Object tracking & Motion detection in video sequences
|
|
|
- Georgina Floyd
- 9 years ago
- Views:
Transcription
1 Introduction Object tracking & Motion detection in video sequences Recomended link: 1

2 2

3 DYNAMIC SCENE ANALYSIS The input to the dynamic scene analysis is a sequence of image frames F( x, y, t ) taken from the changing world. x, y are spatial coordinates. Frames are usually captured at fixed time intervals. t represents t-th frame in the sequence. 3

4 Typical Applikations Motion detection. Often from a static camera. Common in surveillance systems. Often performed on the pixel level only (due to speed constraints). Object localization. Focuses attention to a region of interest in the image. Data reduction. Often only interest points found which are used later to solve the correspondence problem. Motion segmentation Images are segmented into region corresponding to different moving objects. Three-dimensional shape from motion. Called also structure from motion. Similar problems as in stereo vision. Object tracking. A sparse set of features is often tracked, e.g., 4 corner points.


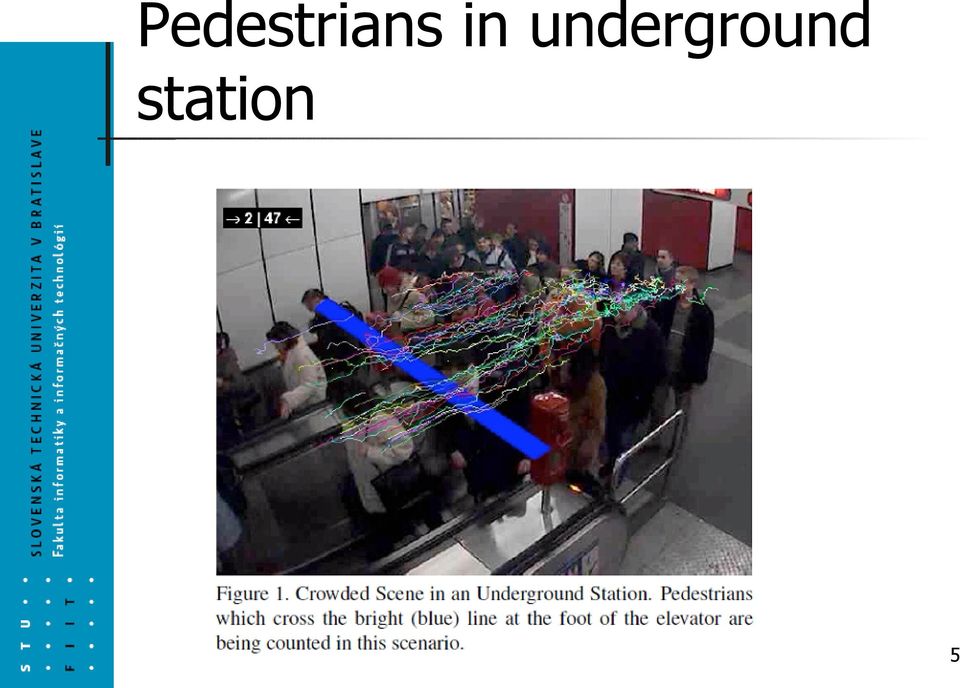
5 Pedestrians in underground station 5
6 Problem definition Assuming that the scene illumination does not change, the image changes are due to relative motion between the scene objects and the camera (observer). There are three possibilities: Stationary camera, moving objects. Moving camera, stationary objects. Moving camera, moving objects. 6

7 Motion field Motion field is a 2D representation in the image plane of a (generally) 3D motion of points in the scene (typically on surfaces of objects). To the each point is assigned a velocity vector corresponding to the motion direction and velocity magnitude. 7

8 Motion field Examle: 8

9 Estimating motion field 1. Matching of blocks. 2. Matching of objects. Interpretation needed. A sparse motion field. 3. Matching of interest points. A bit denser motion field. A more difficult interpretation. Problems with repetitive structures. 4. Optic flow, a differential technique matching intensities on a pixellevel, exploring spatial and time variations. Ideally, a dense motion field. Problems for textureless parts of images due to aperture problem (to be explained). 9

10 Segmentation in Videosequences Background Subtraction first must be defined a model of the background this background model is compared against the current image and then the known background parts are subtracted away. The objects left after subtraction are presumably new foreground objects.


11 Establishing a Reference Images Establishing a Reference Images: Difference will erase static object: When a dynamic object move out completely from its position, the back ground in replaced. 11

12 Object tracking Object tracking is the problem of determining (estimating) the positions and other relevant information of moving objects in image sequences. Two-frame tracking can be accomplished using: correlation-based matching methods feature-based methods optical flow techniques change-based moving object detection methods 12

13 Main difficulties in reliable tracking of moving objects Rapid appearance changes caused by image noise, illumination changes, non-rigid motion,... Non-stable background Interaction between multiple multiple objects... 13

14 Block matching method Correlation-based tracking is BM method For a given region in one frame, find the corresponding region in the next frame by finding the maximum correlation score (or other block matching criteria) in a search region Blocks are typically squared and overlapped 14
 in a search region Blocks are typically squared and")
15 Block matching method 15

16 Visible Motion and True Motion Generally, optical flow corresponds to the motion field, but not always. For example, the motion field and optical flow of a rotating barber's pole are different... 16

17 Motion field / Optical flow z unit vector in the axis z direction. f focal length of a lens. vi = d ri d t velocity in the image plane. v=dr d t velocity in the 3D space. Optical flow is a vector field, from which the motion field can be estimated under certain conditions. 17

18 Optical flow OPTIC FLOW = apparent motion of the same (similar) intensity patterns Ideally, the optic flow can approximate projections of the three-dimensional motion (i.e., velocity) vectors onto the image plane. Hence, the optic flow is estimated instead of the motion field (since the latter is unobservable in general). 18

.")
19 Aperture problem By analyzing projected images, we always observe a limited area of visible motion only (defined by aperture of the camera or of the area of influence of the used algorithm for motion analysis). 19
.")

