Games for Controller Synthesis
|
|
|
- Margaret George
- 7 years ago
- Views:
Transcription

1 Games for Controller Synthesis Laurent Doyen EPFL MoVeP 08
2 The Synthesis Question Given a plant P Tank Thermometer Gas burner
3 The Synthesis Question Given a plant P and a specification φ, Tank Thermometer Maintain the temperature in the range [T min,t max ]. Gas burner
4 The Synthesis Question Given a plant P and a specification φ, is there a controller C such that the closed-loop system C P satisfies φ? Tank Thermometer Maintain the temperature in the range [T min,t max ].? Gas burner Digital controller
5 Synthesis as a game Given a plant P and a specification φ, is there a controller C such that the closed-loop system C P satisfies φ? Inputs a Plant a? Specification Outputs u u! ϕ ϕ1( a1, u1) ϕ2( a2, u2) Plant: 2-players game arena Input (Player 1, System, Controller) vs. Output (Player 2, Environment, Plant) Specification: game objective for Player 1
6 The Synthesis Question Given a plant P and a specification φ, is there a controller C such that the closed-loop system C P satisfies φ? Controller? Controllable actions a a u u Uncontrollable actions Plant a? u! Specification ϕ ϕ1( a1, u1) ϕ2( a2, u2) If a controller C exists, then construct such a controller.
7 Synthesis as a game Controllable actions Controller a a? u u Uncontrollable actions Plant: 2-players game arena Specification: game objective for Player 1 Controller: winning strategy for Player 1 Plant a? u! Specification ϕ ϕ1( a1, u1) ϕ2( a2, u2) We are often interested in simple controllers: finite-state, or even stateless (memoryless). We are also often interested in least restrictive controllers.
8 Example Objective: avoid Bad? hot! cold! Uncontrollable actions
9 Example Objective: avoid Bad? hot! delay? on?, off? cold! Uncontrollable actions
10 Example Objective: avoid Bad off?? hot! cold! delay? delay? on?, off? on?, delay? off?, delay? Uncontrollable actions on?
11 Example Objective: avoid Bad off? hot delay cold delay on Winning strategy = Controller
12 Games for Synthesis Several types of games: Turn-based vs. Concurrent Perfect-information vs. Partial information Sure vs. Almost-sure winning Objective: graph labelling vs. monitor Timed vs. untimed Stochastic vs. deterministic etc. This tutorial: Games played on graphs, 2 players, turn-based, ω-regular objectives.
13 Games for Synthesis This tutorial: Games played on graphs, 2 players, turn-based, ω-regular objectives. Outline Part #1: perfect-information Part #2: partial-information
14 Two-player game structures
15
16 Rounded states belong to Player 1
17 Rounded states belong to Player 1 Square states belong to Player 2
18 belongs to Player 1 belongs to Player 2 Playing the game: the players move a token along the edges of the graph The token is initially in v 0. In rounded states, Player 1 chooses the next state. In square states, Player 2 chooses the next state.
19 belongs to Player 1 belongs to Player 2 Play: v 0
20 belongs to Player 1 belongs to Player 2 Play: v 0 v 1
21 belongs to Player 1 belongs to Player 2 Play: v 0 v 1 v 3
22 belongs to Player 1 belongs to Player 2 Play: v 0 v 1 v 3 v 0
23 belongs to Player 1 belongs to Player 2 Play: v 0 v 1 v 3 v 0 v 2

