WISER 14. By the Robosses (Nila, Ishaa, Parvathi, Shivadharshne) National Public School, Bangalore, India And Vishnu Ram
|
|
|
- Arabella Carpenter
- 8 years ago
- Views:
Transcription


1 WISER 14 By the Robosses (Nila, Ishaa, Parvathi, Shivadharshne) National Public School, Bangalore, India And Vishnu Ram

2 Problem Statement What if a child could program a Robot? What if a programmer s imagination could be captured into the Robot Control? What if we could test the actions many times without effort before implementing the Robot? What if we could control the Robot using our Mobile? What if...?

3 Introduction Sensor inputs Program Control of the Robot involves the following parts: Inputs from the environment: Any robot will work in a specific environment Processing the information in the robot processor. e.g. programming of chip sets like Atmel processor. Dissemination of these commands to its various parts: This internal communication of messages to robot parts, for e.g. motors in arms or wheels. Control outputs Robot Actions

4 Existing Work in this Area Sensor based Robot Control LEGO Graphical User Interface Src: /06/cool-software-for-kids/ Line Following Algorithm Obstacle Avoidance Algorithm Integration using Preprogrammed/Preassembled components and control software.

5 Our Solution Our solution comprises of the following components: An animation-based mechanism to specify the actions of the robot. A sequence analyser software module which translates the animated steps to granular tasks. Distribution of these granular tasks to the robot using an android software module.

6 We propose 2 mechanisms to control the robot. A manual sequence of calibrated messages are sent from a GUI to the robot over bluetooth. This results in predetermined actions in the robot. Eg. Move, Turn, etc. Alice-based animation program [9] is used to represent an avatar of the robot and generate a sequence of procedures to control the robot. These are sent over Bluetooth to the robot which results in the robot mimicking corresponding actions of the avatar. An android program hosted on a Bluetooth capable mobile is used to send control messages to the robot
![Alice-based animation program [9] is used to represent an avatar of the robot and generate a sequence of procedures to control the robot.](/docs-images/43/4576615/images/page_6.jpg "These are sent over Bluetooth to the robot which results in the robot mimicking corresponding actions of the avatar.")
7 Implementation Creating Robot Control Specifications using Animation Use animation software Alice 3.1 to create virtual environments, actors and specify actions to them. The strip can be iteratively verified and tuned to adjust the actions and behavior of avatars which represent the robot.

8 Converting Animation Specifications to Control Commands In our approach, the animation software saves the animation sequence in an open format using Extended Markup Language We map these actions corresponding to the avatar into commands to the robot.

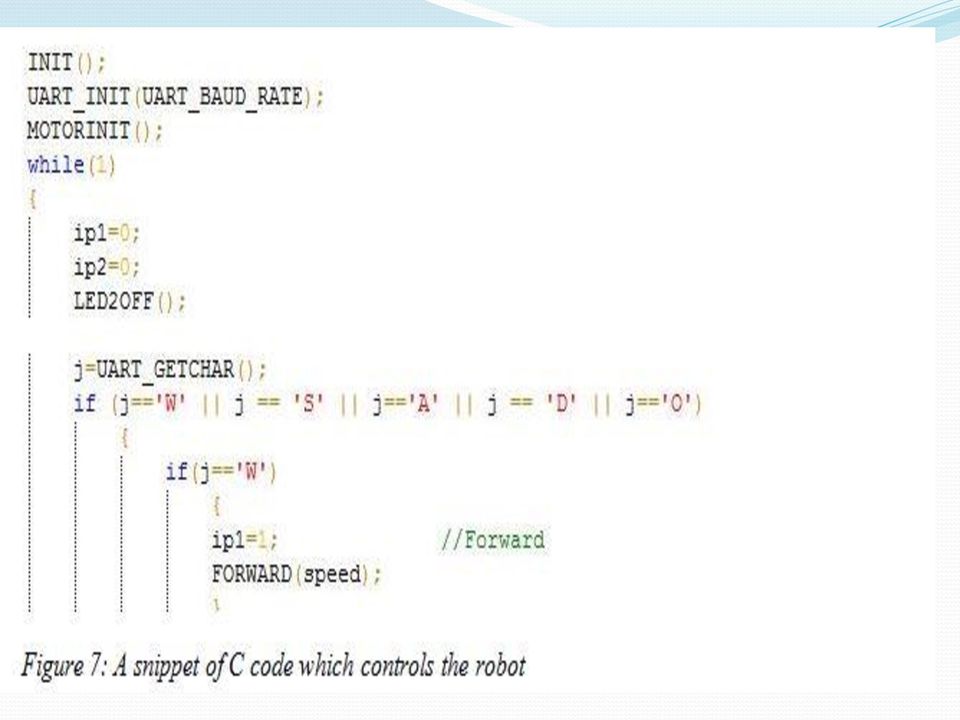
9 Distribution of Granular Tasks in Robot We use an android program running on the mobile to send the control commands mapped from the animation sequence to the robot. We use a Bluetooth interface to communicate between the android mobile and the robot. Our robot specifications are as below- Robot Controller Board with ATMEGA16 processor mounted on a Roundbot 2 Servo motors and Pan Tilt for arm movement 2 DC motors for lateral movement Bluetooth UART module USB-Bluetooth Servo Controller Board

10
11 The physical robot mimics the actions of the avatar Roger in animation.

12 Advantages Our approach has the following advantages: Use of Animation makes Robo programming fun! We use a wireless interface between the controller and the robot. Open source prototype and an open format for representing the granular tasks in the animation software makes it easier for us to extend and translate the actions. We can iteratively review and tune the robot actions without actually investing in building the robot. This we see as the biggest advantage and cost saving factor. Our intention by this project is to open up the world of robot programming to children like us who are good in art and animation and interested in robotics.

13 Conclusion Use of robots are becoming popular in many different domains. However, difficulty in programming robots is becoming a hurdle for children, robotics enthusiasts and other first-timers. In this paper, we presented three mechanisms to make their life easier. We proposed an animation based programming approach to control the robot, a Bluetooth- based wireless interface to control the robot and an android mobile to host the controller. We discussed the architecture of our solution, the details of our prototype implementation, and the advantages of our approach. Our future work includes a standard module for mapping animation to robot control. We intend to enhance our prototype to handle more representations and actions in the sequence analyser module, and control a group of robots. Please visit our demo tomorrow at the Junior Exhibition of Robofest

14 Acknowledgements We thank our parents, teachers and our coach for all the encouragement and support they gave us. We would also like to thank LTU for organising this WISER 2014 event and providing us with a platform to share our idea.

