An Experimental Study on Pixy CMUcam5 Vision Sensor
|
|
|
- Erika Stevenson
- 10 years ago
- Views:
Transcription
1 LTU-ARISE Lawrence Technological University / Autonomous Robotics Institute for Supporting Education - Technical Memo ARISE An Experimental Study on Pixy CMUcam5 Vision Sensor Charles Liu* Salem High School Joy Rd Canton, MI, Christopher Geng* Northville High School Six Mile Rd, Northville, MI Faculty Advsior: Dr. CJ Chung, Professor of Computer Science & Director of ARISE at LTU 1. Introduction 2 2. Experiment setup 2.1 Pixy CMUcam5 camera and Pixymon Test setup Experimental objects 4 3. Experiment results and analysis 3.1 Regular objects Irregular shapes and features Bowling pins Different lighting conditions Conclusion 96 References 96 (*) 2015 summer research intern at Lawrence Technological University

2 LTU-ARISE Introduction Back then, the idea of having a robot see what was in front of it was only a concept. Today, vision has become a part of reality. There are many advantages to using vision. With the precise detection of objects, having a vision sensor give us more information than a laser sensor could give, such as color, position, and shape. In conjunction with the WRO 2015 University challenge, the idea to experiment with vision sensors came up. Looking at different sensors, a new sensor has come to attention. Pixy CMUcam5, developed by Carnegie Mellon University and Charmed Labs, is a small and fast vision sensor capable of recording seven different color signatures. The purposes of this study are to provide application to the WRO and insight to how Pixy camera works to people around the world. 2. Experiment equipment and setup 2.1 Pixy CMUcam5 and Pixymon The Pixy CMUcam5 camera was developed by Carnegie Mellon University and Charmed Labs. Here are some basic facts about the Pixy CMUcam5 (from its website): Small, fast, easy-to-use, low-cost, readily-available vision system Learns to detect objects that you teach it Outputs what it detects 50 times per second Connects to Arduino with included cable. Also works with Raspberry Pi, BeagleBone and similar controllers All libraries for Arduino, Raspberry Pi, etc. are provided C/C++ and Python are supported Communicates via one of several interfaces: SPI, I2C, UART, USB or analog/digital output Configuration utility runs on Windows, MacOS and Linux All software/firmare is open-source GNU-licensed

3 LTU-ARISE All hardware documentation including schematics, bill of materials, PCB layout, etc. are provided In addition, here are some more specific technical facts about the Pixy CMUcam5: Processor: NXP LPC4330, 204 MHz, dual core Image sensor: Omnivision OV9715, 1/4", 1280x800 Lens field-of-view: 75 degrees horizontal, 47 degrees vertical Lens type: standard M12 (several different types available) Power consumption: 140 ma typical Power input: USB input (5V) or unregulated input (6V to 10V) RAM: 264K bytes Flash: 1M bytes Available data outputs: UART serial, SPI, I2C, USB, digital, analog Dimensions: 2.1" x 2.0" x 1.4 Weight: 27 grams 2.2 Test setup Figure 1a Figure 1b The experiment setup (Figure 1a) consists of a Pixy CMUcam5 mounted on a Tetrix channel (to adjust for height) connected to an Arduino Uno microprocessor, which is plugged into a laptop.
 RAM: 264K bytes Flash: 1M bytes Available data outputs: UART serial, SPI, I2C, USB, digital, analog Dimensions: 2.1\" x 2.0\" x 1.4 Weight: 27 grams 2.")
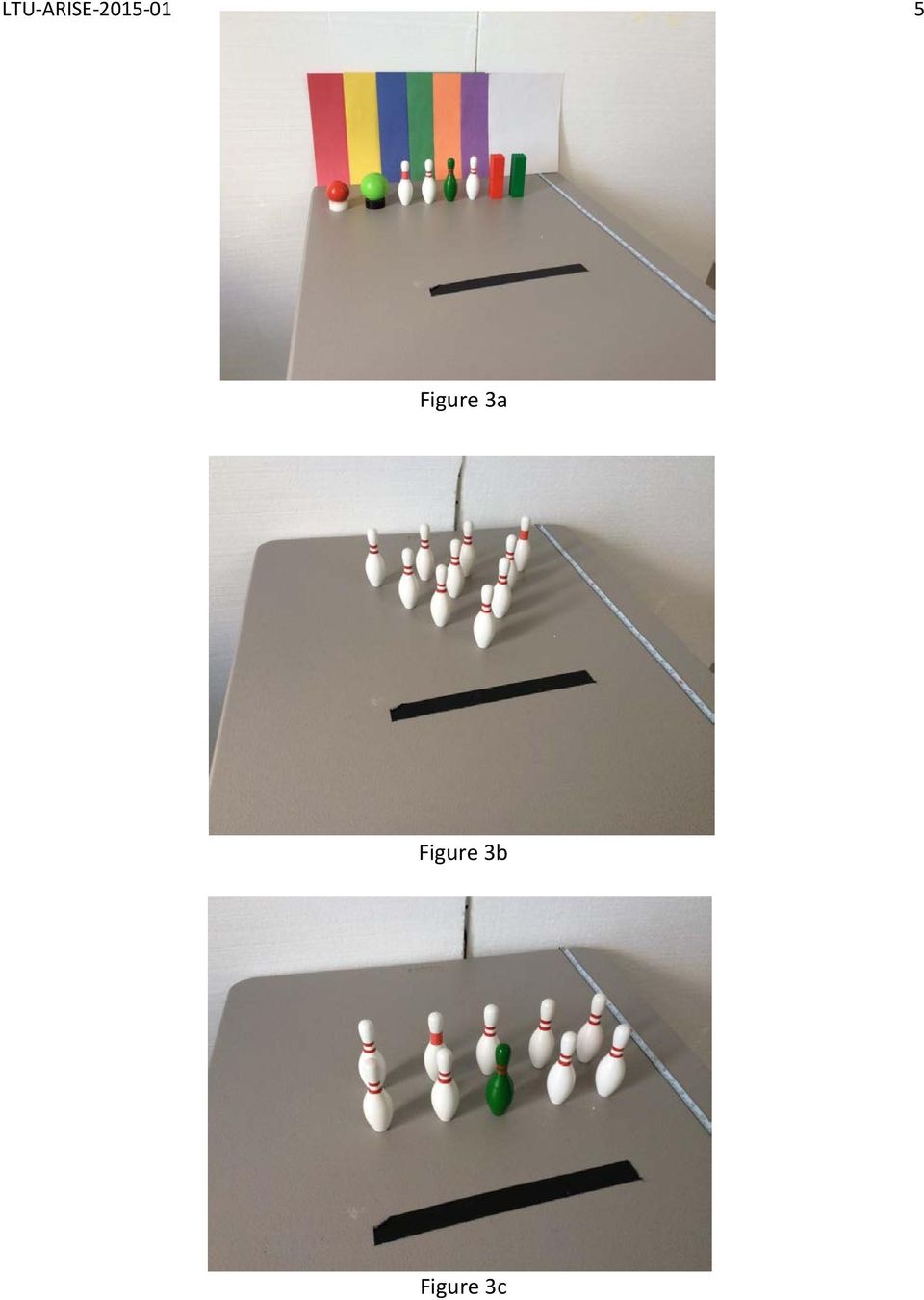
4 LTU-ARISE The Pixy camera is also connected to the computer to enable the use of Pixymon software. There are two tables which extend out to 4 meters, on which the experimental objects are placed. Two lamps were also placed on either side of the table to control the lighting for the tests on varied lighting conditions. Figure 1b is a closer view of the data acquisition system: Pixy camera, Arduino microcontroller, and NXT brick. The Pixy sends limited information to the Arduino, which then sends it through an adapter to the NXT using I2C communications. 2.1 mm 6.1 mm 12 mm 25 mm Figure 2a Figure 2b Figure 2a shows all four lens used in the experiment; the top left lens is the 2.1 mm lens that comes with the Pixy, the top right is the 6.1 mm lens, the bottom left is the 12 mm lens, and the bottom right is the 25 mm lens. Figure 2b shows the system in operation. On the computer screen are the Pixymon software, Arduino software, and Arduino serial operation, all of which provide useful data. 2.3 Experimental objects Three groups of objects were used in the experiment. The first group was seven sheets of standard colored paper (Figure 3a). The second group was made of eight irregular objects (Figure 3a). Two were spheres, one red and one green. There were also four pins, two of which had the standard double red lines at the neck, one of which had a much wider solid red line at the neck, and one which had a green body. Two more objects were blocks made of multiple Legos stacked together, one red and one green. The third group was made of pins arranged in different patterns. In Figure 3b, the pin in the top right has a thicker band for range-finding purposes. In Figure 3c, there is a green pin which matches the second round of the WRO 2015 RU bowling challenge.

5 LTU-ARISE Figure 3a Figure 3b Figure 3c
6 LTU-ARISE Experiment results and analysis 3.1 Regular objects (4 meters distance) 2.1 mm lens, Color Calibration Figure 4a Figure 4b
 2.")
7 LTU-ARISE Figure 4c Data output in Arduino serial monitor: ********************************************************* Detected 4: block 0: sig: 1 x: 130 y: 119 width: 12 height: 17 block 1: sig: 2 x: 145 y: 117 width: 12 height: 11 block 2: sig: 3 x: 158 y: 119 width: 12 height: 11 block 3: sig: 4 x: 171 y: 122 width: 9 height: 15 Detected 4: block 0: sig: 1 x: 130 y: 119 width: 12 height: 17 block 1: sig: 2 x: 144 y: 120 width: 11 height: 17 block 2: sig: 3 x: 159 y: 117 width: 12 height: 5 block 3: sig: 4 x: 172 y: 122 width: 10 height: 12 Detected 4: block 0: sig: 1 x: 130 y: 119 width: 12 height: 17 block 1: sig: 2 x: 145 y: 119 width: 12 height: 12 block 2: sig: 3 x: 158 y: 122 width: 10 height: 4 block 3: sig: 4 x: 171 y: 128 width: 9 height: 8 Detected 4: block 0: sig: 1 x: 130 y: 119 width: 12 height: 17 block 1: sig: 2 x: 144 y: 120 width: 11 height: 16 block 2: sig: 3 x: 157 y: 124 width: 11 height: 8 block 3: sig: 4 x: 172 y: 121 width: 10 height

8 LTU-ARISE mm lens Color Calibration Figure 5a Figure 5b

9 LTU-ARISE Data output in Arduino serial monitor: Figure 5c ********************************************************* Detected 6: block 0: sig: 1 x: 114 y: 118 width: 8 height: 37 block 1: sig: 2 x: 123 y: 119 width: 7 height: 38 block 2: sig: 3 x: 134 y: 122 width: 10 height: 32 block 3: sig: 4 x: 146 y: 119 width: 10 height: 37 block 4: sig: 5 x: 158 y: 120 width: 12 height: 38 block 5: sig: 6 x: 170 y: 120 width: 10 height: 36 Detected 6: block 0: sig: 1 x: 114 y: 118 width: 8 height: 37 block 1: sig: 2 x: 123 y: 119 width: 7 height: 38 block 2: sig: 3 x: 135 y: 121 width: 10 height: 34 block 3: sig: 4 x: 146 y: 120 width: 10 height: 38 block 4: sig: 5 x: 157 y: 124 width: 11 height: 29 block 5: sig: 6 x: 170 y: 121 width: 11 height: 38 Detected 6: block 0: sig: 1 x: 114 y: 118 width: 8 height: 37 block 1: sig: 2 x: 124 y: 119 width: 8 height: 38 block 2: sig: 3 x: 134 y: 119 width: 10 height: 38 block 3: sig: 4 x: 146 y: 120 width: 10 height: 38 block 4: sig: 5 x: 157 y: 120 width: 11 height: 38 block 5: sig: 6 x: 170 y: 121 width: 12 height:

10 LTU-ARISE mm lens Color Calibration Figure 6a Figure 6b

11 LTU-ARISE Figure 6c Data output in Arduino serial monitor: ********************************************************* Detected 6: block 0: sig: 1 x: 104 y: 128 width: 17 height: 73 block 1: sig: 2 x: 123 y: 129 width: 17 height: 74 block 2: sig: 3 x: 143 y: 130 width: 20 height: 72 block 3: sig: 4 x: 164 y: 137 width: 20 height: 59 block 4: sig: 5 x: 187 y: 131 width: 24 height: 74 block 5: sig: 6 x: 209 y: 133 width: 21 height: 69 Detected 7: block 0: sig: 1 x: 104 y: 128 width: 17 height: 73 block 1: sig: 2 x: 123 y: 129 width: 17 height: 74 block 2: sig: 3 x: 143 y: 129 width: 20 height: 73 block 3: sig: 4 x: 164 y: 130 width: 19 height: 72 block 4: sig: 5 x: 187 y: 131 width: 24 height: 74 block 5: sig: 6 x: 210 y: 137 width: 21 height: 61 block 6: sig: 6 x: 209 y: 99 width: 19 height: 4 Detected 8: block 0: sig: 1 x: 104 y: 128 width: 17 height: 73 block 1: sig: 2 x: 123 y: 113 width: 17 height: 43 block 2: sig: 2 x: 122 y: 157 width: 17 height: 18 block 3: sig: 3 x: 143 y: 132 width: 19 height: 67 block 4: sig: 4 x: 164 y: 130 width: 20 height: 74 block 5: sig: 5 x: 187 y: 130 width: 24 height: 73 block 6: sig: 6 x: 209 y: 139 width: 21 height: 58 block 7: sig: 6 x: 210 y: 97 width: 18 height: 4