20 Aperture problem -example For example, assume that we either only see the inner rectangles, or the whole three images taken at times t, t + 1, t + 2. For the inner rectangles, we may conclude an upward translation with a minor rotation... 20

21 Aperture problem we are only able to measure the component of optical flow that is in the direction of the intensity gradient. We are unable to measure the component tangential to the intensity gradient. 21
and flow vectors (right) as the camera moves down the hall (original images courtesy of Jean-Yves Bouguet)")
22 Optical flow target features are tracked over time and their movement is converted into velocity vectors (upper right); lower panels show a single image of the hallway (left )and flow vectors (right) as the camera moves down the hall (original images courtesy of Jean-Yves Bouguet) 22
23 Optical flow Common assumption - Brightness constancy: The appearance of the image patches do not change (brightness constancy) I ( pi, t ) = I ( pi + vi, t + 1) A pixel from the image of an object in the scene does not change in appearance as it (possibly) moves from frame to frame. For grayscale images this means we assume that the brightness of a pixel does not change as it is tracked from frame to frame. 23

24 Optical Flow Assumptions: Brightness constancy 24
25 Optical Flow Assumptions: 25
26 Optical Flow Assumptions: Temporal persistence Temporal persistence or small movements. The image motion of a surface patch changes slowly in time. In practice, this means the temporal increments are fast enough relative to the scale of motion in the image that the object does not move much from frame to frame. 26
27 Optical Flow: 1D Case Brightness Constancy Assumption: { f (t ) I ( x (t ), t ) = I ( x (t + dt ), t + dt ) f ( x) = 0 t I x I + x t t t Ix v It v = Ix Because no change in brightness with time = 0 x(t ) It 27
28 Tracking in the 1D case: I ( x, t ) I ( x, t + 1) Temporal derivative It p v x Ix Spatial derivative I Ix = x t I It = t x= p I v t Ix Assumptions: Brightness constancy Small motion 28
29 Tracking in the 1D case: Iterating helps refining the velocity vector I ( x, t ) I ( x, t + 1) Temporal derivative at 2nd iteration It p x Ix Can keep the same estimate for spatial derivative I v v previous t Ix Converges in about 5 iterations 29
30 From 1D to 2D tracking I ( x, y, t + 1) y v2 v1 v I ( x, t ) v3 v4 I ( x, t + 1) x I ( x, y, t ) x The Math is very similar: v G 1b It v Ix I x2 G= window around p I x I y b= IxIy I y2 I x It window around p I y I t 30
31 KLT in Pyramids Problem: we want a large window to catch large motions, but a large window too oft en breaks the coherent motion assumption! To circumvent this problem, we can track first over larger spatial scales using an image pyramid and then refine the initial motion velocity assumptions by working our way down the levels of the image pyramid until we arrive at the raw image pixels. 31
32 KLT in Pyramids First solve optical flow at the top layer and then to use the resulting motion estimates as the starting point for the next layer down. We continue going down the pyramid in this manner until we reach the lowest level. Thus we minimize the violations of our motion assumptions and so can track faster and longer motions. 32
33 Coarse-to-fine optical flow estimation run iterative L-K warp & upsample run iterative L-K... imageij image t-1 Gaussian pyramid of image It-1 image II image Gaussian pyramid of image I
34 Edge large gradients, all the same large λ1, small λ2 34 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
35 Low texture region gradients have small magnitude small λ1, small λ2 35 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
36 High textured region gradients are different, large magnitudes large λ1, large λ2 36 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
37 Local features for tracking...there are many kinds of local features that one can track... If strong derivatives are observed in two orthogonal directions then we can hope that this point is more likely to be unique. => many trackable features are called corners. Intuitively, corners not edges are the points that contain enough information to be picked out from one frame to the next. 37
38 Harris corner detection The definition relies on the matrix of the secondorder derivatives ( 2x, 2 y, x y) of the image intensities. Hessian matrix around a point: Autocorrelation matrix of the second derivative images over a small window around each point: 38
39 Harris corner detection Harris s definition: Corners are places in the image where the autocorrelation matrix of the second derivatives has two large eigenvalues. => there is texture (or edges) going in at least two separate directions these two eigenvalues do more than determine if a point is a good feature to track; they also provide an identifying signature for the point. 39
40 Shi and Tomasi: Good Features to Track Shi and Tomasi: Good corner results as long as the smaller of the two eigenvalues is greater than a minimum threshold. Shi and Tomasi s method was not only sufficient but in many cases gave more satisfactory results than Harris s method. 40
41 Global approach: Horn-Schunck A method for finding the optical flow pattern which assumes that the apparent velocity of the brightness pattern varies smoothly almost everywhere in the image. An iterative implementation computes the optical flow of each pixel. 41
42 Horn-Schunck Algorithm Two criteria: Optical flow is smooth, Fs(u,v) Small error in optical flow constraint equation, Fh(u,v) Minimize a combined error functional Fc(u,v) = Fs(u,v) + λ Fh(u,v) λ is a weighting parameter Variation calculus gives a pair of second order differential equations that can be solved iteratively Computer Vision - Fall 2001Digital Image Processing 42
43 Advantages / Disadvantages of the Horn Schunck algorithm Advantages : it yields a high density of flow vectors, i.e. the flow information missing in inner parts of homogeneous objects is filled in from the motion boundaries. Disadvantages: it is more sensitive to noise than local methods. The Horn-Schunck method is very unstable in case of illumination artifacts in image sequences (due to the assumed brightness constancy). 43
44 Mean-Shift Tracking Mean-Shift in tracking task: track the motion of a cluster of interesting features. 1. choose the feature distribution to represent an object (e.g., color + texture), 2. start the mean-shift window over the feature distribution generated by the object 3. finally compute the chosen feature distribution over the next video frame. Computer Vision - Fall 2001Digital Image Processing 44
45 Mean-Shift Tracking Starting from the current window location, the mean-shift algorithm will find the new peak or mode of the feature distribution, which (presumably) is centered over the object that produced the color and texture in the fi rst place. => In this way, the mean-shift window tracks the movement of the object frame by frame. Computer Vision - Fall 2001Digital Image Processing 45
46 Mean-shift algorithm in action An initial window is placed over a twodimensional array of data points and is successively recentered over the mode (or local peak) of its data distribution until convergence Computer Vision - Fall 2001Digital Image Processing 46
47 Mean-shift algorithm The mean-shift algorithm runs as follows: 1. Choose a search window: its initial location; its type (uniform, polynomial, exponential, or Gaussian); its shape (symmetric or skewed, possibly rotated, rounded or rectangular); its size (extent at which it rolls off or is cut off ). 2. Compute the window s (possibly weighted) center of mass. 3. Center the window at the center of mass. 4. Return to step 2Computer until the window stops moving (it always Vision - Fall 2001Digital will).* Image Processing 47
48 Camshift - continuously adaptive mean-shift It differs from the meanshift in that the search window adjusts itself in size. Computer Vision - Fall 2001Digital Image Processing 48
 of an object.")
49 Motion Templates Track general movement and are especially applicable to gesture recognition. Gradient method Using motion templates requires a silhouette (or part of a silhouette) of an object. Computer Vision - Fall 2001Digital Image Processing 49
50 Motion Templates Object silhouettes: Object silhouettes can be obtained in a number of ways: 1. use a reasonably stationary camera and then employ frame-to-frame differencing. Th is will give you the moving edges of objects, which is enough to make motion templates work. 2. You can use chroma keying. For example, if you have a known background, you can simply take as foreground anything that is not background. Computer Vision - Fall 2001Digital Image Processing 50
51 Motion Templates Object silhouettes: To learn a background model from which you can isolate new foreground objects/people as silhouettes. 1. You can use active silhouetting techniques for example, creating a wall of nearinfrared light and having a near-infrared-sensitive camera look at the wall. Any intervening object will show up as a silhouette. 2. You can use thermal images; then any hot object (such as a face) can be taken as foreground. 3. Finally, you can generate silhouettes by using the segmentation techniques... Computer Vision - Fall 2001Digital Image Processing 51

