(51) Int Cl.: G08G 5/00 ( )
|
|
|
- Agnes McDaniel
- 10 years ago
- Views:
Transcription
1 (19) (11) EP B1 (12) EUROPEAN PATENT SPECIFICATION (45) Date of publication and mention of the grant of the patent: Bulletin 2010/39 (51) Int Cl.: G08G 5/00 ( ) (21) Application number: (22) Date of filing: (54) Method and system to extend ADS performance metrics Verfahren und System zur Erweiterung der ADS-Leistungsmetrik Procédé et système pour étendre les mesures de performance de l ADS (84) Designated Contracting States: AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR (30) Priority: US (43) Date of publication of application: Bulletin 2008/06 (73) Proprietor: ERA Systems Corporation Reston, Virginia (US) (72) Inventors: Smith, Alexander E. McLean, Virginia (US) Cassell, Eric Burke Virginia (US) (74) Representative: Käck, Jürgen Patentanwälte Kahler Käck Mollekopf Vorderer Anger Landsberg (DE) (56) References cited: WO-A-02/ US-A US-A SMITH, A ET AL: "System Wide ADS-B Back Up and Validation" ICNS CONFERENCE AND WORKSHOP 2006, [Online] May 2006 ( ), pages 1-24, XP Baltimore, Maryland Retrieved from the Internet: URL: acast.grc.nasa.gov/icnsconf/200 6> [retrieved on ] SMITH A ET AL: "Methods to Provide System- Wide ADS-B Back-Up, Validation and Security" 25TH DIGITAL AVIONICS SYSTEMS CONFERENCE, 2006 IEEE/AIAA, IEEE, PI, 1 October 2006 ( ), pages 1-7, XP ISBN: WATSON, M: "UK ADS-B in a radar environment"[online] 2006, XP Retrieved from the Internet: URL:http: // lery/content/ public/documents/presentation s/ Session%202%20-%20Trials%20and%20Implem e ntations/watson%20-%20uk%20ads- B%20in%20a% 20radar%20environment.pdf> [retrieved on ] EP B1 Note: Within nine months of the publication of the mention of the grant of the European patent in the European Patent Bulletin, any person may give notice to the European Patent Office of opposition to that patent, in accordance with the Implementing Regulations. Notice of opposition shall not be deemed to have been filed until the opposition fee has been paid. (Art. 99(1) European Patent Convention). Printed by Jouve, PARIS (FR)
 Priority: 25.07.")
2 Description FIELD OF THE INVENTION [0001] The invention relates to the field of aircraft and ground vehicle tracking and surveillance. In particular, the present invention is related to techniques for quantifying the accuracy and backing up Automatic Dependent Surveillance (ADS) using multilateration techniques. BACKGROUND OF THE INVENTION [0002] Global implementation of Automatic Dependent Surveillance (ADS) is underway and promises to replace conventional radar surveillance (e.g., Secondary Surveillance Radar, or SSR) within the next 10 to 20 years. Switching to ADS from radar techniques represents a fundamental shift in the techniques and philosophy of aircraft tracking. [0003] In support of this transition, many aviation organizations are developing standards to ensure a proper and wellengineered transition from present radar-based systems to an ADS environment. An important part of this is the use of "Figures of Merit" or quality indicators associated with ADS solutions. ADS cannot supplant conventional radar techniques unless it can be demonstrated to be at least as accurate as prior art radar surveillance techniques. Techniques for quantifying the accuracy of ADS are thus important to the implementation of ADS to supplant radar. Techniques for measuring the accuracy of prior art radar tracking systems might not lend themselves to quantifying the accuracy of ADS. [0004] Working groups within RTCA (Radio Technical Commission for Aeronautics, RTCA, Inc., 1828 L Street, NW, Suite 805, Washington, DC 20036), EUROCAE (The European Organisation for Civil Aviation Equipment, EUROCAE, 17, rue Hamelin, Paris, FRANCE), and ICAO (International Civil Aviation Organization, ICAO, 999 University Street, Montreal, Quebec H3C 5H7, Canada) have developed performance metrics for ADS, and some standards and guidelines already exist. These developed and existing standards and guidelines include: Minimum Aviation System Performance Standards for Automatic Dependent Surveillance, RTCA 242A, dated June 25, 2002, Minimum Operational Performance Standards for 1090 MHz Extended Squitter Automatic Dependent Surveillance Broadcast (ADS-B) and Traffic Information Services Broadcast (TIS-B), RTCA 260A, 2003, which supersedes the earlier RTCA DO 260, and Safety, Performance, and Interoperability Requirements Document forads-b-nra Application, ED-126 V 1.0, December 2005, The European Organization for Civil Aviation Equipment. [0005] RTCA standards define the "Figures of Merit" or quality indicators for the system. Positional data delivered by ADS-B typically depends on Global Navigation Satellite System (GNSS) receiver data. The RTCA DO260 standards require the generation and transmission of a value called "Navigational uncertainty Category" (NUC) to all ADS-B receivers, so that receivers can determine if the data is "good enough" to use. [0006] GNSS uses satellite-positioning techniques to provide users with accurate and timely navigation information. A Global Positioning System (GPS) is a subset of a global navigation satellite system because a GPS system needs only to provide the ability to determine position information. GNSS also provides real time navigation information. In order to use GNSS for navigation, it must be possible to generate real-time navigation information fast enough for safe navigation. [0007] When DO 260 was revised as 260A, NUC was specified in terms of NIC, NAC and SIL, defined as follows. Navigation Accuracy Category (NAC) is reported so that the surveillance application may determine whether the reported position has an acceptable level of accuracy for the intended application. Navigation Integrity Category (NIC) is reported so that the surveillance application may determine whether the reported position has an acceptable level of integrity for the intended application. Surveillance Integrity Level (SIL) is the probability that the integrity containment radius used in the NIC parameter will be exceeded. [0008] Each of the parameters can be further subdivided for position and velocity (e.g., NUCp and NUCv). For a complete definition of each of these parameters please refer to RTCA DO 240A. From DO 240A, NIC, NAC, and SIL values are as presented in Tables 1-5 below. [0009] Table 1 lists NIC values from 0 to 11 for a broad range of applications, ranging from lowest integrity (0) to highest integrity (11). Table 2 lists NAC values from lowest accuracy applications to highest application applications (i.e., LAAS or precision landing). Table 2 and Table 3 list separately the requirements for accuracy in position or velocity. Accuracy requirements are specified as 2 sigma, or 95%, meaning that 95% of the time the accuracy shall be better than that specified for each NAC value in the tables. Table 4 contains the integrity requirement, which is the probability that the target will exceed a predetermined containment radius. Table 5 contains a quality indicator that relates to aircraft barometric altimetry system performance. [0010] A good discussion and definition of Required Navigation Performance (RNP) procedures may be found in the following documents: 2
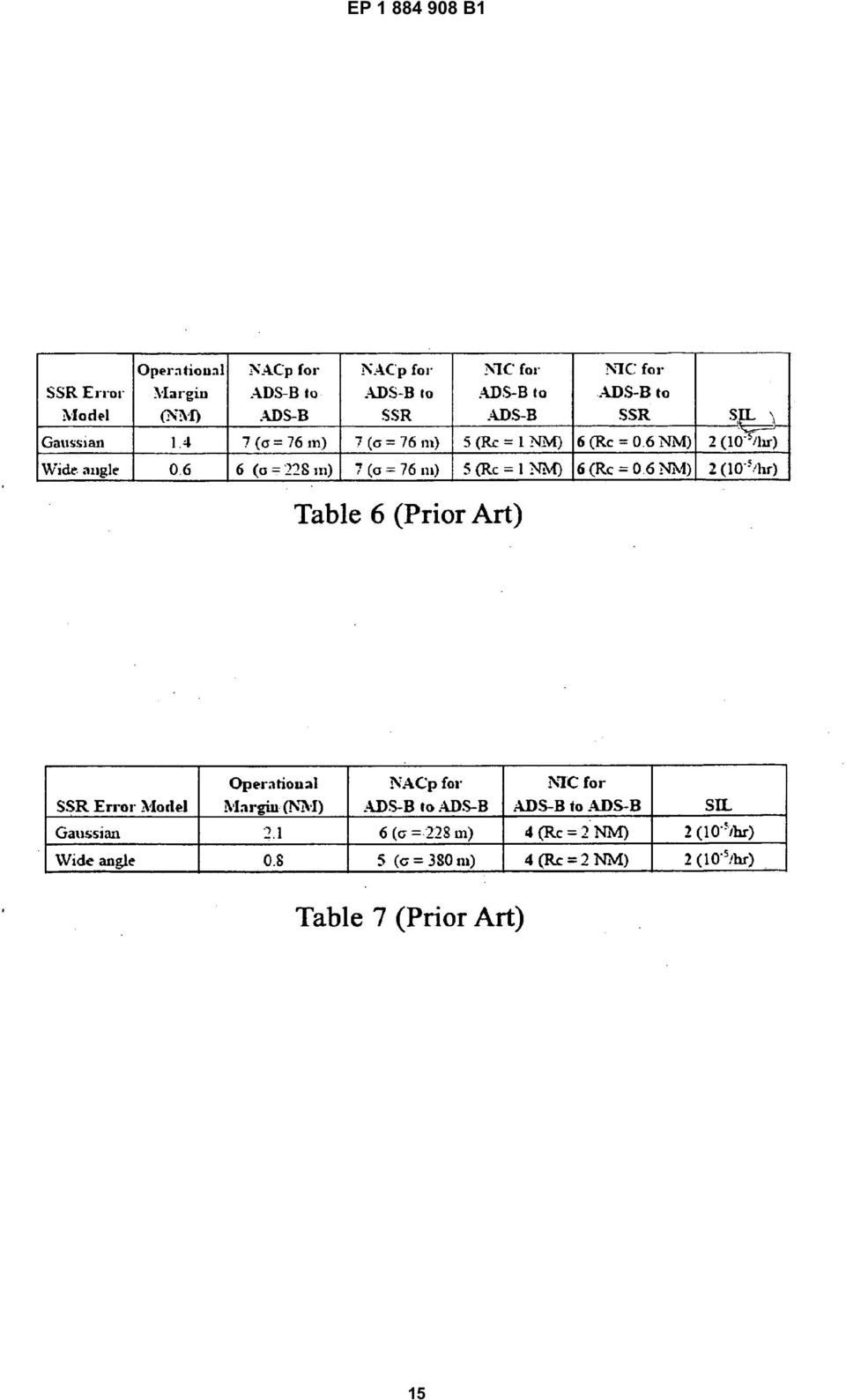
![BACKGROUND OF THE INVENTION [0002] Global implementation of Automatic Dependent Surveillance (ADS) is underway and promises to replace conventional radar surveillance (e.g.](/docs-images/41/770058/images/page_2.jpg ", Secondary Surveillance Radar, or SSR) within the next 10 to 20 years. Switching to ADS from radar techniques represents a fundamental shift in the techniques and philosophy of aircraft tracking.")
