
 needs to assure the constraint that all wheels always point in the same direction and move at the same speed RWTH")
10 Robotic Perception Perception is the process of mapping raw sensor data into an internal representation A good representation should meet three criteria: It should contain enough information for the robot to make a right decision be structured in a way that it can be updated efficiently be natural, meaning that internal variables correspond to natural state variables in the physical world RWTH Aachen 10

11 Localization Basics Very generic perception task and one of the most pervasive ones Problem of determining where things are Knowing where things are is a requirement for the robot for any successful interaction with the physical world Manipulators need to know where the objects are that they have to deal with Mobile robots must know where they are to find their way to the target location There are three increasingly difficult flavors of localization problems: Tracking Initial state of the object to be localized is known Global localization Initial location of the object is unknown When found this becomes a tracking problem. Kidnapping Take the object and place it somewhere else knowing anything track this object. robot has to find the object. Robot has to localize it without RWTH Aachen 11

12 yt yt θ t Artificial Intelligence - Robotics Pose Description and simple Geometry To keep things simple we assume: Robot moves slowly in a plane Robot has an exact map of the environment. No Gaussian noise (of course this is not true in a real environment) Describe pose of robot by its cartesian coordinates x y and its head θ. Formalize as vector X t x t Define transition with t intervals t. t 1 with angular velocity ωt and translational velocity vt for small time Robots pose is X t x t θ t. Landmark at location x i yi. RWTH Aachen 12

13 Artificial Intelligence - Robotics Transition and Sensor Model: Deterministic transition model: v t t cosθ t ˆX t 1 f Xt vt ω t Xt v t t sinθ t a t ω t t Sensor model: Sensors detect stable and recognizable features called landmarks. Range and bearing can be calculated by ẑ t h x t x t x i 2 arctan y ï x ï yt y t x t θt y i 2 Alternative: range scan model. Sensors produce a vector of range values z t z 1 zm. Range scan model more indenpendent landmark model can provide immediate localization RWTH Aachen 13

14 x x i, y i h(x t ) ω t t v t t θ t+1 θ t x t+1 x t y RWTH Aachen 14

15 Artificial Intelligence - Robotics Monte Carlo Localization (MCL) MCL is a particle filtering algorithm. Requirements: Map of the environment (a priori known or learned) Appropriate sensor model and motion model Create population of N samples by a given probabilistic distribution. Samples shown as particles in the figure. Then a continuous update cycle is started with the following steps: Each sample is propagated forward by sampling the next state value X t value X t for the sample, and using the transition model given: P Xt Each sample is weighted by the likelihood it assigns to the new evidence: P 1 x t 1 given the current. e t 1 x t Resample a new population of N samples. New samples are selected from current population; probability that a particular sample is selected is proportional to its weight. New samples are unweighted. As the robot gathers more knowledge the particles concentrate at one or more points. At some point in time all points are in one cluster point. That is the location of the robot in the field. RWTH Aachen 15 1

16 RWTH Aachen Robot position Robot position Robot position Artificial Intelligence - Robotics 16

17 Artificial Intelligence - Robotics Extended Kalman Filter (EKF) Efficient computational (recursive) solution to the least-squares method It is very powerful in many aspects: it supports estimations of past, present and future (with the latter one being the important thing for robotics) Continuous update cycle with alternating prediction and correction phases The robots state X t is calculated by its posterior probability with P Xt z 1:t a1:ẗ 1 by a Gaussian Problem: Gaussian only closed under linear modules. nonlinear models must be linearized Robotic motion and sensor models are This is done by a local approximation of a nonlinear function by a linear function. When using (first degree) Taylor expansion for approximation this is called Extended Kalman Filter This is used to get an estimated location based on previous estimate and current sensor data (shown as ellipse in figure on next page). When spotting a landmark the uncertainty can be reduced while moving without such causes growing uncertainty RWTH Aachen 17

18 Robot Landmark Time Update ("Predict") Measurement Update ("Correct") RWTH Aachen 18
 RWTH")
19 Planning to move There are different kinds of movement problems: The point-to-point motion problem The main issue is to determine the right motions of a robots effectors to reach a certain target location. Point-to-point motion problems are the easier ones to solve. The compliant motion problem Compliant motion describes a robots motion when in contact with an obstacle. These problems have more constraints and are therefore more difficult to solve. RWTH Aachen 19

20 Workspace and Configuration Space Workspace model Robot and environment share the same coordinate system The state of the robot is represented by the carthesian coordinates of all its parts. Linkage constraints render path finding extremely difficult Configuration space model Workspace coordinates need to be transformed The state of the robot is represented by the configuration of its joints Constraints are easier to deal with in configuration space RWTH Aachen 20

21 RWTH Aachen 21 Configuration Space Configuration 3 Configuration 1 Configuration 2 (a) The workspace Configuration 1 Configuration 2 Configuration 3 phi1 phi2 (b) The configuration space Artificial Intelligence - Robotics
22 RWTH Aachen 22 A Way through free Space Cell decomposition method Configuration 3 Configuration 1 Configuration 2 (c) The workspace Configuration 1 Configuration 2 Configuration 3 phi1 phi2 (d) Decomposed Artificial Intelligence - Robotics
