Artificial Intelligence
|
|
|
- Julian Snow
- 9 years ago
- Views:
Transcription
1 Artificial Intelligence ICS461 Fall 2010 Nancy E. Reed 1 Lecture #2- Intelligent Agents What is an intelligent? Agents and s Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Reference Ch What is an Autonomous Agent? 3 Agents Interacts with its 1. can sense its 2. make decisions, and 3. take action percepts p Sensors: eyes, sonar, An is anything that can be viewed as perceiving its through sensors and acting upon that through actuators Human : eyes, ears, and other organs for sensors; hands, legs, mouth, and other body parts for actuators Robotic : cameras and infrared range finders for sensors; various motors for actuators actions Effectors: hands, motors, (Physical) Types of Autonomous Agents Biological Agents Agents Software - Softbots Hardware - Robots 5 Software Agents - Softbots Live inside computers and networks Percepts: text, images, bits, Actions: display information, send messgaes, Examples: simulated pilots, Electric Elves, chat room bots, MS paperclip, percepts Sensors: Sensors: networks, keyboards, 6 Artificial Life Task specific Virus Entertainment actions Effectors: networks, monitors Intelligent Autonomous Agents 1

2 Robotic Agents Physical hardware interacts with the Percepts: images, sound, pressure, acceleration, Actions: movement, sound, light, percepts actions Sensors: cameras, microphones, sonar, Effectors: motors, speakers, LEDs 7 Agents and s The function maps from percept histories i to actions: [f: P* A] The program runs on the physical architecture to produce f = architecture + program Tiny Vacuum-cleaner World A vacuum-cleaner \input{tables/vacuum--functiontable} ew.html Percepts: location and contents, e.g., [A,Dirty] Actions: Left, Right, Suck, NoOp A vacuum-cleaner 11 Rational Agents An should strive to "do the right thing", based on what it can perceive and the actions it can perform. The right action is the one that will cause the to be most successful Performance measure: An objective criterion for success of an 's behavior E.g., performance measure of a vacuumcleaner could be amount of dirt cleaned up, amount of time taken, amount of electricity consumed, amount of noise generated, etc. Intelligent Autonomous Agents 2

3 Rational s Rational Agent: For each possible percept sequence, a rational should select an action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built-in knowledge the has. Rational s Rationality is distinct from omniscience (all-knowing with infinite knowledge) Agents can perform actions in order to modify future percepts so as to obtain useful information (information gathering, exploration) An is autonomous if its behavior is determined by its own experience (with ability to learn and adapt) PEAS Description PEAS: Performance measure, Environment, Actuators, Sensors Must first specify the setting for intelligent design Consider, e.g., g, the task of designing g an automated taxi driver: 1. Performance measure 2. Environment 3. Actuators 4. Sensors Taxi Example - PEAS First specify the setting for design Consider, e.g., the task of designing an automated taxi driver: Performance measure: Safe, fast, legal, comfortable trip, maximize profits Environment: Roads, other traffic, pedestrians, customers Actuators: Steering wheel, accelerator, brake, signal, horn Sensors: Cameras, sonar, speedometer, GPS, odometer, engine sensors, keyboard Medical Example: PEAS Agent: Medical diagnosis system Performance measure: Healthy patient, minimize costs, lawsuits Environment: Patient, hospital, staff Actuators: Screen display (questions, tests, diagnoses, treatments, referrals) Sensors: Keyboard (entry of symptoms, findings, patient's answers) Example Robot : PEAS Agent: Part-picking robot Performance measure: Percentage of parts in correct bins Environment: Conveyor belt with parts, bins Actuators: Jointed arm and hand Sensors: Camera, joint angle sensors Intelligent Autonomous Agents 3
 An is autonomous if its behavior is determined by its own experience (with ability to learn and adapt) PEAS Description PEAS: Performance measure, Environment, Actuators,")
4 English Tutor Example: PEAS Agent: Interactive English tutor Performance measure: Maximize student's score on test Environment: Set of students Actuators: Screen display (exercises, suggestions, corrections) Sensors: Keyboard Environment Characteristics (I) Fully observable (vs. partially observable): An 's sensors give it access to the complete state of the at each point in time. Deterministic (vs. stochastic): The next state of the is completely determined by the current state and the action executed by the. (If the is deterministic except for the actions of other s, then the is strategic) Episodic (vs. sequential): The 's experience is divided into atomic "episodes" (each episode consists of the perceiving and then performing a single action), and the choice of action in each episode depends only on the episode itself. Environment Characteristics (II) Static (vs. dynamic): The is unchanged while an is deliberating. (The is semidynamic if the itself does not change with the passage of time but the 's performance score does) Discrete (vs. continuous): A limited number of distinct, clearly defined percepts and actions. Single (vs. multi): An operating by itself in an. Environment Type Examples Chess with a clock Chess without Taxi driving a clock Fully observable Yes Yes No Deterministic Strategic Strategic No Episodic No No No Static Semi Yes No Discrete Yes Yes No Single No No No The type largely determines the design The real world is (of course) partially observable, stochastic, sequential, dynamic, continuous, multi- Quiz 23 Quiz 24 Intelligent Autonomous Agents 4
 Episodic (vs.")
