In-Vehicle Networking
|
|
|
- Bathsheba Greene
- 10 years ago
- Views:
Transcription
1 In-Vehicle Networking

2 SAE Network classification Class A networks Low Speed (<10K bits/second) Convenience features: entertainment, audio, trip computer, etc. Class B networks Medium Speed (10K b/s to 125K b/s) General information transfer: instrument cluster, vehicle speed, legislated emissions data/diagnostics, etc. Class C networks High Speed (125K b/s to 1M b/s or greater) Real-time control: powertrain control, braking, vehicle dynamics, etc.


3 Costs and Speeds for Automotive Networks


4 Automotive Body Network

5 Typical LIN Applications Roof: (high amount of wiring) Rain Sensor, Light Sensor, Light Control, Sun Roof (Rain Sensor needs to be interrogated every 10-20ms) Climate: Many Small Motors Control Panel Steering Wheel: (very many controls are going to be positioned on the steering wheel) Cruise Control, Wiper, Turning Light, Optional: Climate Control, Radio, Telephone, etc. Seat: Many Seat Position Motors, Occupancy Sensor, Control Panel Door/window/seat: Mirror, Central ECU, Mirror, Switch, Window Lift, Seat Control Switch, Door Lock, etc.


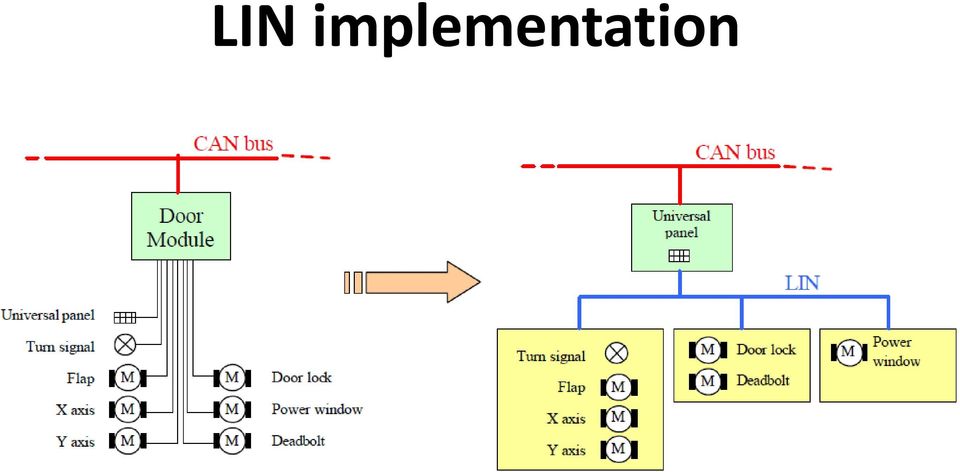
6 Hierarchical Network Struc CAN based network CAN + LIN

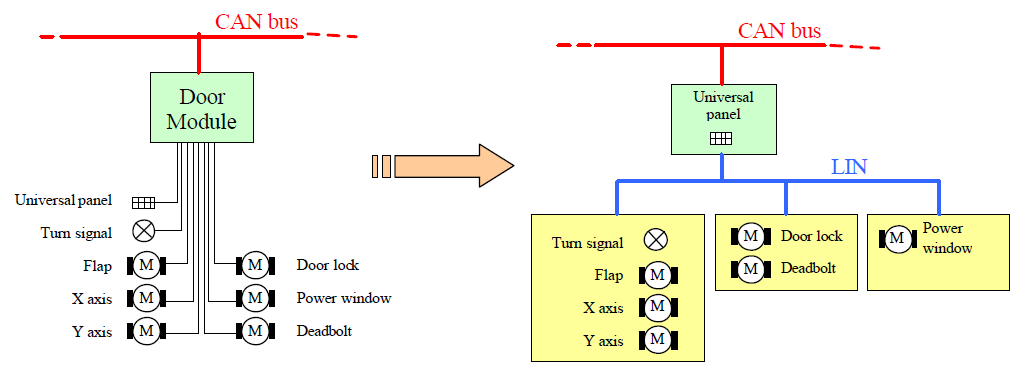
7 LIN implementation
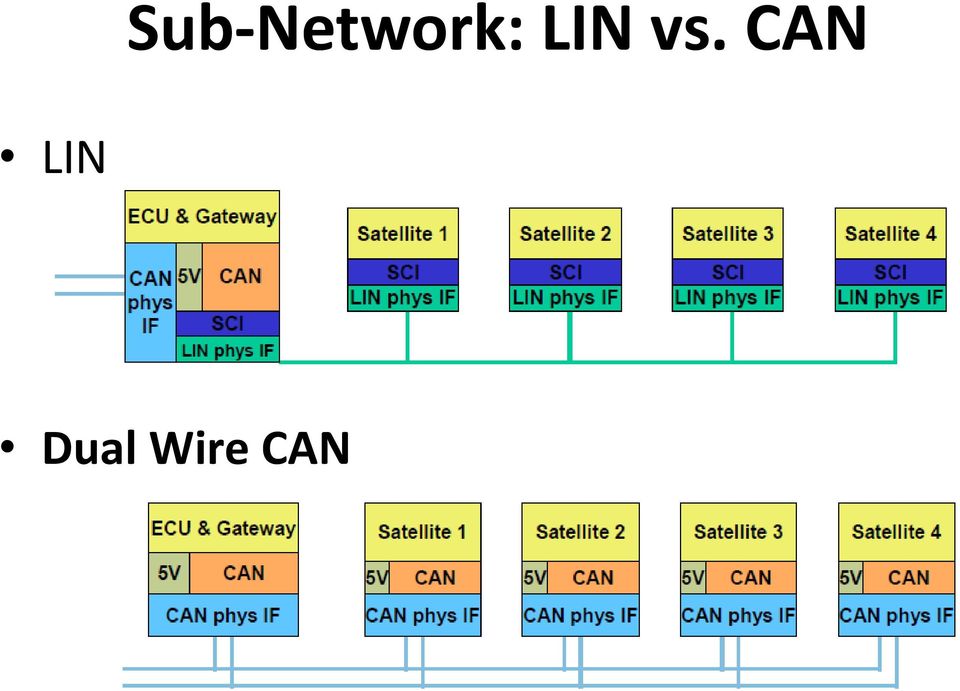
8 SubNets Necessary to reduce Busload on main Bus Solutions CAN Automotive Standard Bus Compatible with Main Bus Expensive (Die Size/ Dual Wire) Serial Sub Bus no standard Bus System not compatible with Main Bus inexpensive SCI-Based: Interface exists even on cheap devices Interface can easily be reconstructed by ASIC or CPLD


9 Sub-Network: LIN vs. CAN LIN Dual Wire CAN
10 Comparison of general features of LIN and CAN Features LIN CAN Medium access control single master multiple masters Typical bus speed 2.4, 9.6 and 19.2kbps 62,5 1000kbps Multicast message routing 6 bit identifier 11/29 bit identifier Typical size of network 2 16 nodes 4 20 nodes Data byte per frame Transmission time for 4 data bytes 6 ms at 20kbps 0.8 ms at 125kbps Error detection (data field) 8-bit checksum 15-bit CRC Physical layer single-wire, 12 V twisted-pair, 5 V Quarts/ceramic resonator master only Yes Relative cost per network connection x 0.5 x 1.0

11 LIN History LIN (Local Interconnect Network) is a cost-effective and deterministic communication system for connecting ECUs with smart sensors, actuators and controls. LIN1.0: LIN1.1: LIN1.2: LIN1.3: LIN2.0: LIN2.1: J2602: the Society of Automotive Engineers

12 Aim of LIN Open Standard Easy To Use Components available today Cheaper than CAN or J1850 A LIN bus length is limited to 40 meters and up to 16 ECUs could be connected.