23 Cell decomposition The free space is decomposed into (not necessarily square) cells Within the cell path finding is easy, which reduces path finding to a discrete graph search. The cell decomposition method has the advantage of easy implementation, but suffers some deficiencies. Polluted cells require extra attention One solution would be to further subdivide these cells. This again leads to fast increase in complexity. Another could be to allow free shapes for cells. Scales poorly with the dimension of the configuration space Resulting paths can have arbitrary sharp curves which can be impossible to perform in reality. Paths can come arbitrarily close to an obstacle. RWTH Aachen 23
24 Potential Fields Potential fields are a way to solve several of the problems that the cell decomposition has. A potential field is a function over the configuration space. Its value grows with the proximity to an obstacle RWTH Aachen 24
25 Skeletonization Methods The idea of skeletonization lies in reducing the complexity of free space to a one-dimensional representation. Voronoi diagrams In this case the skeleton is a voronoi diagram of the free space. RWTH Aachen 25
26 Path planning with a Voronoi Diagram A robot would use the following procedure to reach a point in configuration space: Change its configuration to a point on the skeleton Due to the nature of the skeleton this is always possible with a straight line through free space. Follow the skeleton to the point closest to the destination Take another straight line until the destination configuration is reached This method again reduces the path planning problem to a discrete graph seach along the voronoi diagram. The found paths are in general not the shortest, but they have the advantage to maximise clearance. RWTH Aachen 26
27 Disadvantages of Voronoi Diagrams There are several drawbacks when utilizing this method for path planning: This method is difficult to apply to higher dimensional configuration spaces If the free space is wide open it tends to induce large detours As obstacles can take strange shapes in configuration space voronoi diagrams can be quite hard to compute. To avoid large detours one simply needs more routes. Probabilistic roadmaps introduce a completely different approach to path planning Pick a random configuration If it is in occupied space discard it Repeat until N valid configurations have been found Connect any two points which have an easy connection (e.g. a straight line) add the start and end point to the resulting graph RWTH Aachen 27
28 More on Probabilistic Roadmaps Probabilistic roadmaps are theoretically incomplete. Possible improvements: To introduce more points To concentrate points in areas that are likely to contain a path To take geometric properties of the configuration space into account With these improvements, the method normally scales better to high-dimensional configuration spaces than most other path planning techniques. RWTH Aachen 28
29 Artificial Intelligence - Robotics Moving a robot Forces are exerted on effectors to move them Robots can only follow arbitratry paths at arbitrary slow speeds Dynamic state models Dynamic state models would generate better motion plans They are unusable for anything other than trivial robots Controllers Proportional integrative derivative controllers (PID controller) a t K P y t x t KI y t x t dt K D y t t x t RWTH Aachen 29
30 Potential Field Control and Reactive Control Potential field control Target configuration is an universal attractor Obstacles emit a repellent force The robot simply follows the resulting gradients No motion planning required Reactive control In cases where accurate models are not available Based on rulesets Reacts on immediate environment feedback No preplanning needed RWTH Aachen 30
31 RWTH Aachen 31 Reality Today robots are employed in many areas: Industry/Agriculture Melon harvesters Ore transporters Sewer mappers Paint strippers Transport Container transporters that load/unload cargo ships Medication and food transport systems in hospitals Autonomous helicopters to reach remote areas Hazardous environment They help clear nuclear waste (e.g. in Chernobyl) They searched the remains of the WTC for survivors They help destroy ammunition all over the world Artificial Intelligence - Robotics
32 A real-life Example: The AllemaniAC Robocup Team Sensors Laser Range Scanner 30 cm above the floor to detect obstacles (not the ball) Camera which can be panned horizontally and vertically Shaft decoders in drives WLAN Camera Laser Range Scanner Effectors 2 Motors with 2.5 kw each giving a speed of 12 km/h Shoot Effector Shoot effector electro-magnetic spools Two Pentium III (933 MHz) CPUs One for image recognition other for higher level tasks Differential Drive Uses a form of Monte Carlo Localization Base station besides the field as communication point RWTH Aachen 32
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Artificial Intelligence An Introduction to Robotics
 Artificial Intelligence An Introduction to Robotics Tim Niemueller and Sumedha Widyadharma July 8, 2003 Abstract This document gives a short introduction to the basics of robotics in the context of artificial
Artificial Intelligence An Introduction to Robotics Tim Niemueller and Sumedha Widyadharma July 8, 2003 Abstract This document gives a short introduction to the basics of robotics in the context of artificial
CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation. Prof. Dr. Hani Hagras
 1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots
![Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots](/thumbs/27/11692183.jpg "Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots") Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
Robot Navigation. Johannes Maurer, Institute for Software Technology TEDUSAR Summerschool 2014. u www.tugraz.at
 1 Robot Navigation u www.tugraz.at 2 Motivation challenges physical laws e.g. inertia, acceleration uncertainty e.g. maps, observations geometric constraints e.g. shape of a robot dynamic environment e.g.
1 Robot Navigation u www.tugraz.at 2 Motivation challenges physical laws e.g. inertia, acceleration uncertainty e.g. maps, observations geometric constraints e.g. shape of a robot dynamic environment e.g.