12 LTU-ARISE mm lens Color Calibration Figure 7a Figure 7b

13 LTU-ARISE Detected 6: block 0: sig: 1 x: 52 y: 104 width: 38 height: 155 block 1: sig: 2 x: 92 y: 104 width: 40 height: 157 block 2: sig: 3 x: 134 y: 104 width: 44 height: 159 block 3: sig: 4 x: 178 y: 105 width: 43 height: 158 block 4: sig: 5 x: 226 y: 105 width: 50 height: 158 block 5: sig: 6 x: 275 y: 105 width: 49 height: 159 Detected 6: block 0: sig: 1 x: 52 y: 104 width: 38 height: 155 block 1: sig: 2 x: 91 y: 104 width: 41 height: 157 block 2: sig: 3 x: 134 y: 104 width: 44 height: 159 block 3: sig: 4 x: 178 y: 105 width: 43 height: 158 block 4: sig: 5 x: 226 y: 105 width: 50 height: 157 block 5: sig: 6 x: 275 y: 105 width: 48 height: 159 Detected 6: block 0: sig: 1 x: 52 y: 104 width: 38 height: 155 block 1: sig: 2 x: 92 y: 104 width: 40 height: 157 block 2: sig: 3 x: 134 y: 104 width: 44 height: 159 block 3: sig: 4 x: 178 y: 105 width: 43 height: 157 block 4: sig: 5 x: 225 y: 105 width: 49 height: 157 block 5: sig: 6 x: 275 y: 105 width: 48 height: 159 Figure 7c

14 LTU-ARISE Comparison of center coordinates, width, and height for different signatures and lenses: X Position mm lens 12mm lens 25mm lens 2.1mm lens Signature Number Figure 8a Y Position mm lens 12mm lens 25mm lens 2.1mm lens Signature Number Figure 8b

15 LTU-ARISE Width mm lens 12mm lens 25mm lens 2.1mm lens Signature Number Figure 8c Height mm lens 12mm lens 25mm lens 2.1mm lens Signature Number Figure 8d

16 LTU-ARISE Observations on Pixy detection of regular objects: 1. From Figures 4a, 5a, 6a, and 7a, it is easy to see that lenses with larger magnifications have smaller fields of view (FOV) 2. The 2.1 mm lens cannot see all 6 colored sheets of paper reliably at this distance; its ability to detect the signatures fluctuates 3. The other three lens have no trouble seeing all 6 colors with stable output 4. Figure 8a shows the effect of the lens' magnification on the actual x-value (for example, the 25 mm lens has the smallest reading for signature 1 but the largest reading for signature 6) 5. Figure 8b shows that the 7-values are relatively constant, reflecting the similar heights of the pieces of paper 6. Figures 8c and 8d show that widths and heights vary widely for each signature for different lenses (because of different fields of vision), but are relatively constant across the signatures for each lens

17 LTU-ARISE Irregular shapes and features 2.1 mm Lens, 0.5 m Distance Figure 9a Figure 9b

18 LTU-ARISE Figure 9c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 235 y: 134 width: 18 height: 55 block 1: sig: 1 x: 70 y: 123 width: 13 height: 18 block 2: sig: 1 x: 144 y: 115 width: 7 height: 8 block 3: sig: 2 x: 107 y: 124 width: 30 height: 29

19 LTU-ARISE mm Lens, 1 m Distance Figure 10 Figure 10b

20 LTU-ARISE Figure 10c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 203 y: 127 width: 7 height: 29 block 1: sig: 1 x: 112 y: 121 width: 5 height: 10 block 2: sig: 1 x: 156 y: 116 width: 2 height: 3 block 3: sig: 2 x: 135 y: 121 width: 17 height: 15