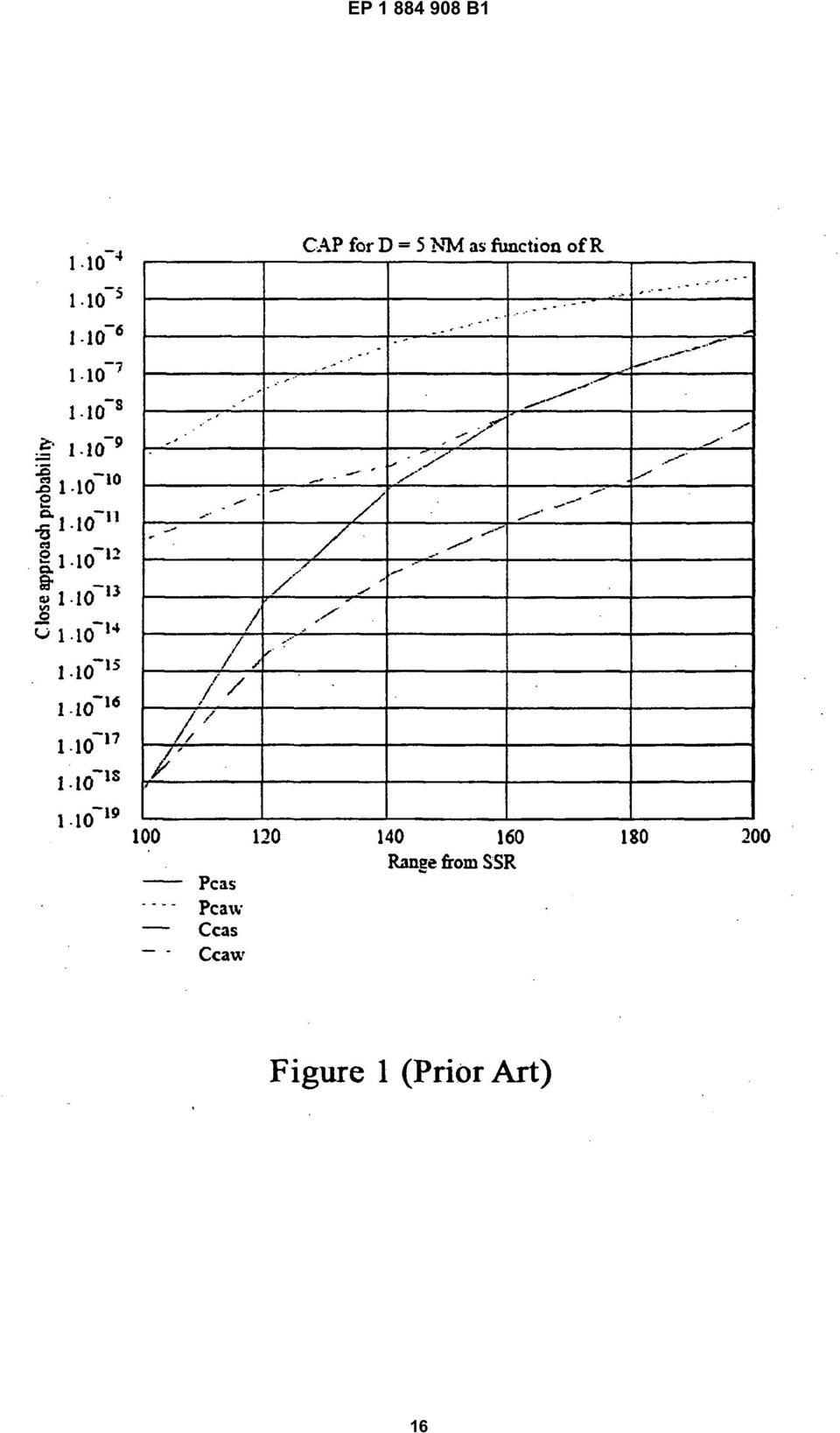
3 [0011] ED-126 contains an assessment of ADS-B to Secondary Surveillance Radar (SSR) target separation requirements, and results of risk evaluations are shown in Table 6 and Table 7 from the EUROCAE document. As in the case of long range SSR to SSR separation, the relatively wide cross-range radar error distribution limits ADS-B effectiveness in supporting the above minimum required separation values of 2.9 NM or 4.2 NM. [0012] Assurance that ADS-B based surveillance risk is at least as good as that of radar when separating ADS-B targets from radar targets requires defining ADS-B requirements so they are at least the Close Approach Probability (CAP) level obtained for radar to radar 5 NM separation. Using conservative values of NACp = 6 and NIC = 4 for ADS- B performance, and defining the radar cross-range error distribution, we get the results (Ccax where "x" is "s" or "w" depending on the Gaussian or wide angle error model) plotted in Figure 1 in comparison to the reference values (Pcax) for SSR to SSR separation. Although ADS-B provides improved capability over the SSR baseline for the Gaussian SSR case, the SSR wide-angle errors at long ranges for the alternate assumption limit the incremental effectiveness of ADS- B in this case. [0013] As defined by ED 126, the Close Approach Probability (CAP) is the probability that, when the surveillance positions of two aircraft appear to be separated by a distance S, their true separation is actually within a distance A (the size of an aircraft and typically 200ft is used) (1 ft = 30,48 cm). The CAP is calculated from the assumed surveillance error distribution function (i.e. from the probability density function of the errors). In the case of radar, the position error distribution is taken for azimuth errors (cross-range errors) projected at the limit of the range of applicability of the separation minima (S). Ideally, the error distribution is determined from the analysis of real radar measurements. Note that this error distribution is for the normal operation of the radar in its particular environment with no radar equipment fault conditions (but including the tail errors caused by environmental effects). It is assumed that all the radar errors in the distribution are undetected by the radar. [0014] If the position error distribution of a new surveillance system is known (from measurements and/or analytical predictions) then the surveillance risk can be calculated and compared to the reference radar system. Also, the surveillance risk between an aircraft position measured by existing radar and another measured by the new source of surveillance can be calculated. [0015] In the case of (Automatic Dependent Surveillance, Broadcast) ADS-B, a quality indicator will qualify the expected accuracy of the ADS-B reported position and some integrity checking of the position is expected in conjunction. However, there may be some probability of not detecting position errors outside certain bounds and these errors will contribute to the overall undetected ADS-B position error distribution. [0016] The above analyses show differences in SSR and ADS-B performance and essentially compare the performance metrics from both systems, which have quite different error mechanisms. The same type of analysis could be applied to multilateration and scenarios could be presented for comparing multilateration to SSR and ADS-B, as well as other technologies. [0017] If ADS-B is to supplant SSR as a primary source of aircraft surveillance, some sort of a back-up and/or validation may be required. Many air traffic authorities recognize the need for a back-up to ADS-B and it is becoming a more common theme in aviation conferences worldwide, for example at ATCA conferences ( Maastricht ATC conferences ( and Helios conferences and seminars ( [0018] Surveillance alternatives generally considered for application as a back-up to ADS-B include: Multilateration Primary radar Secondary Surveillance Radar (SSR) Passive SSR Passive Primary Radar Other techniques including ADS-B angle of arrival from phase measurements (e.g., multi-sector antennas). [0019] While aviation authorities worldwide discuss the idea of a back-up as redundant forms of surveillance, or as interoperable forms of surveillance, there is no existing methodology to combine the different sources of surveillance into an overall surveillance service with a common set of performance metrics. For example, in the United States, the Federal Aviation Administration (FAA) has revealed ambitious plans to commence with a national ADS-B program ( The FAA is interested in back-up surveillance, and will currently consider performance-based approaches, which are not technology specific. However, in the Prior Art, there exists no methodology to combine data from different surveillance sources, based on the categorized quality of data [0020] SSR and ADS-B have different methodologies for tracking aircraft. However, as noted above, performance 3

4 5 10 metrics for ADS-B have been established such that the accuracy and integrity of an ADS-B system can be readily determined. Back-up methodologies may require similar accuracy and integrity standards. However, again, since the methodologies differ in their underlying technology, creating equivalent metrics for monitoring such back-up systems may be difficult. Thus, it remains a requirement in the art to provide a system and method for monitoring and measuring metrics of a back-up methodology such as multilateration and presenting such metrics in the same or similar terms as ADS-B metrics. [0021] US A1 discloses a method and an apparatus to improve ADS-B security. This document discloses techniques which uses other data sources to validate the annunciated position of an aircraft and to validate the annunciated identity of an aircraft as reported by ADS-B. [0022] Another aircraft position monitoring system is disclosed in US 5,381,140. The system is capable of realizing simple tracking processing in real-time, continuous aircraft navigation, while effectively utilizing FOM data and preventing an increase in data processing amount, thereby coping with the increasing traffic volume and ensuring navigation safety SUMMARY OF THE INVENTION [0023] The invention is defined in claims 1 and 10, respectively. Particular embodiments of the invention are set out in the dependent claims. [0024] In the present invention, ADS-B is used as the preferred primary means of surveillance with multilateration as the secondary, or a back-up means of surveillance. An aircraft transmits various transponder-based or other signals, including ADS-B signals, which may be 1090 MHz or other frequencies. These signals are received at multiple ground stations, some of which may be ADS-B stations or both ADS-B and multilateration stations. [0025] ADS-B signals may contain all of the performance metrics, Navigation Accuracy Category (NAC), Navigation Integrity Category (NIC), Surveillance Integrity Level (SIL) and Barometric Altitude Quality (BAQ), which are passed on from ADS-B station to an ADS-B processor. The ADS-B processor then outputs aircraft-derived metrics NIC, NAC, SIL, BAQ. ADS-B signals and all other transponder signals are also received at all ground stations, time-stamped, and sent to a multilateration processor. The multilateration processor may then generate Surveillance Integrity Category (SIC), Surveillance Integrity Level (SIL) and pass on Barometric Altitude Quality (BAQ) information. [0026] Therefore two streams of information are passed onto ATC system processor containing the ADS-B aircraftderived metrics NIC, NAC, SIL, BAQ and the multilateration-derived metrics SIC, SAC, SIL, and BAQ. The ATC system processor may then be configured to pass along both sets of messages to the ATC system, or to select a combination or fusion of the best metrics and tracking information for an aircraft. [0027] The performance of ADS-B as discussed above is determined by the performance of the navigation system (e.g., GNSS, GPS) and other on board aircraft sensors, whereas the performance of the surveillance system is dependent upon the ground-based infrastructure, such as SSR, Radar or multilateration. Thus, performance of the surveillance system is not dependent upon aircraft mounted hardware, which is not within the control of the airport operator or other user. As the two systems rely upon different hardware, one makes a good back-up for the other. However, since the technologies used are different in nature, comparing the metrics (performance parameters, accuracy, and the like) can be difficult. The present invention solves this problem by providing comparable metrics for both systems. Thus, an ATC system can evaluate the metrics of both systems and determine which is the more accurate of the two, or detect errors in a particular system. BRIEF DESCRIPTION OF THE DRAWINGS AND TABLES [0028] Table 1 lists NIC values from 0 to 11 for a broad range of applications, ranging from lowest integrity (0) to highest integrity (11). [0029] Table 2 lists NAC values from lowest accuracy applications to highest application applications (i.e., LAAS or precision landing). [0030] Table 3 lists the NAC values in velocity. [0031] Table 4 defines the integrity levels, which are the probability that the target will exceed a predetermined containment radius. [0032] Table 5 contains a quality indicator that relates to the aircraft s barometric altimetry system performance. [0033] Table 6 tabulates the results of risk evaluations from an assessment of ADS-B to Secondary Surveillance Radar (SSR) target separation requirements. [0034] Table 7 tabulates the results of risk evaluations from an assessment of ADS-B to Secondary Surveillance Radar (SSR) target separation requirements. [0035] Table 8 illustrates ADS-B supplemented with Multilateration. [0036] Table 9 summarizes the requirements along with the linear values based on distance for Radar Performance accuracy specified for the FAA s newest Radar system the Air Traffic Control Beacon Interrogator model six (ATCBI-6). 4

5 [0037] Table 10 summarizes results of a performance assessment was made of the Ohio Valley multilateration configuration. [0038] Table 11 summarizes the results for both terminal and en route applications, comparing the requirements for each application to actual MANLAT performance. [0039] Figure 1 is a plot, using conservative values of NACp = 6 and NIC = 4 for ADS-B performance, and defining the radar cross-range error distribution, of Close Approach Probability (Ccax where "x" is "s" or "w" depending on the Gaussian or wide angle error model) plotted in in comparison to the reference values (Pcax) for SSR to SSR separation. [0040] Figure 2 is a block diagram illustrating the methodology of the present invention using ADS-B as the preferred primary means of surveillance with multilateration as the secondary, or as a back-up means of surveillance. [0041] Figure 3 indicates jet routes above 18,000 feet in the example area in the Ohio Valley where the en route coverage area is approximately 125,000 square miles (1 square mile = km 2 ). [0042] Figure 4 is a diagram illustrating predicted accuracy at 18,000 feet with the geometry from the existing sensor layout, with one sensor failed in each airport system, or a total of 4 failed sensors. [0043] Figure 5 is a diagram illustrating predicted accuracy at a 4,000 ft altitude for terminal operations, showing 60 mile radius required coverage in each of the four airport terminal areas. [0044] Figure 6 illustrates the calculated DOP calculations for the geometry of the solution at 20,000 feet showing the accuracy of the surveillance solution. [0045] Figure 7 illustrates the calculated DOP calculations for the geometry of the solution at 10,000 feet showing the accuracy of the surveillance solution. DETAILED DESCRIPTION OF THE INVENTION [0046] In the Prior Art, ADS-B metrics are based on aircraft reporting of quality due in large part to the aircraft-determined quality of the navigation sources, hence the use of "N" for navigation integrity and accuracy metrics. The surveillancebased approach of the present invention does not rely upon on-board aircraft navigation information (e.g., GPS, inertial navigation, or the like), and would therefore be separate and independent from that data. To distinguish the different sources it may be useful to consider different nomenclature, such as "S" for surveillance-derived metrics, as indicated in Table 8, which illustrates ADS-B supplemented with Multilateration. [0047] Figure 2 is a block diagram illustrating the methodology of the present invention using ADS-B as the preferred primary means of surveillance with multilateration as the secondary, or a back-up means of surveillance. Aircraft 100 transmits various transponder-based or other signals 110, including ADS-B signals, which may be 1090 MHz or other frequencies. Signals 110 are received at multiple ground stations, some of which may be ADS-B stations 210 or both ADS-B and multilateration stations 200. [0048] ADS-B signals 110 may contain all of the performance metrics, Navigation Accuracy Category (NAC), Navigation Integrity Category (NIC), Surveillance Integrity Level (SIL) and Barometric Altitude Quality (BAQ), which are passed on 260 from ADS-B station 210 to ADS-B processor 300. ADS-B processor then outputs aircraft-derived metrics NIC, NAC, SIL, and BAQ 350. ADS-B signals 110 and all other transponder signals are also received at all ground stations 200, 210, time-stamped, and sent 250 to multilateration processor 310. Multilateration processor 310 may then generate SIC, SAC, SIL, and pass on BAQ information 360. [0049] Therefore two streams of information are passed onto ATC system processor 400 containing the ADS-B aircraftderived metrics NIC, NAC, SIL, and BAQ 350 and the multilateration-derived metrics SIC, SAC, SIL, and BAQ 360. [0050] ATC system processor 400 may then be configured to pass along both sets of messages 410 to the ATC system, or to select a combination or fusion of the best metrics and tracking information for aircraft 110. [0051] The performance of ADS-B as discussed above is determined by the performance of the navigation system (e.g., GNSS, GPS) and other on board aircraft sensors, whereas the performance of the surveillance system is dependent upon the ground-based infrastructure, such as SSR, Radar or multilateration. Thus, performance of the surveillance system is not dependent upon aircraft mounted hardware, which is not within the control of the airport operator or other user. As the two systems rely upon different hardware, one makes a good back-up for the other. However, since the technologies used are different in nature, comparing the metrics (performance parameters, accuracy, and the like) can be difficult. The present invention solves this problem by providing comparable metrics for both systems. Thus, an ATC system can evaluate the metrics of both systems and determine which is the more accurate of the two, or detect errors in a particular system. The alternate surveillance data metrics also allow determination of appropriate aircraft separation criteria to be applied. [0052] Radar Performance accuracy specified for the FAA s newest Radar system the Air Traffic Control Beacon Interrogator model six (ATCBI-6), contained in FAA ACTBI-6 Specification, FAA-E-2923, 9/10/97, is as follows. Range Accuracy is defined as a Range Bias of + 30 ft, and a Range Jitter Standard Deviation (SD) of 25 ft. Azimuth Accuracy is defined as a Bias of degrees, and a Jitter SD of degrees. The requirements are summarized in Table 9, along with the linear values based on distance. Terminal area accuracy is based on 60 NM, and en route accuracy 5
![[0039] Figure 1 is a plot, using conservative values of NACp = 6 and NIC = 4 for ADS-B performance, and defining the radar cross-range error distribution, of Close Approach Probability (Ccax where](/docs-images/41/770058/images/page_5.jpg "\"x\" is \"s\" or \"w\" depending on the Gaussian or wide angle error model) plotted in in comparison to the reference values (Pcax) for SSR to SSR separation.")