Industrial Robotics. Training Objective
 Training Objective After watching the program and reviewing this printed material, the viewer will learn the basics of industrial robot technology and how robots are used in a variety of manufacturing
Training Objective After watching the program and reviewing this printed material, the viewer will learn the basics of industrial robot technology and how robots are used in a variety of manufacturing
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motivation Recall: Discrete filter Discretize
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motivation Recall: Discrete filter Discretize
Mobile Robot FastSLAM with Xbox Kinect
 Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
Robot coined by Karel Capek in a 1921 science-fiction Czech play
 Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Path Tracking for a Miniature Robot
 Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
Robot Sensors. Outline. The Robot Structure. Robots and Sensors. Henrik I Christensen
 Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 hic@cc.gatech.edu Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 hic@cc.gatech.edu Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Chapter. 4 Mechanism Design and Analysis
 Chapter. 4 Mechanism Design and Analysis 1 All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
Chapter. 4 Mechanism Design and Analysis 1 All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
E190Q Lecture 5 Autonomous Robot Navigation
 E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
Robotics. Lecture 3: Sensors. See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information.
 Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
Stirling Paatz of robot integrators Barr & Paatz describes the anatomy of an industrial robot.
 Ref BP128 Anatomy Of A Robot Stirling Paatz of robot integrators Barr & Paatz describes the anatomy of an industrial robot. The term robot stems from the Czech word robota, which translates roughly as
Ref BP128 Anatomy Of A Robot Stirling Paatz of robot integrators Barr & Paatz describes the anatomy of an industrial robot. The term robot stems from the Czech word robota, which translates roughly as
Mathieu St-Pierre. Denis Gingras Dr. Ing.
 Comparison between the unscented Kalman filter and the extended Kalman filter for the position estimation module of an integrated navigation information system Mathieu St-Pierre Electrical engineering
Comparison between the unscented Kalman filter and the extended Kalman filter for the position estimation module of an integrated navigation information system Mathieu St-Pierre Electrical engineering
Figure 3.1.2 Cartesian coordinate robot
 Introduction to Robotics, H. Harry Asada Chapter Robot Mechanisms A robot is a machine capable of physical motion for interacting with the environment. Physical interactions include manipulation, locomotion,
Introduction to Robotics, H. Harry Asada Chapter Robot Mechanisms A robot is a machine capable of physical motion for interacting with the environment. Physical interactions include manipulation, locomotion,
CATIA V5 Tutorials. Mechanism Design & Animation. Release 18. Nader G. Zamani. University of Windsor. Jonathan M. Weaver. University of Detroit Mercy
 CATIA V5 Tutorials Mechanism Design & Animation Release 18 Nader G. Zamani University of Windsor Jonathan M. Weaver University of Detroit Mercy SDC PUBLICATIONS Schroff Development Corporation www.schroff.com
CATIA V5 Tutorials Mechanism Design & Animation Release 18 Nader G. Zamani University of Windsor Jonathan M. Weaver University of Detroit Mercy SDC PUBLICATIONS Schroff Development Corporation www.schroff.com
Metrics on SO(3) and Inverse Kinematics
 and Inverse Kinematics") Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Solving Simultaneous Equations and Matrices
 Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
P r oba bi l i sti c R oboti cs. Yrd. Doç. Dr. SIRMA YAVUZ sirma@ce.yildiz.edu.tr Room 130
 P r oba bi l i sti c R oboti cs Yrd. Doç. Dr. SIRMA YAVUZ sirma@ce.yildiz.edu.tr Room 130 Orgazinational Lecture: Thursday 13:00 15:50 Office Hours: Tuesday 13:00-14:00 Thursday 11:00-12:00 Exams: 1 Midterm
P r oba bi l i sti c R oboti cs Yrd. Doç. Dr. SIRMA YAVUZ sirma@ce.yildiz.edu.tr Room 130 Orgazinational Lecture: Thursday 13:00 15:50 Office Hours: Tuesday 13:00-14:00 Thursday 11:00-12:00 Exams: 1 Midterm
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku
 Saeed B. Niku 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik GmbH. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.
Saeed B. Niku 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik GmbH. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF
 Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter (kucsera.peter@kvk.bmf.hu) Abstract In this article an autonomous advertising mobile robot that has been realized in
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter (kucsera.peter@kvk.bmf.hu) Abstract In this article an autonomous advertising mobile robot that has been realized in
1.3.1 Position, Distance and Displacement
 In the previous section, you have come across many examples of motion. You have learnt that to describe the motion of an object we must know its position at different points of time. The position of an
In the previous section, you have come across many examples of motion. You have learnt that to describe the motion of an object we must know its position at different points of time. The position of an
Mobile Robotics I: Lab 2 Dead Reckoning: Autonomous Locomotion Using Odometry
 Mobile Robotics I: Lab 2 Dead Reckoning: Autonomous Locomotion Using Odometry CEENBoT Mobile Robotics Platform Laboratory Series CEENBoT v2.21 '324 Platform The Peter Kiewit Institute of Information Science
Mobile Robotics I: Lab 2 Dead Reckoning: Autonomous Locomotion Using Odometry CEENBoT Mobile Robotics Platform Laboratory Series CEENBoT v2.21 '324 Platform The Peter Kiewit Institute of Information Science
MOBILE ROBOT TRACKING OF PRE-PLANNED PATHS. Department of Computer Science, York University, Heslington, York, Y010 5DD, UK (email:nep@cs.york.ac.
 MOBILE ROBOT TRACKING OF PRE-PLANNED PATHS N. E. Pears Department of Computer Science, York University, Heslington, York, Y010 5DD, UK (email:nep@cs.york.ac.uk) 1 Abstract A method of mobile robot steering
MOBILE ROBOT TRACKING OF PRE-PLANNED PATHS N. E. Pears Department of Computer Science, York University, Heslington, York, Y010 5DD, UK (email:nep@cs.york.ac.uk) 1 Abstract A method of mobile robot steering
Power Electronics. Prof. K. Gopakumar. Centre for Electronics Design and Technology. Indian Institute of Science, Bangalore.