13 Sub Bus Concept Basic Requirements: Satisfy Need for a Standard for Sub Busses Cost driven: The solution must be cheaper than CAN Reliability: Same Level as CAN expected Long Term Solution Logical Extension to CAN Scalable: Capability to extend Systems with additional nodes Lowering Cost of Satellite nodes: No Crystal or Resonator Easy implementation Simple State Machines Low Reaction Time (100 ms max) Predictable Worst Case Timing
 Predictable Worst Case")
14 LIN Concept Technical Solution Low cost single-wire implementation (enhanced ISO 9141) Speed up to 20Kbit/s (limited for EMI-reasons) Single Master / Multiple Slave Concept No arbitration necessary Low cost silicon implementation based on common UART/SCI interface hardware Almost any Microcontroller has necessary hardware on chip! Self synchronization without crystal or ceramics resonator in the slave nodes Significant cost reduction of hardware platform Guaranteed latency times for signal transmission (Predictability)

15 Master / Slave Protocol Master Task Determines order and priority of messages. Monitors Data and check byte and controls the error handler. Serves as a reference with its clock base (stable clock necessary) Receives Wake- Up Break from slave nodes Slave Task Is one of 2-16 members on the bus Receives or transmits data when an appropriate ID is sent by the master. The node serving as a master can be slave, too!

16 Master / Slave Protocol Master has control over the whole Bus and Protocol The master controls which message at what time is to be transferred over the bus. It also does the error handling. To accomplish this the master sends Sync Break sends Sync Byte sends ID-Field monitors Data Bytes and Check Byte, and evaluates them on consistance receives WakeUp Break from slave nodes when the bus is inactive and they request some action. serves as a reference with it s clock base (stable clock necessary)

17 Master/Slave Protocol Slave Is one of 2-16 Members on the Bus and receives or transmits Data when an appropriate ID is sent by the master. Slave snoops for ID. According to ID, slave determines what to do. either receive data or transmit data or do nothing. When transmitting the slave sends 1, 2, 4, or 8 Data Bytes sends Check-Byte The node serving as a master can be slave, too!

18 Schedule table The master task (in the master node) transmits frame headers based on a schedule table. The schedule table specifies the identifiers for each header and the interval between the start of a frame and the start of the following frame. The master application may use different schedule tables and select among them.

19 LIN protocol offers message timing predictability Time Triggered Approach Message Length is known Number of transmitted data bytes is known Minimum length can be calculated Each Message has length budget of 140% of it s minimum length maximum allowed length is known distance between beginning of two messages


20 LIN protocol offers message timing predictability Message sequence is known Master uses scheduling table Use of different scheduling tables is possible Provides Flexibility


21 Data Transmission

22 LIN Standard - Overview
23 LIN (Local Interconnect Network) Low speed serial network designed for body control in automotive applications Physical layer based on ISO 9141 (the K-line). Single wire plus ground Voltage level signaling Dominant/recessive bit levels Max 40 m wire length 1-20 kbit/s Data Link Media Access Control: Master/slave Serial asynchronous byte oriented communication UART compatible 64 uniquely identified messages Transport layer for diagnostic support Includes application layer development framework
24 Single Wire ISO 9141 Compliant LIN Physical Layer
25 Technical overview a single master and up to 16 slaves no arbitration deterministic traffic behavior and guarantees the latency times single wire Maximum data rate 20kbit byte-encoded according to the UART-protocol
26 LIN frame Synchronization break, Synchronization byte, Identifier byte, Data bytes, Ckecksum byte.
27 LIN frame A frame consists of a header (provided by the master task) and a response (provided by a slave task).
28 LIN message frame LIN message frame consists of a header and a response part. header: the SYNC-break, SYNC-field and the identifier- (ID) field
29 Synchronization break Marks the Beginning of a Message Frame consists of at least 13 bits of zeroes. the slaves are allowed to have a baud rate that differs with 15% to the masters Slave: to detect that a message is transmitted on the bus. For the master node, implemented in a microcontroller, the procedure of sending a SYNC-break involves some tampering with the UART-protocol.
30 Synchronization field Specific Pattern for Determination of Time Base master send a header, slaves synchronize their clocks every time a new message is received. Master: accurate resonator as a time reference. Slaves: synchronizes its clock from the falling edge of the start bit to the bit 7 of the SYNC-byte and divides it by 8.
31 Identifier field The slave nodes on the network are addressed by the ID- field. Message Identifier: Incorporates Information about the sender, the receiver(s), the purpose, and the Data field length. 2 Parity Bits protect the highly sensitive ID-Field. Length 6 Bits, 64 Message Identifiers are possible. 4 classes of 1/2/4/8 Data Bytes. The length coding is in the 2 LSB of the ID-Field. Each class has 16 Identifiers. ID range x00-0x1F x20-0x2F x30-0x3F Frame Length
32 Identifier The identifier field is sent by the master node to all LIN nodes This identifier normally contains one of 64 different values and includes 2 parity bits in the 8 bit data The identifier is normally associated with a collection of signals that are subsequently transmitted on the LIN bus In a specific case this can initiate SLEEP mode in the LIN slave nodes in this case no further data is transmitted on the LIN bus

33 LIN Message Frame
34 response The response contains one to eight data bytes and one checksum byte. The slave task is connected to the identifier and receives the response, verifies the checksum and uses the data transport. Messages are created when the master node sends a frame containing a header. The slave node(s) then fills the frame with data depending on the header sent from the master.
35 Data byte The data length is defined by ID5 and ID6 from the identifier field. It can be 2, 4 or 8bytes.
36 Cheksum byte The checksum (CRC) is computed only on the data field. All other fields are not included.
.")
37 LIN Communication Data from Master to Slave(s) a command frame (CMD frame). master sends a complete message frame for one ore more slaves
.")
38 LIN Communication Data from Slave to Master request frames (REQ frame). master requests a response from a specific slave (polling)

39 LIN Communication Data from Slave to Slave information sent between sensor and actuator. one slave sends its response to one or more slaves
40 Frame Synchronisation - UART Initial conditions: +/- 4% baud rate accuracy relative the transmitting source A standard transmission of data will require matched send and receiver baud rates
41 Frame Synchronisation - LIN Initial conditions: +/- 15% baud rate accuracy relative the the LIN master transmitting the synchronisation frame A synch break must be at least 13 bit periods in duration to allow for
42 Bit-Synchronisation A start bit transition to a low logic level (dominant) indicates a start of a byte, least significiant first and completing with a logic high level (resessive) bit to indicate the STOP bit
43 Bit Sampling Within a UART, clocked high speed sampling is used to aquire bit state
44 Bit-Synchronisation After recognition of a Low level in the start bit, the data is sampled at a rate 16 times the bit rate expected. The middle 3 samples must all agree for an error free reception of the data. A stop bit is expected after 1 start bit and 8 data bits in a typical message

45 LIN Physical Interface Note: The LIN specification refers to the ECU connector voltages!

46 Network Configuration LIN Concept includes configuration interface: LIN description file describes complete LIN network and also contains all information necessary to monitor the network. LIN Configuration Language Description is part of the LIN Specification and gives tools the possibility to configure the network and the nodes, diagnose the traffic, and/or simulate missing nodes.
47 The Work-flow Data Input Definition of objects Definition of relations between the objects Data Processing Logical Signal Mapping Signal Packing (Frame Editor/Frame Compiler) Timing Analysis Data Output Configuration file generation Various optional customer-defined post-operations

