HIMA - project update: Human detection. Sensor Technologies for Autonomous Work Machines Jukka Laitinen VTT Technical Research Centre of Finland
|
|
|
- Allison Gordon
- 8 years ago
- Views:
Transcription
1 HIMA - project update: Human detection Sensor Technologies for Autonomous Work Machines Jukka Laitinen VTT Technical Research Centre of Finland

2 2 Topics HIMA - review Camera systems Radars (Juhana Ahtiainen) Laserscanners Algorithms Proximity detection (Jari Saarinen)

3 3 HIMA Objectives were: 1. Detection of humans in workmachine (working)area 2. Environment perception so that workmachine can safely move and carry out a work cycle Detection was done with sensor combination of multiple (different wavelengths) cameras and (automotive) radar Requirements for conditions of use were: Max speed for vehicle 60 km/h, temperature >100 C, detection area (stationary vehicle) <70 m, all-kinds of clothing possible

4 4 HIMA Four different use cases: Detection of humans with moving vehicle Detection of humans with stationary vehicle Detection of obstacles with moving vehicle Detection of obstacles with stationary vehicle Alue, jossa ihmisen tai esteen läsnäolo pystytään havaitsemaan Työkone Alue, jossa ihminen tai este pystytään paikantamaan. Työkone Liikesuunta. Alue, jossa ihmisen tai esteen läsnäolo pystytään havaitsemaan.

5 5 HIMA Used sensors: HDR camera (Gevilux Cam 3L) FIR camera (FLIR Photon 320) Stereo camera (Point Grey Bumblebee2) Wideangle stereo (Sony cameras with Fujinon optics) Radar (Bosch LRR2-LGU) Doppler radars (MDU1100T and HR-12)
 Radar (Bosch LRR2-LGU) Doppler radars (MDU1100T")
6 6 HIMA Data fusion was done in 3D Distance information was needed With (single) cameras distance information was modelled with ambiquity Overall applicability to fusion: Stereocameras worked well FIR camera worked well when it was combined with other sensors HDR camera had some difficulties Radar gave accurate distance information but was unable to classify objects Doppler radar results were poor in this case

7 7 HIMA Test sets were collected from two different environments Vuosaari port and Otaniemi testcave In Vuosaari the best sensor combination was radar, stereocamera and FIR camera Detection rate was 95,0% with false detections of 0,1 / second Both the distance information and the classification were duplex With addition of HRD camera the detection rate was same Combination of FIR and radar the detection rate was 84,0% but with lower false detection rate (0,04 / second) In Otaniemi testcave the best sensor combination was FIR with stereocamera Detection rate was 96,6% with false detetions of 0,28 / second Radar got too many reflections which decreased it s performance

8 8 HIMA Data fusion improved the detection rate It was also possible to predict the position of earlier detected human (if it disappeared) Conclusions of data fusion were: Fusion module needed accurate distance information Own movement affected to position measurements and visibility time of objects Synchronization of sensors (time labels) and calibration of coordinate systems were very important
 and calibration of coordinate systems were very")
9 9 HIMA Sensors were divided to two groups 1. Early (detection/warning) sensors Radar, fast detection, lots of targets, no classification 2. Classifiying sensors Cameras, slow detection, object classification Multiple sensors complement each other System duplication (i.e. radar + stereo + FIR) Preprocessing (images are processed based on radar information) Sensor independent data fusion Difficulties: Cameras: high contrast situations, characters, symbols, images/posters, unexpected thermal differences (FIR) Radar: large obstacles near human

10 10 HIMA It was suggested that first pedestrian recognition systems should be driver assistant systems (not fully autonomous) Restricted area of operation would ease the job First target should be safety level of SIL1 and after that SIL2

11 11 Cameras on the market Automotive industry NIR/FIR cameras on some luxury models (with pedestrian detection), both active and passive Daimler, Toyota, Audi, BMW (Autoliv) -> driver assistance systems TOF cameras Blaxtair Mobileye C2-270
 -> driver assistance systems TOF cameras Blaxtair")
12 12 TOF cameras Typically sensor pixel array is 160x120 Typical range up to 10 m Connection USB2, Ethernet Many suppliers: Panasonic - D-Imager (indoor) SoftKinectic DepthSense (depth + colour image, indoor) Fotonic - many models (outdoor, Laser) MESA Imaging SwissRanger PMD Technologies CamCube3
 MESA Imaging SwissRanger PMD Technologies")
13 13 Blaxtair Stereo camera system for pedestrian detection which is aimed for mobile industrial machinery Detects pedestrians within a range of 0 to 14 metres around the machines depending on the settings. Min/max (m) detection: 5/15, 1.5/6, 0.8/4 Alerts the driver and pedestrian of any risk of collision. Effective day and night, it is built to withstand harsh conditions (construction sites, mines, etc.). More information from the website:
.")
14 14 Mobileye C2-270 One camera system which has different on-board applications: Daylight Pedestrian Collision Warning, including Bicycle Detection Forward Collision Warning, both in Highway and Urban areas, including Motorcycle Detection Lane Departure Warning Headway Monitoring and Warning Intelligent High-Beam Control Mobileye system is used in Volvo S60 and V60 for pedestrian detection (combined with radar)

15 15 HDR cameras Modern HDR cameras cover the VS+NIR spectrum Promising technology at the moment is stereo cameras with HDR technology OmniVision Many different models, i.e. sensor OV10630 up to 1280x800 pixels, dynamic range up to 115 db, 30 fps

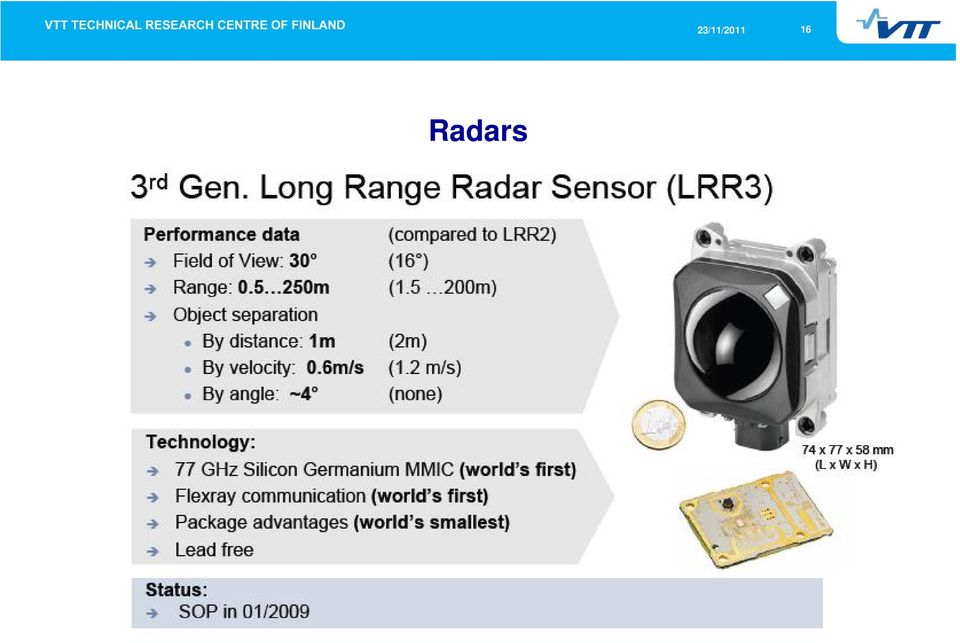
16 16 Radars
17 17 Ultra-wide band (UWB) radars Radars Not a new technique but new applications Adverse weather Object detection in vegetation Through-the-wall irobot DareDevil Xaver 800

18 18 Laserscanners Sick LMS5xx series Detection up to 65 meters, response time 10 ms 5-echo technology

19 19 Laserscanners Sick LD-MRS (same as IBEO Lux) Multi-layer, multi-echo technology Velodyne HDL-32E / HDL-64E 40 vertical field of view 32 lasers are aligned from +10 to -30 vertical field of view Rotating head design delivers a 360 horizontal field of view Generates a point cloud of 700,000 points per second with a range of 100 meters and typical accuracy of +/- 2cm Prize range $ Velodyne HDL-32E

20 20 Sensor fusion Radar/LIDAR detections define Region of interest in camera images Automotive applications Estimation / Filtering Bayesian inference Multi-target tracking Social behavior

