CORRECTION OF DYNAMIC WHEEL FORCES MEASURED ON ROAD SIMULATORS
|
|
|
- Theodora Hunt
- 9 years ago
- Views:
Transcription
1 Pages 1 to 35 CORRECTION OF DYNAMIC WHEEL FORCES MEASURED ON ROAD SIMULATORS Bohdan T. Kulakowski and Zhijie Wang Pennsylvania Transportation Institute The Pennsylvania State University University Park, PA 1680, USA John de Pont Transport Research Engineering New Zealand Limited Auckland, New Zealand ABSTRACT In a typical test procedure involving a road simulator, an elevation profile of a selected road section is measured and recorded using a computer data acquisition system. In general, actuators are unable to follow the input profile signals exactly due to an inherent inertia of the road simulator-vehicle system. As a result, the response of a vehicle tested on a road simulator is different from the response of the same vehicle tested on an actual road section. Several procedures have been developed to compensate for the actuators= dynamics and to ensure that the vehicle response on a road simulator is the same as in road tests. In general, there are two groups of methods that can be used to ensure that the results of road simulator tests are the same as the results obtained in tests on actual roads. In the first group of methods, called Input-Correction Methods, the original actuator input signal is adjusted iteratively until the vehicle response matches the response obtained in road tests. These methods are commonly known as Remote Parameter Control (RPC) methods. This paper presents an alternative method which can be classified as an Output-Correction Method. In the proposed method, only one road simulator test is performed using the original road profile as the input signal and the vehicle response measured in the test is subsequently processed to compensate for the effects of the road simulator=s dynamics. In both groups of methods a certain knowledge of the system dynamics is required. In the input-correction methods, a transfer function of the entire system, i.e. the road simulator with the test vehicle, needs to be evaluated whereas in the output-correction methods only the transfer function of the road simulator itself is needed. In the proposed method, a nonlinear mathematical model of the simulator is first derived analytically and then linearized assuming small deviations from the normal operating point conditions. Results from the road simulator tests processed using the output-correction method are presented and compared with the results of tests conducted on actual roads.

2 INTRODUCTION Road simulators are servo hydraulic actuation systems consisting of several (usually two, four, or six) hydraulic actuators whose vertical displacements are controlled by a computer system to simulate road profile excitations applied to the wheels of a vehicle traveling over the particular section of road. Road simulators have been used extensively by vehicle manufacturers in durability tests of vehicles and/or vehicle components [1, ]. In several recent studies, road simulators were employed in tests of dynamic wheel loads generated by heavy vehicles traveling over uneven road surfaces [3, 4, 5,6]. The main reason for road simulators to be an attractive research tool in vehicle testing is that they allow for conducting vehicle tests under well controlled laboratory conditions without the logistical and weather problems that often arise in tests performed on actual in-service roads. A truck-road simulator testing setup is shown in figure 1. The input to the system is the vector of measured road profiles, x p, which usually has two components, one for each (left and right) wheel track. The performance of the actuators is controlled by two analog controllers, a proportional gain controller and a differential pressure controller. The two controllers are tuned to obtain the best dynamic performance of the actuators such that the vector of the actuator displacements, x a, is as close as possible to the road profile vector, x p [7]. In tests conducted on actual roads, the vehicle traveling over the particular section of road generates a dynamic response, which can be represented mathematically by a vehicle response vector y. In tests performed on a road simulator, the measured road profile, x p, (which will be assumed here to be the same as the actual road profile) is used as input to the road simulator but the vehicle is now subjected to the displacements of the simulator actuators, represented by x a, which are different from the input profile signal due to inherent inertia of mechanical and hydraulic components of the actuators. Since the vehicle is subjected to different input signals in road simulator tests, its response, y *, is also different from the response, y, generated in road tests. Block diagrams in figure illustrate the two testing arrangements. In order to obtain the same response in road simulator tests as the response that the vehicle would generate in actual road tests, the system shown in figure b has to be modified to compensate for the actuators= dynamics. In most existing methods developed for this purpose, the input road profile signal is modified iteratively until the desired system performance is obtained. These methods can be referred to as Input Correction Methods. A block diagram of the most common testing system utilizing an input correction method is shown in figure 3. In this system, the input signal is modified iteratively until the response of the vehicle being tested, y, is sufficiently close to the response, y d, measured in actual road tests. This system is known as the Remote Parameter Control (RPC) system and the algorithm employed in correcting the input signal in this system is discussed in [8]. Another input correction method was developed by Moran et al. [5]. In this method, the input signal is modified to generate actuator displacements, x a, that match the measured road profiles, x p, as illustrated in the block diagram shown in figure 4. This paper presents an alternative method that can be used to ensure that results of road simulator tests agree with results of corresponding road tests. In the proposed method, which can be classified as an Output Correction Method, the input signal is not altered but, instead, the output, or the vehicle response, is processed to eliminate the effects of the actuator dynamics. A block diagram of the system with an output correction method is shown in figure 5. There is no
![Road simulators have been used extensively by vehicle manufacturers in durability tests of vehicles and/or vehicle components [1, ].](/docs-images/46/21781270/images/page_2.jpg "In several recent studies, road simulators were employed in tests of dynamic wheel loads generated by heavy vehicles traveling over uneven road surfaces [3, 4, 5,6].")
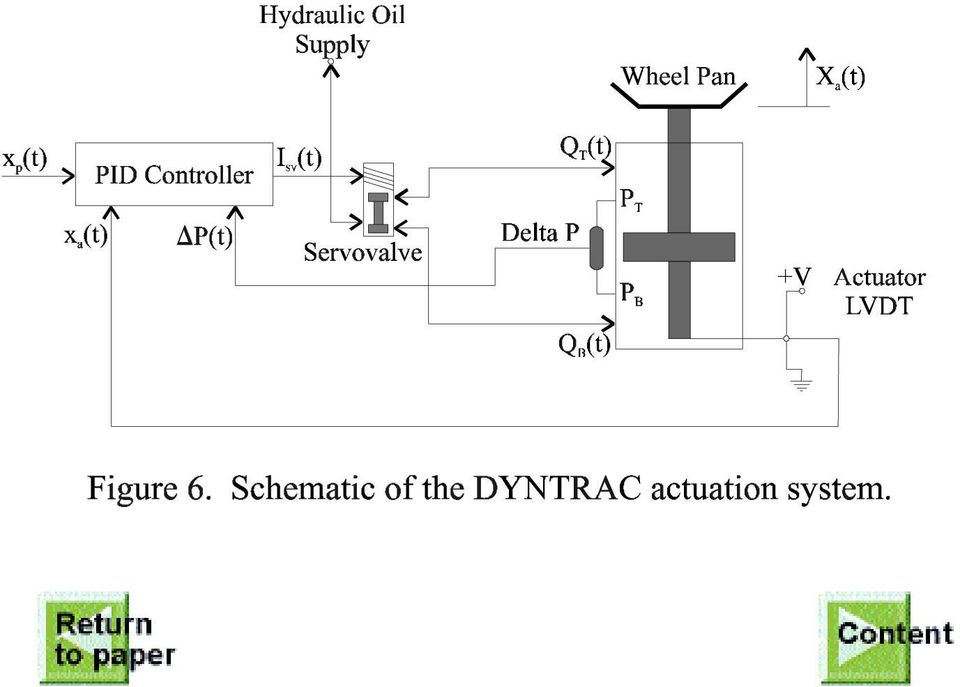
3 need for iterative modifications of any of the signals when this method is used. It does, however, require the knowledge of the actuators= transfer functions. The output correction algorithm is described next, followed by the analytical derivation of a suitable mathematical model of the actuator. Finally, some experimental results obtained in tests conducted on the Federal Highway Administration=s simulator, called DYNTRAC (DYNamic Truck Actuation system), are presented. OUTPUT CORRECTION ALGORITHM It should be noted that both input and output correction algorithms are derived assuming that the testing system consisting of the actuators and the test vehicle is linear. Under this assumption the dynamics of the actuator and of the test vehicle can be represented by transfer functions T a (s) and T t (s). The response of the vehicle in road tests can be expressed as Y(s) = T t (s)x p (s) (1) where X p (s) is a Laplace transform of the road profile signal. In road simulator tests, the vehicle response, Y * (s), is additionally affected by the actuator dynamics Y * (s) = T t (s)t a (s)x p (s) () The two vehicle responses given by equations 1 and are obviously different. The vehicle response in road simulator tests can be modified to match the response obtained in road tests by multiplying it by the inverse transfer function of the actuator. The corrected vehicle response, Y c (s), is then, theoretically, the same as the vehicle response recorded in road tests, Y c (s) = Y * (s)t a -1 (s) = Y(s) (3) To perform the output correction described by equation 3, the transfer function of the actuator