 Power Electronics Prof. K. Gopakumar Centre for Electronics Design and Technology Indian Institute of Science, Bangalore Lecture - 1 Electric Drive Today, we will start with the topic on industrial drive
Power Electronics Prof. K. Gopakumar Centre for Electronics Design and Technology Indian Institute of Science, Bangalore Lecture - 1 Electric Drive Today, we will start with the topic on industrial drive
animation animation shape specification as a function of time
 animation animation shape specification as a function of time animation representation many ways to represent changes with time intent artistic motion physically-plausible motion efficiency control typically
animation animation shape specification as a function of time animation representation many ways to represent changes with time intent artistic motion physically-plausible motion efficiency control typically
Synthetic Sensing: Proximity / Distance Sensors
 Synthetic Sensing: Proximity / Distance Sensors MediaRobotics Lab, February 2010 Proximity detection is dependent on the object of interest. One size does not fit all For non-contact distance measurement,
Synthetic Sensing: Proximity / Distance Sensors MediaRobotics Lab, February 2010 Proximity detection is dependent on the object of interest. One size does not fit all For non-contact distance measurement,
Intelligent Flexible Automation
 Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
Sensor Based Control of Autonomous Wheeled Mobile Robots
 Sensor Based Control of Autonomous Wheeled Mobile Robots Gyula Mester University of Szeged, Department of Informatics e-mail: gmester@inf.u-szeged.hu Abstract The paper deals with the wireless sensor-based
Sensor Based Control of Autonomous Wheeled Mobile Robots Gyula Mester University of Szeged, Department of Informatics e-mail: gmester@inf.u-szeged.hu Abstract The paper deals with the wireless sensor-based
This week. CENG 732 Computer Animation. Challenges in Human Modeling. Basic Arm Model
 CENG 732 Computer Animation Spring 2006-2007 Week 8 Modeling and Animating Articulated Figures: Modeling the Arm, Walking, Facial Animation This week Modeling the arm Different joint structures Walking
CENG 732 Computer Animation Spring 2006-2007 Week 8 Modeling and Animating Articulated Figures: Modeling the Arm, Walking, Facial Animation This week Modeling the arm Different joint structures Walking
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Static Environment Recognition Using Omni-camera from a Moving Vehicle
 Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Interactive Computer Graphics
 Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
Onboard electronics of UAVs
 AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
AARMS Vol. 5, No. 2 (2006) 237 243 TECHNOLOGY Onboard electronics of UAVs ANTAL TURÓCZI, IMRE MAKKAY Department of Electronic Warfare, Miklós Zrínyi National Defence University, Budapest, Hungary Recent
SOLID MECHANICS TUTORIAL MECHANISMS KINEMATICS - VELOCITY AND ACCELERATION DIAGRAMS
 SOLID MECHANICS TUTORIAL MECHANISMS KINEMATICS - VELOCITY AND ACCELERATION DIAGRAMS This work covers elements of the syllabus for the Engineering Council exams C105 Mechanical and Structural Engineering
SOLID MECHANICS TUTORIAL MECHANISMS KINEMATICS - VELOCITY AND ACCELERATION DIAGRAMS This work covers elements of the syllabus for the Engineering Council exams C105 Mechanical and Structural Engineering
TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA
 2015 School of Information Technology and Electrical Engineering at the University of Queensland TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA Schedule Week Date
2015 School of Information Technology and Electrical Engineering at the University of Queensland TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA Schedule Week Date
Robot Perception Continued
 Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
Robotic motion planning for 8- DOF motion stage
 Robotic motion planning for 8- DOF motion stage 12 November Mark Geelen Simon Jansen Alten Mechatronics www.alten.nl rosindustrial@alten.nl Introduction Introduction Alten FEI Motion planning MoveIt! Proof
Robotic motion planning for 8- DOF motion stage 12 November Mark Geelen Simon Jansen Alten Mechatronics www.alten.nl rosindustrial@alten.nl Introduction Introduction Alten FEI Motion planning MoveIt! Proof
A Reliability Point and Kalman Filter-based Vehicle Tracking Technique
 A Reliability Point and Kalman Filter-based Vehicle Tracing Technique Soo Siang Teoh and Thomas Bräunl Abstract This paper introduces a technique for tracing the movement of vehicles in consecutive video
A Reliability Point and Kalman Filter-based Vehicle Tracing Technique Soo Siang Teoh and Thomas Bräunl Abstract This paper introduces a technique for tracing the movement of vehicles in consecutive video
DESIGN, IMPLEMENTATION, AND COOPERATIVE COEVOLUTION OF AN AUTONOMOUS/TELEOPERATED CONTROL SYSTEM FOR A SERPENTINE ROBOTIC MANIPULATOR
 Proceedings of the American Nuclear Society Ninth Topical Meeting on Robotics and Remote Systems, Seattle Washington, March 2001. DESIGN, IMPLEMENTATION, AND COOPERATIVE COEVOLUTION OF AN AUTONOMOUS/TELEOPERATED
Proceedings of the American Nuclear Society Ninth Topical Meeting on Robotics and Remote Systems, Seattle Washington, March 2001. DESIGN, IMPLEMENTATION, AND COOPERATIVE COEVOLUTION OF AN AUTONOMOUS/TELEOPERATED
Least-Squares Intersection of Lines
 Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
KINEMATICS OF PARTICLES RELATIVE MOTION WITH RESPECT TO TRANSLATING AXES
