Traffic Monitoring Systems. Technology and sensors
|
|
|
- Edwina Ward
- 10 years ago
- Views:
Transcription
1 Traffic Monitoring Systems Technology and sensors

2 Technology Inductive loops Cameras Lidar/Ladar and laser Radar GPS etc

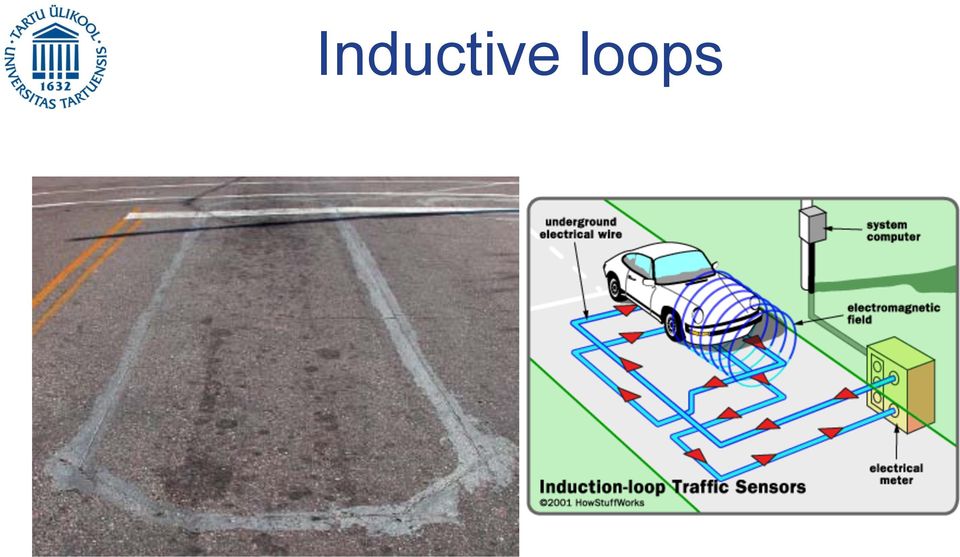
3 Inductive loops
4 Inductive loops signals

5 Inductive loop sensor The inductance signal decreases when a car pass through the loop Inductance Time t off t on 0 T = t on T = t off

6 Inductive loop sensor Inductance High low Tn t n1 t n2 t n3 T n+1 Time Loops can measure: Occupancy (percentage of time loop is occipied per interval) Volume (vehicle per interval)
 Volume (vehicle per")
7 Inductive loop sensor How can we get speed from loops: s = EVL t o s = speed (m/sec) EVL = effective vehicle length (m) t o = occupancy time (s) EVL ~ (vehicle length + detector length)
 EVL ~ (vehicle length + detector")
8 Inductive loop sensor Estimating speed s = T N O g 3600 sec hr s = speed (km/hr) N = number of vehicles in the observation interval T = observation interval (s) O = percentage of time the loop is occupied by vehicles during the observation interval (occupancy) g = speed estimation parameter g = 1000 m / km EVL converts percent to decimal
 g = speed estimation parameter g = 1000 m / km EVL 100 100 converts")
9 Inductive loop sensor Is this speed estimation a TMS or SMS?

10 Video surveillance

11 Video surveillance Detection and tracking of moving objects Interpret movement of the moving objects and their patterns behaviors. This will allow us: Minimize the user interaction, the cost and the time. Reduce traffic jams, accidents, and identifying suspicious vehicles or events.

12 Video surveillance for traffic monitoring system Should be capable of: Adaptive to changes that occurs in real world Operating independently of human operators Easy to set up Making decisions Working in real time

13 Vehicle detection Model based detection Region based detection Active contour based detection Feature based detection

14 Model based tracking Vehicle detection Recovering trajectories and models for small number of vehicle with high accuracy Weakness: Not good with geometric details Not realistic (you can not know all kind of vehicles models )

15 Vehicle detection Region based tracking Detect each vehicle blob using cross correlation function. Vehicle detection is based on background subtraction. Weakness: Hard to detect vehicle in traffic jams due to occlusion phenomena. Potential segmentation problem

16 Vehicle detection Snakes/ active contour detection Tracking is based on active contour models or snakes Reduce computational complexity compared to region based detection Representing objects in bounding contour Weakness: Can not detect vehicle that are occluded

17 Feature based detection Vehicle detection Track specific sub-feature present on the vehicle Performance depends on the motion constraints

18 Vehicle tracking Background subtraction Image comparison (reference background image) Sensitive to background change Suitable for static environment

19 Vehicle tracking Temporal differencing Checking intensity evolution in the images (moving object has the tendency to change intensity faster than static ones) Use chronological frames to detect the changes Weakness: Extracting all the relevant features Number of frames used in the analysis can affect the performance

20 Vehicle tracking Optical flow Characteristics Identification using flow vectors of moving objects Weakness: Can be very slow to run in real time.