must be known. The actuator transfer function can be identified from experimental results following a procedure similar to that employed in the input correction methods. In this paper, the actuator transfer function will be obtained by linearizing a nonlinear mathematical model of the actuator, assuming small deviations from the actuator=s normal operating point conditions. MATHEMATICAL MODEL OF ACTUATOR As indicated earlier, the road simulator used in this analysis is DYNTRAC, which was specifically designed to simulate dynamic forces applied by heavy trucks to pavements. It uses four 156 kn hydraulic actuators controlled by 380 lpm 3-stage servovalves. The actuators= displacements are controlled using LVDT feedback for position control with a stroke of 15. cm. In addition, a differential pressure feedback is used for stabilization of large inertial loads. A schematic of a DYNTRAC actuator is shown in figure 6. A detailed nonlinear model of the actuator and a computer simulation package was described in [7]. The mathematical model has ten states and includes a second-order model of servovalve dynamics, oil compliance on each side of the actuator piston, the mass of the wheelpan and piston assembly, and a quarter-vehicle model which is excited by the wheelpan position. This nonlinear model has been simplified and linearized as described by Wang [9]. The following overall transfer function, relating actuator displacement to road profile

4 signal, was derived for the linearized model a T a (s) = X (s) p 1 0 X (s) = b s+ b as+as+as+as+ a where: b 0 = b 1 = a 0 = K sv K q K e a 1 = a 0 + (K c + K dp K sv K q )k t /A p p f t c dp Ksv K q) b A + Vk p β e p a =(K +K 4 A +1 p f p 3 c dp Ksv K q) m A + Vb p 4β eap a =(K +K f p a 4= Vm 4β eap The above equations express the coefficients of the actuator transfer function in terms of parameters of the linearized model of the actuator (static gain of servovalve, K sv, gains of the linearized model of servovalve, K q and K c, piston cross - sectional area, A p, total volume of fluid in the actuator chambers, V f, effective bulk modulus of fluid, $ e, total mass of piston and load, m p, and coefficient of viscous friction, b p ), parameters of the analog controllers (K e and K dp ), and vehicle tire stiffness, k t [9]. In order to verify the accuracy of the linearization, the step response of the linearized model of DYNTRAC was compared with that of the nonlinear model. Figure 7 shows the two step responses. It can be seen that the two models produce very similar responses. The linearized model of DYNTRAC was further evaluated by comparing the dynamic wheel forces simulated with the nonlinear and linearized models with the forces measured in actual road tests. The dynamic wheel forces are characterized by a Dynamic Load Coefficient (DLC) defined as the ratio of standard deviation over mean wheel force. From the results shown in table 1, it can be seen that the value of DLC obtained in the road simulator test is considerably lower than the value calculated from the wheel forces measured in the road test due to the actuators= inability to follow the input road profile with sufficient accuracy, as discussed earlier. The results shown in table 1 also indicate an excellent agreement between the DLC=s obtained in the road simulator test and the DLC=s calculated from the nonlinear as well as the linearized model of the road simulator.
, parameters of the analog")
5 Table 1. Comparison of DLC=s obtained from experimental and simulated data. Road Test DYNTRAC Test Nonlinear Model Linearized Model DLC Figure 8 shows sample traces of wheel forces measured on DYNTRAC and processed using the output correction algorithm. RESULTS OF OUTPUT CORRECTION METHOD In the output correction algorithm, given by equation 3, the actuator displacement signal is multiplied by the inverse of the actuator transfer function defined by equation 4. It is quite clear that the fourth-order transfer function with only one zero, such as that given by equation 4, will lead to an inverse transfer function whose gain increases rapidly with frequency. This will make the correction algorithm extremely sensitive to a high frequency noise that is likely to contaminate the actuator displacement signal and may even result in a numerical instability of the correction process. To eliminate this problem, a low-pass filter was inserted in series with the inverse transfer function to supress the high-frequency components. The transfer function of the fourth-order lowpass filter used for this purpose is ω T 1 F (s) = s ζ ω s+ ω s + ζ s+ ω ω ω The two corner frequencies, T 1 and T, were chosen to be approximately 16 and 4 Hz, respectively and both damping ratios,. 1 and., were set to be 1. So, the modified inverted transfer function of the actuator is a b s+ b s +ζ ω s+ ω s +ζωs+ ω T (s) = as+as+as+as+ a ω ω The output correction algorithm was applied to three data sets representing dynamic wheel forces measured on the road simulator for various combinations of road roughness, vehicle speed, and payload. The measured and corrected values of DLC were compared with the DLC=s obtained in actual road tests under the same test conditions. The results are shown in table.

6 Table. Values of DLC from road, road simulator, and corrected wheel forces. Road DYNTRAC Corrected DYNTRAC Roughness: medium Speed: 7 km/h Payload: 6360 kg Roughness: high Speed: 48 km/h Payload: 3640 kg Roughness: high Speed: 7 km/h Payload: 3640 kg It can be seen that the DLC=s of the corrected wheel forces are very close to the DLC obtained from measurements conducted in road tests in two of the cases. In the third case the agreement between the road and corrected DLC is not that close but the corrected result is still much closer to the road test DLC than the DLC obtained from the forces simulated on the road simulator. CONCLUSIONS The output correction algorithm presented in this paper as an alternative method for processing dynamic wheel forces measured in tests conducted on road simulators was shown to produce values of DLC that are much closer to the DLC=s obtained in tests on actual roads. The proposed correction algorithm uses a transfer function of the linearized mathematical model of the actuator, which was derived analytically from the basic equations of motion of the entire road simulator system. The inverted transfer function of the actuator is modified by a fourth-order low-pass filter to eliminate numerical instability of the correction algorithm caused by high-frequency components in the signals being processed. While the results obtained with the proposed method have been very promising, more work is needed in order to further validate this method, particularly with other road simulators systems.

7 REFERENCES 1. Petersen, J. and Weisberger, G., The Conception, Description, and Application of a New Vehicle Endurance Test System at Audi NSU,@ Society of Automotive Engineers, Paper No , Pierce, P. R., AUsing Simulated Road Surface Inputs for Dynamic Analysis of Heavy Truck Combination Vehicles,@ Society of Automotive Engineers, Paper No , Hu, G., AUse of a Road Simulator for Measuring Dynamic Wheel Loads,@ Society of Automotive Engineers, Paper No , De Pont, J., AUsing servohydraulics to assess heavy vehicle suspensions for road wear,@ Heavy vehicles and roads: technology, safety and policy, D. Cebon and C. G. B. Mitchell, Eds., Thomas Telford, London, 199, pp Moran, T., Sullivan, M., Menmuir, D., and Mahoney, J., AReplication of Heavy Truck Dynamic Wheel Loads Using a Road Simulator,@ Road Transport Technology - 4, Proceedings of the Fourth International Symposium on Heavy Vehicle Weights and Dimensions, C. Winkler, Ed., University of Michigan, 1995, pp Kulakowski, B. T., Husted, D. C., Streit, D. A., and Kenis, W. J., AModels of Dynamic Load Coefficient for Two-Axle Truck Obtained from Road Simulator Data,@ Heavy Vehicle Systems, Special Series, Int. J. Of Vehicle Design, Vol. 3, Nos. 1-4, 1996, pp Gardner, J. F., Kulakowski, B. T., Gore, S. A., and Streit, D. A., AModeling and Tuning of Hydraulic Road Simulators for Heavy Vehicle Testing,@ 8. De Pont, J., ARating heavy vehicle suspensions for >road friendliness=,@ Heavy Vehicle Systems, Special Series, Int. J. Of Vehicle Design, Vol. 1, No. 1, 1993, pp Wang, Z., AAn Algorithm for Correction of Dynamic Wheel Forces Measured on Road Simulators,@ M. S. Paper in Mechanical Engineering, The Pennsylvania State University, 1966.