5 Agent functions and programs An is completely specified by the function mapping percept sequences to actions One function (or a small equivalence class) is rational Aim: find a way to implement the rational function concisely Table-lookup \input{algorithms/table--algorithm} Drawbacks: Huge table Take a long time to build the table No autonomy Even with learning, need a long time to learn the table entries A vacuum-cleaner 27 Agent program for a vacuum-cleaner \input{algorithms/reflex-vacuum-algorithm} Agent types Four basic types in order of increasing generality: Simple reflex s Model-based reflex s Goal-based s Utility-based s Simple reflex s Intelligent Autonomous Agents 5

6 Simple reflex s \input{algorithms/d--algorithm} Model-based reflex s Model-based reflex s \input{algorithms/d+--algorithm} Goal-based s Utility-based s Learning s Intelligent Autonomous Agents 6

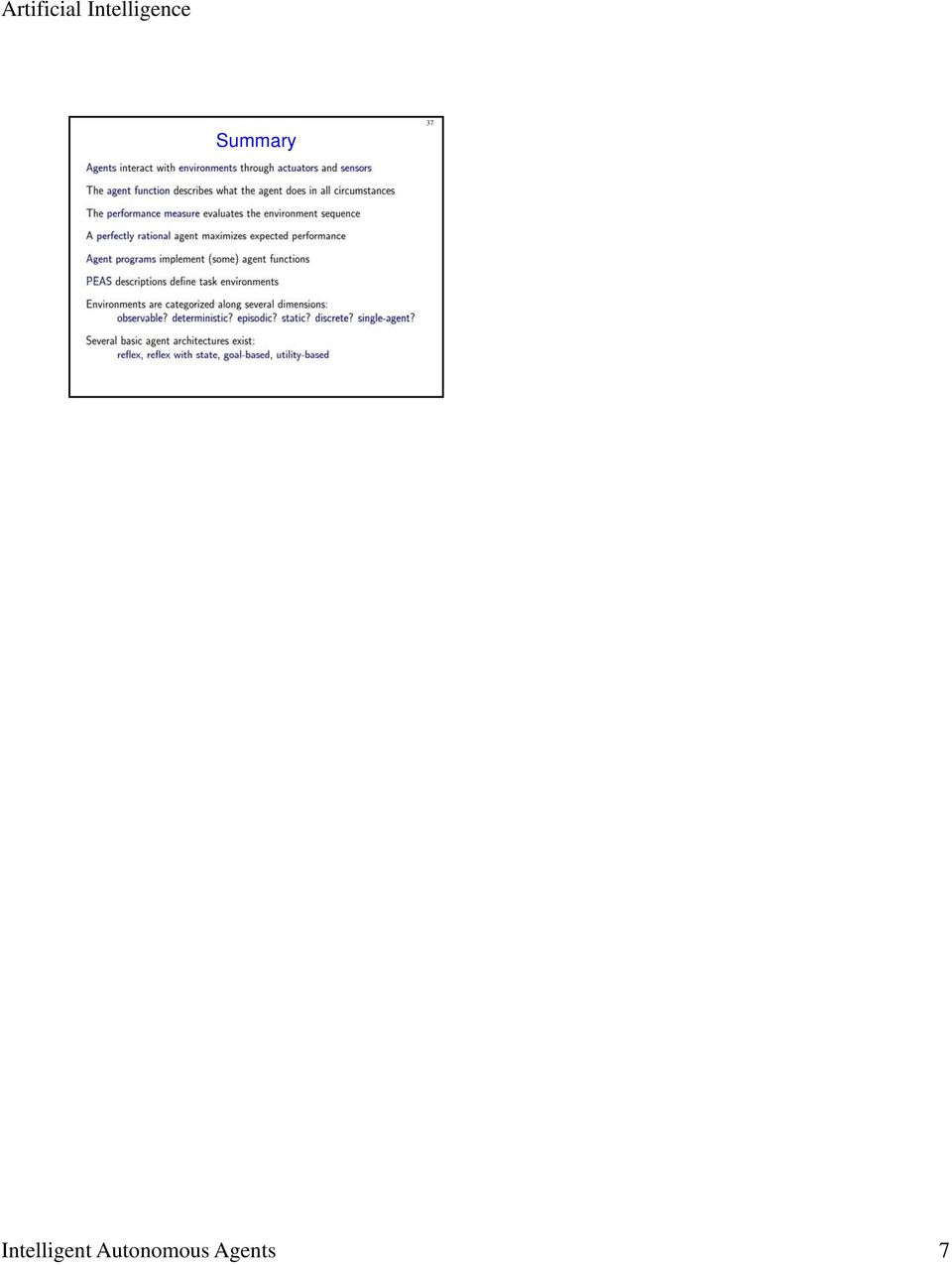
7 Summary 37 Intelligent Autonomous Agents 7
Chapter 2: Intelligent Agents
 Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2 Intelligent Agents
 1 Chapter 2 Intelligent Agents CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Spring 2008 Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
1 Chapter 2 Intelligent Agents CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Spring 2008 Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
Introduction to Artificial Intelligence. Intelligent Agents
 Introduction to Artificial Intelligence Intelligent Agents Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Agents and environments PEAS (Performance,
Introduction to Artificial Intelligence Intelligent Agents Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Agents and environments PEAS (Performance,
Intelligent Agents. Chapter 2. Chapter 2 1
 Intelligent Agents Chapter 2 Chapter 2 1 Reminders Assignment 0 (lisp refresher) due 1/28 Lisp/emacs/AIMA tutorial: 11-1 today and Monday, 271 Soda Chapter 2 2 Outline Agents and environments Rationality
Intelligent Agents Chapter 2 Chapter 2 1 Reminders Assignment 0 (lisp refresher) due 1/28 Lisp/emacs/AIMA tutorial: 11-1 today and Monday, 271 Soda Chapter 2 2 Outline Agents and environments Rationality
Agents: Rationality (2)
") Agents: Intro Agent is entity that perceives and acts Perception occurs via sensors Percept is one unit of sensory input Percept sequence is complete history of agent s percepts In general, agent s actions
Agents: Intro Agent is entity that perceives and acts Perception occurs via sensors Percept is one unit of sensory input Percept sequence is complete history of agent s percepts In general, agent s actions
Introduction to Artificial Intelligence
 Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2014 http://www.ics.uci.edu/~kkask/fall-2014 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2014 http://www.ics.uci.edu/~kkask/fall-2014 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
cs171 HW 1 - Solutions
 1. (Exercise 2.3 from RN) For each of the following assertions, say whether it is true or false and support your answer with examples or counterexamples where appropriate. (a) An agent that senses only
1. (Exercise 2.3 from RN) For each of the following assertions, say whether it is true or false and support your answer with examples or counterexamples where appropriate. (a) An agent that senses only
Measuring the Performance of an Agent
 25 Measuring the Performance of an Agent The rational agent that we are aiming at should be successful in the task it is performing To assess the success we need to have a performance measure What is rational
25 Measuring the Performance of an Agent The rational agent that we are aiming at should be successful in the task it is performing To assess the success we need to have a performance measure What is rational
Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots
![Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots](/thumbs/27/11692183.jpg "Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots") Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
A Review of Intelligent Agents
 A Review of Intelligent Agents K.Suganya 1 1 Associate Professor, Department of Software Engineering & IT(PG), A.V.C College of Engineering, Mayiladuthurai Email- [email protected] ABSTRACT An intelligent
A Review of Intelligent Agents K.Suganya 1 1 Associate Professor, Department of Software Engineering & IT(PG), A.V.C College of Engineering, Mayiladuthurai Email- [email protected] ABSTRACT An intelligent
Course Outline Department of Computing Science Faculty of Science. COMP 3710-3 Applied Artificial Intelligence (3,1,0) Fall 2015
 Fall 2015") Course Outline Department of Computing Science Faculty of Science COMP 710 - Applied Artificial Intelligence (,1,0) Fall 2015 Instructor: Office: Phone/Voice Mail: E-Mail: Course Description : Students
Course Outline Department of Computing Science Faculty of Science COMP 710 - Applied Artificial Intelligence (,1,0) Fall 2015 Instructor: Office: Phone/Voice Mail: E-Mail: Course Description : Students
