Real Time Scheduling Basic Concepts. Radek Pelánek
|
|
|
- Blanche Hawkins
- 9 years ago
- Views:
Transcription
1 Real Time Scheduling Basic Concepts Radek Pelánek

2 Basic Elements Model of RT System abstraction focus only on timing constraints idealization (e.g., zero switching time)

3 Basic Elements Basic Notions task process, something that needs to be done (sequentially) job a) same as task, b) task is a series of jobs (i.e., periodic task) resource active (processor), passive (e.g., mutex, file, database lock) schedule assignments of resources to tasks scheduling algorithm creates schedule

4 Basic Elements Basic Notions II feasible schedule all tasks can be completed according to a set of specified constraints schedulable set of tasks there exists at least one algorithm that can produce feasible schedule

5 Basic Elements Model of Execution

6 Basic Elements Preemption Preemption temporarily interrupting a task (without requiring its cooperation), with the intention of resuming the task at a later time Why preemption?

7 Basic Elements Preemption Reasons for preemption (examples): different levels of criticality (e.g., brakes control vs. radio tuning) more efficient schedules
 more efficient schedules")
8 Example A Simple Case set of tasks J = {J 1,..., J n } 1 processor no other resources schedule: function σ : R + N σ(t) = k, k > 0 means that the task J k is active at time t σ(t) = 0 means that the processor is idle
 = 0 means that the")
9 Example Example of a Schedule

10 Example Example of a Preemptive Schedule

11 Timing Parameters Basic Parameters arrival time a i time when a task becomes ready for execution also denoted release time, request time: r i computation time C i time necessary for completion of a task absolute deadline d i time before which a task should be completed start time s i time at which a task starts its execution finishing time f i time at which a task finishes its execution criticality typically hard/soft

12 Timing Parameters Illustration of Timing Parameters

13 Timing Parameters Derived Parameters relative deadline D i = d i a i response time R i = f i a i lateness L i = f i d i delay of a task (can be negative) tardiness (exceeding time) E i = max(0, L i ) slack time (laxity) X i = d i a i C maximum time a task can be delayed on its activation to complete within deadline

14 Timing Parameters Example J 1 J 2 J 3 a i C i d i determine slack time of each job find a feasible schedule (with, without preemption) determine response time, lateness of each job (in your schedule)
")
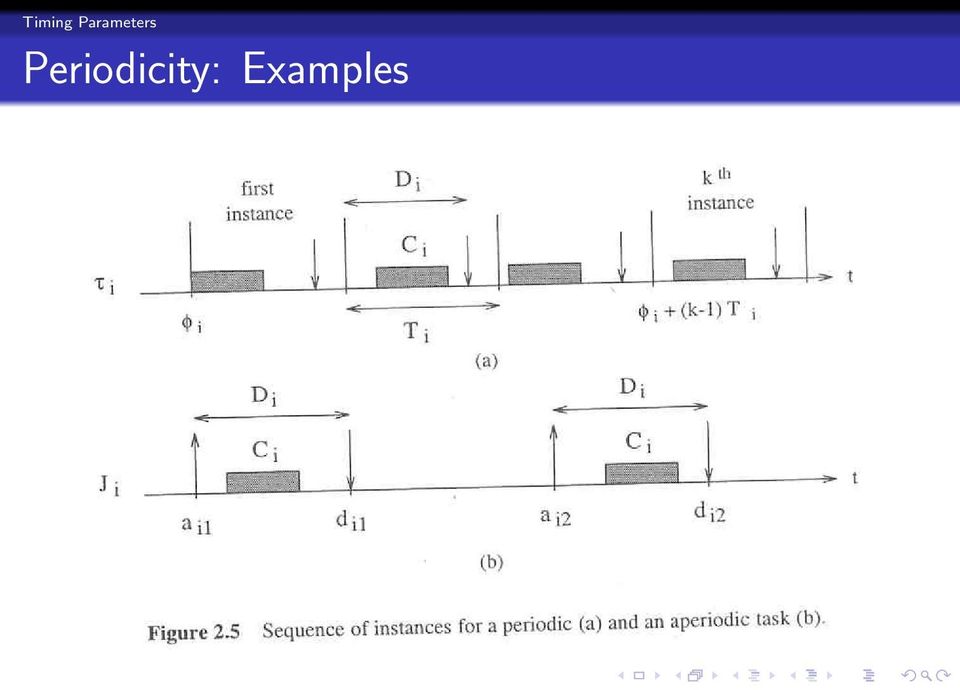
15 Timing Parameters Periodicity periodic infinite sequence of identical jobs, activated at a constant rate; denoted τ i phase φ i activation time of the first job period T, activation time of the k-th job is φ i + (k 1) T i aperiodic a single job, or a sequence without regular activation, denoted J i sporadic: consecutive jobs separated by minimum inter-arrival time

16 Timing Parameters Periodicity: Examples
17 Precedence Constraints Precedence Relations used to capture dependencies among tasks described by precedence graph J a < J b means J a is a predecessor of J b J a J b means J a is an immediate predecessor of J b

18 Resource Constraints Resources resource something needed to advance execution of a task shared resource resource used by several tasks mutually exclusive resource shared resource that can be used by only one task at a time critical section piece of code executed under mutual exclusion constraint