52 Tracking Cars Using Optical Flow Results -Mathworks The model uses an optical flow estimation technique to estimate the motion vectors in each frame of the video sequence. By thresholding and performing morphological closing on the motion vectors, the model produces binary feature images. The model locates the cars in each binary feature image using the Blob Analysis block. 52
53 Change-based blob tracking Algorithm Calculate the background Image subtraction to detection motion blobs Compute the difference image between two frames Thresholding to find the blobs Locate the blob center as the position of the object 53
54 Estimation - Prediction In a long image sequence, if the dynamics of the moving object is known, prediction can be made about the positions of the objects in the current image. This information can be combined with the actual image observation to achieve more robust results 54
55 Prediction System 55
56 Model of system Model of system 56
57 Tracking formulated using the Hidden Markov model (HMM) Hidden Markov model (HMM): 57
58 Tracking formulated using the Hidden Markov model The state xk usually consists of the position, the velocity, the acceleration, and other features of the object The observation zk is usually the video frame at current time instance. The transition probability is modeled using dynamic model such as constant velocity model, or constant acceleration model Example: A constant velocity dynamic model 58
59 The dynamic system 59
.")
60 The dynamic system general problem of trying to estimate the state x of a discrete-time controlled process is governed by the linear stochastic difference equation with a measurement z that is: The random variables wk and vk represent the process and measurement noise (respectively). They are assumed to be independent (of each other), white, and with normal probability distributions In practice, the process noise covariance Q and measurement noise covariance R matrices might change with each time step or measurement, however here we assume they are constant. 60
61 Kalman filter The Kalman filter is a set of mathematical equations that provides an efficient computational (recursive) means to estimate the state of a process, in a way that minimizes the mean of the squared error. 61
62 Kalman filter Two groups of the equations for the Kalman filter: time update equations and measurement update equations. The time update equations are responsible for projecting forward (in time) the current state and error covariance estimates to obtain the a priori estimates for the next time step. The measurement update equations are responsible for the feedback i.e. for incorporating a new measurement into the a priori estimate to obtain an improved a posteriori estimate. 62
63 Kalman filter the time update equations can also be thought of as predictor equations the measurement update equations can be thought of as corrector equations. predictor-corrector algorithm => solving numerical problems: Discrete Kalman filter time update equations: Discrete Kalman filter measurement update equations: time update equations project the state and covariance estimates forward from time step k-1 to step k. 63
Feature Tracking and Optical Flow
 02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow
 , pp.233-237 http://dx.doi.org/10.14257/astl.2014.51.53 A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow Giwoo Kim 1, Hye-Youn Lim 1 and Dae-Seong Kang 1, 1 Department of electronices
, pp.233-237 http://dx.doi.org/10.14257/astl.2014.51.53 A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow Giwoo Kim 1, Hye-Youn Lim 1 and Dae-Seong Kang 1, 1 Department of electronices
Vision based Vehicle Tracking using a high angle camera
 Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu [email protected] [email protected] Abstract A vehicle tracking and grouping algorithm is presented in this work
Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu [email protected] [email protected] Abstract A vehicle tracking and grouping algorithm is presented in this work
Optical Flow. Shenlong Wang CSC2541 Course Presentation Feb 2, 2016
 Optical Flow Shenlong Wang CSC2541 Course Presentation Feb 2, 2016 Outline Introduction Variation Models Feature Matching Methods End-to-end Learning based Methods Discussion Optical Flow Goal: Pixel motion
Optical Flow Shenlong Wang CSC2541 Course Presentation Feb 2, 2016 Outline Introduction Variation Models Feature Matching Methods End-to-end Learning based Methods Discussion Optical Flow Goal: Pixel motion
Practical Tour of Visual tracking. David Fleet and Allan Jepson January, 2006
 Practical Tour of Visual tracking David Fleet and Allan Jepson January, 2006 Designing a Visual Tracker: What is the state? pose and motion (position, velocity, acceleration, ) shape (size, deformation,
Practical Tour of Visual tracking David Fleet and Allan Jepson January, 2006 Designing a Visual Tracker: What is the state? pose and motion (position, velocity, acceleration, ) shape (size, deformation,
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER
 ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
Mean-Shift Tracking with Random Sampling
 1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
A Reliability Point and Kalman Filter-based Vehicle Tracking Technique
 A Reliability Point and Kalman Filter-based Vehicle Tracing Technique Soo Siang Teoh and Thomas Bräunl Abstract This paper introduces a technique for tracing the movement of vehicles in consecutive video
A Reliability Point and Kalman Filter-based Vehicle Tracing Technique Soo Siang Teoh and Thomas Bräunl Abstract This paper introduces a technique for tracing the movement of vehicles in consecutive video
Segmentation & Clustering
 EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
Tracking in flussi video 3D. Ing. Samuele Salti
 Seminari XXIII ciclo Tracking in flussi video 3D Ing. Tutors: Prof. Tullio Salmon Cinotti Prof. Luigi Di Stefano The Tracking problem Detection Object model, Track initiation, Track termination, Tracking
Seminari XXIII ciclo Tracking in flussi video 3D Ing. Tutors: Prof. Tullio Salmon Cinotti Prof. Luigi Di Stefano The Tracking problem Detection Object model, Track initiation, Track termination, Tracking
System Identification for Acoustic Comms.:
 System Identification for Acoustic Comms.: New Insights and Approaches for Tracking Sparse and Rapidly Fluctuating Channels Weichang Li and James Preisig Woods Hole Oceanographic Institution The demodulation
System Identification for Acoustic Comms.: New Insights and Approaches for Tracking Sparse and Rapidly Fluctuating Channels Weichang Li and James Preisig Woods Hole Oceanographic Institution The demodulation
Understanding and Applying Kalman Filtering
 Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
OBJECT TRACKING USING LOG-POLAR TRANSFORMATION
 OBJECT TRACKING USING LOG-POLAR TRANSFORMATION A Thesis Submitted to the Gradual Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements
OBJECT TRACKING USING LOG-POLAR TRANSFORMATION A Thesis Submitted to the Gradual Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner ([email protected]) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner ([email protected]) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
 Tracking Moving Objects In Video Sequences Yiwei Wang, Robert E. Van Dyck, and John F. Doherty Department of Electrical Engineering The Pennsylvania State University University Park, PA16802 Abstract{Object
Tracking Moving Objects In Video Sequences Yiwei Wang, Robert E. Van Dyck, and John F. Doherty Department of Electrical Engineering The Pennsylvania State University University Park, PA16802 Abstract{Object
A Learning Based Method for Super-Resolution of Low Resolution Images
 A Learning Based Method for Super-Resolution of Low Resolution Images Emre Ugur June 1, 2004 [email protected] Abstract The main objective of this project is the study of a learning based method
A Learning Based Method for Super-Resolution of Low Resolution Images Emre Ugur June 1, 2004 [email protected] Abstract The main objective of this project is the study of a learning based method
A Method of Caption Detection in News Video
 3rd International Conference on Multimedia Technology(ICMT 3) A Method of Caption Detection in News Video He HUANG, Ping SHI Abstract. News video is one of the most important media for people to get information.
3rd International Conference on Multimedia Technology(ICMT 3) A Method of Caption Detection in News Video He HUANG, Ping SHI Abstract. News video is one of the most important media for people to get information.
Tracking of Small Unmanned Aerial Vehicles
 Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: [email protected] Aeronautics and Astronautics Stanford
Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: [email protected] Aeronautics and Astronautics Stanford
EFFICIENT VEHICLE TRACKING AND CLASSIFICATION FOR AN AUTOMATED TRAFFIC SURVEILLANCE SYSTEM
 EFFICIENT VEHICLE TRACKING AND CLASSIFICATION FOR AN AUTOMATED TRAFFIC SURVEILLANCE SYSTEM Amol Ambardekar, Mircea Nicolescu, and George Bebis Department of Computer Science and Engineering University
EFFICIENT VEHICLE TRACKING AND CLASSIFICATION FOR AN AUTOMATED TRAFFIC SURVEILLANCE SYSTEM Amol Ambardekar, Mircea Nicolescu, and George Bebis Department of Computer Science and Engineering University
Edge tracking for motion segmentation and depth ordering
 Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
Real-time Traffic Congestion Detection Based on Video Analysis
 Journal of Information & Computational Science 9: 10 (2012) 2907 2914 Available at http://www.joics.com Real-time Traffic Congestion Detection Based on Video Analysis Shan Hu a,, Jiansheng Wu a, Ling Xu
Journal of Information & Computational Science 9: 10 (2012) 2907 2914 Available at http://www.joics.com Real-time Traffic Congestion Detection Based on Video Analysis Shan Hu a,, Jiansheng Wu a, Ling Xu
Speed Performance Improvement of Vehicle Blob Tracking System
 Speed Performance Improvement of Vehicle Blob Tracking System Sung Chun Lee and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA [email protected], [email protected] Abstract. A speed
Speed Performance Improvement of Vehicle Blob Tracking System Sung Chun Lee and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA [email protected], [email protected] Abstract. A speed
Assessment. Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall
 Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
Automatic parameter regulation for a tracking system with an auto-critical function
 Automatic parameter regulation for a tracking system with an auto-critical function Daniela Hall INRIA Rhône-Alpes, St. Ismier, France Email: [email protected] Abstract In this article we propose
Automatic parameter regulation for a tracking system with an auto-critical function Daniela Hall INRIA Rhône-Alpes, St. Ismier, France Email: [email protected] Abstract In this article we propose
Texture. Chapter 7. 7.1 Introduction
 Chapter 7 Texture 7.1 Introduction Texture plays an important role in many machine vision tasks such as surface inspection, scene classification, and surface orientation and shape determination. For example,
Chapter 7 Texture 7.1 Introduction Texture plays an important role in many machine vision tasks such as surface inspection, scene classification, and surface orientation and shape determination. For example,
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS
 NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK September 2014 Authorized for Distribution by the New York State Education Department This test design and framework document
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK September 2014 Authorized for Distribution by the New York State Education Department This test design and framework document
Introduction to Robotics Analysis, Systems, Applications
 Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
Environmental Remote Sensing GEOG 2021
 Environmental Remote Sensing GEOG 2021 Lecture 4 Image classification 2 Purpose categorising data data abstraction / simplification data interpretation mapping for land cover mapping use land cover class
Environmental Remote Sensing GEOG 2021 Lecture 4 Image classification 2 Purpose categorising data data abstraction / simplification data interpretation mapping for land cover mapping use land cover class
APPLIED MATHEMATICS ADVANCED LEVEL
 APPLIED MATHEMATICS ADVANCED LEVEL INTRODUCTION This syllabus serves to examine candidates knowledge and skills in introductory mathematical and statistical methods, and their applications. For applications
APPLIED MATHEMATICS ADVANCED LEVEL INTRODUCTION This syllabus serves to examine candidates knowledge and skills in introductory mathematical and statistical methods, and their applications. For applications
Advanced Signal Processing and Digital Noise Reduction
 Advanced Signal Processing and Digital Noise Reduction Saeed V. Vaseghi Queen's University of Belfast UK WILEY HTEUBNER A Partnership between John Wiley & Sons and B. G. Teubner Publishers Chichester New
Advanced Signal Processing and Digital Noise Reduction Saeed V. Vaseghi Queen's University of Belfast UK WILEY HTEUBNER A Partnership between John Wiley & Sons and B. G. Teubner Publishers Chichester New
Visualization and Feature Extraction, FLOW Spring School 2016 Prof. Dr. Tino Weinkauf. Flow Visualization. Image-Based Methods (integration-based)
") Visualization and Feature Extraction, FLOW Spring School 2016 Prof. Dr. Tino Weinkauf Flow Visualization Image-Based Methods (integration-based) Spot Noise (Jarke van Wijk, Siggraph 1991) Flow Visualization:
Visualization and Feature Extraction, FLOW Spring School 2016 Prof. Dr. Tino Weinkauf Flow Visualization Image-Based Methods (integration-based) Spot Noise (Jarke van Wijk, Siggraph 1991) Flow Visualization:
A Movement Tracking Management Model with Kalman Filtering Global Optimization Techniques and Mahalanobis Distance
 Loutraki, 21 26 October 2005 A Movement Tracking Management Model with ing Global Optimization Techniques and Raquel Ramos Pinho, João Manuel R. S. Tavares, Miguel Velhote Correia Laboratório de Óptica
Loutraki, 21 26 October 2005 A Movement Tracking Management Model with ing Global Optimization Techniques and Raquel Ramos Pinho, João Manuel R. S. Tavares, Miguel Velhote Correia Laboratório de Óptica
Part-Based Recognition
 Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
VECTORAL IMAGING THE NEW DIRECTION IN AUTOMATED OPTICAL INSPECTION
 VECTORAL IMAGING THE NEW DIRECTION IN AUTOMATED OPTICAL INSPECTION Mark J. Norris Vision Inspection Technology, LLC Haverhill, MA [email protected] ABSTRACT Traditional methods of identifying and
VECTORAL IMAGING THE NEW DIRECTION IN AUTOMATED OPTICAL INSPECTION Mark J. Norris Vision Inspection Technology, LLC Haverhill, MA [email protected] ABSTRACT Traditional methods of identifying and
A Prototype For Eye-Gaze Corrected
 A Prototype For Eye-Gaze Corrected Video Chat on Graphics Hardware Maarten Dumont, Steven Maesen, Sammy Rogmans and Philippe Bekaert Introduction Traditional webcam video chat: No eye contact. No extensive
A Prototype For Eye-Gaze Corrected Video Chat on Graphics Hardware Maarten Dumont, Steven Maesen, Sammy Rogmans and Philippe Bekaert Introduction Traditional webcam video chat: No eye contact. No extensive
Linear Threshold Units
 Linear Threshold Units w x hx (... w n x n w We assume that each feature x j and each weight w j is a real number (we will relax this later) We will study three different algorithms for learning linear
Linear Threshold Units w x hx (... w n x n w We assume that each feature x j and each weight w j is a real number (we will relax this later) We will study three different algorithms for learning linear
Robert Collins CSE598G. More on Mean-shift. R.Collins, CSE, PSU CSE598G Spring 2006
 More on Mean-shift R.Collins, CSE, PSU Spring 2006 Recall: Kernel Density Estimation Given a set of data samples x i ; i=1...n Convolve with a kernel function H to generate a smooth function f(x) Equivalent
More on Mean-shift R.Collins, CSE, PSU Spring 2006 Recall: Kernel Density Estimation Given a set of data samples x i ; i=1...n Convolve with a kernel function H to generate a smooth function f(x) Equivalent
3D Scanner using Line Laser. 1. Introduction. 2. Theory
 . Introduction 3D Scanner using Line Laser Di Lu Electrical, Computer, and Systems Engineering Rensselaer Polytechnic Institute The goal of 3D reconstruction is to recover the 3D properties of a geometric
. Introduction 3D Scanner using Line Laser Di Lu Electrical, Computer, and Systems Engineering Rensselaer Polytechnic Institute The goal of 3D reconstruction is to recover the 3D properties of a geometric
Vehicle Tracking in Occlusion and Clutter
 Vehicle Tracking in Occlusion and Clutter by KURTIS NORMAN MCBRIDE A thesis presented to the University of Waterloo in fulfilment of the thesis requirement for the degree of Master of Applied Science in
Vehicle Tracking in Occlusion and Clutter by KURTIS NORMAN MCBRIDE A thesis presented to the University of Waterloo in fulfilment of the thesis requirement for the degree of Master of Applied Science in
Real-Time Tracking of Pedestrians and Vehicles
 Real-Time Tracking of Pedestrians and Vehicles N.T. Siebel and S.J. Maybank. Computational Vision Group Department of Computer Science The University of Reading Reading RG6 6AY, England Abstract We present
Real-Time Tracking of Pedestrians and Vehicles N.T. Siebel and S.J. Maybank. Computational Vision Group Department of Computer Science The University of Reading Reading RG6 6AY, England Abstract We present
Colour Image Segmentation Technique for Screen Printing
 60 R.U. Hewage and D.U.J. Sonnadara Department of Physics, University of Colombo, Sri Lanka ABSTRACT Screen-printing is an industry with a large number of applications ranging from printing mobile phone
60 R.U. Hewage and D.U.J. Sonnadara Department of Physics, University of Colombo, Sri Lanka ABSTRACT Screen-printing is an industry with a large number of applications ranging from printing mobile phone
Canny Edge Detection
 Canny Edge Detection 09gr820 March 23, 2009 1 Introduction The purpose of edge detection in general is to significantly reduce the amount of data in an image, while preserving the structural properties
Canny Edge Detection 09gr820 March 23, 2009 1 Introduction The purpose of edge detection in general is to significantly reduce the amount of data in an image, while preserving the structural properties
CCNY. BME I5100: Biomedical Signal Processing. Linear Discrimination. Lucas C. Parra Biomedical Engineering Department City College of New York
 BME I5100: Biomedical Signal Processing Linear Discrimination Lucas C. Parra Biomedical Engineering Department CCNY 1 Schedule Week 1: Introduction Linear, stationary, normal - the stuff biology is not
BME I5100: Biomedical Signal Processing Linear Discrimination Lucas C. Parra Biomedical Engineering Department CCNY 1 Schedule Week 1: Introduction Linear, stationary, normal - the stuff biology is not
An Iterative Image Registration Technique with an Application to Stereo Vision
 An Iterative Image Registration Technique with an Application to Stereo Vision Bruce D. Lucas Takeo Kanade Computer Science Department Carnegie-Mellon University Pittsburgh, Pennsylvania 15213 Abstract
An Iterative Image Registration Technique with an Application to Stereo Vision Bruce D. Lucas Takeo Kanade Computer Science Department Carnegie-Mellon University Pittsburgh, Pennsylvania 15213 Abstract
Static Environment Recognition Using Omni-camera from a Moving Vehicle
 Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Object Recognition and Template Matching
 Object Recognition and Template Matching Template Matching A template is a small image (sub-image) The goal is to find occurrences of this template in a larger image That is, you want to find matches of
Object Recognition and Template Matching Template Matching A template is a small image (sub-image) The goal is to find occurrences of this template in a larger image That is, you want to find matches of
Spatio-Temporal Nonparametric Background Modeling and Subtraction
 Spatio-Temporal Nonparametric Background Modeling and Subtraction Raviteja Vemulapalli and R. Aravind Department of Electrical engineering Indian Institute of Technology, Madras Background subtraction
Spatio-Temporal Nonparametric Background Modeling and Subtraction Raviteja Vemulapalli and R. Aravind Department of Electrical engineering Indian Institute of Technology, Madras Background subtraction
Subspace Analysis and Optimization for AAM Based Face Alignment
 Subspace Analysis and Optimization for AAM Based Face Alignment Ming Zhao Chun Chen College of Computer Science Zhejiang University Hangzhou, 310027, P.R.China [email protected] Stan Z. Li Microsoft