8

9

10

11

12

13
14

15

Manufacturing Equipment Modeling
 QUESTION 1 For a linear axis actuated by an electric motor complete the following: a. Derive a differential equation for the linear axis velocity assuming viscous friction acts on the DC motor shaft, leadscrew,
QUESTION 1 For a linear axis actuated by an electric motor complete the following: a. Derive a differential equation for the linear axis velocity assuming viscous friction acts on the DC motor shaft, leadscrew,
Parameter identification of a linear single track vehicle model
 Parameter identification of a linear single track vehicle model Edouard Davin D&C 2011.004 Traineeship report Coach: dr. Ir. I.J.M. Besselink Supervisors: prof. dr. H. Nijmeijer Eindhoven University of
Parameter identification of a linear single track vehicle model Edouard Davin D&C 2011.004 Traineeship report Coach: dr. Ir. I.J.M. Besselink Supervisors: prof. dr. H. Nijmeijer Eindhoven University of
EDUMECH Mechatronic Instructional Systems. Ball on Beam System
 EDUMECH Mechatronic Instructional Systems Ball on Beam System Product of Shandor Motion Systems Written by Robert Hirsch Ph.D. 998-9 All Rights Reserved. 999 Shandor Motion Systems, Ball on Beam Instructional
EDUMECH Mechatronic Instructional Systems Ball on Beam System Product of Shandor Motion Systems Written by Robert Hirsch Ph.D. 998-9 All Rights Reserved. 999 Shandor Motion Systems, Ball on Beam Instructional
Dynamic Analysis of the Dortmund University Campus Sky Train
 Dynamic Analysis of the Dortmund University Campus Sky Train Reinhold Meisinger Mechanical Engineering Department Nuremberg University of Applied Sciences Kesslerplatz 12, 90121 Nuremberg, Germany Abstract
Dynamic Analysis of the Dortmund University Campus Sky Train Reinhold Meisinger Mechanical Engineering Department Nuremberg University of Applied Sciences Kesslerplatz 12, 90121 Nuremberg, Germany Abstract
Slide 10.1. Basic system Models
 Slide 10.1 Basic system Models Objectives: Devise Models from basic building blocks of mechanical, electrical, fluid and thermal systems Recognize analogies between mechanical, electrical, fluid and thermal
Slide 10.1 Basic system Models Objectives: Devise Models from basic building blocks of mechanical, electrical, fluid and thermal systems Recognize analogies between mechanical, electrical, fluid and thermal
Time Domain and Frequency Domain Techniques For Multi Shaker Time Waveform Replication
 Time Domain and Frequency Domain Techniques For Multi Shaker Time Waveform Replication Thomas Reilly Data Physics Corporation 1741 Technology Drive, Suite 260 San Jose, CA 95110 (408) 216-8440 This paper
Time Domain and Frequency Domain Techniques For Multi Shaker Time Waveform Replication Thomas Reilly Data Physics Corporation 1741 Technology Drive, Suite 260 San Jose, CA 95110 (408) 216-8440 This paper
Controller Design in Frequency Domain
 ECSE 4440 Control System Engineering Fall 2001 Project 3 Controller Design in Frequency Domain TA 1. Abstract 2. Introduction 3. Controller design in Frequency domain 4. Experiment 5. Colclusion 1. Abstract
ECSE 4440 Control System Engineering Fall 2001 Project 3 Controller Design in Frequency Domain TA 1. Abstract 2. Introduction 3. Controller design in Frequency domain 4. Experiment 5. Colclusion 1. Abstract
Active Vibration Isolation of an Unbalanced Machine Spindle
 UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
UCRL-CONF-206108 Active Vibration Isolation of an Unbalanced Machine Spindle D. J. Hopkins, P. Geraghty August 18, 2004 American Society of Precision Engineering Annual Conference Orlando, FL, United States
INTERACTION BETWEEN MOVING VEHICLES AND RAILWAY TRACK AT HIGH SPEED
 INTERACTION BETWEEN MOVING VEHICLES AND RAILWAY TRACK AT HIGH SPEED Prof.Dr.Ir. C. Esveld Professor of Railway Engineering TU Delft, The Netherlands Dr.Ir. A.W.M. Kok Associate Professor of Railway Engineering
INTERACTION BETWEEN MOVING VEHICLES AND RAILWAY TRACK AT HIGH SPEED Prof.Dr.Ir. C. Esveld Professor of Railway Engineering TU Delft, The Netherlands Dr.Ir. A.W.M. Kok Associate Professor of Railway Engineering
7.2.4 Seismic velocity, attenuation and rock properties
 7.2.4 Seismic velocity, attenuation and rock properties Rock properties that affect seismic velocity Porosity Lithification Pressure Fluid saturation Velocity in unconsolidated near surface soils (the
7.2.4 Seismic velocity, attenuation and rock properties Rock properties that affect seismic velocity Porosity Lithification Pressure Fluid saturation Velocity in unconsolidated near surface soils (the
Direct Acceleration Feedback Control of Shake Tables with Force. Stabilization
 Direct Acceleration Feedback Control of Shake Tables with Force Stabilization Matthew Stehman [1] and Narutoshi Nakata [2] [1] Graduate Student, Department of Civil Engineering, The Johns Hopkins University,
Direct Acceleration Feedback Control of Shake Tables with Force Stabilization Matthew Stehman [1] and Narutoshi Nakata [2] [1] Graduate Student, Department of Civil Engineering, The Johns Hopkins University,
Electro-Hydraulic Servo Valve Construction, Models and Use
 Electro-Hydraulic Servo Valve Construction, Models and Use From Merritt, H. E., Hydraulic Control Systems, J. Wiley, 1967. The input to an electro-hydraulic (EH) servovalve is typically a current or a
Electro-Hydraulic Servo Valve Construction, Models and Use From Merritt, H. E., Hydraulic Control Systems, J. Wiley, 1967. The input to an electro-hydraulic (EH) servovalve is typically a current or a
System Modeling and Control for Mechanical Engineers
 Session 1655 System Modeling and Control for Mechanical Engineers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: [email protected] Abstract
Session 1655 System Modeling and Control for Mechanical Engineers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: [email protected] Abstract
Dynamic Process Modeling. Process Dynamics and Control
 Dynamic Process Modeling Process Dynamics and Control 1 Description of process dynamics Classes of models What do we need for control? Modeling for control Mechanical Systems Modeling Electrical circuits
Dynamic Process Modeling Process Dynamics and Control 1 Description of process dynamics Classes of models What do we need for control? Modeling for control Mechanical Systems Modeling Electrical circuits
Introduction to Engineering System Dynamics
 CHAPTER 0 Introduction to Engineering System Dynamics 0.1 INTRODUCTION The objective of an engineering analysis of a dynamic system is prediction of its behaviour or performance. Real dynamic systems are
CHAPTER 0 Introduction to Engineering System Dynamics 0.1 INTRODUCTION The objective of an engineering analysis of a dynamic system is prediction of its behaviour or performance. Real dynamic systems are
Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist
 Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist MHER GRIGORIAN, TAREK SOBH Department of Computer Science and Engineering, U. of Bridgeport, USA ABSTRACT Robot
Design-Simulation-Optimization Package for a Generic 6-DOF Manipulator with a Spherical Wrist MHER GRIGORIAN, TAREK SOBH Department of Computer Science and Engineering, U. of Bridgeport, USA ABSTRACT Robot
OPTIMIZATION OF DIAMETER RATIO FOR ALPHA-TYPE STIRLING ENGINES
 OPTIMIZATION OF DIAMETER RATIO FOR ALPHA-TYPE STIRLING ENGINES VLAD MARIO HOMUTESCU* DAN-TEODOR BĂLĂNESCU* * Gheorghe Asachi Technical University of Iassy Department of of ermotechnics ermal Engines and
OPTIMIZATION OF DIAMETER RATIO FOR ALPHA-TYPE STIRLING ENGINES VLAD MARIO HOMUTESCU* DAN-TEODOR BĂLĂNESCU* * Gheorghe Asachi Technical University of Iassy Department of of ermotechnics ermal Engines and
Research Article Determination of Pavement Rehabilitation Activities through a Permutation Algorithm
 Applied Mathematics Volume 2013, Article ID 252808, 5 pages http://dxdoiorg/101155/2013/252808 Research Article Determination of Pavement Rehabilitation Activities through a Permutation Algorithm Sangyum
Applied Mathematics Volume 2013, Article ID 252808, 5 pages http://dxdoiorg/101155/2013/252808 Research Article Determination of Pavement Rehabilitation Activities through a Permutation Algorithm Sangyum
The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w
![The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w](/thumbs/25/5134815.jpg "The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w") Chapter 4 Vehicle Dynamics 4.. Introduction In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration
Chapter 4 Vehicle Dynamics 4.. Introduction In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration
MODELING FIRST AND SECOND ORDER SYSTEMS IN SIMULINK
 MODELING FIRST AND SECOND ORDER SYSTEMS IN SIMULINK First and second order differential equations are commonly studied in Dynamic courses, as they occur frequently in practice. Because of this, we will
MODELING FIRST AND SECOND ORDER SYSTEMS IN SIMULINK First and second order differential equations are commonly studied in Dynamic courses, as they occur frequently in practice. Because of this, we will
Clutch and Operation as a System
 Clutch and Operation as a System Dipl.-Ing. Matthias Zink Dipl.-Ing. René Shead Introduction New technologies and increasing demands for comfort, require increased total system thinking, also in the area
Clutch and Operation as a System Dipl.-Ing. Matthias Zink Dipl.-Ing. René Shead Introduction New technologies and increasing demands for comfort, require increased total system thinking, also in the area
METHODOLOGICAL CONSIDERATIONS OF DRIVE SYSTEM SIMULATION, WHEN COUPLING FINITE ELEMENT MACHINE MODELS WITH THE CIRCUIT SIMULATOR MODELS OF CONVERTERS.