6 is based on 250 NM. The RMS values are determined based on summing the bias and jitter as follows: [0053] The azimuth RMS accuracy is deg, the same as specified for the Airport Surveillance Radar, Model 9 (ASR-9), and close to the Air Route Surveillance Radar, Model 3 and Model 4 (ARSR-3 and ARSR-4) requirements as contained in National Airspace System Specification - NAS-SS-1000, FAA, May The azimuth accuracy, converted to a linear value may be used as the minimum requirement to be applied to Wide Area Multilateration (WAMLAT). Based on this, the accuracy requirements for a back-up surveillance system may be +320m for terminal area and +1333m for en route surveillance. [0054] The minimum update rates are 4.8 seconds for terminal area and 12 seconds for en route. The update requirements also include a minimum probability of detection. For the ATCBI-6 this is specified to be 98%. The ACTBI-6 specification specifies the rate of false target detection to be less than 1 in 400. The ADS-B standards are defined such that the probability of an undetected error in a single report is less than 10-6 per message, as specified in DO-242A, Minimum Aviation System Performance Standards for ADS-B, RTCA, June 25, Since multilateration is considered to be a backup to ADS-B the latter should be a goal as the integrity requirement. [0055] Availability requirements are specified by the FAA for individual surveillance systems, and are also defined in the overall NAS specification. For terminal area surveillance the most relevant requirements are for the ATCBI-6 and the Mode-S, both of which are specified to be For en route surveillance the most relevant requirements are for the ARSR-3 and ARSR-4, both of which are specified to be [0056] Multilateration performance also needs to be quantified to compare the accuracy with Prior Art surveillance systems. By way of an example, an assessment is made of the potential coverage and accuracy available from multilateration systems implemented by Rannoch Corporation, assignee of the present application. Rannoch has many systems deployed worldwide for a variety of applications including military, commercial, and air traffic control, and in certain areas in the United States there are multiple systems that may be considered as part of a regional network. [0057] The example shown in Figure 3 is from the Ohio Valley, where there are four systems implemented at Louisville International Airport, Ohio State University, Cincinnati Lunken Municipal Airport, and Indianapolis International Airport. Each system is made up of five sensors, where one is on-airfield and four are off-airfield. When combined together, a wide area regional network of 20 sensors can be considered from this particular example. [0058] It should be noted that the four systems are sited to provide terminal area coverage, and are not optimized for en route surveillance over longer distances. Nevertheless this analysis will show the possible performance for en route surveillance, even when ground system sites are not necessarily at optimum locations for en route coverage. [0059] Coverage is met when the required accuracy is sufficient. Figure 3 indicates jet routes above 18,000 feet, and the en route coverage area is approximately 125,000 square miles. With the geometry from the existing sensor layout, the predicted accuracy at 18,000 feet altitude is shown in Figure 4. This performance is calculated with one sensor failed in each airport system, or a total of 4 failed sensors. This is one assumption used in the availability assessment. Figure 5 shows predicted accuracy at a 4,000 ft altitude for terminal operations, showing a 60 mile radius required coverage in each of the four airport terminal areas. Again, the multilateration network is estimated to meet or exceed required surveillance accuracy throughout these areas. [0060] System update rate is a function of the number of sensors in a coverage zone and probability of reception for each multilateration receiver. An update typically requires that three sensors receive and successfully decode the aircraft transponder transmissions. For Mode S transponders a conservative analysis would assume that only squitters, nominally transmitted once per second, are available for multilateration. A performance assessment was made of the Ohio Valley multilateration configuration. The results are shown in Table 10. [0061] The results in Table 10 show that the multilateration system easily meets the required update rates for both terminal and en route coverage. The reason for the significant margin is that multilateration typically achieves good update performance within one second, while the terminal and en route requirements are 4.8 seconds and 12 seconds, respectively. Both regions were evaluated with a five second update. It was also assumed that one sensor in each airport system could be failed while still meeting the update requirements. [0062] As previously indicated, the goal for multilateration should be the ADS-B message integrity, which is a probability of an undetected error less than 10-6 per message. This is allocated to two different requirements related to multilateration - false target detection and false identification. Both are integrity related parameters. Achieving a low probability of false target detection is a function of proper sensor location and processing techniques to detect erroneous measurements. These ensure that the probability of false target detection is less than 10-6 per update. The likelihood of false identification is minimized in a similar manner. A primary element here is the use of 24-bit parity for Mode S transmissions, which ensures that the probability of an undetected error is less than 10-7 per message. 6
.")
7 [0063] Multilateration availability is a function of the reliability and level of redundancy, both in the central processing equipment and the sensors. For this assessment it was assumed that the central processing equipment has dual redundancy. The sensor configuration is such that a minimum of one sensor can fail in each airport system, without affecting performance. Another key assumption in assessing availability is the repair time following a failure. Typically this is assumed to be 0.5 hours for operational NAS systems. For this analysis it was assumed to be 8 hours, taking into account the system is a back-up and therefore should not require immediate repair. The results in Table 11 indicate that multilateration easily meets the requirements for both terminal and en route surveillance. As indicated in the discussion of the availability requirement, it is possible that a back-up system could have reduced availability. If that were the case the tradeoff could be made between the repair time following failures and overall availability, which would minimize the maintenance costs of the back-up system. [0064] As previously noted, RTCA standards define the Figures of Merit or quality indicators for the system. When DO 260 was revised as 260A, NUC was specified in terms of NIC, NAC and SIL. Navigation Accuracy Category (NAC) is reported so that the surveillance application may determine whether the reported position has an acceptable level of accuracy for the intended application. In other words, the accuracy is based on the quality of the navigation information available to the aircraft, whether it is based on ground-based navigational aids or satellite systems. [0065] For a ground-based equivalent, the following example of a wide area multilateration system is provided, using a distributed site across the Taiwan Strait from Kinmen Island to Peng Hu Island. If this ground-based infrastructure were to be used as an alternative or supplement to the aircraft s reported navigation position, the determining factor for accuracy (surveillance or navigation) is Dilution of Precision (or DOP as it is commonly called in satellite navigation). For the example here, a number of sensors were installed on the two islands across the Taiwan Strait. Six sensors were located at Kinmen Island (with two ATC centers) in the North East and two sensors were located on Peng Hu Island in the South West, connected via leased digital lines to Kinmen Island. [0066] Figure 7 illustrates the calculated DOP calculations for the geometry of the solution at 20,000 feet and 10,000 feet, respectively, showing the accuracy of the surveillance solution is shown as < 25 meters, meters, meters, and so on. This is an example of the use of surveillance from a ground-based infrastructure that may be used in lieu of an aircraft s reported navigation quality. As illustrated in Figures 7 and 8, the accuracy in the primary area of interest (between the two islands, where flight and approach paths are most common) is within 25 meters at both altitude levels. Accuracy outside of these areas drops off, however since these areas are not within the primary approach paths, increased accuracy may not be required. Increased accuracy could be easily obtained by adding additional sensors at other islands or even on floating buoys. [0067] While the preferred embodiment and various alternative embodiments of the invention have been disclosed and described in detail herein, it may be apparent to those skilled in the art that various changes in form and detail may be made therein without departing from the scope thereof Claims 1. A system for measuring and monitoring performance metrics of a nozt-ads-b tracking system and generating performance metrics for the non-ads-b tracking system in terms of ADS-B equivalent performance metrics, the system comprising: a plurality of ground station receivers (200, 210) for receiving from a vehicle (100), signals (110) including ADS- B signals, the plurality of ground station receivers (200, 210) comprising at least ADS-B stations (210), and alternate tracking system stations (200); an ADS-B processor (300), coupled to at least a portion of the plurality of ground stations (200, 210), for deriving aircraft-derived ADS-B metrics (350) from the ADS-B signals; and an alternate tracking system processor (310), coupled to at least a portion of the plurality of ground stations (200, 210) for receiving tracking data from the alternate tracking system stations (200), determining vehicle position from the tracking data to generate an alternate tracking system vehicle position, and generating metrics (360) from the alternate tracking system vehicle position in equivalent ADS-B metrics formats characterized by a system processor (400) for receiving ADS-B metrics (350) from the ADS-B processor (300) and alternate tracking system metrics (360) from the alternate tracking system processor (310), the system processor (400) performing at least one of selecting and fusing tracking data based upon the ADS-B and alternate tracking system metrics (350,300), wherein the system processor (400) evaluates metrics of both ADS-B and the alternate tracking system and determines which is the more accurate of the two, and detects errors in one of the ADS-B and alternate tracking systems. 7

8 2. The system of claim 1, wherein the alternate tracking system stations further include ADS-B tracking system stations. 3. The system of claim 2, wherein the system processor (400) is an Air Traffic Control (ATC) system processor The system of claim 1, wherein the ATC system applies alternate surveillance data metrics to determine appropriate aircraft separation criteria. 5. The system of claim 3, wherein the ADS-B signals contain at least one or more of performance metrics, Navigation Accuracy Category (NAC), Navigation Integrity Category (NIC), Surveillance Integrity Level (SIL) and Barometric Altitude Quality (BAQ), which is passed on from the ADS-B stations (210) to an ADS-B processor (300). 6. The system of claim 5, wherein the ADS-B processor (300) outputs at least one or more of aircraft-derived metrics NIC, NAC, SIL, and BAQ to the ATC processor The system of claim 6, wherein the alternate tracking system processor (310) generates at least one or more of Surveillance Integrity Category (SIC), Surveillance Integrity Level (SIL) and Barometric Altitude Quality (BAQ), metrics information. 8. The system of claim 7, wherein the alternate tracking system processor (310) outputs at least one or more of surveillance-derived metrics SIC, SIL, and BAQ to the ATC processor The system of claim 1, wherein the alternate tracking system includes one or more of multilateration, primary radar, secondary Surveillance Radar (SSR), Passive SSR, Passive primary radar, ADS-B angle of arrival from phase measurements. 10. A method for measuring and monitoring performance metrics of a non-ads-b tracking system and generating performance metrics for the non-ads-b tracking system in terms of ADS-B equivalent performance metrics, the method comprising the steps of: receiving in a plurality of ground station receivers (200, 210), signals (110) from a vehicle (100) including ADS- B signals, the plurality of ground station receivers (200, 210) comprising at least ADS-B stations (210), and alternate tracking system stations (200); deriving, in an ADS-B processor (300), coupled to at least a portion of the plurality of ground stations (200, 210), aircraft-derived ADS-B metrics (350) from the ADS-B signals; and receiving tracking data from the alternate tracking system stations (200) and determining vehicle position from the tracking data in an alternate tracking system processor (310), coupled to at least a portion of the plurality of ground stations (200, 210), generating an alternate tracking system vehicle position, and generating metrics (360) from the alternate tracking system vehicle position in equivalent ADS-B metrics formats characterized by receiving, in a system processor (400), ADS-B metrics (350) from the ADS-B processor (300) and alternate tracking system metrics (360) from the alternate tracking system processor (310), the system processor (400) performing at least one of selecting and fusing tracking data based upon the ADS-B and alternate tracking system metrics (350, 360), wherein the system processor (400) evaluates metrics of both ADS-B and the alternate tracking systems and determines which is the more accurate of the two, and detects errors in one of the ADS-B and alternate tracking systems. 11. The method of claim 10, wherein the alternate tracking system stations further include ADS-B tracking system stations. 12. The method of claim 11, wherein the system processor (400) is an Air Traffic Control (ATC) system processor. 13. The method of claim 10, wherein the ATC system applies alternate surveillance data metrics to determine appropriate aircraft separation criteria. 14. The method of claim 12, wherein the ADS-B signals contain at least one or more of performance metrics, Navigation Accuracy Category (NAC), Navigation Integrity Category (NIC), Surveillance Integrity Level (SIL) and Barometric Altitude Quality (BAQ), which is passed on from the ADS-B stations (210) to an ADS-B processor (304). 8
, Navigation Integrity Category (NIC), Surveillance Integrity")
9 15. The method of claim 14, wherein the ADS-B processor (300) outputs at least one or more of aircraft-derived metrics NIC, NAC, SIL, and BAQ to the ATC processor (400) The method of claim 15, wherein the alternate tracking system processor (310) generates at least one or more of Surveillance Integrity Category (SIC), Surveillance Integrity Level (SIL) and Barometric Altitude Quality (BAQ), metrics information The method of claim 16, wherein the alternate tracking system processor (310) outputs at least one or more of surveillance-derived metrics SIC, SIL, and BAQ to the ATC processor (400). 18. The method of claim 10, wherein the alternate tracking system includes one or more of multilateration, primary radar, secondary Surveillance Radar (SSR), Passive SSR, Passive primary radar, ADS-B angle of arrival from phase measurements Patentansprüche 1. System zum Messen und Überwachen von Leistungsmetriken eines Nicht-ADS-B-Verfolgungssystems und zum Erzeugen von Leistungsmetriken für das Nicht-ADS-B-Verfolgungssystem hinsichtlich ADS-B-äquivalenter Leistungsmetriken, wobei das System aufweist: eine Vielzahl von Bodenstationsempfängern (200, 210) zum Empfangen von Signalen (110), einschließlich ADS-B-Signalen, von einem Fahrzeug (100), wobei die Vielzahl von Bodenstationsempfängern (200, 210) zumindest ADS-B-Stationen (210) und Stationen (200) eines alternativen Verfolgungssystems aufweist; einen mit zumindest einem Teil der Vielzahl von Bodenstationen (200, 210) gekoppelten ADS-B-Prozessor (300) zum Ableiten von von einem Flugzeug stammenden ADS-B-Metriken (350) aus den ADS-B-Signalen; und einen mit zumindest einen Teil der Vielzahl von Bodenstationen (200, 210) gekoppelten Prozessor (310) eines alternativen Verfolgungssystems zum Empfangen von Verfolgungsdaten von den Stationen (200) des alternativen Verfolgungssystems, zum Ermitteln einer Fahrzeugposition aus den Verfolgungsdaten, um eine Fahrzeugposition des alternativen Verfolgungssystems zu erzeugen, und zum Erzeugen von Metriken (360) aus der Fahrzeugposition des alternativen Verfolgungssystems in äquivalenten ADS-B-Metrikformaten, gekennzeichnet durch einen Systemprozessor (400) zum Empfangen von ADS-B-Metriken (350) vom ADS-B-Prozessor (300) und Metriken (360) des alternativen Verfolgungssystems vom Prozessor (310) des alternativen Verfolgungssystems, wobei der Systemprozessor (400) mindestens eines von Auswählen und Vereinigen von Verfolgungsdaten auf der Basis der ADS-B-Metriken und der Metriken des alternativen Verfolgungssystems (350, 360) durchführt, wobei der Systemprozessor (400) Metriken sowohl des ADS-B- als auch des alternativen Verfolgungssystems auswertet und feststellt, welches der beiden das genauere ist, und Fehler in einem des ADS-B- und des alternativen Verfolgungssystems erkennt. 2. System nach Anspruch 1, wobei die Stationen des alternativen Verfolgungssystems ferner ADS-B-Verfolgungssystemstationen aufweisen. 3. System nach Anspruch 2, wobei der Systemprozessor (400) ein Flugsicherungs-(ATC) Systemprozessor ist. 4. System nach Anspruch 1, wobei das ATC-System alternative Überwachungsdatenmetriken anwendet, um geeignete Flugzeugabstandskriterien festzulegen. 5. System nach Anspruch 3, wobei die ADS-B-Signale mindestens eine oder mehrere Leistungsmetriken, Navigationsgenauigkeitskategorie (NAC), Navigationsintegritätskategorie (NIC), Überwachungsintegritätsniveau (SIL) und Qualität der barometrischen Höhe (BAQ) enthalten, die von den ADS-B-Stationen (210) zu einem ADS-B-Prozessor (300) weitergeleitet werden System nach Anspruch 5, wobei der ADS-B-Prozessor (300) mindestens eine oder mehrere der von einem Flugzeug stammenden Metriken NIC, NAC, SIL und BAQ an den ATC-Prozessor ausgibt. 7. System nach Anspruch 6, wobei der Prozessor (310) des alternativen Verfolgungssystems mindestens eine oder mehrere der Metrikinformationen der Überwachungsintegritätskategorie (SIC), des Überwachungsintegritätsni- 9
 outputs at least one or more of surveillance-derived metrics SIC, SIL, and BAQ to the ATC processor (400). 18.")