21 LTU-ARISE mm lens, 2.5 m Distance Figure 11a Figure 11b
22 LTU-ARISE Figure 11c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 177 y: 123 width: 3 height: 10 block 1: sig: 1 x: 144 y: 120 width: 3 height: 3 block 2: sig: 2 x: 150 y: 121 width: 2 height: 2
23 LTU-ARISE mm Lens, 3 m Distance Figure 12a Figure 12b
24 LTU-ARISE Figure 12c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 182 y: 123 width: 2 height: 8 block 1: sig: 1 x: 152 y: 121 width: 3 height: 2 block 2: sig: 2 x: 157 y: 122 width: 3 height: 2
25 LTU-ARISE mm Lens, 4 m distance Figure 13a Figure 13b
26 LTU-ARISE Figure 13c Data output in Arduino serial monitor: ********************************************************* No values Summary table
27 LTU-ARISE mm lens, 0.5 m distance Figure 14a Figure 14b
28 LTU-ARISE Figure 14c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 288 y: 141 width: 50 height: 116 block 1: sig: 1 x: 118 y: 111 width: 18 height: 20 block 2: sig: 1 x: 170 y: 109 width: 14 height: 4 block 3: sig: 1 x: 214 y: 109 width: 15 height: 4 block 4: sig: 1 x: 168 y: 121 width: 16 height: 4 block 5: sig: 1 x: 213 y: 119 width: 12 height: 2 block 6: sig: 1 x: 1 y: 140 width: 2 height: 15 block 7: sig: 2 x: 49 y: 137 width: 72 height: 69 block 8: sig: 2 x: 315 y: 172 width: 10 height: 54 block 9: sig: 2 x: 207 y: 137 width: 37 height: 29 block 10: sig: 2 x: 214 y: 84 width: 17 height: 6 block 11: sig: 2 x: 315 y: 129 width: 5 height: 19 block 12: sig: 2 x: 198 y: 174 width: 5 height: 18 block 13: sig: 2 x: 317 y: 108 width: 6 height: 4 block 14: sig: 2 x: 317 y: 98 width: 6 height: 2 block 15: sig: 2 x: 316 y: 89 width: 5 height: 2 block 16: sig: 2 x: 134 y: 142 width: 3 height:
29 LTU-ARISE mm lens, 1 m distance Figure 15a Figure 15b
30 LTU-ARISE Figure 15c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 59 y: 127 width: 27 height: 25 block 1: sig: 1 x: 231 y: 133 width: 34 height: 66 block 2: sig: 1 x: 141 y: 113 width: 10 height: 10 block 3: sig: 1 x: 165 y: 112 width: 5 height: 2 block 4: sig: 2 x: 101 y: 127 width: 36 height: 36 block 5: sig: 2 x: 189 y: 135 width: 18 height: 32 block 6: sig: 2 x: 94 y: 194 width: 21 height: 2 block 7: sig: 2 x: 266 y: 135 width: 19 height: 58 block 8: sig: 2 x: 315 y: 126 width: 2 height: 4 block 9: sig: 2 x: 187 y: 58 width: 4 height: 3 block 10: sig: 2 x: 137 y: 120 width: 3 height: 2 block 11: sig: 2 x: 319 y: 39 width: 2 height: mm lens, 2.5 m distance
31 LTU-ARISE Figure 16a Figure 16b
32 LTU-ARISE Figure 16c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 191 y: 124 width: 6 height: 23 block 1: sig: 1 x: 120 y: 122 width: 9 height: 9 block 2: sig: 2 x: 138 y: 124 width: 5 height: 10 block 3: sig: 2 x: 205 y: 122 width: 3 height: 13 block 4: sig: 2 x: 265 y: 128 width: 2 height: 5 block 5: sig: 2 x: 265 y: 111 width: 3 height: 4 block 6: sig: 2 x: 317 y: 45 width: 2 height: 3 block 7: sig: 2 x: 264 y: 141 width: 3 height: 2 block 8: sig: 2 x: 79 y: 101 width: 2 height: 2 block 9: sig: 2 x: 317 y: 59 width: 4 height: 2 block 10: sig: 2 x: 168 y: 125 width: 2 height: 2 block 11: sig: 2 x: 318 y: 12 width: 3 height: 2
33 LTU-ARISE mm lens, 3 m distance Figure 17a Figure 17b
34 LTU-ARISE Figure 17c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 110 y: 120 width: 8 height: 6 block 1: sig: 1 x: 165 y: 119 width: 5 height: 16 block 2: sig: 2 x: 288 y: 108 width: 3 height: 3 block 3: sig: 2 x: 287 y: 118 width: 3 height: 3 block 4: sig: 2 x: 290 y: 62 width: 3 height: 3 block 5: sig: 2 x: 121 y: 118 width: 11 height: 2 block 6: sig: 2 x: 239 y: 126 width: 2 height: 2 block 7: sig: 2 x: 304 y: 79 width: 5 height: 2 block 8: sig: 2 x: 232 y: 80 width: 3 height: 2
35 LTU-ARISE mm lens, 4 m distance Figure 18a Figure 18b
36 LTU-ARISE Figure 18c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 186 y: 121 width: 4 height: 14 block 1: sig: 1 x: 142 y: 121 width: 5 height: 5 block 2: sig: 2 x: 148 y: 121 width: 4 height: 2 block 3: sig: 2 x: 196 y: 118 width: 2 height: 2 block 4: sig: 2 x: 319 y: 150 width: 2 height: 2 block 5: sig: 2 x: 256 y: 111 width: 3 height: 2 block 6: sig: 2 x: 153 y: 125 width: 4 height: 2 block 7: sig: 2 x: 255 y: 94 width: 2 height: 2 Summary Table
37 LTU-ARISE mm lens, 0.5 m distance Figure 19a Figure 19b
38 LTU-ARISE Figure 19c block 0: sig: 1 x: 49 y: 122 width: 34 height: 43 block 1: sig: 1 x: 296 y: 166 width: 46 height: 61 block 2: sig: 1 x: 290 y: 87 width: 34 height: 52 block 3: sig: 1 x: 126 y: 137 width: 34 height: 10 block 4: sig: 1 x: 204 y: 128 width: 14 height: 7 block 5: sig: 1 x: 124 y: 114 width: 22 height: 11 block 6: sig: 1 x: 201 y: 109 width: 12 height: 9 block 7: sig: 2 x: 191 y: 182 width: 15 height: 34 block 8: sig: 2 x: 9 y: 74 width: 2 height: 18 block 9: sig: 2 x: 197 y: 64 width: 11 height: 15 block 10: sig: 2 x: 195 y: 154 width: 13 height: 8 block 11: sig: 2 x: 13 y: 58 width: 2 height: 6 block 12: sig: 2 x: 201 y: 142 width: 4 height: 4 block 13: sig: 2 x: 14 y: 185 width: 3 height: 4 block 14: sig: 2 x: 257 y: 184 width: 3 height: 4 block 15: sig: 2 x: 2 y: 173 width: 5 height: 17 block 16: sig: 2 x: 40 y: 61 width: 3 height: 4 block 17: sig: 2 x: 235 y: 164 width: 2 height: 3 block 18: sig: 2 x: 173 y: 191 width: 3 height: 10 block 19: sig: 2 x: 228 y: 82 width: 3 height: 2 block 20: sig: 2 x: 190 y: 79 width: 2 height: 2 block 21: sig: 2 x: 229 y: 66 width: 2 height: 2
39 LTU-ARISE mm lens, 1 m distance Figure 20a Figure 20b
40 LTU-ARISE Figure 20c block 0: sig: 1 x: 112 y: 118 width: 18 height: 21 block 1: sig: 1 x: 278 y: 169 width: 49 height: 60 block 2: sig: 1 x: 6 y: 147 width: 13 height: 30 block 3: sig: 1 x: 246 y: 115 width: 14 height: 45 block 4: sig: 1 x: 160 y: 116 width: 13 height: 4 block 5: sig: 1 x: 161 y: 127 width: 10 height: 4 block 6: sig: 1 x: 10 y: 171 width: 5 height: 4 block 7: sig: 1 x: 206 y: 112 width: 13 height: 3 block 8: sig: 1 x: 206 y: 122 width: 11 height: 2 block 9: sig: 1 x: 299 y: 92 width: 2 height: 2 block 10: sig: 2 x: 51 y: 173 width: 56 height: 18 block 11: sig: 2 x: 30 y: 141 width: 19 height: 7 block 12: sig: 2 x: 9 y: 110 width: 7 height: 37 block 13: sig: 2 x: 34 y: 121 width: 14 height: 14 block 14: sig: 2 x: 309 y: 134 width: 4 height: 93 block 15: sig: 2 x: 195 y: 148 width: 8 height: 18 block 16: sig: 2 x: 309 y: 191 width: 6 height: 16 block 17: sig: 2 x: 24 y: 44 width: 9 height: 17 block 18: sig: 2 x: 13 y: 63 width: 6 height: 5 block 19: sig: 2 x: 82 y: 139 width: 6 height: 3 block 20: sig: 2 x: 219 y: 152 width: 5 height: 10 block 21: sig: 2 x: 192 y: 187 width: 3 height: 4
41 LTU-ARISE mm lens, 2.5 m distance Figure 21a Figure 21b
42 LTU-ARISE Figure 21c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 139 y: 124 width: 6 height: 7 block 1: sig: 1 x: 86 y: 134 width: 9 height: 10 block 2: sig: 1 x: 87 y: 146 width: 6 height: 2 block 3: sig: 2 x: 6 y: 111 width: 5 height: 92 block 4: sig: 2 x: 246 y: 128 width: 14 height: 34 block 5: sig: 2 x: 14 y: 51 width: 5 height: 15 block 6: sig: 2 x: 251 y: 156 width: 4 height: 4 block 7: sig: 2 x: 241 y: 156 width: 4 height: 4 block 8: sig: 2 x: 22 y: 42 width: 5 height: 2 block 9: sig: 2 x: 11 y: 163 width: 2 height: 3 block 10: sig: 2 x: 177 y: 117 width: 2 height: 3 block 11: sig: 2 x: 199 y: 134 width: 3 height: 3 block 12: sig: 2 x: 309 y: 31 width: 6 height: 3 block 13: sig: 2 x: 41 y: 193 width: 2 height: 2 block 14: sig: 2 x: 173 y: 145 width: 3 height: 2 block 15: sig: 2 x: 163 y: 136 width: 3 height: 2
43 LTU-ARISE mm lens, 3 m distance Figure 22a Figure 22b
44 LTU-ARISE Figure 22c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 149 y: 126 width: 4 height: 6 block 1: sig: 1 x: 209 y: 152 width: 9 height: 2 block 2: sig: 1 x: 103 y: 134 width: 6 height: 2 block 3: sig: 2 x: 16 y: 40 width: 9 height: 9 block 4: sig: 2 x: 165 y: 136 width: 4 height: 9 block 5: sig: 2 x: 35 y: 192 width: 2 height: 12 block 6: sig: 2 x: 304 y: 33 width: 3 height: 4 block 7: sig: 2 x: 27 y: 34 width: 6 height: 2 block 8: sig: 2 x: 7 y: 52 width: 6 height: 2 block 9: sig: 2 x: 37 y: 22 width: 2 height: 3 block 10: sig: 2 x: 137 y: 134 width: 3 height: 2
45 LTU-ARISE mm lens, 4 m distance Figure 23a Figure 23b
46 LTU-ARISE block 0: sig: 1 x: 127 y: 131 width: 10 height: 7 block 1: sig: 2 x: 175 y: 137 width: 7 height: 5 block 2: sig: 2 x: 144 y: 137 width: 8 height: 9 block 3: sig: 2 x: 24 y: 28 width: 9 height: 3 block 4: sig: 2 x: 316 y: 41 width: 8 height: 4 block 5: sig: 2 x: 6 y: 38 width: 5 height: 2 block 6: sig: 2 x: 289 y: 31 width: 4 height: 4 block 7: sig: 2 x: 299 y: 35 width: 5 height: 2 Summary Table Figure 23c
47 LTU-ARISE mm lens, 0.5 m distance Figure 24a Figure 24b
48 LTU-ARISE Figure 24c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 59 y: 93 width: 70 height: 26 block 1: sig: 1 x: 246 y: 83 width: 71 height: 23 block 2: sig: 1 x: 59 y: 143 width: 72 height: 26 block 3: sig: 1 x: 246 y: 124 width: 67 height: 17 block 4: sig: 2 x: 246 y: 36 width: 90 height: 72 block 5: sig: 2 x: 246 y: 166 width: 105 height: 65 block 6: sig: 2 x: 245 y: 106 width: 66 height: 23
49 LTU-ARISE mm lens, 1 m distance Figure 25a Figure 25b
50 LTU-ARISE Figure 25c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 295 y: 117 width: 48 height: 151 block 1: sig: 1 x: 33 y: 113 width: 38 height: 48 block 2: sig: 1 x: 116 y: 104 width: 31 height: 12 block 3: sig: 1 x: 202 y: 99 width: 34 height: 11 block 4: sig: 1 x: 118 y: 129 width: 33 height: 11 block 5: sig: 1 x: 201 y: 120 width: 31 height: 8 block 6: sig: 2 x: 200 y: 162 width: 81 height: 74 block 7: sig: 2 x: 201 y: 61 width: 46 height: 64 block 8: sig: 2 x: 200 y: 111 width: 32 height: 10 block 9: sig: 2 x: 268 y: 154 width: 3 height: 3
51 LTU-ARISE mm lens, 2.5 m distance Figure 26a Figure 26b
52 LTU-ARISE Figure 26c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 258 y: 148 width: 39 height: 99 block 1: sig: 1 x: 40 y: 160 width: 40 height: 41 block 2: sig: 1 x: 138 y: 129 width: 14 height: 18 block 3: sig: 1 x: 203 y: 124 width: 10 height: 2 block 4: sig: 1 x: 166 y: 134 width: 3 height: 2 block 5: sig: 2 x: 95 y: 153 width: 62 height: 55 block 6: sig: 2 x: 291 y: 149 width: 27 height: 99 block 7: sig: 2 x: 202 y: 166 width: 30 height: 64 block 8: sig: 2 x: 201 y: 109 width: 16 height: 21 block 9: sig: 2 x: 137 y: 109 width: 4 height: 18 block 10: sig: 2 x: 169 y: 104 width: 4 height: 8 block 11: sig: 2 x: 232 y: 104 width: 5 height: 6
53 LTU-ARISE mm lens, 3 m distance Figure 27a Figure 27b
54 LTU-ARISE Figure 27c Data output in Arduino serial monitor: ********************************************************* block 0: sig: 1 x: 251 y: 151 width: 40 height: 84 block 1: sig: 1 x: 55 y: 164 width: 37 height: 34 block 2: sig: 1 x: 140 y: 136 width: 11 height: 14 block 3: sig: 2 x: 284 y: 150 width: 27 height: 83 block 4: sig: 2 x: 104 y: 157 width: 53 height: 45 block 5: sig: 2 x: 191 y: 151 width: 43 height: 83 block 6: sig: 2 x: 141 y: 119 width: 5 height: 15 block 7: sig: 2 x: 229 y: 118 width: 5 height: 16 block 8: sig: 2 x: 230 y: 145 width: 4 height: 3
55 LTU-ARISE mm lens, 4 m distance Figure 28a Figure 28b
56 LTU-ARISE Figure 28c block 0: sig: 1 x: 258 y: 142 width: 17 height: 63 block 1: sig: 1 x: 58 y: 151 width: 26 height: 24 block 2: sig: 1 x: 129 y: 131 width: 7 height: 10 block 3: sig: 1 x: 159 y: 129 width: 6 height: 2 block 4: sig: 2 x: 92 y: 147 width: 35 height: 34 block 5: sig: 2 x: 300 y: 140 width: 19 height: 61 block 6: sig: 2 x: 192 y: 154 width: 18 height: 37 block 7: sig: 2 x: 191 y: 117 width: 9 height: 13 Summary Table
57 LTU-ARISE Observations on Pixy detection of irregular objects and small features: 1. Even the 2.1mm lens can see small features at closer ranges (Figures 9b and 9c) but loses the ability to see even the large objects at longer ranges (Figures 13b and 13c) 2. The 25 mm lens can see even the smallest features at the longest ranges (Figures 28b and 28c) 3. No matter the shape of the object, it is detected as a block 4. Regularly shaped objects are easier to detect (Figures 21b and 21c) 5. The FOV of each lens affects how many objects it can see (Figure 24b) 6. Some of the pictures picked up outside interference (noise) as signatures (i.e Figure 21c)
58 LTU-ARISE Bowling pins Actual WRO 2015 Bowling Round 1 Setup (3.6 meters away, 25 mm Camera) Figure 29a Figure 29b
59 LTU-ARISE Data output in Arduino serial monitor: ********************************************************* Detected 9: block 0: sig: 1 x: 277 y: 135 width: 9 height: 11 block 1: sig: 1 x: 136 y: 133 width: 9 height: 9 block 2: sig: 1 x: 170 y: 134 width: 9 height: 9 block 3: sig: 1 x: 209 y: 135 width: 9 height: 9 block 4: sig: 1 x: 106 y: 132 width: 7 height: 9 block 5: sig: 1 x: 238 y: 132 width: 7 height: 3 block 6: sig: 1 x: 72 y: 127 width: 5 height: 2 block 7: sig: 1 x: 238 y: 139 width: 9 height: 2 block 8: sig: 1 x: 241 y: 108 width: 3 height: 8 Detected 8: block 0: sig: 1 x: 278 y: 135 width: 10 height: 12 block 1: sig: 1 x: 136 y: 133 width: 9 height: 9 block 2: sig: 1 x: 170 y: 134 width: 9 height: 9 block 3: sig: 1 x: 209 y: 135 width: 9 height: 9 block 4: sig: 1 x: 239 y: 135 width: 10 height: 9 block 5: sig: 1 x: 107 y: 132 width: 8 height: 8 block 6: sig: 1 x: 73 y: 127 width: 7 height: 3 block 7: sig: 1 x: 241 y: 107 width: 3 height: 8 Detected 8: block 0: sig: 1 x: 277 y: 135 width: 9 height: 11 block 1: sig: 1 x: 171 y: 134 width: 11 height: 9 block 2: sig: 1 x: 209 y: 135 width: 9 height: 10 block 3: sig: 1 x: 136 y: 133 width: 9 height: 9 block 4: sig: 1 x: 237 y: 135 width: 5 height: 9 block 5: sig: 1 x: 107 y: 132 width: 7 height: 9 block 6: sig: 1 x: 73 y: 130 width: 7 height: 9 block 7: sig: 1 x: 241 y: 108 width: 3 height: 8