24 A 2-player game graph consists of: Two-player game graphs
25 Two-player game graphs A play in is an infinite sequence such that:
26 Who is winning? Play: v 0 v 1 v 3 v 0 v 2
27 Who is winning? Play: v 0 v 1 v 3 v 0 v 2 A winning condition for Player k is a set of plays.
28 Who is winning? A winning condition for Player k is a set of plays. A 2-player game is zero-sum if.
29 Winning condition A winning condition for Player k is a set of plays. Reachability

30 Winning condition A winning condition for Player k is a set of plays. Reachability Safety


31 Winning condition A winning condition for Player k is a set of plays. B C Reachability Safety Büchi cobüchi

32 Remark A winning condition for Player k is a set of plays. p=4 p=1 p=3 p=1 p=0 p=2 p=0 p=3 p=1 p=2
33 Strategies Players use strategies to play the game, i.e. to choose the successor of the current state. A strategy for Player k is a function:
34 Strategies outcome Graph: nondeterministic generator of behaviors. Strategy: deterministic selector of behavior. Graph + Strategies for both players Behavior

35 Strategies outcome
36 Winning strategies Given a game G and winning conditions W 1 and W 2, a strategy λ k is winning for Player k in (G,W k ) if for all strategies λ 3-k of Player 3-k, the outcome of {λ k, λ 3-k } in G is a winning play of W k. Player 1 is winning if Player 2 is winning if
37 Winning strategies = Controllers that enforce winning plays
38 Symbolic algorithms to solve games
39 Controllable predecessors
40 Controllable predecessors
41 Controllable predecessors
42 Controllable predecessors
43 Symbolic algorithm to solve safety games
44 Solving safety games To win a safety game, Player 1 should be able to force the game to be in at every step.
45 Solving safety games To win a safety game, Player 1 should be able to force the game to be in at every step. States in which Player 1 can force the game to stay in for the next: 0 step:
46 Solving safety games To win a safety game, Player 1 should be able to force the game to be in at every step. States in which Player 1 can force the game to stay in for the next: 0 step: 1 step:
47 Solving safety games To win a safety game, Player 1 should be able to force the game to be in at every step. States in which Player 1 can force the game to stay in for the next: 0 step: 1 step: 2 steps:
48 Solving safety games To win a safety game, Player 1 should be able to force the game to be in at every step. States in which Player 1 can force the game to stay in for the next: 0 step: 1 step: 2 steps:
49 Solving safety games To win a safety game, Player 1 should be able to force the game to be in at every step. States in which Player 1 can force the game to stay in for the next: 0 step: 1 step: 2 steps:
50 Solving safety games To win a safety game, Player 1 should be able to force the game to be in at every step. States in which Player 1 can force the game to stay in for the next: 0 step: 1 step: 2 steps:
51 Solving safety games To win a safety game, Player 1 should be able to force the game to be in at every step. States in which Player 1 can force the game to stay in for the next: 0 step: 1 step: 2 steps: n steps:
52 Solving safety games
53 Solving safety games
54 Solving safety games
55 Solving safety games
56 Solving safety games
57 Solving safety games
58 Solving safety games
59 Solving safety games
60 Solving safety games This is the set of states from which Player 1 can confine the game in forever no matter how Player 2 behaves.
61 Solving safety games is a solution of the set-equation and it is the greatest solution.
62 Solving safety games is a solution of the set-equation and it is the greatest solution. We say that is the greatest fixpoint of the function, written: greatest fixpoint operator
63 On fixpoint computations
64 Partial order A partially ordered set is a set equipped with a partial order, i.e. a relation such that: is not necessarily total, i.e. there can be such that and.
65 Partial order Let. is an upper bound of if for all. is a least upper bound of if (1) is an upper bound of, and (2) for all upper bounds of. Note: if has a least upper bound, then it is unique (by anti-symmetry), and we write.
66 Partial order Examples: has no

67 Partial order Examples: has no
68 Partial order A set is a chain if The partially ordered set is complete if (1) has a lub, written, and (2) every chain has a lub.
69 Fixpoints Let be a function. is monotonic if implies. is continuous if(1) is monotonic, and (2) for every chain. where Note: is a chain (i.e. ) by monotonicity, and therefore exists.
70 Fixpoints Let be a function. is a fixpoint of if is a least fixpoint of if (1) is a fixpoint of, and (2) for all fixpoints of.
71 Kleene-Tarski Theorem Let be a partially ordered set. If is a complete partial order, and is a continuous function, then has a least fixpoint, denoted and Proof: exercise.
72 Kleene-Tarski Theorem Let be a partially ordered set. If is a complete partial order, and is a continuous function, then has a least fixpoint, denoted and Proof: exercise. Over finite sets S, all monotonic functions are continuous.
73 Kleene-Tarski Theorem Let be a partially ordered set. If is a complete partial order, and and The greatest fixpoint of can be defined dually by where is the greatest lower bound is a continuous function, then operator (dual of ) and has a least fixpoint, denoted Proof: exercise. Over finite sets S, all monotonic functions are continuous.
74 Safety game Winning states of a safety game: Limit of the iterations: Partial order: with.
75 Symbolic algorithm to solve reachability games
76 Solving reachability games To win a reachability game, Player 1 should be able to force the game be in after finitely many steps.