10 veaus (SIL) und der Qualität der barometrischen Höhe (BAQ) erzeugt System nach Anspruch 7, wobei der Prozessor (310) des alternativen Verfolgungssystems mindestens eine oder mehrere der von der Überwachung stammenden Metriken SIC, SIL und BAQ an den ATC-Prozessor ausgibt. 9. System nach Anspruch 1, wobei das alternative Verfolgungssystem eines oder mehrere von Multilateration, Primärradar, Sekundärüberwachungsradar (SSR), passivem SSR, passivem Primärradar, ADS-B-Ankunftswinkel aus Phasenmessungen aufweist. 10. Verfahren zum Messen und Überwachen von Leistungsmetriken eines Nicht-ADS-B-Verfolgungssystems und zum Erzeugen von Leistungsmetriken für das Nicht-ADS-B-Verfolgungssystem hinsichtlich ADS-B-äquivalenter Leistungsmetriken, wobei das Verfahren die folgenden Schritte aufweist: Empfangen von Signalen (110), einschließlich ADS-B-Signalen, von einem Fahrzeug (100) in einer Vielzahl von Bodenstationsempfängern (200, 210), wobei die Vielzahl von Bodenstationsempfängern (200, 210) zumindest ADS-B-Stationen (210) und Stationen (200) eines alternativen Verfolgungssystems aufweist; Ableiten von von einem Flugzeug stammenden ADS-B-Metriken (350) aus den ADS-B-Signalen in einem ADS- B-Prozessor (300), der mit zumindest einem Teil der Vielzahl von Bodenstationen (200, 210) gekoppelt ist; und Empfangen von Verfolgungsdaten von den Stationen (200) des alternativen Verfolgungssystems und Ermitteln einer Fahrzeugposition aus den Verfolgungsdaten in einem Prozessor (310) des alternativen Verfolgungssystems, der mit zumindest einem Teil der Vielzahl von Bodenstationen (200, 210) gekoppelt ist, Erzeugen einer Fahrzeugposition des alternativen Verfolgungssystems und Erzeugen von Metriken (360) aus der Fahrzeugposition des alternativen Verfolgungssystems in äquivalenten ADS-B-Metrikformaten, gekennzeichnet durch Empfangen von ADS-B-Metriken (350) vom ADS-B-Prozessor (300) und von Metriken (360) des alternativen Verfolgungssystems vom Prozessor (310) des alternativen Verfolgungssystems in einem Systemprozessor (400), wobei der Systemprozessor (400) mindestens eines von Auswählen und Vereinigen von Verfolgungsdaten auf der Basis der ADS-B-Metriken und der Metriken des alternativen Verfolgungssystems (350, 360) durchführt, wobei der Systemprozessor (400) die Metriken sowohl des ADS-B- als auch des alternativen Verfolgungssystems auswertet und feststellt, welches der beiden das genauere ist, und Fehler in einem des ADS-B- und des alternativen Verfolgungssystems erkennt Verfahren nach Anspruch 10, wobei die Stationen des alternativen Verfolgungssystems ferner ADS-B-Verfolgungssystemstationen aufweisen. 12. Verfahren nach Anspruch 11, wobei der Systemprozessor (400) ein Flugsicherungs- (ATC) Systemprozessor ist Verfahren nach Anspruch 10, wobei das ATC-System alternative Überwachungsdatenmetriken anwendet, um geeignete Flugzeugabstandskriterien festzulegen Verfahren nach Anspruch 12, wobei die ADS-B-Signale mindestens eine oder mehrere Leistungsmetriken, Navigationsgenauigkeitskategorie (NAC), Navigationsintegritätskategorie (NIC), Überwachungsintegritätsniveau (SIL) und Qualität der barometrischen Höhe (BAQ) enthalten, die von den ADS-B-Stationen (210) zu einem ADS-B- Prozessor (300) weitergeleitet werden. 15. Verfahren nach Anspruch 14, wobei der ADS-B-Prozessor (300) mindestens eine oder mehrere der vom Flugzeug stammenden Metriken NIC, NAC, SIL und BAQ an den ATC-Prozessor (400) ausgibt Verfahren nach Anspruch 15, wobei der Prozessor (310) des alternativen Verfolgungssystems mindestens eine oder mehrere der Metrikinformationen der Überwachungsintegritätskategorie (SIC), des Überwachungsintegritätsniveaus (SIL) und der Qualität der barometrischen Höhe (BAQ) erzeugt. 17. Verfahren nach Anspruch 16, wobei der Prozessor (310) des alternativen Verfolgungssystems mindestens eine oder mehrere der von der Überwachung stammenden Metriken SIC, SIL und BAQ an den ATC-Prozessor (400) ausgibt. 18. Verfahren nach Anspruch 10, wobei das alternative Verfolgungssystem eines oder mehrere von Multilateration, 10
, passivem SSR, passivem Primärradar,")
11 Primärradar, Sekundärüberwachungsradar (SSR), passivem SSR, passivem Primärradar, ADS-B-Ankunftswinkel aus Phasenmessungen aufweist Revendications 1. Système destiné à mesurer et à surveiller des mesures de performances d un système de poursuite non ADS-B et à générer des mesures de performances pour le système de poursuite non ADS-B en termes de mesures de performances équivalentes ADS-B, le système comprenant : une pluralité de récepteurs de stations au sol (200, 210) destinés à recevoir en provenance d un véhicule (100), des signaux (110) comprenant des signaux ADS-B, la pluralité de récepteurs de stations au sol (200, 210) comprenant au moins des stations ADS-B (210), et des stations alternatives d un système de poursuite (200), un dispositif de traitement ADS-B (300), couplé à au moins une partie de la pluralité de stations au sol (200, 210), destiné à obtenir des mesures ADS-B obtenues par des aéronefs (350) à partir des signaux ADS-B, et un dispositif de traitement alternatif d un système de poursuite ADS-B (310), couplé à au moins une partie de la pluralité de stations au sol (200, 210), destiné à recevoir des données de poursuite en provenance des stations alternatives d un système de poursuite (200), à déterminer une position de véhicule à partir des données de poursuite pour générer une position de véhicule d un système de poursuite alternatif, et à générer des mesures (360) à partir de la position de véhicule d un système de poursuite alternatif dans des formats de mesures ADS-B équivalents caractérisé par un dispositif de traitement de système (400) destiné à recevoir des mesures ADS-B (350) en provenance du dispositif de traitement ADS-B (300) et des mesures d un système de poursuite alternatif (360) en provenance du dispositif de traitement d un système de poursuite alternatif (310), le dispositif de traitement (400) effectuant au moins l une d une sélection et d une fusion de données de poursuite sur la base des mesures ADS-B et de l autre système de poursuite (350, 360), dans lequel le dispositif de traitement de système (400) évalue les mesures à la fois du système ADS-B et de l autre système de poursuite alternatif et détermine laquelle est la plus précise des deux, et détecte des erreurs dans l un du système ADS-B et de l autre système de poursuite alternatif. 2. Système selon la revendication 1, dans lequel les stations d autre système de poursuite comprennent en outre des stations de système de poursuite ADS-B Système selon la revendication 2, dans lequel le dispositif de traitement de système (400) est un dispositif de traitement de système de commande de trafic aérien (ATC). 4. Système selon la revendication 1, dans lequel le système de commande ATC applique d autres mesures de données de surveillance pour déterminer des critères de séparation d aéronefs appropriés. 5. Système selon la revendication 3, dans lequel les signaux ADS-B contiennent un ou plusieurs éléments parmi des mesures de performances, une catégorie de précision de navigation (NAC), une catégorie d intégrité de navigation (NIC), un niveau d intégrité de surveillance (SIL) et une qualité d altitude barométrique (BAQ), qui sont transmis des stations ADS-B (210) à un dispositif de traitement ADS-B (300). 6. Système selon la revendication 5, dans lequel le dispositif de traitement ADS-B (300) fournit en sortie au moins une ou plusieurs mesures obtenues par des aéronefs NIC, NAC, SIL, et BAQ pour le dispositif de traitement de commande ATC. 7. Système selon la revendication 6, dans lequel le dispositif de traitement d un système alternatif de poursuite (310) génère au moins une ou plusieurs informations de mesures de catégorie d intégrité de surveillance (SIC), de niveau d intégrité de surveillance (SIL) et de qualité d altitude barométrique (BAQ). 8. Système selon la revendication 7, dans lequel le dispositif de traitement d un système de poursuite alternatif (310) fournit en sortie au moins une ou plusieurs des mesures obtenues par surveillance SIC, SIL et BAQ pour le dispositif de traitement de commande ATC. 9. Système selon la revendication 1, dans lequel l autre système de poursuite comprend un ou plusieurs des éléments 11
 comprenant au moins des stations ADS-B (210), et des stations alternatives d un système de poursuite (200), un")