21 Vehicle tracking procedure Frame t Frame t-1 Feature detection Feature tracking Displacement estimation Background compensation Change detection Moving regions detection Object tracking classification
22 Radar
23 Radar The radar data has a horizontal range Bearing angles (vertical: up is left and down is right) Brightness indicated strength of the return
24 Ladar, lidar and laser
25 Ladar, lidar and laser They all use travel time of laser beam to measure distance. The laser beam can be scanned to create a range image using mirrors. Lasers can be focus to very small spots Ladar is near visible light therefore can be blocked by fog, snow, heavy rain, etc
26 Ladar, lidar and laser
27 GPS
28 GPS About 31 satellites with very high orbits Several ones are replaced every year
29 GPS
30 GPS Intersecting Spheres But only 1 point is on the Earth
31 GPS Satellite Original GPS data Clarified GPS data
32 :2 1 15:2 8 15:3 6 15:4 3 15:50 15:57 16 : :12 GPS Data Cellular Data Cellular data Direction of travel Cell Cell Cell Flow pattern Analyzed against GPS drive data And adjustments made to pattern model Speed (km/h) Cellular-GPS Comparison TIme Iterative process Overlaid on Navigation quality GIS Creates sample observer to observe flow patterns
33 Cellular data Handover event GPS data Location area derived from location module
34 Cellular data
35 Cellular data
36 Cellular data
A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA
 A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA N. Zarrinpanjeh a, F. Dadrassjavan b, H. Fattahi c * a Islamic Azad University of Qazvin - [email protected]
A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA N. Zarrinpanjeh a, F. Dadrassjavan b, H. Fattahi c * a Islamic Azad University of Qazvin - [email protected]
Robot Perception Continued
 Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
A wireless sensor network for traffic surveillance
 A wireless sensor network for traffic surveillance Sing Yiu Cheung, Sinem Coleri, Ram Rajagopal, Pravin Varaiya University of California, Berkeley Outline Traffic measurement Wireless Sensor Networks Vehicle
A wireless sensor network for traffic surveillance Sing Yiu Cheung, Sinem Coleri, Ram Rajagopal, Pravin Varaiya University of California, Berkeley Outline Traffic measurement Wireless Sensor Networks Vehicle
IP-S2 Compact+ 3D Mobile Mapping System
 IP-S2 Compact+ 3D Mobile Mapping System 3D scanning of road and roadside features Delivers high density point clouds and 360 spherical imagery High accuracy IMU options without export control Simple Map,
IP-S2 Compact+ 3D Mobile Mapping System 3D scanning of road and roadside features Delivers high density point clouds and 360 spherical imagery High accuracy IMU options without export control Simple Map,
False alarm in outdoor environments
 Accepted 1.0 Savantic letter 1(6) False alarm in outdoor environments Accepted 1.0 Savantic letter 2(6) Table of contents Revision history 3 References 3 1 Introduction 4 2 Pre-processing 4 3 Detection,
Accepted 1.0 Savantic letter 1(6) False alarm in outdoor environments Accepted 1.0 Savantic letter 2(6) Table of contents Revision history 3 References 3 1 Introduction 4 2 Pre-processing 4 3 Detection,
T-REDSPEED White paper
 T-REDSPEED White paper Index Index...2 Introduction...3 Specifications...4 Innovation...6 Technology added values...7 Introduction T-REDSPEED is an international patent pending technology for traffic violation
T-REDSPEED White paper Index Index...2 Introduction...3 Specifications...4 Innovation...6 Technology added values...7 Introduction T-REDSPEED is an international patent pending technology for traffic violation
UAV Road Surface Monitoring and Traffic Information
 UAV Road Surface Monitoring and Traffic Information Czech Road and Motorway Network New capabilities for Unmanned Aerial Systems Current usage (military operation service) Possible civil usage (possible
UAV Road Surface Monitoring and Traffic Information Czech Road and Motorway Network New capabilities for Unmanned Aerial Systems Current usage (military operation service) Possible civil usage (possible
IP-S3 HD1. Compact, High-Density 3D Mobile Mapping System
 IP-S3 HD1 Compact, High-Density 3D Mobile Mapping System Integrated, turnkey solution Ultra-compact design Multiple lasers minimize scanning shades Unparalleled ease-of-use No user calibration required
IP-S3 HD1 Compact, High-Density 3D Mobile Mapping System Integrated, turnkey solution Ultra-compact design Multiple lasers minimize scanning shades Unparalleled ease-of-use No user calibration required
How To Fuse A Point Cloud With A Laser And Image Data From A Pointcloud
 REAL TIME 3D FUSION OF IMAGERY AND MOBILE LIDAR Paul Mrstik, Vice President Technology Kresimir Kusevic, R&D Engineer Terrapoint Inc. 140-1 Antares Dr. Ottawa, Ontario K2E 8C4 Canada [email protected]
REAL TIME 3D FUSION OF IMAGERY AND MOBILE LIDAR Paul Mrstik, Vice President Technology Kresimir Kusevic, R&D Engineer Terrapoint Inc. 140-1 Antares Dr. Ottawa, Ontario K2E 8C4 Canada [email protected]
Automatic Traffic Estimation Using Image Processing
 Automatic Traffic Estimation Using Image Processing Pejman Niksaz Science &Research Branch, Azad University of Yazd, Iran [email protected] Abstract As we know the population of city and number of
Automatic Traffic Estimation Using Image Processing Pejman Niksaz Science &Research Branch, Azad University of Yazd, Iran [email protected] Abstract As we know the population of city and number of
High Tech Electronics
 10011010010100011110101010010101010101010101010101010101010101010101010101010101010101010 11010101010101010101010101010101010101010101010101010101010101010101010101101010101010101 High Tech Electronics
10011010010100011110101010010101010101010101010101010101010101010101010101010101010101010 11010101010101010101010101010101010101010101010101010101010101010101010101101010101010101 High Tech Electronics
VEHICLE TRACKING AND SPEED ESTIMATION SYSTEM CHAN CHIA YIK. Report submitted in partial fulfillment of the requirements
 VEHICLE TRACKING AND SPEED ESTIMATION SYSTEM CHAN CHIA YIK Report submitted in partial fulfillment of the requirements for the award of the degree of Bachelor of Computer System & Software Engineering