Tutorial 1. Introduction to robot
 Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
Introduction to Robotics. Vikram Kapila, Associate Professor, Mechanical Engineering
 Introduction to Robotics Vikram Kapila, Associate Professor, Mechanical Engineering Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was
Introduction to Robotics Vikram Kapila, Associate Professor, Mechanical Engineering Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was
Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill
 Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill Objectives: Analyze the operation of sequential logic circuits. Understand the operation of digital counters.
Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill Objectives: Analyze the operation of sequential logic circuits. Understand the operation of digital counters.
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
Designing Behavior-Based Systems
 Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
AIBO as an Intelligent Robot Watchdog
 Master Thesis report AIBO as an Intelligent Robot Watchdog Unknown human INTRUDER DETECTED!! ALARM! Human... Bou Tsing Hau Delft, December 2006 Man-Machine Interaction Group Faculty of Electrical Engineering,
Master Thesis report AIBO as an Intelligent Robot Watchdog Unknown human INTRUDER DETECTED!! ALARM! Human... Bou Tsing Hau Delft, December 2006 Man-Machine Interaction Group Faculty of Electrical Engineering,
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
FRC WPI Robotics Library Overview
 FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation. Prof. Dr. Hani Hagras
 1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
Robot coined by Karel Capek in a 1921 science-fiction Czech play
 Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Commentary Drive Assessment
 Commentary Drive Assessment Time start: Time finish: Candidate s Name: Candidate s Email: Date of Assessment: Location: Candidate s Supervisor: Supervisors Contact Number: Supervisors Email: Assessor s
Commentary Drive Assessment Time start: Time finish: Candidate s Name: Candidate s Email: Date of Assessment: Location: Candidate s Supervisor: Supervisors Contact Number: Supervisors Email: Assessor s
Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty
 Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty GOOGLE CAR uiopasdfghjklzxcvbnmqwertyuiopasdf Gonzalo Ghigliazza
Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty GOOGLE CAR uiopasdfghjklzxcvbnmqwertyuiopasdf Gonzalo Ghigliazza
SYSTEMS, CONTROL AND MECHATRONICS
 2015 Master s programme SYSTEMS, CONTROL AND MECHATRONICS INTRODUCTION Technical, be they small consumer or medical devices or large production processes, increasingly employ electronics and computers
2015 Master s programme SYSTEMS, CONTROL AND MECHATRONICS INTRODUCTION Technical, be they small consumer or medical devices or large production processes, increasingly employ electronics and computers
Introduction to Electronic Signals
 Introduction to Electronic Signals Oscilloscope An oscilloscope displays voltage changes over time. Use an oscilloscope to view analog and digital signals when required during circuit diagnosis. Fig. 6-01
Introduction to Electronic Signals Oscilloscope An oscilloscope displays voltage changes over time. Use an oscilloscope to view analog and digital signals when required during circuit diagnosis. Fig. 6-01
ROBOTICS AND AUTONOMOUS SYSTEMS
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 3 PROGRAMMING ROBOTS comp329-2013-parsons-lect03 2/50 Today Before the labs start on Monday,
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 3 PROGRAMMING ROBOTS comp329-2013-parsons-lect03 2/50 Today Before the labs start on Monday,
TomTom HAD story How TomTom enables Highly Automated Driving
 TomTom HAD story How TomTom enables Highly Automated Driving Automotive World Webinar 12 March 2015 Jan-Maarten de Vries VP Product Marketing TomTom Automotive Automated driving is real and it is big Image:
TomTom HAD story How TomTom enables Highly Automated Driving Automotive World Webinar 12 March 2015 Jan-Maarten de Vries VP Product Marketing TomTom Automotive Automated driving is real and it is big Image:
Unit A451: Computer systems and programming. Section 2: Computing Hardware 4/5: Input and Output Devices
 Unit A451: Computer systems and programming Section 2: Computing Hardware 4/5: Input and Output Devices Input and Output devices Candidates should be able to: (a) understand the need for input and output
Unit A451: Computer systems and programming Section 2: Computing Hardware 4/5: Input and Output Devices Input and Output devices Candidates should be able to: (a) understand the need for input and output
By: M.Habibullah Pagarkar Kaushal Parekh Jogen Shah Jignasa Desai Prarthna Advani Siddhesh Sarvankar Nikhil Ghate
 AUTOMATED VEHICLE CONTROL SYSTEM By: M.Habibullah Pagarkar Kaushal Parekh Jogen Shah Jignasa Desai Prarthna Advani Siddhesh Sarvankar Nikhil Ghate Third Year Information Technology Engineering V.E.S.I.T.