 KINEMTICS OF PRTICLES RELTIVE MOTION WITH RESPECT TO TRNSLTING XES In the previous articles, we have described particle motion using coordinates with respect to fixed reference axes. The displacements,
KINEMTICS OF PRTICLES RELTIVE MOTION WITH RESPECT TO TRNSLTING XES In the previous articles, we have described particle motion using coordinates with respect to fixed reference axes. The displacements,
Development of Docking System for Mobile Robots Using Cheap Infrared Sensors
 Development of Docking System for Mobile Robots Using Cheap Infrared Sensors K. H. Kim a, H. D. Choi a, S. Yoon a, K. W. Lee a, H. S. Ryu b, C. K. Woo b, and Y. K. Kwak a, * a Department of Mechanical
Development of Docking System for Mobile Robots Using Cheap Infrared Sensors K. H. Kim a, H. D. Choi a, S. Yoon a, K. W. Lee a, H. S. Ryu b, C. K. Woo b, and Y. K. Kwak a, * a Department of Mechanical
Force/position control of a robotic system for transcranial magnetic stimulation
 Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
MSc in Autonomous Robotics Engineering University of York
 MSc in Autonomous Robotics Engineering University of York Practical Robotics Module 2015 A Mobile Robot Navigation System: Labs 1a, 1b, 2a, 2b. Associated lectures: Lecture 1 and lecture 2, given by Nick
MSc in Autonomous Robotics Engineering University of York Practical Robotics Module 2015 A Mobile Robot Navigation System: Labs 1a, 1b, 2a, 2b. Associated lectures: Lecture 1 and lecture 2, given by Nick
Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and Motion Optimization for Maritime Robotic Research
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Intelligent Submersible Manipulator-Robot, Design, Modeling, Simulation and
Design of a Robotic Arm with Gripper & End Effector for Spot Welding
 Universal Journal of Mechanical Engineering 1(3): 92-97, 2013 DOI: 10.13189/ujme.2013.010303 http://www.hrpub.org Design of a Robotic Arm with Gripper & End Effector for Spot Welding Puran Singh *, Anil
Universal Journal of Mechanical Engineering 1(3): 92-97, 2013 DOI: 10.13189/ujme.2013.010303 http://www.hrpub.org Design of a Robotic Arm with Gripper & End Effector for Spot Welding Puran Singh *, Anil
Automated Process for Generating Digitised Maps through GPS Data Compression
 Automated Process for Generating Digitised Maps through GPS Data Compression Stewart Worrall and Eduardo Nebot University of Sydney, Australia {s.worrall, e.nebot}@acfr.usyd.edu.au Abstract This paper
Automated Process for Generating Digitised Maps through GPS Data Compression Stewart Worrall and Eduardo Nebot University of Sydney, Australia {s.worrall, e.nebot}@acfr.usyd.edu.au Abstract This paper
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
Tutorial 1. Introduction to robot
 Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
INTRODUCTION TO SERIAL ARM
 INTRODUCTION TO SERIAL ARM A robot manipulator consists of links connected by joints. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of
INTRODUCTION TO SERIAL ARM A robot manipulator consists of links connected by joints. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of
2After completing this chapter you should be able to
 After completing this chapter you should be able to solve problems involving motion in a straight line with constant acceleration model an object moving vertically under gravity understand distance time
After completing this chapter you should be able to solve problems involving motion in a straight line with constant acceleration model an object moving vertically under gravity understand distance time
Lecture L5 - Other Coordinate Systems
 S. Widnall, J. Peraire 16.07 Dynamics Fall 008 Version.0 Lecture L5 - Other Coordinate Systems In this lecture, we will look at some other common systems of coordinates. We will present polar coordinates
S. Widnall, J. Peraire 16.07 Dynamics Fall 008 Version.0 Lecture L5 - Other Coordinate Systems In this lecture, we will look at some other common systems of coordinates. We will present polar coordinates
Understanding and Applying Kalman Filtering
 Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Active Vibration Isolation of an Unbalanced Machine Spindle
 UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
Online Model Predictive Control of a Robotic System by Combining Simulation and Optimization
 Mohammad Rokonuzzaman Pappu Online Model Predictive Control of a Robotic System by Combining Simulation and Optimization School of Electrical Engineering Department of Electrical Engineering and Automation
Mohammad Rokonuzzaman Pappu Online Model Predictive Control of a Robotic System by Combining Simulation and Optimization School of Electrical Engineering Department of Electrical Engineering and Automation
Applications > Robotics research and education > Assistant robot at home > Surveillance > Tele-presence > Entertainment/Education > Cleaning
 Introduction robulab 10 is a multi-purpose mobile robot designed for various indoor applications, such as research and education, tele-presence, assistance to people staying at home. robulab 10 is a generic
Introduction robulab 10 is a multi-purpose mobile robot designed for various indoor applications, such as research and education, tele-presence, assistance to people staying at home. robulab 10 is a generic
Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist
 Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist MHER GRIGORIAN, TAREK SOBH Department of Computer Science and Engineering, U. of Bridgeport, USA ABSTRACT Robot
Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist MHER GRIGORIAN, TAREK SOBH Department of Computer Science and Engineering, U. of Bridgeport, USA ABSTRACT Robot
