Numerical integration of related Hankel tiansforms and continued fraction expansion
|
|
|
- Ruth Park
- 8 years ago
- Views:
Transcription
1 GEOPHYSICS, VOL. 48, NO. 12 (DECEMBER 1983); P , 1 FIG., 2 TABLES. Numerical integration of related Hankel tiansforms by quadrature and continued fraction expansion Alan D. Chave* ABSTRACT An algorithm is presented for the accurate evaluation of Hankel (or Bessel) transforms of algebraically related kernel functions, defined here as the non-bessel function portion of the integrand, that is more widely applicable than the standard digital filter methods without enormous increases in computational burden. The algorithm performs the automatic integration of the product of the kernel and Bessel functions between the asymptotic zero crossings of the latter and sums the series of partial integrations using a continued fraction expansion, equivalent to an analytic continuation of the series. The integrands may be saved to allow the rapid computation of related transforms without recalculating the kernel or Bessel functions, and the integration steps use interlacing quadrature formulas so that no function evaluations are wasted when it is necessary to increase the order of the quadrature rule. The continued fraction algorithm allows very slowly divergent or even formally divergent integrals to be computed quite easily. The local error is controlled at each step in the algorithm, and accuracy is limited largely by machine resolution. The algorithm is written in Fortran and is listed in an Appendix along with a driver program that illustrates its features. The driver program and subroutine are available from the SEG Business Offtce. INTRODUCTION Hankel transforms (sometimes called Bessel transforms) written in the standard form f(p) = Jo m dk k&j,(b) are ubiquitous in the mathematical treatment of physical problems involving cylindrical symmetry, as observed in disciplines like optics, electromagnetism, and seismology. The function J, in equation (1) is a Bessel function of the first kind of real order v which exhibits decaying, oscillatory behavior for increasing argument along the real axis, and equation (1) is formally equivalent to a double Fourier transform. The parameter k will be called the wavenumber, while p is usually the horizontal range. The pair {f(p),!(k)} is referred to as the kernel functions when it appears under the integral sign; the transforms may also be written with the multiplicative p and k terms absorbed into f (b) and/(k), respectively. For most physical Ijroblems the order of the Bessel function is an integer, and for that case only the v = 0 and 1 cases need be considered since higher order Bessel functions are related to them by standard recursion formulas. Integrals of the form (1) can be evaluated in closed form for only a restricted set of kernel functions (Watson, 1962), and recourse to numerical methods is generally required for the study of real problems. The standard numerical approach to the computation of Hankel transforms has become the digital filter method since the work of Ghosh (1971). Suitable changes of the independent variables k and p in equation (1) are applied to turn the direct integrals into convolution integrals; these,are discretized to a finite convolutional sum. The Bessel function of the new variable plays the role of a known digital filter through which the kernel functions are passed as the signal to yield the transformed result as the filter output. Design criteria for the filter are of necessity largely ad hoc and were discussed by Anderson (1979). Reasonable (5 figure) accuracy is typically achieved for monotonic, rapidly decreasing kernel functions at moderate values of p. More recent developments, including adaptive and lagged convolution to minimize kernel function evaluations, were covered by Anderson (1982). For some types of problems the digital filter method is less useful; examples occur at very small values of the range p, where the kernel function may be changing rapidly when compared to the Bessel function, and when high numerical precision is required. Direct numerical integration of equation (1) was discussed by Cornille (1972) using the half-cycles of the Bessel function as subintervals combined with Euler s transformation to sum the series of partial integrations. A similar approach is adopted here, with several major improvements, including (1) interlacing quadrature formulas are used so that none of the costly kernel or Bessel function evaluations is Manuscript received by the Editor February 25, 1983; revised manuscript received May 31, *Institute of Geophysics and Planetary Physics, Scripps Institution of Oceanography, University of California at San Diego, La Jolla, CA Society of Exploration Geophysicists. All rights reserved. 1671

2 1672 Chave wasted when it is necessary to increase the order of the rule to achieve a desired accuracy, (2) automatic integration is feasible due to the use of interlacing quadrature weights, (3) the integrands may be saved so that algebraically related kernels can be treated without reevaluation of the kernels or Bessel functions, and (4) a continued fraction method is used to sum the series of partia! integrations. The latter is a very general means for the summation of series ranging from rapidly convergent to divergent and is equivalent to the analytic continuation of the series. While the algorithm presented here is generally not as fast as the digital filter approach, it is far more efficient than other direct integration schemes and should be regarded as complementing rather than replacing the standard method. ALGORITHM DESCRlPTlON The algorithm applies numerical quadrature to the evaluation of a sequence of partial integration terms where g^(k) = kf(k) in equation (1) and z, is the nth zero of J,(x) normalized by the range p. Asymptotic forms for the large zeros of Bessel functions were given in Watson (1962) or standard references; these are quite adequate even for the smallest zeros in this work. The approximation of the linear functional (2) by a finite sum j=l where aj is the abscissa and hj is the weight, is covered in standard texts on numerical analysis (Ralston and Rabinowitz, 1978). Gauss formulas possess the property of minimizing the number of abscissa points (and hence integrand evaluations) required to achieve a specified accuracy when compared to other approaches. Most Gauss rules require recomputation of all of the integrands whetl the order is changed, so that the proper order must be predetermined for good efficiency. Patterson (1968) developed methods for the optimal addition of points to a quadrature formula so that only the new integrand values need to be calculated when the order is increased, making adaptive integration to a specified error computationally feasible. The weights hj and aj in equation (3) used in the algorithm of this paper consist of a three-point Gauss rule with extension to 7, 15, 31, 63, 127, and 255 common-point, interlacing forms; these correspond to integrating polynomials of degree 5, 11,23,47,95, 191, and 383, respectively. In practice, each of the partial integrations (2) is computed by adding new weights to the quadrature rule until a combined relativeabsolute error criterion is satisfied. At each step, the kernel and Bessel function values are retained so that none of these costly evaluations need be repeated; these can optionally be placed in common storage so that algebraically related kernels can be treated without recomputing the integrands, in a manner similar to that used by Anderson (1979) with the digital filter method. The complete integral is formally obtained by summing the partial integrations; direct summation is feasible only for rapidly convergent integrals. The terms in the series are often alternating in sign due to the Bessel function s oscillatory behavior, and the result may be very slowly convergent and will diverge if the kernel increases faster than k!*. Convergence (2) acceleration using various nonlinear transformations of the series were reviewed by Bender and Orszag (1978). The most general of these is the Pad6 approximant technique, which replaces a slowly converging or diverging series by a rapidly converging expression, each term of which is equivalent to the ratio of two finite sums. Pad& summation should be regarded as a method for the analytic continuation of the series; diverging series suggest the presence of singularities which are removed by the transformation. General Padt algorithms require O(N3) operations, where N is the number of terms in the sum, but the closely related continued fraction approach yields similar results with only O(N*) operations. Sequential terms of the latter are formally equivalent to a stair-step path in the Padt table (Baker, 1975). The series of partial integrations S- ;pi may be recast into the continued fraction s= It- i-0 d, d, 1 +d, where there is a direct correspondence between the continued fraction coefficients d, and the summands pi. As terms are added to equation (4), only the last coefficient in equation (5) is computed; recursive algorithms were given by Baker (1975) and HBnggi et al (1978, 1980). The latter is used in the algorithm of this paper. In practice, the continued fraction (5) is reevaluated as additional partial integrations are added to the series (4) and the process terminates when a combined relative-absolute error criterion is satisfied. It is not necessary to compute a portion of the series explicitly and use the continued fraction method only in the asymptotic region of the kernel since the Pad6 approximants are an analytic continuation method rather than a simple convergence acceleration method. In the author s experience, the continued fraction converges quite rapidly, and more than 30 or so terms are almost never required. The continued fraction algorithm is only slightly effective for rapidly convergent integrals, but for slowly convergent or divergent ones the summation behavior is quite dramatic. ALGORITHM USAGE The algorithm contained in Appendix A is written in the ANSI X (Fortran 77) version of Fortran. For generality, the kernel function is assumed to be complex valued, but complex arithmetic is not used internally, so that double precision calculations may be used when necessary. For best results, the computations should be done with at least 60 significant bits; this requires double precision on the common 32-bit machines (e.g., VAX, Prime). To use the routines on larger machines (e.g., CDC, CRAY-l), only the implicit double precision statements in the subroutines and the type declaration for the functions need be changed. The usual entry point to the algorithm yields the automatic integration of the Hankel transform to a specified accuracy by increasing the order of the quadrature rule until a convergence criterion is satisfied. The call has the form (4) (5)