AUTOMATED VEHICLE CONTROL SYSTEM By: M.Habibullah Pagarkar Kaushal Parekh Jogen Shah Jignasa Desai Prarthna Advani Siddhesh Sarvankar Nikhil Ghate Third Year Information Technology Engineering V.E.S.I.T.
CIM Computer Integrated Manufacturing
 INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
Microcontrollers, Actuators and Sensors in Mobile Robots
 SISY 2006 4 th Serbian-Hungarian Joint Symposium on Intelligent Systems Microcontrollers, Actuators and Sensors in Mobile Robots István Matijevics Polytechnical Engineering College, Subotica, Serbia [email protected]
SISY 2006 4 th Serbian-Hungarian Joint Symposium on Intelligent Systems Microcontrollers, Actuators and Sensors in Mobile Robots István Matijevics Polytechnical Engineering College, Subotica, Serbia [email protected]
North Texas FLL Coaches' Clinics. Beginning Programming October 2014. Patrick R. Michaud [email protected] republicofpi.org
 North Texas FLL Coaches' Clinics Beginning Programming October 2014 Patrick R. Michaud [email protected] republicofpi.org Goals Learn basics of Mindstorms programming Be able to accomplish some missions
North Texas FLL Coaches' Clinics Beginning Programming October 2014 Patrick R. Michaud [email protected] republicofpi.org Goals Learn basics of Mindstorms programming Be able to accomplish some missions
Adaptive Cruise Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 01 June 2016 ISSN (online): 2349-6010 Adaptive Cruise Control Prof. D. S. Vidhya Assistant Professor Miss Cecilia
IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 01 June 2016 ISSN (online): 2349-6010 Adaptive Cruise Control Prof. D. S. Vidhya Assistant Professor Miss Cecilia
Intelligent Agents. Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge
 Intelligent Agents Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge Denition of an Agent An agent is a computer system capable of autonomous action in some environment, in
Intelligent Agents Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge Denition of an Agent An agent is a computer system capable of autonomous action in some environment, in
A Study of Classification for Driver Conditions using Driving Behaviors
 A Study of Classification for Driver Conditions using Driving Behaviors Takashi IMAMURA, Hagito YAMASHITA, Zhong ZHANG, MD Rizal bin OTHMAN and Tetsuo MIYAKE Department of Production Systems Engineering
A Study of Classification for Driver Conditions using Driving Behaviors Takashi IMAMURA, Hagito YAMASHITA, Zhong ZHANG, MD Rizal bin OTHMAN and Tetsuo MIYAKE Department of Production Systems Engineering
Appendices master s degree programme Artificial Intelligence 2014-2015
 Appendices master s degree programme Artificial Intelligence 2014-2015 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
Appendices master s degree programme Artificial Intelligence 2014-2015 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
Problem-Based Group Activities for a Sensation & Perception Course. David S. Kreiner. University of Central Missouri
 -Based Group Activities for a Course David S. Kreiner University of Central Missouri Author contact information: David Kreiner Professor of Psychology University of Central Missouri Lovinger 1111 Warrensburg
-Based Group Activities for a Course David S. Kreiner University of Central Missouri Author contact information: David Kreiner Professor of Psychology University of Central Missouri Lovinger 1111 Warrensburg
Toyota Prius Hybrid Display System Usability Test Report
 Toyota Prius Hybrid Display System Usability Test Report Sample Test Script Author Shobana Subramanian Usability Test Script/ Protocol for Novice User 2 Participant tasks Observation & Checklist Initial
Toyota Prius Hybrid Display System Usability Test Report Sample Test Script Author Shobana Subramanian Usability Test Script/ Protocol for Novice User 2 Participant tasks Observation & Checklist Initial
MS INFORMATION SHEET DRIVING WITH MS. How can MS affect my ability to drive? Simultaneous coordination of arms and legs necessary when changing gears.
 MS INFORMATION SHEET DRIVING WITH MS How can MS affect my ability to drive? Driving a motor vehicle is a complex task, requiring perception, good judgement, responsiveness and reasonable physical capability.
MS INFORMATION SHEET DRIVING WITH MS How can MS affect my ability to drive? Driving a motor vehicle is a complex task, requiring perception, good judgement, responsiveness and reasonable physical capability.