12 parmi une multilatération, un radar principal, un radar de surveillance secondaire (SSR), un radar SSR passif, un radar principal passif, des mesures d angle d arrivée ADS-B par rapport à la phase Procédé destiné à mesurer et à surveiller des mesures de performances d un système de poursuite non ADS-B et à générer des mesures de performances pour le système de poursuite non ADS-B en termes de mesures de performances équivalentes ADS-B, le procédé comprenant les étapes consistant à : recevoir dans une pluralité de récepteurs de stations au sol (200, 210), des signaux (110) en provenance d un véhicule (100) comprenant des signaux ADS-B, la pluralité de récepteurs de stations au sol (200, 210) comprenant au moins des stations ADS-B (210), et des stations d un système de poursuite alternatif (200), obtenir, dans un dispositif de traitement ADS-B (300), couplé à au moins une partie de la pluralité de stations au sol (200, 210), des mesures ADS-B obtenues par des aéronefs (350) à partir des signaux ADS-B, et recevoir des données de poursuite en provenance des stations d un système alternatif de poursuite (200) et déterminer une position de véhicule à partir des données de poursuite dans un dispositif de traitement d un système de poursuite ADS-B alternatif (310), couplé à au moins une partie de la pluralité de stations au sol (200, 210), générer une position d un système de poursuite alternatif, et générer des mesures (360) à partir de la position de véhicule d un système de poursuite alternatif dans des formats de mesures ADS-B équivalents caractérisé par la réception, dans un dispositif de traitement de système (400), de mesures ADS-B (350) en provenance du dispositif de traitement ADS-B (300) et de mesures d un système de poursuite alternatif (360) en provenance du dispositif de traitement d un système de poursuite alternatif (310), le dispositif de traitement (400) effectuant au moins l une d une sélection et d une fusion de données de poursuite sur la base des mesures ADS-B et de l autre système de poursuite (350, 360), dans lequel le dispositif de traitement de système (400) évalue les mesures à la fois du système ADS-B et de l autre système de poursuite et détermine laquelle est 1 plus précise des deux, et détecte des erreurs dans l un du système ADS-B et de l autre système de poursuite Procédé selon la revendication 10, dans lequel les stations d autre système de poursuite comprennent en outre des stations de système de poursuite ADS-B. 12. Procédé selon la revendication 11, dans lequel le dispositif de traitement de système (400) est un dispositif de traitement de système de commande de trafic aérien (ATC). 13. Procédé selon la revendication 10, dans lequel le système de commande ATC applique d autres mesures de données de surveillance pour déterminer des critères de séparation d aéronefs appropriés Procédé selon la revendication 12, dans lequel les signaux ADS-B contiennent un ou plusieurs éléments parmi des mesures de performances, une catégorie de précision de navigation (NAC), une catégorie d intégrité de navigation (NIC), un niveau d intégrité de surveillance (SIL) et une qualité d altitude barométrique (BAQ), qui sont transmis des stations ADS-B (210) à un dispositif de traitement ADS-B (300) Procédé selon la revendication 14, dans lequel le dispositif de traitement ADS-B (300) fournit en sortie au moins une ou plusieurs mesures obtenues par des aéronefs NIC, NAC, SIL, et BAQ pour le dispositif de traitement de commande ATC (400). 16. Procédé selon la revendication 15, dans lequel le dispositif de traitement d autre système de poursuite (310) génère au moins une ou plusieurs informations de mesures de catégorie d intégrité de surveillance (SIC), de niveau d intégrité de surveillance (SIL) et de qualité d altitude barométrique (BAQ). 17. Procédé selon la revendication 16, dans lequel le dispositif de traitement d autre système de poursuite (310) fournit en sortie au moins une ou plusieurs des mesures obtenues par surveillance SIC, SIL et BAQ pour le dispositif de traitement de commande ATC (400). 18. Procédé selon la revendication 10, dans lequel l autre système de poursuite comprend un ou plusieurs des éléments parmi une multilatération, un radar principal, un radar de surveillance secondaire (SSR), un radar SSR passif, un radar principal passif, des mesures d angle d arrivée ADS-B par rapport à la phase. 12
 en provenance d un véhicule (100) comprenant des signaux ADS-B, la pluralité de récepteurs de stations au sol (200, 210) comprenant au moins des stations ADS-B (210), et des stations d un")
13 13
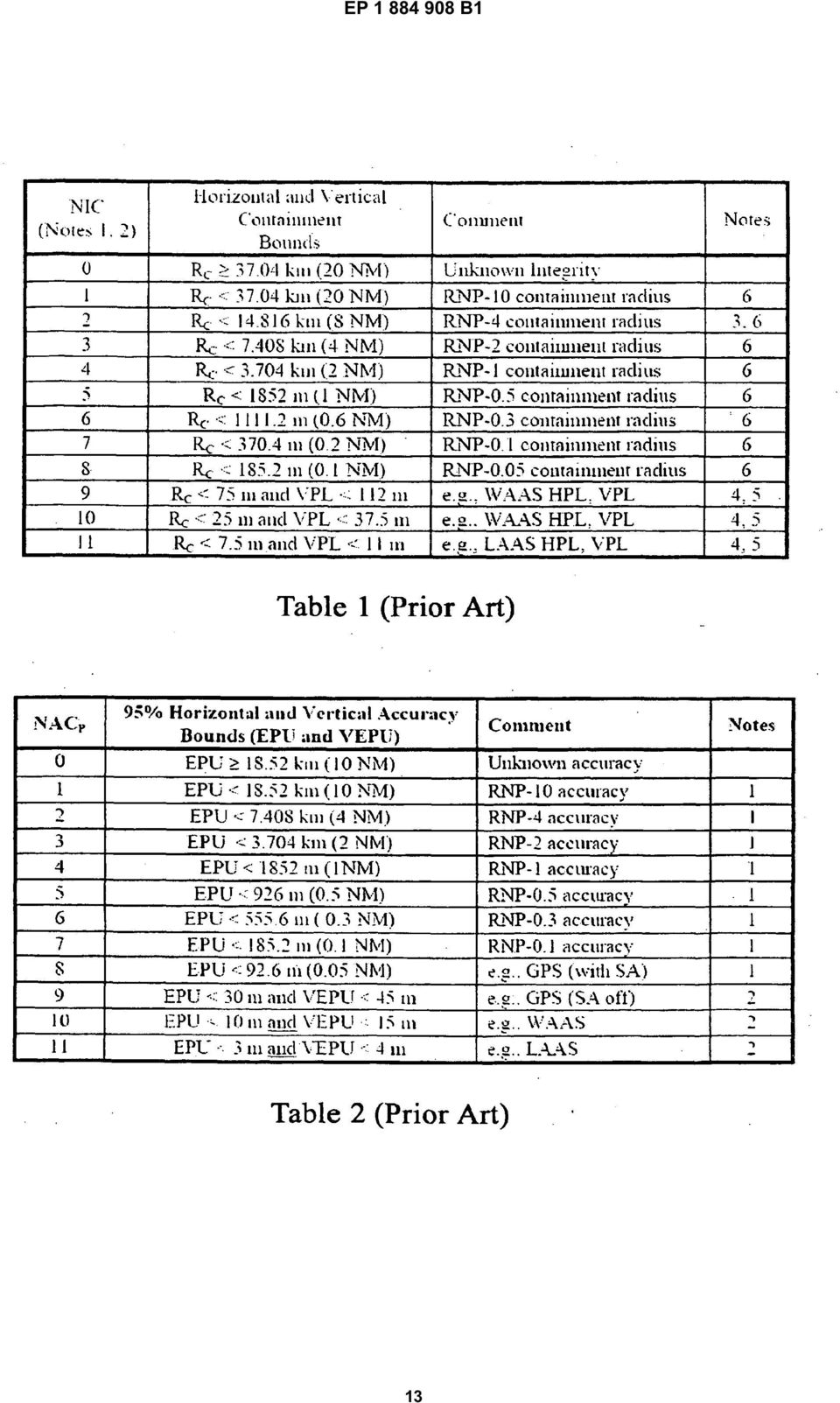
14 14

15 15
16 16
17 17

18 18
19 19
20 20

21 21
22 22
23 23
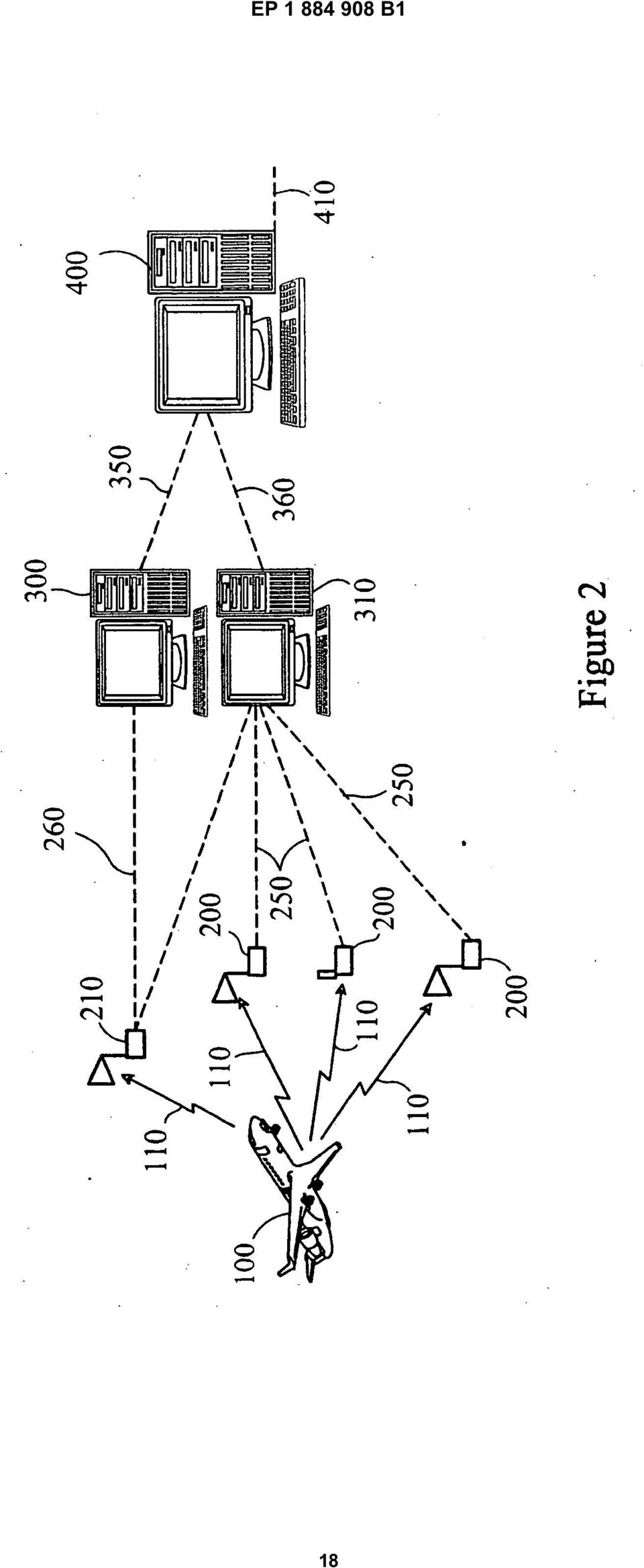
24 24
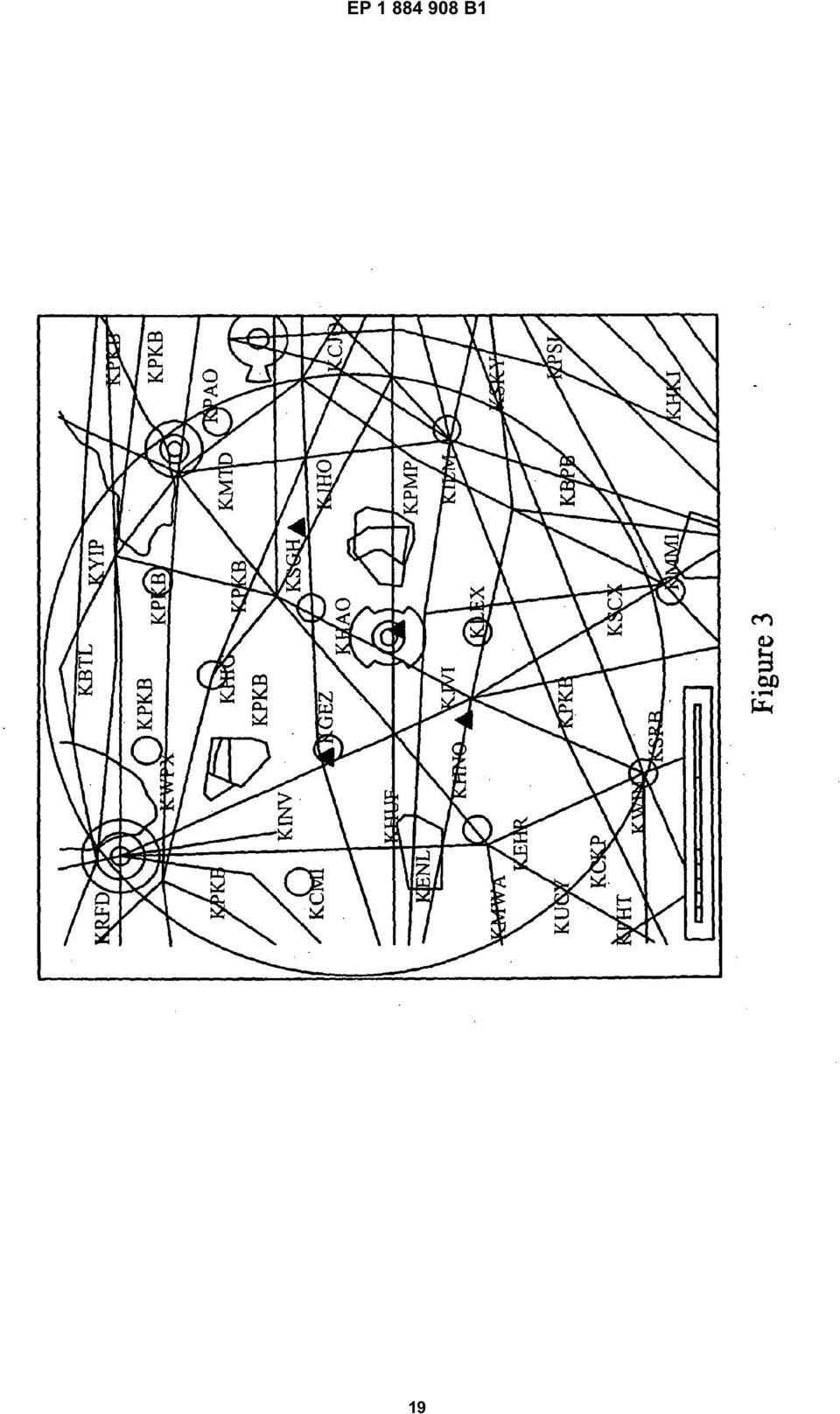
25 REFERENCES CITED IN THE DESCRIPTION This list of references cited by the applicant is for the reader s convenience only. It does not form part of the European patent document. Even though great care has been taken in compiling the references, errors or omissions cannot be excluded and the EPO disclaims all liability in this regard. Patent documents cited in the description US A1 [0021] US A [0022] 25
TEPZZ_768 7_B_T EP 1 768 371 B1 (19) (11) EP 1 768 371 B1 (12) EUROPEAN PATENT SPECIFICATION. (51) Int Cl.: H04M 19/04 (2006.01)
 (11) EP 1 768 371 B1 (12) EUROPEAN PATENT SPECIFICATION. (51) Int Cl.: H04M 19/04 (2006.01)") (19) TEPZZ_768 7_B_T (11) EP 1 768 371 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1.01.2014 Bulletin 2014/03 (1) Int Cl.: H04M 19/04 (2006.01)
(19) TEPZZ_768 7_B_T (11) EP 1 768 371 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1.01.2014 Bulletin 2014/03 (1) Int Cl.: H04M 19/04 (2006.01)
(51) Int Cl.: H04N 7/16 (2011.01)
 Int Cl.: H04N 7/16 (2011.01)") (19) TEPZZ_796 89B_T (11) EP 1 796 389 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 04.03.1 Bulletin 1/ (1) Int Cl.: H04N 7/16 (11.01) (21) Application
(19) TEPZZ_796 89B_T (11) EP 1 796 389 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 04.03.1 Bulletin 1/ (1) Int Cl.: H04N 7/16 (11.01) (21) Application
(51) Int Cl.: B29C 41/20 (2006.01) F21S 4/00 (2006.01) H05K 3/28 (2006.01)
 Int Cl.: B29C 41/20 (2006.01) F21S 4/00 (2006.01) H05K 3/28 (2006.01)") (19) TEPZZ 68698B_T (11) EP 2 68 698 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 18.11.201 Bulletin 201/47 (21) Application number: 11808612.3
(19) TEPZZ 68698B_T (11) EP 2 68 698 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 18.11.201 Bulletin 201/47 (21) Application number: 11808612.3
(51) Int Cl.: G05F 3/26 (2006.01) G05F 3/24 (2006.01)
 Int Cl.: G05F 3/26 (2006.01) G05F 3/24 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 280 033 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 31.0.2006
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 280 033 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 31.0.2006
*EP001173363B1* EP 1 173 363 B1 (19) (11) EP 1 173 363 B1 (12) EUROPEAN PATENT SPECIFICATION
 (11) EP 1 173 363 B1 (12) EUROPEAN PATENT SPECIFICATION") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001173363B1* (11) EP 1 173 363 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001173363B1* (11) EP 1 173 363 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of
(51) Int Cl.: G06F 13/38 (2006.01) G06F 1/16 (2006.01)
 Int Cl.: G06F 13/38 (2006.01) G06F 1/16 (2006.01)") (19) TEPZZ 9777B_T (11) EP 2 97 77 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1.07.1 Bulletin 1/29 (1) Int Cl.: G06F 13/38 (06.01) G06F 1/16 (06.01)
(19) TEPZZ 9777B_T (11) EP 2 97 77 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1.07.1 Bulletin 1/29 (1) Int Cl.: G06F 13/38 (06.01) G06F 1/16 (06.01)
(51) Int Cl.: H04L 12/56 (2006.01)
 Int Cl.: H04L 12/56 (2006.01)") (19) (11) EP 1 779 90 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 28.12.11 Bulletin 11/2 (21) Application number: 0783482.2 (22) Date of filing:
(19) (11) EP 1 779 90 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 28.12.11 Bulletin 11/2 (21) Application number: 0783482.2 (22) Date of filing:
(51) Int Cl.: G10L 15/26 (2006.01)
 Int Cl.: G10L 15/26 (2006.01)") (19) TEPZZ Z 8B_T (11) EP 2 023 338 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 28.0.14 Bulletin 14/22 (1) Int Cl.: GL /26 (06.01) (21) Application
(19) TEPZZ Z 8B_T (11) EP 2 023 338 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 28.0.14 Bulletin 14/22 (1) Int Cl.: GL /26 (06.01) (21) Application
(51) Int Cl.: H04W 4/14 (2009.01)
 Int Cl.: H04W 4/14 (2009.01)") (19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 2 184 897 B1 (4) Date of publication and mention of the grant of the patent: 14.03.12 Bulletin 12/11 (21) Application number: 087774.3 (22) Date of filing:
(19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 2 184 897 B1 (4) Date of publication and mention of the grant of the patent: 14.03.12 Bulletin 12/11 (21) Application number: 087774.3 (22) Date of filing:
(51) Int Cl.: G06F 1/00 (2006.01)
 Int Cl.: G06F 1/00 (2006.01)") (19) (11) EP 0 972 234 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 0.09.07 Bulletin 07/36 (21) Application number: 98913219.6 (22) Date of filing:
(19) (11) EP 0 972 234 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 0.09.07 Bulletin 07/36 (21) Application number: 98913219.6 (22) Date of filing:
(51) Int Cl.: G06F 21/00 (2006.01) H04L 29/06 (2006.01)
 Int Cl.: G06F 21/00 (2006.01) H04L 29/06 (2006.01)") (19) TEPZZ_8Z_7 _B_T (11) EP 1 801 721 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 16.06. Bulletin /24 (1) Int Cl.: G06F 21/00 (06.01) H04L 29/06
(19) TEPZZ_8Z_7 _B_T (11) EP 1 801 721 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 16.06. Bulletin /24 (1) Int Cl.: G06F 21/00 (06.01) H04L 29/06
(51) Int Cl.: H04L 29/06 (2006.01) G06F 9/445 (2006.01) G06F 13/00 (2006.01)
 Int Cl.: H04L 29/06 (2006.01) G06F 9/445 (2006.01) G06F 13/00 (2006.01)") (19) TEPZZ_7486_6B_T (11) EP 1 748 616 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.09.2014 Bulletin 2014/36 (1) Int Cl.: H04L 29/06 (2006.01)
(19) TEPZZ_7486_6B_T (11) EP 1 748 616 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.09.2014 Bulletin 2014/36 (1) Int Cl.: H04L 29/06 (2006.01)
EP 2 455 926 A1 (19) (11) EP 2 455 926 A1 (12) EUROPEAN PATENT APPLICATION. (43) Date of publication: 23.05.2012 Bulletin 2012/21
 (11) EP 2 455 926 A1 (12) EUROPEAN PATENT APPLICATION. (43) Date of publication: 23.05.2012 Bulletin 2012/21") (19) (12) EUROPEAN PATENT APPLICATION (11) EP 2 4 926 A1 (43) Date of publication: 23.0.2012 Bulletin 2012/21 (21) Application number: 11190024.7 (1) Int Cl.: G08B 2/14 (2006.01) G08B 2/00 (2006.01) G0B
(19) (12) EUROPEAN PATENT APPLICATION (11) EP 2 4 926 A1 (43) Date of publication: 23.0.2012 Bulletin 2012/21 (21) Application number: 11190024.7 (1) Int Cl.: G08B 2/14 (2006.01) G08B 2/00 (2006.01) G0B
TEPZZ 87_546A T EP 2 871 546 A2 (19) (11) EP 2 871 546 A2 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: G05B 19/05 (2006.01)
 (11) EP 2 871 546 A2 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: G05B 19/05 (2006.01)") (19) TEPZZ 87_46A T (11) EP 2 871 46 A2 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 13.0.1 Bulletin 1/ (1) Int Cl.: G0B 19/0 (06.01) (21) Application number: 14188238.1 (22) Date of filing:
(19) TEPZZ 87_46A T (11) EP 2 871 46 A2 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 13.0.1 Bulletin 1/ (1) Int Cl.: G0B 19/0 (06.01) (21) Application number: 14188238.1 (22) Date of filing:
TEPZZ 5Z _9_B_T EP 2 502 191 B1 (19) (11) EP 2 502 191 B1 (12) EUROPEAN PATENT SPECIFICATION
 (11) EP 2 502 191 B1 (12) EUROPEAN PATENT SPECIFICATION") (19) TEPZZ Z _9_B_T (11) EP 2 02 191 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 17.06.1 Bulletin 1/2 (21) Application number: 787872.0 (22) Date
(19) TEPZZ Z _9_B_T (11) EP 2 02 191 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 17.06.1 Bulletin 1/2 (21) Application number: 787872.0 (22) Date
(51) Int Cl.: H04L 12/58 (2006.01)
 Int Cl.: H04L 12/58 (2006.01)") (19) (11) EP 1 628 448 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 21.11.07 Bulletin 07/47 (1) Int Cl.: H04L 12/8 (06.01) (21) Application number:
(19) (11) EP 1 628 448 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 21.11.07 Bulletin 07/47 (1) Int Cl.: H04L 12/8 (06.01) (21) Application number:
TEPZZ 6_Z76 A_T EP 2 610 763 A1 (19) (11) EP 2 610 763 A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.:
 (11) EP 2 610 763 A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.:") (19) TEPZZ 6_Z76 A_T (11) EP 2 6 763 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 03.07.2013 Bulletin 2013/27 (51) Int Cl.: G06F 17/30 (2006.01) (21) Application number: 12192220.7 (22)
(19) TEPZZ 6_Z76 A_T (11) EP 2 6 763 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 03.07.2013 Bulletin 2013/27 (51) Int Cl.: G06F 17/30 (2006.01) (21) Application number: 12192220.7 (22)
(51) Int Cl.: G08G 1/14 (2006.01) G07B 15/02 (2006.01) G10L 15/28 (2006.01)
 Int Cl.: G08G 1/14 (2006.01) G07B 15/02 (2006.01) G10L 15/28 (2006.01)") (19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 862 986 B1 (4) Date of publication and mention of the grant of the patent: 14.07. Bulletin /28 (1) Int Cl.: G08G 1/14 (06.01) G07B 1/02 (06.01) GL 1/28
(19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 862 986 B1 (4) Date of publication and mention of the grant of the patent: 14.07. Bulletin /28 (1) Int Cl.: G08G 1/14 (06.01) G07B 1/02 (06.01) GL 1/28
(51) Int Cl.: H05K 1/02 (2006.01)
 Int Cl.: H05K 1/02 (2006.01)") (19) (11) EP 1 229 767 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 20.01.2010 Bulletin 2010/03 (1) Int Cl.: H0K 1/02 (2006.01) (21) Application
(19) (11) EP 1 229 767 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 20.01.2010 Bulletin 2010/03 (1) Int Cl.: H0K 1/02 (2006.01) (21) Application
EP 2 492 881 A2 (19) (11) EP 2 492 881 A2 (12) EUROPEAN PATENT APPLICATION. (43) Date of publication: 29.08.2012 Bulletin 2012/35
 (11) EP 2 492 881 A2 (12) EUROPEAN PATENT APPLICATION. (43) Date of publication: 29.08.2012 Bulletin 2012/35") (19) (12) EUROPEAN PATENT APPLICATION (11) EP 2 492 881 A2 (43) Date of publication: 29.08.2012 Bulletin 2012/35 (51) Int Cl.: G08B 13/16 (2006.01) G08B 25/08 (2006.01) (21) Application number: 12386006.6
(19) (12) EUROPEAN PATENT APPLICATION (11) EP 2 492 881 A2 (43) Date of publication: 29.08.2012 Bulletin 2012/35 (51) Int Cl.: G08B 13/16 (2006.01) G08B 25/08 (2006.01) (21) Application number: 12386006.6
(51) Int Cl.: H04L 29/06 (2006.01) H04L 12/22 (2006.01)
 Int Cl.: H04L 29/06 (2006.01) H04L 12/22 (2006.01)") (19) (11) EP 0 998 091 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 31.01.07 Bulletin 07/0 (1) Int Cl.: H04L 29/06 (06.01) H04L 12/22 (06.01) (21)
(19) (11) EP 0 998 091 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 31.01.07 Bulletin 07/0 (1) Int Cl.: H04L 29/06 (06.01) H04L 12/22 (06.01) (21)
(51) Int Cl.: G06F 9/455 (2006.01) G06F 9/50 (2006.01)
 Int Cl.: G06F 9/455 (2006.01) G06F 9/50 (2006.01)") (19) TEPZZ 6987 B_T (11) EP 2 698 711 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 0.08.1 Bulletin 1/32 (21) Application number: 118777.8 (22) Date
(19) TEPZZ 6987 B_T (11) EP 2 698 711 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 0.08.1 Bulletin 1/32 (21) Application number: 118777.8 (22) Date
(51) Int Cl.: C08K 5/523 (2006.01) C08K 5/521 (2006.01) C08K 5/52 (2006.01) C08G 64/00 (2006.01)
 Int Cl.: C08K 5/523 (2006.01) C08K 5/521 (2006.01) C08K 5/52 (2006.01) C08G 64/00 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 0 78 966 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 01.03.06
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 0 78 966 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 01.03.06
(51) Int Cl.: G08B 21/02 (2006.01) H04M 11/04 (2006.01)
 Int Cl.: G08B 21/02 (2006.01) H04M 11/04 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 224 642 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1.03.06
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 224 642 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1.03.06
Understanding Compliance with Automatic Dependent Surveillance Broadcast (ADS-B) Out
 Out") Understanding Compliance with Automatic Dependent Surveillance Broadcast (ADS-B) Out White Paper Doc No.: WHTP-2013-14-05 Revised, October 2014 Safely guiding pilots and their passengers worldwide for
Understanding Compliance with Automatic Dependent Surveillance Broadcast (ADS-B) Out White Paper Doc No.: WHTP-2013-14-05 Revised, October 2014 Safely guiding pilots and their passengers worldwide for
(51) Int Cl.: H04M 3/50 (2006.01)
 Int Cl.: H04M 3/50 (2006.01)") (19) TEPZZ_Z48_64B_T (11) EP 1 048 164 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 07.01.1 Bulletin 1/02 (21) Application number: 9893133.0 (22)
(19) TEPZZ_Z48_64B_T (11) EP 1 048 164 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 07.01.1 Bulletin 1/02 (21) Application number: 9893133.0 (22)
(51) Int Cl.: H04L 12/24 (2006.01)
 Int Cl.: H04L 12/24 (2006.01)") (19) TEPZZ_8_9Z96B_T (11) EP 1 819 096 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 24..12 Bulletin 12/43 (21) Application number: 0818628.9 (22)
(19) TEPZZ_8_9Z96B_T (11) EP 1 819 096 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 24..12 Bulletin 12/43 (21) Application number: 0818628.9 (22)
(51) Int Cl. 7 : G06F 11/22
 Int Cl. 7 : G06F 11/22") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00084463B1* (11) EP 0 844 63 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00084463B1* (11) EP 0 844 63 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of
(51) Int Cl. 7 : G03G 15/00
 Int Cl. 7 : G03G 15/00") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001179B1* (11) EP 1 17 9 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001179B1* (11) EP 1 17 9 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the
TEPZZ 9 Z5A_T EP 2 922 305 A1 (19) (11) EP 2 922 305 A1. (12) EUROPEAN PATENT APPLICATION published in accordance with Art.