3 inkgratlfon oi- Hankei~ Transiurm?673- CALL BESAUT (BESR, BE%, ORDER, NL, NU, R, FUNCT, RERR, AERR, NPCS, NEW, IERR) where the variable types follow the usual Fortran conventions. The input arguments are ORDER = order of the Bessel function. NL, NU = lower and upper limit for the quadrature order, where NL, NU = 1, 7 selects 3, 7, 15, 31, 63, 127, and 255 point rules. These parameters are provided to allow user control of the cost of the integration. For fully automatic integration, set NL = 1 and NU = 7. R = argument of the Bessel function where R 2 0. This corresponds to the range p in (1). FUNCT = subroutine to return the kernel function. FUNCT must be declared EXTERNAL in the calling program. The access is of the form CALL FUNCT (X, YR, YI) where X is the wavenumber [k in equation (l)] supplied by BESAUT and YR and YI are the returned real and imaginary parts of the kernel function. Any additional parameters should be passed to FUNCT in a common block. RERR, AERR = relative and absolute error parameters used for termination. The algorithm controls the!ocalerlm_ defined as the difference between the result of two sequential quadrature orders, so that for termination ABS (local error) 5 RERR* ABS (RESULT) + AERR where RESULT is the answer at the higher quadrature order. The criterion must be satisfied separately by the real and imaginary parts. Setting AERR = 0 results in a pure relative error test which may fail if the answer is very small. For a mixed error test, the criterion corresponds roughly to a relative error test when the solution is much larger than AERR and to an absolute error test when the solution is smaller than AERR. Note that both RERR and AERR must be nonnegative. NPCS = number of pieces into which the partial integration is divided at each step. This parameter is usually set to 1. For very small values of R, when the kernel changes much more rapidly than the Bessel functions, it may be necessary to subdivide each interval by increasing NPCS from 1. This should be done with caution, as it could result in excessive usage of computer time Note that NPCS 2 1. NEW = parameter to indicate the storage mode for the integral evaluations. NEW = 1 indicates the first call to BESAUT with a particular kernel function so that the product of the kernel and Bessel functions is calculated and saved for each abscissa value and partial integration. NEW = 2 indicates that a previously saved result is to be used, and only additional abscissa values and partial integrations are computed explicitly. This allows algebraically related kernels to be treated without reinitializing. The storage arrangement is described below. The output arguments are BESR, BESI = real and imaginary parts of the Hankel transform. IERR = error flag, where IERR = 0 indicates a normal return and IERR = 1 indicates a failure to converge at the highest quadrature order. The solution ob- tained at the highest order is contained in BESR and BESI when IERR = 1. An additional entry point, BESTRN, is described in the code contained in Appendix A. This subroutine returns the Hankel transform at a fixed Gauss order and has the additional capability of explicit calculation of the transform over an initial interval, allowing the user to defeat the continued fraction convergence method when desired. The saved kernel abscissas and values are stored in COM- MON/BESINT/with the form DIMENSION NW(NTERM), KARG(255, NTERM), KERN(510, NTERM) COMMON/BESINT/NK, NP, NPS, KARG, KERN where NTERM is a parameter set in the code to keep storage requirements reasonable; it may be altered at compile time The arrays KARG and KERN must be declared REAL or DOUBLE PRECISION. The abscissa values are stored in KARG (I, J), I = 1, 2** (NK (J) + 1) - 1, J = 1,... NPS and the corresponding real and imaginary parts of the integrands are stored in KERN (I, J), KERN (I + 1, J), I = 1,.2* (2** (NK (J) + 2) - l), J = 1, NPS, where the index I refers tu then abscissa points for them quadrature rule afranged in the order used and J refers to the number of the partial integrands as in equation (2). The code automatically stops saving the result when storage is full, avoiding memory access problems. The treatment of related kernels is illustrated in the driver program of Appendix B. A second common block, COMMON/TEST/, may be used to access run statistics. There are three integer parameters in the block, containing the highest quadrature order used, the total number of calls to the kernel function routine, and the number of partial integrations required to achieve convergence. In addition to the two subroutines listed above, there are six other functions or subroutines in the algorithm. These include three subroutines not normally accessed directly by the user BESQUD computes the integral (2) over a specified interval at a specified quadrature order, PADECF sums a complex series using the continued fraction algorithm of HPnggi et al (1978), CF computes a continued fraction starting at the bottom in a numerically stable fashion, and three functions that may be user supplied JBESS (X, ORDER) returns the Bessel function of the first kind of order ORDER at argument X. This should be interfaced to standard library routines, e.g. IMSL or SLATEC. Note that JBESS is a REAL or DOUBLE PRECISION function, ZEROJ (N, ORDER) returns the Nth zero of the Bessel function of the first kind of order ORDER. The ORDER = 0 and 1 case, computed using an asymptotic expansion, is contained in the routines in Appendix A, DOT (N, Xl, INCL, X2, INC2) returns the dot product of two vectors with variable incrementing allowed. The BLAS routine SDOT (Lawson et al, 1979) should be used on machines where single precision arithmetic of sufficient accuracy is available. A plug-in double precision replacement is contained in Appendix A.
. FUNCT = subroutine to return the kernel function. FUNCT must be declared EXTERNAL in the calling program.")
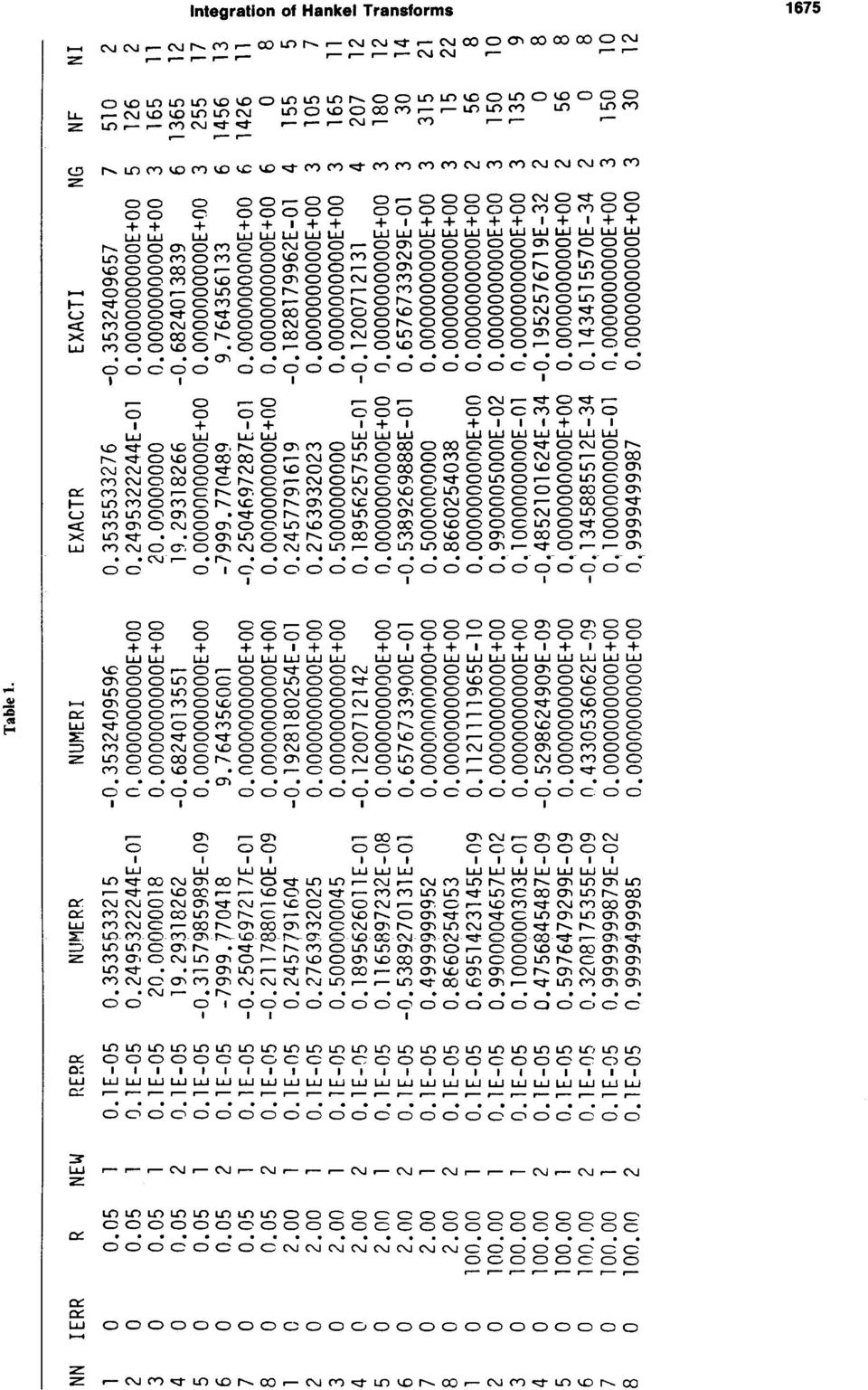
4 1674 Chave EXAMPLES AND APPLICATIONS A sequence of eight Hankel transforms of elementary functions was selected to demonstrate the features and capabilities of the algorithm; a driver program incorporating them is contained in Appendix B. The integrals are separated into four types, starting with the rapidly convergent forms s m e - p*/4n dk kcd2j,(kp) = 2a 0 (6) cc dk CkJ,(kp) = r$. s 0 2 (7) and including the slowly convergent integrals s wdk J,(kp) = ; 0 s =dk o d&jo(b) = 7. (8) (9) all of the cases, with the two rapidly convergent integrals requiring the fewest number of partial integrations and the oscillatory kernel cases needing the most. In general, a higher order quadrature rule is required for small values of the range R; this is accomplished automatically by the code. Note that the divergent integrals are easily handled, requiring a comparable amount of computer time to the slowly convergent or oscillatory integrals. Integrals (6) and (7) were included in the test program for ZHANKS in Anderson (1979), and typically required 150 kernel function evaluations for similar accuracy to the results in Table 1. At moderate values of the parameter R, the direct method requires only slightly more computer time Table 2 shows similar computations with RERR = lo-, a far more stringent requirement with a concomitant increase in computational overhead. Convergence was achieved for all cases save the rapidly divergent form (11) at the shortest range. This is caused by a lack of sufficient numerical precision in the The algebraically divergent types a: dk kj,(kp) = 0 s m dk kj_ Jo (kp) = y (ap + 1) 0 and the oscillatory kernel forms s m J&7-1 P&-T dk cos kj,(kp) = P s 30 0 (P 2 1) 0 cos k dk - k J,(b) = 45 (p > l), P (10) (11) (12) (13) z r Y e ;,I.. L _ /,,,,,, Number of Terms (P < 1) (P 5 1) where a = (1 + n/j?. Only the first pair of integrals (6)-(7) can be handled by the digital filter method, and the divergent pair (lo)-(1 1) can only be numerically integrated using an analytic continuation algorithm such as the continued fraction expansion. The last three pairs of integrals are algebraically related, and the appropriate program feature is used in the driver of Appendix B. Results for the eight test integrals at short, moderate, and long range for two values of the relative error parameter are shown in Tables 1 and 2. The columns show the integral number corresponding~to integrais <f+ji3j, thcerrorl?agi~er~r~ returned by BESAUT, the Bessel function argument R, the NEW parameters passed to BESAUT, the relative error RERR, the real and imaginary parts of the numerical result, the real and imaginary parts of the analytic result, the number of the quadrature rule used at the last iteration, the total number of calls to FUNCT, and the number of partial integrations used in the continued fraction algorithm at the last iteration. The absolute error AERR is always taken to be 1000 times smaller than the relative error. Table 1 contains the results for RERR = 10m5, which are comparable in accuracy to ZHANKS, where that algorithm is applicable (Anderson, 1979). Convergence is easily achieved for i y q Number of Terms FIG. 1. The top plot shows the convergence behavior of the continued fraction algorithm (solid) and direct summation of the partial integrations (dashed) for the rapidly convergent integral (7) using a relative error requirement of lo-. The continued fraction expansion results in more rapid convergence by a factor of over 50 percent. The bottom plot shows similar results for the slowly convergent integral (14). The continued fraction expansion has converged after 18 terms in the series of partial integrations, while the direct sum has not converged after 100 terms.