 SEDM 24 June 16th - 18th, CPRI (Italy) METHODOLOGICL CONSIDERTIONS OF DRIVE SYSTEM SIMULTION, WHEN COUPLING FINITE ELEMENT MCHINE MODELS WITH THE CIRCUIT SIMULTOR MODELS OF CONVERTERS. Áron Szûcs BB Electrical
SEDM 24 June 16th - 18th, CPRI (Italy) METHODOLOGICL CONSIDERTIONS OF DRIVE SYSTEM SIMULTION, WHEN COUPLING FINITE ELEMENT MCHINE MODELS WITH THE CIRCUIT SIMULTOR MODELS OF CONVERTERS. Áron Szûcs BB Electrical
ACCELERATION CHARACTERISTICS OF VEHICLES IN RURAL PENNSYLVANIA
 www.arpapress.com/volumes/vol12issue3/ijrras_12_3_14.pdf ACCELERATION CHARACTERISTICS OF VEHICLES IN RURAL PENNSYLVANIA Robert M. Brooks Associate Professor, Department of Civil and Environmental Engineering,
www.arpapress.com/volumes/vol12issue3/ijrras_12_3_14.pdf ACCELERATION CHARACTERISTICS OF VEHICLES IN RURAL PENNSYLVANIA Robert M. Brooks Associate Professor, Department of Civil and Environmental Engineering,
Equivalent Spring Stiffness
 Module 7 : Free Undamped Vibration of Single Degree of Freedom Systems; Determination of Natural Frequency ; Equivalent Inertia and Stiffness; Energy Method; Phase Plane Representation. Lecture 13 : Equivalent
Module 7 : Free Undamped Vibration of Single Degree of Freedom Systems; Determination of Natural Frequency ; Equivalent Inertia and Stiffness; Energy Method; Phase Plane Representation. Lecture 13 : Equivalent
Guideway Joint Surface Properties of Heavy Machine Tools Based on the Theory of Similarity
 Research Journal of Applied Sciences, Engineering and Technology 5(): 530-536, 03 ISSN: 040-7459; e-issn: 040-7467 Maxwell Scientific Organization, 03 Submitted: October, 0 Accepted: December 03, 0 Published:
Research Journal of Applied Sciences, Engineering and Technology 5(): 530-536, 03 ISSN: 040-7459; e-issn: 040-7467 Maxwell Scientific Organization, 03 Submitted: October, 0 Accepted: December 03, 0 Published:
COUNTERBALANCE VALVES
 COUNTERBALANCE VALVES Introduction They are modulating valves which allow free flow into the actuator and then block the reverse flow until they feel a pilot pressure inversely proportional to the load
COUNTERBALANCE VALVES Introduction They are modulating valves which allow free flow into the actuator and then block the reverse flow until they feel a pilot pressure inversely proportional to the load
Force/position control of a robotic system for transcranial magnetic stimulation
 Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
Force/position control of a robotic system for transcranial magnetic stimulation W.N. Wan Zakaria School of Mechanical and System Engineering Newcastle University Abstract To develop a force control scheme
dspace DSP DS-1104 based State Observer Design for Position Control of DC Servo Motor
 dspace DSP DS-1104 based State Observer Design for Position Control of DC Servo Motor Jaswandi Sawant, Divyesh Ginoya Department of Instrumentation and control, College of Engineering, Pune. ABSTRACT This
dspace DSP DS-1104 based State Observer Design for Position Control of DC Servo Motor Jaswandi Sawant, Divyesh Ginoya Department of Instrumentation and control, College of Engineering, Pune. ABSTRACT This
Working Model 2D Exercise Problem 14.111. ME 114 Vehicle Design Dr. Jose Granda. Performed By Jeffrey H. Cho
 Working Model 2D Exercise Problem 14.111 ME 114 Vehicle Design Dr. Jose Granda Performed By Jeffrey H. Cho Table of Contents Problem Statement... 1 Simulation Set-Up...2 World Settings... 2 Gravity...
Working Model 2D Exercise Problem 14.111 ME 114 Vehicle Design Dr. Jose Granda Performed By Jeffrey H. Cho Table of Contents Problem Statement... 1 Simulation Set-Up...2 World Settings... 2 Gravity...
PC BASED PID TEMPERATURE CONTROLLER
 PC BASED PID TEMPERATURE CONTROLLER R. Nisha * and K.N. Madhusoodanan Dept. of Instrumentation, Cochin University of Science and Technology, Cochin 22, India ABSTRACT: A simple and versatile PC based Programmable
PC BASED PID TEMPERATURE CONTROLLER R. Nisha * and K.N. Madhusoodanan Dept. of Instrumentation, Cochin University of Science and Technology, Cochin 22, India ABSTRACT: A simple and versatile PC based Programmable
DEVELOPMENT OF HIGH SPEED RESPONSE LAMINAR FLOW METER FOR AIR CONDITIONING
 DEVELOPMENT OF HIGH SPEED RESPONSE LAMINAR FLOW METER FOR AIR CONDITIONING Toshiharu Kagawa 1, Yukako Saisu 2, Riki Nishimura 3 and Chongho Youn 4 ABSTRACT In this paper, we developed a new laminar flow
DEVELOPMENT OF HIGH SPEED RESPONSE LAMINAR FLOW METER FOR AIR CONDITIONING Toshiharu Kagawa 1, Yukako Saisu 2, Riki Nishimura 3 and Chongho Youn 4 ABSTRACT In this paper, we developed a new laminar flow
Non-hertzian contact model in wheel/rail or vehicle/track system
 XXV Symposium Vibrations in Physical Systems, Poznan Bedlewo, May 15-19, 212 Non-hertzian contact model in wheel/rail or vehicle/track system Bartłomiej DYNIEWICZ Institute of Fundamental Technological
XXV Symposium Vibrations in Physical Systems, Poznan Bedlewo, May 15-19, 212 Non-hertzian contact model in wheel/rail or vehicle/track system Bartłomiej DYNIEWICZ Institute of Fundamental Technological
Physics 9e/Cutnell. correlated to the. College Board AP Physics 1 Course Objectives
 Physics 9e/Cutnell correlated to the College Board AP Physics 1 Course Objectives Big Idea 1: Objects and systems have properties such as mass and charge. Systems may have internal structure. Enduring
Physics 9e/Cutnell correlated to the College Board AP Physics 1 Course Objectives Big Idea 1: Objects and systems have properties such as mass and charge. Systems may have internal structure. Enduring
Modeling Mechanical Systems
 chp3 1 Modeling Mechanical Systems Dr. Nhut Ho ME584 chp3 2 Agenda Idealized Modeling Elements Modeling Method and Examples Lagrange s Equation Case study: Feasibility Study of a Mobile Robot Design Matlab
chp3 1 Modeling Mechanical Systems Dr. Nhut Ho ME584 chp3 2 Agenda Idealized Modeling Elements Modeling Method and Examples Lagrange s Equation Case study: Feasibility Study of a Mobile Robot Design Matlab
QNET Experiment #06: HVAC Proportional- Integral (PI) Temperature Control Heating, Ventilation, and Air Conditioning Trainer (HVACT)
 Temperature Control Heating, Ventilation, and Air Conditioning Trainer (HVACT)") Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #06: HVAC Proportional- Integral (PI) Temperature Control Heating, Ventilation, and Air Conditioning Trainer (HVACT) Student Manual Table of Contents
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #06: HVAC Proportional- Integral (PI) Temperature Control Heating, Ventilation, and Air Conditioning Trainer (HVACT) Student Manual Table of Contents
SOFTWARE FOR GENERATION OF SPECTRUM COMPATIBLE TIME HISTORY
 3 th World Conference on Earthquake Engineering Vancouver, B.C., Canada August -6, 24 Paper No. 296 SOFTWARE FOR GENERATION OF SPECTRUM COMPATIBLE TIME HISTORY ASHOK KUMAR SUMMARY One of the important
3 th World Conference on Earthquake Engineering Vancouver, B.C., Canada August -6, 24 Paper No. 296 SOFTWARE FOR GENERATION OF SPECTRUM COMPATIBLE TIME HISTORY ASHOK KUMAR SUMMARY One of the important
In-situ Load Testing to Evaluate New Repair Techniques