77 Solving reachability games To win a reachability game, Player 1 should be able to force the game be in after finitely many steps. Let be the set of states from which Player 1 can force the game to be in within at most steps:
78 Solving reachability games Tthe limit of this iteration is the least fixpoint of the function, written: least fixpoint operator

79 Symbolic algorithms Let be a 2-player game graph. Theorem Player 1 has a winning strategy
80 Remarks (I) Memoryless strategies are always sufficient to win parity games, and therefore also for safety, reachability, Büchi and cobüchi objectives.
81 Remarks (I) A memoryless winning strategy
82 Remarks (II) Parity games are determined: in every state, either Player 1 or Player 2 has a winning strategy.
83 Remarks (II) Parity games are determined: in every state, either Player 1 or Player 2 has a winning strategy. Determinacy says: More generally, zero-sum games with Borel objectives are determined [Martin75].
84 Remarks (II) For instance, since, Player 1 does not win iff Player 2 wins. Claim: if, then Proof: exercise Hint: show that
85 Remarks (II)
86 Remarks (II) States in which Player 1 wins for. States in which Player 2 wins for.
87 Games of imperfect information
88 The Synthesis Question off hot delay on, delay cold delay on, off off, delay? on The controller knows the state of the plant ( perfect information ). This, however, is often unrealistic. Sensors provide partial information (imprecision), Sensors have internal delays, Some variables of the plant are invisible, etc.
89 Imperfect information Observations Obs 0 off hot delay on, delay on, off cold delay off, delay on
90 Imperfect information Observations Obs 0 Obs 1 off hot delay on, delay on, off cold delay off, delay on
91 Imperfect information Observations Obs 0 Obs 1 off Obs 2 hot delay on, delay on, off cold delay off, delay on
92 Imperfect information Observations Obs 0 Obs 1 off Obs 2 hot delay on, delay on, off cold delay off, delay on When observing Obs 2, there is no unique good choice: memory is necessary
93 Player 2 states Nondeterminism off delay on, delay on, off delay off, delay on Playing the game: Player 2 moves a token along the edges of the graph, Player 1 does not see the position of the token. Player 1 chooses an action (on, off, delay), and then Player 2 resolves the nondeterminism and announces the color of the state.
94 off delay on, delay on, off delay off, delay on Player 2: Player 1:
95 off delay on, delay on, off delay off, delay on Player 2: v 1 chooses v 1, announces Obs 0 Player 1:
96 off delay on, delay on, off delay off, delay on Player 2: v 1 delay Player 1: delay plays action delay
97 off delay on, delay on, off delay off, delay on Player 2: v 1 delay v chooses v 3 3, announces Obs 2 Player 1: delay
98 off delay on, delay on, off delay off, delay on Player 2: v 1 delay v 3 off Player 1: delay off
99 off delay on, delay on, off delay off, delay on Player 2: v 1 delay v 3 off v 2 Player 1: delay off

100 Imperfect information A game graph + Observation structure off on delay delay on, off on, delay off, delay

101 Strategies Player 1 chooses a letter in, Player 2 resolves nondeteminisim. An observation-based strategy for Player 1 is a function: A strategy for Player 2 is a function:
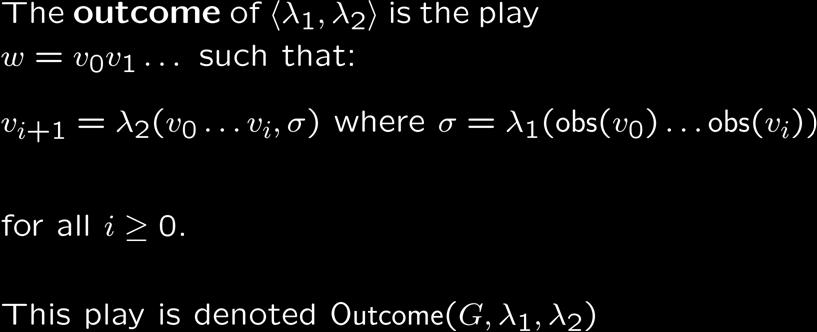
102 Outcome
103 Winning strategies A winning condition for Player 1 is a set of sequences of observations. The set defines the set of winning plays: Player 1 is winning if
104 Solving games of imperfect information
105 Imperfect information Games of imperfect information can be solved by a reduction to games of perfect information. G,Obs G Winning region Imperfect information Perfect information subset construction classical techniques
106 Subset construction After a finite prefix of a play, Player 1 has a partial knowledge of the current state of the game: a set of states, called a cell.