 (9) all of the cases, with the two rapidly convergent integrals requiring the fewest number of partial integrations and the oscillatory kernel cases needing the most.")
5
6

7 Integration of Hankel Transforms 1677 continued fraction algorithm as larger and larger terms are added to the series, and better behavior would be obtained if this portion of the algorithm (subroutines PADECF and CF) used a longer word length (e.g., REAL * 16 on the VAX or DOUBLE PRECISION on a mainframe computer). Figure I illustrates the power of the continued fraction expansion. The top plot shows the integral (7) with R = 2 and RERR = 10-r, AERR = lo- t5, The solid line shows the con- tinued fraction result, which converged after 11 terms, and the dashed line shows the direct sum of the partial integrands, which required 18 terms for identical convergence. The bottom part of the figure shows the slowly convergent integral nk J,(kp) = f. (14) 0 where the continued fraction result converges after 18 terms, but the direct sum is alternating and approaches the correct result very slowly. It is likely that numerical round-off will prevent the latter from ever reaching convergence. The application of this algorithm to a geophysical problem was discussed in Chave and Cox (1982) for a seafloor-based horizontal electric dipole (HED). The two fundamental electromagnetic modes for this type of source are nearly out of phase, necessitating high accuracy in the calculation of the electromagnetic fields. Correction for the finite length of real sources requires integration with a combination of Hankel transforms as integrands, another application with fairly stringent precision requirements. The direct integration algorithm of this paper has worked well in this application, and yields good user control of the computer time and numerical accuracy. ACKNOWLEDGMENTS This work was supported by the office of Naval Research and by the National Science Foundation under grant OCE REFERENCES Anderson, W. L., 1979, Numerical integration of related Hankel transforms of orders 0 and 1 bv adaptive digital filtering: Geophysics, v. 44. p ~ 1982, Fast Hankel transforms using related and lagged convolutions: ACM Trans. on Math. Software, v. 8, p Baker, G. A., Jr., 1975, Essentials of Pade approximants: New York, Academic Press. Bender. C. M.. and Orszag, 1978, Advanced mathematical methods for scientists and engineers: New York, McGraw-Hill. Chave. A. D., and Cox. C. S., 1982, Controlled electromagnetic sources for measuring electrical conductivity beneath the oceans, 1. forward problem and model study: J. Geophys. Res., v. 87, p Cornille, P., 1972, Computation of Hankel transforms: SIAM Rev.. v. 14, p Ghosh, P. P., 1971, The applicatton of linear filter theory to the direct interpretation of geoelectrical resistivity sounding measurements: Geophys. Prosp.. v. 19,~ Hanrei. P., Roesel, F., and Trautmann, P., 1978, Continued fraction expansions in scattering theory and statistical non-equilibrium mechanics: 2. Naturforsch., v. 33a, p ~ 1980, Evaluation of infinite series by use of continued fraction expansions: a numerical study: J. Comp. Phys., v. 37, p Lawson, C. L., Hanson, E. J., Kincaid, D. R., and Krogh, F. T., 1979, Basic linear algebra subprograms for Fortran usage: ACM Trans. on Math. Software. v. 6, p, Patterson, T. N. L., 1968, The optimum addition of points to quadrature formulae: Math. Comp., v. 22, p Ralston, A., and Rabinowitz, P., 1978, A first course in numerical analysis 2nd ed.: New York. McGraw-Hill. Watson, G. N., 1962, A treatise on the theory of Bessel functions, 2nd ed.: Cambridge, Cambridge Univ. Press.
 = f.")
8

9 Integration 01 Henkel Transforms 1679

10 Chave sss&%sss%s s*sss.-4s.-is4 sssn%ss%0s +++++,+,+,

11
12 Chave

13 KARC(LA+l.NP)=Surr 2+1 LA=LA+2 BESSFL FUNCTIONS SUBROUTINE PADECF(SUMR,SUmI.SR.SL.N) : CCMPUTES SUM S I N BY COMPUTAT c USING contlnl&& &;bi'i~pansioh. FUN 1 ~~~L~~~s~P ~~~:~~~~~~~~~~~~~~~~~~~~~~~I~I~~~~D~~T c st8ge & C,@,LClJLATI h WHEN THE i%?%% icc C AfGOR$Hm FRfm HAN8GI Ee AL. Z.NiTURFOR C IN THE R NCT TION, VECT RS CfCOR CFCOI A C DI ARE UPPER CASE D, Yl TORS XR,fI ARE X 30 CCNTINUE ENDIF 4U CONTINUE RODUCT OF WEIGHTS WITH INTECRAND VALUES SCILIB ON CRAY-1 IF D.P. IS WEIGHTS WITH c

14 N 2 4 a 0

15 Integration 01 Hankel Transforms

16 Chave N I N 0 * A NN I

Operation Count; Numerical Linear Algebra
 10 Operation Count; Numerical Linear Algebra 10.1 Introduction Many computations are limited simply by the sheer number of required additions, multiplications, or function evaluations. If floating-point
10 Operation Count; Numerical Linear Algebra 10.1 Introduction Many computations are limited simply by the sheer number of required additions, multiplications, or function evaluations. If floating-point
To discuss this topic fully, let us define some terms used in this and the following sets of supplemental notes.
 INFINITE SERIES SERIES AND PARTIAL SUMS What if we wanted to sum up the terms of this sequence, how many terms would I have to use? 1, 2, 3,... 10,...? Well, we could start creating sums of a finite number
INFINITE SERIES SERIES AND PARTIAL SUMS What if we wanted to sum up the terms of this sequence, how many terms would I have to use? 1, 2, 3,... 10,...? Well, we could start creating sums of a finite number
Why? A central concept in Computer Science. Algorithms are ubiquitous.
 Analysis of Algorithms: A Brief Introduction Why? A central concept in Computer Science. Algorithms are ubiquitous. Using the Internet (sending email, transferring files, use of search engines, online
Analysis of Algorithms: A Brief Introduction Why? A central concept in Computer Science. Algorithms are ubiquitous. Using the Internet (sending email, transferring files, use of search engines, online
THE NAS KERNEL BENCHMARK PROGRAM
 THE NAS KERNEL BENCHMARK PROGRAM David H. Bailey and John T. Barton Numerical Aerodynamic Simulations Systems Division NASA Ames Research Center June 13, 1986 SUMMARY A benchmark test program that measures
THE NAS KERNEL BENCHMARK PROGRAM David H. Bailey and John T. Barton Numerical Aerodynamic Simulations Systems Division NASA Ames Research Center June 13, 1986 SUMMARY A benchmark test program that measures
Integration. Topic: Trapezoidal Rule. Major: General Engineering. Author: Autar Kaw, Charlie Barker. http://numericalmethods.eng.usf.
 Integration Topic: Trapezoidal Rule Major: General Engineering Author: Autar Kaw, Charlie Barker 1 What is Integration Integration: The process of measuring the area under a function plotted on a graph.