 In-situ Load Testing to Evaluate New Repair Techniques W.J. Gold 1 and A. Nanni 2 1 Assistant Research Engineer, Univ. of Missouri Rolla, Dept. of Civil Engineering 2 V&M Jones Professor, Univ. of Missouri
In-situ Load Testing to Evaluate New Repair Techniques W.J. Gold 1 and A. Nanni 2 1 Assistant Research Engineer, Univ. of Missouri Rolla, Dept. of Civil Engineering 2 V&M Jones Professor, Univ. of Missouri
Comparison different seat-spine transfer functions for vibrational comfort monitoring of car passengers
 Comparison different seat-spine transfer functions for vibrational comfort monitoring of car passengers Massimo Cavacece 1, Daniele Carnevale 3, Ettore Pennestrì 2, Pier Paolo Valentini 2, Fabrizio Scirè,
Comparison different seat-spine transfer functions for vibrational comfort monitoring of car passengers Massimo Cavacece 1, Daniele Carnevale 3, Ettore Pennestrì 2, Pier Paolo Valentini 2, Fabrizio Scirè,
Chapter 3 Non-parametric Models for Magneto-Rheological Dampers
 Chapter 3 Non-parametric Models for Magneto-Rheological Dampers The primary purpose of this chapter is to present an approach for developing nonparametric models for magneto-rheological (MR) dampers. Upon
Chapter 3 Non-parametric Models for Magneto-Rheological Dampers The primary purpose of this chapter is to present an approach for developing nonparametric models for magneto-rheological (MR) dampers. Upon
STUDY OF DAM-RESERVOIR DYNAMIC INTERACTION USING VIBRATION TESTS ON A PHYSICAL MODEL
 STUDY OF DAM-RESERVOIR DYNAMIC INTERACTION USING VIBRATION TESTS ON A PHYSICAL MODEL Paulo Mendes, Instituto Superior de Engenharia de Lisboa, Portugal Sérgio Oliveira, Laboratório Nacional de Engenharia
STUDY OF DAM-RESERVOIR DYNAMIC INTERACTION USING VIBRATION TESTS ON A PHYSICAL MODEL Paulo Mendes, Instituto Superior de Engenharia de Lisboa, Portugal Sérgio Oliveira, Laboratório Nacional de Engenharia
Closed-Loop Motion Control Simplifies Non-Destructive Testing
 Closed-Loop Motion Control Simplifies Non-Destructive Testing Repetitive non-destructive testing (NDT) applications abound, and designers should consider using programmable motion controllers to power
Closed-Loop Motion Control Simplifies Non-Destructive Testing Repetitive non-destructive testing (NDT) applications abound, and designers should consider using programmable motion controllers to power
LABORATORY TESTS OF ACTIVE SUSPENSION SYSTEM
 Journal of KONES Powertrain and Transport, Vol. 18, No. 1 2011 LABORATORY TESTS OF ACTIVE SUSPENSION SYSTEM Jaros aw Konieczny AGH University of Science and Technology, Department of Process Control Mickiewicz
Journal of KONES Powertrain and Transport, Vol. 18, No. 1 2011 LABORATORY TESTS OF ACTIVE SUSPENSION SYSTEM Jaros aw Konieczny AGH University of Science and Technology, Department of Process Control Mickiewicz
Drivetech, Inc. Innovations in Motor Control, Drives, and Power Electronics
 Drivetech, Inc. Innovations in Motor Control, Drives, and Power Electronics Dal Y. Ohm, Ph.D. - President 25492 Carrington Drive, South Riding, Virginia 20152 Ph: (703) 327-2797 Fax: (703) 327-2747 [email protected]
Drivetech, Inc. Innovations in Motor Control, Drives, and Power Electronics Dal Y. Ohm, Ph.D. - President 25492 Carrington Drive, South Riding, Virginia 20152 Ph: (703) 327-2797 Fax: (703) 327-2747 [email protected]
Calibration and Use of a Strain-Gage-Instrumented Beam: Density Determination and Weight-Flow-Rate Measurement
 Chapter 2 Calibration and Use of a Strain-Gage-Instrumented Beam: Density Determination and Weight-Flow-Rate Measurement 2.1 Introduction and Objectives This laboratory exercise involves the static calibration
Chapter 2 Calibration and Use of a Strain-Gage-Instrumented Beam: Density Determination and Weight-Flow-Rate Measurement 2.1 Introduction and Objectives This laboratory exercise involves the static calibration
NUMERICAL ANALYSIS OF THE EFFECTS OF WIND ON BUILDING STRUCTURES
 Vol. XX 2012 No. 4 28 34 J. ŠIMIČEK O. HUBOVÁ NUMERICAL ANALYSIS OF THE EFFECTS OF WIND ON BUILDING STRUCTURES Jozef ŠIMIČEK email: [email protected] Research field: Statics and Dynamics Fluids mechanics
Vol. XX 2012 No. 4 28 34 J. ŠIMIČEK O. HUBOVÁ NUMERICAL ANALYSIS OF THE EFFECTS OF WIND ON BUILDING STRUCTURES Jozef ŠIMIČEK email: [email protected] Research field: Statics and Dynamics Fluids mechanics
MATLAB AS A PROTOTYPING TOOL FOR HYDRONIC NETWORKS BALANCING
 MATLAB AS A PROTOTYPING TOOL FOR HYDRONIC NETWORKS BALANCING J. Pekař, P. Trnka, V. Havlena* Abstract The objective of this note is to describe the prototyping stage of development of a system that is
MATLAB AS A PROTOTYPING TOOL FOR HYDRONIC NETWORKS BALANCING J. Pekař, P. Trnka, V. Havlena* Abstract The objective of this note is to describe the prototyping stage of development of a system that is
ACTIVE SAFETY OF TRUCKS AND ROAD TRAINS WITH WIDE BASE SINGLE TYRES INSTEAD OF TWIN TYRES
 ACTIVE SAFETY OF TRUCKS AND ROAD TRAINS WITH WIDE BASE SINGLE TYRES INSTEAD OF TWIN TYRES Dr.-Ing. Klaus-Peter Glaeser Federal Highway Research Institute, BASt Germany Paper No. 497 1 ABSTRACT The development
ACTIVE SAFETY OF TRUCKS AND ROAD TRAINS WITH WIDE BASE SINGLE TYRES INSTEAD OF TWIN TYRES Dr.-Ing. Klaus-Peter Glaeser Federal Highway Research Institute, BASt Germany Paper No. 497 1 ABSTRACT The development
Research on Vehicle Dynamics Simulation for Driving Simulator Fang Tang a, Yanding Wei b, Xiaojun Zhou c, Zhuhui Luo d, Mingxiang Xie e, Peixin Li f
 Advanced Materials Research Vols. 308-310 (2011) pp 1946-1950 Online available since 2011/Aug/16 at www.scientific.net (2011) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amr.308-310.1946
Advanced Materials Research Vols. 308-310 (2011) pp 1946-1950 Online available since 2011/Aug/16 at www.scientific.net (2011) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amr.308-310.1946
Precise Modelling of a Gantry Crane System Including Friction, 3D Angular Swing and Hoisting Cable Flexibility
 Precise Modelling of a Gantry Crane System Including Friction, 3D Angular Swing and Hoisting Cable Flexibility Renuka V. S. & Abraham T Mathew Electrical Engineering Department, NIT Calicut E-mail : [email protected],
Precise Modelling of a Gantry Crane System Including Friction, 3D Angular Swing and Hoisting Cable Flexibility Renuka V. S. & Abraham T Mathew Electrical Engineering Department, NIT Calicut E-mail : [email protected],
Loudspeaker Parameters. D. G. Meyer School of Electrical & Computer Engineering
 Loudspeaker Parameters D. G. Meyer School of Electrical & Computer Engineering Outline Review of How Loudspeakers Work Small Signal Loudspeaker Parameters Effect of Loudspeaker Cable Sample Loudspeaker
Loudspeaker Parameters D. G. Meyer School of Electrical & Computer Engineering Outline Review of How Loudspeakers Work Small Signal Loudspeaker Parameters Effect of Loudspeaker Cable Sample Loudspeaker
Positive Feedback and Oscillators
 Physics 3330 Experiment #6 Fall 1999 Positive Feedback and Oscillators Purpose In this experiment we will study how spontaneous oscillations may be caused by positive feedback. You will construct an active
