Roots of Equations (Chapters 5 and 6)
|
|
|
- Alexandrina Williamson
- 9 years ago
- Views:
Transcription
1 Roots of Equations (Chapters 5 and 6) Problem: given f() = 0, find. In general, f() can be any function. For some forms of f(), analytical solutions are available. However, for other functions, we have to design some methods, or algorithms to find either eact, or approimate solution for f() = 0. We will focus on f() with single unknown variable, not linear, and continuous. Outline: Incremental search methods: bisection method, false position method Open methods: Newton-Raphson method, Secant method Finding repeated roots 1
 with single unknown variable, not linear, and continuous.")
2 Analytical solutions: Eample 1: a + b + c = 0, = b± b 4ac a Eample : ae b = 0. No analytical solution. Straightforward approach: Graphical techniques. The most straightforward method is to draw a picture of the function and find where the function crosses -ais. Graphically find the root: Plot f() for different values of and find the intersection with the ais. Graphical methods can be utilized to provide estimates of roots, which can be used as starting guesses for other methods. Drawbacks: not precise. Different people may have different guesses. 0 f() 1 A better method is called incremental search method, which is a general method that most computer-based methods are based on.

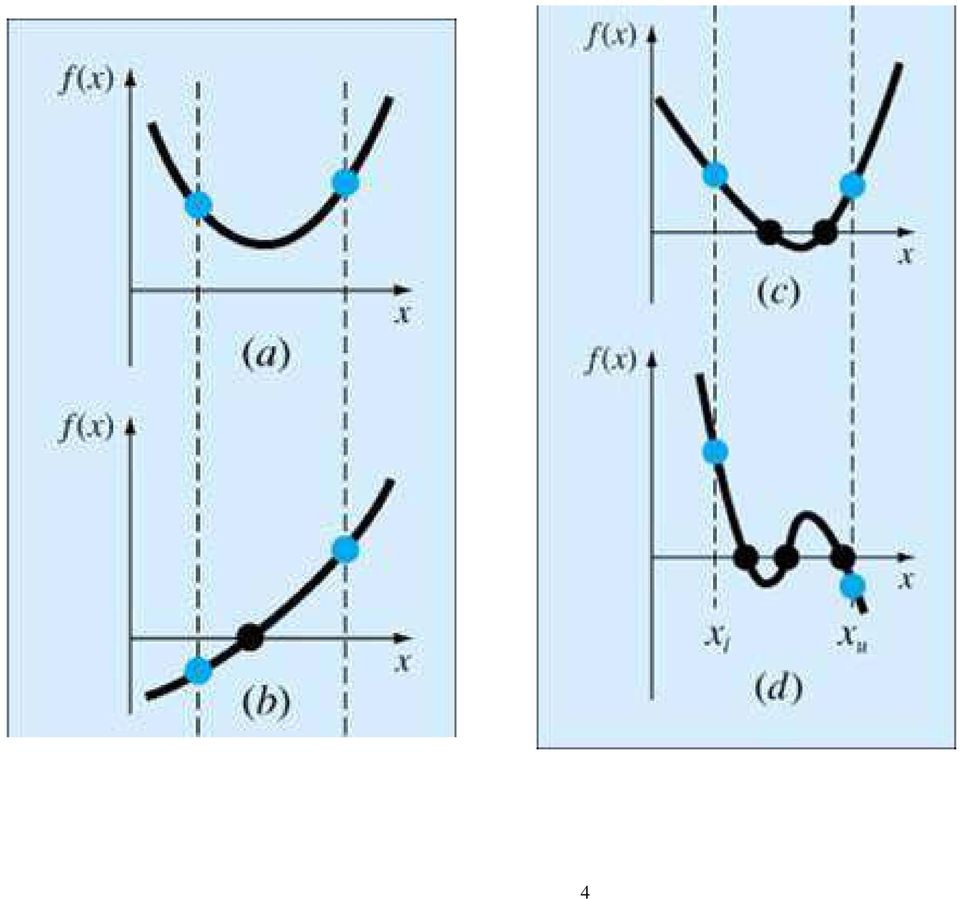
3 1 Incremental search methods: Key idea: The function f() may change signs around the roots. f() f() l l u u l u Figure 1: Illustration of incremental search method Note: f() may not change signs around the roots (see figures on the net page). This case will be dealt with later. Assume that function f() is real and continuous in interval ( l, u ) and f() has opposite signs at l and u, i.e., f( l ) f( u ) < 0 Then, there is at least one root between l and u. 3
 is real and continuous in interval ( l, u ) and f() has opposite signs at l and u, i.e., f( l ) f( u ) < 0 Then, there is at least one root between l and u.")
4 4
5 Net, we can locate the root in a smaller interval until reasonable accuracy is achieved or the root is found. Based on this, the basic steps in incremental search methods are as follows: (1). Locate an interval where the function change signs. (). Divide the interval into a number of sub-intervals. (3). Search the sub-interval to accurately locate the sign change. (4). Repeat until the root (the location of the sign change) is found. Errors in an iterative approach Since getting the eact value of the root is almost impossible during iterations, a termination criterion is needed. (When the error is below a certain stopping threshold, terminate the iterations.) Define approimate percentage relative error as new r old r ɛ a = new r 100% where new r is the estimated root for the present iteration, and old r the previous iteration. Define true percentage relative error as ɛ t = t r t 5 100% is the estimated root from

6 where t is the true solution of f() = 0, i.e., f( t ) = 0. In general, ɛ t < ɛ a. That is, if ɛ a is below the stopping threshold, then ɛ t is definitely below it as well. Bisection (or interval halving) method Bisection method is an incremental search method where sub-interval for the net iteration is selected by dividing the current interval in half..1 Bisection steps (1). Select l and u such that the function changes signs, i.e., f( l ) f( u ) < 0 (). Estimate the root as r given by (3). Determine the net interval: r = l + r If f( l ) f( r ) < 0, then the root lies in ( l, r ), set u = r and return to Step (). If f( u ) f( r ) < 0, then the root lies in ( r, u ), set l = r and return to Step (). 6
 f( r ) < 0, then the root lies in ( l, r ), set u = r and return to Step ().")
7 If f( u ) f( r ) = 0, then the root has been found. Set the solution = r and terminate the computation. (4). If ɛ a < ɛ threshold, = r ; else, repeat the above process. (new u ) l r u l r (new ) u u (new l ) l r u l r l (new ) u Figure : Bisection method If ɛ a is below a certain threshold (e.g., 1%), stop the iteration. This is, the computation is stopped when the solution does not change much from one iteration to another. 7
, stop the iteration.")