Integration Topic: Trapezoidal Rule Major: General Engineering Author: Autar Kaw, Charlie Barker 1 What is Integration Integration: The process of measuring the area under a function plotted on a graph.
Numerical Analysis An Introduction
 Walter Gautschi Numerical Analysis An Introduction 1997 Birkhauser Boston Basel Berlin CONTENTS PREFACE xi CHAPTER 0. PROLOGUE 1 0.1. Overview 1 0.2. Numerical analysis software 3 0.3. Textbooks and monographs
Walter Gautschi Numerical Analysis An Introduction 1997 Birkhauser Boston Basel Berlin CONTENTS PREFACE xi CHAPTER 0. PROLOGUE 1 0.1. Overview 1 0.2. Numerical analysis software 3 0.3. Textbooks and monographs
Contrôle dynamique de méthodes d approximation
 Contrôle dynamique de méthodes d approximation Fabienne Jézéquel Laboratoire d Informatique de Paris 6 ARINEWS, ENS Lyon, 7-8 mars 2005 F. Jézéquel Dynamical control of approximation methods 7-8 Mar. 2005
Contrôle dynamique de méthodes d approximation Fabienne Jézéquel Laboratoire d Informatique de Paris 6 ARINEWS, ENS Lyon, 7-8 mars 2005 F. Jézéquel Dynamical control of approximation methods 7-8 Mar. 2005
Root Computations of Real-coefficient Polynomials using Spreadsheets*
 Int. J. Engng Ed. Vol. 18, No. 1, pp. 89±97, 2002 0949-149X/91 $3.00+0.00 Printed in Great Britain. # 2002 TEMPUS Publications. Root Computations of Real-coefficient Polynomials using Spreadsheets* KARIM
Int. J. Engng Ed. Vol. 18, No. 1, pp. 89±97, 2002 0949-149X/91 $3.00+0.00 Printed in Great Britain. # 2002 TEMPUS Publications. Root Computations of Real-coefficient Polynomials using Spreadsheets* KARIM
IN current film media, the increase in areal density has
 IEEE TRANSACTIONS ON MAGNETICS, VOL. 44, NO. 1, JANUARY 2008 193 A New Read Channel Model for Patterned Media Storage Seyhan Karakulak, Paul H. Siegel, Fellow, IEEE, Jack K. Wolf, Life Fellow, IEEE, and
IEEE TRANSACTIONS ON MAGNETICS, VOL. 44, NO. 1, JANUARY 2008 193 A New Read Channel Model for Patterned Media Storage Seyhan Karakulak, Paul H. Siegel, Fellow, IEEE, Jack K. Wolf, Life Fellow, IEEE, and
The Heat Equation. Lectures INF2320 p. 1/88
 The Heat Equation Lectures INF232 p. 1/88 Lectures INF232 p. 2/88 The Heat Equation We study the heat equation: u t = u xx for x (,1), t >, (1) u(,t) = u(1,t) = for t >, (2) u(x,) = f(x) for x (,1), (3)
The Heat Equation Lectures INF232 p. 1/88 Lectures INF232 p. 2/88 The Heat Equation We study the heat equation: u t = u xx for x (,1), t >, (1) u(,t) = u(1,t) = for t >, (2) u(x,) = f(x) for x (,1), (3)
Continued Fractions and the Euclidean Algorithm
 Continued Fractions and the Euclidean Algorithm Lecture notes prepared for MATH 326, Spring 997 Department of Mathematics and Statistics University at Albany William F Hammond Table of Contents Introduction
Continued Fractions and the Euclidean Algorithm Lecture notes prepared for MATH 326, Spring 997 Department of Mathematics and Statistics University at Albany William F Hammond Table of Contents Introduction
9.2 Summation Notation
 9. Summation Notation 66 9. Summation Notation In the previous section, we introduced sequences and now we shall present notation and theorems concerning the sum of terms of a sequence. We begin with a
9. Summation Notation 66 9. Summation Notation In the previous section, we introduced sequences and now we shall present notation and theorems concerning the sum of terms of a sequence. We begin with a
(Refer Slide Time: 01:11-01:27)
") Digital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 6 Digital systems (contd.); inverse systems, stability, FIR and IIR,
Digital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 6 Digital systems (contd.); inverse systems, stability, FIR and IIR,
ROUTH S STABILITY CRITERION
 ECE 680 Modern Automatic Control Routh s Stability Criterion June 13, 2007 1 ROUTH S STABILITY CRITERION Consider a closed-loop transfer function H(s) = b 0s m + b 1 s m 1 + + b m 1 s + b m a 0 s n + s
ECE 680 Modern Automatic Control Routh s Stability Criterion June 13, 2007 1 ROUTH S STABILITY CRITERION Consider a closed-loop transfer function H(s) = b 0s m + b 1 s m 1 + + b m 1 s + b m a 0 s n + s
MATH 132: CALCULUS II SYLLABUS
 MATH 32: CALCULUS II SYLLABUS Prerequisites: Successful completion of Math 3 (or its equivalent elsewhere). Math 27 is normally not a sufficient prerequisite for Math 32. Required Text: Calculus: Early
MATH 32: CALCULUS II SYLLABUS Prerequisites: Successful completion of Math 3 (or its equivalent elsewhere). Math 27 is normally not a sufficient prerequisite for Math 32. Required Text: Calculus: Early
The degree of a polynomial function is equal to the highest exponent found on the independent variables.
 DETAILED SOLUTIONS AND CONCEPTS - POLYNOMIAL FUNCTIONS Prepared by Ingrid Stewart, Ph.D., College of Southern Nevada Please Send Questions and Comments to ingrid.stewart@csn.edu. Thank you! PLEASE NOTE
DETAILED SOLUTIONS AND CONCEPTS - POLYNOMIAL FUNCTIONS Prepared by Ingrid Stewart, Ph.D., College of Southern Nevada Please Send Questions and Comments to ingrid.stewart@csn.edu. Thank you! PLEASE NOTE
Solution of Linear Systems
 Chapter 3 Solution of Linear Systems In this chapter we study algorithms for possibly the most commonly occurring problem in scientific computing, the solution of linear systems of equations. We start
Chapter 3 Solution of Linear Systems In this chapter we study algorithms for possibly the most commonly occurring problem in scientific computing, the solution of linear systems of equations. We start
MATH 590: Meshfree Methods
 MATH 590: Meshfree Methods Chapter 7: Conditionally Positive Definite Functions Greg Fasshauer Department of Applied Mathematics Illinois Institute of Technology Fall 2010 fasshauer@iit.edu MATH 590 Chapter
MATH 590: Meshfree Methods Chapter 7: Conditionally Positive Definite Functions Greg Fasshauer Department of Applied Mathematics Illinois Institute of Technology Fall 2010 fasshauer@iit.edu MATH 590 Chapter
AN INTRODUCTION TO NUMERICAL METHODS AND ANALYSIS
 AN INTRODUCTION TO NUMERICAL METHODS AND ANALYSIS Revised Edition James Epperson Mathematical Reviews BICENTENNIAL 0, 1 8 0 7 z ewiley wu 2007 r71 BICENTENNIAL WILEY-INTERSCIENCE A John Wiley & Sons, Inc.,
AN INTRODUCTION TO NUMERICAL METHODS AND ANALYSIS Revised Edition James Epperson Mathematical Reviews BICENTENNIAL 0, 1 8 0 7 z ewiley wu 2007 r71 BICENTENNIAL WILEY-INTERSCIENCE A John Wiley & Sons, Inc.,
Numerical Matrix Analysis
 Numerical Matrix Analysis Lecture Notes #10 Conditioning and / Peter Blomgren, blomgren.peter@gmail.com Department of Mathematics and Statistics Dynamical Systems Group Computational Sciences Research
Numerical Matrix Analysis Lecture Notes #10 Conditioning and / Peter Blomgren, blomgren.peter@gmail.com Department of Mathematics and Statistics Dynamical Systems Group Computational Sciences Research
WHAT ARE MATHEMATICAL PROOFS AND WHY THEY ARE IMPORTANT?