Contents Intelligent Agents
 Contents 1 Intelligent Agents 3 1.1 Introduction................................. 3 1.2 What are agents?.............................. 4 1.2.1 Examples of Agents........................ 7 1.2.2 Intelligent
Contents 1 Intelligent Agents 3 1.1 Introduction................................. 3 1.2 What are agents?.............................. 4 1.2.1 Examples of Agents........................ 7 1.2.2 Intelligent
Appendix A. About RailSys 3.0. A.1 Introduction
 Appendix A About RailSys 3.0 This appendix describes the software system for analysis RailSys used to carry out the different computational experiments and scenario designing required for the research
Appendix A About RailSys 3.0 This appendix describes the software system for analysis RailSys used to carry out the different computational experiments and scenario designing required for the research
GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM
 Advances in Production Engineering & Management 4 (2009) 4, 255-262 ISSN 1854-6250 Technical paper GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM Ata, A., A.*; Elaryan, M.**; Gemaee, M.**;
Advances in Production Engineering & Management 4 (2009) 4, 255-262 ISSN 1854-6250 Technical paper GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM Ata, A., A.*; Elaryan, M.**; Gemaee, M.**;
LEGO ROBOTICS for YOUNG BEGINNERS
 LEGO ROBOTICS for YOUNG BEGINNERS A LEGOLAND California Educational Resource Guide Grades 1-3 Table of Contents Welcome Page 1 Background Information Page 2 Discovery and Learning: Simple Machines and
LEGO ROBOTICS for YOUNG BEGINNERS A LEGOLAND California Educational Resource Guide Grades 1-3 Table of Contents Welcome Page 1 Background Information Page 2 Discovery and Learning: Simple Machines and
Simulation-based traffic management for autonomous and connected vehicles
 Simulation-based traffic management for autonomous and connected vehicles Paweł Gora Faculty of Mathematics, Informatics and Mechanics University of Warsaw ITS Kraków, 3-4.12.2015 Axioms Vehicles may communicate
Simulation-based traffic management for autonomous and connected vehicles Paweł Gora Faculty of Mathematics, Informatics and Mechanics University of Warsaw ITS Kraków, 3-4.12.2015 Axioms Vehicles may communicate
Product Characteristics Page 2. Management & Administration Page 2. Real-Time Detections & Alerts Page 4. Video Search Page 6
 Data Sheet savvi Version 5.3 savvi TM is a unified video analytics software solution that offers a wide variety of analytics functionalities through a single, easy to use platform that integrates with
Data Sheet savvi Version 5.3 savvi TM is a unified video analytics software solution that offers a wide variety of analytics functionalities through a single, easy to use platform that integrates with
PROGRAM DIRECTOR: Arthur O Connor Email Contact: URL : THE PROGRAM Careers in Data Analytics Admissions Criteria CURRICULUM Program Requirements
 Data Analytics (MS) PROGRAM DIRECTOR: Arthur O Connor CUNY School of Professional Studies 101 West 31 st Street, 7 th Floor New York, NY 10001 Email Contact: Arthur O Connor, [email protected] URL:
Data Analytics (MS) PROGRAM DIRECTOR: Arthur O Connor CUNY School of Professional Studies 101 West 31 st Street, 7 th Floor New York, NY 10001 Email Contact: Arthur O Connor, [email protected] URL:
INTRODUCTION TO DIGITAL SYSTEMS. IMPLEMENTATION: MODULES (ICs) AND NETWORKS IMPLEMENTATION OF ALGORITHMS IN HARDWARE
 AND NETWORKS IMPLEMENTATION OF ALGORITHMS IN HARDWARE") INTRODUCTION TO DIGITAL SYSTEMS 1 DESCRIPTION AND DESIGN OF DIGITAL SYSTEMS FORMAL BASIS: SWITCHING ALGEBRA IMPLEMENTATION: MODULES (ICs) AND NETWORKS IMPLEMENTATION OF ALGORITHMS IN HARDWARE COURSE EMPHASIS:
INTRODUCTION TO DIGITAL SYSTEMS 1 DESCRIPTION AND DESIGN OF DIGITAL SYSTEMS FORMAL BASIS: SWITCHING ALGEBRA IMPLEMENTATION: MODULES (ICs) AND NETWORKS IMPLEMENTATION OF ALGORITHMS IN HARDWARE COURSE EMPHASIS:
Advanced Vehicle Safety Control System
 Hitachi Review Vol. 63 (2014), No. 2 116 Advanced Vehicle Safety Control System Hiroshi Kuroda, Dr. Eng. Atsushi Yokoyama Taisetsu Tanimichi Yuji Otsuka OVERVIEW: Hitachi has been working on the development
Hitachi Review Vol. 63 (2014), No. 2 116 Advanced Vehicle Safety Control System Hiroshi Kuroda, Dr. Eng. Atsushi Yokoyama Taisetsu Tanimichi Yuji Otsuka OVERVIEW: Hitachi has been working on the development
Cost Effective Automated Test Framework for Touchscreen HMI Verification
 Cost Effective Automated Test Framework for Touchscreen HMI Verification Aby N Raj 1, P. Booma Devi, M.E., (Ph.D.) 2, Sajan Kumar 3, P. Sreekalesh 4,, S. Arathy 5 1 PG Scholar, R.V.S College of Engineering,