21 21 Sensor fusion Publications (or information) for different sensor combinations: Laser + FIR (Kalman filter) 1D laser scanner + VIS Radar + velocity + steering sensor + VIS/FIR Radar + thermopile, steering angle, ambient temperature sensor VIS + FIR stereo Radar + VIS + FIR
22 22 Algorithms Preprocessing Camera calibration Foreground segmentation the promising algorithms in foreground segmentation are the road based ones the presence of the stereo information for this task is mandatory for any future system Classification (simplified) HOG + SVM most promising one mostly focused on gradient-based features and several typical learning algorithms multiclass/multipart approaches are also gaining importance
23 23 Algorithms Tracking Kalman filter is the most used one More work is needed here Data fusion Ideal combination of sensors must be clarified Each sensor has its own difficulties More research is needed No public datasets for FIR images of pedestrians
24 24 Algorithms Best detectors combine multiple features, best accuracy is achieved by combining multiple features incl. motion Nighttime (or harsh condition) detection has been barely researched a system that works only at daytime, under good weather conditions (no heavy rain/snow/fog), over a range of distances up to 50 m is, from our viewpoint, the first intermediate challenge for the community - David Gerónimo on his PhD Thesis 2009
25 25 Conclusion? IEEE Transactions on pattern analysis and machine intelligence, vol. 32, no. 7, July 2010 Survey of Pedestrian Detection for Advanced Driver Assistance Systems, David Gerónimo, Antonio M. López, Angel D. Sappa, and Thorsten Graf After reviewing 108 published papers on pedestrian detection ( ) the conclusion was: However, the feeling is that we are still far from developing an ideal system.
26 26 Proximity detection Three candidates considered by MSHA 2009 Two were approved, while third was not yet tested All are based on active generation of electro-magnetic fields Criteria: Detect and alarm when in warning zone Power off when in danger zone Basics: Active EM field generated around the machine Magnitude corresponds to distance Requires calibration Predefined thresholds used
27 27 Proximity detection Nautilus international Coal-Buddy Omnidirectional antenna as transmitter in tue machine Placed roughly into the center of the machine Belt device as receiver Strata mining Hazard Avert Number of field generators placed on the machine Personal alarm device on a user Safety functions based on communication? Matrix design group The Matrix M3 The user has transmitter, machine has 4-6 receivers Tracking of tags? No use case data available?
28 28 Proximity detection
29 29 Proximity detection General: Proximity systems can be retrofitted Has to be calibrated Tradeoff between usability and safety The two first ones are based on a belt unit that detects the signal emitted by machine. Precalibrated fields. Based on initial analysis the Matrix system would be the most interesting, althought this requires additional investigation Multiple tracking units added easily Actual tracking
30 30 VTT creates business from technology
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
Automatic Labeling of Lane Markings for Autonomous Vehicles
 Automatic Labeling of Lane Markings for Autonomous Vehicles Jeffrey Kiske Stanford University 450 Serra Mall, Stanford, CA 94305 jkiske@stanford.edu 1. Introduction As autonomous vehicles become more popular,
Automatic Labeling of Lane Markings for Autonomous Vehicles Jeffrey Kiske Stanford University 450 Serra Mall, Stanford, CA 94305 jkiske@stanford.edu 1. Introduction As autonomous vehicles become more popular,
A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA
 A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA N. Zarrinpanjeh a, F. Dadrassjavan b, H. Fattahi c * a Islamic Azad University of Qazvin - nzarrin@qiau.ac.ir
A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA N. Zarrinpanjeh a, F. Dadrassjavan b, H. Fattahi c * a Islamic Azad University of Qazvin - nzarrin@qiau.ac.ir
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
Detection and Recognition of Mixed Traffic for Driver Assistance System
 Detection and Recognition of Mixed Traffic for Driver Assistance System Pradnya Meshram 1, Prof. S.S. Wankhede 2 1 Scholar, Department of Electronics Engineering, G.H.Raisoni College of Engineering, Digdoh
Detection and Recognition of Mixed Traffic for Driver Assistance System Pradnya Meshram 1, Prof. S.S. Wankhede 2 1 Scholar, Department of Electronics Engineering, G.H.Raisoni College of Engineering, Digdoh
Experiences in positioning and sensor network applications with Ultra Wide Band technology
 Experiences in positioning and sensor network applications with Ultra Wide Band technology WAMS LANGATTOMUUDESTA UUTTA BISNESTÄ Timo Lehikoinen VTT Technical Research Centre of Finland 10/14/2013 2 Contents
Experiences in positioning and sensor network applications with Ultra Wide Band technology WAMS LANGATTOMUUDESTA UUTTA BISNESTÄ Timo Lehikoinen VTT Technical Research Centre of Finland 10/14/2013 2 Contents
Collision Prevention and Area Monitoring with the LMS Laser Measurement System
 Collision Prevention and Area Monitoring with the LMS Laser Measurement System PDF processed with CutePDF evaluation edition www.cutepdf.com A v o i d...... collisions SICK Laser Measurement Systems are
Collision Prevention and Area Monitoring with the LMS Laser Measurement System PDF processed with CutePDF evaluation edition www.cutepdf.com A v o i d...... collisions SICK Laser Measurement Systems are
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite
 Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Robot Sensors. Outline. The Robot Structure. Robots and Sensors. Henrik I Christensen
 Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 hic@cc.gatech.edu Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 hic@cc.gatech.edu Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
AAA AUTOMOTIVE ENGINEERING
 AAA AUTOMOTIVE ENGINEERING Evaluation of Blind Spot Monitoring and Blind Spot Intervention Technologies 2014 AAA conducted research on blind-spot monitoring systems in the third quarter of 2014. The research
AAA AUTOMOTIVE ENGINEERING Evaluation of Blind Spot Monitoring and Blind Spot Intervention Technologies 2014 AAA conducted research on blind-spot monitoring systems in the third quarter of 2014. The research
Development of an Automotive Active Safety System Using a 24 GHz-band High Resolution Multi-Mode Radar
 Special Issue Automobile Electronics Development of an Automotive Active Safety System Using a 24 GHz-band High Resolution Multi-Mode Yasushi Aoyagi* 1, Keisuke Morii* 1, Yoshiyuki Ishida* 1, Takashi Kawate*
