CSCI 445 Amin Atrash. Lecture #2: Motors and Gears. Introduction to Robotics L. Itti & M. J. Mataric
|
|
|
- Brandon Franklin
- 7 years ago
- Views:
Transcription
1 Introduction to Robotics CSCI 445 Amin Atrash Lecture #2: Motors and Gears
2 Today s Lecture Outline DC motors voltage, current, speed and torque current and work of a motor Gearing and gear ratios gearing up and down combining gears H-bridges Servo motors Pulse width modulation
 motor Advantages: simple,")

3 DC Motors The most common actuator in mobile robotics is the direct current (DC) motor Advantages: simple, cheap, various sizes and packages, easy to interface, clean. DC motors convert electrical into mechanical energy
4 How DC Motors Work DC motors consist of permanent magnets with loops of wire inside When current is applied, the wire loops generate a magnetic field, which reacts against the outside field of the static magnets The interaction of the fields produces the movement of the shaft/armature A commutator switches the direction of the current flow, yielding continuous motion





5 Types of DC motors Brushed motors (mechanical commutation) Low-voltage, low-torque, cheap

6 Types of DC motors Brushless motors (electronic commutation) High-voltage, high-torque, expensive No friction / wear of brushes
7 Motor Efficiency As any physical system, DC motors are not perfectly efficient Energy is not converted perfectly; some is wasted as heat generated by winding resistance and friction Inefficiencies are minimized in well-designed (more expensive) motors, and their efficiency can be high.
8 Motor Efficiency Good DC motors can be made to be have efficiencies in the 90 th percentile Cheap DC motors can be as low as 50% Other types of effectors, such as miniature electrostatic motors, may have much lower efficiencies still
9 Speed and Torque Motor speed ω is proportional to induced voltage V ω = k V V Motor torque t is proportional to applied current I: t = k I I Motors have a maximum speed (noload speed) and a maximum torque (stall torque)
10 Speed/Torque Relationship ω No-load speed V = 6 V = 3 stall torque t
11 Motor power Output power is proportional to the product of speed and torque: ω P = ω t V = 6 P t

12 Operating voltage and speed Motors have maximum voltage rating Higher voltages may overheat windings Motors have maximum speed rating Higher speeds may destroy bearings or commutator Operating motors at higher speeds/ voltages will reduce their life expectancy
13 DC motors and Robots DC motors have high-speed, low torque Typical speed range: 9,000 to 12,000 RPM 150 to 200 Hz Robots require low-speed, high torque => Motors must be geared
14 Gearing Gears are used to alter the output speed/torque of a motor (slope of speed/torque graph) ω Motor output Geared motor output t
15 Gear Fundamentals The force F at the edge of a gear of radius r is given by: F = t / r The linear speed v at the edge of a gear of radius r is given by: v = ω r
16 Combining Gears Given ω 1, what is ω 2? Given t 1, what is t 2?
 ω 1 And the output torque is: t 2 = (r 2 / r 1 ) t 1 r 2 / r 1 is known as the gear")
17 Combining Gears Meshing gears have equal linear speeds: v 1 = v 2 Thus the output speed is: ω 2 = (r 1 / r 2 ) ω 1 And the output torque is: t 2 = (r 2 / r 1 ) t 1 r 2 / r 1 is known as the gear ratio
18 Examples Gearing down: r 1 = 1, r 2 = 2 2:1 gear ratio doubles the torque and halves speed Gearing up: r 1 = 2, r 2 = 1 1:2 gear ratio halves torque and doubles speed

19 Gear Stages Usually it is not possible to achieve sufficient a gear ratio with a single pair of gears Gears can be arranged in stages The total gear ratio is the product of gear ratios for each stage E.g.: 4:1 x 4:1 = 16:1



20 Types of Gears Spur, worm, planetary Simple gears suffer from backlash (teeth not meshing completely)
21 Control of Motors DC motor speed is often controlled using pulse width modulation (PWM) Direction is controlled using an H-bridge Usually achieved using specialized circuitry Motors require much more power than electronics
22 H-Bridge Use MOSFETs instead of mechanical switches MOSFETS must withstand high currents and have low resistance

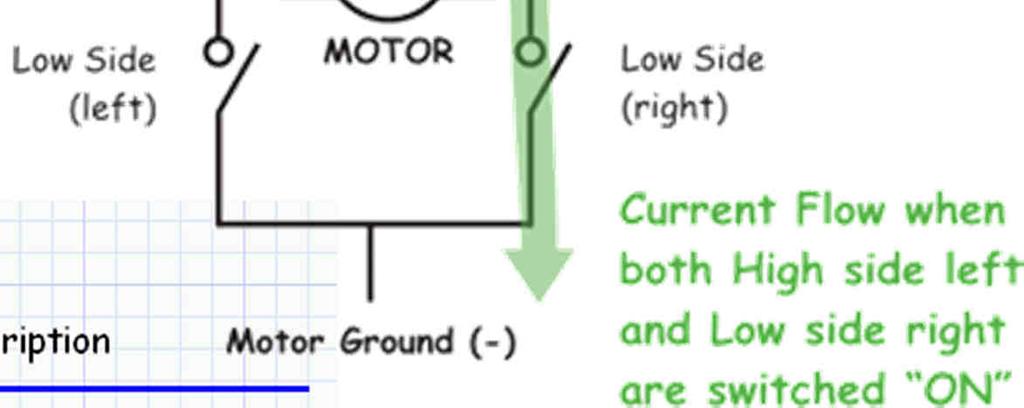
23 H-Bridge
24 PWM Speed Control ω = k V Vaverage


 electronic controller Range")
25 Servo Motors It is sometimes necessary to move a motor to a specific position DC motors are not built for this purpose, but servo motors are Servo motors are adapted DC motors: gear reduction position sensor (potentiometer) electronic controller Range of at least 180 degrees

26 Servo Motors

27 PWM Position Control
28 Transmission Gear is a form of Transmission One use: convert power Another use: Motor *not* located at joint Need to move power from motor to joint (wheel) Other forms: belts, chains, pulleys Issues: Backlash Friction Backdrivablity (moving motor moves input)
29 Control of Servo Motors Servo motors are controlled using PWM Width of pulses encodes desired position Pulse width must be very accurate Noise in width => noise in position Pulse rate may be variable Noise in rate => no change
30 Hacking Servo Motors Servo motors can be made to provide continuous rotation Remove mechanical shaft limits Replace position sensor with fixed resistors Pulse width now specifies output speed





31
32 Other Motors Pneumatic Compressed Air Light weight Clean Compliant Error due to compression Requires compressor Weak Hydraulic Motors Light Robust Very strong Offboard compressor (big) Expensive Messy
33 Textbook readings MM: Chapter 4 FM: 4.1, 4.2, 2.7, 2.6, 3.1, 3.2, 3.3, 3.5
Design Aspects of Robot Manipulators
 Design Aspects of Robot Manipulators Dr. Rohan Munasinghe Dept of Electronic and Telecommunication Engineering University of Moratuwa System elements Manipulator (+ proprioceptive sensors) End-effector