19 Resource Constraints Blocking on Shared Resources

20 Resource Constraints Task Status

21 Definition General Problem Input set of tasks J = {J 1,..., J n } set of processors P = {P 1,..., P m } set of resources R = {R 1,..., R r } constraints: timing, precedence,... Output Assignment of processor P and resources R to tasks from J such that the given constraints are satisfied. In general NP-complete.
22 Examples Example 1 5 periodic tasks, relative deadline D i = period T i, phase of all tasks is 0 A B C D E T i C i Is there a feasible schedule on three processors (with preemption, without preemption).
23 Examples Example 2 9 tasks, arrival time 0, deadline 12, computation time: A B C D E F G H J C i precedence constraints: A J; D E, F, G, H Is there a feasible schedule on three processors (without preemption)?
24 Examples Example 2 9 tasks, arrival time 0, deadline 12, computation time: A B C D E F G H J C i precedence constraints: A J; D E, F, G, H Is there a feasible schedule on three processors (without preemption)? Assume that jobs have priorities p A > p B >... > p J. What is the schedule based on priorities? Are all deadlines met?
25 Classification Preemption preemptive running task can be interrupted non-preemptive task, once started, is executed by processor until completion
26 Classification Static vs Dynamic static scheduling decision based on fixed parameters, assigned before their activation typical example: highest priority scheduling dynamic scheduling decisions based on dynamic parameters that may change during system evolution typical example: earliest deadline scheduling
27 Classification Off line vs On line off line the schedule is generated for the entire task set before the task activations (must be static) on line scheduling decisions are taken at runtime every time a new task enters the system (may be static or dynamic)
28 Classification Optimal vs Heuristic optimal algorithm minimizes a given cost function; if no cost function is given then it always finds a feasible schedule if there exists one heuristic algorithm tries to find feasible schedule; no guarantees of optimality
29 Performance Evaluation Cost Functions for Tasks
30 Performance Evaluation Cost Functions for Schedule average response time total completion time maximum lateness number of late tasks 1 n Σn i=1(f i a i ) max i (f i ) min i (a i ) max i (f i d i )
31 Performance Evaluation Example: Different Cost Functions All jobs have arrival time 0. J 1 J 2 J 3 J 4 J 5 C i d i Find a schedule which: 1 minimizes the number of late tasks 2 minimizes the maximum lateness
32 Performance Evaluation Example: Different Cost Functions
33 Performance Evaluation Outlook we will study algorithms for specific scheduling problems given: type of tasks, type of schedule, cost function find: scheduling algorithm
Aperiodic Task Scheduling
 Aperiodic Task Scheduling Jian-Jia Chen (slides are based on Peter Marwedel) TU Dortmund, Informatik 12 Germany Springer, 2010 2014 年 11 月 19 日 These slides use Microsoft clip arts. Microsoft copyright
Aperiodic Task Scheduling Jian-Jia Chen (slides are based on Peter Marwedel) TU Dortmund, Informatik 12 Germany Springer, 2010 2014 年 11 月 19 日 These slides use Microsoft clip arts. Microsoft copyright
Periodic Task Scheduling
 Periodic Task Scheduling Radek Pelánek Motivation and Assumptions Examples of Periodic Tasks sensory data acquisition control loops action planning system monitoring Motivation and Assumptions Simplifying
Periodic Task Scheduling Radek Pelánek Motivation and Assumptions Examples of Periodic Tasks sensory data acquisition control loops action planning system monitoring Motivation and Assumptions Simplifying
Lecture Outline Overview of real-time scheduling algorithms Outline relative strengths, weaknesses
 Overview of Real-Time Scheduling Embedded Real-Time Software Lecture 3 Lecture Outline Overview of real-time scheduling algorithms Clock-driven Weighted round-robin Priority-driven Dynamic vs. static Deadline
Overview of Real-Time Scheduling Embedded Real-Time Software Lecture 3 Lecture Outline Overview of real-time scheduling algorithms Clock-driven Weighted round-robin Priority-driven Dynamic vs. static Deadline
Common Approaches to Real-Time Scheduling
 Common Approaches to Real-Time Scheduling Clock-driven time-driven schedulers Priority-driven schedulers Examples of priority driven schedulers Effective timing constraints The Earliest-Deadline-First
Common Approaches to Real-Time Scheduling Clock-driven time-driven schedulers Priority-driven schedulers Examples of priority driven schedulers Effective timing constraints The Earliest-Deadline-First
Classification - Examples
 Lecture 2 Scheduling 1 Classification - Examples 1 r j C max given: n jobs with processing times p 1,...,p n and release dates r 1,...,r n jobs have to be scheduled without preemption on one machine taking
Lecture 2 Scheduling 1 Classification - Examples 1 r j C max given: n jobs with processing times p 1,...,p n and release dates r 1,...,r n jobs have to be scheduled without preemption on one machine taking
Real-Time Scheduling (Part 1) (Working Draft) Real-Time System Example
 (Working Draft) Real-Time System Example") Real-Time Scheduling (Part 1) (Working Draft) Insup Lee Department of Computer and Information Science School of Engineering and Applied Science University of Pennsylvania www.cis.upenn.edu/~lee/ CIS 41,
Real-Time Scheduling (Part 1) (Working Draft) Insup Lee Department of Computer and Information Science School of Engineering and Applied Science University of Pennsylvania www.cis.upenn.edu/~lee/ CIS 41,
Introduction to Scheduling Theory
 Introduction to Scheduling Theory Arnaud Legrand Laboratoire Informatique et Distribution IMAG CNRS, France [email protected] November 8, 2004 1/ 26 Outline 1 Task graphs from outer space 2 Scheduling
Introduction to Scheduling Theory Arnaud Legrand Laboratoire Informatique et Distribution IMAG CNRS, France [email protected] November 8, 2004 1/ 26 Outline 1 Task graphs from outer space 2 Scheduling