Cost Effective Automated Test Framework for Touchscreen HMI Verification Aby N Raj 1, P. Booma Devi, M.E., (Ph.D.) 2, Sajan Kumar 3, P. Sreekalesh 4,, S. Arathy 5 1 PG Scholar, R.V.S College of Engineering,
Aria Etemad Arne Bartels Volkswagen Group Research. A Stepwise Market Introduction of Automated Driving. Detroit 10 September 2014
 Aria Etemad Arne Bartels Volkswagen Group Research A Stepwise Market Introduction of Automated Driving Detroit 10 September 2014 //Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration:
Aria Etemad Arne Bartels Volkswagen Group Research A Stepwise Market Introduction of Automated Driving Detroit 10 September 2014 //Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration:
In-Vehicle Networking
 In-Vehicle Networking SAE Network classification Class A networks Low Speed (
In-Vehicle Networking SAE Network classification Class A networks Low Speed (
Development of Docking System for Mobile Robots Using Cheap Infrared Sensors
 Development of Docking System for Mobile Robots Using Cheap Infrared Sensors K. H. Kim a, H. D. Choi a, S. Yoon a, K. W. Lee a, H. S. Ryu b, C. K. Woo b, and Y. K. Kwak a, * a Department of Mechanical
Development of Docking System for Mobile Robots Using Cheap Infrared Sensors K. H. Kim a, H. D. Choi a, S. Yoon a, K. W. Lee a, H. S. Ryu b, C. K. Woo b, and Y. K. Kwak a, * a Department of Mechanical
Robot Virtual Programming Games that work with NXT-G, LabVIEW, and ROBOTC
 Robot Virtual Programming Games that work with NXT-G, LabVIEW, and ROBOTC What We Will Cover Today Introduction What are Robot Virtual Worlds Research behind Teaching Programming with RVWs RVW Resources
Robot Virtual Programming Games that work with NXT-G, LabVIEW, and ROBOTC What We Will Cover Today Introduction What are Robot Virtual Worlds Research behind Teaching Programming with RVWs RVW Resources
Proceedings of the 9th WSEAS International Conference on APPLIED COMPUTER SCIENCE
 Automated Futures Trading Environment Effect on the Decision Making PETR TUCNIK Department of Information Technologies University of Hradec Kralove Rokitanskeho 62, 500 02 Hradec Kralove CZECH REPUBLIC
Automated Futures Trading Environment Effect on the Decision Making PETR TUCNIK Department of Information Technologies University of Hradec Kralove Rokitanskeho 62, 500 02 Hradec Kralove CZECH REPUBLIC
Introduction CHAPTER 1
 CHAPTER 1 Introduction Ever since the development of the first integrated circuits in the late 1950s the complexity of such devices doubled every 20 months. A development which has been anticipated by
CHAPTER 1 Introduction Ever since the development of the first integrated circuits in the late 1950s the complexity of such devices doubled every 20 months. A development which has been anticipated by
Swivel seats. Boot hoists. Steering aids. Hand controls. car adaptations. for all car Manufacturers SIRUSAUTOMOTIVE.CO.UK
 Boot hoists Swivel seats Steering aids Hand controls car adaptations for all car Manufacturers SIRUSAUTOMOTIVE.CO.UK 2 Many people will experience difficulty whilst driving or using a car at some point
Boot hoists Swivel seats Steering aids Hand controls car adaptations for all car Manufacturers SIRUSAUTOMOTIVE.CO.UK 2 Many people will experience difficulty whilst driving or using a car at some point
Entwicklung und Testen von Robotischen Anwendungen mit MATLAB und Simulink Maximilian Apfelbeck, MathWorks
 Entwicklung und Testen von Robotischen Anwendungen mit MATLAB und Simulink Maximilian Apfelbeck, MathWorks 2015 The MathWorks, Inc. 1 Robot Teleoperation IMU IMU V, W Control Device ROS-Node Turtlebot
Entwicklung und Testen von Robotischen Anwendungen mit MATLAB und Simulink Maximilian Apfelbeck, MathWorks 2015 The MathWorks, Inc. 1 Robot Teleoperation IMU IMU V, W Control Device ROS-Node Turtlebot
Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen 2004
 Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen, National Instruments Pittcon 2004 As more control and verification is needed in medical
Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen, National Instruments Pittcon 2004 As more control and verification is needed in medical
2/26/2008. Sensors For Robotics. What is sensing? Why do robots need sensors? What is the angle of my arm? internal information
 Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
DRIVING AFTER STROKE STROKE FACT SHEET G
 STROKE FACT SHEET G DRIVING AFTER STROKE Introduction This fact sheet is designed to tell you how to go about returning to driving; the sort of car you may need and how to get it modified if necessary.
STROKE FACT SHEET G DRIVING AFTER STROKE Introduction This fact sheet is designed to tell you how to go about returning to driving; the sort of car you may need and how to get it modified if necessary.