8 Eample: Find the root of f() = e 3 = 0. Solution: 1. l = 0, u = 1, f(0) = 1 > 0, f(1) = < 0, r = ( l + u )/ = 0.5, ɛ = 100%.. f(0.5) = > 0, l = r = 0.5, u = 1, r = ( l + u )/ = 0.75, ɛ a = 33.33%. 3. f(0.75) = < 0, l = 0.5, u = r = 0.75, r = 0.65, ɛ a = 0%. 4. f(0.65) = < 0, l = 0.5, u = r = 0.65, r = 0.565, ɛ a = 11%. 5. f(0.565) = > 0, l = r = 0.565, u = u = 0.65, r = , ɛ a = 5.3%. 6. f(0.5938) = > 0, l = r = , u = u = 0.65, r = , ɛ a =.6% r :

9 1 Bisection Method (between0and1) f() Figure 3: Eample of using Bisection method, f() = e 3 = 0 9
 = e 3 = 0 9")
10 . Evaluation of ɛ a old l old r old u new l new r new u Figure 4: Evaluation of ɛ a ɛ a = new r old r new r new r = 1 (new l + new u ) Therefore, new r old r = 1 new l old r + 1 new u = new l new l = 1 ( new u new ) l and ɛ a = 1 1 ( new u new ) l ( new u + new ) 100% l 10
 l and ɛ a = 1 1 ( new u new ) l ( new u + new ) 100% l")
11 or ɛ a = u l 100% u + l That is, the relative error can be found before starting the iteration..3 Finding the number of iterations Initially (iteration 0), the absolute error is E 0 a = 0 u 0 l = 0 where superscript indicates the iteration number. After first iteration, the absolute error is halved. That is After n iterations, If the desired absolute error is E a,d, then E 1 a = 1 E0 a = 0 E n a = 1 En 1 a E n a E a,d = 0 n which is equivalent to 0 n E a,d n log 0 E a,d 11

12 The minimum n is 0 log E a,d = log 10 0 E a,d log 10 1

13 Eample: Find the roots of function f() = Solution: To find the eact roots of f(), we first factorize f() as f() = = ( 1)( 0.75) = ( 1) ( 1.5) ( + 0.5) Thus, = 1, = 1.5 and = 0.5 are the eact roots of f(). l = 1, u =, the result converges to r = 0.5. l =, u =, the result converges to r = 0.5. l = 1, u = 8, the result converges to r = f()=

14 3 Newton-Raphson method 3.1 Iterations The Newton-Raphson method uses the slope (tangent) of the function f() at the current iterative solution ( i ) to find the solution ( i+1 ) in the net iteration. The slope at ( i, f( i )) is given by f ( i ) = f( i) 0 i i+1 Then i+1 can be solved as i+1 = i f( i) f ( i ) which is known as the Newton-Raphson formula. Relative error: ɛ a = i+1 i i+1 100%. Iterations stop if ɛ a ɛ threshold. 14
) is given by f ( i ) = f( i) 0 i i+1 Then i+1 can be solved as i+1 = i f( i) f ( i")
15 Figure 5: Newton-Raphson method to find the roots of an equation 15

16 Eample: Find the root of e 3 = 0. Solution: f() = e 3 f () = e 3 With these, the Newton-Raphson solution can be updated as i+1 = i e i 3 i e i Converges much faster than the bisection method. 3. Errors and termination condition The approimate percentage relative error is ɛ a = i+1 i i+1 100% f() Newton Raphson Method (from 1)

17 The Newton-Raphson iteration can be terminated when ɛ a is less than a certain threshold (e.g., 1%). 3.3 Error analysis of Newton-Raphson method using Taylor series Let t be the true solution to f() = 0. That is According to the Taylor s theorem, we have f( t ) = 0 f( t ) = f( i ) + f ( i )( t i ) + f (α) ( t i ) where α is an unknown value between t and i. Since f( t ) = 0, the above equation becomes f( i ) + f ( i )( t i ) + f (α) ( t i ) = 0 (1) In Newton-Raphson method, we use the following iteration: That is i+1 = i f( i) f ( i ) f( i ) + f ( i )( i+1 i ) = 0 () 17

18 Subtracting () from (1), we have f ( i )( t i+1 ) + f (α) ( t i ) = 0 Denoting e i = t i, which is the error in the i-th iteration, we have f ( i )e i+1 + f (α) (e i ) = 0 With convergence, i t, and α t. Then and e i+1 = f ( t ) f ( t ) e i e i+1 = f ( t ) f ( t ) e i+1 e i The error in the current iteration is proportional to the square of the previous error. That is, we have quadratic convergence with the Newton-Raphson method. The number of correct decimal places in a Newton-Raphson solution doubles after each iteration. e i Drawbacks of the Newton-Raphson method: (see Fig. 6.6 in [Chapra]) It cannot handle repeated roots 18

19 The solution may diverge near a point of inflection. The solution may oscillate near local minima or maima. With near-zero slope, the solution may diverge or reach a different root. Eample: Find the roots of function f() = Solution: To find the eact roots of f(), we first factorize f() as f() = = ( 1)( 0.75) = ( 1) ( 1.5) ( + 0.5) Thus, = 1, = 1.5 and = 0.5 are the eact roots of f(). To find the roots using the Newton-Raphson methods, write the iteration formula as i+1 = i f( i) f ( i ) = i = 1, 1 = 0.655, = 0.51, 3 = , 4 = , 5 = = 0, 1 = 3, = , 3 = 1.138, 4 = 0.711, 5 = , 6 = , 7 = , 8 =
 f ( i ) = i 3 + 0.5 + 0.75 3 4 + 0.5 0 = 1, 1 = 0.655, = 0.51, 3 = 0.5005, 4 = 0.")
20 Figure 6: Drawbacks of using NR method 0

21 0 = 0.5, 1 = 1, = 1. 0 = 1.3, 1 = , = , 3 = , 4 = = 1.5, 1 = , =
22 4 Secant method In order to implement the Newton-Raphson method, f () needs to be found analytically and evaluated numerically. In some cases, the analytical (or its numerical) evaluation may not be feasible or desirable. The Secant method is to evaluate the derivative online using two-point differencing. f() (,f( )) i 1 i 1 i i (, f( )) i+1 i i 1 i+1 i i 1 Figure 7: Secant method to find the roots of an equation As shown in the figure, f () f( i 1) f( i ) i 1 i
23 Then the Newton-Raphson iteration can be modified as which is the Secant iteration. i+1 = i f( i) f ( i ) = i f( i) f( i 1 ) f( i ) i 1 i = i f( i)( i i 1 ) f( i ) f( i 1 ) The performance of the Secant iteration is typically inferior to that of the Newton-Raphson method. Eample: f() = e 3 = 0, find. Solution: 0 = 1.1, 1 = 1, = 1 f( 1)( 1 0 ) f( 1 ) f( 0 ) = 0.709, ɛ a = 1 = 1, = 0.709, 3 = f( )( 1 ) f( ) f( 1 ) = , ɛ a = 1 = 0.709, 3 = , 4 = 3 f( 3)( 3 ) f( 3 ) f( ) = , ɛ a = 5 = , ɛ a = 3.4% 6 = , ɛ a = 0.3% 7 = , ɛ a = % = % % = 44.90% % = 17.51% 3
24 5 False position method f( u ) f() r u f( ) f( l ) l t u f( ) l l r u Figure 8: False position method to find the roots of an equation Idea: if f( l ) is closer to zero than f( n ), then the root is more likely to be closer to l than to u. (NOT always true!) False position steps: (1). Find l, u, l < u, f( l )f( u ) < 0 (). Estimate r using similar triangles: f( l ) f( u ) = r l u r 4
25 Find r as or (3). Determine net iteration interval r = [f( l) f( u )] u + f( u )( u l ) f( l ) f( u ) r = u f( u)( u l ) f( u ) f( l ) If f( l ) f( r ) < 0, then the root lies in ( l, r ), set u = r and return to Step (). If f( u ) f( r ) < 0, then the root lies in ( r, u ), set l = r and return to Step (). If f( u ) f( r ) = 0, then the root has been found. Set the solution = r and terminate the computation. (4). If ɛ a < ɛ threshold, = r ; else, back to (). False position method is one of the incremental search methods. In general, false position method performs better than bisection method. However, special case eists (see fig in tetbook). 5
26 Figure 9: Comparison between false position and Secant methods 6
27 7