Scheduling Real-time Tasks: Algorithms and Complexity
 Scheduling Real-time Tasks: Algorithms and Complexity Sanjoy Baruah The University of North Carolina at Chapel Hill Email: [email protected] Joël Goossens Université Libre de Bruxelles Email: [email protected]
Scheduling Real-time Tasks: Algorithms and Complexity Sanjoy Baruah The University of North Carolina at Chapel Hill Email: [email protected] Joël Goossens Université Libre de Bruxelles Email: [email protected]
Operating System Aspects. Real-Time Systems. Resource Management Tasks
 Operating System Aspects Chapter 2: Basics Chapter 3: Multimedia Systems Communication Aspects and Services Multimedia Applications and Communication Multimedia Transfer and Control Protocols Quality of
Operating System Aspects Chapter 2: Basics Chapter 3: Multimedia Systems Communication Aspects and Services Multimedia Applications and Communication Multimedia Transfer and Control Protocols Quality of
Lecture 3 Theoretical Foundations of RTOS
 CENG 383 Real-Time Systems Lecture 3 Theoretical Foundations of RTOS Asst. Prof. Tolga Ayav, Ph.D. Department of Computer Engineering Task States Executing Ready Suspended (or blocked) Dormant (or sleeping)
CENG 383 Real-Time Systems Lecture 3 Theoretical Foundations of RTOS Asst. Prof. Tolga Ayav, Ph.D. Department of Computer Engineering Task States Executing Ready Suspended (or blocked) Dormant (or sleeping)
Scheduling Single Machine Scheduling. Tim Nieberg
 Scheduling Single Machine Scheduling Tim Nieberg Single machine models Observation: for non-preemptive problems and regular objectives, a sequence in which the jobs are processed is sufficient to describe
Scheduling Single Machine Scheduling Tim Nieberg Single machine models Observation: for non-preemptive problems and regular objectives, a sequence in which the jobs are processed is sufficient to describe
3. Scheduling issues. Common approaches /1. Common approaches /2. Common approaches /3. 2012/13 UniPD / T. Vardanega 23/01/2013. Real-Time Systems 1
 Common approaches /1 3. Scheduling issues Clock-driven (time-driven) scheduling Scheduling decisions are made beforehand (off line) and carried out at predefined time instants The time instants normally
Common approaches /1 3. Scheduling issues Clock-driven (time-driven) scheduling Scheduling decisions are made beforehand (off line) and carried out at predefined time instants The time instants normally
The simple case: Cyclic execution
 The simple case: Cyclic execution SCHEDULING PERIODIC TASKS Repeat a set of aperiodic tasks at a specific rate (cycle) 1 2 Periodic tasks Periodic tasks (the simplified case) Scheduled to run Arrival time
The simple case: Cyclic execution SCHEDULING PERIODIC TASKS Repeat a set of aperiodic tasks at a specific rate (cycle) 1 2 Periodic tasks Periodic tasks (the simplified case) Scheduled to run Arrival time
Aperiodic Task Scheduling
 Aperiodic Task Scheduling Gerhard Fohler Mälardalen University, Sweden [email protected] Real-Time Systems Gerhard Fohler 2005 Non Periodic Tasks So far periodic events and tasks what about others?
Aperiodic Task Scheduling Gerhard Fohler Mälardalen University, Sweden [email protected] Real-Time Systems Gerhard Fohler 2005 Non Periodic Tasks So far periodic events and tasks what about others?
Predictable response times in event-driven real-time systems
 Predictable response times in event-driven real-time systems Automotive 2006 - Security and Reliability in Automotive Systems Stuttgart, October 2006. Presented by: Michael González Harbour [email protected]
Predictable response times in event-driven real-time systems Automotive 2006 - Security and Reliability in Automotive Systems Stuttgart, October 2006. Presented by: Michael González Harbour [email protected]
Today. Intro to real-time scheduling Cyclic executives. Scheduling tables Frames Frame size constraints. Non-independent tasks Pros and cons
 Today Intro to real-time scheduling Cyclic executives Scheduling tables Frames Frame size constraints Generating schedules Non-independent tasks Pros and cons Real-Time Systems The correctness of a real-time
Today Intro to real-time scheduling Cyclic executives Scheduling tables Frames Frame size constraints Generating schedules Non-independent tasks Pros and cons Real-Time Systems The correctness of a real-time
Real-time Scheduling of Periodic Tasks (1) Advanced Operating Systems Lecture 2
 Advanced Operating Systems Lecture 2") Real-time Scheduling of Periodic Tasks (1) Advanced Operating Systems Lecture 2 Lecture Outline Scheduling periodic tasks The rate monotonic algorithm Definition Non-optimality Time-demand analysis...
Real-time Scheduling of Periodic Tasks (1) Advanced Operating Systems Lecture 2 Lecture Outline Scheduling periodic tasks The rate monotonic algorithm Definition Non-optimality Time-demand analysis...
4. Fixed-Priority Scheduling
 Simple workload model 4. Fixed-Priority Scheduling Credits to A. Burns and A. Wellings The application is assumed to consist of a fixed set of tasks All tasks are periodic with known periods This defines
Simple workload model 4. Fixed-Priority Scheduling Credits to A. Burns and A. Wellings The application is assumed to consist of a fixed set of tasks All tasks are periodic with known periods This defines
Process Scheduling. Process Scheduler. Chapter 7. Context Switch. Scheduler. Selection Strategies
 Chapter 7 Process Scheduling Process Scheduler Why do we even need to a process scheduler? In simplest form, CPU must be shared by > OS > Application In reality, [multiprogramming] > OS : many separate
Chapter 7 Process Scheduling Process Scheduler Why do we even need to a process scheduler? In simplest form, CPU must be shared by > OS > Application In reality, [multiprogramming] > OS : many separate
REAL TIME OPERATING SYSTEMS. Lesson-18:
 REAL TIME OPERATING SYSTEMS Lesson-18: Round Robin Time Slicing of tasks of equal priorities 1 1. Common scheduling models 2 Common scheduling models Cooperative Scheduling of ready tasks in a circular
REAL TIME OPERATING SYSTEMS Lesson-18: Round Robin Time Slicing of tasks of equal priorities 1 1. Common scheduling models 2 Common scheduling models Cooperative Scheduling of ready tasks in a circular
Real- Time Scheduling
 Real- Time Scheduling Chenyang Lu CSE 467S Embedded Compu5ng Systems Readings Ø Single-Processor Scheduling: Hard Real-Time Computing Systems, by G. Buttazzo. q Chapter 4 Periodic Task Scheduling q Chapter
Real- Time Scheduling Chenyang Lu CSE 467S Embedded Compu5ng Systems Readings Ø Single-Processor Scheduling: Hard Real-Time Computing Systems, by G. Buttazzo. q Chapter 4 Periodic Task Scheduling q Chapter
Multi-core real-time scheduling
 Multi-core real-time scheduling Credits: Anne-Marie Déplanche, Irccyn, Nantes (many slides come from her presentation at ETR, Brest, September 2011) 1 Multi-core real-time scheduling! Introduction: problem
Multi-core real-time scheduling Credits: Anne-Marie Déplanche, Irccyn, Nantes (many slides come from her presentation at ETR, Brest, September 2011) 1 Multi-core real-time scheduling! Introduction: problem
Exercises : Real-time Scheduling analysis
 Exercises : Real-time Scheduling analysis Frank Singhoff University of Brest June 2013 Exercise 1 : Fixed priority scheduling and Rate Monotonic priority assignment Given a set of tasks defined by the
Exercises : Real-time Scheduling analysis Frank Singhoff University of Brest June 2013 Exercise 1 : Fixed priority scheduling and Rate Monotonic priority assignment Given a set of tasks defined by the
Priority-Driven Scheduling
 Priority-Driven Scheduling Advantages of Priority-Driven Scheduling Priority-driven scheduling is easy to implement. It does not require the information on the release times and execution times of the
Priority-Driven Scheduling Advantages of Priority-Driven Scheduling Priority-driven scheduling is easy to implement. It does not require the information on the release times and execution times of the
Scheduling Aperiodic and Sporadic Jobs in Priority- Driven Systems
 Scheduling Aperiodic and Sporadic Jobs in Priority- Driven Systems Ingo Sander [email protected] Liu: Chapter 7 IL2212 Embedded Software 1 Outline l System Model and Assumptions l Scheduling Aperiodic Jobs l
Scheduling Aperiodic and Sporadic Jobs in Priority- Driven Systems Ingo Sander [email protected] Liu: Chapter 7 IL2212 Embedded Software 1 Outline l System Model and Assumptions l Scheduling Aperiodic Jobs l
Real-Time Component Software. slide credits: H. Kopetz, P. Puschner
 Real-Time Component Software slide credits: H. Kopetz, P. Puschner Overview OS services Task Structure Task Interaction Input/Output Error Detection 2 Operating System and Middleware Applica3on So5ware
Real-Time Component Software slide credits: H. Kopetz, P. Puschner Overview OS services Task Structure Task Interaction Input/Output Error Detection 2 Operating System and Middleware Applica3on So5ware
Improved Handling of Soft Aperiodic Tasks in Offline Scheduled Real-Time Systems using Total Bandwidth Server
 Improved Handling of Soft Aperiodic Tasks in Offline Scheduled Real-Time Systems using Total Bandwidth Server Gerhard Fohler, Tomas Lennvall Mälardalen University Västeras, Sweden gfr, tlv @mdh.se Giorgio
Improved Handling of Soft Aperiodic Tasks in Offline Scheduled Real-Time Systems using Total Bandwidth Server Gerhard Fohler, Tomas Lennvall Mälardalen University Västeras, Sweden gfr, tlv @mdh.se Giorgio
Real-Time Software. Basic Scheduling and Response-Time Analysis. René Rydhof Hansen. 21. september 2010
 Real-Time Software Basic Scheduling and Response-Time Analysis René Rydhof Hansen 21. september 2010 TSW (2010e) (Lecture 05) Real-Time Software 21. september 2010 1 / 28 Last Time Time in a real-time
Real-Time Software Basic Scheduling and Response-Time Analysis René Rydhof Hansen 21. september 2010 TSW (2010e) (Lecture 05) Real-Time Software 21. september 2010 1 / 28 Last Time Time in a real-time
Module 6. Embedded System Software. Version 2 EE IIT, Kharagpur 1
 Module 6 Embedded System Software Version 2 EE IIT, Kharagpur 1 Lesson 30 Real-Time Task Scheduling Part 2 Version 2 EE IIT, Kharagpur 2 Specific Instructional Objectives At the end of this lesson, the
Module 6 Embedded System Software Version 2 EE IIT, Kharagpur 1 Lesson 30 Real-Time Task Scheduling Part 2 Version 2 EE IIT, Kharagpur 2 Specific Instructional Objectives At the end of this lesson, the
A Survey of Fitting Device-Driver Implementations into Real-Time Theoretical Schedulability Analysis
 A Survey of Fitting Device-Driver Implementations into Real-Time Theoretical Schedulability Analysis Mark Stanovich Florida State University, USA Contents 1 Introduction 2 2 Scheduling Theory 3 2.1 Workload
A Survey of Fitting Device-Driver Implementations into Real-Time Theoretical Schedulability Analysis Mark Stanovich Florida State University, USA Contents 1 Introduction 2 2 Scheduling Theory 3 2.1 Workload
W4118 Operating Systems. Instructor: Junfeng Yang
 W4118 Operating Systems Instructor: Junfeng Yang Outline Introduction to scheduling Scheduling algorithms 1 Direction within course Until now: interrupts, processes, threads, synchronization Mostly mechanisms
W4118 Operating Systems Instructor: Junfeng Yang Outline Introduction to scheduling Scheduling algorithms 1 Direction within course Until now: interrupts, processes, threads, synchronization Mostly mechanisms
Commonly Used Approaches to Real-Time Scheduling
 Integre Technical Publishing Co., Inc. Liu January 13, 2000 8:46 a.m. chap4 page 60 C H A P T E R 4 Commonly Used Approaches to Real-Time Scheduling This chapter provides a brief overview of three commonly
Integre Technical Publishing Co., Inc. Liu January 13, 2000 8:46 a.m. chap4 page 60 C H A P T E R 4 Commonly Used Approaches to Real-Time Scheduling This chapter provides a brief overview of three commonly