48 Standard API Application Programmers simplifies design of Application Code opens up the market for competition. Interface
 and LIN Application Programmer s Interface (API) The LIN API provides the embedded SW developer an abstraction from details of information transfer.")
49 LIN Database Manager (LDM) The LDM is a standalone offline tool, providing a user-friendly Windows interface for logically describing and configuring LIN systems at a high abstraction level. LIN Configuration Tool (lcfg) and LIN Application Programmer s Interface (API) The LIN API provides the embedded SW developer an abstraction from details of information transfer. Together with the LIN Configuration Tool and an optimized embedded SW package the user gets correctness and quality together with efficiency and reconfiguration flexibility. LINspector a highly flexible tool for testing and verifying communication for compliance with the LIN standard. LIN Tools by VCT
50 ~ END ~
www.imprezer.tk Introduction to www.union88.tk RACE FUELS Hans-Christian von der Wense Munich, Germany
 Introduction to Hans-Christian von der Wense Munich, Germany Overview Progress in Automotive Electronics and it s Impacts on Networking LIN Consortium LIN Concept Physical Layer Data Link Layer LIN Network
Introduction to Hans-Christian von der Wense Munich, Germany Overview Progress in Automotive Electronics and it s Impacts on Networking LIN Consortium LIN Concept Physical Layer Data Link Layer LIN Network
LIN (Local Interconnect Network):
:") LIN (Local Interconnect Network): History: LIN (Local Interconnect Network) was developed as cost-effective alternate to CAN protocol. In 1998 a group of companies including Volvo, Motorola, Audi, BMW,
LIN (Local Interconnect Network): History: LIN (Local Interconnect Network) was developed as cost-effective alternate to CAN protocol. In 1998 a group of companies including Volvo, Motorola, Audi, BMW,
Introduction to. LIN (Local Interconnect Network)
") Introduction to LIN (Local Interconnect Network) Stéphane REY Revision 1.0 - ay 13 th, 2003 Table of content 1 INTRODUCTION...3 1.1 PURPOSE OF THE DOCUENT...3 1.2 ACRONYOUS...3 1.3 RELATED DOCUENTS...3
Introduction to LIN (Local Interconnect Network) Stéphane REY Revision 1.0 - ay 13 th, 2003 Table of content 1 INTRODUCTION...3 1.1 PURPOSE OF THE DOCUENT...3 1.2 ACRONYOUS...3 1.3 RELATED DOCUENTS...3
Local Interconnect Network Training. Local Interconnect Network Training. Overview
 Overview Local Interconnect Network Training History and introduction Technical features The ISO/OSI reference model and LIN Frames Message Frames Communication concept of LIN Command Frames and Extended
Overview Local Interconnect Network Training History and introduction Technical features The ISO/OSI reference model and LIN Frames Message Frames Communication concept of LIN Command Frames and Extended
LOCAL INTERCONNECT NETWORK (LIN)
") 54B-1 GROUP 54B LOCAL INTERCONNECT NETWORK (LIN) CONTENTS GENERAL INFORMATION........ 54B-2............ 54B-3 STRUCTURE................... 54B-2 54B-2 LIN refers to "Local Interconnect Network," which
54B-1 GROUP 54B LOCAL INTERCONNECT NETWORK (LIN) CONTENTS GENERAL INFORMATION........ 54B-2............ 54B-3 STRUCTURE................... 54B-2 54B-2 LIN refers to "Local Interconnect Network," which
Microcomputer Protocol Implementation at Local Interconnect Network Georgi Krastev
 Microcomputer Protocol Implementation at Local Interconnect Network Georgi Krastev Abstract: The paper discusses the issues of microcomputer protocol implementation at local interconnect network for automobile
Microcomputer Protocol Implementation at Local Interconnect Network Georgi Krastev Abstract: The paper discusses the issues of microcomputer protocol implementation at local interconnect network for automobile
LIN. Specification Package. Revision 2.0. This specification is provided on an "AS IS" basis only and cannot be the basis for any claims.
 LIN Specification Package September 23, 2003; Page 1 LIN Specification Package This specification is provided on an "AS IS" basis only and cannot be the basis for any claims. LIN Consortium, 2003. All
LIN Specification Package September 23, 2003; Page 1 LIN Specification Package This specification is provided on an "AS IS" basis only and cannot be the basis for any claims. LIN Consortium, 2003. All
Introduction to LIN. Webinar
 Introduction to LIN Webinar V2.2.07 2014-03-03 Agenda > Information 4 Overview 6 LIN Workflow 9 LIN Physical Layer 12 LIN Communication 14 Synchronization of the LIN nodes 16 LIN Message & Scheduling 19
Introduction to LIN Webinar V2.2.07 2014-03-03 Agenda > Information 4 Overview 6 LIN Workflow 9 LIN Physical Layer 12 LIN Communication 14 Synchronization of the LIN nodes 16 LIN Message & Scheduling 19
LOW COST AUTOMOTIVE NETWORKS. Local Interconnect Network (LIN)
") LOW COST AUTOMOTIVE NETWORKS Local Interconnect Network (LIN) TTP/A 1 J. Kaiser, IVS-EOS Cost-Performance Trade-off! 2 J. Kaiser, IVS-EOS LIN (Local Interconnect Network)! LIN Specification Package, Revision
LOW COST AUTOMOTIVE NETWORKS Local Interconnect Network (LIN) TTP/A 1 J. Kaiser, IVS-EOS Cost-Performance Trade-off! 2 J. Kaiser, IVS-EOS LIN (Local Interconnect Network)! LIN Specification Package, Revision
Bluetooth in Automotive Applications Lars-Berno Fredriksson, KVASER AB
 Bluetooth in Automotive Applications Lars-Berno Fredriksson, KVASER AB ABSTRACT There is a potential for 50-400 million per year Bluetooth nodes within the car market if Bluetooth can be integrated into
Bluetooth in Automotive Applications Lars-Berno Fredriksson, KVASER AB ABSTRACT There is a potential for 50-400 million per year Bluetooth nodes within the car market if Bluetooth can be integrated into
In-Vehicular Communication Networking Protocol
 In-Vehicular Communication Networking Protocol ABSTRACT Renu Sharma Indiana University, Purdue University Indianapolis, IN [email protected] Today s modern vehicles contain a complex symbiosis of intelligent
In-Vehicular Communication Networking Protocol ABSTRACT Renu Sharma Indiana University, Purdue University Indianapolis, IN [email protected] Today s modern vehicles contain a complex symbiosis of intelligent
LIN (Local Interconnected Network)
") Slide 1 LIN (Local Interconnected Network) Fundamentals of the LIN Protocol Ralf Schwering,, Software Development Engineer Vector Informatik GmbH www.lin-subbus.org -1- Slide 2 Agenda Communication Principle
Slide 1 LIN (Local Interconnected Network) Fundamentals of the LIN Protocol Ralf Schwering,, Software Development Engineer Vector Informatik GmbH www.lin-subbus.org -1- Slide 2 Agenda Communication Principle
Elettronica dei Sistemi Digitali Costantino Giaconia SERIAL I/O COMMON PROTOCOLS
 SERIAL I/O COMMON PROTOCOLS RS-232 Fundamentals What is RS-232 RS-232 is a popular communications interface for connecting modems and data acquisition devices (i.e. GPS receivers, electronic balances,
SERIAL I/O COMMON PROTOCOLS RS-232 Fundamentals What is RS-232 RS-232 is a popular communications interface for connecting modems and data acquisition devices (i.e. GPS receivers, electronic balances,
K-line Communication Description
 K-line Communication Description Introduction There are two primary ISO documents that describe how to perform OBD communications on K- line between a tester and a vehicle. There are actually several ISO
K-line Communication Description Introduction There are two primary ISO documents that describe how to perform OBD communications on K- line between a tester and a vehicle. There are actually several ISO
Automotive electronics CAN and LIN buses. Copyright 2006 Matrix Multimedia Limited
 Automotive electronics CAN and LIN buses Copyright 2006 atrix ultimedia Limited About this presentation This presentation was developed by John Dobson anaging Director of atrix ultimedia Limited. PowerPoint