LEGO NXT-based Robotic Arm
 Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University barna.resko@arek.uni-obuda.hu, hamoriakos@gmail.com, polish1987@gmail.com
Óbuda University e Bulletin Vol. 2, No. 1, 2011 LEGO NXT-based Robotic Arm Ákos Hámori, János Lengyel, Barna Reskó Óbuda University barna.resko@arek.uni-obuda.hu, hamoriakos@gmail.com, polish1987@gmail.com
Hand Gestures Remote Controlled Robotic Arm
 Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 601-606 Research India Publications http://www.ripublication.com/aeee.htm Hand Gestures Remote Controlled
Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 601-606 Research India Publications http://www.ripublication.com/aeee.htm Hand Gestures Remote Controlled
Tutorial for Programming the LEGO MINDSTORMS NXT
 Tutorial for Programming the LEGO MINDSTORMS NXT Table of contents 1 LEGO MINDSTORMS Overview 2 Hardware 2.1 The NXT Brick 2.2 The Servo Motors 2.3 The Sensors 3 Software 3.1 Starting a Program 3.2 The
Tutorial for Programming the LEGO MINDSTORMS NXT Table of contents 1 LEGO MINDSTORMS Overview 2 Hardware 2.1 The NXT Brick 2.2 The Servo Motors 2.3 The Sensors 3 Software 3.1 Starting a Program 3.2 The
Best Robotics Sample Program Quick Start
 Best Robotics Sample Program Quick Start BEST Robotics Programming -- Sample Program Quick Start Page 1 Overview The documents describe the program "Best Competition Template.c" which contains the sample
Best Robotics Sample Program Quick Start BEST Robotics Programming -- Sample Program Quick Start Page 1 Overview The documents describe the program "Best Competition Template.c" which contains the sample
City of Dublin Education & Training Board. Programme Module for. Mobile Technologies. leading to. Level 6 FETAC. Mobile Technologies 6N0734
 City of Dublin Education & Training Board Programme Module for Mobile Technologies leading to Level 6 FETAC Version 3 1 Introduction This programme module may be delivered as a standalone module leading
City of Dublin Education & Training Board Programme Module for Mobile Technologies leading to Level 6 FETAC Version 3 1 Introduction This programme module may be delivered as a standalone module leading
Introduction to programming moway
 moway Contents Contents... 1 Introduction... 2 Flowcharts... 2 Movement blocks... 5 Conditionals... 6 Loops... 7 AND/OR Operators... 8 Setting flowcharts in order... 10 www.moway-robot.com 1 Introduction
moway Contents Contents... 1 Introduction... 2 Flowcharts... 2 Movement blocks... 5 Conditionals... 6 Loops... 7 AND/OR Operators... 8 Setting flowcharts in order... 10 www.moway-robot.com 1 Introduction
Next Gen Platform: Team & Mentor Guide
 Next Gen Platform: Team & Mentor Guide 1 Introduction For the 2015-2016 season, the FIRST Tech Challenge (FTC) will be adopting a new controller for its robot competitions. The new platform, which will
Next Gen Platform: Team & Mentor Guide 1 Introduction For the 2015-2016 season, the FIRST Tech Challenge (FTC) will be adopting a new controller for its robot competitions. The new platform, which will
Development of a Service Robot System for a Remote Child Monitoring Platform
 , pp.153-162 http://dx.doi.org/10.14257/ijsh.2014.8.5.14 Development of a Service Robot System for a Remote Child Monitoring Platform Taewoo Han 1 and Yong-Ho Seo 2, * 1 Department of Game and Multimedia,
, pp.153-162 http://dx.doi.org/10.14257/ijsh.2014.8.5.14 Development of a Service Robot System for a Remote Child Monitoring Platform Taewoo Han 1 and Yong-Ho Seo 2, * 1 Department of Game and Multimedia,
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF
 Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter (kucsera.peter@kvk.bmf.hu) Abstract In this article an autonomous advertising mobile robot that has been realized in
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter (kucsera.peter@kvk.bmf.hu) Abstract In this article an autonomous advertising mobile robot that has been realized in
KS3 Computing Group 1 Programme of Study 2015 2016 2 hours per week
 1 07/09/15 2 14/09/15 3 21/09/15 4 28/09/15 Communication and Networks esafety Obtains content from the World Wide Web using a web browser. Understands the importance of communicating safely and respectfully
1 07/09/15 2 14/09/15 3 21/09/15 4 28/09/15 Communication and Networks esafety Obtains content from the World Wide Web using a web browser. Understands the importance of communicating safely and respectfully
C.I. La chaîne d information LES CAPTEURS. Page 1 sur 5
 LES CAPTEURS C.I. La chaîne d information The Touch Sensor gives your robot a sense of touch. The Touch Sensor detects when it is being pressed by something and when it is released again. Suggestions for
LES CAPTEURS C.I. La chaîne d information The Touch Sensor gives your robot a sense of touch. The Touch Sensor detects when it is being pressed by something and when it is released again. Suggestions for
Project Development Plan
 Project Development Plan Roverwerx A.R.M. IRP Santa Clara University Richard Rasay 1 TABLE OF CONTENTS Introduction 1 Software Design.3 Robot-Side Application.5 Client-Side Application.7 Current Status
Project Development Plan Roverwerx A.R.M. IRP Santa Clara University Richard Rasay 1 TABLE OF CONTENTS Introduction 1 Software Design.3 Robot-Side Application.5 Client-Side Application.7 Current Status
Degree programme in Automation Engineering
 Degree programme in Automation Engineering Course descriptions of the courses for exchange students, 2014-2015 Autumn 2014 21727630 Application Programming Students know the basis of systems application
Degree programme in Automation Engineering Course descriptions of the courses for exchange students, 2014-2015 Autumn 2014 21727630 Application Programming Students know the basis of systems application
To introduce software process models To describe three generic process models and when they may be used
 Software Processes Objectives To introduce software process models To describe three generic process models and when they may be used To describe outline process models for requirements engineering, software
Software Processes Objectives To introduce software process models To describe three generic process models and when they may be used To describe outline process models for requirements engineering, software