Design Aspects of Robot Manipulators Dr. Rohan Munasinghe Dept of Electronic and Telecommunication Engineering University of Moratuwa System elements Manipulator (+ proprioceptive sensors) End-effector
UNIT II Robots Drive Systems and End Effectors Part-A Questions
 UNIT II Robots Drive Systems and End Effectors Part-A Questions 1. Define End effector. End effector is a device that is attached to the end of the wrist arm to perform specific task. 2. Give some examples
UNIT II Robots Drive Systems and End Effectors Part-A Questions 1. Define End effector. End effector is a device that is attached to the end of the wrist arm to perform specific task. 2. Give some examples
Simple Analysis for Brushless DC Motors Case Study: Razor Scooter Wheel Motor
 Simple Analysis for Brushless DC Motors Case Study: Razor Scooter Wheel Motor At first glance, a brushless direct-current (BLDC) motor might seem more complicated than a permanent magnet brushed DC motor,
Simple Analysis for Brushless DC Motors Case Study: Razor Scooter Wheel Motor At first glance, a brushless direct-current (BLDC) motor might seem more complicated than a permanent magnet brushed DC motor,
Application Information
 Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
Brush DC Motor Basics. by Simon Pata Business Unit Manager, Brushless DC
 thinkmotion Brush DC Motor Basics by Simon Pata Business Unit Manager, Brushless DC Ironless DC Motor Basics Technical Note Brushed DC ironless motors are found in a large variety of products and applications
thinkmotion Brush DC Motor Basics by Simon Pata Business Unit Manager, Brushless DC Ironless DC Motor Basics Technical Note Brushed DC ironless motors are found in a large variety of products and applications
Electric Motors and Drives
 EML 2322L MAE Design and Manufacturing Laboratory Electric Motors and Drives To calculate the peak power and torque produced by an electric motor, you will need to know the following: Motor supply voltage,
EML 2322L MAE Design and Manufacturing Laboratory Electric Motors and Drives To calculate the peak power and torque produced by an electric motor, you will need to know the following: Motor supply voltage,
Current Loop Tuning Procedure. Servo Drive Current Loop Tuning Procedure (intended for Analog input PWM output servo drives) General Procedure AN-015
 General Procedure AN-015") Servo Drive Current Loop Tuning Procedure (intended for Analog input PWM output servo drives) The standard tuning values used in ADVANCED Motion Controls drives are conservative and work well in over 90%
Servo Drive Current Loop Tuning Procedure (intended for Analog input PWM output servo drives) The standard tuning values used in ADVANCED Motion Controls drives are conservative and work well in over 90%
Motors and Generators
 Motors and Generators Electro-mechanical devices: convert electrical energy to mechanical motion/work and vice versa Operate on the coupling between currentcarrying conductors and magnetic fields Governed
Motors and Generators Electro-mechanical devices: convert electrical energy to mechanical motion/work and vice versa Operate on the coupling between currentcarrying conductors and magnetic fields Governed
AMZ-FX Guitar effects. (2007) Mosfet Body Diodes. http://www.muzique.com/news/mosfet-body-diodes/. Accessed 22/12/09.
 Mosfet Body Diodes. http://www.muzique.com/news/mosfet-body-diodes/. Accessed 22/12/09.") Pulse width modulation Pulse width modulation is a pulsed DC square wave, commonly used to control the on-off switching of a silicon controlled rectifier via the gate. There are many types of SCR s, most
Pulse width modulation Pulse width modulation is a pulsed DC square wave, commonly used to control the on-off switching of a silicon controlled rectifier via the gate. There are many types of SCR s, most
Thermodynamic efficiency of an actuator that provides the mechanical movement for the driven equipments:
 1. Introduction 1.1. Industry Automation Industry automation is the term that describes a vital development programme of a production community where the project engineers build up automated manufacturing
1. Introduction 1.1. Industry Automation Industry automation is the term that describes a vital development programme of a production community where the project engineers build up automated manufacturing
Miniature High-Torque, DC Servomotors and DC Gearmotors
 typical applications Robotics Factory automation Medical equipment Computer peripherals and office equipment Portable, battery-operated equipment Textile machinery Packaging machinery Actuators Miniature
typical applications Robotics Factory automation Medical equipment Computer peripherals and office equipment Portable, battery-operated equipment Textile machinery Packaging machinery Actuators Miniature
DC Motor control Reversing
 January 2013 DC Motor control Reversing and a "Rotor" which is the rotating part. Basically there are three types of DC Motor available: - Brushed Motor - Brushless Motor - Stepper Motor DC motors Electrical
January 2013 DC Motor control Reversing and a "Rotor" which is the rotating part. Basically there are three types of DC Motor available: - Brushed Motor - Brushless Motor - Stepper Motor DC motors Electrical
Tips For Selecting DC Motors For Your Mobile Robot
 Tips For Selecting DC Motors For Your Mobile Robot By AJ Neal When building a mobile robot, selecting the drive motors is one of the most important decisions you will make. It is a perfect example of an
Tips For Selecting DC Motors For Your Mobile Robot By AJ Neal When building a mobile robot, selecting the drive motors is one of the most important decisions you will make. It is a perfect example of an
Speed Control Methods of Various Types of Speed Control Motors. Kazuya SHIRAHATA