VEHICLE TRACKING AND SPEED ESTIMATION SYSTEM CHAN CHIA YIK Report submitted in partial fulfillment of the requirements for the award of the degree of Bachelor of Computer System & Software Engineering
A SPECIAL APPLICATION OF A VIDEO-IMAGE SYSTEM FOR VEHICLE TRACKING AND SPEED MEASUREMENT
 A SPECIAL APPLICATION OF A VIDEO-IMAGE SYSTEM FOR VEHICLE TRACKING AND SPEED MEASUREMENT Zong Tian (Corresponding Author) Texas Transportation Institute The Texas A&M University System College Station,
A SPECIAL APPLICATION OF A VIDEO-IMAGE SYSTEM FOR VEHICLE TRACKING AND SPEED MEASUREMENT Zong Tian (Corresponding Author) Texas Transportation Institute The Texas A&M University System College Station,
A REVIEW ON KALMAN FILTER FOR GPS TRACKING
 A REVIEW ON KALMAN FILTER FOR GPS TRACKING Ms. SONAL(Student, M.Tech ), Dr. AJIT SINGH (Professor in CSE & IT) Computer Science & Engg. (Network Security) BPS Mahila Vishwavidyalaya Khanpur Kalan, Haryana
A REVIEW ON KALMAN FILTER FOR GPS TRACKING Ms. SONAL(Student, M.Tech ), Dr. AJIT SINGH (Professor in CSE & IT) Computer Science & Engg. (Network Security) BPS Mahila Vishwavidyalaya Khanpur Kalan, Haryana
Digital Remote Sensing Data Processing Digital Remote Sensing Data Processing and Analysis: An Introduction and Analysis: An Introduction
 Digital Remote Sensing Data Processing Digital Remote Sensing Data Processing and Analysis: An Introduction and Analysis: An Introduction Content Remote sensing data Spatial, spectral, radiometric and
Digital Remote Sensing Data Processing Digital Remote Sensing Data Processing and Analysis: An Introduction and Analysis: An Introduction Content Remote sensing data Spatial, spectral, radiometric and
Advanced Methods for Pedestrian and Bicyclist Sensing
 Advanced Methods for Pedestrian and Bicyclist Sensing Yinhai Wang PacTrans STAR Lab University of Washington Email: [email protected] Tel: 1-206-616-2696 For Exchange with University of Nevada Reno Sept. 25,
Advanced Methods for Pedestrian and Bicyclist Sensing Yinhai Wang PacTrans STAR Lab University of Washington Email: [email protected] Tel: 1-206-616-2696 For Exchange with University of Nevada Reno Sept. 25,
The Telematics Application Innovation Based On the Big Data. China Telecom Transportation ICT Application Base(Shanghai)
") The Telematics Application Innovation Based On the Big Data China Telecom Transportation ICT Application Base(Shanghai) Big Data be the basis for Telematics Innovation Providing service s based on the
The Telematics Application Innovation Based On the Big Data China Telecom Transportation ICT Application Base(Shanghai) Big Data be the basis for Telematics Innovation Providing service s based on the
Mobile 360 Degree Imagery: Cost Effective Rail Network Asset Management October 22nd, 2015. Eric McCuaig, Trimble Navigation
 Mobile 360 Degree Imagery: Cost Effective Rail Network Asset Management October 22nd, 2015 Eric McCuaig, Trimble Navigation The debate: Point Clouds vs. Imagery Both are useful pick the right tool for
Mobile 360 Degree Imagery: Cost Effective Rail Network Asset Management October 22nd, 2015 Eric McCuaig, Trimble Navigation The debate: Point Clouds vs. Imagery Both are useful pick the right tool for
Last Mile Intelligent Driving in Urban Mobility
 底 盘 电 子 控 制 系 统 研 究 室 Chassis Electronic Control Systems Laboratory 姓 学 名 号 Hui CHEN School 学 of 院 ( Automotive 系 ) Studies, Tongji University, Shanghai, China 学 科 专 业 [email protected] 指 导 老 师 陈
底 盘 电 子 控 制 系 统 研 究 室 Chassis Electronic Control Systems Laboratory 姓 学 名 号 Hui CHEN School 学 of 院 ( Automotive 系 ) Studies, Tongji University, Shanghai, China 学 科 专 业 [email protected] 指 导 老 师 陈
A method of generating free-route walk-through animation using vehicle-borne video image
 A method of generating free-route walk-through animation using vehicle-borne video image Jun KUMAGAI* Ryosuke SHIBASAKI* *Graduate School of Frontier Sciences, Shibasaki lab. University of Tokyo 4-6-1
A method of generating free-route walk-through animation using vehicle-borne video image Jun KUMAGAI* Ryosuke SHIBASAKI* *Graduate School of Frontier Sciences, Shibasaki lab. University of Tokyo 4-6-1
Global Positioning Monitoring System for Electric Vehicle Fleets (GPMS)
") Global Positioning Monitoring System for Electric Vehicle Fleets (GPMS) S. TSELEPIS, T. ROMANOS Center for Renewable Energy Sources, CRES 19th Km Marathonos Ave. Pikermi, 19 9, Greece Tel. (31) 639 9,
Global Positioning Monitoring System for Electric Vehicle Fleets (GPMS) S. TSELEPIS, T. ROMANOS Center for Renewable Energy Sources, CRES 19th Km Marathonos Ave. Pikermi, 19 9, Greece Tel. (31) 639 9,
Development of an Automotive Active Safety System Using a 24 GHz-band High Resolution Multi-Mode Radar
 Special Issue Automobile Electronics Development of an Automotive Active Safety System Using a 24 GHz-band High Resolution Multi-Mode Yasushi Aoyagi* 1, Keisuke Morii* 1, Yoshiyuki Ishida* 1, Takashi Kawate*
Special Issue Automobile Electronics Development of an Automotive Active Safety System Using a 24 GHz-band High Resolution Multi-Mode Yasushi Aoyagi* 1, Keisuke Morii* 1, Yoshiyuki Ishida* 1, Takashi Kawate*
An Energy-Based Vehicle Tracking System using Principal Component Analysis and Unsupervised ART Network
 Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '9) ISSN: 179-519 435 ISBN: 978-96-474-51-2 An Energy-Based Vehicle Tracking System using Principal
Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '9) ISSN: 179-519 435 ISBN: 978-96-474-51-2 An Energy-Based Vehicle Tracking System using Principal
How GPS works? WHAT IS GPS? HOW TRACKING WORKS?
 WHAT IS GPS? The Global Positioning System (GPS) is a satellite-based navigation system made up of a network of 24 satellites placed into orbit by the U.S. Department of Defense. GPS was originally intended
WHAT IS GPS? The Global Positioning System (GPS) is a satellite-based navigation system made up of a network of 24 satellites placed into orbit by the U.S. Department of Defense. GPS was originally intended
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
Automated Pavement Distress Survey: A Review and A New Direction