Dr Robot C# Advance Sputnik Demo Program
 25 Valleywood Drive, Unit 20 Markham, Ontario, L3R 5L9, Canada Tel: (905) 943-9572 Fax: (905) 943-9197 Support@DrRobot.com Dr Robot C# Advance Sputnik Demo Program Version: 1.0.0 June 2008-1 - Copyright
25 Valleywood Drive, Unit 20 Markham, Ontario, L3R 5L9, Canada Tel: (905) 943-9572 Fax: (905) 943-9197 Support@DrRobot.com Dr Robot C# Advance Sputnik Demo Program Version: 1.0.0 June 2008-1 - Copyright
CS 3530 Operating Systems. L02 OS Intro Part 1 Dr. Ken Hoganson
 CS 3530 Operating Systems L02 OS Intro Part 1 Dr. Ken Hoganson Chapter 1 Basic Concepts of Operating Systems Computer Systems A computer system consists of two basic types of components: Hardware components,
CS 3530 Operating Systems L02 OS Intro Part 1 Dr. Ken Hoganson Chapter 1 Basic Concepts of Operating Systems Computer Systems A computer system consists of two basic types of components: Hardware components,
North Texas FLL Coaches' Clinics. Beginning Programming October 2014. Patrick R. Michaud pmichaud@pobox.com republicofpi.org
 North Texas FLL Coaches' Clinics Beginning Programming October 2014 Patrick R. Michaud pmichaud@pobox.com republicofpi.org Goals Learn basics of Mindstorms programming Be able to accomplish some missions
North Texas FLL Coaches' Clinics Beginning Programming October 2014 Patrick R. Michaud pmichaud@pobox.com republicofpi.org Goals Learn basics of Mindstorms programming Be able to accomplish some missions
Fig. 1 BAN Architecture III. ATMEL BOARD
 Volume 2, Issue 9, September 2014 ISSN: 2321 7782 (Online) International Journal of Advance Research in Computer Science and Management Studies Research Article / Survey Paper / Case Study Available online
Volume 2, Issue 9, September 2014 ISSN: 2321 7782 (Online) International Journal of Advance Research in Computer Science and Management Studies Research Article / Survey Paper / Case Study Available online
Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205]
![Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205]](/thumbs/40/21161302.jpg "Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205]") Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 Bluetooth + USB 16 Servo Controller is used to control up to
Bluetooth + USB 16 Servo Controller [RKI-1005 & RKI-1205] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 Bluetooth + USB 16 Servo Controller is used to control up to
GCE APPLIED ICT A2 COURSEWORK TIPS
 GCE APPLIED ICT A2 COURSEWORK TIPS COURSEWORK TIPS A2 GCE APPLIED ICT If you are studying for the six-unit GCE Single Award or the twelve-unit Double Award, then you may study some of the following coursework
GCE APPLIED ICT A2 COURSEWORK TIPS COURSEWORK TIPS A2 GCE APPLIED ICT If you are studying for the six-unit GCE Single Award or the twelve-unit Double Award, then you may study some of the following coursework
Pine Hill Public Schools Curriculum
 Pine Hill Public Schools Curriculum Content Area: Course Title/ Grade Level: Electives Robotics Unit 1: Safety and Classroom Procedures Duration: 1 Week Unit 2: Intro to Robotics Duration: 3 Weeks Unit
Pine Hill Public Schools Curriculum Content Area: Course Title/ Grade Level: Electives Robotics Unit 1: Safety and Classroom Procedures Duration: 1 Week Unit 2: Intro to Robotics Duration: 3 Weeks Unit
Microtronics technologies Mobile: 99707 90092
 For more Project details visit: http://www.projectsof8051.com/rfid-based-attendance-management-system/ Code Project Title 1500 RFid Based Attendance System Synopsis for RFid Based Attendance System 1.
For more Project details visit: http://www.projectsof8051.com/rfid-based-attendance-management-system/ Code Project Title 1500 RFid Based Attendance System Synopsis for RFid Based Attendance System 1.
Controlling a Mobile Robot with a Personal Digital Assistant
 Session 2620 Controlling a Mobile Robot with a Personal Digital Assistant Robert L. Avanzato Penn State Abington Abstract Penn State Abington has been exploring the application of personal digital assistant
Session 2620 Controlling a Mobile Robot with a Personal Digital Assistant Robert L. Avanzato Penn State Abington Abstract Penn State Abington has been exploring the application of personal digital assistant
Embedded Systems on ARM Cortex-M3 (4weeks/45hrs)
") Embedded Systems on ARM Cortex-M3 (4weeks/45hrs) Course & Kit Contents LEARN HOW TO: Use of Keil Real View for ARM Use ARM Cortex-M3 MCU for professional embedded application development Understanding
Embedded Systems on ARM Cortex-M3 (4weeks/45hrs) Course & Kit Contents LEARN HOW TO: Use of Keil Real View for ARM Use ARM Cortex-M3 MCU for professional embedded application development Understanding
2. Analysis, Design and Implementation
 2. Subject/Topic/Focus: Software Production Process Summary: Software Crisis Software as a Product: From Individual Programs to Complete Application Systems Software Development: Goals, Tasks, Actors,
2. Subject/Topic/Focus: Software Production Process Summary: Software Crisis Software as a Product: From Individual Programs to Complete Application Systems Software Development: Goals, Tasks, Actors,
West Windsor-Plainsboro Regional School District Computer Programming Grade 8
 West Windsor-Plainsboro Regional School District Computer Programming Grade 8 Unit 1: Programming Content Area: Technology Course & Grade Level: Computer Programming, Grade 8 Summary and Rationale The
West Windsor-Plainsboro Regional School District Computer Programming Grade 8 Unit 1: Programming Content Area: Technology Course & Grade Level: Computer Programming, Grade 8 Summary and Rationale The
Programming Logic controllers
 Programming Logic controllers Programmable Logic Controller (PLC) is a microprocessor based system that uses programmable memory to store instructions and implement functions such as logic, sequencing,
Programming Logic controllers Programmable Logic Controller (PLC) is a microprocessor based system that uses programmable memory to store instructions and implement functions such as logic, sequencing,
CS 389 Software Engineering. Lecture 2 Chapter 2 Software Processes. Adapted from: Chap 1. Sommerville 9 th ed. Chap 1. Pressman 6 th ed.