Automotive electronics CAN and LIN buses Copyright 2006 atrix ultimedia Limited About this presentation This presentation was developed by John Dobson anaging Director of atrix ultimedia Limited. PowerPoint
Adaptive Cruise Control System Overview
 5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
Serial Communications
 April 2014 7 Serial Communications Objectives - To be familiar with the USART (RS-232) protocol. - To be able to transfer data from PIC-PC, PC-PIC and PIC-PIC. - To test serial communications with virtual
April 2014 7 Serial Communications Objectives - To be familiar with the USART (RS-232) protocol. - To be able to transfer data from PIC-PC, PC-PIC and PIC-PIC. - To test serial communications with virtual
LOCAL INTERCONNECT NETWORK (LIN)
") 54B-1 GROUP 54B LOCAL INTERCONNECT NETWORK (LIN) CONTENTS SPECIAL TOOLS................ 54B-2............ 54B-3 DIAGNOSIS CODE CHART............ 54B-3 DIAGNOSIS FUNCTION............... 54B-4 DIAGNOSIS
54B-1 GROUP 54B LOCAL INTERCONNECT NETWORK (LIN) CONTENTS SPECIAL TOOLS................ 54B-2............ 54B-3 DIAGNOSIS CODE CHART............ 54B-3 DIAGNOSIS FUNCTION............... 54B-4 DIAGNOSIS
Industrial Networks & Databases
 Industrial Networks & Databases LONWORKS KNX 1 HVAC and BEMS HVAC - Heating, Ventilation & Air Conditioning BEMS - Building & Energy Management Systems 2 3 4 LONWORKS (Local Operating Networks) Open solution
Industrial Networks & Databases LONWORKS KNX 1 HVAC and BEMS HVAC - Heating, Ventilation & Air Conditioning BEMS - Building & Energy Management Systems 2 3 4 LONWORKS (Local Operating Networks) Open solution
Comparison of FlexRay and CAN-bus for Real-Time Communication
 Comparison of FlexRay and CAN-bus for Real-Time Communication Andreas Forsberg Mälardalen University Högskoleplan 1 721 23 Västerås +46 768011236 [email protected] Johan Hedberg Mälardalen University
Comparison of FlexRay and CAN-bus for Real-Time Communication Andreas Forsberg Mälardalen University Högskoleplan 1 721 23 Västerås +46 768011236 [email protected] Johan Hedberg Mälardalen University
Industrial Networks & Databases
 Industrial Networks & Databases - Device Bus - - Field Bus - - Data Bus - Recall An Industrial Communication Network (control network) - any group of devices (computers, controllers, meters etc.) working
Industrial Networks & Databases - Device Bus - - Field Bus - - Data Bus - Recall An Industrial Communication Network (control network) - any group of devices (computers, controllers, meters etc.) working
Develop a Dallas 1-Wire Master Using the Z8F1680 Series of MCUs
 Develop a Dallas 1-Wire Master Using the Z8F1680 Series of MCUs AN033101-0412 Abstract This describes how to interface the Dallas 1-Wire bus with Zilog s Z8F1680 Series of MCUs as master devices. The Z8F0880,
Develop a Dallas 1-Wire Master Using the Z8F1680 Series of MCUs AN033101-0412 Abstract This describes how to interface the Dallas 1-Wire bus with Zilog s Z8F1680 Series of MCUs as master devices. The Z8F0880,
In-Vehicle Networking freescale.com/automotive
 LIN/CAN/RF/FlexRay Technology In-Vehicle Networking freescale.com/automotive In-Vehicle Networking As an industry leader in automotive solutions, Freescale Semiconductor has greatly contributed to in-vehicle
LIN/CAN/RF/FlexRay Technology In-Vehicle Networking freescale.com/automotive In-Vehicle Networking As an industry leader in automotive solutions, Freescale Semiconductor has greatly contributed to in-vehicle
EBERSPÄCHER ELECTRONICS automotive bus systems. solutions for network analysis
 EBERSPÄCHER ELECTRONICS automotive bus systems solutions for network analysis DRIVING THE MOBILITY OF TOMORROW 2 AUTOmotive bus systems System Overview Analyzing Networks in all Development Phases Control
EBERSPÄCHER ELECTRONICS automotive bus systems solutions for network analysis DRIVING THE MOBILITY OF TOMORROW 2 AUTOmotive bus systems System Overview Analyzing Networks in all Development Phases Control
DeviceNet Communication Manual
 DeviceNet Communication Manual Soft-Starter Series: SSW-07/SSW-08 Language: English Document: 10000046963 / 00 03/2008 Summary ABOUT THIS MANUAL... 5 ABBREVIATIONS AND DEFINITIONS... 5 NUMERICAL REPRESENTATION...
DeviceNet Communication Manual Soft-Starter Series: SSW-07/SSW-08 Language: English Document: 10000046963 / 00 03/2008 Summary ABOUT THIS MANUAL... 5 ABBREVIATIONS AND DEFINITIONS... 5 NUMERICAL REPRESENTATION...
LOCAL INTERCONNECT NETWORK (LIN)
") 54B-1 GROUP 54B LOCAL INTERCONNECT NETWORK (LIN) CONTENTS GENERAL INFORMATION 54B-2 SPECIAL TOOLS 54B-3 54B-4 DIAGNOSIS FUNCTION 54B-4 DIAGNOSTIC TROUBLE CODE CHART 54B-5 DIAGNOSTIC TROUBLE CODE PROCEDURES
54B-1 GROUP 54B LOCAL INTERCONNECT NETWORK (LIN) CONTENTS GENERAL INFORMATION 54B-2 SPECIAL TOOLS 54B-3 54B-4 DIAGNOSIS FUNCTION 54B-4 DIAGNOSTIC TROUBLE CODE CHART 54B-5 DIAGNOSTIC TROUBLE CODE PROCEDURES
RS-485 Protocol Manual
 RS-485 Protocol Manual Revision: 1.0 January 11, 2000 RS-485 Protocol Guidelines and Description Page i Table of Contents 1.0 COMMUNICATIONS BUS OVERVIEW... 1 2.0 DESIGN GUIDELINES... 1 2.1 Hardware Design
RS-485 Protocol Manual Revision: 1.0 January 11, 2000 RS-485 Protocol Guidelines and Description Page i Table of Contents 1.0 COMMUNICATIONS BUS OVERVIEW... 1 2.0 DESIGN GUIDELINES... 1 2.1 Hardware Design
Automotive Communication Network Trends
 Automotive Communication Network Trends Renesas Electronics America Inc. Renesas Technology & Solution Portfolio 2 Microcontroller and Microprocessor Line-up 2010 2012 32-bit 1200 DMIPS, Superscalar Automotive
Automotive Communication Network Trends Renesas Electronics America Inc. Renesas Technology & Solution Portfolio 2 Microcontroller and Microprocessor Line-up 2010 2012 32-bit 1200 DMIPS, Superscalar Automotive
imc BUSDAQ autonomous intelligent synchronized Field bus data acquisition - from stationary to mobile imc productive testing
 imc BUSDAQ autonomous intelligent synchronized Field bus data acquisition - from stationary to mobile imc productive testing www.imc-berlin.com/busdaq imc BUSDAQ/BUSLOG at a glance Processes multiple networks
imc BUSDAQ autonomous intelligent synchronized Field bus data acquisition - from stationary to mobile imc productive testing www.imc-berlin.com/busdaq imc BUSDAQ/BUSLOG at a glance Processes multiple networks
Tutorial. www.ccontrols.com
 Tutorial 1 Tutorial CONTROLLER AREA NETWORK CAN was designed by Bosch and is currently described by ISO 11898 1. In terms of the Open Systems Interconnection model (OSI), CAN partially defines the services
Tutorial 1 Tutorial CONTROLLER AREA NETWORK CAN was designed by Bosch and is currently described by ISO 11898 1. In terms of the Open Systems Interconnection model (OSI), CAN partially defines the services
SPI I2C LIN Ethernet. u Today: Wired embedded networks. u Next lecture: CAN bus u Then: 802.15.4 wireless embedded network
 u Today: Wired embedded networks Ø Characteristics and requirements Ø Some embedded LANs SPI I2C LIN Ethernet u Next lecture: CAN bus u Then: 802.15.4 wireless embedded network Network from a High End
u Today: Wired embedded networks Ø Characteristics and requirements Ø Some embedded LANs SPI I2C LIN Ethernet u Next lecture: CAN bus u Then: 802.15.4 wireless embedded network Network from a High End
How To Communicate With A Token Ring Network (Dihon)
") Token us Token -procedure: Only someone who possesses a certain ken (= bit sequence), may send. One example for a ken network: IEEE 80. Token us All stations should be treated equally, i.e. they have pass
Token us Token -procedure: Only someone who possesses a certain ken (= bit sequence), may send. One example for a ken network: IEEE 80. Token us All stations should be treated equally, i.e. they have pass
Single channel data transceiver module WIZ2-434
 Single channel data transceiver module WIZ2-434 Available models: WIZ2-434-RS: data input by RS232 (±12V) logic, 9-15V supply WIZ2-434-RSB: same as above, but in a plastic shell. The WIZ2-434-x modules