Deterministic Sampling-based Switching Kalman Filtering for Vehicle Tracking
 Proceedings of the IEEE ITSC 2006 2006 IEEE Intelligent Transportation Systems Conference Toronto, Canada, September 17-20, 2006 WA4.1 Deterministic Sampling-based Switching Kalman Filtering for Vehicle
Proceedings of the IEEE ITSC 2006 2006 IEEE Intelligent Transportation Systems Conference Toronto, Canada, September 17-20, 2006 WA4.1 Deterministic Sampling-based Switching Kalman Filtering for Vehicle
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D225 TUTORIAL 1 LINEAR AND ANGULAR DISPLACEMENT, VELOCITY AND ACCELERATION
 ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D225 TUTORIAL 1 LINEAR AND ANGULAR DISPLACEMENT, VELOCITY AND ACCELERATION This tutorial covers pre-requisite material and should be skipped if you are
ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D225 TUTORIAL 1 LINEAR AND ANGULAR DISPLACEMENT, VELOCITY AND ACCELERATION This tutorial covers pre-requisite material and should be skipped if you are
Physics 2A, Sec B00: Mechanics -- Winter 2011 Instructor: B. Grinstein Final Exam
 Physics 2A, Sec B00: Mechanics -- Winter 2011 Instructor: B. Grinstein Final Exam INSTRUCTIONS: Use a pencil #2 to fill your scantron. Write your code number and bubble it in under "EXAM NUMBER;" an entry
Physics 2A, Sec B00: Mechanics -- Winter 2011 Instructor: B. Grinstein Final Exam INSTRUCTIONS: Use a pencil #2 to fill your scantron. Write your code number and bubble it in under "EXAM NUMBER;" an entry
Microcontrollers, Actuators and Sensors in Mobile Robots
 SISY 2006 4 th Serbian-Hungarian Joint Symposium on Intelligent Systems Microcontrollers, Actuators and Sensors in Mobile Robots István Matijevics Polytechnical Engineering College, Subotica, Serbia mistvan@vts.su.ac.yu
SISY 2006 4 th Serbian-Hungarian Joint Symposium on Intelligent Systems Microcontrollers, Actuators and Sensors in Mobile Robots István Matijevics Polytechnical Engineering College, Subotica, Serbia mistvan@vts.su.ac.yu
- 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering
 - 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering Fall 2005 1 Chapter 1 Introduction Many definitions have been suggested for what we call a robot. The word may conjure up
- 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering Fall 2005 1 Chapter 1 Introduction Many definitions have been suggested for what we call a robot. The word may conjure up
Pricing and calibration in local volatility models via fast quantization
 Pricing and calibration in local volatility models via fast quantization Parma, 29 th January 2015. Joint work with Giorgia Callegaro and Martino Grasselli Quantization: a brief history Birth: back to
Pricing and calibration in local volatility models via fast quantization Parma, 29 th January 2015. Joint work with Giorgia Callegaro and Martino Grasselli Quantization: a brief history Birth: back to
INTRODUCTION. Robotics is a relatively young field of modern technology that crosses traditional
 1 INTRODUCTION Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires knowledge
1 INTRODUCTION Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires knowledge
Computer Graphics. Geometric Modeling. Page 1. Copyright Gotsman, Elber, Barequet, Karni, Sheffer Computer Science - Technion. An Example.
 An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
Designing Behavior-Based Systems
 Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
Submitted By: Submitted To: XYZ ABCD ******** Mechatronics
 Submitted To: ABCD Submitted By: XYZ ******** Mechatronics END EFFECTORS In robotics, an end effector is the device at the end of a robotic arm, designed to interact with the environment. The exact nature
Submitted To: ABCD Submitted By: XYZ ******** Mechatronics END EFFECTORS In robotics, an end effector is the device at the end of a robotic arm, designed to interact with the environment. The exact nature
Aerospace Information Technology Topics for Internships and Bachelor s and Master s Theses
 Aerospace Information Technology s for Internships and Bachelor s and Master s Theses Version Nov. 2014 The Chair of Aerospace Information Technology addresses several research topics in the area of: Avionic
Aerospace Information Technology s for Internships and Bachelor s and Master s Theses Version Nov. 2014 The Chair of Aerospace Information Technology addresses several research topics in the area of: Avionic
LEGO NXT-based Robotic Arm
 Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University barna.resko@arek.uni-obuda.hu, hamoriakos@gmail.com, polish1987@gmail.com
Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University barna.resko@arek.uni-obuda.hu, hamoriakos@gmail.com, polish1987@gmail.com
Basic Principles of Inertial Navigation. Seminar on inertial navigation systems Tampere University of Technology
 Basic Principles of Inertial Navigation Seminar on inertial navigation systems Tampere University of Technology 1 The five basic forms of navigation Pilotage, which essentially relies on recognizing landmarks
Basic Principles of Inertial Navigation Seminar on inertial navigation systems Tampere University of Technology 1 The five basic forms of navigation Pilotage, which essentially relies on recognizing landmarks
A STRATEGIC PLANNER FOR ROBOT EXCAVATION' by Humberto Romero-Lois, Research Assistant, Department of Civil Engineering
 A STRATEGIC PLANNER FOR ROBOT EXCAVATION' by Humberto Romero-Lois, Research Assistant, Department of Civil Engineering Chris Hendrickson, Professor, Department of Civil Engineering, and Irving Oppenheim,