Bosch Packaging Academy Essential Training
 Essential Training Operating Fundamentals Work safely during operation Understand the basic functions of the equipment Get familiar with the operating elements Be able to operate the equipment Get familiar
Essential Training Operating Fundamentals Work safely during operation Understand the basic functions of the equipment Get familiar with the operating elements Be able to operate the equipment Get familiar
Automated Recording of Lectures using the Microsoft Kinect
 Automated Recording of Lectures using the Microsoft Kinect Daniel Sailer 1, Karin Weiß 2, Manuel Braun 3, Wilhelm Büchner Hochschule Ostendstraße 3 64319 Pfungstadt, Germany 1 [email protected] 2 [email protected]
Automated Recording of Lectures using the Microsoft Kinect Daniel Sailer 1, Karin Weiß 2, Manuel Braun 3, Wilhelm Büchner Hochschule Ostendstraße 3 64319 Pfungstadt, Germany 1 [email protected] 2 [email protected]
Hybrid System for Driver Assistance
 International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 15 (2014), pp. 1583-1587 International Research Publications House http://www. irphouse.com Hybrid System
International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 15 (2014), pp. 1583-1587 International Research Publications House http://www. irphouse.com Hybrid System
Safety Car Drive by Using Ultrasonic And Radar Sensors
 Safety Car Drive by Using Ultrasonic And Radar Sensors 1 Ms C.Suganya, 2 Ms A.Sivasankari 1,2 Department of Computer Science, D.K.M College for Women(Autonomous), Vellore, Tamil Nadu, India. Abstract -
Safety Car Drive by Using Ultrasonic And Radar Sensors 1 Ms C.Suganya, 2 Ms A.Sivasankari 1,2 Department of Computer Science, D.K.M College for Women(Autonomous), Vellore, Tamil Nadu, India. Abstract -
A Distributed Architecture for Teleoperation over the Internet with Application to the Remote Control of an Inverted Pendulum
 A Distributed Architecture for Teleoperation over the Internet with Application to the Remote Control of an Inverted Pendulum Denis Gillet, Christophe Salzmann, and Pierre Huguenin Swiss Federal Institute
A Distributed Architecture for Teleoperation over the Internet with Application to the Remote Control of an Inverted Pendulum Denis Gillet, Christophe Salzmann, and Pierre Huguenin Swiss Federal Institute
Industrial Automation Training Academy. PLC, HMI & Drives Training Programs Duration: 6 Months (180 ~ 240 Hours)
") nfi Industrial Automation Training Academy Presents PLC, HMI & Drives Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
nfi Industrial Automation Training Academy Presents PLC, HMI & Drives Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
from mind to motion Automotive Your partner for mechatronics
 from mind to motion Automotive Your partner for mechatronics From mind to motion Your partner for mechatronics Sonceboz s core competencies consist of design, development and production of mechatronic
from mind to motion Automotive Your partner for mechatronics From mind to motion Your partner for mechatronics Sonceboz s core competencies consist of design, development and production of mechatronic
Automatic Train Control based on the Multi-Agent Control of Cooperative Systems
 The Journal of Mathematics and Computer Science Available online at http://www.tjmcs.com The Journal of Mathematics and Computer Science Vol.1 No.4 (2010) 247-257 Automatic Train Control based on the Multi-Agent
The Journal of Mathematics and Computer Science Available online at http://www.tjmcs.com The Journal of Mathematics and Computer Science Vol.1 No.4 (2010) 247-257 Automatic Train Control based on the Multi-Agent
What is Artificial Intelligence?
 CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. 1 What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. 1 What is AI? What is
Computers. Hardware. The Central Processing Unit (CPU) CMPT 125: Lecture 1: Understanding the Computer
 CMPT 125: Lecture 1: Understanding the Computer") Computers CMPT 125: Lecture 1: Understanding the Computer Tamara Smyth, [email protected] School of Computing Science, Simon Fraser University January 3, 2009 A computer performs 2 basic functions: 1.
Computers CMPT 125: Lecture 1: Understanding the Computer Tamara Smyth, [email protected] School of Computing Science, Simon Fraser University January 3, 2009 A computer performs 2 basic functions: 1.
Artificial Intelligence
 Artificial Intelligence Robotics RWTH Aachen 1 Term and History Term comes from Karel Capek s play R.U.R. Rossum s universal robots Robots comes from the Czech word for corvee Manipulators first start
Artificial Intelligence Robotics RWTH Aachen 1 Term and History Term comes from Karel Capek s play R.U.R. Rossum s universal robots Robots comes from the Czech word for corvee Manipulators first start
The Trend Toward Convergence of Physical and Logical (Cyber) Security
 Security") The Trend Toward Convergence of Physical and Logical (Cyber) Security Fred S. Roberts Director Command, Control, and Interoperability Center for Advanced Data Analysis (CCICADA)* Rutgers University *A
The Trend Toward Convergence of Physical and Logical (Cyber) Security Fred S. Roberts Director Command, Control, and Interoperability Center for Advanced Data Analysis (CCICADA)* Rutgers University *A
JEREMY SALINGER Innovation Program Manager Electrical & Control Systems Research Lab GM Global Research & Development
 JEREMY SALINGER Innovation Program Manager Electrical & Control Systems Research Lab GM Global Research & Development ROADMAP TO AUTOMATED DRIVING Autonomous Driving (Chauffeured Driving) Increasing Capability
JEREMY SALINGER Innovation Program Manager Electrical & Control Systems Research Lab GM Global Research & Development ROADMAP TO AUTOMATED DRIVING Autonomous Driving (Chauffeured Driving) Increasing Capability
Crucial Role of ICT for the Reinvention of the Car
 Joint EC / EPoSS / ERTRAC Expert Workshop 2011 Electric Vehicle System Integration and Architecture Crucial Role of ICT for the Reinvention of the Car Karl-Josef Kuhn Siemens Corporate Research and Technologies
Joint EC / EPoSS / ERTRAC Expert Workshop 2011 Electric Vehicle System Integration and Architecture Crucial Role of ICT for the Reinvention of the Car Karl-Josef Kuhn Siemens Corporate Research and Technologies
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors
 Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 249 258 (2009) 249 Obstacle Avoidance Design for Humanoid Robot Based on Four Infrared Sensors Ching-Chang Wong 1 *, Chi-Tai Cheng 1, Kai-Hsiang
Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com g.teti@robotechsrl.