Special Issue Automobile Electronics Development of an Automotive Active Safety System Using a 24 GHz-band High Resolution Multi-Mode Yasushi Aoyagi* 1, Keisuke Morii* 1, Yoshiyuki Ishida* 1, Takashi Kawate*
: SICK Proximity Detection & Operator Guidance Systems
 : SICK Proximity Detection & Operator Guidance Systems protecting people and equipment Nicky Guenther, Technical Industry Manager SICK Solution Centre Mining 04/03/2013 Contents : Situation in the Industry
: SICK Proximity Detection & Operator Guidance Systems protecting people and equipment Nicky Guenther, Technical Industry Manager SICK Solution Centre Mining 04/03/2013 Contents : Situation in the Industry
Static Environment Recognition Using Omni-camera from a Moving Vehicle
 Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty
 Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty GOOGLE CAR uiopasdfghjklzxcvbnmqwertyuiopasdf Gonzalo Ghigliazza
Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty GOOGLE CAR uiopasdfghjklzxcvbnmqwertyuiopasdf Gonzalo Ghigliazza
Towards Zero Accidents and Increased Productivity in Roadside Construction
 Towards Zero Accidents and Increased Productivity in Roadside Construction Project within FFI Vehicle and Traffic Safety Author: Stefan Bergquist and Peter Wallin Date: 2015-03-25 Content 1. Executive
Towards Zero Accidents and Increased Productivity in Roadside Construction Project within FFI Vehicle and Traffic Safety Author: Stefan Bergquist and Peter Wallin Date: 2015-03-25 Content 1. Executive
Tips and Technology For Bosch Partners
 Tips and Technology For Bosch Partners Current information for the successful workshop No. 04/2015 Electrics / Elektronics Driver Assistance Systems In this issue, we are continuing our series on automated
Tips and Technology For Bosch Partners Current information for the successful workshop No. 04/2015 Electrics / Elektronics Driver Assistance Systems In this issue, we are continuing our series on automated
Department of Information Engineering University of Pisa. Automotive Radar. Maria S. Greco. 2012 IEEE Radar Conference, May 7-11, Atlanta
 Department of Information Engineering University of Pisa. Automotive Radar Maria S. Greco Automotive RADAR Why? Automotive RADARs as core sensor (range, speed) of driver assistance systems: long range
Department of Information Engineering University of Pisa. Automotive Radar Maria S. Greco Automotive RADAR Why? Automotive RADARs as core sensor (range, speed) of driver assistance systems: long range
RESULTS FROM A SIMPLE INFRARED CLOUD DETECTOR
 RESULTS FROM A SIMPLE INFRARED CLOUD DETECTOR A. Maghrabi 1 and R. Clay 2 1 Institute of Astronomical and Geophysical Research, King Abdulaziz City For Science and Technology, P.O. Box 6086 Riyadh 11442,
RESULTS FROM A SIMPLE INFRARED CLOUD DETECTOR A. Maghrabi 1 and R. Clay 2 1 Institute of Astronomical and Geophysical Research, King Abdulaziz City For Science and Technology, P.O. Box 6086 Riyadh 11442,
Cat Detect. for Surface Mining Applications
 Cat Detect for Surface Mining Applications Enhance Your Site s Safety through Increased Operator Awareness Configurable to suit your operation s needs, Cat MineStar System is the industry s broadest suite
Cat Detect for Surface Mining Applications Enhance Your Site s Safety through Increased Operator Awareness Configurable to suit your operation s needs, Cat MineStar System is the industry s broadest suite
An Energy-Based Vehicle Tracking System using Principal Component Analysis and Unsupervised ART Network
 Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '9) ISSN: 179-519 435 ISBN: 978-96-474-51-2 An Energy-Based Vehicle Tracking System using Principal
Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '9) ISSN: 179-519 435 ISBN: 978-96-474-51-2 An Energy-Based Vehicle Tracking System using Principal
Advanced Vehicle Safety Control System
 Hitachi Review Vol. 63 (2014), No. 2 116 Advanced Vehicle Safety Control System Hiroshi Kuroda, Dr. Eng. Atsushi Yokoyama Taisetsu Tanimichi Yuji Otsuka OVERVIEW: Hitachi has been working on the development
Hitachi Review Vol. 63 (2014), No. 2 116 Advanced Vehicle Safety Control System Hiroshi Kuroda, Dr. Eng. Atsushi Yokoyama Taisetsu Tanimichi Yuji Otsuka OVERVIEW: Hitachi has been working on the development
Traffic Monitoring Systems. Technology and sensors
 Traffic Monitoring Systems Technology and sensors Technology Inductive loops Cameras Lidar/Ladar and laser Radar GPS etc Inductive loops Inductive loops signals Inductive loop sensor The inductance signal
Traffic Monitoring Systems Technology and sensors Technology Inductive loops Cameras Lidar/Ladar and laser Radar GPS etc Inductive loops Inductive loops signals Inductive loop sensor The inductance signal
How the People Counter Works. Enhanced Building Security and Improved Marketing Intelligence. 3D MLI Sensor Technology
 People Counter A high-accuracy people counting solution that: is based on 3D MLI Sensor technology runs on embedded software performs bi-directional counting offers an accuracy of > 99% has configurable
People Counter A high-accuracy people counting solution that: is based on 3D MLI Sensor technology runs on embedded software performs bi-directional counting offers an accuracy of > 99% has configurable
Extended Floating Car Data System - Experimental Study -
 2011 IEEE Intelligent Vehicles Symposium (IV) Baden-Baden, Germany, June 5-9, 2011 Extended Floating Car Data System - Experimental Study - R. Quintero, A. Llamazares, D. F. Llorca, M. A. Sotelo, L. E.
2011 IEEE Intelligent Vehicles Symposium (IV) Baden-Baden, Germany, June 5-9, 2011 Extended Floating Car Data System - Experimental Study - R. Quintero, A. Llamazares, D. F. Llorca, M. A. Sotelo, L. E.
Range sensors. Sonar. Laser range finder. Time of Flight Camera. Structured light. 4a - Perception - Sensors. 4a 45
 R. Siegwart & D. Scaramuzza, ETH Zurich - ASL 4a 45 Range sensors Sonar Laser range finder Time of Flight Camera Structured light Infrared sensors Noncontact bump sensor (1) sensing is based on light intensity.
R. Siegwart & D. Scaramuzza, ETH Zurich - ASL 4a 45 Range sensors Sonar Laser range finder Time of Flight Camera Structured light Infrared sensors Noncontact bump sensor (1) sensing is based on light intensity.
Introduction CHAPTER 1
 CHAPTER 1 Introduction Ever since the development of the first integrated circuits in the late 1950s the complexity of such devices doubled every 20 months. A development which has been anticipated by
CHAPTER 1 Introduction Ever since the development of the first integrated circuits in the late 1950s the complexity of such devices doubled every 20 months. A development which has been anticipated by
STMicroelectronics is pleased to present the. SENSational. Attend a FREE One-Day Technical Seminar Near YOU!