Subspace Analysis and Optimization for AAM Based Face Alignment Ming Zhao Chun Chen College of Computer Science Zhejiang University Hangzhou, 310027, P.R.China [email protected] Stan Z. Li Microsoft
Machine vision systems - 2
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Essential Mathematics for Computer Graphics fast
 John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
John Vince Essential Mathematics for Computer Graphics fast Springer Contents 1. MATHEMATICS 1 Is mathematics difficult? 3 Who should read this book? 4 Aims and objectives of this book 4 Assumptions made
BCC Multi Stripe Wipe
 BCC Multi Stripe Wipe The BCC Multi Stripe Wipe is a similar to a Horizontal or Vertical Blind wipe. It offers extensive controls to randomize the stripes parameters. The following example shows a Multi
BCC Multi Stripe Wipe The BCC Multi Stripe Wipe is a similar to a Horizontal or Vertical Blind wipe. It offers extensive controls to randomize the stripes parameters. The following example shows a Multi
Enhanced LIC Pencil Filter
 Enhanced LIC Pencil Filter Shigefumi Yamamoto, Xiaoyang Mao, Kenji Tanii, Atsumi Imamiya University of Yamanashi {[email protected], [email protected], [email protected]}
Enhanced LIC Pencil Filter Shigefumi Yamamoto, Xiaoyang Mao, Kenji Tanii, Atsumi Imamiya University of Yamanashi {[email protected], [email protected], [email protected]}
Object Tracking System Using Approximate Median Filter, Kalman Filter and Dynamic Template Matching
 I.J. Intelligent Systems and Applications, 2014, 05, 83-89 Published Online April 2014 in MECS (http://www.mecs-press.org/) DOI: 10.5815/ijisa.2014.05.09 Object Tracking System Using Approximate Median
I.J. Intelligent Systems and Applications, 2014, 05, 83-89 Published Online April 2014 in MECS (http://www.mecs-press.org/) DOI: 10.5815/ijisa.2014.05.09 Object Tracking System Using Approximate Median
Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Sample Exam Questions 2007
 Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Questions 2007 INSTRUCTIONS: Answer all questions. Spend approximately 1 minute per mark. Question 1 30 Marks Total
Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Questions 2007 INSTRUCTIONS: Answer all questions. Spend approximately 1 minute per mark. Question 1 30 Marks Total
INTRODUCTION TO RENDERING TECHNIQUES
 INTRODUCTION TO RENDERING TECHNIQUES 22 Mar. 212 Yanir Kleiman What is 3D Graphics? Why 3D? Draw one frame at a time Model only once X 24 frames per second Color / texture only once 15, frames for a feature
INTRODUCTION TO RENDERING TECHNIQUES 22 Mar. 212 Yanir Kleiman What is 3D Graphics? Why 3D? Draw one frame at a time Model only once X 24 frames per second Color / texture only once 15, frames for a feature
Probability and Random Variables. Generation of random variables (r.v.)
") Probability and Random Variables Method for generating random variables with a specified probability distribution function. Gaussian And Markov Processes Characterization of Stationary Random Process Linearly
Probability and Random Variables Method for generating random variables with a specified probability distribution function. Gaussian And Markov Processes Characterization of Stationary Random Process Linearly
3D Interactive Information Visualization: Guidelines from experience and analysis of applications
 3D Interactive Information Visualization: Guidelines from experience and analysis of applications Richard Brath Visible Decisions Inc., 200 Front St. W. #2203, Toronto, Canada, [email protected] 1. EXPERT
3D Interactive Information Visualization: Guidelines from experience and analysis of applications Richard Brath Visible Decisions Inc., 200 Front St. W. #2203, Toronto, Canada, [email protected] 1. EXPERT
Time Domain and Frequency Domain Techniques For Multi Shaker Time Waveform Replication
 Time Domain and Frequency Domain Techniques For Multi Shaker Time Waveform Replication Thomas Reilly Data Physics Corporation 1741 Technology Drive, Suite 260 San Jose, CA 95110 (408) 216-8440 This paper
Time Domain and Frequency Domain Techniques For Multi Shaker Time Waveform Replication Thomas Reilly Data Physics Corporation 1741 Technology Drive, Suite 260 San Jose, CA 95110 (408) 216-8440 This paper
Demo: Real-time Tracking of Round Object
 Page 1 of 1 Demo: Real-time Tracking of Round Object by: Brianna Bikker and David Price, TAMU Course Instructor: Professor Deepa Kundur Introduction Our project is intended to track the motion of a round
Page 1 of 1 Demo: Real-time Tracking of Round Object by: Brianna Bikker and David Price, TAMU Course Instructor: Professor Deepa Kundur Introduction Our project is intended to track the motion of a round
Big Ideas in Mathematics
 Big Ideas in Mathematics which are important to all mathematics learning. (Adapted from the NCTM Curriculum Focal Points, 2006) The Mathematics Big Ideas are organized using the PA Mathematics Standards
Big Ideas in Mathematics which are important to all mathematics learning. (Adapted from the NCTM Curriculum Focal Points, 2006) The Mathematics Big Ideas are organized using the PA Mathematics Standards
Real-time pedestrian detection in FIR and grayscale images
 Real-time pedestrian detection in FIR and grayscale images Dissertation zur Erlangung des Grades eines Doktor-Ingenieurs(Dr.-Ing.) an der Fakultät für Elektrotechnik und Informationstechnik der Ruhr-Universität
Real-time pedestrian detection in FIR and grayscale images Dissertation zur Erlangung des Grades eines Doktor-Ingenieurs(Dr.-Ing.) an der Fakultät für Elektrotechnik und Informationstechnik der Ruhr-Universität
Computational Optical Imaging - Optique Numerique. -- Deconvolution --
 Computational Optical Imaging - Optique Numerique -- Deconvolution -- Winter 2014 Ivo Ihrke Deconvolution Ivo Ihrke Outline Deconvolution Theory example 1D deconvolution Fourier method Algebraic method
Computational Optical Imaging - Optique Numerique -- Deconvolution -- Winter 2014 Ivo Ihrke Deconvolution Ivo Ihrke Outline Deconvolution Theory example 1D deconvolution Fourier method Algebraic method
In order to describe motion you need to describe the following properties.
 Chapter 2 One Dimensional Kinematics How would you describe the following motion? Ex: random 1-D path speeding up and slowing down In order to describe motion you need to describe the following properties.
Chapter 2 One Dimensional Kinematics How would you describe the following motion? Ex: random 1-D path speeding up and slowing down In order to describe motion you need to describe the following properties.
Algebra 1 2008. Academic Content Standards Grade Eight and Grade Nine Ohio. Grade Eight. Number, Number Sense and Operations Standard
 Academic Content Standards Grade Eight and Grade Nine Ohio Algebra 1 2008 Grade Eight STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express
Academic Content Standards Grade Eight and Grade Nine Ohio Algebra 1 2008 Grade Eight STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express