 Speed Control Methods of Various Types of Speed Control Motors Kazuya SHIRAHATA Oriental Motor Co., Ltd. offers a wide variety of speed control motors. Our speed control motor packages include the motor,
Speed Control Methods of Various Types of Speed Control Motors Kazuya SHIRAHATA Oriental Motor Co., Ltd. offers a wide variety of speed control motors. Our speed control motor packages include the motor,
BRUSHLESS DC MOTORS. BLDC 22mm. BLDC Gearmotor Size 9. nuvodisc 32BF. BLDC Gearmotor Size 5
 BRUSHLESS DC MOTORS BLDC Gearmotor Size 9 BLDC 22mm nuvodisc 32BF BLDC Gearmotor Size 5 Portescap Brushless DC motors are extremely reliable and built to deliver the best performances. Their high power
BRUSHLESS DC MOTORS BLDC Gearmotor Size 9 BLDC 22mm nuvodisc 32BF BLDC Gearmotor Size 5 Portescap Brushless DC motors are extremely reliable and built to deliver the best performances. Their high power
Motor Fundamentals. DC Motor
 Motor Fundamentals Before we can examine the function of a drive, we must understand the basic operation of the motor. It is used to convert the electrical energy, supplied by the controller, to mechanical
Motor Fundamentals Before we can examine the function of a drive, we must understand the basic operation of the motor. It is used to convert the electrical energy, supplied by the controller, to mechanical
Servo Info and Centering
 Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation. Prof. Dr. Hani Hagras
 1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
Moving Magnet Actuator MI FFA series
 Moving Magnet Actuator MI FFA series The moving magnet MI-FFA series actuators are a line of actuators designed to be a true alternative for pneumatic cylinders. The actuators incorporate an ISO 6432 interface
Moving Magnet Actuator MI FFA series The moving magnet MI-FFA series actuators are a line of actuators designed to be a true alternative for pneumatic cylinders. The actuators incorporate an ISO 6432 interface
Principles of Adjustable Frequency Drives
 What is an Adjustable Frequency Drive? An adjustable frequency drive is a system for controlling the speed of an AC motor by controlling the frequency of the power supplied to the motor. A basic adjustable
What is an Adjustable Frequency Drive? An adjustable frequency drive is a system for controlling the speed of an AC motor by controlling the frequency of the power supplied to the motor. A basic adjustable
Direct Current Motors
 Direct Current Motors DC MOTORS The DC machine can operate as a generator and as a motor. Chap 5. Electrical Machines by Wildi, 6 e Lecturer: R. Alba-Flores Alfred State College Spring 2008 When a DC machine
Direct Current Motors DC MOTORS The DC machine can operate as a generator and as a motor. Chap 5. Electrical Machines by Wildi, 6 e Lecturer: R. Alba-Flores Alfred State College Spring 2008 When a DC machine
Application Information Fully Integrated Hall Effect Motor Driver for Brushless DC Vibration Motor Applications
 Application Information Fully Integrated Hall Effect Motor Driver for Brushless DC Vibration Motor Applications By Shaun Milano Vibration motors are used in a variety of applications including mobile phone
Application Information Fully Integrated Hall Effect Motor Driver for Brushless DC Vibration Motor Applications By Shaun Milano Vibration motors are used in a variety of applications including mobile phone
INSTRUMENTATION AND CONTROL TUTORIAL 2 ELECTRIC ACTUATORS
 INSTRUMENTATION AND CONTROL TUTORIAL 2 ELECTRIC ACTUATORS This is a stand alone tutorial on electric motors and actuators. The tutorial is of interest to any student studying control systems and in particular
INSTRUMENTATION AND CONTROL TUTORIAL 2 ELECTRIC ACTUATORS This is a stand alone tutorial on electric motors and actuators. The tutorial is of interest to any student studying control systems and in particular
SECTION 4 ELECTRIC MOTORS UNIT 17: TYPES OF ELECTRIC MOTORS
 SECTION 4 ELECTRIC MOTORS UNIT 17: TYPES OF ELECTRIC MOTORS UNIT OBJECTIVES After studying this unit, the reader should be able to Describe the different types of open single-phase motors used to drive
SECTION 4 ELECTRIC MOTORS UNIT 17: TYPES OF ELECTRIC MOTORS UNIT OBJECTIVES After studying this unit, the reader should be able to Describe the different types of open single-phase motors used to drive
Alternative Linear Motion Systems. Iron Core Linear Motors
 Alternative Linear Motion Systems ME EN 7960 Precision Machine Design Topic 5 ME EN 7960 Precision Machine Design Alternative Linear Motion Systems 5-1 Iron Core Linear Motors Provide actuation forces
Alternative Linear Motion Systems ME EN 7960 Precision Machine Design Topic 5 ME EN 7960 Precision Machine Design Alternative Linear Motion Systems 5-1 Iron Core Linear Motors Provide actuation forces
Equipment: Power Supply, DAI, Wound rotor induction motor (8231), Electrodynamometer (8960), timing belt.
, Electrodynamometer (8960), timing belt.") Lab 13: Wound rotor induction motor. Objective: to examine the construction of a 3-phase wound rotor induction motor; to understand exciting current, synchronous speed and slip in this motor; to determine
Lab 13: Wound rotor induction motor. Objective: to examine the construction of a 3-phase wound rotor induction motor; to understand exciting current, synchronous speed and slip in this motor; to determine
FRC WPI Robotics Library Overview
 FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
WIND TURBINE TECHNOLOGY
 Module 2.2-2 WIND TURBINE TECHNOLOGY Electrical System Gerhard J. Gerdes Workshop on Renewable Energies November 14-25, 2005 Nadi, Republic of the Fiji Islands Contents Module 2.2 Types of generator systems
Module 2.2-2 WIND TURBINE TECHNOLOGY Electrical System Gerhard J. Gerdes Workshop on Renewable Energies November 14-25, 2005 Nadi, Republic of the Fiji Islands Contents Module 2.2 Types of generator systems
D.C. Motors. Products and specifications subject to change without notice.