60 LTU-ARISE Next we will try detecting the pins from a different location, different camera angle. Different Camera Angle Figure 30a Figure 30b
61 LTU-ARISE Next we will try to detect the pins in the Round 2 formation (which includes a green pin) Actual WRO 2015 Bowling Round 2 Setup (3.6 meters away, 25 mm Camera) Figure 31a Figure 31b
62 LTU-ARISE Data output in Arduino serial monitor: ********************************************************* Detected 7: block 0: sig: 1 x: 175 y: 62 width: 13 height: 10 block 1: sig: 1 x: 225 y: 65 width: 17 height: 8 block 2: sig: 1 x: 130 y: 61 width: 9 height: 8 block 3: sig: 1 x: 75 y: 55 width: 5 height: 2 block 4: sig: 1 x: 30 y: 56 width: 5 height: 8 block 5: sig: 2 x: 175 y: 86 width: 17 height: 41 block 6: sig: 2 x: 178 y: 50 width: 6 height: 13 Detected 7: block 0: sig: 1 x: 175 y: 61 width: 13 height: 11 block 1: sig: 1 x: 224 y: 65 width: 15 height: 8 block 2: sig: 1 x: 130 y: 61 width: 9 height: 8 block 3: sig: 1 x: 75 y: 58 width: 5 height: 8 block 4: sig: 1 x: 31 y: 56 width: 6 height: 8 block 5: sig: 2 x: 175 y: 87 width: 17 height: 39 block 6: sig: 2 x: 177 y: 50 width: 7 height: 14 Detected 8: block 0: sig: 1 x: 175 y: 61 width: 13 height: 11 block 1: sig: 1 x: 224 y: 65 width: 15 height: 8 block 2: sig: 1 x: 129 y: 61 width: 9 height: 8 block 3: sig: 1 x: 74 y: 58 width: 5 height: 8 block 4: sig: 1 x: 31 y: 53 width: 6 height: 2 block 5: sig: 1 x: 31 y: 59 width: 9 height: 2 block 6: sig: 2 x: 175 y: 86 width: 17 height: 41 block 7: sig: 2 x: 178 y: 50 width: 9 height: 12 Detected 7: block 0: sig: 1 x: 175 y: 62 width: 13 height: 10 block 1: sig: 1 x: 225 y: 65 width: 16 height: 9 block 2: sig: 1 x: 130 y: 61 width: 9 height: 8 block 3: sig: 1 x: 75 y: 55 width: 6 height: 2 block 4: sig: 1 x: 30 y: 56 width: 6 height: 8 block 5: sig: 2 x: 175 y: 88 width: 17 height: 38 block 6: sig: 2 x: 177 y: 50 width: 6 height: 13 Detected 7: block 0: sig: 1 x: 175 y: 62 width: 13 height: 10 block 1: sig: 1 x: 224 y: 65 width: 15 height: 8 block 2: sig: 1 x: 129 y: 61 width: 9 height: 8 block 3: sig: 1 x: 75 y: 58 width: 5 height: 8 block 4: sig: 1 x: 31 y: 56 width: 6 height: 8 block 5: sig: 2 x: 176 y: 88 width: 18 height: 38 block 6: sig: 2 x: 177 y: 51 width: 6 height: 12
63 LTU-ARISE At different camera angles Figure 32a Figure 32b
64 LTU-ARISE Detected 9: block 0: sig: 1 x: 161 y: 64 width: 5 height: 10 block 1: sig: 1 x: 204 y: 65 width: 6 height: 8 block 2: sig: 1 x: 224 y: 62 width: 5 height: 2 block 3: sig: 1 x: 178 y: 62 width: 5 height: 2 block 4: sig: 1 x: 129 y: 62 width: 5 height: 2 block 5: sig: 1 x: 81 y: 62 width: 5 height: 2 block 6: sig: 1 x: 69 y: 62 width: 5 height: 2 block 7: sig: 1 x: 24 y: 64 width: 5 height: 8 block 8: sig: 2 x: 270 y: 78 width: 17 height: 64 Detected 11: block 0: sig: 1 x: 163 y: 64 width: 9 height: 10 block 1: sig: 1 x: 178 y: 65 width: 7 height: 8 block 2: sig: 1 x: 25 y: 64 width: 6 height: 8 block 3: sig: 1 x: 204 y: 65 width: 6 height: 8 block 4: sig: 1 x: 224 y: 62 width: 5 height: 2 block 5: sig: 1 x: 129 y: 62 width: 5 height: 2 block 6: sig: 1 x: 82 y: 62 width: 6 height: 2 block 7: sig: 1 x: 112 y: 62 width: 7 height: 2 block 8: sig: 1 x: 270 y: 61 width: 5 height: 2 block 9: sig: 2 x: 270 y: 88 width: 17 height: 41 block 10: sig: 2 x: 270 y: 52 width: 6 height: 13 Detected 10: block 0: sig: 1 x: 163 y: 64 width: 9 height: 10 block 1: sig: 1 x: 225 y: 62 width: 6 height: 2 block 2: sig: 1 x: 70 y: 62 width: 6 height: 2 block 3: sig: 1 x: 204 y: 65 width: 5 height: 8 block 4: sig: 1 x: 178 y: 62 width: 5 height: 2 block 5: sig: 1 x: 129 y: 62 width: 5 height: 2 block 6: sig: 1 x: 82 y: 62 width: 6 height: 2 block 7: sig: 1 x: 24 y: 64 width: 5 height: 8 block 8: sig: 1 x: 113 y: 62 width: 7 height: 2 block 9: sig: 2 x: 270 y: 78 width: 17 height: 64 Detected 9: block 0: sig: 1 x: 161 y: 64 width: 5 height: 10 block 1: sig: 1 x: 205 y: 62 width: 6 height: 2 block 2: sig: 1 x: 69 y: 65 width: 7 height: 8 block 3: sig: 1 x: 25 y: 61 width: 6 height: 2 block 4: sig: 1 x: 177 y: 62 width: 5 height: 2 block 5: sig: 1 x: 128 y: 62 width: 5 height: 2 block 6: sig: 1 x: 223 y: 62 width: 5 height: 2 block 7: sig: 1 x: 81 y: 62 width: 5 height: 2 block 8: sig: 2 x: 270 y: 78 width: 16 height: 64
65 LTU-ARISE And now for a Different Green Pin Position Figure 33a Figure 33b
66 LTU-ARISE Detected 6: block 0: sig: 1 x: 216 y: 71 width: 10 height: 10 block 1: sig: 1 x: 29 y: 69 width: 13 height: 9 block 2: sig: 1 x: 271 y: 69 width: 9 height: 2 block 3: sig: 1 x: 94 y: 67 width: 5 height: 2 block 4: sig: 2 x: 153 y: 94 width: 17 height: 41 block 5: sig: 2 x: 154 y: 58 width: 7 height: 14 Detected 7: block 0: sig: 1 x: 215 y: 71 width: 9 height: 10 block 1: sig: 1 x: 30 y: 69 width: 14 height: 9 block 2: sig: 1 x: 271 y: 69 width: 9 height: 2 block 3: sig: 1 x: 94 y: 67 width: 5 height: 2 block 4: sig: 1 x: 153 y: 67 width: 6 height: 2 block 5: sig: 2 x: 153 y: 95 width: 17 height: 41 block 6: sig: 2 x: 154 y: 58 width: 7 height: 14 Detected 8: block 0: sig: 1 x: 216 y: 71 width: 10 height: 10 block 1: sig: 1 x: 30 y: 66 width: 13 height: 3 block 2: sig: 1 x: 30 y: 72 width: 15 height: 3 block 3: sig: 1 x: 271 y: 69 width: 9 height: 2 block 4: sig: 1 x: 94 y: 67 width: 5 height: 2 block 5: sig: 1 x: 153 y: 67 width: 6 height: 2 block 6: sig: 2 x: 154 y: 95 width: 18 height: 42 block 7: sig: 2 x: 154 y: 58 width: 7 height: 14 Detected 7: block 0: sig: 1 x: 216 y: 71 width: 10 height: 10 block 1: sig: 1 x: 30 y: 69 width: 13 height: 9 block 2: sig: 1 x: 271 y: 69 width: 9 height: 2 block 3: sig: 1 x: 94 y: 67 width: 5 height: 2 block 4: sig: 1 x: 153 y: 67 width: 6 height: 2 block 5: sig: 2 x: 153 y: 95 width: 17 height: 42 block 6: sig: 2 x: 154 y: 58 width: 6 height: 13
67 LTU-ARISE Observations on Pixy detection of WRO RU challenge pins: 1. With appropriate range adjustment, the 25 mm lens can detect the small features on the white pins 2. The 25 mm lens has no problems detecting the green pin no matter the pattern of the pins
68 LTU-ARISE Different lighting conditions 25 mm lens at 4 meter distance, light is 0.5 m from objects Figure 34a Figure 34b
69 LTU-ARISE Figure 34c Detected 9: block 0: sig: 1 x: 250 y: 135 width: 18 height: 64 block 1: sig: 1 x: 43 y: 136 width: 21 height: 19 block 2: sig: 1 x: 117 y: 121 width: 9 height: 10 block 3: sig: 1 x: 211 y: 123 width: 7 height: 8 block 4: sig: 1 x: 176 y: 118 width: 7 height: 2 block 5: sig: 2 x: 285 y: 136 width: 17 height: 62 block 6: sig: 2 x: 83 y: 136 width: 34 height: 34 block 7: sig: 2 x: 175 y: 138 width: 17 height: 26 block 8: sig: 2 x: 175 y: 110 width: 9 height: 12 Detected 10: block 0: sig: 1 x: 250 y: 135 width: 18 height: 64 block 1: sig: 1 x: 44 y: 136 width: 19 height: 19 block 2: sig: 1 x: 117 y: 121 width: 8 height: 10 block 3: sig: 1 x: 210 y: 120 width: 5 height: 2 block 4: sig: 1 x: 211 y: 126 width: 8 height: 2 block 5: sig: 1 x: 176 y: 118 width: 6 height: 2 block 6: sig: 2 x: 285 y: 136 width: 17 height: 62 block 7: sig: 2 x: 82 y: 136 width: 35 height: 34 block 8: sig: 2 x: 175 y: 138 width: 14 height: 26 block 9: sig: 2 x: 175 y: 110 width: 9 height: 11
70 LTU-ARISE mm lens at 4 meter distance, light is 1 m from objects Figure 35a Figure 35b
71 LTU-ARISE Figure 35c Detected 9: block 0: sig: 1 x: 261 y: 137 width: 18 height: 63 block 1: sig: 1 x: 53 y: 140 width: 24 height: 21 block 2: sig: 1 x: 127 y: 123 width: 7 height: 11 block 3: sig: 1 x: 186 y: 121 width: 5 height: 2 block 4: sig: 1 x: 222 y: 123 width: 7 height: 2 block 5: sig: 2 x: 93 y: 138 width: 37 height: 33 block 6: sig: 2 x: 296 y: 138 width: 17 height: 63 block 7: sig: 2 x: 185 y: 144 width: 17 height: 35 block 8: sig: 2 x: 185 y: 114 width: 7 height: 10 Detected 9: block 0: sig: 1 x: 260 y: 138 width: 19 height: 64 block 1: sig: 1 x: 53 y: 140 width: 25 height: 22 block 2: sig: 1 x: 128 y: 123 width: 9 height: 11 block 3: sig: 1 x: 187 y: 121 width: 6 height: 2 block 4: sig: 1 x: 157 y: 122 width: 7 height: 2 block 5: sig: 2 x: 296 y: 138 width: 17 height: 63 block 6: sig: 2 x: 93 y: 138 width: 34 height: 33 block 7: sig: 2 x: 187 y: 143 width: 14 height: 33 block 8: sig: 2 x: 186 y: 112 width: 8 height: 14
72 LTU-ARISE mm lens at 4 meter distance, light is 1.5 m from objects Figure 36a Figure 36b
73 LTU-ARISE Figure 36c Detected 10: block 0: sig: 1 x: 261 y: 137 width: 18 height: 64 block 1: sig: 1 x: 51 y: 140 width: 27 height: 23 block 2: sig: 1 x: 126 y: 123 width: 7 height: 10 block 3: sig: 1 x: 221 y: 125 width: 7 height: 8 block 4: sig: 1 x: 186 y: 120 width: 6 height: 2 block 5: sig: 2 x: 296 y: 138 width: 17 height: 62 block 6: sig: 2 x: 92 y: 138 width: 35 height: 34 block 7: sig: 2 x: 185 y: 111 width: 7 height: 13 block 8: sig: 2 x: 183 y: 150 width: 12 height: 14 block 9: sig: 2 x: 185 y: 129 width: 8 height: 4 Detected 9: block 0: sig: 1 x: 261 y: 137 width: 18 height: 64 block 1: sig: 1 x: 52 y: 140 width: 26 height: 22 block 2: sig: 1 x: 127 y: 122 width: 8 height: 11 block 3: sig: 1 x: 186 y: 120 width: 7 height: 2 block 4: sig: 2 x: 91 y: 138 width: 35 height: 34 block 5: sig: 2 x: 296 y: 137 width: 16 height: 62 block 6: sig: 2 x: 184 y: 111 width: 7 height: 13 block 7: sig: 2 x: 186 y: 145 width: 5 height: 17 block 8: sig: 2 x: 185 y: 128 width: 8 height: 4
74 LTU-ARISE mm lens at 4 meter distance, light is 0.5 m from objects. WRO Bowling Round 1 Setup Figure 37a Figure 37b
75 LTU-ARISE Figure 37c Detected 6: block 0: sig: 1 x: 144 y: 125 width: 10 height: 5 block 1: sig: 1 x: 228 y: 122 width: 6 height: 2 block 2: sig: 1 x: 254 y: 126 width: 5 height: 8 block 3: sig: 1 x: 95 y: 120 width: 5 height: 2 block 4: sig: 1 x: 171 y: 121 width: 9 height: 2 block 5: sig: 1 x: 199 y: 122 width: 5 height: 3 Detected 4: block 0: sig: 1 x: 145 y: 125 width: 10 height: 8 block 1: sig: 1 x: 228 y: 122 width: 6 height: 2 block 2: sig: 1 x: 255 y: 129 width: 8 height: 2 block 3: sig: 1 x: 95 y: 120 width: 5 height: 2 Detected 4: block 0: sig: 1 x: 254 y: 123 width: 5 height: 2 block 1: sig: 1 x: 228 y: 122 width: 5 height: 2 block 2: sig: 1 x: 144 y: 127 width: 10 height: 2 block 3: sig: 1 x: 199 y: 122 width: 5 height: 2 Detected 6: block 0: sig: 1 x: 144 y: 124 width: 11 height: 8 block 1: sig: 1 x: 254 y: 123 width: 5 height: 2 block 2: sig: 1 x: 228 y: 122 width: 6 height: 2 block 3: sig: 1 x: 255 y: 129 width: 9 height: 2 block 4: sig: 1 x: 200 y: 122 width: 6 height: 2 block 5: sig: 1 x: 95 y: 120 width: 5 height: 2
76 LTU-ARISE mm lens at 4 meter distance, light is 0.1 m from objects. WRO Bowling Round 1 Setup Figure 38a Figure 38b
77 LTU-ARISE Figure 38c Detected 4: block 0: sig: 1 x: 266 y: 126 width: 7 height: 10 block 1: sig: 1 x: 166 y: 122 width: 11 height: 2 block 2: sig: 1 x: 86 y: 127 width: 6 height: 2 block 3: sig: 1 x: 107 y: 122 width: 7 height: 2 Detected 3: block 0: sig: 1 x: 266 y: 126 width: 7 height: 10 block 1: sig: 1 x: 139 y: 123 width: 13 height: 2 block 2: sig: 1 x: 86 y: 127 width: 6 height: 2 Detected 6: block 0: sig: 1 x: 266 y: 126 width: 9 height: 10 block 1: sig: 1 x: 139 y: 128 width: 14 height: 3 block 2: sig: 1 x: 166 y: 125 width: 11 height: 9 block 3: sig: 1 x: 86 y: 127 width: 7 height: 2 block 4: sig: 1 x: 201 y: 130 width: 10 height: 2 block 5: sig: 1 x: 106 y: 121 width: 5 height: 2 Detected 3: block 0: sig: 1 x: 266 y: 126 width: 6 height: 10 block 1: sig: 1 x: 107 y: 122 width: 7 height: 2 block 2: sig: 1 x: 143 y: 128 width: 3 height: 2
78 LTU-ARISE mm lens at 4 meter distance, light is 0.6 m from objects. WRO Bowling Round 1 Setup Figure 39a Figure 39b
79 LTU-ARISE Figure 39c Detected 6: block 0: sig: 1 x: 266 y: 125 width: 9 height: 10 block 1: sig: 1 x: 138 y: 121 width: 15 height: 3 block 2: sig: 1 x: 166 y: 121 width: 10 height: 2 block 3: sig: 1 x: 107 y: 120 width: 8 height: 3 block 4: sig: 1 x: 198 y: 125 width: 5 height: 9 block 5: sig: 1 x: 232 y: 128 width: 3 height: 2 Detected 6: block 0: sig: 1 x: 266 y: 125 width: 6 height: 10 block 1: sig: 1 x: 139 y: 121 width: 15 height: 2 block 2: sig: 1 x: 199 y: 122 width: 7 height: 2 block 3: sig: 1 x: 165 y: 121 width: 9 height: 2 block 4: sig: 1 x: 233 y: 128 width: 5 height: 2 block 5: sig: 1 x: 86 y: 126 width: 7 height: 2 Detected 7: block 0: sig: 1 x: 266 y: 125 width: 6 height: 10 block 1: sig: 1 x: 140 y: 124 width: 14 height: 8 block 2: sig: 1 x: 199 y: 122 width: 7 height: 2 block 3: sig: 1 x: 165 y: 121 width: 5 height: 2 block 4: sig: 1 x: 200 y: 129 width: 10 height: 2 block 5: sig: 1 x: 166 y: 128 width: 10 height: 2 block 6: sig: 1 x: 234 y: 128 width: 7 height: 2
80 LTU-ARISE mm lens at 4 meter distance, light is 1.1 m from objects. WRO Bowling Round 1 Setup Figure 40a Figure 40b