Current Standard: Mathematical Concepts and Applications Shape, Space, and Measurement- Primary
 Shape, Space, and Measurement- Primary A student shall apply concepts of shape, space, and measurement to solve problems involving two- and three-dimensional shapes by demonstrating an understanding of:
Shape, Space, and Measurement- Primary A student shall apply concepts of shape, space, and measurement to solve problems involving two- and three-dimensional shapes by demonstrating an understanding of:
An Overview of the Finite Element Analysis
 CHAPTER 1 An Overview of the Finite Element Analysis 1.1 Introduction Finite element analysis (FEA) involves solution of engineering problems using computers. Engineering structures that have complex geometry
CHAPTER 1 An Overview of the Finite Element Analysis 1.1 Introduction Finite element analysis (FEA) involves solution of engineering problems using computers. Engineering structures that have complex geometry
3D Vehicle Extraction and Tracking from Multiple Viewpoints for Traffic Monitoring by using Probability Fusion Map
 Electronic Letters on Computer Vision and Image Analysis 7(2):110-119, 2008 3D Vehicle Extraction and Tracking from Multiple Viewpoints for Traffic Monitoring by using Probability Fusion Map Zhencheng
Electronic Letters on Computer Vision and Image Analysis 7(2):110-119, 2008 3D Vehicle Extraction and Tracking from Multiple Viewpoints for Traffic Monitoring by using Probability Fusion Map Zhencheng
Two-Frame Motion Estimation Based on Polynomial Expansion
 Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden [email protected] http://www.isy.liu.se/cvl/ Abstract.
Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden [email protected] http://www.isy.liu.se/cvl/ Abstract.
Rafael Martín & José M. Martínez
 A semi-supervised system for players detection and tracking in multi-camera soccer videos Rafael Martín José M. Martínez Multimedia Tools and Applications An International Journal ISSN 1380-7501 DOI 10.1007/s11042-013-1659-6
A semi-supervised system for players detection and tracking in multi-camera soccer videos Rafael Martín José M. Martínez Multimedia Tools and Applications An International Journal ISSN 1380-7501 DOI 10.1007/s11042-013-1659-6
WHITE PAPER. Methods for Measuring Flat Panel Display Defects and Mura as Correlated to Human Visual Perception
 Methods for Measuring Flat Panel Display Defects and Mura as Correlated to Human Visual Perception Methods for Measuring Flat Panel Display Defects and Mura as Correlated to Human Visual Perception Abstract
Methods for Measuring Flat Panel Display Defects and Mura as Correlated to Human Visual Perception Methods for Measuring Flat Panel Display Defects and Mura as Correlated to Human Visual Perception Abstract
Introduction to Computer Graphics
 Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 [email protected] www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 [email protected] www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Course 8. An Introduction to the Kalman Filter
 Course 8 An Introduction to the Kalman Filter Speakers Greg Welch Gary Bishop Kalman Filters in 2 hours? Hah! No magic. Pretty simple to apply. Tolerant of abuse. Notes are a standalone reference. These
Course 8 An Introduction to the Kalman Filter Speakers Greg Welch Gary Bishop Kalman Filters in 2 hours? Hah! No magic. Pretty simple to apply. Tolerant of abuse. Notes are a standalone reference. These
Object Tracking for Laparoscopic Surgery Using the Adaptive Mean-Shift Kalman Algorithm
 Object Tracking for Laparoscopic Surgery Using the Adaptive Mean-Shift Kalman Algorithm Vera Sa-Ing, Saowapak S. Thongvigitmanee, Chumpon Wilasrusmee, and Jackrit Suthakorn Abstract In this paper, we propose
Object Tracking for Laparoscopic Surgery Using the Adaptive Mean-Shift Kalman Algorithm Vera Sa-Ing, Saowapak S. Thongvigitmanee, Chumpon Wilasrusmee, and Jackrit Suthakorn Abstract In this paper, we propose
FLEXSYS Motion-based Traffic Analysis and Incident Detection
 FLEXSYS Motion-based Traffic Analysis and Incident Detection Authors: Lixin Yang and Hichem Sahli, IBBT/VUB-ETRO Contents.1 Introduction......................................... 1.2 Traffic flow modelling
FLEXSYS Motion-based Traffic Analysis and Incident Detection Authors: Lixin Yang and Hichem Sahli, IBBT/VUB-ETRO Contents.1 Introduction......................................... 1.2 Traffic flow modelling
Fall detection in the elderly by head tracking
 Loughborough University Institutional Repository Fall detection in the elderly by head tracking This item was submitted to Loughborough University's Institutional Repository by the/an author. Citation:
Loughborough University Institutional Repository Fall detection in the elderly by head tracking This item was submitted to Loughborough University's Institutional Repository by the/an author. Citation:
MOTION DETECTION FOR PC BASED SECURITY SYSTEM BY USING OPTICAL FLOW NUR NABILAH BT MOHAMAD HAMID
 MOTION DETECTION FOR PC BASED SECURITY SYSTEM BY USING OPTICAL FLOW NUR NABILAH BT MOHAMAD HAMID This thesis is submitted as partial fulfillment of the requirement for the award of the Bachelor of Electrical
MOTION DETECTION FOR PC BASED SECURITY SYSTEM BY USING OPTICAL FLOW NUR NABILAH BT MOHAMAD HAMID This thesis is submitted as partial fulfillment of the requirement for the award of the Bachelor of Electrical
Automatic Restoration Algorithms for 35mm film
 P. Schallauer, A. Pinz, W. Haas. Automatic Restoration Algorithms for 35mm film. To be published in Videre, Journal of Computer Vision Research, web: http://mitpress.mit.edu/videre.html, 1999. Automatic
P. Schallauer, A. Pinz, W. Haas. Automatic Restoration Algorithms for 35mm film. To be published in Videre, Journal of Computer Vision Research, web: http://mitpress.mit.edu/videre.html, 1999. Automatic
Simultaneous Gamma Correction and Registration in the Frequency Domain
 Simultaneous Gamma Correction and Registration in the Frequency Domain Alexander Wong [email protected] William Bishop [email protected] Department of Electrical and Computer Engineering University
Simultaneous Gamma Correction and Registration in the Frequency Domain Alexander Wong [email protected] William Bishop [email protected] Department of Electrical and Computer Engineering University
CCTV - Video Analytics for Traffic Management
 CCTV - Video Analytics for Traffic Management Index Purpose Description Relevance for Large Scale Events Technologies Impacts Integration potential Implementation Best Cases and Examples 1 of 12 Purpose
CCTV - Video Analytics for Traffic Management Index Purpose Description Relevance for Large Scale Events Technologies Impacts Integration potential Implementation Best Cases and Examples 1 of 12 Purpose
AN INTRODUCTION TO NUMERICAL METHODS AND ANALYSIS
 AN INTRODUCTION TO NUMERICAL METHODS AND ANALYSIS Revised Edition James Epperson Mathematical Reviews BICENTENNIAL 0, 1 8 0 7 z ewiley wu 2007 r71 BICENTENNIAL WILEY-INTERSCIENCE A John Wiley & Sons, Inc.,