28 6 Handling repeated (multiple) roots Eamples of multiple roots: f() = = ( 1)( 3) has unrepeated roots: = 1, = 3 f() = ( 1) ( 3) has repeated roots at = 1 f() = ( 1) 3 ( 3) has 3 repeated roots at = 1 f() = ( 1) 4 ( 3) has 4 repeated roots at = 1 Observations: The sign of the function does not change around even multiple roots bisection and false position methods do not work Both f() and f () go to zero around multiple roots Newton-Raphson and secant methods may converge slowly or even diverge. 6.1 Modified Newton-Raphson method Fact: Both f() and u() = f() f have the same roots, but u() has better convergence properties. () Idea: to find the roots of u() instead of f(). 8
29 3 4 f()=( 3).*( 1) 1 0 f()=( 3).*( 1) f()=( 3).*( 1). 3 0 f()=( 3).*( 1) Figure 10: Repeated roots 9
30 The Newton-Raphson method iteration for u(): or i+1 = i u( i) u ( i ) [ ] f () f()f () u () = [ f () ] i+1 = i i+1 = i [ ] f ( i ) [ f ( i ) ] f( i ) f(i )f ( i ) f ( i ) f( i )f ( i ) [ f ( i ) ] f(i )f ( i ) Modified Newton-Raphson method has quadratic convergence even for multiple roots. t is an unrepeated root of u() = 0 f() has n repeated roots, n f() = g() ( t ) n where g( t ) 0. Then f () = g ()( t ) n + g()n( t ) n 1 ] = ( t ) [g n 1 ()( t ) + ng() 30
31 and u() = Therefore, t is an unrepeated root of u() = 0. = = f() f () g() ( t ) n ( t ) [ n 1 g ()( t ) + ng() ] g() ( t ) g ()( t ) + ng() 31
Roots of equation fx are the values of x which satisfy the above expression. Also referred to as the zeros of an equation
 LECTURE 20 SOLVING FOR ROOTS OF NONLINEAR EQUATIONS Consider the equation f = 0 Roots of equation f are the values of which satisfy the above epression. Also referred to as the zeros of an equation f()
LECTURE 20 SOLVING FOR ROOTS OF NONLINEAR EQUATIONS Consider the equation f = 0 Roots of equation f are the values of which satisfy the above epression. Also referred to as the zeros of an equation f()
Implicit Differentiation
 Revision Notes 2 Calculus 1270 Fall 2007 INSTRUCTOR: Peter Roper OFFICE: LCB 313 [EMAIL: [email protected]] Standard Disclaimer These notes are not a complete review of the course thus far, and some
Revision Notes 2 Calculus 1270 Fall 2007 INSTRUCTOR: Peter Roper OFFICE: LCB 313 [EMAIL: [email protected]] Standard Disclaimer These notes are not a complete review of the course thus far, and some
G.A. Pavliotis. Department of Mathematics. Imperial College London
 EE1 MATHEMATICS NUMERICAL METHODS G.A. Pavliotis Department of Mathematics Imperial College London 1. Numerical solution of nonlinear equations (iterative processes). 2. Numerical evaluation of integrals.
EE1 MATHEMATICS NUMERICAL METHODS G.A. Pavliotis Department of Mathematics Imperial College London 1. Numerical solution of nonlinear equations (iterative processes). 2. Numerical evaluation of integrals.
Core Maths C3. Revision Notes
 Core Maths C Revision Notes October 0 Core Maths C Algebraic fractions... Cancelling common factors... Multipling and dividing fractions... Adding and subtracting fractions... Equations... 4 Functions...
Core Maths C Revision Notes October 0 Core Maths C Algebraic fractions... Cancelling common factors... Multipling and dividing fractions... Adding and subtracting fractions... Equations... 4 Functions...
Systems of Equations Involving Circles and Lines
 Name: Systems of Equations Involving Circles and Lines Date: In this lesson, we will be solving two new types of Systems of Equations. Systems of Equations Involving a Circle and a Line Solving a system
Name: Systems of Equations Involving Circles and Lines Date: In this lesson, we will be solving two new types of Systems of Equations. Systems of Equations Involving a Circle and a Line Solving a system
Section 3-3 Approximating Real Zeros of Polynomials
 - Approimating Real Zeros of Polynomials 9 Section - Approimating Real Zeros of Polynomials Locating Real Zeros The Bisection Method Approimating Multiple Zeros Application The methods for finding zeros
- Approimating Real Zeros of Polynomials 9 Section - Approimating Real Zeros of Polynomials Locating Real Zeros The Bisection Method Approimating Multiple Zeros Application The methods for finding zeros
Method To Solve Linear, Polynomial, or Absolute Value Inequalities:
 Solving Inequalities An inequality is the result of replacing the = sign in an equation with ,, or. For example, 3x 2 < 7 is a linear inequality. We call it linear because if the < were replaced with
Solving Inequalities An inequality is the result of replacing the = sign in an equation with ,, or. For example, 3x 2 < 7 is a linear inequality. We call it linear because if the < were replaced with
7.7 Solving Rational Equations
 Section 7.7 Solving Rational Equations 7 7.7 Solving Rational Equations When simplifying comple fractions in the previous section, we saw that multiplying both numerator and denominator by the appropriate
Section 7.7 Solving Rational Equations 7 7.7 Solving Rational Equations When simplifying comple fractions in the previous section, we saw that multiplying both numerator and denominator by the appropriate
D.3. Angles and Degree Measure. Review of Trigonometric Functions
 APPENDIX D Precalculus Review D7 SECTION D. Review of Trigonometric Functions Angles and Degree Measure Radian Measure The Trigonometric Functions Evaluating Trigonometric Functions Solving Trigonometric
APPENDIX D Precalculus Review D7 SECTION D. Review of Trigonometric Functions Angles and Degree Measure Radian Measure The Trigonometric Functions Evaluating Trigonometric Functions Solving Trigonometric
Core Maths C2. Revision Notes
 Core Maths C Revision Notes November 0 Core Maths C Algebra... Polnomials: +,,,.... Factorising... Long division... Remainder theorem... Factor theorem... 4 Choosing a suitable factor... 5 Cubic equations...
Core Maths C Revision Notes November 0 Core Maths C Algebra... Polnomials: +,,,.... Factorising... Long division... Remainder theorem... Factor theorem... 4 Choosing a suitable factor... 5 Cubic equations...
Aim. Decimal Search. An Excel 'macro' was used to do the calculations. A copy of the script can be found in Appendix A.
 Aim The aim of this investigation is to use and compare three different methods of finding specific solutions to polynomials that cannot be solved algebraically. The methods that will be considered are;
Aim The aim of this investigation is to use and compare three different methods of finding specific solutions to polynomials that cannot be solved algebraically. The methods that will be considered are;
3.2. Solving quadratic equations. Introduction. Prerequisites. Learning Outcomes. Learning Style
 Solving quadratic equations 3.2 Introduction A quadratic equation is one which can be written in the form ax 2 + bx + c = 0 where a, b and c are numbers and x is the unknown whose value(s) we wish to find.
Solving quadratic equations 3.2 Introduction A quadratic equation is one which can be written in the form ax 2 + bx + c = 0 where a, b and c are numbers and x is the unknown whose value(s) we wish to find.