81 LTU-ARISE Figure 40c Detected 6: block 0: sig: 1 x: 266 y: 125 width: 7 height: 11 block 1: sig: 1 x: 166 y: 123 width: 9 height: 2 block 2: sig: 1 x: 235 y: 129 width: 8 height: 2 block 3: sig: 1 x: 139 y: 122 width: 15 height: 2 block 4: sig: 1 x: 198 y: 129 width: 5 height: 3 block 5: sig: 1 x: 109 y: 121 width: 6 height: 2 Detected 5: block 0: sig: 1 x: 266 y: 125 width: 7 height: 11 block 1: sig: 1 x: 139 y: 122 width: 14 height: 2 block 2: sig: 1 x: 235 y: 123 width: 5 height: 2 block 3: sig: 1 x: 198 y: 129 width: 5 height: 3 block 4: sig: 1 x: 235 y: 129 width: 8 height: 2 Detected 5: block 0: sig: 1 x: 266 y: 125 width: 7 height: 11 block 1: sig: 1 x: 139 y: 122 width: 15 height: 2 block 2: sig: 1 x: 235 y: 126 width: 8 height: 8 block 3: sig: 1 x: 199 y: 129 width: 7 height: 2 block 4: sig: 1 x: 86 y: 121 width: 6 height: 2
82 LTU-ARISE mm Lens at 4 meter distance, light is 0.1 m from pins. WRO Bowling Round 2 Setup Figure 41a Figure 41b
83 LTU-ARISE Figure 41c Detected 6: block 0: sig: 1 x: 114 y: 129 width: 12 height: 10 block 1: sig: 1 x: 206 y: 128 width: 7 height: 3 block 2: sig: 1 x: 60 y: 133 width: 9 height: 2 block 3: sig: 1 x: 248 y: 135 width: 9 height: 2 block 4: sig: 2 x: 157 y: 140 width: 19 height: 24 block 5: sig: 2 x: 158 y: 112 width: 10 height: 7 Detected 7: block 0: sig: 1 x: 113 y: 130 width: 12 height: 11 block 1: sig: 1 x: 61 y: 133 width: 10 height: 3 block 2: sig: 1 x: 206 y: 129 width: 7 height: 2 block 3: sig: 1 x: 249 y: 135 width: 9 height: 2 block 4: sig: 2 x: 158 y: 142 width: 20 height: 19 block 5: sig: 2 x: 158 y: 112 width: 10 height: 6 block 6: sig: 2 x: 149 y: 163 width: 3 height: 3 Detected 6: block 0: sig: 1 x: 114 y: 130 width: 10 height: 12 block 1: sig: 1 x: 61 y: 133 width: 10 height: 2 block 2: sig: 1 x: 206 y: 129 width: 7 height: 2 block 3: sig: 1 x: 247 y: 135 width: 6 height: 2 block 4: sig: 2 x: 158 y: 145 width: 21 height: 25 block 5: sig: 2 x: 158 y: 114 width: 10 height: 11
84 LTU-ARISE mm Lens at 4 meter distance, light is 0.6 m from pins. WRO Bowling Round 2 Setup Figure 42a Figure 42b
85 LTU-ARISE Detected 5: block 0: sig: 1 x: 115 y: 129 width: 13 height: 9 block 1: sig: 1 x: 207 y: 128 width: 7 height: 2 block 2: sig: 1 x: 62 y: 134 width: 9 height: 2 block 3: sig: 2 x: 160 y: 157 width: 20 height: 42 block 4: sig: 2 x: 160 y: 117 width: 10 height: 16 Detected 4: block 0: sig: 1 x: 115 y: 129 width: 13 height: 9 block 1: sig: 1 x: 161 y: 127 width: 9 height: 2 block 2: sig: 2 x: 159 y: 157 width: 21 height: 42 block 3: sig: 2 x: 160 y: 117 width: 10 height: 16 Detected 6: block 0: sig: 1 x: 115 y: 129 width: 13 height: 9 block 1: sig: 1 x: 207 y: 128 width: 7 height: 2 block 2: sig: 1 x: 250 y: 135 width: 6 height: 2 block 3: sig: 1 x: 66 y: 133 width: 4 height: 2 block 4: sig: 2 x: 159 y: 156 width: 21 height: 44 block 5: sig: 2 x: 160 y: 117 width: 9 height: 15 Figure 42c
86 LTU-ARISE mm Lens at 4 meter distance, light is 1.1 m from pins. WRO Bowling Round 2 Setup Figure 43a Figure 43b
87 LTU-ARISE Detected 5: block 0: sig: 1 x: 118 y: 131 width: 13 height: 10 block 1: sig: 1 x: 253 y: 129 width: 6 height: 3 block 2: sig: 1 x: 211 y: 135 width: 6 height: 2 block 3: sig: 2 x: 163 y: 143 width: 20 height: 66 block 4: sig: 2 x: 197 y: 103 width: 3 height: 2 Detected 3: block 0: sig: 1 x: 120 y: 130 width: 10 height: 11 block 1: sig: 1 x: 252 y: 129 width: 7 height: 2 block 2: sig: 2 x: 162 y: 146 width: 21 height: 64 Detected 4: block 0: sig: 1 x: 119 y: 130 width: 12 height: 11 block 1: sig: 1 x: 252 y: 129 width: 5 height: 3 block 2: sig: 1 x: 211 y: 135 width: 9 height: 3 block 3: sig: 2 x: 163 y: 144 width: 20 height: 67 Figure 43c
88 LTU-ARISE mm Lens at 4 meter distance, light is 2.6 m from pins. WRO Bowling Round 2 Setup (Extreme Case) Figure 44a Figure 44b
89 LTU-ARISE Detected 6: block 0: sig: 1 x: 119 y: 130 width: 12 height: 10 block 1: sig: 1 x: 164 y: 127 width: 6 height: 2 block 2: sig: 1 x: 210 y: 135 width: 6 height: 2 block 3: sig: 1 x: 252 y: 136 width: 5 height: 2 block 4: sig: 2 x: 163 y: 156 width: 20 height: 44 block 5: sig: 2 x: 163 y: 117 width: 11 height: 16 Detected 5: block 0: sig: 1 x: 119 y: 130 width: 12 height: 10 block 1: sig: 1 x: 253 y: 136 width: 7 height: 2 block 2: sig: 1 x: 211 y: 135 width: 8 height: 2 block 3: sig: 1 x: 65 y: 127 width: 5 height: 2 block 4: sig: 2 x: 163 y: 144 width: 20 height: 67 Detected 6: block 0: sig: 1 x: 119 y: 130 width: 12 height: 11 block 1: sig: 1 x: 166 y: 127 width: 8 height: 3 block 2: sig: 1 x: 210 y: 135 width: 7 height: 2 block 3: sig: 1 x: 64 y: 127 width: 5 height: 2 block 4: sig: 2 x: 163 y: 156 width: 20 height: 44 block 5: sig: 2 x: 163 y: 118 width: 11 height: 14 Figure 44c
90 LTU-ARISE mm lens at 4 m away, light is 0.1 m from pins. WRO Bowling Round 2 Setup Figure 45a Figure 45b
91 LTU-ARISE Detected 1: block 0: sig: 2 x: 158 y: 120 width: 3 height: 15 Detected 1: block 0: sig: 2 x: 158 y: 120 width: 3 height: 15 Detected 1: block 0: sig: 2 x: 158 y: 121 width: 3 height: 16 Detected 1: block 0: sig: 2 x: 158 y: 120 width: 3 height: 15 Detected 1: block 0: sig: 2 x: 158 y: 121 width: 3 height: 16 Figure 45c
92 LTU-ARISE mm lens at 4 m away, light is 0.6 m from pins. WRO Bowling Round 2 Setup Figure 46a Figure 46b
93 LTU-ARISE Figure 46c Detected 1: block 0: sig: 2 x: 162 y: 124 width: 4 height: 9 Detected 1: block 0: sig: 2 x: 161 y: 124 width: 3 height: 6 Detected 2: block 0: sig: 1 x: 53 y: 87 width: 2 height: 2 block 1: sig: 2 x: 160 y: 124 width: 3 height: 9 Detected 2: block 0: sig: 1 x: 53 y: 87 width: 2 height: 2 block 1: sig: 2 x: 161 y: 125 width: 4 height: 7
94 LTU-ARISE mm lens at 4 m away, light is 1.1 m from pins. WRO Bowling Round 2 Setup Figure 47a Figure 47b
95 LTU-ARISE Detected 5: block 0: sig: 1 x: 19 y: 83 width: 2 height: 4 block 1: sig: 1 x: 15 y: 119 width: 2 height: 2 block 2: sig: 1 x: 14 y: 129 width: 2 height: 2 block 3: sig: 1 x: 21 y: 71 width: 2 height: 2 block 4: sig: 2 x: 161 y: 121 width: 5 height: 15 Detected 2: block 0: sig: 2 x: 162 y: 121 width: 4 height: 16 block 1: sig: 2 x: 20 y: 114 width: 2 height: 2 Detected 3: block 0: sig: 1 x: 18 y: 88 width: 2 height: 10 block 1: sig: 1 x: 15 y: 118 width: 2 height: 2 block 2: sig: 2 x: 161 y: 121 width: 3 height: 16 Detected 3: block 0: sig: 1 x: 315 y: 123 width: 9 height: 25 block 1: sig: 1 x: 16 y: 104 width: 2 height: 11 block 2: sig: 2 x: 161 y: 121 width: 3 height: 16 Figure 47c
96 LTU-ARISE mm lens at 4 m away, light is 1.1 m from pins. WRO Bowling Round 2 Setup Figure 48a Figure 48b
97 LTU-ARISE Figure 48c Detected 1: block 0: sig: 2 x: 162 y: 125 width: 4 height: 3 Detected 1: block 0: sig: 2 x: 161 y: 127 width: 3 height: 3 Detected 1: block 0: sig: 2 x: 161 y: 124 width: 2 height: 2 Detected 1: block 0: sig: 2 x: 161 y: 126 width: 3 height: 7 Detected 1: block 0: sig: 2 x: 161 y: 125 width: 2 height: 3 Detected 1: block 0: sig: 2 x: 163 y: 115 width: 2 height: 2 Detected 1: block 0: sig: 2 x: 162 y: 125 width: 4 height: 5 Detected 1: block 0: sig: 2 x: 163 y: 126 width: 4 height: 6 Detected 1: block 0: sig: 2 x: 163 y: 122 width: 4 height: 2 Detected 1: block 0: sig: 2 x: 161 y: 127 width: 3 height: 4 Detected 1: block 0: sig: 2 x: 161 y: 122 width: 3 height: 3 Detected 1:
98 LTU-ARISE Observations on Pixy detection of pins with varied lighting conditions: 1. Under the experimental conditions, the different lighting conditions had little to no effect on the 25 mm lens' ability to detect small features 2. The 6.1 mm lens has trouble detecting the objects due to the different lighting conditions - it sees nothing but the green pin
99 LTU-ARISE Conclusion From the experiments conducted, the following conclusions can be drawn: 1. The size of each object is the dominant factor in determining how easily it is detected by each lens on the Pixy CMUcam5. 2. The focal length of each lens has a significant effect on object detection. 3. Small lenses can detect small features only up to a very limited distance, while the larger lenses can detect small features at long ranges (up to 4 meters in this study). 4. Within the testing conditions in this study, to the larger lenses, it seems that varied lighting has little to no effect on their ability to detect small features. 5. For the pins used in the WRO challenge, the small red stripes can be detected with appropriate range control by the larger lenses, and the green pins can be easily seen 6. The environment should be carefully controlled to prevent the Pixy cam from picking up outside noise and interference References:
MANUAL FOR RX700 LR and NR
 MANUAL FOR RX700 LR and NR 2013, November 11 Revision/ updates Date, updates, and person Revision 1.2 03-12-2013, By Patrick M Affected pages, ETC ALL Content Revision/ updates... 1 Preface... 2 Technical
MANUAL FOR RX700 LR and NR 2013, November 11 Revision/ updates Date, updates, and person Revision 1.2 03-12-2013, By Patrick M Affected pages, ETC ALL Content Revision/ updates... 1 Preface... 2 Technical
SE05: Getting Started with Cognex DataMan Bar Code Readers - Hands On Lab Werner Solution Expo April 8 & 9
 SE05: Getting Started with Cognex DataMan Bar Code Readers - Hands On Lab Werner Solution Expo April 8 & 9 Learning Goals: At the end of this lab, the student should have basic familiarity with the DataMan
SE05: Getting Started with Cognex DataMan Bar Code Readers - Hands On Lab Werner Solution Expo April 8 & 9 Learning Goals: At the end of this lab, the student should have basic familiarity with the DataMan
idex Manual Contact details Producer: FOCI BV. The Netherlands www.foci.nl [email protected]
 idex USB Manual Contact details Producer: FOCI BV. The Netherlands www.foci.nl [email protected] 2 Index Index... 3 1. General... 4 2. Get started!... 5 3. First use... 7 4. FOCI idex Software... 14 5. Operating
idex USB Manual Contact details Producer: FOCI BV. The Netherlands www.foci.nl [email protected] 2 Index Index... 3 1. General... 4 2. Get started!... 5 3. First use... 7 4. FOCI idex Software... 14 5. Operating
Controlling a Dot Matrix LED Display with a Microcontroller
 Controlling a Dot Matrix LED Display with a Microcontroller By Matt Stabile and programming will be explained in general terms as well to allow for adaptation to any comparable microcontroller or LED matrix.
Controlling a Dot Matrix LED Display with a Microcontroller By Matt Stabile and programming will be explained in general terms as well to allow for adaptation to any comparable microcontroller or LED matrix.
MRC High Resolution. MR-compatible digital HD video camera. User manual
 MRC High Resolution MR-compatible digital HD video camera User manual page 1 of 12 Contents 1. Intended use...2 2. System components...3 3. Video camera and lens...4 4. Interface...4 5. Installation...5
MRC High Resolution MR-compatible digital HD video camera User manual page 1 of 12 Contents 1. Intended use...2 2. System components...3 3. Video camera and lens...4 4. Interface...4 5. Installation...5
UniPi technical documentation REV 1.1
 technical documentation REV 1.1 Contents Overview... 2 Description... 3 GPIO port map... 4 Power Requirements... 5 Connecting Raspberry Pi to UniPi... 5 Building blocks... 5 Relays... 5 Digital Inputs...
technical documentation REV 1.1 Contents Overview... 2 Description... 3 GPIO port map... 4 Power Requirements... 5 Connecting Raspberry Pi to UniPi... 5 Building blocks... 5 Relays... 5 Digital Inputs...
Data Sheet. Adaptive Design ltd. Arduino Dual L6470 Stepper Motor Shield V1.0. 20 th November 2012. L6470 Stepper Motor Shield
 Arduino Dual L6470 Stepper Motor Shield Data Sheet Adaptive Design ltd V1.0 20 th November 2012 Adaptive Design ltd. Page 1 General Description The Arduino stepper motor shield is based on L6470 microstepping
Arduino Dual L6470 Stepper Motor Shield Data Sheet Adaptive Design ltd V1.0 20 th November 2012 Adaptive Design ltd. Page 1 General Description The Arduino stepper motor shield is based on L6470 microstepping
LEGO NXT-based Robotic Arm
 Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University [email protected], [email protected], [email protected]
Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University [email protected], [email protected], [email protected]
Yun Shield User Manual VERSION: 1.0. Yun Shield User Manual 1 / 22. www.dragino.com
 Yun Shield User Manual VERSION: 1.0 Version Description Date 0.1 Initiate 2014-Jun-21 1.0 Release 2014-Jul-08 Yun Shield User Manual 1 / 22 Index: 1 Introduction... 3 1.1 What is Yun Shield... 3 1.2 Specifications...
Yun Shield User Manual VERSION: 1.0 Version Description Date 0.1 Initiate 2014-Jun-21 1.0 Release 2014-Jul-08 Yun Shield User Manual 1 / 22 Index: 1 Introduction... 3 1.1 What is Yun Shield... 3 1.2 Specifications...
Camera Sensor Driver Development And Integration
 Camera Sensor Driver Development And Integration Introduction Camera enables multimedia on phones. It is going to be an important human machine interface, adding to augmented reality possibilities on embedded
Camera Sensor Driver Development And Integration Introduction Camera enables multimedia on phones. It is going to be an important human machine interface, adding to augmented reality possibilities on embedded
Hand Gestures Remote Controlled Robotic Arm
 Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 601-606 Research India Publications http://www.ripublication.com/aeee.htm Hand Gestures Remote Controlled
Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 601-606 Research India Publications http://www.ripublication.com/aeee.htm Hand Gestures Remote Controlled
FLYPORT Wi-Fi 802.11G
 FLYPORT Wi-Fi 802.11G System on module 802.11g WIFI - Infrastructure mode - softap mode - Ad hoc mode Microchip PIC 24F 16 bit processor Microchip MRF24WG0MA/MB - Native WiFi 802.11g transceiver - PCB
FLYPORT Wi-Fi 802.11G System on module 802.11g WIFI - Infrastructure mode - softap mode - Ad hoc mode Microchip PIC 24F 16 bit processor Microchip MRF24WG0MA/MB - Native WiFi 802.11g transceiver - PCB
Lab Experiment 1: The LPC 2148 Education Board
 Lab Experiment 1: The LPC 2148 Education Board 1 Introduction The aim of this course ECE 425L is to help you understand and utilize the functionalities of ARM7TDMI LPC2148 microcontroller. To do that,
Lab Experiment 1: The LPC 2148 Education Board 1 Introduction The aim of this course ECE 425L is to help you understand and utilize the functionalities of ARM7TDMI LPC2148 microcontroller. To do that,
PN532 NFC RFID Module User Guide
 PN532 NFC RFID Module User Guide Version 3 Introduction NFC is a popular technology in recent years. We often heard this word while smart phone company such as Samsung or HTC introduces their latest high-end
PN532 NFC RFID Module User Guide Version 3 Introduction NFC is a popular technology in recent years. We often heard this word while smart phone company such as Samsung or HTC introduces their latest high-end
APPLICATION NOTE. Basler racer Migration Guide. Mechanics. www.baslerweb.com. Flexible Mount Concept. Housing
 62 62 APPLICATION NOTE www.baslerweb.com Basler racer Migration Guide This paper describes what to consider when replacing the Basler L100 Camera Link or the Basler runner Gigabit Ethernet (GigE) line
62 62 APPLICATION NOTE www.baslerweb.com Basler racer Migration Guide This paper describes what to consider when replacing the Basler L100 Camera Link or the Basler runner Gigabit Ethernet (GigE) line
Android Application Development and Bluetooth Technology
 Android Application Development and Bluetooth Technology James Cracchiolo 3/28/14 Table of Contents Introduction page 3 Objective page 3 What is Bluetooth? page 3 What is Android? page 4 Materials Needed
Android Application Development and Bluetooth Technology James Cracchiolo 3/28/14 Table of Contents Introduction page 3 Objective page 3 What is Bluetooth? page 3 What is Android? page 4 Materials Needed
Active noise control in practice: transformer station
 Active noise control in practice: transformer station Edwin Buikema 1 ; Fokke D. van der Ploeg 2 ; Jan H. Granneman 3 1, 2, 3 Peutz bv, Netherlands ABSTRACT Based on literature and extensive measurements
Active noise control in practice: transformer station Edwin Buikema 1 ; Fokke D. van der Ploeg 2 ; Jan H. Granneman 3 1, 2, 3 Peutz bv, Netherlands ABSTRACT Based on literature and extensive measurements
Programmable Terminal. NPSeries. Easy Setup with the Low-cost, Compact NP Series
 Programmable Terminal NPSeries Easy Setup with the Low-cost, Compact NP Series Simpler and More Versatile.OMRON s Compact NP Series Connect! Easier connection to OMRON PLCs and Temperature Controllers,
Programmable Terminal NPSeries Easy Setup with the Low-cost, Compact NP Series Simpler and More Versatile.OMRON s Compact NP Series Connect! Easier connection to OMRON PLCs and Temperature Controllers,
SNC-VL10P Video Network Camera
 SNC-VL10P Video Network Camera CHANGING THE WAY BUSINESS 2AM. WATCHING HIS NEW PRODUCTION LINE. 10,000 MILES AWAY. COMMUNICATES www.sonybiz.net/netstation CORPORATE COMMUNICATIONS SURVEILLANCE VIDEOCONFERENCING
SNC-VL10P Video Network Camera CHANGING THE WAY BUSINESS 2AM. WATCHING HIS NEW PRODUCTION LINE. 10,000 MILES AWAY. COMMUNICATES www.sonybiz.net/netstation CORPORATE COMMUNICATIONS SURVEILLANCE VIDEOCONFERENCING
INTERACTIVE WHITE BOARD MANUAL
 INTERACTIVE WHITE BOARD MANUAL Thank you for your purchase of a Bi-Bright Interactive Whiteboard. Visite us at www.bibright.com Bi-Bright Comunicação Visual Interactiva S.A. Bi-Bright S.A. Rua Cais da
INTERACTIVE WHITE BOARD MANUAL Thank you for your purchase of a Bi-Bright Interactive Whiteboard. Visite us at www.bibright.com Bi-Bright Comunicação Visual Interactiva S.A. Bi-Bright S.A. Rua Cais da
A+ Guide to Managing and Maintaining Your PC, 7e. Chapter 1 Introducing Hardware
 A+ Guide to Managing and Maintaining Your PC, 7e Chapter 1 Introducing Hardware Objectives Learn that a computer requires both hardware and software to work Learn about the many different hardware components
A+ Guide to Managing and Maintaining Your PC, 7e Chapter 1 Introducing Hardware Objectives Learn that a computer requires both hardware and software to work Learn about the many different hardware components
USB I/O CONTROL BOX 8 relays, 8 digital I/O lines and 8 HV inputs
 USB I/O CONTROL BOX 8 relays, 8 digital I/O lines and 8 HV inputs The Big Deal USB HID device compatible with 32/64 Bit operating systems 8 TTL/LVTTL digital I/O channels, 8 High Voltage digital inputs
USB I/O CONTROL BOX 8 relays, 8 digital I/O lines and 8 HV inputs The Big Deal USB HID device compatible with 32/64 Bit operating systems 8 TTL/LVTTL digital I/O channels, 8 High Voltage digital inputs
PRELIMINARY DESIGN REVIEW
 STUDENTS SPACE ASSOCIATION THE FACULTY OF POWER AND AERONAUTICAL ENGINEERING WARSAW UNIVERSITY OF TECHNOLOGY PRELIMINARY DESIGN REVIEW CAMERAS August 2015 Abstract The following document is a part of the
STUDENTS SPACE ASSOCIATION THE FACULTY OF POWER AND AERONAUTICAL ENGINEERING WARSAW UNIVERSITY OF TECHNOLOGY PRELIMINARY DESIGN REVIEW CAMERAS August 2015 Abstract The following document is a part of the
Wireless Security Camera
 Wireless Security Camera Technical Manual 12/14/2001 Table of Contents Page 1.Overview 3 2. Camera Side 4 1.Camera 5 2. Motion Sensor 5 3. PIC 5 4. Transmitter 5 5. Power 6 3. Computer Side 7 1.Receiver
Wireless Security Camera Technical Manual 12/14/2001 Table of Contents Page 1.Overview 3 2. Camera Side 4 1.Camera 5 2. Motion Sensor 5 3. PIC 5 4. Transmitter 5 5. Power 6 3. Computer Side 7 1.Receiver
CMOS OV7660 Camera Module 1/5-Inch 0.3-Megapixel Module Datasheet
 CMOS OV7660 Camera Module 1/5-Inch 0.3-Megapixel Module Datasheet Rev 1.0, June 2013 Table of Contents 1 Introduction...2 2 Features...3 3 Key Specifications...4 4 Application...4 5 Pin Definition...6
CMOS OV7660 Camera Module 1/5-Inch 0.3-Megapixel Module Datasheet Rev 1.0, June 2013 Table of Contents 1 Introduction...2 2 Features...3 3 Key Specifications...4 4 Application...4 5 Pin Definition...6
MONITOR MOUNTS. Monitor Arms OVERVIEW. Space saving benefits. Collaboration benefits. Performance benefits
 Monitor Arms OVERVIEW MONITOR MOUNTS Monitor arms can be used with either fixed height or adjustable height workcenters and are an excellent way to achieve the optimal level of adjustability recommended
Monitor Arms OVERVIEW MONITOR MOUNTS Monitor arms can be used with either fixed height or adjustable height workcenters and are an excellent way to achieve the optimal level of adjustability recommended
Basler dart AREA SCAN CAMERAS. Board level cameras with bare board, S- and CS-mount options
 Basler dart AREA SCAN CAMERAS Board level cameras with bare board, S- and CS-mount options Designed to meet smallest space as well as lowest weight and power requirements Plug and play with future-proof
Basler dart AREA SCAN CAMERAS Board level cameras with bare board, S- and CS-mount options Designed to meet smallest space as well as lowest weight and power requirements Plug and play with future-proof
Programming with the Arduino: open-source hardware in an introductory programming laboratory. Paul Cruickshank [email protected].
 Programming with the Arduino: open-source hardware in an introductory programming laboratory Paul Cruickshank [email protected] Motivation Prior to 2013, no formal programming for St Andrews physics
Programming with the Arduino: open-source hardware in an introductory programming laboratory Paul Cruickshank [email protected] Motivation Prior to 2013, no formal programming for St Andrews physics
K-Type Thermocouple Sensor User s Guide
 K-Type Thermocouple Sensor User s Guide 1 TABLE OF CONTENTS: 1 INTRODUCTION... 2 2 TYPICAL APPLICATION:... 2 3 INSTALLATION RULES:... 2 3.1 Connecting the sensor to M1/MD4 data logger:... 2 3.2 Connecting
K-Type Thermocouple Sensor User s Guide 1 TABLE OF CONTENTS: 1 INTRODUCTION... 2 2 TYPICAL APPLICATION:... 2 3 INSTALLATION RULES:... 2 3.1 Connecting the sensor to M1/MD4 data logger:... 2 3.2 Connecting
Raspberry Pi. Hans- Petter Halvorsen, M.Sc.
 Raspberry Pi Hans- Petter Halvorsen, M.Sc. Raspberry Pi 2 https://www.raspberrypi.org https://dev.windows.com/iot Hans- Petter Halvorsen, M.Sc. Raspberry Pi 2 - Overview The Raspberry Pi 2 is a low cost,
Raspberry Pi Hans- Petter Halvorsen, M.Sc. Raspberry Pi 2 https://www.raspberrypi.org https://dev.windows.com/iot Hans- Petter Halvorsen, M.Sc. Raspberry Pi 2 - Overview The Raspberry Pi 2 is a low cost,
Overview. Proven Image Quality and Easy to Use Without a Frame Grabber. Your benefits include:
 Basler runner Line Scan Cameras High-quality line scan technology meets a cost-effective GigE interface Real color support in a compact housing size Shading correction compensates for difficult lighting
Basler runner Line Scan Cameras High-quality line scan technology meets a cost-effective GigE interface Real color support in a compact housing size Shading correction compensates for difficult lighting
Next Gen Platform: Team & Mentor Guide
 Next Gen Platform: Team & Mentor Guide 1 Introduction For the 2015-2016 season, the FIRST Tech Challenge (FTC) will be adopting a new controller for its robot competitions. The new platform, which will
Next Gen Platform: Team & Mentor Guide 1 Introduction For the 2015-2016 season, the FIRST Tech Challenge (FTC) will be adopting a new controller for its robot competitions. The new platform, which will
VE02AL / VE05AL / VE02ALR VGA & Stereo Audio CAT5 Extender with Chainable Output
 VE02AL / VE05AL / VE02ALR VGA & Stereo Audio CAT5 Extender with Chainable Output Introduction: VE02AL, VE05AL is designed for VGA +Stereo Audio signal over cost effective CAT5 cable to instead of VGA and
VE02AL / VE05AL / VE02ALR VGA & Stereo Audio CAT5 Extender with Chainable Output Introduction: VE02AL, VE05AL is designed for VGA +Stereo Audio signal over cost effective CAT5 cable to instead of VGA and
Vibration Measurement of Wireless Sensor Nodes for Structural Health Monitoring
 , pp.18-22 http://dx.doi.org/10.14257/astl.2015.98.05 Vibration Measurement of Wireless Sensor Nodes for Structural Health Monitoring Surgwon Sohn, Seong-Rak Rim, In Jung Lee Div. of Computer and Information
, pp.18-22 http://dx.doi.org/10.14257/astl.2015.98.05 Vibration Measurement of Wireless Sensor Nodes for Structural Health Monitoring Surgwon Sohn, Seong-Rak Rim, In Jung Lee Div. of Computer and Information
PA500U/PA500X/PA550W/PA600X Installation Guide Desktop and Ceiling Mount Rev 1.6
 Contents Product Description, Lens Specs, Screen/Aspect Ratio Notes and Formulas Pg 1 Distance Charts and Formulas Pg 2-4 Ceiling Mount/Desktop Installation Pg 5 Lens Shift Adjustable Range Pg 6 Cabinet
Contents Product Description, Lens Specs, Screen/Aspect Ratio Notes and Formulas Pg 1 Distance Charts and Formulas Pg 2-4 Ceiling Mount/Desktop Installation Pg 5 Lens Shift Adjustable Range Pg 6 Cabinet
Software for Producing Rack Layouts and Purchase Orders
 1 Software for Producing Rack Layouts and Purchase Orders Welcome to RackTools: software that makes it simple and quick to specify Middle Atlantic Products. RackTools has been designed with one purpose
1 Software for Producing Rack Layouts and Purchase Orders Welcome to RackTools: software that makes it simple and quick to specify Middle Atlantic Products. RackTools has been designed with one purpose
What Smartphones and Tablets are supported by Smart Measure PRO?
 What Smartphones and Tablets are supported by Smart Measure PRO? The following Smartphones and Tablets have gone through camera calibration procedure and provide the highest level of accuracy for capturing
What Smartphones and Tablets are supported by Smart Measure PRO? The following Smartphones and Tablets have gone through camera calibration procedure and provide the highest level of accuracy for capturing
Welcome to the tutorial for the MPLAB Starter Kit for dspic DSCs
 Welcome to the tutorial for the MPLAB Starter Kit for dspic DSCs Welcome to this tutorial on Microchip s MPLAB Starter Kit for dspic Digital Signal Controllers, or DSCs. The starter kit is an all-in-one
Welcome to the tutorial for the MPLAB Starter Kit for dspic DSCs Welcome to this tutorial on Microchip s MPLAB Starter Kit for dspic Digital Signal Controllers, or DSCs. The starter kit is an all-in-one
Basler. Area Scan Cameras
 Basler Area Scan Cameras VGA to 5 megapixels and up to 210 fps Selected high quality Sony and Kodak CCD sensors Powerful Gigabit Ethernet interface Superb image quality at all resolutions and frame rates