A STRATEGIC PLANNER FOR ROBOT EXCAVATION' by Humberto Romero-Lois, Research Assistant, Department of Civil Engineering Chris Hendrickson, Professor, Department of Civil Engineering, and Irving Oppenheim,
CALIBRATION OF A ROBUST 2 DOF PATH MONITORING TOOL FOR INDUSTRIAL ROBOTS AND MACHINE TOOLS BASED ON PARALLEL KINEMATICS
 CALIBRATION OF A ROBUST 2 DOF PATH MONITORING TOOL FOR INDUSTRIAL ROBOTS AND MACHINE TOOLS BASED ON PARALLEL KINEMATICS E. Batzies 1, M. Kreutzer 1, D. Leucht 2, V. Welker 2, O. Zirn 1 1 Mechatronics Research
CALIBRATION OF A ROBUST 2 DOF PATH MONITORING TOOL FOR INDUSTRIAL ROBOTS AND MACHINE TOOLS BASED ON PARALLEL KINEMATICS E. Batzies 1, M. Kreutzer 1, D. Leucht 2, V. Welker 2, O. Zirn 1 1 Mechatronics Research
ROBOT END EFFECTORS SCRIPT
 Slide 1 Slide 2 Slide 3 Slide 4 An end effector is the business end of a robot or where the work occurs. It is the device that is designed to allow the robot to interact with its environment. Similar in
Slide 1 Slide 2 Slide 3 Slide 4 An end effector is the business end of a robot or where the work occurs. It is the device that is designed to allow the robot to interact with its environment. Similar in
Part-Based Recognition
 Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM
 Advances in Production Engineering & Management 4 (2009) 4, 255-262 ISSN 1854-6250 Technical paper GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM Ata, A., A.*; Elaryan, M.**; Gemaee, M.**;
Advances in Production Engineering & Management 4 (2009) 4, 255-262 ISSN 1854-6250 Technical paper GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM Ata, A., A.*; Elaryan, M.**; Gemaee, M.**;
ANALYTICAL METHODS FOR ENGINEERS
 UNIT 1: Unit code: QCF Level: 4 Credit value: 15 ANALYTICAL METHODS FOR ENGINEERS A/601/1401 OUTCOME - TRIGONOMETRIC METHODS TUTORIAL 1 SINUSOIDAL FUNCTION Be able to analyse and model engineering situations
UNIT 1: Unit code: QCF Level: 4 Credit value: 15 ANALYTICAL METHODS FOR ENGINEERS A/601/1401 OUTCOME - TRIGONOMETRIC METHODS TUTORIAL 1 SINUSOIDAL FUNCTION Be able to analyse and model engineering situations
Representing Vector Fields Using Field Line Diagrams
 Minds On Physics Activity FFá2 5 Representing Vector Fields Using Field Line Diagrams Purpose and Expected Outcome One way of representing vector fields is using arrows to indicate the strength and direction
Minds On Physics Activity FFá2 5 Representing Vector Fields Using Field Line Diagrams Purpose and Expected Outcome One way of representing vector fields is using arrows to indicate the strength and direction
Time Domain and Frequency Domain Techniques For Multi Shaker Time Waveform Replication
 Time Domain and Frequency Domain Techniques For Multi Shaker Time Waveform Replication Thomas Reilly Data Physics Corporation 1741 Technology Drive, Suite 260 San Jose, CA 95110 (408) 216-8440 This paper
Time Domain and Frequency Domain Techniques For Multi Shaker Time Waveform Replication Thomas Reilly Data Physics Corporation 1741 Technology Drive, Suite 260 San Jose, CA 95110 (408) 216-8440 This paper
FRC WPI Robotics Library Overview
 FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
Operational Space Control for A Scara Robot
 Operational Space Control for A Scara Robot Francisco Franco Obando D., Pablo Eduardo Caicedo R., Oscar Andrés Vivas A. Universidad del Cauca, {fobando, pacaicedo, avivas }@unicauca.edu.co Abstract This
Operational Space Control for A Scara Robot Francisco Franco Obando D., Pablo Eduardo Caicedo R., Oscar Andrés Vivas A. Universidad del Cauca, {fobando, pacaicedo, avivas }@unicauca.edu.co Abstract This
Worksheet 1. What You Need to Know About Motion Along the x-axis (Part 1)
") Worksheet 1. What You Need to Know About Motion Along the x-axis (Part 1) In discussing motion, there are three closely related concepts that you need to keep straight. These are: If x(t) represents the
Worksheet 1. What You Need to Know About Motion Along the x-axis (Part 1) In discussing motion, there are three closely related concepts that you need to keep straight. These are: If x(t) represents the
Design of a six Degree-of-Freedom Articulated Robotic Arm for Manufacturing Electrochromic Nanofilms
 Abstract Design of a six Degree-of-Freedom Articulated Robotic Arm for Manufacturing Electrochromic Nanofilms by Maxine Emerich Advisor: Dr. Scott Pierce The subject of this report is the development of
Abstract Design of a six Degree-of-Freedom Articulated Robotic Arm for Manufacturing Electrochromic Nanofilms by Maxine Emerich Advisor: Dr. Scott Pierce The subject of this report is the development of
Intuitive Navigation in an Enormous Virtual Environment
 / International Conference on Artificial Reality and Tele-Existence 98 Intuitive Navigation in an Enormous Virtual Environment Yoshifumi Kitamura Shinji Fukatsu Toshihiro Masaki Fumio Kishino Graduate
/ International Conference on Artificial Reality and Tele-Existence 98 Intuitive Navigation in an Enormous Virtual Environment Yoshifumi Kitamura Shinji Fukatsu Toshihiro Masaki Fumio Kishino Graduate
Automatic Labeling of Lane Markings for Autonomous Vehicles
 Automatic Labeling of Lane Markings for Autonomous Vehicles Jeffrey Kiske Stanford University 450 Serra Mall, Stanford, CA 94305 jkiske@stanford.edu 1. Introduction As autonomous vehicles become more popular,
Automatic Labeling of Lane Markings for Autonomous Vehicles Jeffrey Kiske Stanford University 450 Serra Mall, Stanford, CA 94305 jkiske@stanford.edu 1. Introduction As autonomous vehicles become more popular,
Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors
 Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
Using angular speed measurement with Hall effect sensors to observe grinding operation with flexible robot.