ICS 143 - Principles of Operating Systems
 ICS 143 - Principles of Operating Systems Lecture 5 - CPU Scheduling Prof. Nalini Venkatasubramanian [email protected] Note that some slides are adapted from course text slides 2008 Silberschatz. Some
ICS 143 - Principles of Operating Systems Lecture 5 - CPU Scheduling Prof. Nalini Venkatasubramanian [email protected] Note that some slides are adapted from course text slides 2008 Silberschatz. Some
Announcements. Basic Concepts. Histogram of Typical CPU- Burst Times. Dispatcher. CPU Scheduler. Burst Cycle. Reading
 Announcements Reading Chapter 5 Chapter 7 (Monday or Wednesday) Basic Concepts CPU I/O burst cycle Process execution consists of a cycle of CPU execution and I/O wait. CPU burst distribution What are the
Announcements Reading Chapter 5 Chapter 7 (Monday or Wednesday) Basic Concepts CPU I/O burst cycle Process execution consists of a cycle of CPU execution and I/O wait. CPU burst distribution What are the
Operating Systems. III. Scheduling. http://soc.eurecom.fr/os/
 Operating Systems Institut Mines-Telecom III. Scheduling Ludovic Apvrille [email protected] Eurecom, office 470 http://soc.eurecom.fr/os/ Outline Basics of Scheduling Definitions Switching
Operating Systems Institut Mines-Telecom III. Scheduling Ludovic Apvrille [email protected] Eurecom, office 470 http://soc.eurecom.fr/os/ Outline Basics of Scheduling Definitions Switching
SOFTWARE VERIFICATION RESEARCH CENTRE THE UNIVERSITY OF QUEENSLAND. Queensland 4072 Australia TECHNICAL REPORT. No. 02-19. Real-Time Scheduling Theory
 SOFTWARE VERIFICATION RESEARCH CENTRE THE UNIVERSITY OF QUEENSLAND Queensland 4072 Australia TECHNICAL REPORT No. 02-19 Real-Time Scheduling Theory C. J. Fidge April 2002 Phone: +61 7 3365 1003 Fax: +61
SOFTWARE VERIFICATION RESEARCH CENTRE THE UNIVERSITY OF QUEENSLAND Queensland 4072 Australia TECHNICAL REPORT No. 02-19 Real-Time Scheduling Theory C. J. Fidge April 2002 Phone: +61 7 3365 1003 Fax: +61
Objectives. Chapter 5: CPU Scheduling. CPU Scheduler. Non-preemptive and preemptive. Dispatcher. Alternating Sequence of CPU And I/O Bursts
 Objectives Chapter 5: CPU Scheduling Introduce CPU scheduling, which is the basis for multiprogrammed operating systems Describe various CPU-scheduling algorithms Discuss evaluation criteria for selecting
Objectives Chapter 5: CPU Scheduling Introduce CPU scheduling, which is the basis for multiprogrammed operating systems Describe various CPU-scheduling algorithms Discuss evaluation criteria for selecting
CPU Scheduling. CPU Scheduling
 CPU Scheduling Electrical and Computer Engineering Stephen Kim ([email protected]) ECE/IUPUI RTOS & APPS 1 CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling
CPU Scheduling Electrical and Computer Engineering Stephen Kim ([email protected]) ECE/IUPUI RTOS & APPS 1 CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling
Scheduling Shop Scheduling. Tim Nieberg
 Scheduling Shop Scheduling Tim Nieberg Shop models: General Introduction Remark: Consider non preemptive problems with regular objectives Notation Shop Problems: m machines, n jobs 1,..., n operations
Scheduling Shop Scheduling Tim Nieberg Shop models: General Introduction Remark: Consider non preemptive problems with regular objectives Notation Shop Problems: m machines, n jobs 1,..., n operations
Operating Systems Concepts: Chapter 7: Scheduling Strategies
 Operating Systems Concepts: Chapter 7: Scheduling Strategies Olav Beckmann Huxley 449 http://www.doc.ic.ac.uk/~ob3 Acknowledgements: There are lots. See end of Chapter 1. Home Page for the course: http://www.doc.ic.ac.uk/~ob3/teaching/operatingsystemsconcepts/
Operating Systems Concepts: Chapter 7: Scheduling Strategies Olav Beckmann Huxley 449 http://www.doc.ic.ac.uk/~ob3 Acknowledgements: There are lots. See end of Chapter 1. Home Page for the course: http://www.doc.ic.ac.uk/~ob3/teaching/operatingsystemsconcepts/
174: Scheduling Systems. Emil Michta University of Zielona Gora, Zielona Gora, Poland 1 TIMING ANALYSIS IN NETWORKED MEASUREMENT CONTROL SYSTEMS
 174: Scheduling Systems Emil Michta University of Zielona Gora, Zielona Gora, Poland 1 Timing Analysis in Networked Measurement Control Systems 1 2 Introduction to Scheduling Systems 2 3 Scheduling Theory
174: Scheduling Systems Emil Michta University of Zielona Gora, Zielona Gora, Poland 1 Timing Analysis in Networked Measurement Control Systems 1 2 Introduction to Scheduling Systems 2 3 Scheduling Theory
Abstract Title: Planned Preemption for Flexible Resource Constrained Project Scheduling
 Abstract number: 015-0551 Abstract Title: Planned Preemption for Flexible Resource Constrained Project Scheduling Karuna Jain and Kanchan Joshi Shailesh J. Mehta School of Management, Indian Institute
Abstract number: 015-0551 Abstract Title: Planned Preemption for Flexible Resource Constrained Project Scheduling Karuna Jain and Kanchan Joshi Shailesh J. Mehta School of Management, Indian Institute
Efficient Scheduling of Sporadic, Aperiodic, and Periodic Tasks with Complex Constraints
 Efficient Scheduling of Sporadic, Aperiodic, and Periodic Tasks with Complex Constraints Damir Isović and Gerhard Fohler Department of Computer Engineering Mälardalen University, Sweden dic,[email protected]
Efficient Scheduling of Sporadic, Aperiodic, and Periodic Tasks with Complex Constraints Damir Isović and Gerhard Fohler Department of Computer Engineering Mälardalen University, Sweden dic,[email protected]
Job Scheduling Model
 Scheduling 1 Job Scheduling Model problem scenario: a set of jobs needs to be executed using a single server, on which only one job at a time may run for theith job, we have an arrival timea i and a run
Scheduling 1 Job Scheduling Model problem scenario: a set of jobs needs to be executed using a single server, on which only one job at a time may run for theith job, we have an arrival timea i and a run