Basler Area Scan Cameras VGA to 5 megapixels and up to 210 fps Selected high quality Sony and Kodak CCD sensors Powerful Gigabit Ethernet interface Superb image quality at all resolutions and frame rates
The Trade-off between Image Resolution and Field of View: the Influence of Lens Selection
 The Trade-off between Image Resolution and Field of View: the Influence of Lens Selection I want a lens that can cover the whole parking lot and I want to be able to read a license plate. Sound familiar?
The Trade-off between Image Resolution and Field of View: the Influence of Lens Selection I want a lens that can cover the whole parking lot and I want to be able to read a license plate. Sound familiar?
Green House Monitoring and Controlling Using Android Mobile Application
 Green House Monitoring and Controlling Using Android Mobile Application Aji Hanggoro [email protected] Mahesa Adhitya Putra [email protected] Rizki Reynaldo [email protected] Riri Fitri
Green House Monitoring and Controlling Using Android Mobile Application Aji Hanggoro [email protected] Mahesa Adhitya Putra [email protected] Rizki Reynaldo [email protected] Riri Fitri
Master Anamorphic T1.9/35 mm
 T1.9/35 mm backgrounds and a smooth, cinematic look, the 35 Close Focus (2) 0.75 m / 2 6 Magnification Ratio (3) H: 1:32.3, V: 1:16.1 Weight (kg) 2.6 Weight (lbs) 5.7 Entrance Pupil (7) (mm) -179 Entrance
T1.9/35 mm backgrounds and a smooth, cinematic look, the 35 Close Focus (2) 0.75 m / 2 6 Magnification Ratio (3) H: 1:32.3, V: 1:16.1 Weight (kg) 2.6 Weight (lbs) 5.7 Entrance Pupil (7) (mm) -179 Entrance
A Surveillance Robot with Climbing Capabilities for Home Security
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 2, Issue. 11, November 2013,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 2, Issue. 11, November 2013,
How To Use Bodescan For 3D Imaging Of The Human Body
 «Bodescan» THE ULTIMATE 3D SCANNER FOR DATA ACQUISITION OF HUMAN BODY A COMPREHENSIVE SYSTEM INCLUDING HARDWARE AND SOFTWARE TOOLS Page 2 of 9 Bodescan HUMAN BODY3D SCANNING HARDWARE AND SOFTWARE INCLUDED
«Bodescan» THE ULTIMATE 3D SCANNER FOR DATA ACQUISITION OF HUMAN BODY A COMPREHENSIVE SYSTEM INCLUDING HARDWARE AND SOFTWARE TOOLS Page 2 of 9 Bodescan HUMAN BODY3D SCANNING HARDWARE AND SOFTWARE INCLUDED
PDF Created with deskpdf PDF Writer - Trial :: http://www.docudesk.com
 CCTV Lens Calculator For a quick 1/3" CCD Camera you can work out the lens required using this simple method: Distance from object multiplied by 4.8, divided by horizontal or vertical area equals the lens
CCTV Lens Calculator For a quick 1/3" CCD Camera you can work out the lens required using this simple method: Distance from object multiplied by 4.8, divided by horizontal or vertical area equals the lens
1. Open the battery compartment as shown in the image.
 This Quick User Guide helps you get started with the IRIScan Book 3 scanner. This scanner is supplied with the software applications Readiris Pro 12, IRIScan Direct and IRISCompressor. Corresponding Quick
This Quick User Guide helps you get started with the IRIScan Book 3 scanner. This scanner is supplied with the software applications Readiris Pro 12, IRIScan Direct and IRISCompressor. Corresponding Quick
PS 29M DUAL CHANNEL BELTPACK IN METAL CASE
 PS 29M DUAL CHANNEL BELTPACK IN METAL CASE USER MANUAL October 2013 This product is designed and manufactured by: ASL Intercom BV Zonnebaan 42 3542 EG Utrecht The Netherlands Phone: +31 (0)30 2411901 Fax:
PS 29M DUAL CHANNEL BELTPACK IN METAL CASE USER MANUAL October 2013 This product is designed and manufactured by: ASL Intercom BV Zonnebaan 42 3542 EG Utrecht The Netherlands Phone: +31 (0)30 2411901 Fax:
Computer Automation Techniques. Arthur Carroll
 Computer Automation Techniques Arthur Carroll 1 Three Types of Computers Micro-Controller Single Board Computer Desktop Computer 2 The Micro-Controller Small inexpensive DIP or surface mount chips Roughly
Computer Automation Techniques Arthur Carroll 1 Three Types of Computers Micro-Controller Single Board Computer Desktop Computer 2 The Micro-Controller Small inexpensive DIP or surface mount chips Roughly
www.dragino.com Yun Shield Quick Start Guide VERSION: 1.0 Version Description Date 1.0 Release 2014-Jul-08 Yun Shield Quick Start Guide 1 / 14
 Yun Shield Quick Start Guide VERSION: 1.0 Version Description Date 1.0 Release 2014-Jul-08 Yun Shield Quick Start Guide 1 / 14 Index: 1 Introduction... 3 1.1 About this quick start guide... 3 1.2 What
Yun Shield Quick Start Guide VERSION: 1.0 Version Description Date 1.0 Release 2014-Jul-08 Yun Shield Quick Start Guide 1 / 14 Index: 1 Introduction... 3 1.1 About this quick start guide... 3 1.2 What
VoIP Audio Setup - PC Users
 VoIP Audio Setup - PC Users To select and test your Mic & Speakers settings 1. Right-click the icon in the PC system tray and select Preferences. 2. Select Audio. Microphone Setup - It is recommended that
VoIP Audio Setup - PC Users To select and test your Mic & Speakers settings 1. Right-click the icon in the PC system tray and select Preferences. 2. Select Audio. Microphone Setup - It is recommended that
Funky Forest. Setup Document. An interactive ecosystem
 Funky Forest An interactive ecosystem Setup Document Overview Equipment Space requirements Lighting requirements Setup time Setup diagrams Notes Contact Funky Forest - An interactive ecosystem Emily Gobeille,
Funky Forest An interactive ecosystem Setup Document Overview Equipment Space requirements Lighting requirements Setup time Setup diagrams Notes Contact Funky Forest - An interactive ecosystem Emily Gobeille,
Instruction Manual Service Program ULTRA-PROG-IR
 Instruction Manual Service Program ULTRA-PROG-IR Parameterizing Software for Ultrasonic Sensors with Infrared Interface Contents 1 Installation of the Software ULTRA-PROG-IR... 4 1.1 System Requirements...
Instruction Manual Service Program ULTRA-PROG-IR Parameterizing Software for Ultrasonic Sensors with Infrared Interface Contents 1 Installation of the Software ULTRA-PROG-IR... 4 1.1 System Requirements...
Pmod peripheral modules are powered by the host via the interface s power and ground pins.
 Digilent Pmod Interface Specification Revision: November 20, 2011 1300 NE Henley Court, Suite 3 Pullman, WA 99163 (509) 334 6306 Voice (509) 334 6300 Fax Introduction The Digilent Pmod interface is used
Digilent Pmod Interface Specification Revision: November 20, 2011 1300 NE Henley Court, Suite 3 Pullman, WA 99163 (509) 334 6306 Voice (509) 334 6300 Fax Introduction The Digilent Pmod interface is used
2/26/2008. Sensors For Robotics. What is sensing? Why do robots need sensors? What is the angle of my arm? internal information
 Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
MediaTek LinkIt Smart 7688 FAQ
 Version: 1.0 Release date: 1 st December 2015 Specifications are subject to change without notice. 2015 MediaTek Inc. Unauthorized reproduction of this information in whole or in part is strictly prohibited.
Version: 1.0 Release date: 1 st December 2015 Specifications are subject to change without notice. 2015 MediaTek Inc. Unauthorized reproduction of this information in whole or in part is strictly prohibited.
2.0 Command and Data Handling Subsystem
 2.0 Command and Data Handling Subsystem The Command and Data Handling Subsystem is the brain of the whole autonomous CubeSat. The C&DH system consists of an Onboard Computer, OBC, which controls the operation
2.0 Command and Data Handling Subsystem The Command and Data Handling Subsystem is the brain of the whole autonomous CubeSat. The C&DH system consists of an Onboard Computer, OBC, which controls the operation
RL HW / RL HW+ / RL HGW / RL HV / RL HVPW/RL HVPW-G
 Auto-Levelling Rotary Laser Level RL HW / RL HW+ / RL HGW / RL HV / RL HVPW/RL HVPW-G 77-496 / 77-429 / 77-439 / 77-497 / 77-427/ 77-441 Please read these instructions before operating the product Auto-Levelling
Auto-Levelling Rotary Laser Level RL HW / RL HW+ / RL HGW / RL HV / RL HVPW/RL HVPW-G 77-496 / 77-429 / 77-439 / 77-497 / 77-427/ 77-441 Please read these instructions before operating the product Auto-Levelling
Pololu DRV8835 Dual Motor Driver Shield for Arduino
 Pololu DRV8835 Dual Motor Driver Shield for Arduino Pololu DRV8835 Dual Motor Driver Shield for Arduino, bottom view with dimensions. Overview This motor driver shield and its corresponding Arduino library
Pololu DRV8835 Dual Motor Driver Shield for Arduino Pololu DRV8835 Dual Motor Driver Shield for Arduino, bottom view with dimensions. Overview This motor driver shield and its corresponding Arduino library
Understanding Line Scan Camera Applications
 Understanding Line Scan Camera Applications Discover the benefits of line scan cameras, including perfect, high resolution images, and the ability to image large objects. A line scan camera has a single
Understanding Line Scan Camera Applications Discover the benefits of line scan cameras, including perfect, high resolution images, and the ability to image large objects. A line scan camera has a single
Design Report. IniTech for
 Design Report by IniTech for 14 th Annual Intelligent Ground Vehicle Competition University of Maryland: Baltimore County: Erik Broman (Team Lead and Requirement Lead) Albert Hsu (Design Lead) Sean Wilson
Design Report by IniTech for 14 th Annual Intelligent Ground Vehicle Competition University of Maryland: Baltimore County: Erik Broman (Team Lead and Requirement Lead) Albert Hsu (Design Lead) Sean Wilson
Color Mark Sensor with Red or Green LED E3S-VS
 Color Mark Sensor with Red or Green LED Rugged IP67 Color Mark Sensor 1 ms response time Detects a wide variety of color marks PNP or NPN output ls Light-on/ Dark-on operation, wire selectable Vertical
Color Mark Sensor with Red or Green LED Rugged IP67 Color Mark Sensor 1 ms response time Detects a wide variety of color marks PNP or NPN output ls Light-on/ Dark-on operation, wire selectable Vertical
CoaXPress White Paper WP-2: Cabling Solutions
 White Paper Authors Chris Beynon, Active Silicon Ltd Jochem Hermann, Adimec Advanced Image Systems BV Edited By Chris Beynon, Active Silicon Ltd Revision 1.0 27 November 2009 White Paper 1 Introduction...
White Paper Authors Chris Beynon, Active Silicon Ltd Jochem Hermann, Adimec Advanced Image Systems BV Edited By Chris Beynon, Active Silicon Ltd Revision 1.0 27 November 2009 White Paper 1 Introduction...
Lab 2.0 Thermal Camera Interface
 Lab 2.0 Thermal Camera Interface Lab 1 - Camera directional-stand (recap) The goal of the lab 1 series was to use a PS2 joystick to control the movement of a pan-tilt module. To this end, you implemented
Lab 2.0 Thermal Camera Interface Lab 1 - Camera directional-stand (recap) The goal of the lab 1 series was to use a PS2 joystick to control the movement of a pan-tilt module. To this end, you implemented
Basler scout AREA SCAN CAMERAS
 Basler scout AREA SCAN CAMERAS VGA to 2 megapixels and up to 120 fps Selected high quality CCD and CMOS sensors Gigabit Ethernet and FireWire-b interfaces Perfect fit for a variety of applications - extremely
Basler scout AREA SCAN CAMERAS VGA to 2 megapixels and up to 120 fps Selected high quality CCD and CMOS sensors Gigabit Ethernet and FireWire-b interfaces Perfect fit for a variety of applications - extremely
Arduino Due Back. Warning: Unlike other Arduino boards, the Arduino Due board runs at 3.3V. The maximum. Overview
 R Arduino Due Arduino Due Front Arduino Due Back Overview The Arduino Due is a microcontroller board based on the Atmel SAM3X8E ARM Cortex-M3 CPU (datasheet). It is the first Arduino board based on a 32-bit
R Arduino Due Arduino Due Front Arduino Due Back Overview The Arduino Due is a microcontroller board based on the Atmel SAM3X8E ARM Cortex-M3 CPU (datasheet). It is the first Arduino board based on a 32-bit
Adafruit BME280 Humidity + Barometric Pressure + Temperature Sensor Breakout
 Adafruit BME280 Humidity + Barometric Pressure + Temperature Sensor Breakout Created by lady ada Last updated on 2016-04-26 12:01:06 PM EDT Guide Contents Guide Contents Overview Pinouts Power Pins: SPI
Adafruit BME280 Humidity + Barometric Pressure + Temperature Sensor Breakout Created by lady ada Last updated on 2016-04-26 12:01:06 PM EDT Guide Contents Guide Contents Overview Pinouts Power Pins: SPI
Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205]
![Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205]](/thumbs/40/21161302.jpg "Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205]") Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205] Users Manual Robokits India [email protected] http://www.robokitsworld.com Page 1 Bluetooth + USB 16 Servo Controller is used to control up to
Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205] Users Manual Robokits India [email protected] http://www.robokitsworld.com Page 1 Bluetooth + USB 16 Servo Controller is used to control up to
Frequently Asked Questions (FAQs)
") Frequently Asked Questions (FAQs) OS5000 & OS4000 Family of Compasses FAQ Document Rev. 2.0 Important Notes: Please also reference the OS5000 family user guide & OS4000 user guide on our download page.
Frequently Asked Questions (FAQs) OS5000 & OS4000 Family of Compasses FAQ Document Rev. 2.0 Important Notes: Please also reference the OS5000 family user guide & OS4000 user guide on our download page.