107 Subset construction After a finite prefix of a play, Player 1 has a partial knowledge of the current state of the game: a set of states, called a cell. Initial knowledge: cell
108 Subset construction After a finite prefix of a play, Player 1 has a partial knowledge of the current state of the game: a set of states, called a cell. Initial knowledge: cell Player 1 plays σ, Player 2 chooses v 2. Current knowledge: cell
109 Subset construction Imperfect information Perfect information State space Initial state
110 Transitions Subset construction
111 Transitions Subset construction
112 Parity condition Subset construction
113 Subset construction Parity condition Theorem Player 1 is winning in G,p if and only if Player 1 is winning in G,p.
114 Imperfect information G,Obs G Winning region Imperfect information Perfect information subset construction Exponential blow-up classical techniques
115 Imperfect information G,Obs G Winning region Imperfect implicit Perfect information information Direct symbolic algorithm
116 Symbolic algorithm Controllable predecessor: set of cells set of cells
117 Symbolic algorithm Obs 1 Obs 2 The union of two controllable cells is not necessarily controllable, but
118 Symbolic algorithm If a cell s is controllable (i.e. winning for Player 1), then all sub-cells s s are controllable. copy the strategy from s
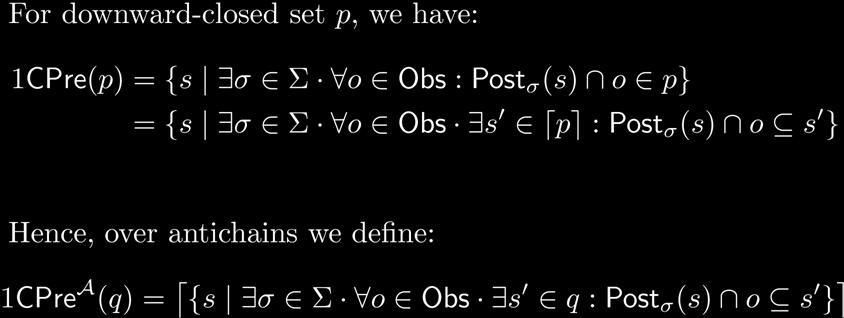
119 Symbolic algorithm The sets of cells computed by the fixpoint iterations are downward-closed.
120 Symbolic algorithm The sets of cells computed by the fixpoint iterations are downward-closed. It is sufficient to keep only the maximal cells.
121 Antichains

122 Antichains

123 Antichains is monotone with respect to the following order: Least upper bound and greatest lower bound are defined by:

124 Symbolic algorithms Let be a 2-player game graph of imperfect information, and a set of observations. Games of imperfect information can be solved by the same fixpoint formulas as for perfect information, namely: Theorem Player 1 has a winning strategy
125 Solving safety games o 1 o 2 o 3
126 Solving safety games o 1 o 2 o 3 Has Player 1 an observation-based strategy to avoid v 3? We compute the fixpoint
127 Solving safety games
128 Solving safety games
129 Solving safety games
130 Solving safety games
131 Solving safety games
132 Solving safety games
133 Solving safety games
134 Solving safety games
135 Solving safety games Fixed point
136 Solving safety games Fixed point Player 1 is winning since
137 Solving safety games Fixed point A winning strategy:
138 Remarks 1. Finite memory may be necessary to win safety and reachability games of imperfect information, and therefore also for Büchi, cobüchi, and parity objectives.
139 Remarks 1. Finite memory may be necessary to win safety and reachability games of imperfect information, and therefore also for Büchi, cobüchi, and parity objectives. 2. Games of imperfect information are not determined.
140 Non determinacy o 1 o 2 Any fixed strategy of Player 1 can be spoiled by a strategy of Player 2 as follows: In : chooses if in the next step plays b, and chooses if in the next step plays a.
141 Non determinacy o 1 o 2 Player 1 cannot enforce. Similarly, Player 2 cannot enforce. because when a strategy of Player 2 is fixed, either or is a spoiling strategy for Player 1.
142 Remarks 1. Finite memory may be necessary to win safety and reachability games of imperfect information, and therefore also for Büchi, cobüchi, and parity objectives. 2. Games of imperfect information are not determined. 3. Randomized strategies are more powerful, already for reachability objectives.
143 Randomization o 1 o 2 The following strategy of Player 1 wins with probability 1: At every step, play and uniformly at random. After each visit to {v 1,v 2 }, no matter the strategy of Player 2, Player 1 has probability to win (reach v 3 ).