 D.C. Motors Order/Technical Support - Tel: (8) 677-5 / FAX: (8) 677-865 / www.crouzet-usa.com / DC Motors Selection guide Gearbox Speed Torque max (Nm).5. Type of Gearbox 8 8 8. Power usable (w) Torque
D.C. Motors Order/Technical Support - Tel: (8) 677-5 / FAX: (8) 677-865 / www.crouzet-usa.com / DC Motors Selection guide Gearbox Speed Torque max (Nm).5. Type of Gearbox 8 8 8. Power usable (w) Torque
Chen. Vibration Motor. Application note
 Vibration Motor Application note Yangyi Chen April 4 th, 2013 1 Table of Contents Pages Executive Summary ---------------------------------------------------------------------------------------- 1 1. Table
Vibration Motor Application note Yangyi Chen April 4 th, 2013 1 Table of Contents Pages Executive Summary ---------------------------------------------------------------------------------------- 1 1. Table
Inductance. Motors. Generators
 Inductance Motors Generators Self-inductance Self-inductance occurs when the changing flux through a circuit arises from the circuit itself. As the current increases, the magnetic flux through a loop due
Inductance Motors Generators Self-inductance Self-inductance occurs when the changing flux through a circuit arises from the circuit itself. As the current increases, the magnetic flux through a loop due
EFC 3600. Frequency converters
 2 Bosch Rexroth AG Electric Drives and Controls Documentation Compact and complete: space saving side-by-side assembly, plug-in I/O terminals, with brake chopper and mains filter for ultra-simple installation
2 Bosch Rexroth AG Electric Drives and Controls Documentation Compact and complete: space saving side-by-side assembly, plug-in I/O terminals, with brake chopper and mains filter for ultra-simple installation
motion solutions for leisure, mobility and industrial applications www.parvalux.com
 motion solutions for leisure, mobility and industrial applications www.parvalux.com designed for application bespoke DC gear-motor solutions 2 STAIR LIFT unique worm-spur double reduction gearbox delivering
motion solutions for leisure, mobility and industrial applications www.parvalux.com designed for application bespoke DC gear-motor solutions 2 STAIR LIFT unique worm-spur double reduction gearbox delivering
Flow Charts and Servomotors (background to Lab #2) Things to learn about: flow charts for design. MECH452 2014 Lecture #2 flow charts & servos rev2
 Things to learn about: flow charts for design. MECH452 2014 Lecture #2 flow charts & servos rev2") MECH 452 Lecture #2 Flow Charts and Servomotors (background to Lab #2) 1 2 Handout #2 (highlights, questions) Things to learn about: flow charts for design Only 5 symbols (subroutine not shown) Flow charts
MECH 452 Lecture #2 Flow Charts and Servomotors (background to Lab #2) 1 2 Handout #2 (highlights, questions) Things to learn about: flow charts for design Only 5 symbols (subroutine not shown) Flow charts
Choosing Between Electromechanical and Fluid Power Linear Actuators in Industrial Systems Design
 Choosing Between Electromechanical and Fluid Power Linear Actuators in Industrial Systems Design James Marek, Business Unit Director, Thomson Systems Thomson Industries, Inc. 540-633-3549 www.thomsonlinear.com
Choosing Between Electromechanical and Fluid Power Linear Actuators in Industrial Systems Design James Marek, Business Unit Director, Thomson Systems Thomson Industries, Inc. 540-633-3549 www.thomsonlinear.com
PRODUCTS DC MOTORS BLPM MOTORS AC MOTORS CONTROLLERS
 D R I V E S Y S T E M S PRODUCTS DC MOTORS BLPM MOTORS AC MOTORS CONTROLLERS The vision of Iskra Avtoelektrika is to be: One of the world's leading manufacturers of electric motors and controllers for
D R I V E S Y S T E M S PRODUCTS DC MOTORS BLPM MOTORS AC MOTORS CONTROLLERS The vision of Iskra Avtoelektrika is to be: One of the world's leading manufacturers of electric motors and controllers for
A descriptive definition of valve actuators
 A descriptive definition of valve actuators Abstract A valve actuator is any device that utilizes a source of power to operate a valve. This source of power can be a human being working a manual gearbox
A descriptive definition of valve actuators Abstract A valve actuator is any device that utilizes a source of power to operate a valve. This source of power can be a human being working a manual gearbox
Using Arduino Microcontrollers to Sense DC Motor Speed and Position
 ECE480 Design Team 3 Using Arduino Microcontrollers to Sense DC Motor Speed and Position Tom Manner April 4, 2011 page 1 of 7 Table of Contents 1. Introduction ----------------------------------------------------------
ECE480 Design Team 3 Using Arduino Microcontrollers to Sense DC Motor Speed and Position Tom Manner April 4, 2011 page 1 of 7 Table of Contents 1. Introduction ----------------------------------------------------------
Phase-Control Alternatives for Single-Phase AC Motors Offer Smart, Low-Cost, Solutions Abstract INTRODUCTION
 Phase-Control Alternatives for Single-Phase AC Motors Offer Smart, Low-Cost, Solutions by Howard Abramowitz, Ph.D EE, President, AirCare Automation Inc. Abstract - Single Phase AC motors continue to be
Phase-Control Alternatives for Single-Phase AC Motors Offer Smart, Low-Cost, Solutions by Howard Abramowitz, Ph.D EE, President, AirCare Automation Inc. Abstract - Single Phase AC motors continue to be
AUTOMATIC TRANSMISSION IN-CAR DIAGNOSTICS
 Learning Guide CHASSIS ELECTRICAL SPECIALIST AUTOMATIC TRANSMISSION IN-CAR DIAGNOSTICS COURSE NUMBER: C050-01 Notice Due to the wide range of vehicles makes and models, the information given during the
Learning Guide CHASSIS ELECTRICAL SPECIALIST AUTOMATIC TRANSMISSION IN-CAR DIAGNOSTICS COURSE NUMBER: C050-01 Notice Due to the wide range of vehicles makes and models, the information given during the
EET272 Worksheet Week 9
 EET272 Worksheet Week 9 answer questions 1-5 in preparation for discussion for the quiz on Monday. Finish the rest of the questions for discussion in class on Wednesday. Question 1 Questions AC s are becoming
EET272 Worksheet Week 9 answer questions 1-5 in preparation for discussion for the quiz on Monday. Finish the rest of the questions for discussion in class on Wednesday. Question 1 Questions AC s are becoming
LOW VOLTAGE D.C. MOTORS & GEARBOX UNITS
 LOW D.C. MOTORS & GEARBOX UNITS Printed on 100% recycled paper. 918D SERIES SINGLE RATIO METAL GEARBOX (RE280 MOTOR/RE 280/1 MOTOR) NEW! NEW! NEW! NEW! NEW! WITH 2mm OUTPUT SHAFT (15:1 ONLY) WITH 4mm OUTPUT
LOW D.C. MOTORS & GEARBOX UNITS Printed on 100% recycled paper. 918D SERIES SINGLE RATIO METAL GEARBOX (RE280 MOTOR/RE 280/1 MOTOR) NEW! NEW! NEW! NEW! NEW! WITH 2mm OUTPUT SHAFT (15:1 ONLY) WITH 4mm OUTPUT
CIM Computer Integrated Manufacturing
 INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
WHITE PAPER. DC Motors Explained. DC Motors Explained: White Paper, Title Page
 DC Motors Explained: White Paper, Title Page DC Motors Explained By Joe Kimbrell, Product Manager, Drives, Motors & Motion, AutomationDirect DC Motors Explained: White Paper, pg. 2 How many types of DC
DC Motors Explained: White Paper, Title Page DC Motors Explained By Joe Kimbrell, Product Manager, Drives, Motors & Motion, AutomationDirect DC Motors Explained: White Paper, pg. 2 How many types of DC
8 Speed control of Induction Machines
 8 Speed control of Induction Machines We have seen the speed torque characteristic of the machine. In the stable region of operation in the motoring mode, the curve is rather steep and goes from zero torque
8 Speed control of Induction Machines We have seen the speed torque characteristic of the machine. In the stable region of operation in the motoring mode, the curve is rather steep and goes from zero torque
Torque motors. direct drive technology
 Torque motors direct drive technology Why Direct Drive Motors? Fast and effective Direct-drive technology in mechanical engineering is defined as the use of actuators which transfer their power directly
Torque motors direct drive technology Why Direct Drive Motors? Fast and effective Direct-drive technology in mechanical engineering is defined as the use of actuators which transfer their power directly
Lab 8: DC generators: shunt, series, and compounded.