 SENSational STMicroelectronics is pleased to present the SENSational Seminar Attend a FREE One-Day Technical Seminar Near YOU! Seminar Sensors and the Internet of Things are changing the way we interact
SENSational STMicroelectronics is pleased to present the SENSational Seminar Attend a FREE One-Day Technical Seminar Near YOU! Seminar Sensors and the Internet of Things are changing the way we interact
Digital Remote Sensing Data Processing Digital Remote Sensing Data Processing and Analysis: An Introduction and Analysis: An Introduction
 Digital Remote Sensing Data Processing Digital Remote Sensing Data Processing and Analysis: An Introduction and Analysis: An Introduction Content Remote sensing data Spatial, spectral, radiometric and
Digital Remote Sensing Data Processing Digital Remote Sensing Data Processing and Analysis: An Introduction and Analysis: An Introduction Content Remote sensing data Spatial, spectral, radiometric and
T-REDSPEED White paper
 T-REDSPEED White paper Index Index...2 Introduction...3 Specifications...4 Innovation...6 Technology added values...7 Introduction T-REDSPEED is an international patent pending technology for traffic violation
T-REDSPEED White paper Index Index...2 Introduction...3 Specifications...4 Innovation...6 Technology added values...7 Introduction T-REDSPEED is an international patent pending technology for traffic violation
Part-Based Pedestrian Detection and Tracking for Driver Assistance using two stage Classifier
 International Journal of Research Studies in Science, Engineering and Technology [IJRSSET] Volume 1, Issue 4, July 2014, PP 10-17 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Part-Based Pedestrian
International Journal of Research Studies in Science, Engineering and Technology [IJRSSET] Volume 1, Issue 4, July 2014, PP 10-17 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Part-Based Pedestrian
Testimony of Ann Wilson House Energy & Commerce Committee Subcommittee on Commerce, Manufacturing and Trade, October 21, 2015
 House Energy & Commerce Committee Subcommittee on Commerce, Manufacturing and Trade, October 21, 2015 Introduction Chairman Burgess, Ranking Member Schakowsky, members of the subcommittee: Thank you for
House Energy & Commerce Committee Subcommittee on Commerce, Manufacturing and Trade, October 21, 2015 Introduction Chairman Burgess, Ranking Member Schakowsky, members of the subcommittee: Thank you for
RIVA Megapixel cameras with integrated 3D Video Analytics - The next generation
 RIVA Megapixel cameras with integrated 3D Video Analytics - The next generation Creating intelligent solutions with Video Analytics (VCA- Video Content Analysis) Intelligent IP video surveillance is one
RIVA Megapixel cameras with integrated 3D Video Analytics - The next generation Creating intelligent solutions with Video Analytics (VCA- Video Content Analysis) Intelligent IP video surveillance is one
Safe Robot Driving 1 Abstract 2 The need for 360 degree safeguarding
 Safe Robot Driving Chuck Thorpe, Romuald Aufrere, Justin Carlson, Dave Duggins, Terry Fong, Jay Gowdy, John Kozar, Rob MacLaughlin, Colin McCabe, Christoph Mertz, Arne Suppe, Bob Wang, Teruko Yata @ri.cmu.edu
Safe Robot Driving Chuck Thorpe, Romuald Aufrere, Justin Carlson, Dave Duggins, Terry Fong, Jay Gowdy, John Kozar, Rob MacLaughlin, Colin McCabe, Christoph Mertz, Arne Suppe, Bob Wang, Teruko Yata @ri.cmu.edu
DWH-1B. with a security system that keeps you in touch with what matters most
 expand your senses comfort zone with a security system that keeps you in touch with what matters most HOME & SMALL BUSINESS DWH-1B designed with innovated technologies for indoor/outdoor convenient placement
expand your senses comfort zone with a security system that keeps you in touch with what matters most HOME & SMALL BUSINESS DWH-1B designed with innovated technologies for indoor/outdoor convenient placement
EB Automotive Driver Assistance EB Assist Solutions. Damian Barnett Director Automotive Software June 5, 2015
 EB Automotive Driver Assistance EB Assist Solutions Damian Barnett Director Automotive Software June 5, 2015 Advanced driver assistance systems Market growth The Growth of ADAS is predicted to be about
EB Automotive Driver Assistance EB Assist Solutions Damian Barnett Director Automotive Software June 5, 2015 Advanced driver assistance systems Market growth The Growth of ADAS is predicted to be about
The demonstration will be performed in the INTA high speed ring to emulate highway geometry and driving conditions.
 Company / Contact: Description of your project Description of your vehicle/ mock up High speed CACC with lateral control AUTOPÍA Program Centro de Automática y Robótica (UPM-CSC) The goal of this demonstration
Company / Contact: Description of your project Description of your vehicle/ mock up High speed CACC with lateral control AUTOPÍA Program Centro de Automática y Robótica (UPM-CSC) The goal of this demonstration
JEREMY SALINGER Innovation Program Manager Electrical & Control Systems Research Lab GM Global Research & Development
 JEREMY SALINGER Innovation Program Manager Electrical & Control Systems Research Lab GM Global Research & Development ROADMAP TO AUTOMATED DRIVING Autonomous Driving (Chauffeured Driving) Increasing Capability
JEREMY SALINGER Innovation Program Manager Electrical & Control Systems Research Lab GM Global Research & Development ROADMAP TO AUTOMATED DRIVING Autonomous Driving (Chauffeured Driving) Increasing Capability
No.2 October 2012. Automotive insight for Members. Stop the Crash! AEB prevents low speed crashes: now part of UK group rating
 No.2 October 2012 Automotive insight for Members Stop the Crash! AEB prevents low speed crashes: now part of UK group rating AEB Autonomous Emergency Braking AEB is potentially as important a development
No.2 October 2012 Automotive insight for Members Stop the Crash! AEB prevents low speed crashes: now part of UK group rating AEB Autonomous Emergency Braking AEB is potentially as important a development
A receiver TDC chip set for accurate pulsed time-of-flight laser ranging
 A receiver TDC chip set for accurate pulsed time-of-flight laser ranging Juha Kostamovaara, Sami Kurtti, Jussi-Pekka Jansson University of Oulu, Department of Electrical Engineering, Electronics Laboratory,
A receiver TDC chip set for accurate pulsed time-of-flight laser ranging Juha Kostamovaara, Sami Kurtti, Jussi-Pekka Jansson University of Oulu, Department of Electrical Engineering, Electronics Laboratory,
Radio Based Distance And Positioning Systems Applied To Tracking And Safety Applications In The Tubular Industry
 Radio Based Distance And Positioning Systems Applied To Tracking And Safety Applications In The Tubular Industry Dirk Brunnengraeber 1, Edgardo La Bruna 2, 1 Symeo GmbH Prof: Messerschmitt-Str. 3, 85579
Radio Based Distance And Positioning Systems Applied To Tracking And Safety Applications In The Tubular Industry Dirk Brunnengraeber 1, Edgardo La Bruna 2, 1 Symeo GmbH Prof: Messerschmitt-Str. 3, 85579