Scheduling. Yücel Saygın. These slides are based on your text book and on the slides prepared by Andrew S. Tanenbaum
 Scheduling Yücel Saygın These slides are based on your text book and on the slides prepared by Andrew S. Tanenbaum 1 Scheduling Introduction to Scheduling (1) Bursts of CPU usage alternate with periods
Scheduling Yücel Saygın These slides are based on your text book and on the slides prepared by Andrew S. Tanenbaum 1 Scheduling Introduction to Scheduling (1) Bursts of CPU usage alternate with periods
Real-time scheduling algorithms, task visualization
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 2006 Real-time scheduling algorithms, task visualization Kevin Churnetski Follow this and additional works at:
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 2006 Real-time scheduling algorithms, task visualization Kevin Churnetski Follow this and additional works at:
Real-Time Scheduling 1 / 39
 Real-Time Scheduling 1 / 39 Multiple Real-Time Processes A runs every 30 msec; each time it needs 10 msec of CPU time B runs 25 times/sec for 15 msec C runs 20 times/sec for 5 msec For our equation, A
Real-Time Scheduling 1 / 39 Multiple Real-Time Processes A runs every 30 msec; each time it needs 10 msec of CPU time B runs 25 times/sec for 15 msec C runs 20 times/sec for 5 msec For our equation, A
Real Time Database Systems
 Real Time Database Systems Jan Lindström Solid, an IBM Company Itälahdenkatu 22 B 00210 Helsinki, Finland [email protected] March 25, 2008 1 Introduction A real-time database system (RTDBS) is a
Real Time Database Systems Jan Lindström Solid, an IBM Company Itälahdenkatu 22 B 00210 Helsinki, Finland [email protected] March 25, 2008 1 Introduction A real-time database system (RTDBS) is a
AN APPROPRIATE ENGINEERING APPROACH
 PREEMPTIVE PRIORITY BASED SCHEDULING: AN APPROPRIATE ENGINEERING APPROACH Alan Burns Real-Time Systems Research Group Department of Computer Science University of York, UK ABSTRACT Scheduling theories
PREEMPTIVE PRIORITY BASED SCHEDULING: AN APPROPRIATE ENGINEERING APPROACH Alan Burns Real-Time Systems Research Group Department of Computer Science University of York, UK ABSTRACT Scheduling theories
Using EDF in Linux: SCHED DEADLINE. Luca Abeni [email protected]
 Using EDF in Linux: Luca Abeni [email protected] Using Fixed Priorities in Linux SCHED FIFO and SCHED RR use fixed priorities They can be used for real-time tasks, to implement RM and DM Real-time tasks
Using EDF in Linux: Luca Abeni [email protected] Using Fixed Priorities in Linux SCHED FIFO and SCHED RR use fixed priorities They can be used for real-time tasks, to implement RM and DM Real-time tasks
A STUDY OF TASK SCHEDULING IN MULTIPROCESSOR ENVIROMENT Ranjit Rajak 1, C.P.Katti 2, Nidhi Rajak 3
 A STUDY OF TASK SCHEDULING IN MULTIPROCESSOR ENVIROMENT Ranjit Rajak 1, C.P.Katti, Nidhi Rajak 1 Department of Computer Science & Applications, Dr.H.S.Gour Central University, Sagar, India, [email protected]
A STUDY OF TASK SCHEDULING IN MULTIPROCESSOR ENVIROMENT Ranjit Rajak 1, C.P.Katti, Nidhi Rajak 1 Department of Computer Science & Applications, Dr.H.S.Gour Central University, Sagar, India, [email protected]
CPU SCHEDULING (CONT D) NESTED SCHEDULING FUNCTIONS
 NESTED SCHEDULING FUNCTIONS") CPU SCHEDULING CPU SCHEDULING (CONT D) Aims to assign processes to be executed by the CPU in a way that meets system objectives such as response time, throughput, and processor efficiency Broken down into
CPU SCHEDULING CPU SCHEDULING (CONT D) Aims to assign processes to be executed by the CPU in a way that meets system objectives such as response time, throughput, and processor efficiency Broken down into
Hard Real-Time Reconfiguration Port Scheduling
 Hard Real-Time Reconfiguration Port Scheduling Florian Dittmann and Stefan Frank Heinz Nixdorf Institute, University of Paderborn Fuerstenallee, 330 Paderborn, Germany {roichen, sfrank}@upb.de Abstract
Hard Real-Time Reconfiguration Port Scheduling Florian Dittmann and Stefan Frank Heinz Nixdorf Institute, University of Paderborn Fuerstenallee, 330 Paderborn, Germany {roichen, sfrank}@upb.de Abstract
Quality of Service su Linux: Passato Presente e Futuro
 Quality of Service su Linux: Passato Presente e Futuro Luca Abeni [email protected] Università di Trento Quality of Service su Linux:Passato Presente e Futuro p. 1 Quality of Service Time Sensitive applications
Quality of Service su Linux: Passato Presente e Futuro Luca Abeni [email protected] Università di Trento Quality of Service su Linux:Passato Presente e Futuro p. 1 Quality of Service Time Sensitive applications
CPU Scheduling. Multitasking operating systems come in two flavours: cooperative multitasking and preemptive multitasking.
 CPU Scheduling The scheduler is the component of the kernel that selects which process to run next. The scheduler (or process scheduler, as it is sometimes called) can be viewed as the code that divides
CPU Scheduling The scheduler is the component of the kernel that selects which process to run next. The scheduler (or process scheduler, as it is sometimes called) can be viewed as the code that divides
Effective Scheduling Algorithm and Scheduler Implementation for use with Time-Triggered Co-operative Architecture
 http://dx.doi.org/10.5755/j01.eee.20.6.7282 ELEKTRONIKA IR ELEKTROTECHNIKA, ISSN 1392 1215, VOL. 20, NO. 6, 2014 Effective Scheduling Algorithm and Scheduler Implementation for use with Time-Triggered
http://dx.doi.org/10.5755/j01.eee.20.6.7282 ELEKTRONIKA IR ELEKTROTECHNIKA, ISSN 1392 1215, VOL. 20, NO. 6, 2014 Effective Scheduling Algorithm and Scheduler Implementation for use with Time-Triggered
4003-440/4003-713 Operating Systems I. Process Scheduling. Warren R. Carithers ([email protected]) Rob Duncan ([email protected])
 Rob Duncan (rwd@cs.rit.edu)") 4003-440/4003-713 Operating Systems I Process Scheduling Warren R. Carithers ([email protected]) Rob Duncan ([email protected]) Review: Scheduling Policy Ideally, a scheduling policy should: Be: fair, predictable