 2008/2009 A.A. Corso di Percezione Robotica Modulo D: Applicazioni ed Esercitazioni Lezione D.I Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com
2008/2009 A.A. Corso di Percezione Robotica Modulo D: Applicazioni ed Esercitazioni Lezione D.I Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com
The Growing Role of Electronics in Automobiles A Timeline of Electronics in Cars June 2, 2011
 The Growing Role of Electronics in Automobiles A Timeline of Electronics in Cars June 2, 2011 by Thomas R. Kurfess, Ph.D., P.E. Professor and BMW Chair of Manufacturing Department of Mechanical Engineering
The Growing Role of Electronics in Automobiles A Timeline of Electronics in Cars June 2, 2011 by Thomas R. Kurfess, Ph.D., P.E. Professor and BMW Chair of Manufacturing Department of Mechanical Engineering
Dr. Christopher Ganz, ABB Technology Ltd, Group Service R&D Manager Enabler for Advanced Services. IoT and Analytics for new Service Offerings
 Dr. Christopher Ganz, ABB Technology Ltd, Group Service R&D Manager Enabler for Advanced Services IoT and Analytics for new Service Offerings The Internet of Global trend 4th industrial revolution Industry
Dr. Christopher Ganz, ABB Technology Ltd, Group Service R&D Manager Enabler for Advanced Services IoT and Analytics for new Service Offerings The Internet of Global trend 4th industrial revolution Industry
AUTONOMOUS VEHICLE TECHNOLOGY: CONSIDERATIONS FOR THE AUTO INSURANCE INDUSTRY
 AUTONOMOUS VEHICLE TECHNOLOGY: CONSIDERATIONS FOR THE AUTO INSURANCE INDUSTRY 2013 Intelligent Transportation Systems (ITS) Technical Meeting Monmouth College John P. Friedman Vice President State Government
AUTONOMOUS VEHICLE TECHNOLOGY: CONSIDERATIONS FOR THE AUTO INSURANCE INDUSTRY 2013 Intelligent Transportation Systems (ITS) Technical Meeting Monmouth College John P. Friedman Vice President State Government
Implementation of a Wireless Gesture Controlled Robotic Arm
 Implementation of a Wireless Gesture Controlled Robotic Arm Saurabh A. Khajone 1, Dr. S. W. Mohod 2, V.M. Harne 3 ME, Dept. of EXTC., PRMIT&R Badnera, Sant Gadge Baba University, Amravati (M.S.), India
Implementation of a Wireless Gesture Controlled Robotic Arm Saurabh A. Khajone 1, Dr. S. W. Mohod 2, V.M. Harne 3 ME, Dept. of EXTC., PRMIT&R Badnera, Sant Gadge Baba University, Amravati (M.S.), India
Dr. Brian Murray March 4, 2011
 Event that could lead to an accident GM Autonomy HAZARD 1 Q=6e-7 Event that could lead to a hazard Control to prevent HAZARDOUS EVENT 1 HAZARDOUS EVENT 1 HAZARD CONTROL 1 r=6e-008 Q=0.0006 Q=0.001 Q=0.001
Event that could lead to an accident GM Autonomy HAZARD 1 Q=6e-7 Event that could lead to a hazard Control to prevent HAZARDOUS EVENT 1 HAZARDOUS EVENT 1 HAZARD CONTROL 1 r=6e-008 Q=0.0006 Q=0.001 Q=0.001
Appendices master s degree programme Human Machine Communication 2014-2015
 Appendices master s degree programme Human Machine Communication 2014-2015 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
Appendices master s degree programme Human Machine Communication 2014-2015 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
The Future of Mobile Robots In 2020, 26 Million Mobile Robots Will Enable Autonomy in Smart Factories, Unmanned Transportation, and Connected Homes
 The Future of Mobile Robots In 2020, 26 Million Mobile Robots Will Enable Autonomy in Smart Factories, Unmanned Transportation, and Connected Homes NE5C-MT January 2015 NE5C-MT 1 Contents Section Slide
The Future of Mobile Robots In 2020, 26 Million Mobile Robots Will Enable Autonomy in Smart Factories, Unmanned Transportation, and Connected Homes NE5C-MT January 2015 NE5C-MT 1 Contents Section Slide
Building Instructions: Maze Robot
 Building Instructions: Maze Robot Basic Design from: Building Robots with Lego Mindstorms Modifications by: David Wang Diagrams and Instructions by: David Wang Diagrams and Instructions generated by: MLCad,
Building Instructions: Maze Robot Basic Design from: Building Robots with Lego Mindstorms Modifications by: David Wang Diagrams and Instructions by: David Wang Diagrams and Instructions generated by: MLCad,
Making model-based development a reality: The development of NEC Electronics' automotive system development environment in conjunction with MATLAB
 The V850 Integrated Development Environment in Conjunction with MAT...iles and More / Web Magazine -Innovation Channel- / NEC Electronics Volume 53 (Feb 22, 2006) The V850 Integrated Development Environment
The V850 Integrated Development Environment in Conjunction with MAT...iles and More / Web Magazine -Innovation Channel- / NEC Electronics Volume 53 (Feb 22, 2006) The V850 Integrated Development Environment
What Is an Electric Motor? How Does a Rotation Sensor Work?
 What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
What is our purpose?
 Who we are? Since 1995 we have become one of the largest suppliers of electronic automotive accessories and telemetry devices in the Baltic States. Baltic Car Equipment is investing extensively into R&D
Who we are? Since 1995 we have become one of the largest suppliers of electronic automotive accessories and telemetry devices in the Baltic States. Baltic Car Equipment is investing extensively into R&D
Synthetic Sensing: Proximity / Distance Sensors
 Synthetic Sensing: Proximity / Distance Sensors MediaRobotics Lab, February 2010 Proximity detection is dependent on the object of interest. One size does not fit all For non-contact distance measurement,
Synthetic Sensing: Proximity / Distance Sensors MediaRobotics Lab, February 2010 Proximity detection is dependent on the object of interest. One size does not fit all For non-contact distance measurement,
Intelligent Flexible Automation
 Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
ExmoR A Testing Tool for Control Algorithms on Mobile Robots
 ExmoR A Testing Tool for Control Algorithms on Mobile Robots F. Lehmann, M. Ritzschke and B. Meffert Institute of Informatics, Humboldt University, Unter den Linden 6, 10099 Berlin, Germany E-mail: [email protected],
ExmoR A Testing Tool for Control Algorithms on Mobile Robots F. Lehmann, M. Ritzschke and B. Meffert Institute of Informatics, Humboldt University, Unter den Linden 6, 10099 Berlin, Germany E-mail: [email protected],