Single channel data transceiver module WIZ2-434 Available models: WIZ2-434-RS: data input by RS232 (±12V) logic, 9-15V supply WIZ2-434-RSB: same as above, but in a plastic shell. The WIZ2-434-x modules
PEMS Conference. Acquiring Data from In-Vehicle Networks. Rick Walter, P.E. HEM Data Corporation
 PEMS Conference Acquiring Data from In-Vehicle Networks Rick Walter, P.E. HEM Data Corporation Acquiring Data from In-Vehicle Networks Topics Overview/Benefits Heavy Duty J1939 protocol Available J1939
PEMS Conference Acquiring Data from In-Vehicle Networks Rick Walter, P.E. HEM Data Corporation Acquiring Data from In-Vehicle Networks Topics Overview/Benefits Heavy Duty J1939 protocol Available J1939
ARM Thumb Microcontrollers. Application Note. Software ISO 7816 I/O Line Implementation. Features. Introduction
 Software ISO 7816 I/O Line Implementation Features ISO 7816-3 compliant (direct convention) Byte reception and transmission with parity check Retransmission on error detection Automatic reception at the
Software ISO 7816 I/O Line Implementation Features ISO 7816-3 compliant (direct convention) Byte reception and transmission with parity check Retransmission on error detection Automatic reception at the
Road Vehicles - Diagnostic Systems
 SSF 14230 Road Vehicles - Diagnostic Systems Keyword Protocol 2000 - Part 1 - Physical Layer Swedish Implementation Standard Document: SSF 14230-1 Status: Issue 3 Date: October 22, 1997 This document is
SSF 14230 Road Vehicles - Diagnostic Systems Keyword Protocol 2000 - Part 1 - Physical Layer Swedish Implementation Standard Document: SSF 14230-1 Status: Issue 3 Date: October 22, 1997 This document is
TD-03011E. Identifier Usage in CANopen Networks
 Identifier Usage in CANopen Networks Author : U. Koppe Published : January 2003 This document describes the usage of identifiers in CANopen networks. The paper is intended for CANopen newcomers and system
Identifier Usage in CANopen Networks Author : U. Koppe Published : January 2003 This document describes the usage of identifiers in CANopen networks. The paper is intended for CANopen newcomers and system
OSI Layers in Automotive Networks
 OSI Layers in Automotive Networks 2013-03-20 IEEE 802.1 Plenary Meeting - Orlando Aboubacar Diarra, Robert Bosch GmbH 1 Outline OSI Reference Model Simplified generic Architecture for Automotive Serial
OSI Layers in Automotive Networks 2013-03-20 IEEE 802.1 Plenary Meeting - Orlando Aboubacar Diarra, Robert Bosch GmbH 1 Outline OSI Reference Model Simplified generic Architecture for Automotive Serial
COMPUTER HARDWARE. Input- Output and Communication Memory Systems
 COMPUTER HARDWARE Input- Output and Communication Memory Systems Computer I/O I/O devices commonly found in Computer systems Keyboards Displays Printers Magnetic Drives Compact disk read only memory (CD-ROM)
COMPUTER HARDWARE Input- Output and Communication Memory Systems Computer I/O I/O devices commonly found in Computer systems Keyboards Displays Printers Magnetic Drives Compact disk read only memory (CD-ROM)
Serial Communications / Protocol in AirTest Products
 Serial Communications / Protocol in AirTest Products General The standard sensor has two different ways of serial communication with sensor s peripherals and the outside world. One is through the UART
Serial Communications / Protocol in AirTest Products General The standard sensor has two different ways of serial communication with sensor s peripherals and the outside world. One is through the UART
Customer Experience. Silicon. Support & Professional Eng. Services. Freescale Provided SW & Solutions
 September 2013 Silicon Support & Professional Eng. Services Customer Experience Freescale Provided SW & Solutions Provide Valued Software, Support & Professional Engineering Services, Competitively 2 Customer
September 2013 Silicon Support & Professional Eng. Services Customer Experience Freescale Provided SW & Solutions Provide Valued Software, Support & Professional Engineering Services, Competitively 2 Customer
OBD ll Vehicle Communications. OBD2training.com
 OBD ll Vehicle Communications by Steve Caruso This presentation is going review CAN communications and cover 4 case studies of high speed CAN communication error. These types of failures can be applied
OBD ll Vehicle Communications by Steve Caruso This presentation is going review CAN communications and cover 4 case studies of high speed CAN communication error. These types of failures can be applied
Dolphin In-Circuit programming Updating Firmware in the field
 Dolphin In-Circuit programming Updating Firmware in the field 1 Introduction In systems e.g. gateways, where an external microcontroller is connected to a Dolphin based product like a TCM300 it might be
Dolphin In-Circuit programming Updating Firmware in the field 1 Introduction In systems e.g. gateways, where an external microcontroller is connected to a Dolphin based product like a TCM300 it might be
Serial Communications
 Serial Communications 1 Serial Communication Introduction Serial communication buses Asynchronous and synchronous communication UART block diagram UART clock requirements Programming the UARTs Operation
Serial Communications 1 Serial Communication Introduction Serial communication buses Asynchronous and synchronous communication UART block diagram UART clock requirements Programming the UARTs Operation
Data Exchange On The CAN Bus I
 Service. Self-Study Programme 238 Data Exchange On The CAN Bus I Basics The CAN bus system in a car interlinks the control units to form a network. This produces new functions in the car and in diagnostics
Service. Self-Study Programme 238 Data Exchange On The CAN Bus I Basics The CAN bus system in a car interlinks the control units to form a network. This produces new functions in the car and in diagnostics
AUTOMOTIVE FIELDBUS TECHNOLOGY: DEVELOPMENT TOOLS AND ELECTRONIC EQUIPMENT FOR LABORATORY PRACTICES
 AUTOMOTIVE FIELDBUS TECHNOLOGY: DEVELOPMENT TOOLS AND ELECTRONIC EQUIPMENT FOR LABORATORY PRACTICES S. OTERO, F. POZA, M. A. DOMÍNGUEZ AND P. MARIÑO Electronic Technology Department. University of Vigo.
AUTOMOTIVE FIELDBUS TECHNOLOGY: DEVELOPMENT TOOLS AND ELECTRONIC EQUIPMENT FOR LABORATORY PRACTICES S. OTERO, F. POZA, M. A. DOMÍNGUEZ AND P. MARIÑO Electronic Technology Department. University of Vigo.
Tutorial Introduction
 Tutorial Introduction PURPOSE: This tutorial describes concepts related to communication busses, including attributes, functions, and the different types of bus systems. The intent is to provide a baseline
Tutorial Introduction PURPOSE: This tutorial describes concepts related to communication busses, including attributes, functions, and the different types of bus systems. The intent is to provide a baseline
UART-based LIN-bus Support for Linux with SocketCAN Interface
 UART-based LIN-bus Support for Linux with SocketCAN Interface Pavel Píša 1 [email protected] Rostislav Lisový 1 [email protected] Oliver Hartkopp 2 [email protected] Michal Sojka 1 [email protected]
UART-based LIN-bus Support for Linux with SocketCAN Interface Pavel Píša 1 [email protected] Rostislav Lisový 1 [email protected] Oliver Hartkopp 2 [email protected] Michal Sojka 1 [email protected]
The SAE J1939 Communications Network
 The SAE J939 Communications Network An overview of the J939 family of standards and how they are used An SAE White Paper Since its publication more than a decade ago, SAE J939 has become widely accepted
The SAE J939 Communications Network An overview of the J939 family of standards and how they are used An SAE White Paper Since its publication more than a decade ago, SAE J939 has become widely accepted
Documentation. M-Bus 130-mbx
 Documentation M-Bus 130-mbx Introduction The mx M-Bus module is part of the mx Smart Slot communications family. With the integrated SmartSlot technology, mx systems ag offers automatic consumer data read-out