10.1. Solving Quadratic Equations. Investigation: Rocket Science CONDENSED
 CONDENSED L E S S O N 10.1 Solving Quadratic Equations In this lesson you will look at quadratic functions that model projectile motion use tables and graphs to approimate solutions to quadratic equations
CONDENSED L E S S O N 10.1 Solving Quadratic Equations In this lesson you will look at quadratic functions that model projectile motion use tables and graphs to approimate solutions to quadratic equations
Nonlinear Algebraic Equations. Lectures INF2320 p. 1/88
 Nonlinear Algebraic Equations Lectures INF2320 p. 1/88 Lectures INF2320 p. 2/88 Nonlinear algebraic equations When solving the system u (t) = g(u), u(0) = u 0, (1) with an implicit Euler scheme we have
Nonlinear Algebraic Equations Lectures INF2320 p. 1/88 Lectures INF2320 p. 2/88 Nonlinear algebraic equations When solving the system u (t) = g(u), u(0) = u 0, (1) with an implicit Euler scheme we have
In this this review we turn our attention to the square root function, the function defined by the equation. f(x) = x. (5.1)
 = x. (5.1)") Section 5.2 The Square Root 1 5.2 The Square Root In this this review we turn our attention to the square root function, the function defined b the equation f() =. (5.1) We can determine the domain and
Section 5.2 The Square Root 1 5.2 The Square Root In this this review we turn our attention to the square root function, the function defined b the equation f() =. (5.1) We can determine the domain and
Section 3-7. Marginal Analysis in Business and Economics. Marginal Cost, Revenue, and Profit. 202 Chapter 3 The Derivative
 202 Chapter 3 The Derivative Section 3-7 Marginal Analysis in Business and Economics Marginal Cost, Revenue, and Profit Application Marginal Average Cost, Revenue, and Profit Marginal Cost, Revenue, and
202 Chapter 3 The Derivative Section 3-7 Marginal Analysis in Business and Economics Marginal Cost, Revenue, and Profit Application Marginal Average Cost, Revenue, and Profit Marginal Cost, Revenue, and
www.mathsbox.org.uk ab = c a If the coefficients a,b and c are real then either α and β are real or α and β are complex conjugates
 Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
Homework 2 Solutions
 Homework Solutions 1. (a) Find the area of a regular heagon inscribed in a circle of radius 1. Then, find the area of a regular heagon circumscribed about a circle of radius 1. Use these calculations to
Homework Solutions 1. (a) Find the area of a regular heagon inscribed in a circle of radius 1. Then, find the area of a regular heagon circumscribed about a circle of radius 1. Use these calculations to
2013 MBA Jump Start Program
 2013 MBA Jump Start Program Module 2: Mathematics Thomas Gilbert Mathematics Module Algebra Review Calculus Permutations and Combinations [Online Appendix: Basic Mathematical Concepts] 2 1 Equation of
2013 MBA Jump Start Program Module 2: Mathematics Thomas Gilbert Mathematics Module Algebra Review Calculus Permutations and Combinations [Online Appendix: Basic Mathematical Concepts] 2 1 Equation of
2008 AP Calculus AB Multiple Choice Exam
 008 AP Multiple Choice Eam Name 008 AP Calculus AB Multiple Choice Eam Section No Calculator Active AP Calculus 008 Multiple Choice 008 AP Calculus AB Multiple Choice Eam Section Calculator Active AP Calculus
008 AP Multiple Choice Eam Name 008 AP Calculus AB Multiple Choice Eam Section No Calculator Active AP Calculus 008 Multiple Choice 008 AP Calculus AB Multiple Choice Eam Section Calculator Active AP Calculus
Rootfinding for Nonlinear Equations
 > 3. Rootfinding Rootfinding for Nonlinear Equations > 3. Rootfinding Calculating the roots of an equation is a common problem in applied mathematics. f(x) = 0 (7.1) We will explore some simple numerical
> 3. Rootfinding Rootfinding for Nonlinear Equations > 3. Rootfinding Calculating the roots of an equation is a common problem in applied mathematics. f(x) = 0 (7.1) We will explore some simple numerical
TI-83/84 Plus Graphing Calculator Worksheet #2
 TI-83/8 Plus Graphing Calculator Worksheet #2 The graphing calculator is set in the following, MODE, and Y, settings. Resetting your calculator brings it back to these original settings. MODE Y Note that
TI-83/8 Plus Graphing Calculator Worksheet #2 The graphing calculator is set in the following, MODE, and Y, settings. Resetting your calculator brings it back to these original settings. MODE Y Note that
Anchorage School District/Alaska Sr. High Math Performance Standards Algebra
 Anchorage School District/Alaska Sr. High Math Performance Standards Algebra Algebra 1 2008 STANDARDS PERFORMANCE STANDARDS A1:1 Number Sense.1 Classify numbers as Real, Irrational, Rational, Integer,
Anchorage School District/Alaska Sr. High Math Performance Standards Algebra Algebra 1 2008 STANDARDS PERFORMANCE STANDARDS A1:1 Number Sense.1 Classify numbers as Real, Irrational, Rational, Integer,
Solving Quadratic Equations by Graphing. Consider an equation of the form. y ax 2 bx c a 0. In an equation of the form
 SECTION 11.3 Solving Quadratic Equations b Graphing 11.3 OBJECTIVES 1. Find an ais of smmetr 2. Find a verte 3. Graph a parabola 4. Solve quadratic equations b graphing 5. Solve an application involving
SECTION 11.3 Solving Quadratic Equations b Graphing 11.3 OBJECTIVES 1. Find an ais of smmetr 2. Find a verte 3. Graph a parabola 4. Solve quadratic equations b graphing 5. Solve an application involving
Review of Intermediate Algebra Content
 Review of Intermediate Algebra Content Table of Contents Page Factoring GCF and Trinomials of the Form + b + c... Factoring Trinomials of the Form a + b + c... Factoring Perfect Square Trinomials... 6
Review of Intermediate Algebra Content Table of Contents Page Factoring GCF and Trinomials of the Form + b + c... Factoring Trinomials of the Form a + b + c... Factoring Perfect Square Trinomials... 6
Numerical Solution of Differential
 Chapter 13 Numerical Solution of Differential Equations We have considered numerical solution procedures for two kinds of equations: In chapter 10 the unknown was a real number; in chapter 6 the unknown
Chapter 13 Numerical Solution of Differential Equations We have considered numerical solution procedures for two kinds of equations: In chapter 10 the unknown was a real number; in chapter 6 the unknown
Exponential and Logarithmic Functions
 Chapter 6 Eponential and Logarithmic Functions Section summaries Section 6.1 Composite Functions Some functions are constructed in several steps, where each of the individual steps is a function. For eample,
Chapter 6 Eponential and Logarithmic Functions Section summaries Section 6.1 Composite Functions Some functions are constructed in several steps, where each of the individual steps is a function. For eample,
A power series about x = a is the series of the form
 POWER SERIES AND THE USES OF POWER SERIES Elizabeth Wood Now we are finally going to start working with a topic that uses all of the information from the previous topics. The topic that we are going to
POWER SERIES AND THE USES OF POWER SERIES Elizabeth Wood Now we are finally going to start working with a topic that uses all of the information from the previous topics. The topic that we are going to
15.1. Exact Differential Equations. Exact First-Order Equations. Exact Differential Equations Integrating Factors