Physics 3330 Experiment #6 Fall 1999 Positive Feedback and Oscillators Purpose In this experiment we will study how spontaneous oscillations may be caused by positive feedback. You will construct an active
Current-Transformer Phase-Shift Compensation and Calibration
 Application Report SLAA122 February 2001 Current-Transformer Phase-Shift Compensation and Calibration Kes Tam Mixed Signal Products ABSTRACT This application report demonstrates a digital technique to
Application Report SLAA122 February 2001 Current-Transformer Phase-Shift Compensation and Calibration Kes Tam Mixed Signal Products ABSTRACT This application report demonstrates a digital technique to
Introduction to Process Control Actuators
 1 Introduction to Process Control Actuators Actuators are the final elements in a control system. They receive a low power command signal and energy input to amplify the command signal as appropriate to
1 Introduction to Process Control Actuators Actuators are the final elements in a control system. They receive a low power command signal and energy input to amplify the command signal as appropriate to
DEVELOPMENT AND APPLICATIONS OF TUNED/HYBRID MASS DAMPERS USING MULTI-STAGE RUBBER BEARINGS FOR VIBRATION CONTROL OF STRUCTURES
 13 th World Conference on Earthquake Engineering Vancouver, B.C., Canada August 1-6, 2004 Paper No. 2243 DEVELOPMENT AND APPLICATIONS OF TUNED/HYBRID MASS DAMPERS USING MULTI-STAGE RUBBER BEARINGS FOR
13 th World Conference on Earthquake Engineering Vancouver, B.C., Canada August 1-6, 2004 Paper No. 2243 DEVELOPMENT AND APPLICATIONS OF TUNED/HYBRID MASS DAMPERS USING MULTI-STAGE RUBBER BEARINGS FOR
DYNAMIC RESPONSE OF VEHICLE-TRACK COUPLING SYSTEM WITH AN INSULATED RAIL JOINT
 11 th International Conference on Vibration Problems Z. Dimitrovová et al. (eds.) Lisbon, Portugal, 9-12 September 2013 DYNAMIC RESPONSE OF VEHICLE-TRACK COUPLING SYSTEM WITH AN INSULATED RAIL JOINT Ilaria
11 th International Conference on Vibration Problems Z. Dimitrovová et al. (eds.) Lisbon, Portugal, 9-12 September 2013 DYNAMIC RESPONSE OF VEHICLE-TRACK COUPLING SYSTEM WITH AN INSULATED RAIL JOINT Ilaria
Steering unit. Table of contents. Features RE 11872/05.06. Type LAGL. Frame sizes 500 to 1000 Component series 1X Maximum flow 80 l/min
 Steering unit RE 11872/05.06 /10 Type LAGL Frame sizes 500 to 1000 Component series 1X Maximum flow 80 l/min H7375 Table of contents Contents Page Features 1 Ordering code 2 Function, section 3 Device
Steering unit RE 11872/05.06 /10 Type LAGL Frame sizes 500 to 1000 Component series 1X Maximum flow 80 l/min H7375 Table of contents Contents Page Features 1 Ordering code 2 Function, section 3 Device
Frequency Response of Filters
 School of Engineering Department of Electrical and Computer Engineering 332:224 Principles of Electrical Engineering II Laboratory Experiment 2 Frequency Response of Filters 1 Introduction Objectives To
School of Engineering Department of Electrical and Computer Engineering 332:224 Principles of Electrical Engineering II Laboratory Experiment 2 Frequency Response of Filters 1 Introduction Objectives To
AP1 Oscillations. 1. Which of the following statements about a spring-block oscillator in simple harmonic motion about its equilibrium point is false?
 1. Which of the following statements about a spring-block oscillator in simple harmonic motion about its equilibrium point is false? (A) The displacement is directly related to the acceleration. (B) The
1. Which of the following statements about a spring-block oscillator in simple harmonic motion about its equilibrium point is false? (A) The displacement is directly related to the acceleration. (B) The
BRAKE SYSTEMS 101. Energy Conversion Management. Presented by Paul S. Gritt
 Energy Conversion Management Presented by Paul S. Gritt Topics To Be Presented The Basic Concepts Hydraulic layouts Component functions Brake Balance Stopping Distance and Fade Formula SAE vs. Mini Baja
Energy Conversion Management Presented by Paul S. Gritt Topics To Be Presented The Basic Concepts Hydraulic layouts Component functions Brake Balance Stopping Distance and Fade Formula SAE vs. Mini Baja
Abaqus Technology Brief. Automobile Roof Crush Analysis with Abaqus
 Abaqus Technology Brief Automobile Roof Crush Analysis with Abaqus TB-06-RCA-1 Revised: April 2007. Summary The National Highway Traffic Safety Administration (NHTSA) mandates the use of certain test procedures
Abaqus Technology Brief Automobile Roof Crush Analysis with Abaqus TB-06-RCA-1 Revised: April 2007. Summary The National Highway Traffic Safety Administration (NHTSA) mandates the use of certain test procedures
ENERGY TRANSFER SYSTEMS AND THEIR DYNAMIC ANALYSIS
 ENERGY TRANSFER SYSTEMS AND THEIR DYNAMIC ANALYSIS Many mechanical energy systems are devoted to transfer of energy between two points: the source or prime mover (input) and the load (output). For chemical
ENERGY TRANSFER SYSTEMS AND THEIR DYNAMIC ANALYSIS Many mechanical energy systems are devoted to transfer of energy between two points: the source or prime mover (input) and the load (output). For chemical
ε: Voltage output of Signal Generator (also called the Source voltage or Applied
 Experiment #10: LR & RC Circuits Frequency Response EQUIPMENT NEEDED Science Workshop Interface Power Amplifier (2) Voltage Sensor graph paper (optional) (3) Patch Cords Decade resistor, capacitor, and
Experiment #10: LR & RC Circuits Frequency Response EQUIPMENT NEEDED Science Workshop Interface Power Amplifier (2) Voltage Sensor graph paper (optional) (3) Patch Cords Decade resistor, capacitor, and
Unit 24: Applications of Pneumatics and Hydraulics
 Unit 24: Applications of Pneumatics and Hydraulics Unit code: J/601/1496 QCF level: 4 Credit value: 15 OUTCOME 2 TUTORIAL 3 HYDRAULIC AND PNEUMATIC MOTORS The material needed for outcome 2 is very extensive
Unit 24: Applications of Pneumatics and Hydraulics Unit code: J/601/1496 QCF level: 4 Credit value: 15 OUTCOME 2 TUTORIAL 3 HYDRAULIC AND PNEUMATIC MOTORS The material needed for outcome 2 is very extensive
Airplane wing test stand for simulating the airstream. Airbus Deutschland GmbH
 Airplane wing test stand for simulating the airstream Airbus Deutschland GmbH 2 1 Airplane wing test stand for simulating the airstream Hänchen ist standard In test stands at Airbus in Bremen, Hänchen
Airplane wing test stand for simulating the airstream Airbus Deutschland GmbH 2 1 Airplane wing test stand for simulating the airstream Hänchen ist standard In test stands at Airbus in Bremen, Hänchen
Robustness to unintended ignition key rotation with key ring only
 Robustness to unintended ignition key rotation with key ring only GM North American Engineering Joe Fedullo Ali Seyam 5/6/14 Data collected 2/24/14 4/3/14 5/6/2014 Summary_5_16_14.pptx 1 Robustness to
Robustness to unintended ignition key rotation with key ring only GM North American Engineering Joe Fedullo Ali Seyam 5/6/14 Data collected 2/24/14 4/3/14 5/6/2014 Summary_5_16_14.pptx 1 Robustness to
Modeling and Simulation of Heavy Truck with MWorks