Documentation M-Bus 130-mbx Introduction The mx M-Bus module is part of the mx Smart Slot communications family. With the integrated SmartSlot technology, mx systems ag offers automatic consumer data read-out
Process Control and Automation using Modbus Protocol
 Process Control and Automation using Modbus Protocol Modbus is the fundamental network protocol used in most industrial applications today. It is universal, open and an easy to use protocol. Modbus has
Process Control and Automation using Modbus Protocol Modbus is the fundamental network protocol used in most industrial applications today. It is universal, open and an easy to use protocol. Modbus has
RN-131-PICTAIL & RN-171-PICTAIL Evaluation Boards
 RN-131-PICTAIL & RN-171-PICTAIL Evaluation Boards 2012 Roving Networks. All rights reserved. Version 1.0 9/7/2012 USER MANUAL OVERVIEW The RN-131 and RN-171 WiFly radio modules are complete, standalone
RN-131-PICTAIL & RN-171-PICTAIL Evaluation Boards 2012 Roving Networks. All rights reserved. Version 1.0 9/7/2012 USER MANUAL OVERVIEW The RN-131 and RN-171 WiFly radio modules are complete, standalone
Vorlesung Kommunikationsnetze Fieldbus Systems
 Vorlesung Kommunikationsnetze Fieldbus Systems Prof. Dr. H. P. Großmann mit B. Wiegel sowie A. Schmeiser und M. Rabel Sommersemester 2009 Institut für Organisation und Management von Informationssystemen
Vorlesung Kommunikationsnetze Fieldbus Systems Prof. Dr. H. P. Großmann mit B. Wiegel sowie A. Schmeiser und M. Rabel Sommersemester 2009 Institut für Organisation und Management von Informationssystemen
Hello, and welcome to this presentation of the STM32L4 reset and clock controller.
 Hello, and welcome to this presentation of the STM32L4 reset and clock controller. 1 The STM32L4 reset and clock controller manages system and peripheral clocks. STM32L4 devices embed three internal oscillators,
Hello, and welcome to this presentation of the STM32L4 reset and clock controller. 1 The STM32L4 reset and clock controller manages system and peripheral clocks. STM32L4 devices embed three internal oscillators,
Laboratory Course Industrial Automation. Experiment Nr. 6. Introduction to the FlexRay bus system. Brief User Guide IAS Demonstrator Go-Cart
 Universität Stuttgart Institut für Automatisierungs- und Softwaretechnik Prof. Dr.-Ing. M. Weyrich Laboratory Course Industrial Automation Experiment Nr. 6 Introduction to the FlexRay bus system Brief
Universität Stuttgart Institut für Automatisierungs- und Softwaretechnik Prof. Dr.-Ing. M. Weyrich Laboratory Course Industrial Automation Experiment Nr. 6 Introduction to the FlexRay bus system Brief
Subnetting,Supernetting, VLSM & CIDR
 Subnetting,Supernetting, VLSM & CIDR WHAT - IP Address Unique 32 or 128 bit Binary, used to identify a system on a Network or Internet. Network Portion Host Portion CLASSFULL ADDRESSING IP address space
Subnetting,Supernetting, VLSM & CIDR WHAT - IP Address Unique 32 or 128 bit Binary, used to identify a system on a Network or Internet. Network Portion Host Portion CLASSFULL ADDRESSING IP address space
KIBES Body and Chassis Control. Multiplex system for commercial vehicles. www.continental-automotive.com/kibes
 KIBES Body and Chassis Control Multiplex system for commercial vehicles www.continental-automotive.com/kibes KIBES Key to Integrated onboard Electronic System 3 KIBES Key to Integrated onboard Electronic
KIBES Body and Chassis Control Multiplex system for commercial vehicles www.continental-automotive.com/kibes KIBES Key to Integrated onboard Electronic System 3 KIBES Key to Integrated onboard Electronic
GE Power Controls FIELDBUS APPENDIX PROFIBUS DP. Doc. No.: ASTAT Plus PB_Appendix-v0
 GE Power Controls = FIELDBUS APPENDIX PROFIBUS DP = Doc. No.: ASTAT Plus PB_Appendix-v0 Fieldbus Appendix: PROFIBUS DP 1 Fieldbus Introduction...... 2 1.1 Introduction to Profibus-DP... 2 1.2 Network Overview...
GE Power Controls = FIELDBUS APPENDIX PROFIBUS DP = Doc. No.: ASTAT Plus PB_Appendix-v0 Fieldbus Appendix: PROFIBUS DP 1 Fieldbus Introduction...... 2 1.1 Introduction to Profibus-DP... 2 1.2 Network Overview...
SafeSPI - Serial Peripheral Interface for Automotive Safety
 Page 1 / 16 SafeSPI - Serial Peripheral Interface for Automotive Safety Technical SafeSPI_specification_v0.15_published.doc 30 July 2015 Page 2 / 16 1 INTRODUCTION 3 1.1 Requirement specification types
Page 1 / 16 SafeSPI - Serial Peripheral Interface for Automotive Safety Technical SafeSPI_specification_v0.15_published.doc 30 July 2015 Page 2 / 16 1 INTRODUCTION 3 1.1 Requirement specification types
DS1721 2-Wire Digital Thermometer and Thermostat
 www.dalsemi.com FEATURES Temperature measurements require no external components with ±1 C accuracy Measures temperatures from -55 C to +125 C; Fahrenheit equivalent is -67 F to +257 F Temperature resolution
www.dalsemi.com FEATURES Temperature measurements require no external components with ±1 C accuracy Measures temperatures from -55 C to +125 C; Fahrenheit equivalent is -67 F to +257 F Temperature resolution
Standardized software components will help in mastering the. software should be developed for FlexRay were presented at
 Embedded Software for FlexRay Systems Special aspects and benefits of implementing modularized software Standardized software components will help in mastering the growing complexity of the interplay of
Embedded Software for FlexRay Systems Special aspects and benefits of implementing modularized software Standardized software components will help in mastering the growing complexity of the interplay of
LOCAL INTERCONNECT NETWORK (LIN)
") 54C-1 GROUP 54C LOCAL INTERCONNECT NETWORK (LIN) CONTENTS GENERAL INFORMATION...54C-2 SPECIAL TOOL...54C-3...54C-4 DIAGNOSTIC FUNCTION...54C-4 DIAGNOSTIC TROUBLE CODE CHART...54C-6 DIAGNOSTIC TROUBLE CODE
54C-1 GROUP 54C LOCAL INTERCONNECT NETWORK (LIN) CONTENTS GENERAL INFORMATION...54C-2 SPECIAL TOOL...54C-3...54C-4 DIAGNOSTIC FUNCTION...54C-4 DIAGNOSTIC TROUBLE CODE CHART...54C-6 DIAGNOSTIC TROUBLE CODE
Computer Network. Interconnected collection of autonomous computers that are able to exchange information
 Introduction Computer Network. Interconnected collection of autonomous computers that are able to exchange information No master/slave relationship between the computers in the network Data Communications.
Introduction Computer Network. Interconnected collection of autonomous computers that are able to exchange information No master/slave relationship between the computers in the network Data Communications.
Implementing SPI Master and Slave Functionality Using the Z8 Encore! F083A
 Application Note Implementing SPI Master and Slave Functionality Using the Z8 Encore! F083A AN026701-0308 Abstract This application note demonstrates a method of implementing the Serial Peripheral Interface
Application Note Implementing SPI Master and Slave Functionality Using the Z8 Encore! F083A AN026701-0308 Abstract This application note demonstrates a method of implementing the Serial Peripheral Interface
MOST Technology... 3. MOST Multimedia Network... 3. Data Transport... 5. Optical Bus... 6 Optical Transmitter... 6 Optical Receiver...
 Table of Contents Subject Page MOST Technology... 3 MOST Multimedia Network... 3 Data Transport... 5 Optical Bus... 6 Optical Transmitter... 6 Optical Receiver... 6 Control Unit Connections... 7 Interfaces...
Table of Contents Subject Page MOST Technology... 3 MOST Multimedia Network... 3 Data Transport... 5 Optical Bus... 6 Optical Transmitter... 6 Optical Receiver... 6 Control Unit Connections... 7 Interfaces...
Design of a High Speed Communications Link Using Field Programmable Gate Arrays
 Customer-Authored Application Note AC103 Design of a High Speed Communications Link Using Field Programmable Gate Arrays Amy Lovelace, Technical Staff Engineer Alcatel Network Systems Introduction A communication