 CS 389 Software Engineering Lecture 2 Chapter 2 Software Processes Adapted from: Chap 1. Sommerville 9 th ed. Chap 1. Pressman 6 th ed. Topics covered Software process models Process activities Coping
CS 389 Software Engineering Lecture 2 Chapter 2 Software Processes Adapted from: Chap 1. Sommerville 9 th ed. Chap 1. Pressman 6 th ed. Topics covered Software process models Process activities Coping
INTELLIGENT HOME MONITORING AND WIRELESS CONTROL SYSTEM
 INTELLIGENT HOME MONITORING AND WIRELESS CONTROL SYSTEM Vishnu Prajapati 1,Shashank Gole 2,Prathamesh Deshpande 3 Siddhesh Wadekar 4, Prof. Shubhangi Wankhede 5 1,2,3,4,5 Department of Electronics and
INTELLIGENT HOME MONITORING AND WIRELESS CONTROL SYSTEM Vishnu Prajapati 1,Shashank Gole 2,Prathamesh Deshpande 3 Siddhesh Wadekar 4, Prof. Shubhangi Wankhede 5 1,2,3,4,5 Department of Electronics and
TETRIX Add-On Extensions. Encoder Programming Guide (ROBOTC )
") Introduction: In this extension, motor encoders will be added to the wheels of the Ranger Bot. The Ranger Bot with Encoders will be programmed to move forward until it detects an object, turn 90, and move
Introduction: In this extension, motor encoders will be added to the wheels of the Ranger Bot. The Ranger Bot with Encoders will be programmed to move forward until it detects an object, turn 90, and move
INTRODUCTION TO SERIAL ARM
 INTRODUCTION TO SERIAL ARM A robot manipulator consists of links connected by joints. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of
INTRODUCTION TO SERIAL ARM A robot manipulator consists of links connected by joints. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of
Servo Info and Centering
 Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
Info and Centering A servo is a mechanical motorized device that can be instructed to move the output shaft attached to a servo wheel or arm to a specified position. Inside the servo box is a DC motor
A 5 Degree Feedback Control Robotic Arm (Haptic Arm)
") A 5 Degree Feedback Control Robotic Arm (Haptic Arm) 1 Prof. Sheetal Nirve, 2 Mr.Abhilash Patil, 3 Mr.Shailesh Patil, 4 Mr.Vishal Raut Abstract: Haptics is the science of applying touch sensation and control
A 5 Degree Feedback Control Robotic Arm (Haptic Arm) 1 Prof. Sheetal Nirve, 2 Mr.Abhilash Patil, 3 Mr.Shailesh Patil, 4 Mr.Vishal Raut Abstract: Haptics is the science of applying touch sensation and control
Introduction to Simulink & Stateflow. Coorous Mohtadi
 Introduction to Simulink & Stateflow Coorous Mohtadi 1 Key Message Simulink and Stateflow provide: A powerful environment for modelling real processes... and are fully integrated with the MATLAB environment.
Introduction to Simulink & Stateflow Coorous Mohtadi 1 Key Message Simulink and Stateflow provide: A powerful environment for modelling real processes... and are fully integrated with the MATLAB environment.
2. Analysis, Design and Implementation
 2. Analysis, Design and Implementation Subject/Topic/Focus: Software Production Process Summary: Software Crisis Software as a Product: From Programs to Application Systems Products Software Development:
2. Analysis, Design and Implementation Subject/Topic/Focus: Software Production Process Summary: Software Crisis Software as a Product: From Programs to Application Systems Products Software Development:
EASTERN SCHOOL DISTRICT
 EASTERN SCHOOL DISTRICT Course Descriptor Summary (Interim September 2005) 1. Subject Area: Technology Education 2. Course: Computer Technology 3200 3. Program Description/Guiding Principles: TABLE OF
EASTERN SCHOOL DISTRICT Course Descriptor Summary (Interim September 2005) 1. Subject Area: Technology Education 2. Course: Computer Technology 3200 3. Program Description/Guiding Principles: TABLE OF
The NXT Generation. A complete learning solution
 The NXT Generation A complete learning solution The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts in
The NXT Generation A complete learning solution The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts in
ANDROID LEVERED DATA MONITORING ROBOT
 ANDROID LEVERED DATA MONITORING ROBOT 1 HIMANI PATHAK, 2 VIDYALAKSHMI KRISHNAKUMAR, 3 SHILPA RAVIKUMAR, 4 AJINKYA SHINDE 1,2,3,4 Electronics & Telecommunication Engineering, Fr. C. R. Institute of Technology,
ANDROID LEVERED DATA MONITORING ROBOT 1 HIMANI PATHAK, 2 VIDYALAKSHMI KRISHNAKUMAR, 3 SHILPA RAVIKUMAR, 4 AJINKYA SHINDE 1,2,3,4 Electronics & Telecommunication Engineering, Fr. C. R. Institute of Technology,
How To Teach Robotics In An Engineering Course
 PROPOSAL for Innovative Instructional Technology Faculty Grant Development of Academic Course to be Offered On- and Off-Campus Via the New Technology Applications must be received by 1 November 2004 I.
PROPOSAL for Innovative Instructional Technology Faculty Grant Development of Academic Course to be Offered On- and Off-Campus Via the New Technology Applications must be received by 1 November 2004 I.
EasyC. Programming Tips
 EasyC Programming Tips PART 1: EASYC PROGRAMMING ENVIRONMENT The EasyC package is an integrated development environment for creating C Programs and loading them to run on the Vex Control System. Its Opening
EasyC Programming Tips PART 1: EASYC PROGRAMMING ENVIRONMENT The EasyC package is an integrated development environment for creating C Programs and loading them to run on the Vex Control System. Its Opening
MECE 102 Mechatronics Engineering Orientation
 MECE 102 Mechatronics Engineering Orientation Mechatronic System Components Associate Prof. Dr. of Mechatronics Engineering Çankaya University Compulsory Course in Mechatronics Engineering Credits (2/0/2)
MECE 102 Mechatronics Engineering Orientation Mechatronic System Components Associate Prof. Dr. of Mechatronics Engineering Çankaya University Compulsory Course in Mechatronics Engineering Credits (2/0/2)
Android, Bluetooth and MIAC
 Android, Bluetooth and MIAC by Ben Rowland, June 2012 Abstract Discover how easy it is to use TCP network communications to link together high level systems. This article demonstrates techniques to pass
Android, Bluetooth and MIAC by Ben Rowland, June 2012 Abstract Discover how easy it is to use TCP network communications to link together high level systems. This article demonstrates techniques to pass
DROFLY PRO V3 User Guide
 DROFLY PRO V3 User Guide 1/17 Table Of Contents 1/ INTRODUCTION 1.1/ Presentation 1.2/ Changes 2/ HARDWARE SETUP 2.1/ Setup on your frame 2.2/Connecting Flight Controller a. To BEC b. To Receiver c. To
DROFLY PRO V3 User Guide 1/17 Table Of Contents 1/ INTRODUCTION 1.1/ Presentation 1.2/ Changes 2/ HARDWARE SETUP 2.1/ Setup on your frame 2.2/Connecting Flight Controller a. To BEC b. To Receiver c. To
Your EdVenture into Robotics You re a Programmer
 Your EdVenture into Robotics You re a Programmer Introduction... 3 Getting started... 4 Meet EdWare... 8 EdWare icons... 9 EdVenture 1- Flash a LED... 10 EdVenture 2 Beep!! Beep!!... 12 EdVenture 3 Robots
Your EdVenture into Robotics You re a Programmer Introduction... 3 Getting started... 4 Meet EdWare... 8 EdWare icons... 9 EdVenture 1- Flash a LED... 10 EdVenture 2 Beep!! Beep!!... 12 EdVenture 3 Robots
Android based Secured Vehicle Key Finder System
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Android based Secured Vehicle Key Finder System Sindhoori S. 1, Dr. N. Sathish Kumar 2 *(M.E. Embedded System Technologies, Sri
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Android based Secured Vehicle Key Finder System Sindhoori S. 1, Dr. N. Sathish Kumar 2 *(M.E. Embedded System Technologies, Sri
Software Engineering. Software Processes. Based on Software Engineering, 7 th Edition by Ian Sommerville
 Software Engineering Software Processes Based on Software Engineering, 7 th Edition by Ian Sommerville Objectives To introduce software process models To describe three generic process models and when
Software Engineering Software Processes Based on Software Engineering, 7 th Edition by Ian Sommerville Objectives To introduce software process models To describe three generic process models and when
Infrared Sensor. Color Sensor. Touch Sensor. Programmable brick. 3 Interactive Servo Motors. Makes your robot see. Makes. your robot.