AN INTRODUCTION TO NUMERICAL METHODS AND ANALYSIS Revised Edition James Epperson Mathematical Reviews BICENTENNIAL 0, 1 8 0 7 z ewiley wu 2007 r71 BICENTENNIAL WILEY-INTERSCIENCE A John Wiley & Sons, Inc.,
CS 534: Computer Vision 3D Model-based recognition
 CS 534: Computer Vision 3D Model-based recognition Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 High Level Vision Object Recognition: What it means? Two main recognition tasks:!
CS 534: Computer Vision 3D Model-based recognition Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 High Level Vision Object Recognition: What it means? Two main recognition tasks:!
Blind Deconvolution of Barcodes via Dictionary Analysis and Wiener Filter of Barcode Subsections
 Blind Deconvolution of Barcodes via Dictionary Analysis and Wiener Filter of Barcode Subsections Maximilian Hung, Bohyun B. Kim, Xiling Zhang August 17, 2013 Abstract While current systems already provide
Blind Deconvolution of Barcodes via Dictionary Analysis and Wiener Filter of Barcode Subsections Maximilian Hung, Bohyun B. Kim, Xiling Zhang August 17, 2013 Abstract While current systems already provide
Introduction to MATLAB IAP 2008
 MIT OpenCourseWare http://ocw.mit.edu Introduction to MATLAB IAP 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Introduction to Matlab Ideas for
MIT OpenCourseWare http://ocw.mit.edu Introduction to MATLAB IAP 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Introduction to Matlab Ideas for
Template-based Eye and Mouth Detection for 3D Video Conferencing
 Template-based Eye and Mouth Detection for 3D Video Conferencing Jürgen Rurainsky and Peter Eisert Fraunhofer Institute for Telecommunications - Heinrich-Hertz-Institute, Image Processing Department, Einsteinufer
Template-based Eye and Mouth Detection for 3D Video Conferencing Jürgen Rurainsky and Peter Eisert Fraunhofer Institute for Telecommunications - Heinrich-Hertz-Institute, Image Processing Department, Einsteinufer
LIST OF CONTENTS CHAPTER CONTENT PAGE DECLARATION DEDICATION ACKNOWLEDGEMENTS ABSTRACT ABSTRAK
 vii LIST OF CONTENTS CHAPTER CONTENT PAGE DECLARATION DEDICATION ACKNOWLEDGEMENTS ABSTRACT ABSTRAK LIST OF CONTENTS LIST OF TABLES LIST OF FIGURES LIST OF NOTATIONS LIST OF ABBREVIATIONS LIST OF APPENDICES
vii LIST OF CONTENTS CHAPTER CONTENT PAGE DECLARATION DEDICATION ACKNOWLEDGEMENTS ABSTRACT ABSTRAK LIST OF CONTENTS LIST OF TABLES LIST OF FIGURES LIST OF NOTATIONS LIST OF ABBREVIATIONS LIST OF APPENDICES
Matt Cabot Rory Taca QR CODES
 Matt Cabot Rory Taca QR CODES QR codes were designed to assist in the manufacturing plants of the automotive industry. These easy to scan codes allowed for a rapid way to identify parts and made the entire
Matt Cabot Rory Taca QR CODES QR codes were designed to assist in the manufacturing plants of the automotive industry. These easy to scan codes allowed for a rapid way to identify parts and made the entire
Applications to Data Smoothing and Image Processing I
 Applications to Data Smoothing and Image Processing I MA 348 Kurt Bryan Signals and Images Let t denote time and consider a signal a(t) on some time interval, say t. We ll assume that the signal a(t) is
Applications to Data Smoothing and Image Processing I MA 348 Kurt Bryan Signals and Images Let t denote time and consider a signal a(t) on some time interval, say t. We ll assume that the signal a(t) is
EECS 556 Image Processing W 09. Interpolation. Interpolation techniques B splines
 EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 4: LINEAR MODELS FOR CLASSIFICATION
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 4: LINEAR MODELS FOR CLASSIFICATION Introduction In the previous chapter, we explored a class of regression models having particularly simple analytical
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 4: LINEAR MODELS FOR CLASSIFICATION Introduction In the previous chapter, we explored a class of regression models having particularly simple analytical
Latest Results on High-Resolution Reconstruction from Video Sequences
 Latest Results on High-Resolution Reconstruction from Video Sequences S. Lertrattanapanich and N. K. Bose The Spatial and Temporal Signal Processing Center Department of Electrical Engineering The Pennsylvania
Latest Results on High-Resolution Reconstruction from Video Sequences S. Lertrattanapanich and N. K. Bose The Spatial and Temporal Signal Processing Center Department of Electrical Engineering The Pennsylvania
Example: Credit card default, we may be more interested in predicting the probabilty of a default than classifying individuals as default or not.
 Statistical Learning: Chapter 4 Classification 4.1 Introduction Supervised learning with a categorical (Qualitative) response Notation: - Feature vector X, - qualitative response Y, taking values in C
Statistical Learning: Chapter 4 Classification 4.1 Introduction Supervised learning with a categorical (Qualitative) response Notation: - Feature vector X, - qualitative response Y, taking values in C
Real-time Visual Tracker by Stream Processing
 Real-time Visual Tracker by Stream Processing Simultaneous and Fast 3D Tracking of Multiple Faces in Video Sequences by Using a Particle Filter Oscar Mateo Lozano & Kuzahiro Otsuka presented by Piotr Rudol
Real-time Visual Tracker by Stream Processing Simultaneous and Fast 3D Tracking of Multiple Faces in Video Sequences by Using a Particle Filter Oscar Mateo Lozano & Kuzahiro Otsuka presented by Piotr Rudol
The Scientific Data Mining Process
 Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
False alarm in outdoor environments
 Accepted 1.0 Savantic letter 1(6) False alarm in outdoor environments Accepted 1.0 Savantic letter 2(6) Table of contents Revision history 3 References 3 1 Introduction 4 2 Pre-processing 4 3 Detection,
Accepted 1.0 Savantic letter 1(6) False alarm in outdoor environments Accepted 1.0 Savantic letter 2(6) Table of contents Revision history 3 References 3 1 Introduction 4 2 Pre-processing 4 3 Detection,
Introduction to Matrix Algebra
 Psychology 7291: Multivariate Statistics (Carey) 8/27/98 Matrix Algebra - 1 Introduction to Matrix Algebra Definitions: A matrix is a collection of numbers ordered by rows and columns. It is customary
Psychology 7291: Multivariate Statistics (Carey) 8/27/98 Matrix Algebra - 1 Introduction to Matrix Algebra Definitions: A matrix is a collection of numbers ordered by rows and columns. It is customary
Silverlight for Windows Embedded Graphics and Rendering Pipeline 1
 Silverlight for Windows Embedded Graphics and Rendering Pipeline 1 Silverlight for Windows Embedded Graphics and Rendering Pipeline Windows Embedded Compact 7 Technical Article Writers: David Franklin,
Silverlight for Windows Embedded Graphics and Rendering Pipeline 1 Silverlight for Windows Embedded Graphics and Rendering Pipeline Windows Embedded Compact 7 Technical Article Writers: David Franklin,