Customer-Authored Application Note AC103 Design of a High Speed Communications Link Using Field Programmable Gate Arrays Amy Lovelace, Technical Staff Engineer Alcatel Network Systems Introduction A communication
Using Xbee 802.15.4 in Serial Communication
 Using Xbee 802.15.4 in Serial Communication Jason Grimes April 2, 2010 Abstract Instances where wireless serial communication is required to connect devices, Xbee RF modules are effective in linking Universal
Using Xbee 802.15.4 in Serial Communication Jason Grimes April 2, 2010 Abstract Instances where wireless serial communication is required to connect devices, Xbee RF modules are effective in linking Universal
Welcome to the Introduction to Controller Area Network web seminar My name is William Stuart, and I am a Applications Engineer for the Automotive
 Welcome to the Introduction to Controller Area Network web seminar My name is William Stuart, and I am a Applications Engineer for the Automotive Products Group within Microchip. This web seminar today
Welcome to the Introduction to Controller Area Network web seminar My name is William Stuart, and I am a Applications Engineer for the Automotive Products Group within Microchip. This web seminar today
LOCAL INTERCONNECT NETWORK (LIN)
") 54B-1 GROUP 54B LOCAL INTERCONNECT NETWORK (LIN) CONTENTS GENERAL INFORMATION 54B-2 SPECIAL TOOLS 54B-3 54B-4 DIAGNOSIS FUNCTION 54B-4 DIAGNOSTIC TROUBLE CODE CHART 54B-6 DIAGNOSTIC TROUBLE CODE PROCEDURES
54B-1 GROUP 54B LOCAL INTERCONNECT NETWORK (LIN) CONTENTS GENERAL INFORMATION 54B-2 SPECIAL TOOLS 54B-3 54B-4 DIAGNOSIS FUNCTION 54B-4 DIAGNOSTIC TROUBLE CODE CHART 54B-6 DIAGNOSTIC TROUBLE CODE PROCEDURES
Bus Data Acquisition and Remote Monitoring System Using Gsm & Can
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 8, Issue 3 (Nov. - Dec. 2013), PP 88-92 Bus Data Acquisition and Remote Monitoring System
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 8, Issue 3 (Nov. - Dec. 2013), PP 88-92 Bus Data Acquisition and Remote Monitoring System
Industrial Networks & Databases. Protocols and Networks - Device Bus - - Field Bus -
 Industrial Networks & Databases - Device Bus - - Field Bus - - Data Bus - Recall An Industrial Communication Network (control network) - any group of devices (computers, controllers, meters etc.) working
Industrial Networks & Databases - Device Bus - - Field Bus - - Data Bus - Recall An Industrial Communication Network (control network) - any group of devices (computers, controllers, meters etc.) working
In-Vehicle Networking
 In-Vehicle Networking B.K.Ramesh, K. Srirama Murthy Dearborn Electronics ABSTRACT Today s vehicles include a complex symbiosis of intelligent electronic systems and integrated mechanical structures. Today,
In-Vehicle Networking B.K.Ramesh, K. Srirama Murthy Dearborn Electronics ABSTRACT Today s vehicles include a complex symbiosis of intelligent electronic systems and integrated mechanical structures. Today,
Protocols for Wired and Wireless Networks in Vehicle Systems
 Protocols for Wired and Wireless Networks in Vehicle Systems Syed Masud Mahmud, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 Copyright 2002 by Syed Masud Mahmud Email:
Protocols for Wired and Wireless Networks in Vehicle Systems Syed Masud Mahmud, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 Copyright 2002 by Syed Masud Mahmud Email:
SMS based remote control system
 EE 318 Electronics Design Project Report, EE Department, IIT Bombay, April 2006 SMS based remote control system Ashish Deswal ( 03007020 ) Shaleen Harlalka ( 03007015 ) Arjun Arikeri ( 03007032 ) Ashish
EE 318 Electronics Design Project Report, EE Department, IIT Bombay, April 2006 SMS based remote control system Ashish Deswal ( 03007020 ) Shaleen Harlalka ( 03007015 ) Arjun Arikeri ( 03007032 ) Ashish
DeviceNet Bus Software Help for Programming an Allen Bradley Control System
 FBP FieldBusPlug V7 DeviceNet Bus Software Help for Programming an Allen Bradley Control System DeviceNet Software Help for Programming an Allen Bradley Control System Contents Page General Purpose...
FBP FieldBusPlug V7 DeviceNet Bus Software Help for Programming an Allen Bradley Control System DeviceNet Software Help for Programming an Allen Bradley Control System Contents Page General Purpose...
FlexRay A Communications Network for Automotive Control Systems
 FlexRay A Communications Network for Automotive Control Systems WFCS 2006 Rainer Makowitz Automotive Systems Engineering, EMEA Freescale and the Freescale logo are trademarks of Freescale Semiconductor,
FlexRay A Communications Network for Automotive Control Systems WFCS 2006 Rainer Makowitz Automotive Systems Engineering, EMEA Freescale and the Freescale logo are trademarks of Freescale Semiconductor,
Virtual KNX/EIB devices in IP networks
 WEINZIERL ENGINEERING GmbH WEINZIERL ENGINEERING GMBH F. Heiny, Dr. Y. Kyselytsya, Dr. Th. Weinzierl Bahnhofstr. 6 D-84558 Tyrlaching Tel. +49 (0) 8623 / 987 98-03 E-Mail: [email protected] Web: www.weinzierl.de
WEINZIERL ENGINEERING GmbH WEINZIERL ENGINEERING GMBH F. Heiny, Dr. Y. Kyselytsya, Dr. Th. Weinzierl Bahnhofstr. 6 D-84558 Tyrlaching Tel. +49 (0) 8623 / 987 98-03 E-Mail: [email protected] Web: www.weinzierl.de
Service and Resource Discovery in Smart Spaces Composed of Low Capacity Devices
 Service and Resource Discovery in Smart Spaces Composed of Low Capacity Devices Önder Uzun, Tanır Özçelebi, Johan Lukkien, Remi Bosman System Architecture and Networking Department of Mathematics and Computer
Service and Resource Discovery in Smart Spaces Composed of Low Capacity Devices Önder Uzun, Tanır Özçelebi, Johan Lukkien, Remi Bosman System Architecture and Networking Department of Mathematics and Computer
CAM-VGA100 User Manual
 CAM-VGA100 User Manual Release Note: 1. Jan 28, 2004 official released v1.0 2. Feb 24, 2004 official released v1.1 Fix the definition of verify code Fix the bug of unable jump to power save mode Fix the
CAM-VGA100 User Manual Release Note: 1. Jan 28, 2004 official released v1.0 2. Feb 24, 2004 official released v1.1 Fix the definition of verify code Fix the bug of unable jump to power save mode Fix the
AN141 SMBUS COMMUNICATION FOR SMALL FORM FACTOR DEVICE FAMILIES. 1. Introduction. 2. Overview of the SMBus Specification. 2.1.
 SMBUS COMMUNICATION FOR SMALL FORM FACTOR DEVICE FAMILIES 1. Introduction C8051F3xx and C8051F41x devices are equipped with an SMBus serial I/O peripheral that is compliant with both the System Management
SMBUS COMMUNICATION FOR SMALL FORM FACTOR DEVICE FAMILIES 1. Introduction C8051F3xx and C8051F41x devices are equipped with an SMBus serial I/O peripheral that is compliant with both the System Management
ECU State Manager Module Development and Design for Automotive Platform Software Based on AUTOSAR 4.0
 ECU State Manager Module Development and Design for Automotive Platform Software Based on AUTOSAR 4.0 Dhanamjayan P.R. 1, Kuruvilla Jose 2, Manjusree S. 3 1 PG Scholar, Embedded Systems, 2 Specialist,
ECU State Manager Module Development and Design for Automotive Platform Software Based on AUTOSAR 4.0 Dhanamjayan P.R. 1, Kuruvilla Jose 2, Manjusree S. 3 1 PG Scholar, Embedded Systems, 2 Specialist,
DS1621 Digital Thermometer and Thermostat
 Digital Thermometer and Thermostat www.dalsemi.com FEATURES Temperature measurements require no external components Measures temperatures from 55 C to +125 C in 0.5 C increments. Fahrenheit equivalent
Digital Thermometer and Thermostat www.dalsemi.com FEATURES Temperature measurements require no external components Measures temperatures from 55 C to +125 C in 0.5 C increments. Fahrenheit equivalent
Communication Networks. MAP-TELE 2011/12 José Ruela
 Communication Networks MAP-TELE 2011/12 José Ruela Network basic mechanisms Introduction to Communications Networks Communications networks Communications networks are used to transport information (data)