 WHAT ARE MATHEMATICAL PROOFS AND WHY THEY ARE IMPORTANT? introduction Many students seem to have trouble with the notion of a mathematical proof. People that come to a course like Math 216, who certainly
WHAT ARE MATHEMATICAL PROOFS AND WHY THEY ARE IMPORTANT? introduction Many students seem to have trouble with the notion of a mathematical proof. People that come to a course like Math 216, who certainly
Notes on Factoring. MA 206 Kurt Bryan
 The General Approach Notes on Factoring MA 26 Kurt Bryan Suppose I hand you n, a 2 digit integer and tell you that n is composite, with smallest prime factor around 5 digits. Finding a nontrivial factor
The General Approach Notes on Factoring MA 26 Kurt Bryan Suppose I hand you n, a 2 digit integer and tell you that n is composite, with smallest prime factor around 5 digits. Finding a nontrivial factor
Chebyshev Expansions
 Chapter 3 Chebyshev Expansions The best is the cheapest. Benjamin Franklin 3.1 Introduction In Chapter, approximations were considered consisting of expansions around a specific value of the variable (finite
Chapter 3 Chebyshev Expansions The best is the cheapest. Benjamin Franklin 3.1 Introduction In Chapter, approximations were considered consisting of expansions around a specific value of the variable (finite
Sequences and Series
 Sequences and Series Consider the following sum: 2 + 4 + 8 + 6 + + 2 i + The dots at the end indicate that the sum goes on forever. Does this make sense? Can we assign a numerical value to an infinite
Sequences and Series Consider the following sum: 2 + 4 + 8 + 6 + + 2 i + The dots at the end indicate that the sum goes on forever. Does this make sense? Can we assign a numerical value to an infinite
Math Review. for the Quantitative Reasoning Measure of the GRE revised General Test
 Math Review for the Quantitative Reasoning Measure of the GRE revised General Test www.ets.org Overview This Math Review will familiarize you with the mathematical skills and concepts that are important
Math Review for the Quantitative Reasoning Measure of the GRE revised General Test www.ets.org Overview This Math Review will familiarize you with the mathematical skills and concepts that are important
Overview. Essential Questions. Precalculus, Quarter 4, Unit 4.5 Build Arithmetic and Geometric Sequences and Series
 Sequences and Series Overview Number of instruction days: 4 6 (1 day = 53 minutes) Content to Be Learned Write arithmetic and geometric sequences both recursively and with an explicit formula, use them
Sequences and Series Overview Number of instruction days: 4 6 (1 day = 53 minutes) Content to Be Learned Write arithmetic and geometric sequences both recursively and with an explicit formula, use them
Information Theory and Coding Prof. S. N. Merchant Department of Electrical Engineering Indian Institute of Technology, Bombay
 Information Theory and Coding Prof. S. N. Merchant Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 17 Shannon-Fano-Elias Coding and Introduction to Arithmetic Coding
Information Theory and Coding Prof. S. N. Merchant Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 17 Shannon-Fano-Elias Coding and Introduction to Arithmetic Coding
Nonlinear Iterative Partial Least Squares Method
 Numerical Methods for Determining Principal Component Analysis Abstract Factors Béchu, S., Richard-Plouet, M., Fernandez, V., Walton, J., and Fairley, N. (2016) Developments in numerical treatments for
Numerical Methods for Determining Principal Component Analysis Abstract Factors Béchu, S., Richard-Plouet, M., Fernandez, V., Walton, J., and Fairley, N. (2016) Developments in numerical treatments for
Signal to Noise Instrumental Excel Assignment
 Signal to Noise Instrumental Excel Assignment Instrumental methods, as all techniques involved in physical measurements, are limited by both the precision and accuracy. The precision and accuracy of a
Signal to Noise Instrumental Excel Assignment Instrumental methods, as all techniques involved in physical measurements, are limited by both the precision and accuracy. The precision and accuracy of a
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS. + + x 2. x n. a 11 a 12 a 1n b 1 a 21 a 22 a 2n b 2 a 31 a 32 a 3n b 3. a m1 a m2 a mn b m
 MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS 1. SYSTEMS OF EQUATIONS AND MATRICES 1.1. Representation of a linear system. The general system of m equations in n unknowns can be written a 11 x 1 + a 12 x 2 +
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS 1. SYSTEMS OF EQUATIONS AND MATRICES 1.1. Representation of a linear system. The general system of m equations in n unknowns can be written a 11 x 1 + a 12 x 2 +
Measures of Error: for exact x and approximation x Absolute error e = x x. Relative error r = (x x )/x.
/x.") ERRORS and COMPUTER ARITHMETIC Types of Error in Numerical Calculations Initial Data Errors: from experiment, modeling, computer representation; problem dependent but need to know at beginning of calculation.
ERRORS and COMPUTER ARITHMETIC Types of Error in Numerical Calculations Initial Data Errors: from experiment, modeling, computer representation; problem dependent but need to know at beginning of calculation.
Integer Factorization using the Quadratic Sieve
 Integer Factorization using the Quadratic Sieve Chad Seibert* Division of Science and Mathematics University of Minnesota, Morris Morris, MN 56567 seib0060@morris.umn.edu March 16, 2011 Abstract We give
Integer Factorization using the Quadratic Sieve Chad Seibert* Division of Science and Mathematics University of Minnesota, Morris Morris, MN 56567 seib0060@morris.umn.edu March 16, 2011 Abstract We give
How To Understand And Solve Algebraic Equations
 College Algebra Course Text Barnett, Raymond A., Michael R. Ziegler, and Karl E. Byleen. College Algebra, 8th edition, McGraw-Hill, 2008, ISBN: 978-0-07-286738-1 Course Description This course provides
College Algebra Course Text Barnett, Raymond A., Michael R. Ziegler, and Karl E. Byleen. College Algebra, 8th edition, McGraw-Hill, 2008, ISBN: 978-0-07-286738-1 Course Description This course provides
3. Interpolation. Closing the Gaps of Discretization... Beyond Polynomials
 3. Interpolation Closing the Gaps of Discretization... Beyond Polynomials Closing the Gaps of Discretization... Beyond Polynomials, December 19, 2012 1 3.3. Polynomial Splines Idea of Polynomial Splines
3. Interpolation Closing the Gaps of Discretization... Beyond Polynomials Closing the Gaps of Discretization... Beyond Polynomials, December 19, 2012 1 3.3. Polynomial Splines Idea of Polynomial Splines
Chapter 6: The Information Function 129. CHAPTER 7 Test Calibration
 Chapter 6: The Information Function 129 CHAPTER 7 Test Calibration 130 Chapter 7: Test Calibration CHAPTER 7 Test Calibration For didactic purposes, all of the preceding chapters have assumed that the
Chapter 6: The Information Function 129 CHAPTER 7 Test Calibration 130 Chapter 7: Test Calibration CHAPTER 7 Test Calibration For didactic purposes, all of the preceding chapters have assumed that the
Florida Math for College Readiness
 Core Florida Math for College Readiness Florida Math for College Readiness provides a fourth-year math curriculum focused on developing the mastery of skills identified as critical to postsecondary readiness
Core Florida Math for College Readiness Florida Math for College Readiness provides a fourth-year math curriculum focused on developing the mastery of skills identified as critical to postsecondary readiness
POISSON AND LAPLACE EQUATIONS. Charles R. O Neill. School of Mechanical and Aerospace Engineering. Oklahoma State University. Stillwater, OK 74078
 21 ELLIPTICAL PARTIAL DIFFERENTIAL EQUATIONS: POISSON AND LAPLACE EQUATIONS Charles R. O Neill School of Mechanical and Aerospace Engineering Oklahoma State University Stillwater, OK 74078 2nd Computer
21 ELLIPTICAL PARTIAL DIFFERENTIAL EQUATIONS: POISSON AND LAPLACE EQUATIONS Charles R. O Neill School of Mechanical and Aerospace Engineering Oklahoma State University Stillwater, OK 74078 2nd Computer
Mean value theorem, Taylors Theorem, Maxima and Minima.
 MA 001 Preparatory Mathematics I. Complex numbers as ordered pairs. Argand s diagram. Triangle inequality. De Moivre s Theorem. Algebra: Quadratic equations and express-ions. Permutations and Combinations.
MA 001 Preparatory Mathematics I. Complex numbers as ordered pairs. Argand s diagram. Triangle inequality. De Moivre s Theorem. Algebra: Quadratic equations and express-ions. Permutations and Combinations.
General Framework for an Iterative Solution of Ax b. Jacobi s Method
 2.6 Iterative Solutions of Linear Systems 143 2.6 Iterative Solutions of Linear Systems Consistent linear systems in real life are solved in one of two ways: by direct calculation (using a matrix factorization,
2.6 Iterative Solutions of Linear Systems 143 2.6 Iterative Solutions of Linear Systems Consistent linear systems in real life are solved in one of two ways: by direct calculation (using a matrix factorization,
(!' ) "' # "*# "!(!' +,
 ' # *# !(!' +,") MATLAB is a numeric computation software for engineering and scientific calculations. The name MATLAB stands for MATRIX LABORATORY. MATLAB is primarily a tool for matrix computations. It was developed
MATLAB is a numeric computation software for engineering and scientific calculations. The name MATLAB stands for MATRIX LABORATORY. MATLAB is primarily a tool for matrix computations. It was developed
Algebra Unpacked Content For the new Common Core standards that will be effective in all North Carolina schools in the 2012-13 school year.