 (11) EP 2 922 305 A1. (12) EUROPEAN PATENT APPLICATION published in accordance with Art.") (19) TEPZZ 9 ZA_T (11) EP 2 922 A1 (12) EUROPEAN PATENT APPLICATION published in accordance with Art. 13(4) EPC (43) Date of publication: 23.09.1 Bulletin 1/39 (21) Application number: 1386446.2 (22) Date
(19) TEPZZ 9 ZA_T (11) EP 2 922 A1 (12) EUROPEAN PATENT APPLICATION published in accordance with Art. 13(4) EPC (43) Date of publication: 23.09.1 Bulletin 1/39 (21) Application number: 1386446.2 (22) Date
(51) Int Cl.: H04L 29/06 (2006.01) H04M 15/00 (2006.01)
 Int Cl.: H04L 29/06 (2006.01) H04M 15/00 (2006.01)") (19) TEPZZ 7Z 74 B_T (11) EP 2 702 742 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.04. Bulletin /16 (21) Application number: 1171674.6 (22) Date
(19) TEPZZ 7Z 74 B_T (11) EP 2 702 742 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.04. Bulletin /16 (21) Application number: 1171674.6 (22) Date
(51) Int Cl.: H04N 7/15 (2006.01) H04N 7/18 (2006.01)
 Int Cl.: H04N 7/15 (2006.01) H04N 7/18 (2006.01)") (19) TEPZZ_4967ZZB_T (11) EP 1 496 700 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1.01.14 Bulletin 14/03 (1) Int Cl.: H04N 7/1 (06.01) H04N 7/18
(19) TEPZZ_4967ZZB_T (11) EP 1 496 700 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1.01.14 Bulletin 14/03 (1) Int Cl.: H04N 7/1 (06.01) H04N 7/18
TEPZZ 65Z79 A_T EP 2 650 793 A1 (19) (11) EP 2 650 793 A1. (12) EUROPEAN PATENT APPLICATION published in accordance with Art.
 (11) EP 2 650 793 A1. (12) EUROPEAN PATENT APPLICATION published in accordance with Art.") (19) TEPZZ 65Z79 A_T (11) EP 2 650 793 A1 (12) EUROPEAN PATENT APPLICATION published in accordance with Art. 153(4) EPC (43) Date of publication: 16.10.2013 Bulletin 2013/42 (21) Application number: 12818771.3
(19) TEPZZ 65Z79 A_T (11) EP 2 650 793 A1 (12) EUROPEAN PATENT APPLICATION published in accordance with Art. 153(4) EPC (43) Date of publication: 16.10.2013 Bulletin 2013/42 (21) Application number: 12818771.3
(51) Int Cl.: H04L 12/26 (2006.01)
 Int Cl.: H04L 12/26 (2006.01)") (19) TEPZZ 84 8B_T (11) EP 2 84 338 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 23.09.1 Bulletin 1/39 (1) Int Cl.: H04L 12/26 (06.01) (21) Application
(19) TEPZZ 84 8B_T (11) EP 2 84 338 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 23.09.1 Bulletin 1/39 (1) Int Cl.: H04L 12/26 (06.01) (21) Application
(51) Int Cl.: H04L 9/24 (2006.01) G06Q 10/00 (2012.01)
 Int Cl.: H04L 9/24 (2006.01) G06Q 10/00 (2012.01)") (19) TEPZZ_4Z 68ZB_T (11) EP 1 2 680 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 01.04.1 Bulletin 1/14 (21) Application number: 02741722.9 (22)
(19) TEPZZ_4Z 68ZB_T (11) EP 1 2 680 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 01.04.1 Bulletin 1/14 (21) Application number: 02741722.9 (22)
(51) Int Cl.: H04L 12/24 (2006.01)
 Int Cl.: H04L 12/24 (2006.01)") (19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 487 11 B1 (4) Date of publication and mention of the grant of the patent: 01.07.09 Bulletin 09/27 (1) Int Cl.: H04L 12/24 (06.01) (21) Application number:
(19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 487 11 B1 (4) Date of publication and mention of the grant of the patent: 01.07.09 Bulletin 09/27 (1) Int Cl.: H04L 12/24 (06.01) (21) Application number:
TEPZZ 68575_A_T EP 2 685 751 A1 (19) (11) EP 2 685 751 A1. (12) EUROPEAN PATENT APPLICATION published in accordance with Art.
 (11) EP 2 685 751 A1. (12) EUROPEAN PATENT APPLICATION published in accordance with Art.") (19) TEPZZ 687_A_T (11) EP 2 68 71 A1 (12) EUROPEAN PATENT APPLICATION published in accordance with Art. 3(4) EPC (43) Date of publication:.01.14 Bulletin 14/03 (21) Application number: 1278849.6 (22)
(19) TEPZZ 687_A_T (11) EP 2 68 71 A1 (12) EUROPEAN PATENT APPLICATION published in accordance with Art. 3(4) EPC (43) Date of publication:.01.14 Bulletin 14/03 (21) Application number: 1278849.6 (22)
(51) Int Cl. 7 : H04B 7/185, H04B 1/40. (56) References cited: WO-A-00/03494
 Int Cl. 7 : H04B 7/185, H04B 1/40. (56) References cited: WO-A-00/03494") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001363412B1* (11) EP 1 363 412 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001363412B1* (11) EP 1 363 412 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of
The Advantialer and Its Advantages
 (19) TEPZZ Z B_T (11) EP 2 0 113 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 16.09.1 Bulletin 1/38 (21) Application number: 07809477.8 (22) Date
(19) TEPZZ Z B_T (11) EP 2 0 113 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 16.09.1 Bulletin 1/38 (21) Application number: 07809477.8 (22) Date
INITIAL TEST RESULTS OF PATHPROX A RUNWAY INCURSION ALERTING SYSTEM
 INITIAL TEST RESULTS OF PATHPROX A RUNWAY INCURSION ALERTING SYSTEM Rick Cassell, Carl Evers, Ben Sleep and Jeff Esche Rannoch Corporation, 1800 Diagonal Rd. Suite 430, Alexandria, VA 22314 Abstract This
INITIAL TEST RESULTS OF PATHPROX A RUNWAY INCURSION ALERTING SYSTEM Rick Cassell, Carl Evers, Ben Sleep and Jeff Esche Rannoch Corporation, 1800 Diagonal Rd. Suite 430, Alexandria, VA 22314 Abstract This
(51) Int Cl.: H04B 3/23 (2006.01)
 Int Cl.: H04B 3/23 (2006.01)") (19) (11) EP 0 983 638 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 21.03.12 Bulletin 12/12 (21) Application number: 989232.7 (22) Date of filing:
(19) (11) EP 0 983 638 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 21.03.12 Bulletin 12/12 (21) Application number: 989232.7 (22) Date of filing:
(51) Int Cl.: H04L 9/32 (2006.01) H04B 7/00 (2006.01) A61N 1/37 (2006.01)
 Int Cl.: H04L 9/32 (2006.01) H04B 7/00 (2006.01) A61N 1/37 (2006.01)") (19) TEPZZ_4977B_T (11) EP 1 49 77 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.12.14 Bulletin 14/0 (21) Application number: 03723989.4 (22) Date
(19) TEPZZ_4977B_T (11) EP 1 49 77 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.12.14 Bulletin 14/0 (21) Application number: 03723989.4 (22) Date
(51) Int Cl.: H04L 12/10 (2006.01) H04L 12/40 (2006.01)
 Int Cl.: H04L 12/10 (2006.01) H04L 12/40 (2006.01)") (19) TEPZZ 4799 B_T (11) EP 2 479 92 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 14.0.14 Bulletin 14/ (1) Int Cl.: H04L 12/ (06.01) H04L 12/ (06.01)
(19) TEPZZ 4799 B_T (11) EP 2 479 92 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 14.0.14 Bulletin 14/ (1) Int Cl.: H04L 12/ (06.01) H04L 12/ (06.01)
(51) Int Cl.: H04L 12/56 (2006.01) H04L 12/28 (2006.01) H04M 7/00 (2006.01)
 Int Cl.: H04L 12/56 (2006.01) H04L 12/28 (2006.01) H04M 7/00 (2006.01)") (19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 129 0 B1 (4) Date of publication and mention of the grant of the patent: 09.04.08 Bulletin 08/1 (21) Application number: 9996836.2 (22) Date of filing:
(19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 129 0 B1 (4) Date of publication and mention of the grant of the patent: 09.04.08 Bulletin 08/1 (21) Application number: 9996836.2 (22) Date of filing:
(51) Int Cl.: B61K 9/12 (2006.01)
 Int Cl.: B61K 9/12 (2006.01)") (19) (11) EP 2 001 722 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 21.12.11 Bulletin 11/1 (21) Application number: 077926.6 (22) Date of filing:
(19) (11) EP 2 001 722 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 21.12.11 Bulletin 11/1 (21) Application number: 077926.6 (22) Date of filing:
(51) Int Cl.: G05B 19/05 (2006.01)
 Int Cl.: G05B 19/05 (2006.01)") (19) (11) EP 1 291 74 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.06.07 Bulletin 07/2 (1) Int Cl.: G0B 19/0 (06.01) (21) Application number: 078479.9
(19) (11) EP 1 291 74 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.06.07 Bulletin 07/2 (1) Int Cl.: G0B 19/0 (06.01) (21) Application number: 078479.9
(51) Int Cl.: G06F 9/50 (2006.01) G06F 9/48 (2006.01)
 Int Cl.: G06F 9/50 (2006.01) G06F 9/48 (2006.01)") (19) TEPZZ Z4878B_T (11) EP 2 048 78 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.04.13 Bulletin 13/ (1) Int Cl.: G06F 9/0 (06.01) G06F 9/48 (06.01)
(19) TEPZZ Z4878B_T (11) EP 2 048 78 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.04.13 Bulletin 13/ (1) Int Cl.: G06F 9/0 (06.01) G06F 9/48 (06.01)
EP 1 976 249 B1 (19) (11) EP 1 976 249 B1 (12) EUROPEAN PATENT SPECIFICATION
 (11) EP 1 976 249 B1 (12) EUROPEAN PATENT SPECIFICATION") (19) (11) EP 1 976 249 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 11.03.09 Bulletin 09/11 (1) Int Cl.: H04M 1/72 (06.01) G06F 9/44 (06.01) H04W
(19) (11) EP 1 976 249 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 11.03.09 Bulletin 09/11 (1) Int Cl.: H04M 1/72 (06.01) G06F 9/44 (06.01) H04W
(51) Int Cl.: H04Q 7/22 (2006.01) (56) References cited:
 Int Cl.: H04Q 7/22 (2006.01) (56) References cited:") (19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 2 414 B1 (4) Date of publication and mention of the grant of the patent:.08.06
(19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 2 414 B1 (4) Date of publication and mention of the grant of the patent:.08.06
*EP001520563A1* EP 1 520 563 A1 (19) (11) EP 1 520 563 A1 (12) EUROPEAN PATENT APPLICATION. (43) Date of publication: 06.04.2005 Bulletin 2005/14
 (11) EP 1 520 563 A1 (12) EUROPEAN PATENT APPLICATION. (43) Date of publication: 06.04.2005 Bulletin 2005/14") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001520563A1* (11) EP 1 520 563 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 06.04.2005 Bulletin 2005/14
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001520563A1* (11) EP 1 520 563 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 06.04.2005 Bulletin 2005/14
(51) Int Cl.: H04Q 11/04 (2006.01) H04L 12/64 (2006.01)
 Int Cl.: H04Q 11/04 (2006.01) H04L 12/64 (2006.01)") (19) (11) EP 1 181 839 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 27.0.09 Bulletin 09/22 (21) Application number: 009391.3 (22) Date of filing:
(19) (11) EP 1 181 839 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 27.0.09 Bulletin 09/22 (21) Application number: 009391.3 (22) Date of filing:
ADS-B is intended to transform air traffic control by providing more accurate and reliable tracking of airplanes in flight and on the ground.