 Automated Pavement Distress Survey: A Review and A New Direction KELVIN C.P. WANG AND WEIGUO GONG 4190 Bell Engineering Civil Engineering University of Arkansas, Fayetteville, AR 72701 Email: [email protected]
Automated Pavement Distress Survey: A Review and A New Direction KELVIN C.P. WANG AND WEIGUO GONG 4190 Bell Engineering Civil Engineering University of Arkansas, Fayetteville, AR 72701 Email: [email protected]
Collision Prevention and Area Monitoring with the LMS Laser Measurement System
 Collision Prevention and Area Monitoring with the LMS Laser Measurement System PDF processed with CutePDF evaluation edition www.cutepdf.com A v o i d...... collisions SICK Laser Measurement Systems are
Collision Prevention and Area Monitoring with the LMS Laser Measurement System PDF processed with CutePDF evaluation edition www.cutepdf.com A v o i d...... collisions SICK Laser Measurement Systems are
CELL PHONE TRACKING. Index. Purpose. Description. Relevance for Large Scale Events. Options. Technologies. Impacts. Integration potential
 CELL PHONE TRACKING Index Purpose Description Relevance for Large Scale Events Options Technologies Impacts Integration potential Implementation Best Cases and Examples 1 of 10 Purpose Cell phone tracking
CELL PHONE TRACKING Index Purpose Description Relevance for Large Scale Events Options Technologies Impacts Integration potential Implementation Best Cases and Examples 1 of 10 Purpose Cell phone tracking
FLEXSYS Motion-based Traffic Analysis and Incident Detection
 FLEXSYS Motion-based Traffic Analysis and Incident Detection Authors: Lixin Yang and Hichem Sahli, IBBT/VUB-ETRO Contents.1 Introduction......................................... 1.2 Traffic flow modelling
FLEXSYS Motion-based Traffic Analysis and Incident Detection Authors: Lixin Yang and Hichem Sahli, IBBT/VUB-ETRO Contents.1 Introduction......................................... 1.2 Traffic flow modelling
Vision based Vehicle Tracking using a high angle camera
 Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu [email protected] [email protected] Abstract A vehicle tracking and grouping algorithm is presented in this work
Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu [email protected] [email protected] Abstract A vehicle tracking and grouping algorithm is presented in this work
Real-Time Tracking of Pedestrians and Vehicles
 Real-Time Tracking of Pedestrians and Vehicles N.T. Siebel and S.J. Maybank. Computational Vision Group Department of Computer Science The University of Reading Reading RG6 6AY, England Abstract We present
Real-Time Tracking of Pedestrians and Vehicles N.T. Siebel and S.J. Maybank. Computational Vision Group Department of Computer Science The University of Reading Reading RG6 6AY, England Abstract We present
Scalable Traffic Video Analytics using Hadoop MapReduce
 Scalable Traffic Video Analytics using Hadoop MapReduce Vaithilingam Anantha Natarajan Subbaiyan Jothilakshmi Venkat N Gudivada Department of Computer Science and Engineering Annamalai University Tamilnadu,
Scalable Traffic Video Analytics using Hadoop MapReduce Vaithilingam Anantha Natarajan Subbaiyan Jothilakshmi Venkat N Gudivada Department of Computer Science and Engineering Annamalai University Tamilnadu,
USING MOBILE LIDAR TO SURVEY A RAILWAY LINE FOR ASSET INVENTORY INTRODUCTION
 USING MOBILE LIDAR TO SURVEY A RAILWAY LINE FOR ASSET INVENTORY a Michael Leslar, Sales and Marketing Support Engineer b Gordon Perry, Senior Project Manager b Keith McNease, Principal a Optech Incorporated
USING MOBILE LIDAR TO SURVEY A RAILWAY LINE FOR ASSET INVENTORY a Michael Leslar, Sales and Marketing Support Engineer b Gordon Perry, Senior Project Manager b Keith McNease, Principal a Optech Incorporated
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER
 ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
Road Conditioning monitoring using smart phones
 Road Conditioning monitoring using smart phones Collect IRI by using the built in accelerometer in a modern smartphone. The Android app registers the vibrations from the road and correlates to the International
Road Conditioning monitoring using smart phones Collect IRI by using the built in accelerometer in a modern smartphone. The Android app registers the vibrations from the road and correlates to the International
Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty
 Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty GOOGLE CAR uiopasdfghjklzxcvbnmqwertyuiopasdf Gonzalo Ghigliazza
Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty GOOGLE CAR uiopasdfghjklzxcvbnmqwertyuiopasdf Gonzalo Ghigliazza
5. Satellite Systems. History of Satellite Communications
 5. Satellite Systems History and Orbits Routing, Localization, and Hand-over Systems 2005 Burkhard Stiller and Jochen Schiller FU Berlin M5 1 History of Satellite Communications 1945 Arthur C. Clarke about
5. Satellite Systems History and Orbits Routing, Localization, and Hand-over Systems 2005 Burkhard Stiller and Jochen Schiller FU Berlin M5 1 History of Satellite Communications 1945 Arthur C. Clarke about
TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS
 TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS BY MARTIN WAGENER APPLICATIONS ENGINEER, TRIMBLE EUROPE OVERVIEW Today s construction industry demands more
TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS BY MARTIN WAGENER APPLICATIONS ENGINEER, TRIMBLE EUROPE OVERVIEW Today s construction industry demands more
Motion & The Global Positioning System (GPS)
") Grade Level: K - 8 Subject: Motion Prep Time: < 10 minutes Duration: 30 minutes Objective: To learn how to analyze GPS data in order to track an object and derive its velocity from positions and times.
Grade Level: K - 8 Subject: Motion Prep Time: < 10 minutes Duration: 30 minutes Objective: To learn how to analyze GPS data in order to track an object and derive its velocity from positions and times.
The TomTom Manifesto Reducing Congestion for All Big traffic data for smart mobility, traffic planning and traffic management
 The TomTom Manifesto Reducing Congestion for All Big traffic data for smart mobility, traffic planning and traffic management Ralf-Peter Schäfer Fellow & VP Traffic and Travel Information Product Unit