144 Summary
145 Conclusion Games for controller synthesis: symbolic algorithms using fixpoint formulas. Imperfect information is more realistic, gives more robust controllers; but exponentially harder to solve. Antichains: exploit the structure of the subset construction.

146 Conclusion Games for controller synthesis: symbolic algorithms using fixpoint formulas. Imperfect information is more realistic, gives more robust controllers; but exponentially harder to solve. Antichains: exploit the structure of the subset construction. It is sufficient to keep only the maximal elements.
147 Conclusion The antichain principle has applications in other problems where subset constructions are used: Finite automata: language inclusion, universality, etc. [De Wulf,D,Henzinger,Raskin 06] Alternating Büchi automata: emptiness and language inclusion. [D,Raskin 07] LTL: satisfiability and model-checking. [De Wulf,D,Maquet,Raskin 08]
148 Alaska Antichains for Logic, Automata and Symbolic Kripke Structure Analysis
149 Acknowledgments Credits Antichains for games is a joint work with Krishnendu Chatterjee, Martin De Wulf, Tom Henzinger and Jean-François Raskin. Special thanks to Jean-François Raskin for slides preparation.
150 Thank you! Questions?
151
Static analysis of parity games: alternating reachability under parity
 8 January 2016, DTU Denmark Static analysis of parity games: alternating reachability under parity Michael Huth, Imperial College London Nir Piterman, University of Leicester Jim Huan-Pu Kuo, Imperial
8 January 2016, DTU Denmark Static analysis of parity games: alternating reachability under parity Michael Huth, Imperial College London Nir Piterman, University of Leicester Jim Huan-Pu Kuo, Imperial
Reliability Guarantees in Automata Based Scheduling for Embedded Control Software
 1 Reliability Guarantees in Automata Based Scheduling for Embedded Control Software Santhosh Prabhu, Aritra Hazra, Pallab Dasgupta Department of CSE, IIT Kharagpur West Bengal, India - 721302. Email: {santhosh.prabhu,
1 Reliability Guarantees in Automata Based Scheduling for Embedded Control Software Santhosh Prabhu, Aritra Hazra, Pallab Dasgupta Department of CSE, IIT Kharagpur West Bengal, India - 721302. Email: {santhosh.prabhu,
Static Program Transformations for Efficient Software Model Checking
 Static Program Transformations for Efficient Software Model Checking Shobha Vasudevan Jacob Abraham The University of Texas at Austin Dependable Systems Large and complex systems Software faults are major
Static Program Transformations for Efficient Software Model Checking Shobha Vasudevan Jacob Abraham The University of Texas at Austin Dependable Systems Large and complex systems Software faults are major
Today s Agenda. Automata and Logic. Quiz 4 Temporal Logic. Introduction Buchi Automata Linear Time Logic Summary
 Today s Agenda Quiz 4 Temporal Logic Formal Methods in Software Engineering 1 Automata and Logic Introduction Buchi Automata Linear Time Logic Summary Formal Methods in Software Engineering 2 1 Buchi Automata
Today s Agenda Quiz 4 Temporal Logic Formal Methods in Software Engineering 1 Automata and Logic Introduction Buchi Automata Linear Time Logic Summary Formal Methods in Software Engineering 2 1 Buchi Automata
Formal Languages and Automata Theory - Regular Expressions and Finite Automata -
 Formal Languages and Automata Theory - Regular Expressions and Finite Automata - Samarjit Chakraborty Computer Engineering and Networks Laboratory Swiss Federal Institute of Technology (ETH) Zürich March
Formal Languages and Automata Theory - Regular Expressions and Finite Automata - Samarjit Chakraborty Computer Engineering and Networks Laboratory Swiss Federal Institute of Technology (ETH) Zürich March
Testing LTL Formula Translation into Büchi Automata
 Testing LTL Formula Translation into Büchi Automata Heikki Tauriainen and Keijo Heljanko Helsinki University of Technology, Laboratory for Theoretical Computer Science, P. O. Box 5400, FIN-02015 HUT, Finland
Testing LTL Formula Translation into Büchi Automata Heikki Tauriainen and Keijo Heljanko Helsinki University of Technology, Laboratory for Theoretical Computer Science, P. O. Box 5400, FIN-02015 HUT, Finland
A Partial-Observation Stochastic Games: How to Win when Belief Fails
 A Partial-Observation Stochastic Games: How to Win when Belief Fails Krishnendu Chatterjee, IST Austria Laurent Doyen, LSV, ENS Cachan & CNRS, France In two-player finite-state stochastic games of partial