 ADS-B is intended to transform air traffic control by providing more accurate and reliable tracking of airplanes in flight and on the ground. New Air Traffic Surveillance Technology Air traffic service
ADS-B is intended to transform air traffic control by providing more accurate and reliable tracking of airplanes in flight and on the ground. New Air Traffic Surveillance Technology Air traffic service
(51) Int Cl.: H04W 8/16 (2009.01) H04L 29/12 (2006.01) H04W 8/18 (2009.01)
 Int Cl.: H04W 8/16 (2009.01) H04L 29/12 (2006.01) H04W 8/18 (2009.01)") (19) TEPZZ 474_77B_T (11) EP 2 474 177 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 0.11.14 Bulletin 14/4 (21) Application number: 747648.3 (22)
(19) TEPZZ 474_77B_T (11) EP 2 474 177 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 0.11.14 Bulletin 14/4 (21) Application number: 747648.3 (22)
(51) Int Cl.: H04L 29/06 (2006.01) H04M 3/56 (2006.01) H04M 3/44 (2006.01) H04L 12/18 (2006.01)
 Int Cl.: H04L 29/06 (2006.01) H04M 3/56 (2006.01) H04M 3/44 (2006.01) H04L 12/18 (2006.01)") (19) TEPZZ Z9 79B_T (11) EP 2 091 179 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 17.12.14 Bulletin 14/1 (21) Application number: 07817029.7 (22)
(19) TEPZZ Z9 79B_T (11) EP 2 091 179 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 17.12.14 Bulletin 14/1 (21) Application number: 07817029.7 (22)
(51) Int Cl.: H04L 29/06 (2006.01) H04Q 7/24 (2006.01) H04L 12/66 (2006.01)
 Int Cl.: H04L 29/06 (2006.01) H04Q 7/24 (2006.01) H04L 12/66 (2006.01)") (19) (11) EP 1 314 291 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:..07 Bulletin 07/41 (21) Application number: 0194907.2 (22) Date of filing: 06.07.01
(19) (11) EP 1 314 291 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:..07 Bulletin 07/41 (21) Application number: 0194907.2 (22) Date of filing: 06.07.01
TEPZZ 87657ZA_T EP 2 876 570 A1 (19) (11) EP 2 876 570 A1 (12) EUROPEAN PATENT APPLICATION
 (11) EP 2 876 570 A1 (12) EUROPEAN PATENT APPLICATION") (19) TEPZZ 8767ZA_T (11) EP 2 876 70 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 27.0.201 Bulletin 201/22 (21) Application number: 14189809.8 (1) Int Cl.: G06F 21/34 (2013.01) G08B 13/196
(19) TEPZZ 8767ZA_T (11) EP 2 876 70 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 27.0.201 Bulletin 201/22 (21) Application number: 14189809.8 (1) Int Cl.: G06F 21/34 (2013.01) G08B 13/196
(51) Int Cl.: H05K 1/02 (2006.01)
 Int Cl.: H05K 1/02 (2006.01)") (19) TEPZZ 4 67B_T (11) EP 2 241 167 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.03.13 Bulletin 13/12 (21) Application number: 0886976.0 (22) Date
(19) TEPZZ 4 67B_T (11) EP 2 241 167 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.03.13 Bulletin 13/12 (21) Application number: 0886976.0 (22) Date
TEPZZ 69 49A_T EP 2 693 349 A1 (19) (11) EP 2 693 349 A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: G06F 17/30 (2006.01)
 (11) EP 2 693 349 A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: G06F 17/30 (2006.01)") (19) TEPZZ 69 49A_T (11) EP 2 693 349 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 0.02.2014 Bulletin 2014/06 (1) Int Cl.: G06F 17/30 (2006.01) (21) Application number: 13160696.4 (22)
(19) TEPZZ 69 49A_T (11) EP 2 693 349 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 0.02.2014 Bulletin 2014/06 (1) Int Cl.: G06F 17/30 (2006.01) (21) Application number: 13160696.4 (22)
Required Surveillance Performance Accuracy to Support 3-Mile and 5-Mile Separation in the National Airspace System
 Project Report ATC-323 Required Surveillance Performance Accuracy to Support 3-Mile and 5-Mile Separation in the National Airspace System S.D. Thompson J.W. Andrews G.S. Harris K.A. Sinclair 1 November
Project Report ATC-323 Required Surveillance Performance Accuracy to Support 3-Mile and 5-Mile Separation in the National Airspace System S.D. Thompson J.W. Andrews G.S. Harris K.A. Sinclair 1 November
(51) Int Cl.: H04L 12/66 (2006.01)
 Int Cl.: H04L 12/66 (2006.01)") (19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 73 43 B1 (4) Date of publication and mention of the grant of the patent: 18.01.12 Bulletin 12/03 (21) Application number: 02792. (22) Date of filing: 26.12.02
(19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 73 43 B1 (4) Date of publication and mention of the grant of the patent: 18.01.12 Bulletin 12/03 (21) Application number: 02792. (22) Date of filing: 26.12.02
(51) Int Cl.: H04L 12/46 (2006.01) H04L 29/14 (2006.01) H04L 29/12 (2006.01)
 Int Cl.: H04L 12/46 (2006.01) H04L 29/14 (2006.01) H04L 29/12 (2006.01)") (19) (11) EP 1 342 344 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.06.09 Bulletin 09/23 (21) Application number: 019639.0 (22) Date of filing:.08.01
(19) (11) EP 1 342 344 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.06.09 Bulletin 09/23 (21) Application number: 019639.0 (22) Date of filing:.08.01
TEPZZ 8898 7A_T EP 2 889 827 A1 (19) (11) EP 2 889 827 A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: G06Q 40/04 (2012.01)
 (11) EP 2 889 827 A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: G06Q 40/04 (2012.01)") (19) TEPZZ 8898 7A_T (11) EP 2 889 827 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 01.07.201 Bulletin 201/27 (1) Int Cl.: G06Q 40/04 (2012.01) (21) Application number: 14199864.1 (22)
(19) TEPZZ 8898 7A_T (11) EP 2 889 827 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 01.07.201 Bulletin 201/27 (1) Int Cl.: G06Q 40/04 (2012.01) (21) Application number: 14199864.1 (22)
Title (fr) SOURCE IONIQUE INTERNE DOUBLE POUR PRODUCTION DE FAISCEAU DE PARTICULES AVEC UN CYCLOTRON
 SOURCE IONIQUE INTERNE DOUBLE POUR PRODUCTION DE FAISCEAU DE PARTICULES AVEC UN CYCLOTRON") Title (en) A TWIN INTERNAL ION SOURCE FOR PARTICLE BEAM PRODUCTION WITH A CYCLOTRON Title (de) DOPPELTE INTERNE IONENQUELLE FÜR PARTIKELSTRAHLHERSTELLUNG MIT EINEM ZYKLOTRON Title (fr) SOURCE IONIQUE INTERNE
Title (en) A TWIN INTERNAL ION SOURCE FOR PARTICLE BEAM PRODUCTION WITH A CYCLOTRON Title (de) DOPPELTE INTERNE IONENQUELLE FÜR PARTIKELSTRAHLHERSTELLUNG MIT EINEM ZYKLOTRON Title (fr) SOURCE IONIQUE INTERNE
(51) Int Cl.: G10L 19/00 (2006.01) H04L 1/20 (2006.01)
 Int Cl.: G10L 19/00 (2006.01) H04L 1/20 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 317 72 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.08.06
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 317 72 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent:.08.06
TEPZZ 96 A_T EP 2 961 111 A1 (19) (11) EP 2 961 111 A1. (12) EUROPEAN PATENT APPLICATION published in accordance with Art.
 (11) EP 2 961 111 A1. (12) EUROPEAN PATENT APPLICATION published in accordance with Art.") (19) TEPZZ 96 A_T (11) EP 2 961 111 A1 (12) EUROPEAN PATENT APPLICATION published in accordance with Art. 13(4) EPC (43) Date of publication:.12.1 Bulletin 1/3 (21) Application number: 147426.7 (22) Date
(19) TEPZZ 96 A_T (11) EP 2 961 111 A1 (12) EUROPEAN PATENT APPLICATION published in accordance with Art. 13(4) EPC (43) Date of publication:.12.1 Bulletin 1/3 (21) Application number: 147426.7 (22) Date
TEPZZ 84 587A_T EP 2 843 587 A1 (19) (11) EP 2 843 587 A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: G06F 21/64 (2013.01)
 (11) EP 2 843 587 A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: G06F 21/64 (2013.01)") (19) TEPZZ 84 87A_T (11) EP 2 843 87 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 04.03.201 Bulletin 201/ (1) Int Cl.: G06F 21/64 (2013.01) (21) Application number: 13181902.1 (22) Date
(19) TEPZZ 84 87A_T (11) EP 2 843 87 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 04.03.201 Bulletin 201/ (1) Int Cl.: G06F 21/64 (2013.01) (21) Application number: 13181902.1 (22) Date
(51) Int Cl.: G06Q 10/00 (2006.01)
 Int Cl.: G06Q 10/00 (2006.01)") (19) (11) EP 1 69 282 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 2.03.09 Bulletin 09/13 (21) Application number: 048.1 (22) Date of filing: 29.11.04
(19) (11) EP 1 69 282 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 2.03.09 Bulletin 09/13 (21) Application number: 048.1 (22) Date of filing: 29.11.04
(51) Int Cl.: G06F 21/24 (2006.01)
 Int Cl.: G06F 21/24 (2006.01)") (19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 674 960 B1 (45) Date of publication and mention of the grant of the patent: 05..2011 Bulletin 2011/40 (51) Int Cl.: G06F 21/24 (2006.01) (21) Application
(19) (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 674 960 B1 (45) Date of publication and mention of the grant of the patent: 05..2011 Bulletin 2011/40 (51) Int Cl.: G06F 21/24 (2006.01) (21) Application
(51) Int Cl.: H04L 12/24 (2006.01) H04L 12/26 (2006.01)
 Int Cl.: H04L 12/24 (2006.01) H04L 12/26 (2006.01)") (19) (11) EP 1 3 219 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.01.07 Bulletin 07/01 (1) Int Cl.: H04L 12/24 (06.01) H04L 12/26 (06.01) (21)
(19) (11) EP 1 3 219 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.01.07 Bulletin 07/01 (1) Int Cl.: H04L 12/24 (06.01) H04L 12/26 (06.01) (21)
(51) Int Cl.: G11C 5/14 (2006.01) G11C 7/10 (2006.01)
 Int Cl.: G11C 5/14 (2006.01) G11C 7/10 (2006.01)") (19) TEPZZ _ 49B_T (11) EP 2 13 249 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 26.11.14 Bulletin 14/48 (21) Application number: 08744214.1 (22)
(19) TEPZZ _ 49B_T (11) EP 2 13 249 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 26.11.14 Bulletin 14/48 (21) Application number: 08744214.1 (22)
(51) Int Cl.: H04M 3/42 (2006.01) H04Q 3/00 (2006.01)
 Int Cl.: H04M 3/42 (2006.01) H04Q 3/00 (2006.01)") (19) (11) EP 1 696 646 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 07.03.12 Bulletin 12/ (1) Int Cl.: H04M 3/42 (06.01) H04Q 3/00 (06.01) (21)
(19) (11) EP 1 696 646 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 07.03.12 Bulletin 12/ (1) Int Cl.: H04M 3/42 (06.01) H04Q 3/00 (06.01) (21)
(51) Int Cl.: G06F 9/445 (2006.01)
 Int Cl.: G06F 9/445 (2006.01)") (19) TEPZZ_649648B_T (11) EP 1 649 648 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1..14 Bulletin 14/42 (21) Application number: 0476769.8 (22)
(19) TEPZZ_649648B_T (11) EP 1 649 648 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 1..14 Bulletin 14/42 (21) Application number: 0476769.8 (22)
(51) Int Cl.: G06F 9/46 (2006.01) H04L 12/56 (2006.01)
 Int Cl.: G06F 9/46 (2006.01) H04L 12/56 (2006.01)") (19) (11) EP 1 611 23 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 21.0.08 Bulletin 08/21 (21) Application number: 0471948.2 (22) Date of filing:
(19) (11) EP 1 611 23 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 21.0.08 Bulletin 08/21 (21) Application number: 0471948.2 (22) Date of filing:
(51) Int Cl.: H04L 29/02 (2006.01) H04L 12/801 (2013.01)
 Int Cl.: H04L 29/02 (2006.01) H04L 12/801 (2013.01)") (19) TEPZZ 7 48ZB_T (11) EP 2 72 480 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.12.2014 Bulletin 2014/49 (21) Application number: 11784039.7
(19) TEPZZ 7 48ZB_T (11) EP 2 72 480 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.12.2014 Bulletin 2014/49 (21) Application number: 11784039.7
(51) Int Cl.: H04N 5/225 (2006.01)
 Int Cl.: H04N 5/225 (2006.01)") (19) TEPZZ_94 66_B_T (11) EP 1 942 661 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 17.09.2014 Bulletin 2014/38 (1) Int Cl.: H04N /22 (2006.01)
(19) TEPZZ_94 66_B_T (11) EP 1 942 661 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 17.09.2014 Bulletin 2014/38 (1) Int Cl.: H04N /22 (2006.01)
(51) Int Cl.: H04L 9/32 (2006.01)
 Int Cl.: H04L 9/32 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 17 038 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 19.07.06
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 17 038 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 19.07.06
(51) Int Cl.: B62M 7/12 (2006.01) B62M 23/02 (2006.01)
 Int Cl.: B62M 7/12 (2006.01) B62M 23/02 (2006.01)") (19) (11) EP 1 810 918 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 18.11.2009 Bulletin 2009/47 (1) Int Cl.: B62M 7/12 (2006.01) B62M 23/02 (2006.01)
(19) (11) EP 1 810 918 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 18.11.2009 Bulletin 2009/47 (1) Int Cl.: B62M 7/12 (2006.01) B62M 23/02 (2006.01)
INTEGRITY AND CONTINUITY ANALYSIS OCTOBER TO DECEMBER 2013 QUARTERLY REPORT FROM GPS. Integrity and Continuity Analysis 08/01/14 08/01/14 08/01/14
 INTEGRITY AND CONTINUITY ANALYSIS FROM GPS OCTOBER TO DECEMBER 2013 QUARTERLY REPORT Prepared by: M Pattinson (NSL) 08/01/14 Checked by: L Banfield (NSL) 08/01/14 Approved by: M Dumville (NSL) 08/01/14
INTEGRITY AND CONTINUITY ANALYSIS FROM GPS OCTOBER TO DECEMBER 2013 QUARTERLY REPORT Prepared by: M Pattinson (NSL) 08/01/14 Checked by: L Banfield (NSL) 08/01/14 Approved by: M Dumville (NSL) 08/01/14