The TomTom Manifesto Reducing Congestion for All Big traffic data for smart mobility, traffic planning and traffic management Ralf-Peter Schäfer Fellow & VP Traffic and Travel Information Product Unit
Ensuring Security by Providing Technology Multipliers
 Ensuring Security by Providing Technology Multipliers formerly KritiKal SecureScan UNDER VEHICLE SCANNING SYSTEM X-RAY BAGGAGE SCANNERS AUTOMATIC NUMBER PLATE RECOGNITION SPEED VIOLATION DETECTION RED
Ensuring Security by Providing Technology Multipliers formerly KritiKal SecureScan UNDER VEHICLE SCANNING SYSTEM X-RAY BAGGAGE SCANNERS AUTOMATIC NUMBER PLATE RECOGNITION SPEED VIOLATION DETECTION RED
VEHICLE LOCALISATION AND CLASSIFICATION IN URBAN CCTV STREAMS
 VEHICLE LOCALISATION AND CLASSIFICATION IN URBAN CCTV STREAMS Norbert Buch 1, Mark Cracknell 2, James Orwell 1 and Sergio A. Velastin 1 1. Kingston University, Penrhyn Road, Kingston upon Thames, KT1 2EE,
VEHICLE LOCALISATION AND CLASSIFICATION IN URBAN CCTV STREAMS Norbert Buch 1, Mark Cracknell 2, James Orwell 1 and Sergio A. Velastin 1 1. Kingston University, Penrhyn Road, Kingston upon Thames, KT1 2EE,
Development of an automated Red Light Violation Detection System (RLVDS) for Indian vehicles
 for Indian vehicles") CS11 59 Development of an automated Red Light Violation Detection System (RLVDS) for Indian vehicles Satadal Saha 1, Subhadip Basu 2 *, Mita Nasipuri 2, Dipak Kumar Basu # 2 # AICTE Emeritus Fellow 1 CSE
CS11 59 Development of an automated Red Light Violation Detection System (RLVDS) for Indian vehicles Satadal Saha 1, Subhadip Basu 2 *, Mita Nasipuri 2, Dipak Kumar Basu # 2 # AICTE Emeritus Fellow 1 CSE
Presented by: Dr. Senanu Ashiabor, Intermodal Logistics Consulting Inc. at 2015 North Carolina MPO Conference April 30, 2015
 Presented by: Dr. Senanu Ashiabor, Intermodal Logistics Consulting Inc. at 2015 North Carolina MPO Conference April 30, 2015 What is Big Data? Big data is a broad term for large datasets that are so large
Presented by: Dr. Senanu Ashiabor, Intermodal Logistics Consulting Inc. at 2015 North Carolina MPO Conference April 30, 2015 What is Big Data? Big data is a broad term for large datasets that are so large
Railway Crossing Information System
 Railway Crossing Information System ITS Canada Presentation June 2, 2014 Ian Steele, P.Eng Agenda Click to edit Master title style RBRC Program Project Background Concept of Operations Design Process Design
Railway Crossing Information System ITS Canada Presentation June 2, 2014 Ian Steele, P.Eng Agenda Click to edit Master title style RBRC Program Project Background Concept of Operations Design Process Design
CBERS Program Update Jacie 2011. Frederico dos Santos Liporace AMS Kepler [email protected]
 CBERS Program Update Jacie 2011 Frederico dos Santos Liporace AMS Kepler [email protected] Overview CBERS 3 and 4 characteristics Differences from previous CBERS satellites (CBERS 1/2/2B) Geometric
CBERS Program Update Jacie 2011 Frederico dos Santos Liporace AMS Kepler [email protected] Overview CBERS 3 and 4 characteristics Differences from previous CBERS satellites (CBERS 1/2/2B) Geometric
Survey Sensors Hydrofest 2014. Ross Leitch Project Surveyor
 Survey Sensors Hydrofest 2014 Ross Leitch Project Surveyor Satellite Positioning Only provides position of antenna Acoustic Positioning Only provides position of transponder relative to transceiver How
Survey Sensors Hydrofest 2014 Ross Leitch Project Surveyor Satellite Positioning Only provides position of antenna Acoustic Positioning Only provides position of transponder relative to transceiver How
IP-S2 HD. High Definition 3D Mobile Mapping System
 IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution High Density, Long Range LiDAR sensor for ultimate in visual detail High Accuracy IMU and DMI Odometry for positional accuracy
IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution High Density, Long Range LiDAR sensor for ultimate in visual detail High Accuracy IMU and DMI Odometry for positional accuracy
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite
 Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Defog Image Processing
 Introduction Expectations for a camera s performance, no matter the application, are that it must work and provide clear usable images, regardless of any environmental or mechanical challenges the camera
Introduction Expectations for a camera s performance, no matter the application, are that it must work and provide clear usable images, regardless of any environmental or mechanical challenges the camera
A FRAMEWORK FOR DYNAMIC TRAFFIC MONITORING USING VEHICULAR AD-HOC NETWORKS DOCTOR OF PHILOSOPHY COMPUTER SCIENCE. OLD DOMINION UNIVERSITY August 2011
 A FRAMEWORK FOR DYNAMIC TRAFFIC MONITORING USING VEHICULAR AD-HOC NETWORKS by Mohammad Hadi Arbabi B.S. June 2001, Shiraz University M.S. June 2007, Old Dominion University A Dissertation Submitted to
A FRAMEWORK FOR DYNAMIC TRAFFIC MONITORING USING VEHICULAR AD-HOC NETWORKS by Mohammad Hadi Arbabi B.S. June 2001, Shiraz University M.S. June 2007, Old Dominion University A Dissertation Submitted to
3D Vehicle Extraction and Tracking from Multiple Viewpoints for Traffic Monitoring by using Probability Fusion Map
 Electronic Letters on Computer Vision and Image Analysis 7(2):110-119, 2008 3D Vehicle Extraction and Tracking from Multiple Viewpoints for Traffic Monitoring by using Probability Fusion Map Zhencheng
Electronic Letters on Computer Vision and Image Analysis 7(2):110-119, 2008 3D Vehicle Extraction and Tracking from Multiple Viewpoints for Traffic Monitoring by using Probability Fusion Map Zhencheng
RIVA Megapixel cameras with integrated 3D Video Analytics - The next generation
 RIVA Megapixel cameras with integrated 3D Video Analytics - The next generation Creating intelligent solutions with Video Analytics (VCA- Video Content Analysis) Intelligent IP video surveillance is one
RIVA Megapixel cameras with integrated 3D Video Analytics - The next generation Creating intelligent solutions with Video Analytics (VCA- Video Content Analysis) Intelligent IP video surveillance is one
WMATA S Automated Track Analysis Technology & Data Leveraging for Maintenance Decisions