 Infrared Sensor Makes your robot see Touch Sensor Makes your robot feel Color Sensor Makes your robot recognize colors Programmable brick The brain and voice of your robot 3 Interactive Servo Motors Make
Infrared Sensor Makes your robot see Touch Sensor Makes your robot feel Color Sensor Makes your robot recognize colors Programmable brick The brain and voice of your robot 3 Interactive Servo Motors Make
Cypress Semiconductor: Arduino Friendly PSoC Shield
 Cypress Semiconductor: Arduino Friendly PSoC Shield Design Presentation ECE 480 Design Team 1 Cecilia Acosta Brett Donlon Matt Durak Aaron Thompson Nathan Ward Faculty Facilitator Dr. Robert McGough Sponsor
Cypress Semiconductor: Arduino Friendly PSoC Shield Design Presentation ECE 480 Design Team 1 Cecilia Acosta Brett Donlon Matt Durak Aaron Thompson Nathan Ward Faculty Facilitator Dr. Robert McGough Sponsor
Networking Remote-Controlled Moving Image Monitoring System
 Networking Remote-Controlled Moving Image Monitoring System First Prize Networking Remote-Controlled Moving Image Monitoring System Institution: Participants: Instructor: National Chung Hsing University
Networking Remote-Controlled Moving Image Monitoring System First Prize Networking Remote-Controlled Moving Image Monitoring System Institution: Participants: Instructor: National Chung Hsing University
Nagpur, Maharashtra, India
 Volume 6, Issue 2, February 2016 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Automated Door
Volume 6, Issue 2, February 2016 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Automated Door
LEARNING MOBILE ROBOTICS USING LEGO MINDSTORMS
 LEARNING MOBILE ROBOTICS USING LEGO MINDSTORMS Paulo Leitão, José Gonçalves, José Barbosa Polytechnic Institute of Bragança, Department of Electrical Engineering, Quinta Santa Apolónia, Apartado 1134,P-5301-857
LEARNING MOBILE ROBOTICS USING LEGO MINDSTORMS Paulo Leitão, José Gonçalves, José Barbosa Polytechnic Institute of Bragança, Department of Electrical Engineering, Quinta Santa Apolónia, Apartado 1134,P-5301-857
Access Control Using Smartcard And Passcode
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676 Volume 4, Issue 5 (Jan. - Feb. 2013), PP 29-34 Access Control Using Smartcard And Passcode Omorogiuwa Eseosa 1., Uhunmwangho
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676 Volume 4, Issue 5 (Jan. - Feb. 2013), PP 29-34 Access Control Using Smartcard And Passcode Omorogiuwa Eseosa 1., Uhunmwangho
Lab 3 Microcontroller programming Interfacing to Sensors and Actuators with irobot
 1. Objective Lab 3 Microcontroller programming Interfacing to Sensors and Actuators with irobot In this lab, you will: i. Become familiar with the irobot and AVR tools. ii. Understand how to program a
1. Objective Lab 3 Microcontroller programming Interfacing to Sensors and Actuators with irobot In this lab, you will: i. Become familiar with the irobot and AVR tools. ii. Understand how to program a
Six-servo Robot Arm. DAGU Hi-Tech Electronic Co., LTD www.arexx.com.cn. Six-servo Robot Arm
 Six-servo Robot Arm 1 1, Introduction 1.1, Function Briefing Servo robot, as the name suggests, is the six servo motor-driven robot arm. Since the arm has a few joints, we can imagine, our human arm, in
Six-servo Robot Arm 1 1, Introduction 1.1, Function Briefing Servo robot, as the name suggests, is the six servo motor-driven robot arm. Since the arm has a few joints, we can imagine, our human arm, in
Praktikum "Mobile Roboter" mit Simulation und Telerobotik-Zugang (TELEBOTS)
") Praktikum "Mobile Roboter" mit Simulation und Telerobotik-Zugang (TELEBOTS) Universität Hamburg Fachbereich Informatik, Arbeitsbereich TAMS Dr. Houxiang Zhang, Dipl.-Inform. Tim Baier, Weining Zheng Zwischenbericht
Praktikum "Mobile Roboter" mit Simulation und Telerobotik-Zugang (TELEBOTS) Universität Hamburg Fachbereich Informatik, Arbeitsbereich TAMS Dr. Houxiang Zhang, Dipl.-Inform. Tim Baier, Weining Zheng Zwischenbericht
Your EdVenture into Robotics You re a Programmer
 Your EdVenture into Robotics You re a Programmer meetedison.com Contents Introduction... 3 Getting started... 4 Meet EdWare... 8 EdWare icons... 9 EdVenture 1- Flash a LED... 10 EdVenture 2 Beep!! Beep!!...
Your EdVenture into Robotics You re a Programmer meetedison.com Contents Introduction... 3 Getting started... 4 Meet EdWare... 8 EdWare icons... 9 EdVenture 1- Flash a LED... 10 EdVenture 2 Beep!! Beep!!...