 Modeling and Simulation of Heavy Truck with MWorks Ying Sun, Wei Chen, Yunqing Zhang, Liping Chen CAD Center, Huazhong University of Science and Technology, China [email protected] Abstract This paper
Modeling and Simulation of Heavy Truck with MWorks Ying Sun, Wei Chen, Yunqing Zhang, Liping Chen CAD Center, Huazhong University of Science and Technology, China [email protected] Abstract This paper
Address for Correspondence
 International Journal of Advanced Engineering Technology E-ISSN 0976-3945 Research Paper DEVELOPMENT OF LOW COST SHAKE TABLES AND INSTRUMENTATION SETUP FOR EARTHQUAKE ENGINEERING LABORATORY C. S. Sanghvi
International Journal of Advanced Engineering Technology E-ISSN 0976-3945 Research Paper DEVELOPMENT OF LOW COST SHAKE TABLES AND INSTRUMENTATION SETUP FOR EARTHQUAKE ENGINEERING LABORATORY C. S. Sanghvi
Numerical Analysis of Independent Wire Strand Core (IWSC) Wire Rope
 Wire Rope") Numerical Analysis of Independent Wire Strand Core (IWSC) Wire Rope Rakesh Sidharthan 1 Gnanavel B K 2 Assistant professor Mechanical, Department Professor, Mechanical Department, Gojan engineering college,
Numerical Analysis of Independent Wire Strand Core (IWSC) Wire Rope Rakesh Sidharthan 1 Gnanavel B K 2 Assistant professor Mechanical, Department Professor, Mechanical Department, Gojan engineering college,
Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm
 1 Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm Hani Mehrpouyan, Student Member, IEEE, Department of Electrical and Computer Engineering Queen s University, Kingston, Ontario,
1 Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm Hani Mehrpouyan, Student Member, IEEE, Department of Electrical and Computer Engineering Queen s University, Kingston, Ontario,
Pre-Compliance Test Method for Radiated Emissions of Automotive Components Using Scattering Parameter Transfer Functions
 PreCompliance Test Method for Radiated Emissions of Automotive Components Using Scattering Parameter Transfer Functions D. Schneider 1*, S. Tenbohlen 1, W. Köhler 1 1 Institute of Power Transmission and
PreCompliance Test Method for Radiated Emissions of Automotive Components Using Scattering Parameter Transfer Functions D. Schneider 1*, S. Tenbohlen 1, W. Köhler 1 1 Institute of Power Transmission and
MECE 102 Mechatronics Engineering Orientation
 MECE 102 Mechatronics Engineering Orientation Mechatronic System Components Associate Prof. Dr. of Mechatronics Engineering Çankaya University Compulsory Course in Mechatronics Engineering Credits (2/0/2)
MECE 102 Mechatronics Engineering Orientation Mechatronic System Components Associate Prof. Dr. of Mechatronics Engineering Çankaya University Compulsory Course in Mechatronics Engineering Credits (2/0/2)
Adjustable Stiffening Device for Alpine Snow Ski
 Adjustable Stiffening Device for Alpine Snow Ski Design Team Ryan Conroy, Michael Dores, Michael Grant, Scott Kelley, Lara Taylor Design Advisor Prof. Mohammad Taslim Abstract The purpose of this project
Adjustable Stiffening Device for Alpine Snow Ski Design Team Ryan Conroy, Michael Dores, Michael Grant, Scott Kelley, Lara Taylor Design Advisor Prof. Mohammad Taslim Abstract The purpose of this project
Proportional relief valves type AGMZO-TERS, AERS two stage, with integral or remote pressure transducer, ISO 6264 size 10, 20 and 32
 www.atos.com Table F040-1/E Proportional relief valves type AGMZO-TERS, AERS two stage, with integral or remote pressure transducer, ISO 6264 size 10, 20 and 32 AGMZO are two stage poppet type proportional
www.atos.com Table F040-1/E Proportional relief valves type AGMZO-TERS, AERS two stage, with integral or remote pressure transducer, ISO 6264 size 10, 20 and 32 AGMZO are two stage poppet type proportional
POTENTIAL OF STATE-FEEDBACK CONTROL FOR MACHINE TOOLS DRIVES
 POTENTIAL OF STATE-FEEDBACK CONTROL FOR MACHINE TOOLS DRIVES L. Novotny 1, P. Strakos 1, J. Vesely 1, A. Dietmair 2 1 Research Center of Manufacturing Technology, CTU in Prague, Czech Republic 2 SW, Universität
POTENTIAL OF STATE-FEEDBACK CONTROL FOR MACHINE TOOLS DRIVES L. Novotny 1, P. Strakos 1, J. Vesely 1, A. Dietmair 2 1 Research Center of Manufacturing Technology, CTU in Prague, Czech Republic 2 SW, Universität
Swedge. Verification Manual. Probabilistic analysis of the geometry and stability of surface wedges. 1991-2013 Rocscience Inc.
 Swedge Probabilistic analysis of the geometry and stability of surface wedges Verification Manual 1991-213 Rocscience Inc. Table of Contents Introduction... 3 1 Swedge Verification Problem #1... 4 2 Swedge
Swedge Probabilistic analysis of the geometry and stability of surface wedges Verification Manual 1991-213 Rocscience Inc. Table of Contents Introduction... 3 1 Swedge Verification Problem #1... 4 2 Swedge
SITEMA PowerStroke. Technical Information TI-P11. 1 Function. 2 Applications. Mould Closing Devices series FSK. Contents
 English translation of German original Technical Information TI-P11 SITEMA PowerStroke Mould Closing Devices series FS drive system for powerful forces on a short stroke hydraulic actuation closing force
English translation of German original Technical Information TI-P11 SITEMA PowerStroke Mould Closing Devices series FS drive system for powerful forces on a short stroke hydraulic actuation closing force
HITACHI INVERTER SJ/L100/300 SERIES PID CONTROL USERS GUIDE
 HITACHI INVERTER SJ/L1/3 SERIES PID CONTROL USERS GUIDE After reading this manual, keep it for future reference Hitachi America, Ltd. HAL1PID CONTENTS 1. OVERVIEW 3 2. PID CONTROL ON SJ1/L1 INVERTERS 3
HITACHI INVERTER SJ/L1/3 SERIES PID CONTROL USERS GUIDE After reading this manual, keep it for future reference Hitachi America, Ltd. HAL1PID CONTENTS 1. OVERVIEW 3 2. PID CONTROL ON SJ1/L1 INVERTERS 3
Dynamics of Offshore Wind Turbines
 Proceedings of the Twenty-first (2011) International Offshore and Polar Engineering Conference Maui, Hawaii, USA, June 19-24, 2011 Copyright 2011 by the International Society of Offshore and Polar Engineers
Proceedings of the Twenty-first (2011) International Offshore and Polar Engineering Conference Maui, Hawaii, USA, June 19-24, 2011 Copyright 2011 by the International Society of Offshore and Polar Engineers
Braking/Traction Control Systems of a Scaled Railway Vehicle for the Active Steering Testbed
 Braking/Traction Control Systems of a Scaled Railway Vehicle for the Active Steering Testbed Min-Soo Kim and Hyun-Moo Hur Vehicle Dynamics & Propulsion System Research Department Korea Railroad Research
Braking/Traction Control Systems of a Scaled Railway Vehicle for the Active Steering Testbed Min-Soo Kim and Hyun-Moo Hur Vehicle Dynamics & Propulsion System Research Department Korea Railroad Research
Physics 11 Assignment KEY Dynamics Chapters 4 & 5
 Physics Assignment KEY Dynamics Chapters 4 & 5 ote: for all dynamics problem-solving questions, draw appropriate free body diagrams and use the aforementioned problem-solving method.. Define the following
Physics Assignment KEY Dynamics Chapters 4 & 5 ote: for all dynamics problem-solving questions, draw appropriate free body diagrams and use the aforementioned problem-solving method.. Define the following