 SECTION 5. Eact First-Order Equations 09 SECTION 5. Eact First-Order Equations Eact Differential Equations Integrating Factors Eact Differential Equations In Section 5.6, ou studied applications of differential
SECTION 5. Eact First-Order Equations 09 SECTION 5. Eact First-Order Equations Eact Differential Equations Integrating Factors Eact Differential Equations In Section 5.6, ou studied applications of differential
Chapter 4 One Dimensional Kinematics
 Chapter 4 One Dimensional Kinematics 41 Introduction 1 4 Position, Time Interval, Displacement 41 Position 4 Time Interval 43 Displacement 43 Velocity 3 431 Average Velocity 3 433 Instantaneous Velocity
Chapter 4 One Dimensional Kinematics 41 Introduction 1 4 Position, Time Interval, Displacement 41 Position 4 Time Interval 43 Displacement 43 Velocity 3 431 Average Velocity 3 433 Instantaneous Velocity
Nonlinear Algebraic Equations Example
 Nonlinear Algebraic Equations Example Continuous Stirred Tank Reactor (CSTR). Look for steady state concentrations & temperature. s r (in) p,i (in) i In: N spieces with concentrations c, heat capacities
Nonlinear Algebraic Equations Example Continuous Stirred Tank Reactor (CSTR). Look for steady state concentrations & temperature. s r (in) p,i (in) i In: N spieces with concentrations c, heat capacities
Section 6-3 Double-Angle and Half-Angle Identities
 6-3 Double-Angle and Half-Angle Identities 47 Section 6-3 Double-Angle and Half-Angle Identities Double-Angle Identities Half-Angle Identities This section develops another important set of identities
6-3 Double-Angle and Half-Angle Identities 47 Section 6-3 Double-Angle and Half-Angle Identities Double-Angle Identities Half-Angle Identities This section develops another important set of identities
Lines. We have learned that the graph of a linear equation. y = mx +b
 Section 0. Lines We have learne that the graph of a linear equation = m +b is a nonvertical line with slope m an -intercept (0, b). We can also look at the angle that such a line makes with the -ais. This
Section 0. Lines We have learne that the graph of a linear equation = m +b is a nonvertical line with slope m an -intercept (0, b). We can also look at the angle that such a line makes with the -ais. This
Higher. Polynomials and Quadratics 64
 hsn.uk.net Higher Mathematics UNIT OUTCOME 1 Polnomials and Quadratics Contents Polnomials and Quadratics 64 1 Quadratics 64 The Discriminant 66 3 Completing the Square 67 4 Sketching Parabolas 70 5 Determining
hsn.uk.net Higher Mathematics UNIT OUTCOME 1 Polnomials and Quadratics Contents Polnomials and Quadratics 64 1 Quadratics 64 The Discriminant 66 3 Completing the Square 67 4 Sketching Parabolas 70 5 Determining
CS 261 Fall 2011 Solutions to Assignment #4
 CS 61 Fall 011 Solutions to Assignment #4 The following four algorithms are used to implement the bisection method, Newton s method, the secant method, and the method of false position, respectively. In
CS 61 Fall 011 Solutions to Assignment #4 The following four algorithms are used to implement the bisection method, Newton s method, the secant method, and the method of false position, respectively. In
Higher Education Math Placement
 Higher Education Math Placement Placement Assessment Problem Types 1. Whole Numbers, Fractions, and Decimals 1.1 Operations with Whole Numbers Addition with carry Subtraction with borrowing Multiplication
Higher Education Math Placement Placement Assessment Problem Types 1. Whole Numbers, Fractions, and Decimals 1.1 Operations with Whole Numbers Addition with carry Subtraction with borrowing Multiplication
4.3 Lagrange Approximation
 206 CHAP. 4 INTERPOLATION AND POLYNOMIAL APPROXIMATION Lagrange Polynomial Approximation 4.3 Lagrange Approximation Interpolation means to estimate a missing function value by taking a weighted average
206 CHAP. 4 INTERPOLATION AND POLYNOMIAL APPROXIMATION Lagrange Polynomial Approximation 4.3 Lagrange Approximation Interpolation means to estimate a missing function value by taking a weighted average
5 Numerical Differentiation
 D. Levy 5 Numerical Differentiation 5. Basic Concepts This chapter deals with numerical approximations of derivatives. The first questions that comes up to mind is: why do we need to approximate derivatives
D. Levy 5 Numerical Differentiation 5. Basic Concepts This chapter deals with numerical approximations of derivatives. The first questions that comes up to mind is: why do we need to approximate derivatives
Section 1-4 Functions: Graphs and Properties
 44 1 FUNCTIONS AND GRAPHS I(r). 2.7r where r represents R & D ependitures. (A) Complete the following table. Round values of I(r) to one decimal place. r (R & D) Net income I(r).66 1.2.7 1..8 1.8.99 2.1
44 1 FUNCTIONS AND GRAPHS I(r). 2.7r where r represents R & D ependitures. (A) Complete the following table. Round values of I(r) to one decimal place. r (R & D) Net income I(r).66 1.2.7 1..8 1.8.99 2.1
A three point formula for finding roots of equations by the method of least squares
 A three point formula for finding roots of equations by the method of least squares Ababu Teklemariam Tiruneh 1 ; William N. Ndlela 1 ; Stanley J. Nkambule 1 1 Lecturer, Department of Environmental Health
A three point formula for finding roots of equations by the method of least squares Ababu Teklemariam Tiruneh 1 ; William N. Ndlela 1 ; Stanley J. Nkambule 1 1 Lecturer, Department of Environmental Health
Polynomials. Dr. philippe B. laval Kennesaw State University. April 3, 2005
 Polynomials Dr. philippe B. laval Kennesaw State University April 3, 2005 Abstract Handout on polynomials. The following topics are covered: Polynomial Functions End behavior Extrema Polynomial Division
Polynomials Dr. philippe B. laval Kennesaw State University April 3, 2005 Abstract Handout on polynomials. The following topics are covered: Polynomial Functions End behavior Extrema Polynomial Division
A Quick Algebra Review
 1. Simplifying Epressions. Solving Equations 3. Problem Solving 4. Inequalities 5. Absolute Values 6. Linear Equations 7. Systems of Equations 8. Laws of Eponents 9. Quadratics 10. Rationals 11. Radicals
1. Simplifying Epressions. Solving Equations 3. Problem Solving 4. Inequalities 5. Absolute Values 6. Linear Equations 7. Systems of Equations 8. Laws of Eponents 9. Quadratics 10. Rationals 11. Radicals
Algebra 2 Unit 8 (Chapter 7) CALCULATORS ARE NOT ALLOWED
 CALCULATORS ARE NOT ALLOWED") Algebra Unit 8 (Chapter 7) CALCULATORS ARE NOT ALLOWED. Graph eponential functions. (Sections 7., 7.) Worksheet 6. Solve eponential growth and eponential decay problems. (Sections 7., 7.) Worksheet 8.
Algebra Unit 8 (Chapter 7) CALCULATORS ARE NOT ALLOWED. Graph eponential functions. (Sections 7., 7.) Worksheet 6. Solve eponential growth and eponential decay problems. (Sections 7., 7.) Worksheet 8.
The numerical values that you find are called the solutions of the equation.
 Appendi F: Solving Equations The goal of solving equations When you are trying to solve an equation like: = 4, you are trying to determine all of the numerical values of that you could plug into that equation.
Appendi F: Solving Equations The goal of solving equations When you are trying to solve an equation like: = 4, you are trying to determine all of the numerical values of that you could plug into that equation.