 Lab 8: DC generators: shunt, series, and compounded. Objective: to study the properties of DC generators under no-load and full-load conditions; to learn how to connect these generators; to obtain their
Lab 8: DC generators: shunt, series, and compounded. Objective: to study the properties of DC generators under no-load and full-load conditions; to learn how to connect these generators; to obtain their
DIRECT CURRENT GENERATORS
 DIRECT CURRENT GENERATORS Revision 12:50 14 Nov 05 INTRODUCTION A generator is a machine that converts mechanical energy into electrical energy by using the principle of magnetic induction. This principle
DIRECT CURRENT GENERATORS Revision 12:50 14 Nov 05 INTRODUCTION A generator is a machine that converts mechanical energy into electrical energy by using the principle of magnetic induction. This principle
2. A conductor of length 2m moves at 4m/s at 30 to a uniform magnetic field of 0.1T. Which one of the following gives the e.m.f. generated?
 Extra Questions - 2 1. A straight length of wire moves through a uniform magnetic field. The e.m.f. produced across the ends of the wire will be maximum if it moves: a) along the lines of magnetic flux
Extra Questions - 2 1. A straight length of wire moves through a uniform magnetic field. The e.m.f. produced across the ends of the wire will be maximum if it moves: a) along the lines of magnetic flux
BALDOR ELECTRIC COMPANY SERVO CONTROL FACTS A HANDBOOK EXPLAINING THE BASICS OF MOTION
 BALDOR ELECTRIC COMPANY SERVO CONTROL FACTS A HANDBOOK EXPLAINING THE BASICS OF MOTION MN1205 TABLE OF CONTENTS TYPES OF MOTORS.............. 3 OPEN LOOP/CLOSED LOOP..... 9 WHAT IS A SERVO..............
BALDOR ELECTRIC COMPANY SERVO CONTROL FACTS A HANDBOOK EXPLAINING THE BASICS OF MOTION MN1205 TABLE OF CONTENTS TYPES OF MOTORS.............. 3 OPEN LOOP/CLOSED LOOP..... 9 WHAT IS A SERVO..............
Harmonic Drive acutator P r e c i s i o n G e a r i n g & M o t i o n C o n t r o l
 D C S e r v o S y s t e m s RH Mini Series Total Motion Control Harmonic Drive acutator P r e c i s i o n G e a r i n g & M o t i o n C o n t r o l Precision Gearing & Motion Control DC SERVO ACTUATORS
D C S e r v o S y s t e m s RH Mini Series Total Motion Control Harmonic Drive acutator P r e c i s i o n G e a r i n g & M o t i o n C o n t r o l Precision Gearing & Motion Control DC SERVO ACTUATORS
Digital vs. Analogue Control Systems
 Digital vs. Analogue Control Systems Presented at the 2011 Annual Meeting of the American College of Medical Physics, Chattanooga, TN, May 1, 2011 Ivan A. Brezovich, PhD, Dept. of Rad Onc, Univ of Alabama
Digital vs. Analogue Control Systems Presented at the 2011 Annual Meeting of the American College of Medical Physics, Chattanooga, TN, May 1, 2011 Ivan A. Brezovich, PhD, Dept. of Rad Onc, Univ of Alabama
Selecting and Implementing H-Bridges in DC Motor Control. Daniel Phan A37005649
 Selecting and Implementing H-Bridges in DC Motor Control Daniel Phan A37005649 ECE 480 Design Team 3 Spring 2011 Abstract DC motors can be used in a number of applications that require automated movements.
Selecting and Implementing H-Bridges in DC Motor Control Daniel Phan A37005649 ECE 480 Design Team 3 Spring 2011 Abstract DC motors can be used in a number of applications that require automated movements.
Sensors Collecting Manufacturing Process Data
 Sensors & Actuators Sensors Collecting Manufacturing Process Data Data must be collected from the manufacturing process Data (commands and instructions) must be communicated to the process Data are of
Sensors & Actuators Sensors Collecting Manufacturing Process Data Data must be collected from the manufacturing process Data (commands and instructions) must be communicated to the process Data are of
SPEED CONTROL SYSTEM
 SPEED CONTROL SYSTEM INDEX SPEED CONTROL MOTOR FEATURES 144 6W ( 70mm) 153 10W ( 70mm) 155 15W ( 80mm) 157 25W ( 80mm) 159 40W ( 90mm) 161 SPEED CONTROL W ( 90mm) 163 90W ( 90mm) 165 120W ( 90mm) 168 180W
SPEED CONTROL SYSTEM INDEX SPEED CONTROL MOTOR FEATURES 144 6W ( 70mm) 153 10W ( 70mm) 155 15W ( 80mm) 157 25W ( 80mm) 159 40W ( 90mm) 161 SPEED CONTROL W ( 90mm) 163 90W ( 90mm) 165 120W ( 90mm) 168 180W
X8 Option 2 - Technology
 moog AC DC AC 4 to 450 A 4 to 210 A Compact MSD Servo Drive TTL in out Specification X8 Option 2 - Technology TTL Encoder Simulation / TTL Master Encoder moog Specification Option 2 - Technology TTL encoder
moog AC DC AC 4 to 450 A 4 to 210 A Compact MSD Servo Drive TTL in out Specification X8 Option 2 - Technology TTL Encoder Simulation / TTL Master Encoder moog Specification Option 2 - Technology TTL encoder
Miniaturized linear motion
 Miniaturized linear motion Test and measurement, semiconductor, and precision medical applications are pushing the envelope of modern motion designs. In these and other applications, compact linear motion
Miniaturized linear motion Test and measurement, semiconductor, and precision medical applications are pushing the envelope of modern motion designs. In these and other applications, compact linear motion
DC GENERATOR THEORY. LIST the three conditions necessary to induce a voltage into a conductor.
 DC Generators DC generators are widely used to produce a DC voltage. The amount of voltage produced depends on a variety of factors. EO 1.5 LIST the three conditions necessary to induce a voltage into
DC Generators DC generators are widely used to produce a DC voltage. The amount of voltage produced depends on a variety of factors. EO 1.5 LIST the three conditions necessary to induce a voltage into
CNC Machine Control Unit
 NC Hardware a NC Hardware CNC Machine Control Unit Servo Drive Control Hydraulic Servo Drive Hydraulic power supply unit Servo valve Servo amplifiers Hydraulic motor Hydraulic Servo Valve Hydraulic Servo
NC Hardware a NC Hardware CNC Machine Control Unit Servo Drive Control Hydraulic Servo Drive Hydraulic power supply unit Servo valve Servo amplifiers Hydraulic motor Hydraulic Servo Valve Hydraulic Servo
B.TECH. (AEROSPACE ENGINEERING) PROGRAMME (BTAE) Term-End Examination December, 2011 BAS-010 : MACHINE DESIGN
 PROGRAMME (BTAE) Term-End Examination December, 2011 BAS-010 : MACHINE DESIGN") No. of Printed Pages : 7 BAS-01.0 B.TECH. (AEROSPACE ENGINEERING) PROGRAMME (BTAE) CV CA CV C:) O Term-End Examination December, 2011 BAS-010 : MACHINE DESIGN Time : 3 hours Maximum Marks : 70 Note : (1)
No. of Printed Pages : 7 BAS-01.0 B.TECH. (AEROSPACE ENGINEERING) PROGRAMME (BTAE) CV CA CV C:) O Term-End Examination December, 2011 BAS-010 : MACHINE DESIGN Time : 3 hours Maximum Marks : 70 Note : (1)
INSTRUMENTATION AND CONTROL TUTORIAL 3 SIGNAL PROCESSORS AND RECEIVERS
 INSTRUMENTATION AND CONTROL TUTORIAL 3 SIGNAL PROCESSORS AND RECEIVERS This tutorial provides an overview of signal processing and conditioning for use in instrumentation and automatic control systems.