Estimating Acoustic Performance of a Cell Phone Speaker Using Abaqus
 Estimating Acoustic Performance of a Cell Phone Speaker Using Abaqus C. Jackman 1, M. Zampino 1 D. Cadge 2, R. Dravida 2, V. Katiyar 2, J. Lewis 2 1 Foxconn Holdings LLC 2 DS SIMULIA Abstract: Consumers
Estimating Acoustic Performance of a Cell Phone Speaker Using Abaqus C. Jackman 1, M. Zampino 1 D. Cadge 2, R. Dravida 2, V. Katiyar 2, J. Lewis 2 1 Foxconn Holdings LLC 2 DS SIMULIA Abstract: Consumers
Motor Selection and Sizing
 Motor Selection and Sizing Motor Selection With each application, the drive system requirements greatly vary. In order to accommodate this variety of needs, Aerotech offers five types of motors. Motors
Motor Selection and Sizing Motor Selection With each application, the drive system requirements greatly vary. In order to accommodate this variety of needs, Aerotech offers five types of motors. Motors
Understanding Poles and Zeros
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING 2.14 Analysis and Design of Feedback Control Systems Understanding Poles and Zeros 1 System Poles and Zeros The transfer function
MASSACHUSETTS INSTITUTE OF TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING 2.14 Analysis and Design of Feedback Control Systems Understanding Poles and Zeros 1 System Poles and Zeros The transfer function
Rotation: Moment of Inertia and Torque
 Rotation: Moment of Inertia and Torque Every time we push a door open or tighten a bolt using a wrench, we apply a force that results in a rotational motion about a fixed axis. Through experience we learn
Rotation: Moment of Inertia and Torque Every time we push a door open or tighten a bolt using a wrench, we apply a force that results in a rotational motion about a fixed axis. Through experience we learn
The Basics of FEA Procedure
 CHAPTER 2 The Basics of FEA Procedure 2.1 Introduction This chapter discusses the spring element, especially for the purpose of introducing various concepts involved in use of the FEA technique. A spring
CHAPTER 2 The Basics of FEA Procedure 2.1 Introduction This chapter discusses the spring element, especially for the purpose of introducing various concepts involved in use of the FEA technique. A spring
Basic Principles in Microfluidics
 Basic Principles in Microfluidics 1 Newton s Second Law for Fluidics Newton s 2 nd Law (F= ma) : Time rate of change of momentum of a system equal to net force acting on system!f = dp dt Sum of forces
Basic Principles in Microfluidics 1 Newton s Second Law for Fluidics Newton s 2 nd Law (F= ma) : Time rate of change of momentum of a system equal to net force acting on system!f = dp dt Sum of forces
SIESMIC SLOSHING IN CYLINDRICAL TANKS WITH FLEXIBLE BAFFLES
 SIESMIC SLOSHING IN CYLINDRICAL TANKS WITH FLEXIBLE BAFFLES Kayahan AKGUL 1, Yasin M. FAHJAN 2, Zuhal OZDEMIR 3 and Mhamed SOULI 4 ABSTRACT Sloshing has been one of the major concerns for engineers in
SIESMIC SLOSHING IN CYLINDRICAL TANKS WITH FLEXIBLE BAFFLES Kayahan AKGUL 1, Yasin M. FAHJAN 2, Zuhal OZDEMIR 3 and Mhamed SOULI 4 ABSTRACT Sloshing has been one of the major concerns for engineers in
Vehicle-Bridge Interaction Dynamics
 Vehicle-Bridge Interaction Dynamics With Applications to High-Speed Railways Y. B. Yang National Taiwan University, Taiwan J. D. Yau Tamkang University, Taiwan Y. S. Wu Sinotech Engineering Consultants,
Vehicle-Bridge Interaction Dynamics With Applications to High-Speed Railways Y. B. Yang National Taiwan University, Taiwan J. D. Yau Tamkang University, Taiwan Y. S. Wu Sinotech Engineering Consultants,
Fric-3. force F k and the equation (4.2) may be used. The sense of F k is opposite
 may be used. The sense of F k is opposite") 4. FRICTION 4.1 Laws of friction. We know from experience that when two bodies tend to slide on each other a resisting force appears at their surface of contact which opposes their relative motion. The
4. FRICTION 4.1 Laws of friction. We know from experience that when two bodies tend to slide on each other a resisting force appears at their surface of contact which opposes their relative motion. The
CHAPTER 5 PREDICTIVE MODELING STUDIES TO DETERMINE THE CONVEYING VELOCITY OF PARTS ON VIBRATORY FEEDER
 93 CHAPTER 5 PREDICTIVE MODELING STUDIES TO DETERMINE THE CONVEYING VELOCITY OF PARTS ON VIBRATORY FEEDER 5.1 INTRODUCTION The development of an active trap based feeder for handling brakeliners was discussed
93 CHAPTER 5 PREDICTIVE MODELING STUDIES TO DETERMINE THE CONVEYING VELOCITY OF PARTS ON VIBRATORY FEEDER 5.1 INTRODUCTION The development of an active trap based feeder for handling brakeliners was discussed
CHAPTER 3 MODAL ANALYSIS OF A PRINTED CIRCUIT BOARD
 45 CHAPTER 3 MODAL ANALYSIS OF A PRINTED CIRCUIT BOARD 3.1 INTRODUCTION This chapter describes the methodology for performing the modal analysis of a printed circuit board used in a hand held electronic
45 CHAPTER 3 MODAL ANALYSIS OF A PRINTED CIRCUIT BOARD 3.1 INTRODUCTION This chapter describes the methodology for performing the modal analysis of a printed circuit board used in a hand held electronic
NOVEL EXAMINATION OF GUN BORE RESISTANCE ANALYSIS AND EXPERIMENTAL VALIDATION
 23 RD INTERNATIONAL SYMPOSIUM ON BALLISTICS TARRAGONA, SPAIN 16-2 APRIL 27 NOVEL EXAMINATION OF GUN BORE RESISTANCE ANALYSIS AND EXPERIMENTAL VALIDATION D. Carlucci 1, J. Vega 1, M. Pocock 2, S. Einstein
23 RD INTERNATIONAL SYMPOSIUM ON BALLISTICS TARRAGONA, SPAIN 16-2 APRIL 27 NOVEL EXAMINATION OF GUN BORE RESISTANCE ANALYSIS AND EXPERIMENTAL VALIDATION D. Carlucci 1, J. Vega 1, M. Pocock 2, S. Einstein
The Influence of Aerodynamics on the Design of High-Performance Road Vehicles
 The Influence of Aerodynamics on the Design of High-Performance Road Vehicles Guido Buresti Department of Aerospace Engineering University of Pisa (Italy) 1 CONTENTS ELEMENTS OF AERODYNAMICS AERODYNAMICS
The Influence of Aerodynamics on the Design of High-Performance Road Vehicles Guido Buresti Department of Aerospace Engineering University of Pisa (Italy) 1 CONTENTS ELEMENTS OF AERODYNAMICS AERODYNAMICS
DEVELOPMENT OF A GRIP AND THERMODYNAMICS SENSITIVE PROCEDURE FOR THE DETERMINATION OF TYRE/ROAD INTERACTION CURVES BASED ON OUTDOOR TEST SESSIONS
 DEVELOPMENT OF A GRIP AND THERMODYNAMICS SENSITIVE PROCEDURE FOR THE DETERMINATION OF TYRE/ROAD INTERACTION CURVES BASED ON OUTDOOR TEST SESSIONS Flavio Farroni, Aleksandr Sakhnevych, Francesco Timpone
DEVELOPMENT OF A GRIP AND THERMODYNAMICS SENSITIVE PROCEDURE FOR THE DETERMINATION OF TYRE/ROAD INTERACTION CURVES BASED ON OUTDOOR TEST SESSIONS Flavio Farroni, Aleksandr Sakhnevych, Francesco Timpone
HOW THE CONTAMINATION IS MEASURED CONTAMINATION CLASSES ACCORDING TO ISO 4406:1999
 CONTAMINATION CONTROL in hydraulic systems in the hydraulic system is a very wide and complex matter; the following is just a short summary. Our Customer Service is at your disposal for any further information.
CONTAMINATION CONTROL in hydraulic systems in the hydraulic system is a very wide and complex matter; the following is just a short summary. Our Customer Service is at your disposal for any further information.