 Using angular speed measurement with Hall effect sensors to observe grinding operation with flexible robot. François Girardin 1, Farzad Rafieian 1, Zhaoheng Liu 1, Marc Thomas 1 and Bruce Hazel 2 1 Laboratoire
Using angular speed measurement with Hall effect sensors to observe grinding operation with flexible robot. François Girardin 1, Farzad Rafieian 1, Zhaoheng Liu 1, Marc Thomas 1 and Bruce Hazel 2 1 Laboratoire
SOLID MECHANICS BALANCING TUTORIAL BALANCING OF ROTATING BODIES
 SOLID MECHANICS BALANCING TUTORIAL BALANCING OF ROTATING BODIES This work covers elements of the syllabus for the Edexcel module 21722P HNC/D Mechanical Principles OUTCOME 4. On completion of this tutorial
SOLID MECHANICS BALANCING TUTORIAL BALANCING OF ROTATING BODIES This work covers elements of the syllabus for the Edexcel module 21722P HNC/D Mechanical Principles OUTCOME 4. On completion of this tutorial
An inertial haptic interface for robotic applications
 An inertial haptic interface for robotic applications Students: Andrea Cirillo Pasquale Cirillo Advisor: Ing. Salvatore Pirozzi Altera Innovate Italy Design Contest 2012 Objective Build a Low Cost Interface
An inertial haptic interface for robotic applications Students: Andrea Cirillo Pasquale Cirillo Advisor: Ing. Salvatore Pirozzi Altera Innovate Italy Design Contest 2012 Objective Build a Low Cost Interface
Introduction to Robotics. Vikram Kapila, Associate Professor, Mechanical Engineering
 Introduction to Robotics Vikram Kapila, Associate Professor, Mechanical Engineering Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was
Introduction to Robotics Vikram Kapila, Associate Professor, Mechanical Engineering Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was
INTRODUCTION TO ROBOTICS. Dr. Bob Williams, williar4@ohio.edu, Ohio University
 INTRODUCTION TO ROBOTICS Dr. Bob Williams, williar4@ohio.edu, Ohio University History Leonardo da Vinci created many robot-like sketches and designs in the 1500 s. The word robot first appeared in print
INTRODUCTION TO ROBOTICS Dr. Bob Williams, williar4@ohio.edu, Ohio University History Leonardo da Vinci created many robot-like sketches and designs in the 1500 s. The word robot first appeared in print
Sensor Modeling for a Walking Robot Simulation. 1 Introduction
 Sensor Modeling for a Walking Robot Simulation L. France, A. Girault, J-D. Gascuel, B. Espiau INRIA, Grenoble, FRANCE imagis, GRAVIR/IMAG, Grenoble, FRANCE Abstract This paper proposes models of short-range
Sensor Modeling for a Walking Robot Simulation L. France, A. Girault, J-D. Gascuel, B. Espiau INRIA, Grenoble, FRANCE imagis, GRAVIR/IMAG, Grenoble, FRANCE Abstract This paper proposes models of short-range
Robotics and Automation Blueprint
 Robotics and Automation Blueprint This Blueprint contains the subject matter content of this Skill Connect Assessment. This Blueprint does NOT contain the information one would need to fully prepare for
Robotics and Automation Blueprint This Blueprint contains the subject matter content of this Skill Connect Assessment. This Blueprint does NOT contain the information one would need to fully prepare for
AN INTERACTIVE USER INTERFACE TO THE MOBILITY OBJECT MANAGER FOR RWI ROBOTS
 AN INTERACTIVE USER INTERFACE TO THE MOBILITY OBJECT MANAGER FOR RWI ROBOTS Innocent Okoloko and Huosheng Hu Department of Computer Science, University of Essex Colchester Essex C04 3SQ, United Kingdom
AN INTERACTIVE USER INTERFACE TO THE MOBILITY OBJECT MANAGER FOR RWI ROBOTS Innocent Okoloko and Huosheng Hu Department of Computer Science, University of Essex Colchester Essex C04 3SQ, United Kingdom
Automotive Applications of 3D Laser Scanning Introduction
 Automotive Applications of 3D Laser Scanning Kyle Johnston, Ph.D., Metron Systems, Inc. 34935 SE Douglas Street, Suite 110, Snoqualmie, WA 98065 425-396-5577, www.metronsys.com 2002 Metron Systems, Inc
Automotive Applications of 3D Laser Scanning Kyle Johnston, Ph.D., Metron Systems, Inc. 34935 SE Douglas Street, Suite 110, Snoqualmie, WA 98065 425-396-5577, www.metronsys.com 2002 Metron Systems, Inc