4003-440/4003-713 Operating Systems I Process Scheduling Warren R. Carithers ([email protected]) Rob Duncan ([email protected]) Review: Scheduling Policy Ideally, a scheduling policy should: Be: fair, predictable
Operatin g Systems: Internals and Design Principle s. Chapter 10 Multiprocessor and Real-Time Scheduling Seventh Edition By William Stallings
 Operatin g Systems: Internals and Design Principle s Chapter 10 Multiprocessor and Real-Time Scheduling Seventh Edition By William Stallings Operating Systems: Internals and Design Principles Bear in mind,
Operatin g Systems: Internals and Design Principle s Chapter 10 Multiprocessor and Real-Time Scheduling Seventh Edition By William Stallings Operating Systems: Internals and Design Principles Bear in mind,
Scheduling Algorithms for Real-Time Systems
 Scheduling Algorithms for Real-Time Systems by Arezou Mohammadi A thesis submitted to the School of Computing in conformity with the requirements for the degree of Doctor of Philosophy Queen s University
Scheduling Algorithms for Real-Time Systems by Arezou Mohammadi A thesis submitted to the School of Computing in conformity with the requirements for the degree of Doctor of Philosophy Queen s University
Performance of Algorithms for Scheduling Real-Time Systems with Overrun and Overload
 Published in the Proceedings of the Eleventh Euromicro Conference on Real-Time Systems, 9-11 June 1999, held at University of York, England Performance of Algorithms for Scheduling Real-Time Systems with
Published in the Proceedings of the Eleventh Euromicro Conference on Real-Time Systems, 9-11 June 1999, held at University of York, England Performance of Algorithms for Scheduling Real-Time Systems with
Cloud Management: Knowing is Half The Battle
 Cloud Management: Knowing is Half The Battle Raouf BOUTABA David R. Cheriton School of Computer Science University of Waterloo Joint work with Qi Zhang, Faten Zhani (University of Waterloo) and Joseph
Cloud Management: Knowing is Half The Battle Raouf BOUTABA David R. Cheriton School of Computer Science University of Waterloo Joint work with Qi Zhang, Faten Zhani (University of Waterloo) and Joseph
Production Planning Solution Techniques Part 1 MRP, MRP-II
 Production Planning Solution Techniques Part 1 MRP, MRP-II Mads Kehlet Jepsen Production Planning Solution Techniques Part 1 MRP, MRP-II p.1/31 Overview Production Planning Solution Techniques Part 1 MRP,
Production Planning Solution Techniques Part 1 MRP, MRP-II Mads Kehlet Jepsen Production Planning Solution Techniques Part 1 MRP, MRP-II p.1/31 Overview Production Planning Solution Techniques Part 1 MRP,
Scheduling Resources and Costs
 Student Version CHAPTER EIGHT Scheduling Resources and Costs McGraw-Hill/Irwin Copyright 2011 by The McGraw-Hill Companies, Inc. All rights reserved. Gannt Chart Developed by Henry Gannt in 1916 is used
Student Version CHAPTER EIGHT Scheduling Resources and Costs McGraw-Hill/Irwin Copyright 2011 by The McGraw-Hill Companies, Inc. All rights reserved. Gannt Chart Developed by Henry Gannt in 1916 is used
Introduction to production scheduling. Industrial Management Group School of Engineering University of Seville
 Introduction to production scheduling Industrial Management Group School of Engineering University of Seville 1 Introduction to production scheduling Scheduling Production scheduling Gantt Chart Scheduling
Introduction to production scheduling Industrial Management Group School of Engineering University of Seville 1 Introduction to production scheduling Scheduling Production scheduling Gantt Chart Scheduling
HARD REAL-TIME SCHEDULING: THE DEADLINE-MONOTONIC APPROACH 1. Department of Computer Science, University of York, York, YO1 5DD, England.
 HARD REAL-TIME SCHEDULING: THE DEADLINE-MONOTONIC APPROACH 1 N C Audsley A Burns M F Richardson A J Wellings Department of Computer Science, University of York, York, YO1 5DD, England ABSTRACT The scheduling
HARD REAL-TIME SCHEDULING: THE DEADLINE-MONOTONIC APPROACH 1 N C Audsley A Burns M F Richardson A J Wellings Department of Computer Science, University of York, York, YO1 5DD, England ABSTRACT The scheduling
Dimensioning an inbound call center using constraint programming
 Dimensioning an inbound call center using constraint programming Cyril Canon 1,2, Jean-Charles Billaut 2, and Jean-Louis Bouquard 2 1 Vitalicom, 643 avenue du grain d or, 41350 Vineuil, France [email protected]
Dimensioning an inbound call center using constraint programming Cyril Canon 1,2, Jean-Charles Billaut 2, and Jean-Louis Bouquard 2 1 Vitalicom, 643 avenue du grain d or, 41350 Vineuil, France [email protected]
Long-term monitoring of apparent latency in PREEMPT RT Linux real-time systems
 Long-term monitoring of apparent latency in PREEMPT RT Linux real-time systems Carsten Emde Open Source Automation Development Lab (OSADL) eg Aichhalder Str. 39, 78713 Schramberg, Germany [email protected]
Long-term monitoring of apparent latency in PREEMPT RT Linux real-time systems Carsten Emde Open Source Automation Development Lab (OSADL) eg Aichhalder Str. 39, 78713 Schramberg, Germany [email protected]
Advanced Operating Systems (M) Dr Colin Perkins School of Computing Science University of Glasgow
 Dr Colin Perkins School of Computing Science University of Glasgow") Advanced Operating Systems (M) Dr Colin Perkins School of Computing Science University of Glasgow Rationale Radical changes to computing landscape; Desktop PC becoming irrelevant Heterogeneous, multicore,
Advanced Operating Systems (M) Dr Colin Perkins School of Computing Science University of Glasgow Rationale Radical changes to computing landscape; Desktop PC becoming irrelevant Heterogeneous, multicore,
Multiprocessor Scheduling and Scheduling in Linux Kernel 2.6
 Multiprocessor Scheduling and Scheduling in Linux Kernel 2.6 Winter Term 2008 / 2009 Jun.-Prof. Dr. André Brinkmann [email protected] Universität Paderborn PC² Agenda Multiprocessor and