A Reliability Point and Kalman Filter-based Vehicle Tracking Technique
 A Reliability Point and Kalman Filter-based Vehicle Tracing Technique Soo Siang Teoh and Thomas Bräunl Abstract This paper introduces a technique for tracing the movement of vehicles in consecutive video
A Reliability Point and Kalman Filter-based Vehicle Tracing Technique Soo Siang Teoh and Thomas Bräunl Abstract This paper introduces a technique for tracing the movement of vehicles in consecutive video
Automatic Calibration of an In-vehicle Gaze Tracking System Using Driver s Typical Gaze Behavior
 Automatic Calibration of an In-vehicle Gaze Tracking System Using Driver s Typical Gaze Behavior Kenji Yamashiro, Daisuke Deguchi, Tomokazu Takahashi,2, Ichiro Ide, Hiroshi Murase, Kazunori Higuchi 3,
Automatic Calibration of an In-vehicle Gaze Tracking System Using Driver s Typical Gaze Behavior Kenji Yamashiro, Daisuke Deguchi, Tomokazu Takahashi,2, Ichiro Ide, Hiroshi Murase, Kazunori Higuchi 3,
Last Mile Intelligent Driving in Urban Mobility
 底 盘 电 子 控 制 系 统 研 究 室 Chassis Electronic Control Systems Laboratory 姓 学 名 号 Hui CHEN School 学 of 院 ( Automotive 系 ) Studies, Tongji University, Shanghai, China 学 科 专 业 hui-chen@tongji.edu.cn 指 导 老 师 陈
底 盘 电 子 控 制 系 统 研 究 室 Chassis Electronic Control Systems Laboratory 姓 学 名 号 Hui CHEN School 学 of 院 ( Automotive 系 ) Studies, Tongji University, Shanghai, China 学 科 专 业 hui-chen@tongji.edu.cn 指 导 老 师 陈
Infrared-based position determination for augmented cognition utilization in miniaturized traffic test facilities
 Infrared-based position determination for augmented cognition utilization in miniaturized traffic test facilities Andreas Lehner Thomas Strang Matthias Kranz Cristina Rico García German Aerospace Center
Infrared-based position determination for augmented cognition utilization in miniaturized traffic test facilities Andreas Lehner Thomas Strang Matthias Kranz Cristina Rico García German Aerospace Center
Trends in Transit Bus Accidents and Promising Collision Countermeasures
 Trends in Transit Bus Accidents and Promising Collision Countermeasures Trends in Transit Bus Accidents and Promising Collision Countermeasures C. Y. David Yang, Noblis Abstract This article presents information
Trends in Transit Bus Accidents and Promising Collision Countermeasures Trends in Transit Bus Accidents and Promising Collision Countermeasures C. Y. David Yang, Noblis Abstract This article presents information
automotive.elektrobit.com Driver assistance software EB Assist solutions
 automotive.elektrobit.com Driver assistance software EB Assist solutions From driver assistance systems to automated driving Automated driving leads to more comfortable driving and makes the road safer
automotive.elektrobit.com Driver assistance software EB Assist solutions From driver assistance systems to automated driving Automated driving leads to more comfortable driving and makes the road safer
A STUDY ON WARNING TIMING FOR LANE CHANGE DECISION AID SYSTEMS BASED ON DRIVER S LANE CHANGE MANEUVER
 A STUDY ON WARNING TIMING FOR LANE CHANGE DECISION AID SYSTEMS BASED ON DRIVER S LANE CHANGE MANEUVER Takashi Wakasugi Japan Automobile Research Institute Japan Paper Number 5-29 ABSTRACT The purpose of
A STUDY ON WARNING TIMING FOR LANE CHANGE DECISION AID SYSTEMS BASED ON DRIVER S LANE CHANGE MANEUVER Takashi Wakasugi Japan Automobile Research Institute Japan Paper Number 5-29 ABSTRACT The purpose of
CCTV - Video Analytics for Traffic Management
 CCTV - Video Analytics for Traffic Management Index Purpose Description Relevance for Large Scale Events Technologies Impacts Integration potential Implementation Best Cases and Examples 1 of 12 Purpose
CCTV - Video Analytics for Traffic Management Index Purpose Description Relevance for Large Scale Events Technologies Impacts Integration potential Implementation Best Cases and Examples 1 of 12 Purpose
Challenges for the European Automotive Software Industry
 Challenges for the European Automotive Software Industry Viewpoint of a safety supplier 28 th April 2010 Franck Lesbroussart What Trends do we see? Integration of functions Functionalities are expanding
Challenges for the European Automotive Software Industry Viewpoint of a safety supplier 28 th April 2010 Franck Lesbroussart What Trends do we see? Integration of functions Functionalities are expanding
Axis Thermal Network Cameras High-quality detection in dark and challenging conditions
 Axis Thermal Network Cameras High-quality detection in dark and challenging conditions Everything you expect from thermal cameras, except the price tag. plus all the usual Axis features. Protect what
Axis Thermal Network Cameras High-quality detection in dark and challenging conditions Everything you expect from thermal cameras, except the price tag. plus all the usual Axis features. Protect what
Selecting the Correct Automatic Identification & Data Collection Technologies for your Retail Distribution Center Application
 Selecting the Correct Automatic Identification & Data Collection Technologies for your Retail Distribution Center Application Have camera/image-based code readers replaced traditional laser scanners? Has
Selecting the Correct Automatic Identification & Data Collection Technologies for your Retail Distribution Center Application Have camera/image-based code readers replaced traditional laser scanners? Has
Analytics. CathexisVision. CathexisVision Features. Video Management Solutions
 Analytics Features Video Management Solutions The Video Analytics Suite provides a powerful enhancement to the world-class, feature-rich Video Surveillance Management software, and significantly enriches
Analytics Features Video Management Solutions The Video Analytics Suite provides a powerful enhancement to the world-class, feature-rich Video Surveillance Management software, and significantly enriches
Global Automotive Conference
 Global Automotive Conference New York, 19 November, 2014 Henrik Kaar, Director Corporate Communications Driven for Life. Autoliv, Inc. All Rights Reserved. Safe Harbor Statement * This presentation contains
Global Automotive Conference New York, 19 November, 2014 Henrik Kaar, Director Corporate Communications Driven for Life. Autoliv, Inc. All Rights Reserved. Safe Harbor Statement * This presentation contains
Analysis of Accidents by Older Drivers in Japan
 Analysis of Accidents by Older Drivers in Japan Kazumoto Morita 1, Michiaki Sekine 1 1 National Traffic Safety and Environment Laboratory, Japan Abstract Since Japan is a rapidly aging society, ensuring
Analysis of Accidents by Older Drivers in Japan Kazumoto Morita 1, Michiaki Sekine 1 1 National Traffic Safety and Environment Laboratory, Japan Abstract Since Japan is a rapidly aging society, ensuring
Vision-Based Blind Spot Detection Using Optical Flow
 Vision-Based Blind Spot Detection Using Optical Flow M.A. Sotelo 1, J. Barriga 1, D. Fernández 1, I. Parra 1, J.E. Naranjo 2, M. Marrón 1, S. Alvarez 1, and M. Gavilán 1 1 Department of Electronics, University