LINEAR INEQUALITIES. less than, < 2x + 5 x 3 less than or equal to, greater than, > 3x 2 x 6 greater than or equal to,
 LINEAR INEQUALITIES When we use the equal sign in an equation we are stating that both sides of the equation are equal to each other. In an inequality, we are stating that both sides of the equation are
LINEAR INEQUALITIES When we use the equal sign in an equation we are stating that both sides of the equation are equal to each other. In an inequality, we are stating that both sides of the equation are
POLYNOMIAL FUNCTIONS
 POLYNOMIAL FUNCTIONS Polynomial Division.. 314 The Rational Zero Test.....317 Descarte s Rule of Signs... 319 The Remainder Theorem.....31 Finding all Zeros of a Polynomial Function.......33 Writing a
POLYNOMIAL FUNCTIONS Polynomial Division.. 314 The Rational Zero Test.....317 Descarte s Rule of Signs... 319 The Remainder Theorem.....31 Finding all Zeros of a Polynomial Function.......33 Writing a
D.2. The Cartesian Plane. The Cartesian Plane The Distance and Midpoint Formulas Equations of Circles. D10 APPENDIX D Precalculus Review
 D0 APPENDIX D Precalculus Review SECTION D. The Cartesian Plane The Cartesian Plane The Distance and Midpoint Formulas Equations of Circles The Cartesian Plane An ordered pair, of real numbers has as its
D0 APPENDIX D Precalculus Review SECTION D. The Cartesian Plane The Cartesian Plane The Distance and Midpoint Formulas Equations of Circles The Cartesian Plane An ordered pair, of real numbers has as its
DISTANCE, CIRCLES, AND QUADRATIC EQUATIONS
 a p p e n d i g DISTANCE, CIRCLES, AND QUADRATIC EQUATIONS DISTANCE BETWEEN TWO POINTS IN THE PLANE Suppose that we are interested in finding the distance d between two points P (, ) and P (, ) in the
a p p e n d i g DISTANCE, CIRCLES, AND QUADRATIC EQUATIONS DISTANCE BETWEEN TWO POINTS IN THE PLANE Suppose that we are interested in finding the distance d between two points P (, ) and P (, ) in the
Root Computations of Real-coefficient Polynomials using Spreadsheets*
 Int. J. Engng Ed. Vol. 18, No. 1, pp. 89±97, 2002 0949-149X/91 $3.00+0.00 Printed in Great Britain. # 2002 TEMPUS Publications. Root Computations of Real-coefficient Polynomials using Spreadsheets* KARIM
Int. J. Engng Ed. Vol. 18, No. 1, pp. 89±97, 2002 0949-149X/91 $3.00+0.00 Printed in Great Britain. # 2002 TEMPUS Publications. Root Computations of Real-coefficient Polynomials using Spreadsheets* KARIM
Numerical Methods for Solving Systems of Nonlinear Equations
 Numerical Methods for Solving Systems of Nonlinear Equations by Courtney Remani A project submitted to the Department of Mathematical Sciences in conformity with the requirements for Math 4301 Honour s
Numerical Methods for Solving Systems of Nonlinear Equations by Courtney Remani A project submitted to the Department of Mathematical Sciences in conformity with the requirements for Math 4301 Honour s
Answers to Basic Algebra Review
 Answers to Basic Algebra Review 1. -1.1 Follow the sign rules when adding and subtracting: If the numbers have the same sign, add them together and keep the sign. If the numbers have different signs, subtract
Answers to Basic Algebra Review 1. -1.1 Follow the sign rules when adding and subtracting: If the numbers have the same sign, add them together and keep the sign. If the numbers have different signs, subtract
Mathematics 31 Pre-calculus and Limits
 Mathematics 31 Pre-calculus and Limits Overview After completing this section, students will be epected to have acquired reliability and fluency in the algebraic skills of factoring, operations with radicals
Mathematics 31 Pre-calculus and Limits Overview After completing this section, students will be epected to have acquired reliability and fluency in the algebraic skills of factoring, operations with radicals
Polynomial and Synthetic Division. Long Division of Polynomials. Example 1. 6x 2 7x 2 x 2) 19x 2 16x 4 6x3 12x 2 7x 2 16x 7x 2 14x. 2x 4.
 19x 2 16x 4 6x3 12x 2 7x 2 16x 7x 2 14x. 2x 4.") _.qd /7/5 9: AM Page 5 Section.. Polynomial and Synthetic Division 5 Polynomial and Synthetic Division What you should learn Use long division to divide polynomials by other polynomials. Use synthetic
_.qd /7/5 9: AM Page 5 Section.. Polynomial and Synthetic Division 5 Polynomial and Synthetic Division What you should learn Use long division to divide polynomials by other polynomials. Use synthetic
Chapter 4. Polynomial and Rational Functions. 4.1 Polynomial Functions and Their Graphs
 Chapter 4. Polynomial and Rational Functions 4.1 Polynomial Functions and Their Graphs A polynomial function of degree n is a function of the form P = a n n + a n 1 n 1 + + a 2 2 + a 1 + a 0 Where a s
Chapter 4. Polynomial and Rational Functions 4.1 Polynomial Functions and Their Graphs A polynomial function of degree n is a function of the form P = a n n + a n 1 n 1 + + a 2 2 + a 1 + a 0 Where a s
Assessment Schedule 2013
 NCEA Level Mathematics (9161) 013 page 1 of 5 Assessment Schedule 013 Mathematics with Statistics: Apply algebraic methods in solving problems (9161) Evidence Statement ONE Expected Coverage Merit Excellence
NCEA Level Mathematics (9161) 013 page 1 of 5 Assessment Schedule 013 Mathematics with Statistics: Apply algebraic methods in solving problems (9161) Evidence Statement ONE Expected Coverage Merit Excellence
7.6 Approximation Errors and Simpson's Rule
 WileyPLUS: Home Help Contact us Logout Hughes-Hallett, Calculus: Single and Multivariable, 4/e Calculus I, II, and Vector Calculus Reading content Integration 7.1. Integration by Substitution 7.2. Integration
WileyPLUS: Home Help Contact us Logout Hughes-Hallett, Calculus: Single and Multivariable, 4/e Calculus I, II, and Vector Calculus Reading content Integration 7.1. Integration by Substitution 7.2. Integration
Zero: If P is a polynomial and if c is a number such that P (c) = 0 then c is a zero of P.
 = 0 then c is a zero of P.") MATH 11011 FINDING REAL ZEROS KSU OF A POLYNOMIAL Definitions: Polynomial: is a function of the form P (x) = a n x n + a n 1 x n 1 + + a x + a 1 x + a 0. The numbers a n, a n 1,..., a 1, a 0 are called
MATH 11011 FINDING REAL ZEROS KSU OF A POLYNOMIAL Definitions: Polynomial: is a function of the form P (x) = a n x n + a n 1 x n 1 + + a x + a 1 x + a 0. The numbers a n, a n 1,..., a 1, a 0 are called
MATH BOOK OF PROBLEMS SERIES. New from Pearson Custom Publishing!
 MATH BOOK OF PROBLEMS SERIES New from Pearson Custom Publishing! The Math Book of Problems Series is a database of math problems for the following courses: Pre-algebra Algebra Pre-calculus Calculus Statistics
MATH BOOK OF PROBLEMS SERIES New from Pearson Custom Publishing! The Math Book of Problems Series is a database of math problems for the following courses: Pre-algebra Algebra Pre-calculus Calculus Statistics
Math 0980 Chapter Objectives. Chapter 1: Introduction to Algebra: The Integers.
 Math 0980 Chapter Objectives Chapter 1: Introduction to Algebra: The Integers. 1. Identify the place value of a digit. 2. Write a number in words or digits. 3. Write positive and negative numbers used
Math 0980 Chapter Objectives Chapter 1: Introduction to Algebra: The Integers. 1. Identify the place value of a digit. 2. Write a number in words or digits. 3. Write positive and negative numbers used
3.3. Solving Polynomial Equations. Introduction. Prerequisites. Learning Outcomes
 Solving Polynomial Equations 3.3 Introduction Linear and quadratic equations, dealt within Sections 3.1 and 3.2, are members of a class of equations, called polynomial equations. These have the general
Solving Polynomial Equations 3.3 Introduction Linear and quadratic equations, dealt within Sections 3.1 and 3.2, are members of a class of equations, called polynomial equations. These have the general
EQUATIONS and INEQUALITIES
 EQUATIONS and INEQUALITIES Linear Equations and Slope 1. Slope a. Calculate the slope of a line given two points b. Calculate the slope of a line parallel to a given line. c. Calculate the slope of a line
EQUATIONS and INEQUALITIES Linear Equations and Slope 1. Slope a. Calculate the slope of a line given two points b. Calculate the slope of a line parallel to a given line. c. Calculate the slope of a line
Worksheet 1. What You Need to Know About Motion Along the x-axis (Part 1)
") Worksheet 1. What You Need to Know About Motion Along the x-axis (Part 1) In discussing motion, there are three closely related concepts that you need to keep straight. These are: If x(t) represents the
Worksheet 1. What You Need to Know About Motion Along the x-axis (Part 1) In discussing motion, there are three closely related concepts that you need to keep straight. These are: If x(t) represents the
This unit will lay the groundwork for later units where the students will extend this knowledge to quadratic and exponential functions.