ECE 491 SENIOR PROJECT I MINI SUMO ROBOT
 ECE 491 SENIOR PROJECT I MINI SUMO ROBOT STUDENTS EMRAH ÇAĞLAR CİHAN ARDA Supervisor: Assist. PROF. DR. ORHAN GAZİ 1 DIGITEST ELECTRONICS LTD COMPANY(established in 2002) Main purpose of the company is
ECE 491 SENIOR PROJECT I MINI SUMO ROBOT STUDENTS EMRAH ÇAĞLAR CİHAN ARDA Supervisor: Assist. PROF. DR. ORHAN GAZİ 1 DIGITEST ELECTRONICS LTD COMPANY(established in 2002) Main purpose of the company is
PID Control. Proportional Integral Derivative (PID) Control. Matrix Multimedia 2011 MX009 - PID Control. by Ben Rowland, April 2011
 Control. Matrix Multimedia 2011 MX009 - PID Control. by Ben Rowland, April 2011") PID Control by Ben Rowland, April 2011 Abstract PID control is used extensively in industry to control machinery and maintain working environments etc. The fundamentals of PID control are fairly straightforward
PID Control by Ben Rowland, April 2011 Abstract PID control is used extensively in industry to control machinery and maintain working environments etc. The fundamentals of PID control are fairly straightforward
Microcontroller Programming Beginning with Arduino. Charlie Mooney
 Microcontroller Programming Beginning with Arduino Charlie Mooney Microcontrollers Tiny, self contained computers in an IC Often contain peripherals Different packages availible Vast array of size and
Microcontroller Programming Beginning with Arduino Charlie Mooney Microcontrollers Tiny, self contained computers in an IC Often contain peripherals Different packages availible Vast array of size and
Windows Presentation Foundation (WPF)
") 50151 - Version: 4 05 July 2016 Windows Presentation Foundation (WPF) Windows Presentation Foundation (WPF) 50151 - Version: 4 5 days Course Description: This five-day instructor-led course provides students
50151 - Version: 4 05 July 2016 Windows Presentation Foundation (WPF) Windows Presentation Foundation (WPF) 50151 - Version: 4 5 days Course Description: This five-day instructor-led course provides students
Keywords drowsiness, image processing, ultrasonic sensor, detection, camera, speed.
 EYE TRACKING BASED DRIVER DROWSINESS MONITORING AND WARNING SYSTEM Mitharwal Surendra Singh L., Ajgar Bhavana G., Shinde Pooja S., Maske Ashish M. Department of Electronics and Telecommunication Institute
EYE TRACKING BASED DRIVER DROWSINESS MONITORING AND WARNING SYSTEM Mitharwal Surendra Singh L., Ajgar Bhavana G., Shinde Pooja S., Maske Ashish M. Department of Electronics and Telecommunication Institute
Embedded Software Development with MPS
 Embedded Software Development with MPS Markus Voelter independent/itemis The Limitations of C and Modeling Tools Embedded software is usually implemented in C. The language is relatively close to the hardware,
Embedded Software Development with MPS Markus Voelter independent/itemis The Limitations of C and Modeling Tools Embedded software is usually implemented in C. The language is relatively close to the hardware,
Courses Descriptions for BS.c. MIS Program. Main Major Courses (Bachelor Degree in Management Information System)
") Courses Descriptions for BS.c. MIS Program Main Major Courses (Bachelor Degree in Management Information System) 1. Management Information Systems / MIS211(3 Crh.) pre. CS104+BA108. This course introduces
Courses Descriptions for BS.c. MIS Program Main Major Courses (Bachelor Degree in Management Information System) 1. Management Information Systems / MIS211(3 Crh.) pre. CS104+BA108. This course introduces
Two hours UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE. M.Sc. in Advanced Computer Science. Friday 18 th January 2008.
 COMP60321 Two hours UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE M.Sc. in Advanced Computer Science Computer Animation Friday 18 th January 2008 Time: 09:45 11:45 Please answer any THREE Questions
COMP60321 Two hours UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE M.Sc. in Advanced Computer Science Computer Animation Friday 18 th January 2008 Time: 09:45 11:45 Please answer any THREE Questions
A Surveillance Robot with Climbing Capabilities for Home Security
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 2, Issue. 11, November 2013,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 2, Issue. 11, November 2013,
Computer Automation Techniques. Arthur Carroll
 Computer Automation Techniques Arthur Carroll 1 Three Types of Computers Micro-Controller Single Board Computer Desktop Computer 2 The Micro-Controller Small inexpensive DIP or surface mount chips Roughly
Computer Automation Techniques Arthur Carroll 1 Three Types of Computers Micro-Controller Single Board Computer Desktop Computer 2 The Micro-Controller Small inexpensive DIP or surface mount chips Roughly
2. Select the hardware that you will use as well as the programming language that will be appropriate with the students that you teach.
 Steps to starting a LEGO robotics program Congratulations on your decision to start a robotics program! Whether you are a teacher, parent, coach, or an afterschool club leader, you ll find lots of support
Steps to starting a LEGO robotics program Congratulations on your decision to start a robotics program! Whether you are a teacher, parent, coach, or an afterschool club leader, you ll find lots of support
AQA GCSE in Computer Science Computer Science Microsoft IT Academy Mapping
 AQA GCSE in Computer Science Computer Science Microsoft IT Academy Mapping 3.1.1 Constants, variables and data types Understand what is mean by terms data and information Be able to describe the difference
AQA GCSE in Computer Science Computer Science Microsoft IT Academy Mapping 3.1.1 Constants, variables and data types Understand what is mean by terms data and information Be able to describe the difference
Living Requirements Document: Sniffit
 Living Requirements Document: Sniffit RFID locator system Andrew Pang Braulio Fonseca Enrique Gutierrez Nader Khalil Sohan Shah Victor Porter Introduction Sniffit is a handy tracking application that helps
Living Requirements Document: Sniffit RFID locator system Andrew Pang Braulio Fonseca Enrique Gutierrez Nader Khalil Sohan Shah Victor Porter Introduction Sniffit is a handy tracking application that helps
Silabs Ember Development Tools
 Silabs Ember Development Tools Presented by Silicon Laboratories Shaoxian Luo 1 Development Tools Desktop Network Analyzer Debug Adapter Packet Trace Port Desktop Network Analyzer provides a macroscopic
Silabs Ember Development Tools Presented by Silicon Laboratories Shaoxian Luo 1 Development Tools Desktop Network Analyzer Debug Adapter Packet Trace Port Desktop Network Analyzer provides a macroscopic
Robotic Home Assistant Care-O-bot: Past Present Future