Vision-Based Blind Spot Detection Using Optical Flow M.A. Sotelo 1, J. Barriga 1, D. Fernández 1, I. Parra 1, J.E. Naranjo 2, M. Marrón 1, S. Alvarez 1, and M. Gavilán 1 1 Department of Electronics, University
JOINT EXPERT GROUP AND 5G VISION WORKING GROUP WORKSHOP. The Killer Application of Millimeter Wave
 JOINT EXPERT GROUP AND 5G VISION WORKING GROUP WORKSHOP V2X Communications: The Killer Application of Millimeter Wave Nuria González-Prelcic Robert W. Heath Jr. Jorge M. El MalekVázquez nuria@gts.uvigo.es
JOINT EXPERT GROUP AND 5G VISION WORKING GROUP WORKSHOP V2X Communications: The Killer Application of Millimeter Wave Nuria González-Prelcic Robert W. Heath Jr. Jorge M. El MalekVázquez nuria@gts.uvigo.es
IP-S2 HD. High Definition 3D Mobile Mapping System
 IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution High Density, Long Range LiDAR sensor for ultimate in visual detail High Accuracy IMU and DMI Odometry for positional accuracy
IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution High Density, Long Range LiDAR sensor for ultimate in visual detail High Accuracy IMU and DMI Odometry for positional accuracy
TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS
 TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS BY MARTIN WAGENER APPLICATIONS ENGINEER, TRIMBLE EUROPE OVERVIEW Today s construction industry demands more
TRIMBLE ATS TOTAL STATION ADVANCED TRACKING SYSTEMS FOR HIGH-PRECISION CONSTRUCTION APPLICATIONS BY MARTIN WAGENER APPLICATIONS ENGINEER, TRIMBLE EUROPE OVERVIEW Today s construction industry demands more
Car Collision Warning System Based on RTK GPS
 Milan HOREMUZ, Sweden Key words: RTK, GPS, road safety, Kalman filter SUMMARY Many serious traffic accidents happen when a car drives over to the opposite lane. An effective w to prevent such accidents
Milan HOREMUZ, Sweden Key words: RTK, GPS, road safety, Kalman filter SUMMARY Many serious traffic accidents happen when a car drives over to the opposite lane. An effective w to prevent such accidents
A Multisensor Multiobject Tracking System for an Autonomous Vehicle Driving in an Urban Environment *
 A Multisensor Multiobject Tracking ystem for an Autonomous Vehicle Driving in an Urban Environment * Michael Darms 1, Paul E. Rybski 2, Chris Urmson 2 1 Continental, Chassis & afety Division, 2 Carnegie
A Multisensor Multiobject Tracking ystem for an Autonomous Vehicle Driving in an Urban Environment * Michael Darms 1, Paul E. Rybski 2, Chris Urmson 2 1 Continental, Chassis & afety Division, 2 Carnegie
Sensor-Based Robotic Model for Vehicle Accident Avoidance
 Copyright 2012 American Scientific Publishers All rights reserved Printed in the United States of America Journal of Computational Intelligence and Electronic Systems Vol. 1, 1 6, 2012 Sensor-Based Robotic
Copyright 2012 American Scientific Publishers All rights reserved Printed in the United States of America Journal of Computational Intelligence and Electronic Systems Vol. 1, 1 6, 2012 Sensor-Based Robotic
E190Q Lecture 5 Autonomous Robot Navigation
 E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
AirCam OD-325HD-2.5MM
 H.264 MegaPixel Outdoor 25M IR Night vision POE Camera T AirCam OD-325HD-2.5MM AirCam OD-325HD-2.5MM is a high-end 1.3 MegaPixel network camera designed for professional outdoor surveillance and security
H.264 MegaPixel Outdoor 25M IR Night vision POE Camera T AirCam OD-325HD-2.5MM AirCam OD-325HD-2.5MM is a high-end 1.3 MegaPixel network camera designed for professional outdoor surveillance and security
Anomaly Detection and Predictive Maintenance
 Anomaly Detection and Predictive Maintenance Rosaria Silipo Iris Adae Christian Dietz Phil Winters Rosaria.Silipo@knime.com Iris.Adae@uni-konstanz.de Christian.Dietz@uni-konstanz.de Phil.Winters@knime.com
Anomaly Detection and Predictive Maintenance Rosaria Silipo Iris Adae Christian Dietz Phil Winters Rosaria.Silipo@knime.com Iris.Adae@uni-konstanz.de Christian.Dietz@uni-konstanz.de Phil.Winters@knime.com
Point Cloud Simulation & Applications Maurice Fallon
 Point Cloud & Applications Maurice Fallon Contributors: MIT: Hordur Johannsson and John Leonard U. of Salzburg: Michael Gschwandtner and Roland Kwitt Overview : Dense disparity information Efficient Image
Point Cloud & Applications Maurice Fallon Contributors: MIT: Hordur Johannsson and John Leonard U. of Salzburg: Michael Gschwandtner and Roland Kwitt Overview : Dense disparity information Efficient Image
Fall Detection System based on Kinect Sensor using Novel Detection and Posture Recognition Algorithm
 Fall Detection System based on Kinect Sensor using Novel Detection and Posture Recognition Algorithm Choon Kiat Lee 1, Vwen Yen Lee 2 1 Hwa Chong Institution, Singapore choonkiat.lee@gmail.com 2 Institute
Fall Detection System based on Kinect Sensor using Novel Detection and Posture Recognition Algorithm Choon Kiat Lee 1, Vwen Yen Lee 2 1 Hwa Chong Institution, Singapore choonkiat.lee@gmail.com 2 Institute
Tracking of Moving Objects from a Moving Vehicle Using a Scanning Laser Rangefinder
 Tracking of Moving Objects from a Moving Vehicle Using a Scanning Laser Rangefinder Robert A. MacLachlan, Member, IEEE, Christoph Mertz Abstract The capability to use a moving sensor to detect moving objects
Tracking of Moving Objects from a Moving Vehicle Using a Scanning Laser Rangefinder Robert A. MacLachlan, Member, IEEE, Christoph Mertz Abstract The capability to use a moving sensor to detect moving objects
Robot Perception Continued
 Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
INDUSTRY REPORT ON AIRBAG INDUSTRY
 INDUSTRY REPORT ON AIRBAG INDUSTRY AIRBAG MARKET GROWTH DRIVERS: Key drivers for airbags industry are: Federal regulation-first and foremost Public awareness General increase in concerns for safety Development
INDUSTRY REPORT ON AIRBAG INDUSTRY AIRBAG MARKET GROWTH DRIVERS: Key drivers for airbags industry are: Federal regulation-first and foremost Public awareness General increase in concerns for safety Development
Low-cost Platform Technology for LWIR Sensor Arrays for Use in Automotive Night Vision and Other Applications
 Low-cost Platform Technology for LWIR Sensor Arrays for Use in Automotive Night Vision and Other Applications I. Herrmann; M. Hattaß; D. Oshinubi; T. Pirk; C. Rettig; K. F. Reinhart; E. Sommer Robert Bosch
Low-cost Platform Technology for LWIR Sensor Arrays for Use in Automotive Night Vision and Other Applications I. Herrmann; M. Hattaß; D. Oshinubi; T. Pirk; C. Rettig; K. F. Reinhart; E. Sommer Robert Bosch
3D Laser Scanning Technology. Rugged hardware and powerful software combined with streamlined survey workflow
 3D Laser Scanning Technology Rugged hardware and powerful software combined with streamlined survey workflow Maptek specialises in the research, development and application of 3D laser scanning technology.
3D Laser Scanning Technology Rugged hardware and powerful software combined with streamlined survey workflow Maptek specialises in the research, development and application of 3D laser scanning technology.