 Algebra I Overview View unit yearlong overview here Many of the concepts presented in Algebra I are progressions of concepts that were introduced in grades 6 through 8. The content presented in this course
Algebra I Overview View unit yearlong overview here Many of the concepts presented in Algebra I are progressions of concepts that were introduced in grades 6 through 8. The content presented in this course
Section 5.0A Factoring Part 1
 Section 5.0A Factoring Part 1 I. Work Together A. Multiply the following binomials into trinomials. (Write the final result in descending order, i.e., a + b + c ). ( 7)( + 5) ( + 7)( + ) ( + 7)( + 5) (
Section 5.0A Factoring Part 1 I. Work Together A. Multiply the following binomials into trinomials. (Write the final result in descending order, i.e., a + b + c ). ( 7)( + 5) ( + 7)( + ) ( + 7)( + 5) (
Numerical Methods for Option Pricing
 Chapter 9 Numerical Methods for Option Pricing Equation (8.26) provides a way to evaluate option prices. For some simple options, such as the European call and put options, one can integrate (8.26) directly
Chapter 9 Numerical Methods for Option Pricing Equation (8.26) provides a way to evaluate option prices. For some simple options, such as the European call and put options, one can integrate (8.26) directly
1 Lecture: Integration of rational functions by decomposition
 Lecture: Integration of rational functions by decomposition into partial fractions Recognize and integrate basic rational functions, except when the denominator is a power of an irreducible quadratic.
Lecture: Integration of rational functions by decomposition into partial fractions Recognize and integrate basic rational functions, except when the denominator is a power of an irreducible quadratic.
INTRODUCTION TO ERRORS AND ERROR ANALYSIS
 INTRODUCTION TO ERRORS AND ERROR ANALYSIS To many students and to the public in general, an error is something they have done wrong. However, in science, the word error means the uncertainty which accompanies
INTRODUCTION TO ERRORS AND ERROR ANALYSIS To many students and to the public in general, an error is something they have done wrong. However, in science, the word error means the uncertainty which accompanies
Math 120 Final Exam Practice Problems, Form: A
 Math 120 Final Exam Practice Problems, Form: A Name: While every attempt was made to be complete in the types of problems given below, we make no guarantees about the completeness of the problems. Specifically,
Math 120 Final Exam Practice Problems, Form: A Name: While every attempt was made to be complete in the types of problems given below, we make no guarantees about the completeness of the problems. Specifically,
Core Maths C1. Revision Notes
 Core Maths C Revision Notes November 0 Core Maths C Algebra... Indices... Rules of indices... Surds... 4 Simplifying surds... 4 Rationalising the denominator... 4 Quadratic functions... 4 Completing the
Core Maths C Revision Notes November 0 Core Maths C Algebra... Indices... Rules of indices... Surds... 4 Simplifying surds... 4 Rationalising the denominator... 4 Quadratic functions... 4 Completing the
STATISTICA Formula Guide: Logistic Regression. Table of Contents
 : Table of Contents... 1 Overview of Model... 1 Dispersion... 2 Parameterization... 3 Sigma-Restricted Model... 3 Overparameterized Model... 4 Reference Coding... 4 Model Summary (Summary Tab)... 5 Summary
: Table of Contents... 1 Overview of Model... 1 Dispersion... 2 Parameterization... 3 Sigma-Restricted Model... 3 Overparameterized Model... 4 Reference Coding... 4 Model Summary (Summary Tab)... 5 Summary
Principles of Scientific Computing Nonlinear Equations and Optimization
 Principles of Scientific Computing Nonlinear Equations and Optimization David Bindel and Jonathan Goodman last revised March 6, 2006, printed March 6, 2009 1 1 Introduction This chapter discusses two related
Principles of Scientific Computing Nonlinear Equations and Optimization David Bindel and Jonathan Goodman last revised March 6, 2006, printed March 6, 2009 1 1 Introduction This chapter discusses two related
YOU CAN COUNT ON NUMBER LINES
 Key Idea 2 Number and Numeration: Students use number sense and numeration to develop an understanding of multiple uses of numbers in the real world, the use of numbers to communicate mathematically, and
Key Idea 2 Number and Numeration: Students use number sense and numeration to develop an understanding of multiple uses of numbers in the real world, the use of numbers to communicate mathematically, and
Basic numerical skills: EQUATIONS AND HOW TO SOLVE THEM. x + 5 = 7 2 + 5-2 = 7-2 5 + (2-2) = 7-2 5 = 5. x + 5-5 = 7-5. x + 0 = 20.
 = 7-2 5 = 5. x + 5-5 = 7-5. x + 0 = 20.") Basic numerical skills: EQUATIONS AND HOW TO SOLVE THEM 1. Introduction (really easy) An equation represents the equivalence between two quantities. The two sides of the equation are in balance, and solving
Basic numerical skills: EQUATIONS AND HOW TO SOLVE THEM 1. Introduction (really easy) An equation represents the equivalence between two quantities. The two sides of the equation are in balance, and solving
C3: Functions. Learning objectives
 CHAPTER C3: Functions Learning objectives After studing this chapter ou should: be familiar with the terms one-one and man-one mappings understand the terms domain and range for a mapping understand the
CHAPTER C3: Functions Learning objectives After studing this chapter ou should: be familiar with the terms one-one and man-one mappings understand the terms domain and range for a mapping understand the
AC 2012-4561: MATHEMATICAL MODELING AND SIMULATION US- ING LABVIEW AND LABVIEW MATHSCRIPT
 AC 2012-4561: MATHEMATICAL MODELING AND SIMULATION US- ING LABVIEW AND LABVIEW MATHSCRIPT Dr. Nikunja Swain, South Carolina State University Nikunja Swain is a professor in the College of Science, Mathematics,
AC 2012-4561: MATHEMATICAL MODELING AND SIMULATION US- ING LABVIEW AND LABVIEW MATHSCRIPT Dr. Nikunja Swain, South Carolina State University Nikunja Swain is a professor in the College of Science, Mathematics,
3.3 Real Zeros of Polynomials
 3.3 Real Zeros of Polynomials 69 3.3 Real Zeros of Polynomials In Section 3., we found that we can use synthetic division to determine if a given real number is a zero of a polynomial function. This section
3.3 Real Zeros of Polynomials 69 3.3 Real Zeros of Polynomials In Section 3., we found that we can use synthetic division to determine if a given real number is a zero of a polynomial function. This section
Continued Fractions and the Euclidean Algorithm
 Continued Fractions and the Euclidean Algorithm Lecture notes prepared for MATH 326, Spring 997 Department of Mathematics and Statistics University at Albany William F Hammond Table of Contents Introduction
Continued Fractions and the Euclidean Algorithm Lecture notes prepared for MATH 326, Spring 997 Department of Mathematics and Statistics University at Albany William F Hammond Table of Contents Introduction
135 Final Review. Determine whether the graph is symmetric with respect to the x-axis, the y-axis, and/or the origin.
 13 Final Review Find the distance d(p1, P2) between the points P1 and P2. 1) P1 = (, -6); P2 = (7, -2) 2 12 2 12 3 Determine whether the graph is smmetric with respect to the -ais, the -ais, and/or the
13 Final Review Find the distance d(p1, P2) between the points P1 and P2. 1) P1 = (, -6); P2 = (7, -2) 2 12 2 12 3 Determine whether the graph is smmetric with respect to the -ais, the -ais, and/or the
GLM, insurance pricing & big data: paying attention to convergence issues.