A Partial-Observation Stochastic Games: How to Win when Belief Fails Krishnendu Chatterjee, IST Austria Laurent Doyen, LSV, ENS Cachan & CNRS, France In two-player finite-state stochastic games of partial
Model Checking: An Introduction
 Announcements Model Checking: An Introduction Meeting 2 Office hours M 1:30pm-2:30pm W 5:30pm-6:30pm (after class) and by appointment ECOT 621 Moodle problems? Fundamentals of Programming Languages CSCI
Announcements Model Checking: An Introduction Meeting 2 Office hours M 1:30pm-2:30pm W 5:30pm-6:30pm (after class) and by appointment ECOT 621 Moodle problems? Fundamentals of Programming Languages CSCI
T-79.186 Reactive Systems: Introduction and Finite State Automata
 T-79.186 Reactive Systems: Introduction and Finite State Automata Timo Latvala 14.1.2004 Reactive Systems: Introduction and Finite State Automata 1-1 Reactive Systems Reactive systems are a class of software
T-79.186 Reactive Systems: Introduction and Finite State Automata Timo Latvala 14.1.2004 Reactive Systems: Introduction and Finite State Automata 1-1 Reactive Systems Reactive systems are a class of software
Doomsday Equilibria for Games on Graphs
 Doomsday Equilibria for Games on Graphs Krishnendu Chatterjee Laurent Doyen IST Austria LSV, ENS Cachan & CNRS Emmanuel Filiot Jean-François Raskin Université Libre de ruxelles U.L.. Two-player games on
Doomsday Equilibria for Games on Graphs Krishnendu Chatterjee Laurent Doyen IST Austria LSV, ENS Cachan & CNRS Emmanuel Filiot Jean-François Raskin Université Libre de ruxelles U.L.. Two-player games on
Reading 13 : Finite State Automata and Regular Expressions
 CS/Math 24: Introduction to Discrete Mathematics Fall 25 Reading 3 : Finite State Automata and Regular Expressions Instructors: Beck Hasti, Gautam Prakriya In this reading we study a mathematical model
CS/Math 24: Introduction to Discrete Mathematics Fall 25 Reading 3 : Finite State Automata and Regular Expressions Instructors: Beck Hasti, Gautam Prakriya In this reading we study a mathematical model
Automata-based Verification - I
 CS3172: Advanced Algorithms Automata-based Verification - I Howard Barringer Room KB2.20: email: howard.barringer@manchester.ac.uk March 2006 Supporting and Background Material Copies of key slides (already
CS3172: Advanced Algorithms Automata-based Verification - I Howard Barringer Room KB2.20: email: howard.barringer@manchester.ac.uk March 2006 Supporting and Background Material Copies of key slides (already
Class notes Program Analysis course given by Prof. Mooly Sagiv Computer Science Department, Tel Aviv University second lecture 8/3/2007
 Constant Propagation Class notes Program Analysis course given by Prof. Mooly Sagiv Computer Science Department, Tel Aviv University second lecture 8/3/2007 Osnat Minz and Mati Shomrat Introduction This
Constant Propagation Class notes Program Analysis course given by Prof. Mooly Sagiv Computer Science Department, Tel Aviv University second lecture 8/3/2007 Osnat Minz and Mati Shomrat Introduction This
Regular Expressions and Automata using Haskell
 Regular Expressions and Automata using Haskell Simon Thompson Computing Laboratory University of Kent at Canterbury January 2000 Contents 1 Introduction 2 2 Regular Expressions 2 3 Matching regular expressions
Regular Expressions and Automata using Haskell Simon Thompson Computing Laboratory University of Kent at Canterbury January 2000 Contents 1 Introduction 2 2 Regular Expressions 2 3 Matching regular expressions
The Model Checker SPIN
 The Model Checker SPIN Author: Gerard J. Holzmann Presented By: Maulik Patel Outline Introduction Structure Foundation Algorithms Memory management Example/Demo SPIN-Introduction Introduction SPIN (Simple(
The Model Checker SPIN Author: Gerard J. Holzmann Presented By: Maulik Patel Outline Introduction Structure Foundation Algorithms Memory management Example/Demo SPIN-Introduction Introduction SPIN (Simple(
Measuring the Performance of an Agent
 25 Measuring the Performance of an Agent The rational agent that we are aiming at should be successful in the task it is performing To assess the success we need to have a performance measure What is rational
25 Measuring the Performance of an Agent The rational agent that we are aiming at should be successful in the task it is performing To assess the success we need to have a performance measure What is rational
Properties of Stabilizing Computations
 Theory and Applications of Mathematics & Computer Science 5 (1) (2015) 71 93 Properties of Stabilizing Computations Mark Burgin a a University of California, Los Angeles 405 Hilgard Ave. Los Angeles, CA