M3S ANPR Automatic Number Plates Recognize System
 Zakopianska 6 Str. 03-934 Warsaw tel. (22) 511 19 99 fax: (22) 511 19 95 www.polixel.pl M3S ANPR Automatic Number Plates Recognize System M3S-ANPR Automatic Number Plates Recognize system is authorial
Zakopianska 6 Str. 03-934 Warsaw tel. (22) 511 19 99 fax: (22) 511 19 95 www.polixel.pl M3S ANPR Automatic Number Plates Recognize System M3S-ANPR Automatic Number Plates Recognize system is authorial
VEHICLE LOCALISATION AND CLASSIFICATION IN URBAN CCTV STREAMS
 VEHICLE LOCALISATION AND CLASSIFICATION IN URBAN CCTV STREAMS Norbert Buch 1, Mark Cracknell 2, James Orwell 1 and Sergio A. Velastin 1 1. Kingston University, Penrhyn Road, Kingston upon Thames, KT1 2EE,
VEHICLE LOCALISATION AND CLASSIFICATION IN URBAN CCTV STREAMS Norbert Buch 1, Mark Cracknell 2, James Orwell 1 and Sergio A. Velastin 1 1. Kingston University, Penrhyn Road, Kingston upon Thames, KT1 2EE,
AUTODOME camera family. July 2014. Our focus is tracking of objects of interest from every angle
 AUTODOME camera family July 2014 Our focus is tracking of objects of interest from every angle Our focus is tracking relevant details of moving objects, 24/7 AUTODOME cameras bring imaging to the next
AUTODOME camera family July 2014 Our focus is tracking of objects of interest from every angle Our focus is tracking relevant details of moving objects, 24/7 AUTODOME cameras bring imaging to the next
IP-S3 HD1. Compact, High-Density 3D Mobile Mapping System
 IP-S3 HD1 Compact, High-Density 3D Mobile Mapping System Integrated, turnkey solution Ultra-compact design Multiple lasers minimize scanning shades Unparalleled ease-of-use No user calibration required
IP-S3 HD1 Compact, High-Density 3D Mobile Mapping System Integrated, turnkey solution Ultra-compact design Multiple lasers minimize scanning shades Unparalleled ease-of-use No user calibration required
Modelling, Extraction and Description of Intrinsic Cues of High Resolution Satellite Images: Independent Component Analysis based approaches
 Modelling, Extraction and Description of Intrinsic Cues of High Resolution Satellite Images: Independent Component Analysis based approaches PhD Thesis by Payam Birjandi Director: Prof. Mihai Datcu Problematic
Modelling, Extraction and Description of Intrinsic Cues of High Resolution Satellite Images: Independent Component Analysis based approaches PhD Thesis by Payam Birjandi Director: Prof. Mihai Datcu Problematic
Multi-view Intelligent Vehicle Surveillance System
 Multi-view Intelligent Vehicle Surveillance System S. Denman, C. Fookes, J. Cook, C. Davoren, A. Mamic, G. Farquharson, D. Chen, B. Chen and S. Sridharan Image and Video Research Laboratory Queensland
Multi-view Intelligent Vehicle Surveillance System S. Denman, C. Fookes, J. Cook, C. Davoren, A. Mamic, G. Farquharson, D. Chen, B. Chen and S. Sridharan Image and Video Research Laboratory Queensland
Vehicle Tracking System Robust to Changes in Environmental Conditions
 INORMATION & COMMUNICATIONS Vehicle Tracking System Robust to Changes in Environmental Conditions Yasuo OGIUCHI*, Masakatsu HIGASHIKUBO, Kenji NISHIDA and Takio KURITA Driving Safety Support Systems (DSSS)
INORMATION & COMMUNICATIONS Vehicle Tracking System Robust to Changes in Environmental Conditions Yasuo OGIUCHI*, Masakatsu HIGASHIKUBO, Kenji NISHIDA and Takio KURITA Driving Safety Support Systems (DSSS)
Synthetic Aperture Radar: Principles and Applications of AI in Automatic Target Recognition
 Synthetic Aperture Radar: Principles and Applications of AI in Automatic Target Recognition Paulo Marques 1 Instituto Superior de Engenharia de Lisboa / Instituto de Telecomunicações R. Conselheiro Emídio
Synthetic Aperture Radar: Principles and Applications of AI in Automatic Target Recognition Paulo Marques 1 Instituto Superior de Engenharia de Lisboa / Instituto de Telecomunicações R. Conselheiro Emídio
DRONE DETECTION RADAR
 DRONE DETECTION RADAR MEETING TODAY S CHALLENGES Drones are increasingly becoming wide spread. They ve become affordable, easy to obtain and simple to fly. This creates new opportunities, but also poses
DRONE DETECTION RADAR MEETING TODAY S CHALLENGES Drones are increasingly becoming wide spread. They ve become affordable, easy to obtain and simple to fly. This creates new opportunities, but also poses
Hidden Camera Surveillance
 Hidden Camera Surveillance Tel 1300 763235 3G HD Solar Camera Live view in real time from any web enabled device from wherever you are. Unable to run cable? No power available? It really doesn t matter!
Hidden Camera Surveillance Tel 1300 763235 3G HD Solar Camera Live view in real time from any web enabled device from wherever you are. Unable to run cable? No power available? It really doesn t matter!
Real time vehicle detection and tracking on multiple lanes
 Real time vehicle detection and tracking on multiple lanes Kristian Kovačić Edouard Ivanjko Hrvoje Gold Department of Intelligent Transportation Systems Faculty of Transport and Traffic Sciences University
Real time vehicle detection and tracking on multiple lanes Kristian Kovačić Edouard Ivanjko Hrvoje Gold Department of Intelligent Transportation Systems Faculty of Transport and Traffic Sciences University
Overview of Sensors and Detection Systems for Wildlife Hazard Management
 Overview of Sensors and Detection Systems for Wildlife Hazard Management Edwin E. Herricks Professor Emeritus University of Illinois Center of Excellence for Airport Technology Airport Safety Management
Overview of Sensors and Detection Systems for Wildlife Hazard Management Edwin E. Herricks Professor Emeritus University of Illinois Center of Excellence for Airport Technology Airport Safety Management
SAMPLE MIDTERM QUESTIONS
 Geography 309 Sample MidTerm Questions Page 1 SAMPLE MIDTERM QUESTIONS Textbook Questions Chapter 1 Questions 4, 5, 6, Chapter 2 Questions 4, 7, 10 Chapter 4 Questions 8, 9 Chapter 10 Questions 1, 4, 7
Geography 309 Sample MidTerm Questions Page 1 SAMPLE MIDTERM QUESTIONS Textbook Questions Chapter 1 Questions 4, 5, 6, Chapter 2 Questions 4, 7, 10 Chapter 4 Questions 8, 9 Chapter 10 Questions 1, 4, 7
white paper JANUARY 2011 The Next- Warehouse Scanning and the Emergence of 2D Bar Codes
 JANUARY 2011 The Next- Generation Warehouse Long Range Scanning and the Emergence of 2D Bar Codes Table of Contents Introduction...3 Bar coding basics...4 Bar coding in the warehouse...4 Warehouse application
JANUARY 2011 The Next- Generation Warehouse Long Range Scanning and the Emergence of 2D Bar Codes Table of Contents Introduction...3 Bar coding basics...4 Bar coding in the warehouse...4 Warehouse application
Traffic Management for a Smarter City:Istanbul Istanbul Metropolitan Municipality
 Traffic Management for a Smarter City:Istanbul Istanbul Metropolitan Municipality Traffic Management for a Smarter City: Istanbul There is no doubt for Traffic Management to be an issue in a crowded city