 This document is designed to help North Carolina educators teach the Common Core (Standard Course of Study). NCDPI staff are continually updating and improving these tools to better serve teachers. Algebra
This document is designed to help North Carolina educators teach the Common Core (Standard Course of Study). NCDPI staff are continually updating and improving these tools to better serve teachers. Algebra
The Quadratic Sieve Factoring Algorithm
 The Quadratic Sieve Factoring Algorithm Eric Landquist MATH 488: Cryptographic Algorithms December 14, 2001 1 Introduction Mathematicians have been attempting to find better and faster ways to factor composite
The Quadratic Sieve Factoring Algorithm Eric Landquist MATH 488: Cryptographic Algorithms December 14, 2001 1 Introduction Mathematicians have been attempting to find better and faster ways to factor composite
Computer programming course in the Department of Physics, University of Calcutta
 Computer programming course in the Department of Physics, University of Calcutta Parongama Sen with inputs from Prof. S. Dasgupta and Dr. J. Saha and feedback from students Computer programming course
Computer programming course in the Department of Physics, University of Calcutta Parongama Sen with inputs from Prof. S. Dasgupta and Dr. J. Saha and feedback from students Computer programming course
Roots of Polynomials
 Roots of Polynomials (Com S 477/577 Notes) Yan-Bin Jia Sep 24, 2015 A direct corollary of the fundamental theorem of algebra is that p(x) can be factorized over the complex domain into a product a n (x
Roots of Polynomials (Com S 477/577 Notes) Yan-Bin Jia Sep 24, 2015 A direct corollary of the fundamental theorem of algebra is that p(x) can be factorized over the complex domain into a product a n (x
arxiv:hep-th/0507236v1 25 Jul 2005
 Non perturbative series for the calculation of one loop integrals at finite temperature Paolo Amore arxiv:hep-th/050736v 5 Jul 005 Facultad de Ciencias, Universidad de Colima, Bernal Diaz del Castillo
Non perturbative series for the calculation of one loop integrals at finite temperature Paolo Amore arxiv:hep-th/050736v 5 Jul 005 Facultad de Ciencias, Universidad de Colima, Bernal Diaz del Castillo
MATH 4330/5330, Fourier Analysis Section 11, The Discrete Fourier Transform
 MATH 433/533, Fourier Analysis Section 11, The Discrete Fourier Transform Now, instead of considering functions defined on a continuous domain, like the interval [, 1) or the whole real line R, we wish
MATH 433/533, Fourier Analysis Section 11, The Discrete Fourier Transform Now, instead of considering functions defined on a continuous domain, like the interval [, 1) or the whole real line R, we wish
Short Programs for functions on Curves
 Short Programs for functions on Curves Victor S. Miller Exploratory Computer Science IBM, Thomas J. Watson Research Center Yorktown Heights, NY 10598 May 6, 1986 Abstract The problem of deducing a function
Short Programs for functions on Curves Victor S. Miller Exploratory Computer Science IBM, Thomas J. Watson Research Center Yorktown Heights, NY 10598 May 6, 1986 Abstract The problem of deducing a function
Numerical Analysis Introduction. Student Audience. Prerequisites. Technology.
 Numerical Analysis Douglas Faires, Youngstown State University, (Chair, 2012-2013) Elizabeth Yanik, Emporia State University, (Chair, 2013-2015) Graeme Fairweather, Executive Editor, Mathematical Reviews,
Numerical Analysis Douglas Faires, Youngstown State University, (Chair, 2012-2013) Elizabeth Yanik, Emporia State University, (Chair, 2013-2015) Graeme Fairweather, Executive Editor, Mathematical Reviews,
The Characteristic Polynomial
 Physics 116A Winter 2011 The Characteristic Polynomial 1 Coefficients of the characteristic polynomial Consider the eigenvalue problem for an n n matrix A, A v = λ v, v 0 (1) The solution to this problem
Physics 116A Winter 2011 The Characteristic Polynomial 1 Coefficients of the characteristic polynomial Consider the eigenvalue problem for an n n matrix A, A v = λ v, v 0 (1) The solution to this problem
FACTORING POLYNOMIALS IN THE RING OF FORMAL POWER SERIES OVER Z
 FACTORING POLYNOMIALS IN THE RING OF FORMAL POWER SERIES OVER Z DANIEL BIRMAJER, JUAN B GIL, AND MICHAEL WEINER Abstract We consider polynomials with integer coefficients and discuss their factorization
FACTORING POLYNOMIALS IN THE RING OF FORMAL POWER SERIES OVER Z DANIEL BIRMAJER, JUAN B GIL, AND MICHAEL WEINER Abstract We consider polynomials with integer coefficients and discuss their factorization
Matrices and Polynomials
 APPENDIX 9 Matrices and Polynomials he Multiplication of Polynomials Let α(z) =α 0 +α 1 z+α 2 z 2 + α p z p and y(z) =y 0 +y 1 z+y 2 z 2 + y n z n be two polynomials of degrees p and n respectively. hen,
APPENDIX 9 Matrices and Polynomials he Multiplication of Polynomials Let α(z) =α 0 +α 1 z+α 2 z 2 + α p z p and y(z) =y 0 +y 1 z+y 2 z 2 + y n z n be two polynomials of degrees p and n respectively. hen,
CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION 1. BASIC DIVISIBILITY THEORY
 January 10, 2010 CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION 1. BASIC DIVISIBILITY THEORY The set of polynomials over a field F is a ring, whose structure shares with the ring of integers many characteristics.
January 10, 2010 CHAPTER SIX IRREDUCIBILITY AND FACTORIZATION 1. BASIC DIVISIBILITY THEORY The set of polynomials over a field F is a ring, whose structure shares with the ring of integers many characteristics.
Math 115 Spring 2011 Written Homework 5 Solutions
 . Evaluate each series. a) 4 7 0... 55 Math 5 Spring 0 Written Homework 5 Solutions Solution: We note that the associated sequence, 4, 7, 0,..., 55 appears to be an arithmetic sequence. If the sequence
. Evaluate each series. a) 4 7 0... 55 Math 5 Spring 0 Written Homework 5 Solutions Solution: We note that the associated sequence, 4, 7, 0,..., 55 appears to be an arithmetic sequence. If the sequence
Demand Forecasting When a product is produced for a market, the demand occurs in the future. The production planning cannot be accomplished unless
 Demand Forecasting When a product is produced for a market, the demand occurs in the future. The production planning cannot be accomplished unless the volume of the demand known. The success of the business
Demand Forecasting When a product is produced for a market, the demand occurs in the future. The production planning cannot be accomplished unless the volume of the demand known. The success of the business
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS
 MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS Systems of Equations and Matrices Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS Systems of Equations and Matrices Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
Roots of Equations (Chapters 5 and 6)
") Roots of Equations (Chapters 5 and 6) Problem: given f() = 0, find. In general, f() can be any function. For some forms of f(), analytical solutions are available. However, for other functions, we have
Roots of Equations (Chapters 5 and 6) Problem: given f() = 0, find. In general, f() can be any function. For some forms of f(), analytical solutions are available. However, for other functions, we have
Dynamics at the Horsetooth, Volume 2A, Focussed Issue: Asymptotics and Perturbations
 Dynamics at the Horsetooth, Volume A, Focussed Issue: Asymptotics and Perturbations Asymptotic Expansion of Bessel Functions; Applications to Electromagnetics Department of Electrical Engineering Colorado
Dynamics at the Horsetooth, Volume A, Focussed Issue: Asymptotics and Perturbations Asymptotic Expansion of Bessel Functions; Applications to Electromagnetics Department of Electrical Engineering Colorado
FFT Algorithms. Chapter 6. Contents 6.1
 Chapter 6 FFT Algorithms Contents Efficient computation of the DFT............................................ 6.2 Applications of FFT................................................... 6.6 Computing DFT
Chapter 6 FFT Algorithms Contents Efficient computation of the DFT............................................ 6.2 Applications of FFT................................................... 6.6 Computing DFT
G.A. Pavliotis. Department of Mathematics. Imperial College London
 EE1 MATHEMATICS NUMERICAL METHODS G.A. Pavliotis Department of Mathematics Imperial College London 1. Numerical solution of nonlinear equations (iterative processes). 2. Numerical evaluation of integrals.
EE1 MATHEMATICS NUMERICAL METHODS G.A. Pavliotis Department of Mathematics Imperial College London 1. Numerical solution of nonlinear equations (iterative processes). 2. Numerical evaluation of integrals.
Cloud Storage and Online Bin Packing
 Cloud Storage and Online Bin Packing Doina Bein, Wolfgang Bein, and Swathi Venigella Abstract We study the problem of allocating memory of servers in a data center based on online requests for storage.
Cloud Storage and Online Bin Packing Doina Bein, Wolfgang Bein, and Swathi Venigella Abstract We study the problem of allocating memory of servers in a data center based on online requests for storage.
Common Core Unit Summary Grades 6 to 8
 Common Core Unit Summary Grades 6 to 8 Grade 8: Unit 1: Congruence and Similarity- 8G1-8G5 rotations reflections and translations,( RRT=congruence) understand congruence of 2 d figures after RRT Dilations
Common Core Unit Summary Grades 6 to 8 Grade 8: Unit 1: Congruence and Similarity- 8G1-8G5 rotations reflections and translations,( RRT=congruence) understand congruence of 2 d figures after RRT Dilations
Lecture 3: Finding integer solutions to systems of linear equations
 Lecture 3: Finding integer solutions to systems of linear equations Algorithmic Number Theory (Fall 2014) Rutgers University Swastik Kopparty Scribe: Abhishek Bhrushundi 1 Overview The goal of this lecture
Lecture 3: Finding integer solutions to systems of linear equations Algorithmic Number Theory (Fall 2014) Rutgers University Swastik Kopparty Scribe: Abhishek Bhrushundi 1 Overview The goal of this lecture
METHODOLOGICAL CONSIDERATIONS OF DRIVE SYSTEM SIMULATION, WHEN COUPLING FINITE ELEMENT MACHINE MODELS WITH THE CIRCUIT SIMULATOR MODELS OF CONVERTERS.