Multiprocessor Scheduling and Scheduling in Linux Kernel 2.6 Winter Term 2008 / 2009 Jun.-Prof. Dr. André Brinkmann [email protected] Universität Paderborn PC² Agenda Multiprocessor and
Factors to Describe Job Shop Scheduling Problem
 Job Shop Scheduling Job Shop A work location in which a number of general purpose work stations exist and are used to perform a variety of jobs Example: Car repair each operator (mechanic) evaluates plus
Job Shop Scheduling Job Shop A work location in which a number of general purpose work stations exist and are used to perform a variety of jobs Example: Car repair each operator (mechanic) evaluates plus
4.2 Description of the Event operation Network (EON)
") Integrated support system for planning and scheduling... 2003/4/24 page 39 #65 Chapter 4 The EON model 4. Overview The present thesis is focused in the development of a generic scheduling framework applicable
Integrated support system for planning and scheduling... 2003/4/24 page 39 #65 Chapter 4 The EON model 4. Overview The present thesis is focused in the development of a generic scheduling framework applicable
Clustering and scheduling maintenance tasks over time
 Clustering and scheduling maintenance tasks over time Per Kreuger 2008-04-29 SICS Technical Report T2008:09 Abstract We report results on a maintenance scheduling problem. The problem consists of allocating
Clustering and scheduling maintenance tasks over time Per Kreuger 2008-04-29 SICS Technical Report T2008:09 Abstract We report results on a maintenance scheduling problem. The problem consists of allocating
A Computer Application for Scheduling in MS Project
 Comput. Sci. Appl. Volume 1, Number 5, 2014, pp. 309-318 Received: July 18, 2014; Published: November 25, 2014 Computer Science and Applications www.ethanpublishing.com Anabela Tereso, André Guedes and
Comput. Sci. Appl. Volume 1, Number 5, 2014, pp. 309-318 Received: July 18, 2014; Published: November 25, 2014 Computer Science and Applications www.ethanpublishing.com Anabela Tereso, André Guedes and
 62/9,1*7+(3$5$//(/7$6.6&+('8/,1*352%/(0%
62/9,1*7+(3$5$//(/7$6.6&+('8/,1*352%/(0% Efficient Scheduling Of On-line Services in Cloud Computing Based on Task Migration
 Efficient Scheduling Of On-line Services in Cloud Computing Based on Task Migration 1 Harish H G, 2 Dr. R Girisha 1 PG Student, 2 Professor, Department of CSE, PESCE Mandya (An Autonomous Institution under
Efficient Scheduling Of On-line Services in Cloud Computing Based on Task Migration 1 Harish H G, 2 Dr. R Girisha 1 PG Student, 2 Professor, Department of CSE, PESCE Mandya (An Autonomous Institution under
Completely Fair Scheduler and its tuning 1
 Completely Fair Scheduler and its tuning 1 Jacek Kobus and Rafał Szklarski 1 Introduction The introduction of a new, the so called completely fair scheduler (CFS) to the Linux kernel 2.6.23 (October 2007)
Completely Fair Scheduler and its tuning 1 Jacek Kobus and Rafał Szklarski 1 Introduction The introduction of a new, the so called completely fair scheduler (CFS) to the Linux kernel 2.6.23 (October 2007)
Global Multiprocessor Real-Time Scheduling as a Constraint Satisfaction Problem
 Global Multiprocessor Real-Time Scheduling as a Constraint Satisfaction Problem Liliana Cucu-Grosean & Olivier Buffet INRIA Nancy Grand-Est 615 rue du Jardin Botanique 54600 Villers-lès-Nancy, France [email protected]
Global Multiprocessor Real-Time Scheduling as a Constraint Satisfaction Problem Liliana Cucu-Grosean & Olivier Buffet INRIA Nancy Grand-Est 615 rue du Jardin Botanique 54600 Villers-lès-Nancy, France [email protected]
CHAPTER 1. Basic Concepts on Planning and Scheduling
 CHAPTER 1 Basic Concepts on Planning and Scheduling Scheduling, FEUP/PRODEI /MIEIC 1 Planning and Scheduling: Processes of Decision Making regarding the selection and ordering of activities as well as
CHAPTER 1 Basic Concepts on Planning and Scheduling Scheduling, FEUP/PRODEI /MIEIC 1 Planning and Scheduling: Processes of Decision Making regarding the selection and ordering of activities as well as
The Trip Scheduling Problem
 The Trip Scheduling Problem Claudia Archetti Department of Quantitative Methods, University of Brescia Contrada Santa Chiara 50, 25122 Brescia, Italy Martin Savelsbergh School of Industrial and Systems
The Trip Scheduling Problem Claudia Archetti Department of Quantitative Methods, University of Brescia Contrada Santa Chiara 50, 25122 Brescia, Italy Martin Savelsbergh School of Industrial and Systems
CPU Scheduling. Basic Concepts. Basic Concepts (2) Basic Concepts Scheduling Criteria Scheduling Algorithms Batch systems Interactive systems
 Basic Concepts Scheduling Criteria Scheduling Algorithms Batch systems Interactive systems") Basic Concepts Scheduling Criteria Scheduling Algorithms Batch systems Interactive systems Based on original slides by Silberschatz, Galvin and Gagne 1 Basic Concepts CPU I/O Burst Cycle Process execution
Basic Concepts Scheduling Criteria Scheduling Algorithms Batch systems Interactive systems Based on original slides by Silberschatz, Galvin and Gagne 1 Basic Concepts CPU I/O Burst Cycle Process execution
Discrete-Event Simulation
 Discrete-Event Simulation Prateek Sharma Abstract: Simulation can be regarded as the emulation of the behavior of a real-world system over an interval of time. The process of simulation relies upon the
Discrete-Event Simulation Prateek Sharma Abstract: Simulation can be regarded as the emulation of the behavior of a real-world system over an interval of time. The process of simulation relies upon the
4 The M/M/1 queue. 4.1 Time-dependent behaviour
 4 The M/M/1 queue In this chapter we will analyze the model with exponential interarrival times with mean 1/λ, exponential service times with mean 1/µ and a single server. Customers are served in order
4 The M/M/1 queue In this chapter we will analyze the model with exponential interarrival times with mean 1/λ, exponential service times with mean 1/µ and a single server. Customers are served in order