Traffic Management for a Smarter City:Istanbul Istanbul Metropolitan Municipality Traffic Management for a Smarter City: Istanbul There is no doubt for Traffic Management to be an issue in a crowded city
2014 Annual General Meeting
 2014 Annual General Meeting Jan Carlson CEO and President May 6, 2014 Driven for Life. Our vision To substantially reduce traffic accidents, fatalities and injuries Our mission To create, manufacture and
2014 Annual General Meeting Jan Carlson CEO and President May 6, 2014 Driven for Life. Our vision To substantially reduce traffic accidents, fatalities and injuries Our mission To create, manufacture and
Innovative System for Airport Security
 Innovative System for Airport Security ATOM Airport detection and Tracking Of dangerous Materials by passive and active sensors arrays Roberta Cardinali SESM s.c.ar.l. Outline Introduction to ATOM project
Innovative System for Airport Security ATOM Airport detection and Tracking Of dangerous Materials by passive and active sensors arrays Roberta Cardinali SESM s.c.ar.l. Outline Introduction to ATOM project
Geography 403 Lecture 7 Scanners, Thermal, and Microwave
 Geography 403 Lecture 7 Scanners, Thermal, and Microwave Needs: Lect_403_7.ppt A. Basics of Passive Electric Sensors 1. Sensors absorb EMR and produce some sort of response, such as voltages differences
Geography 403 Lecture 7 Scanners, Thermal, and Microwave Needs: Lect_403_7.ppt A. Basics of Passive Electric Sensors 1. Sensors absorb EMR and produce some sort of response, such as voltages differences
2.3 Spatial Resolution, Pixel Size, and Scale
 Section 2.3 Spatial Resolution, Pixel Size, and Scale Page 39 2.3 Spatial Resolution, Pixel Size, and Scale For some remote sensing instruments, the distance between the target being imaged and the platform,
Section 2.3 Spatial Resolution, Pixel Size, and Scale Page 39 2.3 Spatial Resolution, Pixel Size, and Scale For some remote sensing instruments, the distance between the target being imaged and the platform,
ADVANCES IN PROXIMITY DETECTION TECHNOLOGIES FOR SURFACE MINING EQUIPMENT
 ADVANCES IN PROXIMITY DETECTION TECHNOLOGIES FOR SURFACE MINING EQUIPMENT Todd M. Ruff, P.E. Electrical Engineer National Institute for Occupational Safety and Health INTRODUCTION The lack of visibility
ADVANCES IN PROXIMITY DETECTION TECHNOLOGIES FOR SURFACE MINING EQUIPMENT Todd M. Ruff, P.E. Electrical Engineer National Institute for Occupational Safety and Health INTRODUCTION The lack of visibility
Experimental Evaluation of State of the Art 3D-Sensors for Mobile Robot Navigation 1)
") Experimental Evaluation of State of the Art 3D-Sensors for Mobile Robot Navigation 1) Peter Einramhof, Sven Olufs and Markus Vincze Technical University of Vienna, Automation and Control Institute {einramhof,
Experimental Evaluation of State of the Art 3D-Sensors for Mobile Robot Navigation 1) Peter Einramhof, Sven Olufs and Markus Vincze Technical University of Vienna, Automation and Control Institute {einramhof,
FMCSA Webinar Nov.18th to Examine Large Truck Crash Fatalities Involving Pedestrians & Bicyclists. New Technology for Better Fleet Management
 In This Issue: FMCSA Webinar Nov.18th to Examine Large Truck Crash Fatalities Involving Pedestrians & Bicyclists Help Prevent Roadway Accidents involving Pedestrians How to Steer Clear of Accidents with
In This Issue: FMCSA Webinar Nov.18th to Examine Large Truck Crash Fatalities Involving Pedestrians & Bicyclists Help Prevent Roadway Accidents involving Pedestrians How to Steer Clear of Accidents with
VEHICLE TRACKING USING ACOUSTIC AND VIDEO SENSORS
 VEHICLE TRACKING USING ACOUSTIC AND VIDEO SENSORS Aswin C Sankaranayanan, Qinfen Zheng, Rama Chellappa University of Maryland College Park, MD - 277 {aswch, qinfen, rama}@cfar.umd.edu Volkan Cevher, James
VEHICLE TRACKING USING ACOUSTIC AND VIDEO SENSORS Aswin C Sankaranayanan, Qinfen Zheng, Rama Chellappa University of Maryland College Park, MD - 277 {aswch, qinfen, rama}@cfar.umd.edu Volkan Cevher, James
Technical Trends of Driver Assistance/ Automated Driving
 Technical Trends of Driver Assistance/ Automated Driving Presented by Tjark Kreuzinger Senior Manager, Safety research and Technical Affairs Toyota Motor Europe NV/SV TOYOTA MOTOR CORPORATION Topics 1.
Technical Trends of Driver Assistance/ Automated Driving Presented by Tjark Kreuzinger Senior Manager, Safety research and Technical Affairs Toyota Motor Europe NV/SV TOYOTA MOTOR CORPORATION Topics 1.
False alarm in outdoor environments
 Accepted 1.0 Savantic letter 1(6) False alarm in outdoor environments Accepted 1.0 Savantic letter 2(6) Table of contents Revision history 3 References 3 1 Introduction 4 2 Pre-processing 4 3 Detection,
Accepted 1.0 Savantic letter 1(6) False alarm in outdoor environments Accepted 1.0 Savantic letter 2(6) Table of contents Revision history 3 References 3 1 Introduction 4 2 Pre-processing 4 3 Detection,
WHITE PAPER Professional Series Detectors Sensor Data Fusion February 2008
 WHITE PAPER Intrusion Professional Series Detectors Data Fusion February 2008 Introduction Bosch Security Systems, Inc. Professional Series detectors use a completely new form of processing called Data
WHITE PAPER Intrusion Professional Series Detectors Data Fusion February 2008 Introduction Bosch Security Systems, Inc. Professional Series detectors use a completely new form of processing called Data
An Environmentally Robust Proximity Warning System for Hazardous Areas
 An Environmentally Robust Proximity Warning System for Hazardous Areas William H. Schiffbauer Gary L. Mowrey, Ph.D. Electronics Technician Electrical Engineer National Institute for Occupational National
An Environmentally Robust Proximity Warning System for Hazardous Areas William H. Schiffbauer Gary L. Mowrey, Ph.D. Electronics Technician Electrical Engineer National Institute for Occupational National
Overview of the IR channels and their applications
 Ján Kaňák Slovak Hydrometeorological Institute Jan.kanak@shmu.sk Overview of the IR channels and their applications EUMeTrain, 14 June 2011 Ján Kaňák, SHMÚ 1 Basics in satellite Infrared image interpretation
Ján Kaňák Slovak Hydrometeorological Institute Jan.kanak@shmu.sk Overview of the IR channels and their applications EUMeTrain, 14 June 2011 Ján Kaňák, SHMÚ 1 Basics in satellite Infrared image interpretation
Solution 1: Algorithm Positioning
 Model No: OEAFP Series All-Fiber Pipeline Security System Solutions Solution 1: Algorithm Positioning Application conditions Applicable for outdoor long-distance oil-gas pipeline security monitoring without
Model No: OEAFP Series All-Fiber Pipeline Security System Solutions Solution 1: Algorithm Positioning Application conditions Applicable for outdoor long-distance oil-gas pipeline security monitoring without