 Robotic Home Assistant Care-O-bot: Past Present Future M. Hans, B. Graf, R.D. Schraft Fraunhofer Institute for Manufacturing Engineering and Automation (IPA) Nobelstr. 12, Stuttgart, Germany E-mail: {hans,
Robotic Home Assistant Care-O-bot: Past Present Future M. Hans, B. Graf, R.D. Schraft Fraunhofer Institute for Manufacturing Engineering and Automation (IPA) Nobelstr. 12, Stuttgart, Germany E-mail: {hans,
SkyveBOTICS. A two days workshop on VoIP Controlled & Intelligent Robotics
 SkyveBOTICS A two days workshop on VoIP Controlled & Intelligent Robotics Zonal Center Hosting Proposal Participants will be awarded Certificate of Participation from EISystems Dear Sir/Madam This is to
SkyveBOTICS A two days workshop on VoIP Controlled & Intelligent Robotics Zonal Center Hosting Proposal Participants will be awarded Certificate of Participation from EISystems Dear Sir/Madam This is to
Chapter 13: Program Development and Programming Languages
 Understanding Computers Today and Tomorrow 12 th Edition Chapter 13: Program Development and Programming Languages Learning Objectives Understand the differences between structured programming, object-oriented
Understanding Computers Today and Tomorrow 12 th Edition Chapter 13: Program Development and Programming Languages Learning Objectives Understand the differences between structured programming, object-oriented
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
Introduction to System-on-Chip Design
 NATIONAL KAOHSIUNG FIRST UNIVERSITY OF SCIENCE AND TECHNOLOGY Introduction to System-on-Chip Design Image compression with MCU Group 5 Professor: 陳 朝 烈 Administrator: 蔡 乙 銘 Members: 吳 柏 萱, 張 凱 傑, 孫 志 光
NATIONAL KAOHSIUNG FIRST UNIVERSITY OF SCIENCE AND TECHNOLOGY Introduction to System-on-Chip Design Image compression with MCU Group 5 Professor: 陳 朝 烈 Administrator: 蔡 乙 銘 Members: 吳 柏 萱, 張 凱 傑, 孫 志 光
Computer Integrated Manufacturing Course Description
 Computer Integrated Manufacturing Course Description Computer Integrated Manufacturing (CIM) is the study of manufacturing planning, integration, and implementation of automation. The course explores manufacturing
Computer Integrated Manufacturing Course Description Computer Integrated Manufacturing (CIM) is the study of manufacturing planning, integration, and implementation of automation. The course explores manufacturing
Designing and Embodiment of Software that Creates Middle Ware for Resource Management in Embedded System
 , pp.97-108 http://dx.doi.org/10.14257/ijseia.2014.8.6.08 Designing and Embodiment of Software that Creates Middle Ware for Resource Management in Embedded System Suk Hwan Moon and Cheol sick Lee Department
, pp.97-108 http://dx.doi.org/10.14257/ijseia.2014.8.6.08 Designing and Embodiment of Software that Creates Middle Ware for Resource Management in Embedded System Suk Hwan Moon and Cheol sick Lee Department
GSM Based Home Automation, Safety and Security System Using Android Mobile Phone
 GSM Based Home Automation, Safety and Security System Using Android Mobile Phone Akanksha Singh (Student) Arijit Pal (Student) Bijay Rai (Assistant Professor) Department Of Electrical & Electronics Department
GSM Based Home Automation, Safety and Security System Using Android Mobile Phone Akanksha Singh (Student) Arijit Pal (Student) Bijay Rai (Assistant Professor) Department Of Electrical & Electronics Department
dspace DSP DS-1104 based State Observer Design for Position Control of DC Servo Motor
 dspace DSP DS-1104 based State Observer Design for Position Control of DC Servo Motor Jaswandi Sawant, Divyesh Ginoya Department of Instrumentation and control, College of Engineering, Pune. ABSTRACT This
dspace DSP DS-1104 based State Observer Design for Position Control of DC Servo Motor Jaswandi Sawant, Divyesh Ginoya Department of Instrumentation and control, College of Engineering, Pune. ABSTRACT This
Internet based manipulator telepresence
 Internet based manipulator telepresence T ten Kate, P Zizola, B Driessen, K van Woerden TNO Institute of Applied Physics, Stieltjesweg 1, 2628 CK DELFT, The NETHERLANDS {tenkate, zizola, driessen, vwoerden}@tpd.tno.nl
Internet based manipulator telepresence T ten Kate, P Zizola, B Driessen, K van Woerden TNO Institute of Applied Physics, Stieltjesweg 1, 2628 CK DELFT, The NETHERLANDS {tenkate, zizola, driessen, vwoerden}@tpd.tno.nl
Software Engineering. Software Development Process Models. Lecturer: Giuseppe Santucci
 Software Engineering Software Development Process Models Lecturer: Giuseppe Santucci Summary Modeling the Software Process Generic Software Process Models Waterfall model Process Iteration Incremental
Software Engineering Software Development Process Models Lecturer: Giuseppe Santucci Summary Modeling the Software Process Generic Software Process Models Waterfall model Process Iteration Incremental
2/26/2008. Sensors For Robotics. What is sensing? Why do robots need sensors? What is the angle of my arm? internal information
 Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Hazlet Township Public Schools
 Hazlet Township Public Schools COURSE OF STUDY FOR Computer Construction II and Robotics June 2009 Nicholas Formica UNIT NUMBER AND TITLE: 1, Introduction and initial configuration BRIEF SUMMARY OF UNIT:
Hazlet Township Public Schools COURSE OF STUDY FOR Computer Construction II and Robotics June 2009 Nicholas Formica UNIT NUMBER AND TITLE: 1, Introduction and initial configuration BRIEF SUMMARY OF UNIT:
Bluetooth HID Profile
 RN-WIFLYCR-UM-.01 RN-HID-UM Bluetooth HID Profile 2012 Roving Networks. All rights reserved. Version 1.0r 1/17/2012 USER MANUAL www.rovingnetworks.com 1 OVERVIEW Roving Networks Bluetooth modules support
RN-WIFLYCR-UM-.01 RN-HID-UM Bluetooth HID Profile 2012 Roving Networks. All rights reserved. Version 1.0r 1/17/2012 USER MANUAL www.rovingnetworks.com 1 OVERVIEW Roving Networks Bluetooth modules support
Computer and Set of Robots
 Lesson 11:DESIGN PROCESS EXAMPLES Mobile-Phone, Mobile- Computer and Set of Robots 1 Mobile Phone 2 Mobile phone SoC (System-on-Chip) Hardware units Microcontroller or ASIP (Application Specific Instruction
Lesson 11:DESIGN PROCESS EXAMPLES Mobile-Phone, Mobile- Computer and Set of Robots 1 Mobile Phone 2 Mobile phone SoC (System-on-Chip) Hardware units Microcontroller or ASIP (Application Specific Instruction
Sensor-Based Robotic Model for Vehicle Accident Avoidance
 Copyright 2012 American Scientific Publishers All rights reserved Printed in the United States of America Journal of Computational Intelligence and Electronic Systems Vol. 1, 1 6, 2012 Sensor-Based Robotic
Copyright 2012 American Scientific Publishers All rights reserved Printed in the United States of America Journal of Computational Intelligence and Electronic Systems Vol. 1, 1 6, 2012 Sensor-Based Robotic
INTRODUCTION: ABSTRACT:
 INDUSTRIAL INTELLIGENT LINE FOLLOWER ROBOT WITH AUTO GO DOWN DETECTION, AUTO OBSTACLES DETECTION, WIRELESS VEHICLE STATUS DATA TRANFER TO SERVER AND MANY MORE FEATURES INTRODUCTION: This project is based
INDUSTRIAL INTELLIGENT LINE FOLLOWER ROBOT WITH AUTO GO DOWN DETECTION, AUTO OBSTACLES DETECTION, WIRELESS VEHICLE STATUS DATA TRANFER TO SERVER AND MANY MORE FEATURES INTRODUCTION: This project is based
USTC Course for students entering Clemson F2013 Equivalent Clemson Course Counts for Clemson MS Core Area. CPSC 822 Case Study in Operating Systems
 USTC Course for students entering Clemson F2013 Equivalent Clemson Course Counts for Clemson MS Core Area 398 / SE05117 Advanced Cover software lifecycle: waterfall model, V model, spiral model, RUP and
USTC Course for students entering Clemson F2013 Equivalent Clemson Course Counts for Clemson MS Core Area 398 / SE05117 Advanced Cover software lifecycle: waterfall model, V model, spiral model, RUP and
Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen 2004
 Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen, National Instruments Pittcon 2004 As more control and verification is needed in medical
Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen, National Instruments Pittcon 2004 As more control and verification is needed in medical
RPLIDAR. Low Cost 360 degree 2D Laser Scanner (LIDAR) System Development Kit User Manual. 2014-2 Rev.1
 System Development Kit User Manual. 2014-2 Rev.1") RPLIDAR Low Cost 360 degree 2D Laser Scanner (LIDAR) Development Kit User Manual 2014-2 Rev.1 Team Contents: 1. OVERVIEW... 2 ITEMS IN DEVELOPMENT KIT... 2 RPLIDAR... 2 USB ADAPTER... 3 2. CONNECTION AND
RPLIDAR Low Cost 360 degree 2D Laser Scanner (LIDAR) Development Kit User Manual 2014-2 Rev.1 Team Contents: 1. OVERVIEW... 2 ITEMS IN DEVELOPMENT KIT... 2 RPLIDAR... 2 USB ADAPTER... 3 2. CONNECTION AND
PART I: WELCOME TO THE WONDERFUL WORLD OF ACCESSORIES CHAPTER 1: INTRODUCTION TO ANDROID OPEN ACCESSORY 3
 INTRODUCTION xxi PART I: WELCOME TO THE WONDERFUL WORLD OF ACCESSORIES CHAPTER 1: INTRODUCTION TO ANDROID OPEN ACCESSORY 3 I, Android 3 The Three Laws of Android 4 The Android Philosophy 6 Other Popular
INTRODUCTION xxi PART I: WELCOME TO THE WONDERFUL WORLD OF ACCESSORIES CHAPTER 1: INTRODUCTION TO ANDROID OPEN ACCESSORY 3 I, Android 3 The Three Laws of Android 4 The Android Philosophy 6 Other Popular
Horizontal IoT Application Development using Semantic Web Technologies
 Horizontal IoT Application Development using Semantic Web Technologies Soumya Kanti Datta Research Engineer Communication Systems Department Email: Soumya-Kanti.Datta@eurecom.fr Roadmap Introduction Challenges
Horizontal IoT Application Development using Semantic Web Technologies Soumya Kanti Datta Research Engineer Communication Systems Department Email: Soumya-Kanti.Datta@eurecom.fr Roadmap Introduction Challenges
Volume 2, Issue 2, February 2014 International Journal of Advance Research in Computer Science and Management Studies
 Volume 2, Issue 2, February 2014 International Journal of Advance Research in Computer Science and Management Studies Research Article / Paper / Case Study Available online at: www.ijarcsms.com Wireless
Volume 2, Issue 2, February 2014 International Journal of Advance Research in Computer Science and Management Studies Research Article / Paper / Case Study Available online at: www.ijarcsms.com Wireless
Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com g.teti@robotechsrl.
 2008/2009 A.A. Corso di Percezione Robotica Modulo D: Applicazioni ed Esercitazioni Lezione D.I Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com
2008/2009 A.A. Corso di Percezione Robotica Modulo D: Applicazioni ed Esercitazioni Lezione D.I Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com
Android Application Development and Bluetooth Technology
 Android Application Development and Bluetooth Technology James Cracchiolo 3/28/14 Table of Contents Introduction page 3 Objective page 3 What is Bluetooth? page 3 What is Android? page 4 Materials Needed
Android Application Development and Bluetooth Technology James Cracchiolo 3/28/14 Table of Contents Introduction page 3 Objective page 3 What is Bluetooth? page 3 What is Android? page 4 Materials Needed
Software Design Document (SDD) Template
 Template") (SDD) Template Software design is a process by which the software requirements are translated into a representation of software components, interfaces, and data necessary for the implementation phase.
(SDD) Template Software design is a process by which the software requirements are translated into a representation of software components, interfaces, and data necessary for the implementation phase.
Self-Balancing Robot Project Proposal Abstract. Strategy. Physical Construction. Spencer Burdette March 9, 2007 sburd@gwu.edu
 Spencer Burdette March 9, 2007 sburd@gwu.edu Self-Balancing Robot Project Proposal Abstract This project will undertake the construction and implementation of a two-wheeled robot that is capable of balancing
Spencer Burdette March 9, 2007 sburd@gwu.edu Self-Balancing Robot Project Proposal Abstract This project will undertake the construction and implementation of a two-wheeled robot that is capable of balancing
An Avatar Based Translation System from Arabic Speech to Arabic Sign Language for Deaf People
 International Journal of Information Science and Education. ISSN 2231-1262 Volume 2, Number 1 (2012) pp. 13-20 Research India Publications http://www. ripublication.com An Avatar Based Translation System
International Journal of Information Science and Education. ISSN 2231-1262 Volume 2, Number 1 (2012) pp. 13-20 Research India Publications http://www. ripublication.com An Avatar Based Translation System
Software development life cycle. Software Engineering - II ITNP92 - Object Oriented Software Design. Requirements. Requirements. Dr Andrea Bracciali
 Software development life cycle Software life cycle: Software Engineering - II ITNP92 - Object Oriented Software Design Dr Andrea Bracciali Module Co-ordinator 4B86 abb@cs.stir.ac.uk Spring 2014 (elicitation)
Software development life cycle Software life cycle: Software Engineering - II ITNP92 - Object Oriented Software Design Dr Andrea Bracciali Module Co-ordinator 4B86 abb@cs.stir.ac.uk Spring 2014 (elicitation)
TOSR0X-D. USB/Wireless Timer Relay Module. User Manual. Tinysine Electronics @ 2013 Version 1.0
 TOSR0X-D USB/Wireless Timer Relay Module User Manual Tinysine Electronics @ 2013 Version 1.0 INTRODUCTION This USB/Wireless Timer Relay Module allows computer control switching of external devices by using
TOSR0X-D USB/Wireless Timer Relay Module User Manual Tinysine Electronics @ 2013 Version 1.0 INTRODUCTION This USB/Wireless Timer Relay Module allows computer control switching of external devices by using