INSTRUMENTATION AND CONTROL TUTORIAL 3 SIGNAL PROCESSORS AND RECEIVERS This tutorial provides an overview of signal processing and conditioning for use in instrumentation and automatic control systems.
Transmission electronic controls outline. Inputs- processing- outputs
 Transmission electronic controls outline Inputs- processing- outputs Inputs provide the system the environmental conditions that are needed to operate or check the operation of the transmission. Inputs
Transmission electronic controls outline Inputs- processing- outputs Inputs provide the system the environmental conditions that are needed to operate or check the operation of the transmission. Inputs
SERVOMECH Linear Actuators
 . SERVOMECH Linear actuators SERVOMECH mechanical linear actuators are motorised mechanical cylinders able to transform the rotary motion of a motor into the linear motion of a push rod. They are designed
. SERVOMECH Linear actuators SERVOMECH mechanical linear actuators are motorised mechanical cylinders able to transform the rotary motion of a motor into the linear motion of a push rod. They are designed
ELECTROMECHANICAL ACTUATION FOR LAUNCH VECHICLES
 ELECTROMECHANICAL ACTUATION FOR LAUNCH VECHICLES Presented By: Mark A. Davis Moog Inc. 37th AIAA/ASME/SAE/ASEE Joint Propulsion Conference Salt Lake City, Utah July 10, 2001 Introduction This paper describes
ELECTROMECHANICAL ACTUATION FOR LAUNCH VECHICLES Presented By: Mark A. Davis Moog Inc. 37th AIAA/ASME/SAE/ASEE Joint Propulsion Conference Salt Lake City, Utah July 10, 2001 Introduction This paper describes
Solution: Angular velocity in consistent units (Table 8.1): 753.8. Velocity of a point on the disk: Rate at which bits pass by the read/write head:
: 753.8. Velocity of a point on the disk: Rate at which bits pass by the read/write head:") Problem P8: The disk in a computer hard drive spins at 7200 rpm At the radius of 0 mm, a stream of data is magnetically written on the disk, and the spacing between data bits is 25 μm Determine the number
Problem P8: The disk in a computer hard drive spins at 7200 rpm At the radius of 0 mm, a stream of data is magnetically written on the disk, and the spacing between data bits is 25 μm Determine the number
Transformer circuit calculations
 Transformer circuit calculations This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Transformer circuit calculations This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
AC generator theory. Resources and methods for learning about these subjects (list a few here, in preparation for your research):
:") AC generator theory This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
AC generator theory This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
How to Turn an AC Induction Motor Into a DC Motor (A Matter of Perspective) Steve Bowling Application Segments Engineer Microchip Technology, Inc.
 Steve Bowling Application Segments Engineer Microchip Technology, Inc.") 1 How to Turn an AC Induction Motor Into a DC Motor (A Matter of Perspective) Steve Bowling Application Segments Engineer Microchip Technology, Inc. The territory of high-performance motor control has
1 How to Turn an AC Induction Motor Into a DC Motor (A Matter of Perspective) Steve Bowling Application Segments Engineer Microchip Technology, Inc. The territory of high-performance motor control has
CNC HARDWARE & TOOLING BASICS
 Computer Aided Manufacturing (CAM) CNC HARDWARE & TOOLING BASICS Assoc. Prof. Dr. Tamer S. Mahmoud 1. Parts of CNC Machine Tools Any CNC machine tool essentially consists of the following parts: Part Program,
Computer Aided Manufacturing (CAM) CNC HARDWARE & TOOLING BASICS Assoc. Prof. Dr. Tamer S. Mahmoud 1. Parts of CNC Machine Tools Any CNC machine tool essentially consists of the following parts: Part Program,
Typical ECM/PCM Inputs
 Typical ECM/PCM Inputs The computer system components fall into two categories: sensors (inputs) and controlled components (outputs). Each system has sensors. Not every system has all the ones listed,
Typical ECM/PCM Inputs The computer system components fall into two categories: sensors (inputs) and controlled components (outputs). Each system has sensors. Not every system has all the ones listed,
Mechanical Cylinders
 Mechanical Cylinders 1 Wormgear 2 Spherical plain bearings 3 Motor flange, IEC-norm 4 Lubricator 5 Air vent 6 Spindle nut 7 Trapezoidal spindle 8 Cylinder tube 9 Piston tube 10 Sealing 11 Wiper 12 Rotation
Mechanical Cylinders 1 Wormgear 2 Spherical plain bearings 3 Motor flange, IEC-norm 4 Lubricator 5 Air vent 6 Spindle nut 7 Trapezoidal spindle 8 Cylinder tube 9 Piston tube 10 Sealing 11 Wiper 12 Rotation
Stepper motor I/O. Application Note DK9222-0410-0014 Motion Control. A General information on stepper motors
 Stepper motor Keywords Stepper motor Fieldbus Microstepping Encoder Phase current Travel distance control Speed interface KL2531 KL2541 Part A of this Application Example provides general information on
Stepper motor Keywords Stepper motor Fieldbus Microstepping Encoder Phase current Travel distance control Speed interface KL2531 KL2541 Part A of this Application Example provides general information on
Electric Coolant Pumps. Always at the Correct Temperature
 Electric Coolant Pumps Always at the Correct Temperature Electric coolant pumps Conventional pumps for engine cooling are driven by toothed belts and hence their output is coupled to engine RPM. Coolant
Electric Coolant Pumps Always at the Correct Temperature Electric coolant pumps Conventional pumps for engine cooling are driven by toothed belts and hence their output is coupled to engine RPM. Coolant
C Standard AC Motors
 C Standard AC Standard AC C-1 Overview, Product Series... C-2 Constant... C-9 C-21 C-113 Reversible C-147 Overview, Product Series Constant Reversible Electromagnetic Brake C-155 Electromagnetic Brake
C Standard AC Standard AC C-1 Overview, Product Series... C-2 Constant... C-9 C-21 C-113 Reversible C-147 Overview, Product Series Constant Reversible Electromagnetic Brake C-155 Electromagnetic Brake
Speed Control Motors. Speed Control Motors. Brushless Motor's Structure and Principle of Operation H-40. Structure of Brushless Motor
 Speed Control Speed Control Brushless Motor's Structure and Principle of Operation Structure of Brushless Motor Ball Bearing Shaft Brushless motors have built-in magnetic component or optical encoder for
Speed Control Speed Control Brushless Motor's Structure and Principle of Operation Structure of Brushless Motor Ball Bearing Shaft Brushless motors have built-in magnetic component or optical encoder for
Application Note AN-SERV-006
 THIS INFORMATION PROVIDED BY AUTOMATIONDIRECT.COM TECHNICAL SUPPORT IS SUPPLIED "AS IS", WITHOUT ANY GUARANTEE OF ANY KIND. These documents are provided by our technical support department to assist others.