 WMATA S Automated Track Analysis Technology & Data Leveraging for Maintenance Decisions 1 WMATA System 6 Lines: 5 radial and 1 spur 234 mainline track miles and 91 stations Crew of 54 Track Inspectors
WMATA S Automated Track Analysis Technology & Data Leveraging for Maintenance Decisions 1 WMATA System 6 Lines: 5 radial and 1 spur 234 mainline track miles and 91 stations Crew of 54 Track Inspectors
ASSESSMENT OF VISUALIZATION SOFTWARE FOR SUPPORT OF CONSTRUCTION SITE INSPECTION TASKS USING DATA COLLECTED FROM REALITY CAPTURE TECHNOLOGIES
 ASSESSMENT OF VISUALIZATION SOFTWARE FOR SUPPORT OF CONSTRUCTION SITE INSPECTION TASKS USING DATA COLLECTED FROM REALITY CAPTURE TECHNOLOGIES ABSTRACT Chris Gordon 1, Burcu Akinci 2, Frank Boukamp 3, and
ASSESSMENT OF VISUALIZATION SOFTWARE FOR SUPPORT OF CONSTRUCTION SITE INSPECTION TASKS USING DATA COLLECTED FROM REALITY CAPTURE TECHNOLOGIES ABSTRACT Chris Gordon 1, Burcu Akinci 2, Frank Boukamp 3, and
ACCIDENTS AND NEAR-MISSES ANALYSIS BY USING VIDEO DRIVE-RECORDERS IN A FLEET TEST
 ACCIDENTS AND NEAR-MISSES ANALYSIS BY USING VIDEO DRIVE-RECORDERS IN A FLEET TEST Yuji Arai Tetsuya Nishimoto apan Automobile Research Institute apan Yukihiro Ezaka Ministry of Land, Infrastructure and
ACCIDENTS AND NEAR-MISSES ANALYSIS BY USING VIDEO DRIVE-RECORDERS IN A FLEET TEST Yuji Arai Tetsuya Nishimoto apan Automobile Research Institute apan Yukihiro Ezaka Ministry of Land, Infrastructure and
Physics Kinematics Model
 Physics Kinematics Model I. Overview Active Physics introduces the concept of average velocity and average acceleration. This unit supplements Active Physics by addressing the concept of instantaneous
Physics Kinematics Model I. Overview Active Physics introduces the concept of average velocity and average acceleration. This unit supplements Active Physics by addressing the concept of instantaneous
Vehicle and Object Tracking Based on GPS and GSM
 Vehicle and Object Tracking Based on GPS and GSM 1 Sonali Kumari, 2 Simran Ghai, 3 Bharti Kushwaha 1,2,3 Department of Computer Science, Dronacharya Group of Institutions, Greater Noida (U.P), India Abstract:
Vehicle and Object Tracking Based on GPS and GSM 1 Sonali Kumari, 2 Simran Ghai, 3 Bharti Kushwaha 1,2,3 Department of Computer Science, Dronacharya Group of Institutions, Greater Noida (U.P), India Abstract:
MobileMapper 6 White Paper
 MobileMapper 6 White Paper Meter-Level Mapping Accuracy With Post-Processing Introduction Since its introduction in February 2008, the Magellan MobileMapper 6 has been welcomed by the market as the only
MobileMapper 6 White Paper Meter-Level Mapping Accuracy With Post-Processing Introduction Since its introduction in February 2008, the Magellan MobileMapper 6 has been welcomed by the market as the only
Traffic Management for a Smarter City:Istanbul Istanbul Metropolitan Municipality
 Traffic Management for a Smarter City:Istanbul Istanbul Metropolitan Municipality Traffic Management for a Smarter City: Istanbul There is no doubt for Traffic Management to be an issue in a crowded city
Traffic Management for a Smarter City:Istanbul Istanbul Metropolitan Municipality Traffic Management for a Smarter City: Istanbul There is no doubt for Traffic Management to be an issue in a crowded city
ARGUS GR RFHQ\ VWDQX WHFKQLF]QHJR
![ARGUS GR RFHQ\ VWDQX WHFKQLF]QHJR](/thumbs/24/2835480.jpg "ARGUS GR RFHQ\ VWDQX WHFKQLF]QHJR") ARGUS 2 - - - - - - #1 #0 #2 #3 #4 ARGUS #5 3 4 - - - - > - - - - - - Fh, Fth, Cross dim. qr, Fh, Fth Cross dim. QR, 5 Description of the modules Vehicle Identification It must be possible to assign the
ARGUS 2 - - - - - - #1 #0 #2 #3 #4 ARGUS #5 3 4 - - - - > - - - - - - Fh, Fth, Cross dim. qr, Fh, Fth Cross dim. QR, 5 Description of the modules Vehicle Identification It must be possible to assign the
SHOALS Toolbox: Software to Support Visualization and Analysis of Large, High-Density Data Sets
 SHOALS Toolbox: Software to Support Visualization and Analysis of Large, High-Density Data Sets by Jennifer M. Wozencraft, W. Jeff Lillycrop, and Nicholas C. Kraus PURPOSE: The Coastal and Hydraulics Engineering
SHOALS Toolbox: Software to Support Visualization and Analysis of Large, High-Density Data Sets by Jennifer M. Wozencraft, W. Jeff Lillycrop, and Nicholas C. Kraus PURPOSE: The Coastal and Hydraulics Engineering
CCTV - Video Analytics for Traffic Management
 CCTV - Video Analytics for Traffic Management Index Purpose Description Relevance for Large Scale Events Technologies Impacts Integration potential Implementation Best Cases and Examples 1 of 12 Purpose
CCTV - Video Analytics for Traffic Management Index Purpose Description Relevance for Large Scale Events Technologies Impacts Integration potential Implementation Best Cases and Examples 1 of 12 Purpose
ACOUSTIC SIGNALS PROCESSING AND APPLIANCE FOR THE PROBLEM OF TRAFFIC FLOW MONITORING
 Transport and Telecommunication, 21, Volume 11, No 1, 4 1 Transport and Telecommunication Institute, Lomonosova 1, Riga, LV-119, Latvia ACOUSTIC SIGNALS PROCESSING AND APPLIANCE FOR THE PROBLEM OF TRAFFIC
Transport and Telecommunication, 21, Volume 11, No 1, 4 1 Transport and Telecommunication Institute, Lomonosova 1, Riga, LV-119, Latvia ACOUSTIC SIGNALS PROCESSING AND APPLIANCE FOR THE PROBLEM OF TRAFFIC
How cloud-based systems and machine-driven big data can contribute to the development of autonomous vehicles
 How cloud-based systems and machine-driven big data can contribute to the development of autonomous vehicles David Fidalgo- Altran Senior Business Manager CONTENTS I. Altran Group/ Intelligence Systems
How cloud-based systems and machine-driven big data can contribute to the development of autonomous vehicles David Fidalgo- Altran Senior Business Manager CONTENTS I. Altran Group/ Intelligence Systems
Science Fiction to Reality: The Future of Automobile Insurance and Transportation Technology
 Michael R. Nelson Kymberly Kochis October 13, 2015 Science Fiction to Reality: The Future of Automobile Insurance and Transportation Technology INSURANCE AND FINANCIAL SERVICES LITIGATION WEBINAR SERIES
Michael R. Nelson Kymberly Kochis October 13, 2015 Science Fiction to Reality: The Future of Automobile Insurance and Transportation Technology INSURANCE AND FINANCIAL SERVICES LITIGATION WEBINAR SERIES