STUDY OF CELLPHONE CHARGERS
 STUDY OF CELLPHONE CHARGERS Author : Suraj Hebbar Systems Lab, CeNSE,IISc Banglore ABSTRACT This report shows charging nature of different cellphone chargers with different cellphones. Here we took into
STUDY OF CELLPHONE CHARGERS Author : Suraj Hebbar Systems Lab, CeNSE,IISc Banglore ABSTRACT This report shows charging nature of different cellphone chargers with different cellphones. Here we took into
Arduino ADK Back. For information on using the board with the Android OS, see Google's ADK documentation.
 Arduino ADK Arduino ADK R3 Front Arduino ADK R3 Back Arduino ADK Front Arduino ADK Back Overview The Arduino ADK is a microcontroller board based on the ATmega2560 (datasheet). It has a USB host interface
Arduino ADK Arduino ADK R3 Front Arduino ADK R3 Back Arduino ADK Front Arduino ADK Back Overview The Arduino ADK is a microcontroller board based on the ATmega2560 (datasheet). It has a USB host interface
Using the Communication Ports on the DG-700 and DG-500 Digital Pressure Gauges
 Using the Communication Ports on the DG-700 and DG-500 Digital Pressure Gauges 1. USB and Serial Communication Ports: Newer DG-700 and DG-500 gauges contain both a USB and a DB-9 Serial Communication Port,
Using the Communication Ports on the DG-700 and DG-500 Digital Pressure Gauges 1. USB and Serial Communication Ports: Newer DG-700 and DG-500 gauges contain both a USB and a DB-9 Serial Communication Port,
PART 1 PRODUCT (GENERAL)...1.
...1.") TABLE OF CONTENTS PART 1 PRODUCT (GENERAL)...1. 1.1--PRODUCT INTRODUCTION...1. 1.2--PRODUCT FEATURES...1. 1.3--TECHNICAL SPECIFICATIONS...2. 1.4--PHOTOMETRIC DATA...3. 1.5--SAFETY WARNING...4. PART 2 INSTALLATION...5.
TABLE OF CONTENTS PART 1 PRODUCT (GENERAL)...1. 1.1--PRODUCT INTRODUCTION...1. 1.2--PRODUCT FEATURES...1. 1.3--TECHNICAL SPECIFICATIONS...2. 1.4--PHOTOMETRIC DATA...3. 1.5--SAFETY WARNING...4. PART 2 INSTALLATION...5.
PolyBot Board. User's Guide V1.11 9/20/08
 PolyBot Board User's Guide V1.11 9/20/08 PolyBot Board v1.1 16 pin LCD connector 4-pin SPI port (can be used as digital I/O) 10 Analog inputs +5V GND GND JP_PWR 3-pin logic power jumper (short top 2 pins
PolyBot Board User's Guide V1.11 9/20/08 PolyBot Board v1.1 16 pin LCD connector 4-pin SPI port (can be used as digital I/O) 10 Analog inputs +5V GND GND JP_PWR 3-pin logic power jumper (short top 2 pins
Tutorial for Programming the LEGO MINDSTORMS NXT
 Tutorial for Programming the LEGO MINDSTORMS NXT Table of contents 1 LEGO MINDSTORMS Overview 2 Hardware 2.1 The NXT Brick 2.2 The Servo Motors 2.3 The Sensors 3 Software 3.1 Starting a Program 3.2 The
Tutorial for Programming the LEGO MINDSTORMS NXT Table of contents 1 LEGO MINDSTORMS Overview 2 Hardware 2.1 The NXT Brick 2.2 The Servo Motors 2.3 The Sensors 3 Software 3.1 Starting a Program 3.2 The
Web Site: www.parallax.com Forums: forums.parallax.com Sales: [email protected] Technical: [email protected]
 Web Site: www.parallax.com Forums: forums.parallax.com Sales: [email protected] Technical: [email protected] Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: [email protected] Technical: [email protected] Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
PU-USBX. USB over Ethernet Extender OPERATION MANUAL
 PU-USBX USB over Ethernet Extender OPERATION MANUAL Safety Precautions Please read all instructions before attempting to unpack or install or operate this equipment, and before connecting the power supply.
PU-USBX USB over Ethernet Extender OPERATION MANUAL Safety Precautions Please read all instructions before attempting to unpack or install or operate this equipment, and before connecting the power supply.
MicroMag3 3-Axis Magnetic Sensor Module
 1008121 R01 April 2005 MicroMag3 3-Axis Magnetic Sensor Module General Description The MicroMag3 is an integrated 3-axis magnetic field sensing module designed to aid in evaluation and prototyping of PNI
1008121 R01 April 2005 MicroMag3 3-Axis Magnetic Sensor Module General Description The MicroMag3 is an integrated 3-axis magnetic field sensing module designed to aid in evaluation and prototyping of PNI
Bluetooth to serial HC-06 wireless module
 Bluetooth to serial HC-06 wireless module Product Description: 1,Mainstream CSR Bluetooth chip, Bluetooth V2.0 protocol standards 2,serial module operating voltage 3.3V. 3,the baud rate for 1200, 2400,
Bluetooth to serial HC-06 wireless module Product Description: 1,Mainstream CSR Bluetooth chip, Bluetooth V2.0 protocol standards 2,serial module operating voltage 3.3V. 3,the baud rate for 1200, 2400,
Monitoring Bulk Solids Inventory
 Bulk Solids Inventory exists in a wide range of industries including agriculture, grain processing, feed production, plastic processing, concrete production and many more. Reliable monitoring of these
Bulk Solids Inventory exists in a wide range of industries including agriculture, grain processing, feed production, plastic processing, concrete production and many more. Reliable monitoring of these
Basler pilot AREA SCAN CAMERAS
 Basler pilot AREA SCAN CAMERAS VGA to 5 megapixels and up to 210 fps Selected high quality CCD sensors Powerful Gigabit Ethernet interface Superb image quality at all Resolutions and frame rates OVERVIEW
Basler pilot AREA SCAN CAMERAS VGA to 5 megapixels and up to 210 fps Selected high quality CCD sensors Powerful Gigabit Ethernet interface Superb image quality at all Resolutions and frame rates OVERVIEW
Arduino Lesson 13. DC Motors. Created by Simon Monk
 Arduino Lesson 13. DC Motors Created by Simon Monk Guide Contents Guide Contents Overview Parts Part Qty Breadboard Layout Arduino Code Transistors Other Things to Do 2 3 4 4 4 6 7 9 11 Adafruit Industries
Arduino Lesson 13. DC Motors Created by Simon Monk Guide Contents Guide Contents Overview Parts Part Qty Breadboard Layout Arduino Code Transistors Other Things to Do 2 3 4 4 4 6 7 9 11 Adafruit Industries
Basler. Line Scan Cameras
 Basler Line Scan Cameras High-quality line scan technology meets a cost-effective GigE interface Real color support in a compact housing size Shading correction compensates for difficult lighting conditions
Basler Line Scan Cameras High-quality line scan technology meets a cost-effective GigE interface Real color support in a compact housing size Shading correction compensates for difficult lighting conditions
Flight Controller. Mini Fun Fly
 Flight Controller Mini Fun Fly Create by AbuseMarK 0 Mini FunFly Flight Controller Naze ( Introduction 6x6mm. 6 grams (no headers, 8 grams with). 000 degrees/second -axis MEMS gyro. auto-level capable
Flight Controller Mini Fun Fly Create by AbuseMarK 0 Mini FunFly Flight Controller Naze ( Introduction 6x6mm. 6 grams (no headers, 8 grams with). 000 degrees/second -axis MEMS gyro. auto-level capable
Design and implementation of modular home security system with short messaging system
 EPJ Web of Conferences 68, 00025 (2014) DOI: 10.1051/ epjconf/ 20146800025 C Owned by the authors, published by EDP Sciences, 2014 Design and implementation of modular home security system with short messaging
EPJ Web of Conferences 68, 00025 (2014) DOI: 10.1051/ epjconf/ 20146800025 C Owned by the authors, published by EDP Sciences, 2014 Design and implementation of modular home security system with short messaging
How To Read A Pipe From A Sensor
 Liquid Level Sensor Installation on pipes. Sensing by means electrostatic capacity and is not influenced by the color of the pipe or liquid. Available in 8 to mm dia. and to mm dia. models to enable sensing
Liquid Level Sensor Installation on pipes. Sensing by means electrostatic capacity and is not influenced by the color of the pipe or liquid. Available in 8 to mm dia. and to mm dia. models to enable sensing
EMR-9 Quick Start Guide (00175)D 1
D 1") NAC Eye Mark Recorder EMR-9 Quick Start Guide May 2009 NAC Image Technology Inc. (00175)D 1 Contents 1. System Configurations 1.1 Standard configuration 1.2 Head unit variations 1.3 Optional items 2. Basic
NAC Eye Mark Recorder EMR-9 Quick Start Guide May 2009 NAC Image Technology Inc. (00175)D 1 Contents 1. System Configurations 1.1 Standard configuration 1.2 Head unit variations 1.3 Optional items 2. Basic
e d u c a t i o n NXT Solar Station
 e d u c a t i o n NXT Solar Station de LEGO Group. 2010 The LEGO Group. e d u c a t i o n NXT Solar Station Description Investigating the NXT Solar Station s ability to generate power by data logging wattage
e d u c a t i o n NXT Solar Station de LEGO Group. 2010 The LEGO Group. e d u c a t i o n NXT Solar Station Description Investigating the NXT Solar Station s ability to generate power by data logging wattage
Application Note IMU Visualization Software
 ECE 480 Spring 2013 Team 8 Application Note IMU Visualization Software Name: Alex Mazzoni Date: 04/04/2013 Facilitator: Dr. Aviyente Abstract This application note covers how to use open source software
ECE 480 Spring 2013 Team 8 Application Note IMU Visualization Software Name: Alex Mazzoni Date: 04/04/2013 Facilitator: Dr. Aviyente Abstract This application note covers how to use open source software
PRODUCT SHEET OUT1 SPECIFICATIONS
 OUT SERIES Headphones OUT2 BNC Output Adapter OUT1 High Fidelity Headphones OUT1A Ultra-Wide Frequency Response Headphones OUT3 see Stimulators OUT100 Monaural Headphone 40HP Monaural Headphones OUT101
OUT SERIES Headphones OUT2 BNC Output Adapter OUT1 High Fidelity Headphones OUT1A Ultra-Wide Frequency Response Headphones OUT3 see Stimulators OUT100 Monaural Headphone 40HP Monaural Headphones OUT101
INTRODUCTION TO SERIAL ARM
 INTRODUCTION TO SERIAL ARM A robot manipulator consists of links connected by joints. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of
INTRODUCTION TO SERIAL ARM A robot manipulator consists of links connected by joints. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of
Geometric Optics Converging Lenses and Mirrors Physics Lab IV
 Objective Geometric Optics Converging Lenses and Mirrors Physics Lab IV In this set of lab exercises, the basic properties geometric optics concerning converging lenses and mirrors will be explored. The
Objective Geometric Optics Converging Lenses and Mirrors Physics Lab IV In this set of lab exercises, the basic properties geometric optics concerning converging lenses and mirrors will be explored. The
Android Controlled Based Interface
 Android Controlled Based Interface Objective Fix Foba Build Rofi (Fifth Generation Robot) Develop, Build, and Implement a Dynamic Balanced Biped Robot Table of Contents Objective... 1 Android Controlled
Android Controlled Based Interface Objective Fix Foba Build Rofi (Fifth Generation Robot) Develop, Build, and Implement a Dynamic Balanced Biped Robot Table of Contents Objective... 1 Android Controlled
A-307. Mobile Data Terminal. Android OS Platform Datasheet
 A-307 Mobile Data Terminal Android OS Platform Datasheet Revision 1.1 July, 2013 Introduction A-307 Platform Overview Introduction A-307 Platform Overview The A-307 provides Original Equipment Manufacturers
A-307 Mobile Data Terminal Android OS Platform Datasheet Revision 1.1 July, 2013 Introduction A-307 Platform Overview Introduction A-307 Platform Overview The A-307 provides Original Equipment Manufacturers
WXGA (1280 x 800), 3500 lumens, up to 7,000 hours lamp, HDMI, 1.49-1.79 throw ratio, wireless ViewSync
, 3500 lumens, up to 7,000 hours lamp, HDMI, 1.49-1.79 throw ratio, wireless ViewSync") WXGA (1280 x 800), 3500 lumens, up to 7,000 hours lamp, HDMI, 1.49-1.79 throw ratio, wireless ViewSync 3,500 Lumens Networkable WXGA DLP Projector Overview The PJD6544w, a 3500 lumens projector, is ViewSonic
WXGA (1280 x 800), 3500 lumens, up to 7,000 hours lamp, HDMI, 1.49-1.79 throw ratio, wireless ViewSync 3,500 Lumens Networkable WXGA DLP Projector Overview The PJD6544w, a 3500 lumens projector, is ViewSonic
Cypress Semiconductor: Arduino Friendly PSoC Shield
 Cypress Semiconductor: Arduino Friendly PSoC Shield Design Presentation ECE 480 Design Team 1 Cecilia Acosta Brett Donlon Matt Durak Aaron Thompson Nathan Ward Faculty Facilitator Dr. Robert McGough Sponsor
Cypress Semiconductor: Arduino Friendly PSoC Shield Design Presentation ECE 480 Design Team 1 Cecilia Acosta Brett Donlon Matt Durak Aaron Thompson Nathan Ward Faculty Facilitator Dr. Robert McGough Sponsor
Tutorial for MPLAB Starter Kit for PIC18F
 Tutorial for MPLAB Starter Kit for PIC18F 2006 Microchip Technology Incorporated. All Rights Reserved. WebSeminar Title Slide 1 Welcome to the tutorial for the MPLAB Starter Kit for PIC18F. My name is
Tutorial for MPLAB Starter Kit for PIC18F 2006 Microchip Technology Incorporated. All Rights Reserved. WebSeminar Title Slide 1 Welcome to the tutorial for the MPLAB Starter Kit for PIC18F. My name is
8 Channel Status Input Panel model SIP-8
 Description The Sine Systems model SIP-8 Status Input Panel is to be used with the RFC-1/B Remote Facilities Controller. It consists of a long PC board mounted on a 1.75 inch (1U) rack panel. The SIP-8
Description The Sine Systems model SIP-8 Status Input Panel is to be used with the RFC-1/B Remote Facilities Controller. It consists of a long PC board mounted on a 1.75 inch (1U) rack panel. The SIP-8