THIS INFORMATION PROVIDED BY AUTOMATIONDIRECT.COM TECHNICAL SUPPORT IS SUPPLIED "AS IS", WITHOUT ANY GUARANTEE OF ANY KIND. These documents are provided by our technical support department to assist others.
LINEAR MOTOR CONTROL IN ACTIVE SUSPENSION SYSTEMS
 LINEAR MOTOR CONTROL IN ACTIVE SUSPENSION SYSTEMS HONCŮ JAROSLAV, HYNIOVÁ KATEŘINA, STŘÍBRSKÝ ANTONÍN Department of Control Engineering, Faculty of Electrical Engineering, Czech Technical University Karlovo
LINEAR MOTOR CONTROL IN ACTIVE SUSPENSION SYSTEMS HONCŮ JAROSLAV, HYNIOVÁ KATEŘINA, STŘÍBRSKÝ ANTONÍN Department of Control Engineering, Faculty of Electrical Engineering, Czech Technical University Karlovo
TOYOTA ELECTRONIC CONTROL TRANSMISSION
 Electronic Control Transmission (ECT) The Electronic Control Transmission is an automatic transmission which uses modern electronic control technologies to control the transmission. The transmission itself,
Electronic Control Transmission (ECT) The Electronic Control Transmission is an automatic transmission which uses modern electronic control technologies to control the transmission. The transmission itself,
AC Servo Motors and Servo Rated Gearheads
 AC Servo Motors and Servo Rated Gearheads for the automation industry Courtesy of Steven Engineering, Inc.-23 Ryan Way, South San Francisco, CA 948-637-Main Office: (65) 588-92-Outside Local Area: (8)
AC Servo Motors and Servo Rated Gearheads for the automation industry Courtesy of Steven Engineering, Inc.-23 Ryan Way, South San Francisco, CA 948-637-Main Office: (65) 588-92-Outside Local Area: (8)
Synchronous motor. Type. Non-excited motors
 Synchronous motor A synchronous electric motor is an AC motor in which the rotation rate of the shaft is synchronized with the frequency of the AC supply current; the rotation period is exactly equal to
Synchronous motor A synchronous electric motor is an AC motor in which the rotation rate of the shaft is synchronized with the frequency of the AC supply current; the rotation period is exactly equal to
All round in Motion Control Rotating, linear and combinations of both! know-how makes the difference
 All round in Motion Control Rotating, linear and combinations of both! know-how makes the difference How state-of-the-art are your drive solutions? As a manufacturer you face complex challenges. The world
All round in Motion Control Rotating, linear and combinations of both! know-how makes the difference How state-of-the-art are your drive solutions? As a manufacturer you face complex challenges. The world
GT Sensors Precision Gear Tooth and Encoder Sensors
 GT Sensors Precision Gear Tooth and Encoder Sensors NVE s GT Sensor products are based on a Low Hysteresis GMR sensor material and are designed for use in industrial speed applications where magnetic detection
GT Sensors Precision Gear Tooth and Encoder Sensors NVE s GT Sensor products are based on a Low Hysteresis GMR sensor material and are designed for use in industrial speed applications where magnetic detection
Gear Trains. Introduction:
 Gear Trains Introduction: Sometimes, two or more gears are made to mesh with each other to transmit power from one shaft to another. Such a combination is called gear train or train of toothed wheels.
Gear Trains Introduction: Sometimes, two or more gears are made to mesh with each other to transmit power from one shaft to another. Such a combination is called gear train or train of toothed wheels.
Servo Motors (SensorDAQ only) Evaluation copy. Vernier Digital Control Unit (DCU) LabQuest or LabPro power supply
 Evaluation copy. Vernier Digital Control Unit (DCU) LabQuest or LabPro power supply") Servo Motors (SensorDAQ only) Project 7 Servos are small, relatively inexpensive motors known for their ability to provide a large torque or turning force. They draw current proportional to the mechanical
Servo Motors (SensorDAQ only) Project 7 Servos are small, relatively inexpensive motors known for their ability to provide a large torque or turning force. They draw current proportional to the mechanical
Rotating Machinery Diagnostics & Instrumentation Solutions for Maintenance That Matters www.mbesi.com
 13 Aberdeen Way Elgin, SC 29045 Cell (803) 427-0791 VFD Fundamentals & Troubleshooting 19-Feb-2010 By: Timothy S. Irwin, P.E. Sr. Engineer tsi@mbesi.com Rotating Machinery Diagnostics & Instrumentation
13 Aberdeen Way Elgin, SC 29045 Cell (803) 427-0791 VFD Fundamentals & Troubleshooting 19-Feb-2010 By: Timothy S. Irwin, P.E. Sr. Engineer tsi@mbesi.com Rotating Machinery Diagnostics & Instrumentation
Equipment: Power Supply, DAI, Synchronous motor (8241), Electrodynamometer (8960), Tachometer, Timing belt.
, Electrodynamometer (8960), Tachometer, Timing belt.") Lab 9: Synchronous motor. Objective: to examine the design of a 3-phase synchronous motor; to learn how to connect it; to obtain its starting characteristic; to determine the full-load characteristic of
Lab 9: Synchronous motor. Objective: to examine the design of a 3-phase synchronous motor; to learn how to connect it; to obtain its starting characteristic; to determine the full-load characteristic of
1.9" (48mm) Slotless Brushless DC motor.