Theory and Applications of Mathematics & Computer Science 5 (1) (2015) 71 93 Properties of Stabilizing Computations Mark Burgin a a University of California, Los Angeles 405 Hilgard Ave. Los Angeles, CA
The positive minimum degree game on sparse graphs
 The positive minimum degree game on sparse graphs József Balogh Department of Mathematical Sciences University of Illinois, USA jobal@math.uiuc.edu András Pluhár Department of Computer Science University
The positive minimum degree game on sparse graphs József Balogh Department of Mathematical Sciences University of Illinois, USA jobal@math.uiuc.edu András Pluhár Department of Computer Science University
Finite Automata. Reading: Chapter 2
 Finite Automata Reading: Chapter 2 1 Finite Automaton (FA) Informally, a state diagram that comprehensively captures all possible states and transitions that a machine can take while responding to a stream
Finite Automata Reading: Chapter 2 1 Finite Automaton (FA) Informally, a state diagram that comprehensively captures all possible states and transitions that a machine can take while responding to a stream
Information Theory and Coding Prof. S. N. Merchant Department of Electrical Engineering Indian Institute of Technology, Bombay
 Information Theory and Coding Prof. S. N. Merchant Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 17 Shannon-Fano-Elias Coding and Introduction to Arithmetic Coding
Information Theory and Coding Prof. S. N. Merchant Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 17 Shannon-Fano-Elias Coding and Introduction to Arithmetic Coding
Regular Languages and Finite Automata
 Regular Languages and Finite Automata 1 Introduction Hing Leung Department of Computer Science New Mexico State University Sep 16, 2010 In 1943, McCulloch and Pitts [4] published a pioneering work on a
Regular Languages and Finite Automata 1 Introduction Hing Leung Department of Computer Science New Mexico State University Sep 16, 2010 In 1943, McCulloch and Pitts [4] published a pioneering work on a
Omega Automata: Minimization and Learning 1
 Omega Automata: Minimization and Learning 1 Oded Maler CNRS - VERIMAG Grenoble, France 2007 1 Joint work with A. Pnueli, late 80s Summary Machine learning in general and of formal languages in particular
Omega Automata: Minimization and Learning 1 Oded Maler CNRS - VERIMAG Grenoble, France 2007 1 Joint work with A. Pnueli, late 80s Summary Machine learning in general and of formal languages in particular
Algorithmic Software Verification
 Algorithmic Software Verification (LTL Model Checking) Azadeh Farzan What is Verification Anyway? Proving (in a formal way) that program satisfies a specification written in a logical language. Formal
Algorithmic Software Verification (LTL Model Checking) Azadeh Farzan What is Verification Anyway? Proving (in a formal way) that program satisfies a specification written in a logical language. Formal
MetaGame: An Animation Tool for Model-Checking Games
 MetaGame: An Animation Tool for Model-Checking Games Markus Müller-Olm 1 and Haiseung Yoo 2 1 FernUniversität in Hagen, Fachbereich Informatik, LG PI 5 Universitätsstr. 1, 58097 Hagen, Germany mmo@ls5.informatik.uni-dortmund.de
MetaGame: An Animation Tool for Model-Checking Games Markus Müller-Olm 1 and Haiseung Yoo 2 1 FernUniversität in Hagen, Fachbereich Informatik, LG PI 5 Universitätsstr. 1, 58097 Hagen, Germany mmo@ls5.informatik.uni-dortmund.de
Informatique Fondamentale IMA S8
 Informatique Fondamentale IMA S8 Cours 1 - Intro + schedule + finite state machines Laure Gonnord http://laure.gonnord.org/pro/teaching/ Laure.Gonnord@polytech-lille.fr Université Lille 1 - Polytech Lille
Informatique Fondamentale IMA S8 Cours 1 - Intro + schedule + finite state machines Laure Gonnord http://laure.gonnord.org/pro/teaching/ Laure.Gonnord@polytech-lille.fr Université Lille 1 - Polytech Lille
Software Modeling and Verification
 Software Modeling and Verification Alessandro Aldini DiSBeF - Sezione STI University of Urbino Carlo Bo Italy 3-4 February 2015 Algorithmic verification Correctness problem Is the software/hardware system
Software Modeling and Verification Alessandro Aldini DiSBeF - Sezione STI University of Urbino Carlo Bo Italy 3-4 February 2015 Algorithmic verification Correctness problem Is the software/hardware system
Near Optimal Solutions
 Near Optimal Solutions Many important optimization problems are lacking efficient solutions. NP-Complete problems unlikely to have polynomial time solutions. Good heuristics important for such problems.