Communication Networks MAP-TELE 2011/12 José Ruela Network basic mechanisms Introduction to Communications Networks Communications networks Communications networks are used to transport information (data)
Modbus and ION Technology
 Modbus and ION Technology Modicon Modbus is a communications protocol widely used in process control industries such as manufacturing. ACCESS meters are compatible with Modbus networks as both slaves and
Modbus and ION Technology Modicon Modbus is a communications protocol widely used in process control industries such as manufacturing. ACCESS meters are compatible with Modbus networks as both slaves and
Vehicle data acquisition using CAN By Henning Olsson, OptimumG [email protected]
 Vehicle data acquisition using By Henning Olsson, OptimumG [email protected] Introduction: Data acquisition is one of the best tools to increase the understanding of vehicle behavior. One can
Vehicle data acquisition using By Henning Olsson, OptimumG [email protected] Introduction: Data acquisition is one of the best tools to increase the understanding of vehicle behavior. One can
TSX ETY 110 Module 8
 Module 8 Introduction Subject of this chapter What s in this Chapter? This chapter describes the implementation of a TSX ETY 110 module. This chapter contains the following sections: Section Topic Page
Module 8 Introduction Subject of this chapter What s in this Chapter? This chapter describes the implementation of a TSX ETY 110 module. This chapter contains the following sections: Section Topic Page
Implementing MOD bus and CAN bus Protocol Conversion Interface
 Implementing MOD bus and CAN bus Protocol Conversion Interface Umesh Goyal, Gaurav Khurana M.E., Electronics & Electrical Communications Department, PEC University of Technology, India M.E., Electronics
Implementing MOD bus and CAN bus Protocol Conversion Interface Umesh Goyal, Gaurav Khurana M.E., Electronics & Electrical Communications Department, PEC University of Technology, India M.E., Electronics
Distributed Real-Time Systems (TI-DRTS) Track 2. CAN-BUS Introduction. Version 9.11.2009 Ref. VECTOR application note & Motorola note
 Track 2. CAN-BUS Introduction. Version 9.11.2009 Ref. VECTOR application note & Motorola note") Distributed Real-Time Systems (TI-DRTS) Track 2 CAN-BUS Introduction Version 9.11.2009 Ref. VECTOR application note & Motorola note What is CAN? Controller Area Network (CAN) is a common, small area network
Distributed Real-Time Systems (TI-DRTS) Track 2 CAN-BUS Introduction Version 9.11.2009 Ref. VECTOR application note & Motorola note What is CAN? Controller Area Network (CAN) is a common, small area network
Radio sensor powered by a mini solar cell the EnOcean STM 110 now functions with even less light
 Radio sensor powered by a mini solar cell the EnOcean STM 110 now functions with even less light In this issue, we would like to present the EnOcean radio sensor module STM 110 in more detail. The module
Radio sensor powered by a mini solar cell the EnOcean STM 110 now functions with even less light In this issue, we would like to present the EnOcean radio sensor module STM 110 in more detail. The module
PC-Based Vehicle OBD Tester
 PC-Based Vehicle OBD Tester Presented by: Peter Dzhelekarski, M. Sc. Ph. D. Student at the Technical University of Sofia E-mail: [email protected] Research director: Dimiter Alexiev, Assoc. Prof. Dr. Sofia
PC-Based Vehicle OBD Tester Presented by: Peter Dzhelekarski, M. Sc. Ph. D. Student at the Technical University of Sofia E-mail: [email protected] Research director: Dimiter Alexiev, Assoc. Prof. Dr. Sofia
RPDO 1 TPDO 1 TPDO 5 TPDO 6 TPDO 7 TPDO 8
 EN ZC - 6DI8DO CANopen I/O Module 6 Digital Input 8 Digital Output Or 8 Counters (3 bit) 8 Digital input 8 Digital output User Manual Contents: Features PDOs PDO Type Emergency Message Functional Diagrams
EN ZC - 6DI8DO CANopen I/O Module 6 Digital Input 8 Digital Output Or 8 Counters (3 bit) 8 Digital input 8 Digital output User Manual Contents: Features PDOs PDO Type Emergency Message Functional Diagrams
Real-Time Systems Hermann Härtig Real-Time Communication (following Kopetz, Liu, Schönberg, Löser)
") Real-Time Systems Hermann Härtig Real-Time Communication (following Kopetz, Liu, Schönberg, Löser) 05/02/15 Contents Overview IO Busses: PCI Networks as schedulable resources: Priority / Time-Driven /
Real-Time Systems Hermann Härtig Real-Time Communication (following Kopetz, Liu, Schönberg, Löser) 05/02/15 Contents Overview IO Busses: PCI Networks as schedulable resources: Priority / Time-Driven /
The Programming Interface
 : In-System Programming Features Program any AVR MCU In-System Reprogram both data Flash and parameter EEPROM memories Eliminate sockets Simple -wire SPI programming interface Introduction In-System programming
: In-System Programming Features Program any AVR MCU In-System Reprogram both data Flash and parameter EEPROM memories Eliminate sockets Simple -wire SPI programming interface Introduction In-System programming
Simple and error-free startup of the communication cluster. as well as high system stability over long service life are
 Network Management for FlexRay New network topologies tested in practice Simple and error-free startup of the communication cluster as well as high system stability over long service life are required
Network Management for FlexRay New network topologies tested in practice Simple and error-free startup of the communication cluster as well as high system stability over long service life are required
Local Interconnect Network (LIN) Physical Interface
 Physical Interface") Freescale Semiconductor Engineering Bulletin EB215 Rev. 1.0, 03/2005 Local Interconnect Network (LIN) Physical Interface Difference Between MC33399 and MC33661 Introduction This engineering bulletin highlights
Freescale Semiconductor Engineering Bulletin EB215 Rev. 1.0, 03/2005 Local Interconnect Network (LIN) Physical Interface Difference Between MC33399 and MC33661 Introduction This engineering bulletin highlights
The I2C Bus. NXP Semiconductors: UM10204 I2C-bus specification and user manual. 14.10.2010 HAW - Arduino 1
 The I2C Bus Introduction The I2C-bus is a de facto world standard that is now implemented in over 1000 different ICs manufactured by more than 50 companies. Additionally, the versatile I2C-bus is used
The I2C Bus Introduction The I2C-bus is a de facto world standard that is now implemented in over 1000 different ICs manufactured by more than 50 companies. Additionally, the versatile I2C-bus is used
Microcontroller Based Low Cost Portable PC Mouse and Keyboard Tester
 Leonardo Journal of Sciences ISSN 1583-0233 Issue 20, January-June 2012 p. 31-36 Microcontroller Based Low Cost Portable PC Mouse and Keyboard Tester Ganesh Sunil NHIVEKAR *, and Ravidra Ramchandra MUDHOLKAR
Leonardo Journal of Sciences ISSN 1583-0233 Issue 20, January-June 2012 p. 31-36 Microcontroller Based Low Cost Portable PC Mouse and Keyboard Tester Ganesh Sunil NHIVEKAR *, and Ravidra Ramchandra MUDHOLKAR
Understanding SAE J1939. by Simma Software, Inc.
 Understanding SAE J1939 by Simma Software, Inc. Contact E-mail: jrsimma at simmasoftware dot com Phone: 888-256-3828 For J1939 source code, see J1939 Software Starting Notes Ask questions anytime. This
Understanding SAE J1939 by Simma Software, Inc. Contact E-mail: jrsimma at simmasoftware dot com Phone: 888-256-3828 For J1939 source code, see J1939 Software Starting Notes Ask questions anytime. This
Getting Started with CANopen Version 1.1 2008-05-29 Application Note AN-AON-1-1102
 Version 1.1 2008-05-29 Restrictions Abstract Public Document This application note explains items which need to be considered when creating a CANopen device or system. The Manager, Systems Engineer, and
Version 1.1 2008-05-29 Restrictions Abstract Public Document This application note explains items which need to be considered when creating a CANopen device or system. The Manager, Systems Engineer, and