 GLM, insurance pricing & big data: paying attention to convergence issues. Michaël NOACK - [email protected] Senior consultant & Manager of ADDACTIS Pricing Copyright 2014 ADDACTIS Worldwide.
GLM, insurance pricing & big data: paying attention to convergence issues. Michaël NOACK - [email protected] Senior consultant & Manager of ADDACTIS Pricing Copyright 2014 ADDACTIS Worldwide.
1 Error in Euler s Method
 1 Error in Euler s Method Experience with Euler s 1 method raises some interesting questions about numerical approximations for the solutions of differential equations. 1. What determines the amount of
1 Error in Euler s Method Experience with Euler s 1 method raises some interesting questions about numerical approximations for the solutions of differential equations. 1. What determines the amount of
Zeros of Polynomial Functions
 Zeros of Polynomial Functions The Rational Zero Theorem If f (x) = a n x n + a n-1 x n-1 + + a 1 x + a 0 has integer coefficients and p/q (where p/q is reduced) is a rational zero, then p is a factor of
Zeros of Polynomial Functions The Rational Zero Theorem If f (x) = a n x n + a n-1 x n-1 + + a 1 x + a 0 has integer coefficients and p/q (where p/q is reduced) is a rational zero, then p is a factor of
Math Review. for the Quantitative Reasoning Measure of the GRE revised General Test
 Math Review for the Quantitative Reasoning Measure of the GRE revised General Test www.ets.org Overview This Math Review will familiarize you with the mathematical skills and concepts that are important
Math Review for the Quantitative Reasoning Measure of the GRE revised General Test www.ets.org Overview This Math Review will familiarize you with the mathematical skills and concepts that are important
Polynomial Degree and Finite Differences
 CONDENSED LESSON 7.1 Polynomial Degree and Finite Differences In this lesson you will learn the terminology associated with polynomials use the finite differences method to determine the degree of a polynomial
CONDENSED LESSON 7.1 Polynomial Degree and Finite Differences In this lesson you will learn the terminology associated with polynomials use the finite differences method to determine the degree of a polynomial
Solutions of Equations in One Variable. Fixed-Point Iteration II
 Solutions of Equations in One Variable Fixed-Point Iteration II Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
Solutions of Equations in One Variable Fixed-Point Iteration II Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
2.6. The Circle. Introduction. Prerequisites. Learning Outcomes
 The Circle 2.6 Introduction A circle is one of the most familiar geometrical figures and has been around a long time! In this brief Section we discuss the basic coordinate geometr of a circle - in particular
The Circle 2.6 Introduction A circle is one of the most familiar geometrical figures and has been around a long time! In this brief Section we discuss the basic coordinate geometr of a circle - in particular
Review of Fundamental Mathematics
 Review of Fundamental Mathematics As explained in the Preface and in Chapter 1 of your textbook, managerial economics applies microeconomic theory to business decision making. The decision-making tools
Review of Fundamental Mathematics As explained in the Preface and in Chapter 1 of your textbook, managerial economics applies microeconomic theory to business decision making. The decision-making tools
x 2 + y 2 = 1 y 1 = x 2 + 2x y = x 2 + 2x + 1
 Implicit Functions Defining Implicit Functions Up until now in this course, we have only talked about functions, which assign to every real number x in their domain exactly one real number f(x). The graphs
Implicit Functions Defining Implicit Functions Up until now in this course, we have only talked about functions, which assign to every real number x in their domain exactly one real number f(x). The graphs
Common Core Unit Summary Grades 6 to 8
 Common Core Unit Summary Grades 6 to 8 Grade 8: Unit 1: Congruence and Similarity- 8G1-8G5 rotations reflections and translations,( RRT=congruence) understand congruence of 2 d figures after RRT Dilations
Common Core Unit Summary Grades 6 to 8 Grade 8: Unit 1: Congruence and Similarity- 8G1-8G5 rotations reflections and translations,( RRT=congruence) understand congruence of 2 d figures after RRT Dilations
PowerScore Test Preparation (800) 545-1750
 545-1750") Question 1 Test 1, Second QR Section (version 1) List A: 0, 5,, 15, 20... QA: Standard deviation of list A QB: Standard deviation of list B Statistics: Standard Deviation Answer: The two quantities are
Question 1 Test 1, Second QR Section (version 1) List A: 0, 5,, 15, 20... QA: Standard deviation of list A QB: Standard deviation of list B Statistics: Standard Deviation Answer: The two quantities are
6.4 Logarithmic Equations and Inequalities
 6.4 Logarithmic Equations and Inequalities 459 6.4 Logarithmic Equations and Inequalities In Section 6.3 we solved equations and inequalities involving exponential functions using one of two basic strategies.
6.4 Logarithmic Equations and Inequalities 459 6.4 Logarithmic Equations and Inequalities In Section 6.3 we solved equations and inequalities involving exponential functions using one of two basic strategies.
Planar Curve Intersection
 Chapter 7 Planar Curve Intersection Curve intersection involves finding the points at which two planar curves intersect. If the two curves are parametric, the solution also identifies the parameter values
Chapter 7 Planar Curve Intersection Curve intersection involves finding the points at which two planar curves intersect. If the two curves are parametric, the solution also identifies the parameter values
Microeconomic Theory: Basic Math Concepts
 Microeconomic Theory: Basic Math Concepts Matt Van Essen University of Alabama Van Essen (U of A) Basic Math Concepts 1 / 66 Basic Math Concepts In this lecture we will review some basic mathematical concepts
Microeconomic Theory: Basic Math Concepts Matt Van Essen University of Alabama Van Essen (U of A) Basic Math Concepts 1 / 66 Basic Math Concepts In this lecture we will review some basic mathematical concepts
Chapter 4. Probability and Probability Distributions
 Chapter 4. robability and robability Distributions Importance of Knowing robability To know whether a sample is not identical to the population from which it was selected, it is necessary to assess the
Chapter 4. robability and robability Distributions Importance of Knowing robability To know whether a sample is not identical to the population from which it was selected, it is necessary to assess the
The Steepest Descent Algorithm for Unconstrained Optimization and a Bisection Line-search Method
 The Steepest Descent Algorithm for Unconstrained Optimization and a Bisection Line-search Method Robert M. Freund February, 004 004 Massachusetts Institute of Technology. 1 1 The Algorithm The problem
The Steepest Descent Algorithm for Unconstrained Optimization and a Bisection Line-search Method Robert M. Freund February, 004 004 Massachusetts Institute of Technology. 1 1 The Algorithm The problem
Answer Key for California State Standards: Algebra I
 Algebra I: Symbolic reasoning and calculations with symbols are central in algebra. Through the study of algebra, a student develops an understanding of the symbolic language of mathematics and the sciences.
Algebra I: Symbolic reasoning and calculations with symbols are central in algebra. Through the study of algebra, a student develops an understanding of the symbolic language of mathematics and the sciences.
3 e) x f) 2. Precalculus Worksheet P.1. 1. Complete the following questions from your textbook: p11: #5 10. 2. Why would you never write 5 < x > 7?
 x f) 2. Precalculus Worksheet P.1. 1. Complete the following questions from your textbook: p11: #5 10. 2. Why would you never write 5 < x > 7?") Precalculus Worksheet P.1 1. Complete the following questions from your tetbook: p11: #5 10. Why would you never write 5 < > 7? 3. Why would you never write 3 > > 8? 4. Describe the graphs below using
Precalculus Worksheet P.1 1. Complete the following questions from your tetbook: p11: #5 10. Why would you never write 5 < > 7? 3. Why would you never write 3 > > 8? 4. Describe the graphs below using