 Slotless Brushless DC motor.") 1.9" (48mm) Slotless Brushless DC motor. 24V windings Sensorless Up to 200,000 rpm Maximum continuous power to 60 watts Slotless design is cog free, and provides high efficiency, with cool and quiet operation
1.9" (48mm) Slotless Brushless DC motor. 24V windings Sensorless Up to 200,000 rpm Maximum continuous power to 60 watts Slotless design is cog free, and provides high efficiency, with cool and quiet operation
ENERGY TRANSFER SYSTEMS AND THEIR DYNAMIC ANALYSIS
 ENERGY TRANSFER SYSTEMS AND THEIR DYNAMIC ANALYSIS Many mechanical energy systems are devoted to transfer of energy between two points: the source or prime mover (input) and the load (output). For chemical
ENERGY TRANSFER SYSTEMS AND THEIR DYNAMIC ANALYSIS Many mechanical energy systems are devoted to transfer of energy between two points: the source or prime mover (input) and the load (output). For chemical
ServoOne. Specification. Option 2 - Technology. x 11. x 8 X 8. x 10. x 9. x 7. x 6 TTL Encoder / TTL Encoder simulation
 x - + - + x L L L AC SO 4-45 A DC SO 4- A ServoOne Specification x 9 - + - + x 7 x 8 X 8 Option - Technology x 6 TTL Encoder / TTL Encoder simulation Specification ServoOne Specification Option - Technology
x - + - + x L L L AC SO 4-45 A DC SO 4- A ServoOne Specification x 9 - + - + x 7 x 8 X 8 Option - Technology x 6 TTL Encoder / TTL Encoder simulation Specification ServoOne Specification Option - Technology
LINEAR ACTUATORS. Linear Actuators. Linear Actuators. Linear Actuators are Actuators that creates motion in a straight line, as contrasted
 LINEAR ACTUATORS Linear Actuators Linear Actuators Linear Actuators are Actuators that creates motion in a straight line, as contrasted with circular motion of a conventional electric motor. Linear actuators
LINEAR ACTUATORS Linear Actuators Linear Actuators Linear Actuators are Actuators that creates motion in a straight line, as contrasted with circular motion of a conventional electric motor. Linear actuators
Small Coreless DC Motors
 CL Series 3 to 25 W Coreless DC Motors Smooth-running, optimized-performance coreless DC motors Small Coreless DC Motors Allied Motion s CL series of small coreless DC motors provides maximized performance
CL Series 3 to 25 W Coreless DC Motors Smooth-running, optimized-performance coreless DC motors Small Coreless DC Motors Allied Motion s CL series of small coreless DC motors provides maximized performance
Michelin North America
 www.centecinc.com SC Telephone: 864.527.7750 Outside SC: 800.227.0855 Michelin North America Industrial Maintenance Technical Interview Outline Industrial Maintenance Technical Interview Outline The Technical
www.centecinc.com SC Telephone: 864.527.7750 Outside SC: 800.227.0855 Michelin North America Industrial Maintenance Technical Interview Outline Industrial Maintenance Technical Interview Outline The Technical
S & P COIL PRODUCTS LTD SPC HOUSE, EVINGTON VALLEY ROAD, LEICESTER. LE5 5LU. Electrical layouts for EC Motors in Fan Convector units
 S & P COI PRODUCTS TD SPC HOUSE, EVIGTO VAEY ROAD, EICESTER. E5 5U Guidance Document Electrical layouts for EC Motors in Fan Convector units Hasnain Merchant Richard Meskimmon 4/9/0 This document is intended
S & P COI PRODUCTS TD SPC HOUSE, EVIGTO VAEY ROAD, EICESTER. E5 5U Guidance Document Electrical layouts for EC Motors in Fan Convector units Hasnain Merchant Richard Meskimmon 4/9/0 This document is intended
UNIT 3 AUTOMOBILE ELECTRICAL SYSTEMS
 UNIT 3 AUTOMOBILE ELECTRICAL SYSTEMS Automobile Electrical Structure 3.1 Introduction Objectives 3.2 Ignition System 3.3 Requirement of an Ignition System 3.4 Types of Ignition 3.4.1 Battery or Coil Ignition
UNIT 3 AUTOMOBILE ELECTRICAL SYSTEMS Automobile Electrical Structure 3.1 Introduction Objectives 3.2 Ignition System 3.3 Requirement of an Ignition System 3.4 Types of Ignition 3.4.1 Battery or Coil Ignition
Pulse Width Modulated (PWM)
") Control Technologies Manual PWM AC Drives Revision 1.0 Pulse Width Modulated (PWM) Figure 1.8 shows a block diagram of the power conversion unit in a PWM drive. In this type of drive, a diode bridge rectifier
Control Technologies Manual PWM AC Drives Revision 1.0 Pulse Width Modulated (PWM) Figure 1.8 shows a block diagram of the power conversion unit in a PWM drive. In this type of drive, a diode bridge rectifier
Servo Motor Selection Flow Chart
 Servo otor Selection Flow Chart START Selection Has the machine Been Selected? YES NO Explanation References etermine the size, mass, coefficient of friction, and external forces of all the moving part
Servo otor Selection Flow Chart START Selection Has the machine Been Selected? YES NO Explanation References etermine the size, mass, coefficient of friction, and external forces of all the moving part
Understanding the Alternator
 http://www.autoshop101.com THIS AUTOMOTIVE SERIES ON ALTERNATORS HAS BEEN DEVELOPED BY KEVIN R. SULLIVAN PROFESSOR OF AUTOMOTIVE TECHNOLOGY AT SKYLINE COLLEGE SAN BRUNO, CALIFORNIA ALL RIGHTS RESERVED
http://www.autoshop101.com THIS AUTOMOTIVE SERIES ON ALTERNATORS HAS BEEN DEVELOPED BY KEVIN R. SULLIVAN PROFESSOR OF AUTOMOTIVE TECHNOLOGY AT SKYLINE COLLEGE SAN BRUNO, CALIFORNIA ALL RIGHTS RESERVED
Technology Exploration-I
 Technology Exploration-I PREPARED BY Academic Services August 2011 Applied Technology High Schools, 2011 Module Objectives After the completion of this module, the student should be able to: Identify pulleys.
Technology Exploration-I PREPARED BY Academic Services August 2011 Applied Technology High Schools, 2011 Module Objectives After the completion of this module, the student should be able to: Identify pulleys.
SELECTION OF SERVO MOTORS AND DRIVES
 SELECTION OF SERVO MOTORS AND DRIVES Dal Y. Ohm, Drivetech, Inc. www.drivetechinc.com Abstract: The choice of motor and drive as well as mechanical transducer is a very important step in servo system design,
SELECTION OF SERVO MOTORS AND DRIVES Dal Y. Ohm, Drivetech, Inc. www.drivetechinc.com Abstract: The choice of motor and drive as well as mechanical transducer is a very important step in servo system design,
Experiment 8 : Pulse Width Modulation
 Name/NetID: Teammate/NetID: Experiment 8 : Pulse Width Modulation Laboratory Outline In experiment 5 we learned how to control the speed of a DC motor using a variable resistor. This week, we will learn
Name/NetID: Teammate/NetID: Experiment 8 : Pulse Width Modulation Laboratory Outline In experiment 5 we learned how to control the speed of a DC motor using a variable resistor. This week, we will learn