2/26/2008. Sensors For Robotics. What is sensing? Why do robots need sensors? What is the angle of my arm? internal information
 Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Mobile Communications: Satellite Systems
 Mobile Communications: Satellite Systems Mobile Communication: Satellite Systems - Jochen Schiller http://www.jochenschiller.de 1 History of satellite communication 1945 Arthur C. Clarke publishes an essay
Mobile Communications: Satellite Systems Mobile Communication: Satellite Systems - Jochen Schiller http://www.jochenschiller.de 1 History of satellite communication 1945 Arthur C. Clarke publishes an essay
Tips and Technology For Bosch Partners
 Tips and Technology For Bosch Partners Current information for the successful workshop No. 04/2015 Electrics / Elektronics Driver Assistance Systems In this issue, we are continuing our series on automated
Tips and Technology For Bosch Partners Current information for the successful workshop No. 04/2015 Electrics / Elektronics Driver Assistance Systems In this issue, we are continuing our series on automated
Robot Sensors. Outline. The Robot Structure. Robots and Sensors. Henrik I Christensen
 Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 [email protected] Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 [email protected] Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
BONEMA TECHNOLOGIES PRODUCT FEATURES. The following training provides information on the Bonema product features.
 BONEMA TECHNOLOGIES PRODUCT FEATURES The following training provides information on the Bonema product features. Real-time tracking Vehicle tracking relies both on the Global Positioning satellites (GPS)
BONEMA TECHNOLOGIES PRODUCT FEATURES The following training provides information on the Bonema product features. Real-time tracking Vehicle tracking relies both on the Global Positioning satellites (GPS)
Mobile Computing. Chapter 5: Satellite Systems
 Mobile Computing Chapter 5: Satellite Systems Prof. Sang-Jo Yoo History of satellite communication 1945 Arthur C. Clarke publishes an essay about Extra Terrestrial Relays 1957 First satellite SPUTNIK by
Mobile Computing Chapter 5: Satellite Systems Prof. Sang-Jo Yoo History of satellite communication 1945 Arthur C. Clarke publishes an essay about Extra Terrestrial Relays 1957 First satellite SPUTNIK by
SPEED, VELOCITY, AND ACCELERATION
 reflect Look at the picture of people running across a field. What words come to mind? Maybe you think about the word speed to describe how fast the people are running. You might think of the word acceleration
reflect Look at the picture of people running across a field. What words come to mind? Maybe you think about the word speed to describe how fast the people are running. You might think of the word acceleration
User Manual (UDTTV01 V 1.6
 User Manual (UDTTV01 GPS/GSM Vehicle Tracker) V 1.6 1.1 Brief Introduction The UDTTV01 GPS/GSM Tracker is a vehicle remote positioning device with built-in GPS and GSM/GPRS technology in compact size.
User Manual (UDTTV01 GPS/GSM Vehicle Tracker) V 1.6 1.1 Brief Introduction The UDTTV01 GPS/GSM Tracker is a vehicle remote positioning device with built-in GPS and GSM/GPRS technology in compact size.
HIGH-PERFORMANCE INSPECTION VEHICLE FOR RAILWAYS AND TUNNEL LININGS. HIGH-PERFORMANCE INSPECTION VEHICLE FOR RAILWAY AND ROAD TUNNEL LININGS.
 HIGH-PERFORMANCE INSPECTION VEHICLE FOR RAILWAYS AND TUNNEL LININGS. HIGH-PERFORMANCE INSPECTION VEHICLE FOR RAILWAY AND ROAD TUNNEL LININGS. The vehicle developed by Euroconsult and Pavemetrics and described
HIGH-PERFORMANCE INSPECTION VEHICLE FOR RAILWAYS AND TUNNEL LININGS. HIGH-PERFORMANCE INSPECTION VEHICLE FOR RAILWAY AND ROAD TUNNEL LININGS. The vehicle developed by Euroconsult and Pavemetrics and described
M3S ANPR Automatic Number Plates Recognize System
 Zakopianska 6 Str. 03-934 Warsaw tel. (22) 511 19 99 fax: (22) 511 19 95 www.polixel.pl M3S ANPR Automatic Number Plates Recognize System M3S-ANPR Automatic Number Plates Recognize system is authorial
Zakopianska 6 Str. 03-934 Warsaw tel. (22) 511 19 99 fax: (22) 511 19 95 www.polixel.pl M3S ANPR Automatic Number Plates Recognize System M3S-ANPR Automatic Number Plates Recognize system is authorial
VENETOREGION ROAD NETWORK ROAD MAPPING LASER SCANNING FACILITY MANAGEMENT
 VENETOREGION ROAD NETWORK ROAD MAPPING LASER SCANNING FACILITY MANAGEMENT ing. Augusto Burchi [email protected] Siteco profile Italian software house specialized in GIS and RDBMS dedicated to Road networks
VENETOREGION ROAD NETWORK ROAD MAPPING LASER SCANNING FACILITY MANAGEMENT ing. Augusto Burchi [email protected] Siteco profile Italian software house specialized in GIS and RDBMS dedicated to Road networks
A STUDY ON WARNING TIMING FOR LANE CHANGE DECISION AID SYSTEMS BASED ON DRIVER S LANE CHANGE MANEUVER
 A STUDY ON WARNING TIMING FOR LANE CHANGE DECISION AID SYSTEMS BASED ON DRIVER S LANE CHANGE MANEUVER Takashi Wakasugi Japan Automobile Research Institute Japan Paper Number 5-29 ABSTRACT The purpose of
A STUDY ON WARNING TIMING FOR LANE CHANGE DECISION AID SYSTEMS BASED ON DRIVER S LANE CHANGE MANEUVER Takashi Wakasugi Japan Automobile Research Institute Japan Paper Number 5-29 ABSTRACT The purpose of
Comparing data from mobile and static traffic sensors for travel time assessment
 Comparing data from mobile and static traffic sensors for travel time assessment Nicolas Saunier and Catherine Morency Department of civil, geological and mining engineering, École Polytechnique de Montréal,
Comparing data from mobile and static traffic sensors for travel time assessment Nicolas Saunier and Catherine Morency Department of civil, geological and mining engineering, École Polytechnique de Montréal,
Mobile Communications Chapter 5: Satellite Systems
 History of satellite communication Mobile Communications Chapter 5: Satellite Systems History Basics Orbits LEO, MEO, GEO Examples Handover, Routing 1945 Arthur C. Clarke publishes an essay about Extra
History of satellite communication Mobile Communications Chapter 5: Satellite Systems History Basics Orbits LEO, MEO, GEO Examples Handover, Routing 1945 Arthur C. Clarke publishes an essay about Extra