 SEDM 24 June 16th - 18th, CPRI (Italy) METHODOLOGICL CONSIDERTIONS OF DRIVE SYSTEM SIMULTION, WHEN COUPLING FINITE ELEMENT MCHINE MODELS WITH THE CIRCUIT SIMULTOR MODELS OF CONVERTERS. Áron Szûcs BB Electrical
SEDM 24 June 16th - 18th, CPRI (Italy) METHODOLOGICL CONSIDERTIONS OF DRIVE SYSTEM SIMULTION, WHEN COUPLING FINITE ELEMENT MCHINE MODELS WITH THE CIRCUIT SIMULTOR MODELS OF CONVERTERS. Áron Szûcs BB Electrical
CALIBRATION OF A ROBUST 2 DOF PATH MONITORING TOOL FOR INDUSTRIAL ROBOTS AND MACHINE TOOLS BASED ON PARALLEL KINEMATICS
 CALIBRATION OF A ROBUST 2 DOF PATH MONITORING TOOL FOR INDUSTRIAL ROBOTS AND MACHINE TOOLS BASED ON PARALLEL KINEMATICS E. Batzies 1, M. Kreutzer 1, D. Leucht 2, V. Welker 2, O. Zirn 1 1 Mechatronics Research
CALIBRATION OF A ROBUST 2 DOF PATH MONITORING TOOL FOR INDUSTRIAL ROBOTS AND MACHINE TOOLS BASED ON PARALLEL KINEMATICS E. Batzies 1, M. Kreutzer 1, D. Leucht 2, V. Welker 2, O. Zirn 1 1 Mechatronics Research
Georgia Department of Education Kathy Cox, State Superintendent of Schools 7/19/2005 All Rights Reserved 1
 Accelerated Mathematics 3 This is a course in precalculus and statistics, designed to prepare students to take AB or BC Advanced Placement Calculus. It includes rational, circular trigonometric, and inverse
Accelerated Mathematics 3 This is a course in precalculus and statistics, designed to prepare students to take AB or BC Advanced Placement Calculus. It includes rational, circular trigonometric, and inverse
MATHEMATICAL METHODS OF STATISTICS
 MATHEMATICAL METHODS OF STATISTICS By HARALD CRAMER TROFESSOK IN THE UNIVERSITY OF STOCKHOLM Princeton PRINCETON UNIVERSITY PRESS 1946 TABLE OF CONTENTS. First Part. MATHEMATICAL INTRODUCTION. CHAPTERS
MATHEMATICAL METHODS OF STATISTICS By HARALD CRAMER TROFESSOK IN THE UNIVERSITY OF STOCKHOLM Princeton PRINCETON UNIVERSITY PRESS 1946 TABLE OF CONTENTS. First Part. MATHEMATICAL INTRODUCTION. CHAPTERS
December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B. KITCHENS
 December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B KITCHENS The equation 1 Lines in two-dimensional space (1) 2x y = 3 describes a line in two-dimensional space The coefficients of x and y in the equation
December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B KITCHENS The equation 1 Lines in two-dimensional space (1) 2x y = 3 describes a line in two-dimensional space The coefficients of x and y in the equation
INTEGRAL METHODS IN LOW-FREQUENCY ELECTROMAGNETICS
 INTEGRAL METHODS IN LOW-FREQUENCY ELECTROMAGNETICS I. Dolezel Czech Technical University, Praha, Czech Republic P. Karban University of West Bohemia, Plzeft, Czech Republic P. Solin University of Nevada,
INTEGRAL METHODS IN LOW-FREQUENCY ELECTROMAGNETICS I. Dolezel Czech Technical University, Praha, Czech Republic P. Karban University of West Bohemia, Plzeft, Czech Republic P. Solin University of Nevada,
Mathematics 31 Pre-calculus and Limits
 Mathematics 31 Pre-calculus and Limits Overview After completing this section, students will be epected to have acquired reliability and fluency in the algebraic skills of factoring, operations with radicals
Mathematics 31 Pre-calculus and Limits Overview After completing this section, students will be epected to have acquired reliability and fluency in the algebraic skills of factoring, operations with radicals
Homework until Test #2
 MATH31: Number Theory Homework until Test # Philipp BRAUN Section 3.1 page 43, 1. It has been conjectured that there are infinitely many primes of the form n. Exhibit five such primes. Solution. Five such
MATH31: Number Theory Homework until Test # Philipp BRAUN Section 3.1 page 43, 1. It has been conjectured that there are infinitely many primes of the form n. Exhibit five such primes. Solution. Five such
By choosing to view this document, you agree to all provisions of the copyright laws protecting it.
 This material is posted here with permission of the IEEE Such permission of the IEEE does not in any way imply IEEE endorsement of any of Helsinki University of Technology's products or services Internal
This material is posted here with permission of the IEEE Such permission of the IEEE does not in any way imply IEEE endorsement of any of Helsinki University of Technology's products or services Internal
How High a Degree is High Enough for High Order Finite Elements?
 This space is reserved for the Procedia header, do not use it How High a Degree is High Enough for High Order Finite Elements? William F. National Institute of Standards and Technology, Gaithersburg, Maryland,
This space is reserved for the Procedia header, do not use it How High a Degree is High Enough for High Order Finite Elements? William F. National Institute of Standards and Technology, Gaithersburg, Maryland,
Sensitivity Analysis 3.1 AN EXAMPLE FOR ANALYSIS
 Sensitivity Analysis 3 We have already been introduced to sensitivity analysis in Chapter via the geometry of a simple example. We saw that the values of the decision variables and those of the slack and
Sensitivity Analysis 3 We have already been introduced to sensitivity analysis in Chapter via the geometry of a simple example. We saw that the values of the decision variables and those of the slack and
Mathematics (MAT) MAT 061 Basic Euclidean Geometry 3 Hours. MAT 051 Pre-Algebra 4 Hours
 MAT 061 Basic Euclidean Geometry 3 Hours. MAT 051 Pre-Algebra 4 Hours") MAT 051 Pre-Algebra Mathematics (MAT) MAT 051 is designed as a review of the basic operations of arithmetic and an introduction to algebra. The student must earn a grade of C or in order to enroll in MAT
MAT 051 Pre-Algebra Mathematics (MAT) MAT 051 is designed as a review of the basic operations of arithmetic and an introduction to algebra. The student must earn a grade of C or in order to enroll in MAT
Reproductions supplied by EDRS are the best that can be made from the original document.
 DOCUMENT RESUME ED 469 079 SE 066 824 AUTHOR Rochowicz, John A., Jr. TITLE Calculating the Variables of Finance on a Spreadsheet. PUB DATE 2002-00-00 NOTE 21p. PUB TYPE Reports Descriptive (141) EDRS PRICE
DOCUMENT RESUME ED 469 079 SE 066 824 AUTHOR Rochowicz, John A., Jr. TITLE Calculating the Variables of Finance on a Spreadsheet. PUB DATE 2002-00-00 NOTE 21p. PUB TYPE Reports Descriptive (141) EDRS PRICE
3. INNER PRODUCT SPACES
 . INNER PRODUCT SPACES.. Definition So far we have studied abstract vector spaces. These are a generalisation of the geometric spaces R and R. But these have more structure than just that of a vector space.
. INNER PRODUCT SPACES.. Definition So far we have studied abstract vector spaces. These are a generalisation of the geometric spaces R and R. But these have more structure than just that of a vector space.
SYSTEMS OF EQUATIONS AND MATRICES WITH THE TI-89. by Joseph Collison
 SYSTEMS OF EQUATIONS AND MATRICES WITH THE TI-89 by Joseph Collison Copyright 2000 by Joseph Collison All rights reserved Reproduction or translation of any part of this work beyond that permitted by Sections
SYSTEMS OF EQUATIONS AND MATRICES WITH THE TI-89 by Joseph Collison Copyright 2000 by Joseph Collison All rights reserved Reproduction or translation of any part of this work beyond that permitted by Sections
School of Mathematics, Computer Science and Engineering. Mathematics* Associate in Arts Degree COURSES, PROGRAMS AND MAJORS
 Mathematics School of Mathematics, Computer Science and Engineering Dean: Lianna Zhao, MD Academic Chair: Miriam Castroconde Faculty: Miriam Castroconde; Terry Cheng; Howard Dachslager, PhD; Ilknur Erbas
Mathematics School of Mathematics, Computer Science and Engineering Dean: Lianna Zhao, MD Academic Chair: Miriam Castroconde Faculty: Miriam Castroconde; Terry Cheng; Howard Dachslager, PhD; Ilknur Erbas
ADVANCED SCHOOL OF SYSTEMS AND DATA STUDIES (ASSDAS) PROGRAM: CTech in Computer Science
 PROGRAM: CTech in Computer Science") ADVANCED SCHOOL OF SYSTEMS AND DATA STUDIES (ASSDAS) PROGRAM: CTech in Computer Science Program Schedule CTech Computer Science Credits CS101 Computer Science I 3 MATH100 Foundations of Mathematics and
ADVANCED SCHOOL OF SYSTEMS AND DATA STUDIES (ASSDAS) PROGRAM: CTech in Computer Science Program Schedule CTech Computer Science Credits CS101 Computer Science I 3 MATH100 Foundations of Mathematics and
Arithmetic and Algebra of Matrices
 Arithmetic and Algebra of Matrices Math 572: Algebra for Middle School Teachers The University of Montana 1 The Real Numbers 2 Classroom Connection: Systems of Linear Equations 3 Rational Numbers 4 Irrational
Arithmetic and Algebra of Matrices Math 572: Algebra for Middle School Teachers The University of Montana 1 The Real Numbers 2 Classroom Connection: Systems of Linear Equations 3 Rational Numbers 4 Irrational
WESTMORELAND COUNTY PUBLIC SCHOOLS 2011 2012 Integrated Instructional Pacing Guide and Checklist Computer Math
 Textbook Correlation WESTMORELAND COUNTY PUBLIC SCHOOLS 2011 2012 Integrated Instructional Pacing Guide and Checklist Computer Math Following Directions Unit FIRST QUARTER AND SECOND QUARTER Logic Unit
Textbook Correlation WESTMORELAND COUNTY PUBLIC SCHOOLS 2011 2012 Integrated Instructional Pacing Guide and Checklist Computer Math Following Directions Unit FIRST QUARTER AND SECOND QUARTER Logic Unit
How To Prove The Dirichlet Unit Theorem
 Chapter 6 The Dirichlet Unit Theorem As usual, we will be working in the ring B of algebraic integers of a number field L. Two factorizations of an element of B are regarded as essentially the same if
Chapter 6 The Dirichlet Unit Theorem As usual, we will be working in the ring B of algebraic integers of a number field L. Two factorizations of an element of B are regarded as essentially the same if
What are the place values to the left of the decimal point and their associated powers of ten?
 The verbal answers to all of the following questions should be memorized before completion of algebra. Answers that are not memorized will hinder your ability to succeed in geometry and algebra. (Everything
The verbal answers to all of the following questions should be memorized before completion of algebra. Answers that are not memorized will hinder your ability to succeed in geometry and algebra. (Everything
10.2 Series and Convergence
 10.2 Series and Convergence Write sums using sigma notation Find the partial sums of series and determine convergence or divergence of infinite series Find the N th partial sums of geometric series and
10.2 Series and Convergence Write sums using sigma notation Find the partial sums of series and determine convergence or divergence of infinite series Find the N th partial sums of geometric series and
FPGA Implementation of an Extended Binary GCD Algorithm for Systolic Reduction of Rational Numbers
 FPGA Implementation of an Extended Binary GCD Algorithm for Systolic Reduction of Rational Numbers Bogdan Mătăsaru and Tudor Jebelean RISC-Linz, A 4040 Linz, Austria email: bmatasar@risc.uni-linz.ac.at
FPGA Implementation of an Extended Binary GCD Algorithm for Systolic Reduction of Rational Numbers Bogdan Mătăsaru and Tudor Jebelean RISC-Linz, A 4040 Linz, Austria email: bmatasar@risc.uni-linz.ac.at
Algebra 2 Chapter 1 Vocabulary. identity - A statement that equates two equivalent expressions.
 Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
Eastern Washington University Department of Computer Science. Questionnaire for Prospective Masters in Computer Science Students
 Eastern Washington University Department of Computer Science Questionnaire for Prospective Masters in Computer Science Students I. Personal Information Name: Last First M.I. Mailing Address: Permanent
Eastern Washington University Department of Computer Science Questionnaire for Prospective Masters in Computer Science Students I. Personal Information Name: Last First M.I. Mailing Address: Permanent
F.IF.7b: Graph Root, Piecewise, Step, & Absolute Value Functions
 F.IF.7b: Graph Root, Piecewise, Step, & Absolute Value Functions F.IF.7b: Graph Root, Piecewise, Step, & Absolute Value Functions Analyze functions using different representations. 7. Graph functions expressed
F.IF.7b: Graph Root, Piecewise, Step, & Absolute Value Functions F.IF.7b: Graph Root, Piecewise, Step, & Absolute Value Functions Analyze functions using different representations. 7. Graph functions expressed
Estimated Pre Calculus Pacing Timeline
 Estimated Pre Calculus Pacing Timeline 2010-2011 School Year The timeframes listed on this calendar are estimates based on a fifty-minute class period. You may need to adjust some of them from time to
Estimated Pre Calculus Pacing Timeline 2010-2011 School Year The timeframes listed on this calendar are estimates based on a fifty-minute class period. You may need to adjust some of them from time to
An Efficient and Secure Key Management Scheme for Hierarchical Access Control Based on ECC
 An Efficient and Secure Key Management Scheme for Hierarchical Access Control Based on ECC Laxminath Tripathy 1 Nayan Ranjan Paul 2 1Department of Information technology, Eastern Academy of Science and
An Efficient and Secure Key Management Scheme for Hierarchical Access Control Based on ECC Laxminath Tripathy 1 Nayan Ranjan Paul 2 1Department of Information technology, Eastern Academy of Science and
Performance Tuning of a CFD Code on the Earth Simulator
 Applications on HPC Special Issue on High Performance Computing Performance Tuning of a CFD Code on the Earth Simulator By Ken ichi ITAKURA,* Atsuya UNO,* Mitsuo YOKOKAWA, Minoru SAITO, Takashi ISHIHARA
Applications on HPC Special Issue on High Performance Computing Performance Tuning of a CFD Code on the Earth Simulator By Ken ichi ITAKURA,* Atsuya UNO,* Mitsuo YOKOKAWA, Minoru SAITO, Takashi ISHIHARA
Mathematics Review for MS Finance Students
 Mathematics Review for MS Finance Students Anthony M. Marino Department of Finance and Business Economics Marshall School of Business Lecture 1: Introductory Material Sets The Real Number System Functions,
Mathematics Review for MS Finance Students Anthony M. Marino Department of Finance and Business Economics Marshall School of Business Lecture 1: Introductory Material Sets The Real Number System Functions,
with functions, expressions and equations which follow in units 3 and 4.
 Grade 8 Overview View unit yearlong overview here The unit design was created in line with the areas of focus for grade 8 Mathematics as identified by the Common Core State Standards and the PARCC Model
Grade 8 Overview View unit yearlong overview here The unit design was created in line with the areas of focus for grade 8 Mathematics as identified by the Common Core State Standards and the PARCC Model
Fast Multipole Method for particle interactions: an open source parallel library component
 Fast Multipole Method for particle interactions: an open source parallel library component F. A. Cruz 1,M.G.Knepley 2,andL.A.Barba 1 1 Department of Mathematics, University of Bristol, University Walk,
Fast Multipole Method for particle interactions: an open source parallel library component F. A. Cruz 1,M.G.Knepley 2,andL.A.Barba 1 1 Department of Mathematics, University of Bristol, University Walk,
Influence of Load Balancing on Quality of Real Time Data Transmission*
 SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 6, No. 3, December 2009, 515-524 UDK: 004.738.2 Influence of Load Balancing on Quality of Real Time Data Transmission* Nataša Maksić 1,a, Petar Knežević 2,
SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 6, No. 3, December 2009, 515-524 UDK: 004.738.2 Influence of Load Balancing on Quality of Real Time Data Transmission* Nataša Maksić 1,a, Petar Knežević 2,
A Coefficient of Variation for Skewed and Heavy-Tailed Insurance Losses. Michael R. Powers[ 1 ] Temple University and Tsinghua University
![A Coefficient of Variation for Skewed and Heavy-Tailed Insurance Losses. Michael R. Powers[ 1 ] Temple University and Tsinghua University](/thumbs/35/17199255.jpg "A Coefficient of Variation for Skewed and Heavy-Tailed Insurance Losses. Michael R. Powers[ 1 ] Temple University and Tsinghua University") A Coefficient of Variation for Skewed and Heavy-Tailed Insurance Losses Michael R. Powers[ ] Temple University and Tsinghua University Thomas Y. Powers Yale University [June 2009] Abstract We propose a
A Coefficient of Variation for Skewed and Heavy-Tailed Insurance Losses Michael R. Powers[ ] Temple University and Tsinghua University Thomas Y. Powers Yale University [June 2009] Abstract We propose a
Notes for AA214, Chapter 7. T. H. Pulliam Stanford University
 Notes for AA214, Chapter 7 T. H. Pulliam Stanford University 1 Stability of Linear Systems Stability will be defined in terms of ODE s and O E s ODE: Couples System O E : Matrix form from applying Eq.
Notes for AA214, Chapter 7 T. H. Pulliam Stanford University 1 Stability of Linear Systems Stability will be defined in terms of ODE s and O E s ODE: Couples System O E : Matrix form from applying Eq.
State of Stress at Point
 State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
Mathematics of Computation, Vol. 41, No. 163. (Jul., 1983), pp. 287-294.
, pp. 287-294.") Factoring Large Numbers with a Quadratic Sieve Joseph L. Gerver Mathematics of Computation, Vol. 41, No. 163. (Jul., 1983), pp. 287-294. Stable URL: http://links.jstor.org/sici?sici=0025-5718%28198307%2941%3a163%3c287%3aflnwaq%3e2.0.co%3b2-4
Factoring Large Numbers with a Quadratic Sieve Joseph L. Gerver Mathematics of Computation, Vol. 41, No. 163. (Jul., 1983), pp. 287-294. Stable URL: http://links.jstor.org/sici?sici=0025-5718%28198307%2941%3a163%3c287%3aflnwaq%3e2.0.co%3b2-4