A Multipurpose Vehicle Tracking System Based on ARM CORTEX-M3 STM32, HMC5883L, MPU-6050, GSM and GPS
 Journal of Traffic and Logistics Engineering Vol. 4, No. 1, June 2016 A Multipurpose Vehicle Tracking System Based on ARM CORTEX-M3 STM32, HMC5883L, MPU-6050, GSM and GPS Muhammad Husnain Ul Abdeen, Umar
Journal of Traffic and Logistics Engineering Vol. 4, No. 1, June 2016 A Multipurpose Vehicle Tracking System Based on ARM CORTEX-M3 STM32, HMC5883L, MPU-6050, GSM and GPS Muhammad Husnain Ul Abdeen, Umar
Static Environment Recognition Using Omni-camera from a Moving Vehicle
 Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
How To Make An Orthophoto
 ISSUE 2 SEPTEMBER 2014 TSA Endorsed by: CLIENT GUIDE TO DIGITAL ORTHO- PHOTOGRAPHY The Survey Association s Client Guides are primarily aimed at other professionals such as engineers, architects, planners
ISSUE 2 SEPTEMBER 2014 TSA Endorsed by: CLIENT GUIDE TO DIGITAL ORTHO- PHOTOGRAPHY The Survey Association s Client Guides are primarily aimed at other professionals such as engineers, architects, planners
Orbital Mechanics. Angular Momentum
 Orbital Mechanics The objects that orbit earth have only a few forces acting on them, the largest being the gravitational pull from the earth. The trajectories that satellites or rockets follow are largely
Orbital Mechanics The objects that orbit earth have only a few forces acting on them, the largest being the gravitational pull from the earth. The trajectories that satellites or rockets follow are largely
Robotic motion planning for 8- DOF motion stage
 Robotic motion planning for 8- DOF motion stage 12 November Mark Geelen Simon Jansen Alten Mechatronics www.alten.nl [email protected] Introduction Introduction Alten FEI Motion planning MoveIt! Proof
Robotic motion planning for 8- DOF motion stage 12 November Mark Geelen Simon Jansen Alten Mechatronics www.alten.nl [email protected] Introduction Introduction Alten FEI Motion planning MoveIt! Proof
BACnet for Video Surveillance
 The following article was published in ASHRAE Journal, October 2004. Copyright 2004 American Society of Heating, Refrigerating and Air-Conditioning Engineers, Inc. It is presented for educational purposes
The following article was published in ASHRAE Journal, October 2004. Copyright 2004 American Society of Heating, Refrigerating and Air-Conditioning Engineers, Inc. It is presented for educational purposes
ENGINEERING METROLOGY
 ENGINEERING METROLOGY ACADEMIC YEAR 92-93, SEMESTER ONE COORDINATE MEASURING MACHINES OPTICAL MEASUREMENT SYSTEMS; DEPARTMENT OF MECHANICAL ENGINEERING ISFAHAN UNIVERSITY OF TECHNOLOGY Coordinate Measuring
ENGINEERING METROLOGY ACADEMIC YEAR 92-93, SEMESTER ONE COORDINATE MEASURING MACHINES OPTICAL MEASUREMENT SYSTEMS; DEPARTMENT OF MECHANICAL ENGINEERING ISFAHAN UNIVERSITY OF TECHNOLOGY Coordinate Measuring
Neural Network based Vehicle Classification for Intelligent Traffic Control
 Neural Network based Vehicle Classification for Intelligent Traffic Control Saeid Fazli 1, Shahram Mohammadi 2, Morteza Rahmani 3 1,2,3 Electrical Engineering Department, Zanjan University, Zanjan, IRAN
Neural Network based Vehicle Classification for Intelligent Traffic Control Saeid Fazli 1, Shahram Mohammadi 2, Morteza Rahmani 3 1,2,3 Electrical Engineering Department, Zanjan University, Zanjan, IRAN
Scalar versus Vector Quantities. Speed. Speed: Example Two. Scalar Quantities. Average Speed = distance (in meters) time (in seconds) v =
 time (in seconds) v =") Scalar versus Vector Quantities Scalar Quantities Magnitude (size) 55 mph Speed Average Speed = distance (in meters) time (in seconds) Vector Quantities Magnitude (size) Direction 55 mph, North v = Dx
Scalar versus Vector Quantities Scalar Quantities Magnitude (size) 55 mph Speed Average Speed = distance (in meters) time (in seconds) Vector Quantities Magnitude (size) Direction 55 mph, North v = Dx
3D Building Roof Extraction From LiDAR Data
 3D Building Roof Extraction From LiDAR Data Amit A. Kokje Susan Jones NSG- NZ Outline LiDAR: Basics LiDAR Feature Extraction (Features and Limitations) LiDAR Roof extraction (Workflow, parameters, results)
3D Building Roof Extraction From LiDAR Data Amit A. Kokje Susan Jones NSG- NZ Outline LiDAR: Basics LiDAR Feature Extraction (Features and Limitations) LiDAR Roof extraction (Workflow, parameters, results)
Methane to Markets Oil and Natural Gas Technology Transfer Workshop
 Methane to Markets Oil and Natural Gas Technology Transfer Workshop Airborne Differential Absorption Lidar (DIAL) Detection and Measurement of Fugitive Emissions Steven Stearns ANGEL Service ITT Space
Methane to Markets Oil and Natural Gas Technology Transfer Workshop Airborne Differential Absorption Lidar (DIAL) Detection and Measurement of Fugitive Emissions Steven Stearns ANGEL Service ITT Space
Physics: Principles and Applications, 6e Giancoli Chapter 2 Describing Motion: Kinematics in One Dimension
 Physics: Principles and Applications, 6e Giancoli Chapter 2 Describing Motion: Kinematics in One Dimension Conceptual Questions 1) Suppose that an object travels from one point in space to another. Make
Physics: Principles and Applications, 6e Giancoli Chapter 2 Describing Motion: Kinematics in One Dimension Conceptual Questions 1) Suppose that an object travels from one point in space to another. Make
Chapter 4 DEFENSIVE DRIVING
 Chapter 4 DEFENSIVE DRIVING Chapter 4 Table of Contents Chapter 4 DEFENSIVE DRIVING... 4-1 DEFENSIVE DRIVING... 4-3 Positioning The Bus... 4-3 When Making a Turn at an Intersection... 4-3 Making the perfect
Chapter 4 DEFENSIVE DRIVING Chapter 4 Table of Contents Chapter 4 DEFENSIVE DRIVING... 4-1 DEFENSIVE DRIVING... 4-3 Positioning The Bus... 4-3 When Making a Turn at an Intersection... 4-3 Making the perfect
Synthetic Sensing: Proximity / Distance Sensors
 Synthetic Sensing: Proximity / Distance Sensors MediaRobotics Lab, February 2010 Proximity detection is dependent on the object of interest. One size does not fit all For non-contact distance measurement,
Synthetic Sensing: Proximity / Distance Sensors MediaRobotics Lab, February 2010 Proximity detection is dependent on the object of interest. One size does not fit all For non-contact distance measurement,