Near Optimal Solutions Many important optimization problems are lacking efficient solutions. NP-Complete problems unlikely to have polynomial time solutions. Good heuristics important for such problems.
Runtime Verification for Real-Time Automotive Embedded Software
 Runtime Verification for Real-Time Automotive Embedded Software S. Cotard, S. Faucou, J.-L. Béchennec, A. Queudet, Y. Trinquet 10th school of Modelling and Verifying Parallel processes (MOVEP) Runtime
Runtime Verification for Real-Time Automotive Embedded Software S. Cotard, S. Faucou, J.-L. Béchennec, A. Queudet, Y. Trinquet 10th school of Modelling and Verifying Parallel processes (MOVEP) Runtime
Factoring & Primality
 Factoring & Primality Lecturer: Dimitris Papadopoulos In this lecture we will discuss the problem of integer factorization and primality testing, two problems that have been the focus of a great amount
Factoring & Primality Lecturer: Dimitris Papadopoulos In this lecture we will discuss the problem of integer factorization and primality testing, two problems that have been the focus of a great amount
4.6 The Primitive Recursive Functions
 4.6. THE PRIMITIVE RECURSIVE FUNCTIONS 309 4.6 The Primitive Recursive Functions The class of primitive recursive functions is defined in terms of base functions and closure operations. Definition 4.6.1
4.6. THE PRIMITIVE RECURSIVE FUNCTIONS 309 4.6 The Primitive Recursive Functions The class of primitive recursive functions is defined in terms of base functions and closure operations. Definition 4.6.1
Formal Verification of Software
 Formal Verification of Software Sabine Broda Department of Computer Science/FCUP 12 de Novembro de 2014 Sabine Broda (DCC-FCUP) Formal Verification of Software 12 de Novembro de 2014 1 / 26 Formal Verification
Formal Verification of Software Sabine Broda Department of Computer Science/FCUP 12 de Novembro de 2014 Sabine Broda (DCC-FCUP) Formal Verification of Software 12 de Novembro de 2014 1 / 26 Formal Verification
(IALC, Chapters 8 and 9) Introduction to Turing s life, Turing machines, universal machines, unsolvable problems.
 Introduction to Turing s life, Turing machines, universal machines, unsolvable problems.") 3130CIT: Theory of Computation Turing machines and undecidability (IALC, Chapters 8 and 9) Introduction to Turing s life, Turing machines, universal machines, unsolvable problems. An undecidable problem
3130CIT: Theory of Computation Turing machines and undecidability (IALC, Chapters 8 and 9) Introduction to Turing s life, Turing machines, universal machines, unsolvable problems. An undecidable problem
CSE 135: Introduction to Theory of Computation Decidability and Recognizability
 CSE 135: Introduction to Theory of Computation Decidability and Recognizability Sungjin Im University of California, Merced 04-28, 30-2014 High-Level Descriptions of Computation Instead of giving a Turing
CSE 135: Introduction to Theory of Computation Decidability and Recognizability Sungjin Im University of California, Merced 04-28, 30-2014 High-Level Descriptions of Computation Instead of giving a Turing
ω-automata Automata that accept (or reject) words of infinite length. Languages of infinite words appear:
 words of infinite length. Languages of infinite words appear:") ω-automata ω-automata Automata that accept (or reject) words of infinite length. Languages of infinite words appear: in verification, as encodings of non-terminating executions of a program. in arithmetic,
ω-automata ω-automata Automata that accept (or reject) words of infinite length. Languages of infinite words appear: in verification, as encodings of non-terminating executions of a program. in arithmetic,
Polarization codes and the rate of polarization
 Polarization codes and the rate of polarization Erdal Arıkan, Emre Telatar Bilkent U., EPFL Sept 10, 2008 Channel Polarization Given a binary input DMC W, i.i.d. uniformly distributed inputs (X 1,...,
Polarization codes and the rate of polarization Erdal Arıkan, Emre Telatar Bilkent U., EPFL Sept 10, 2008 Channel Polarization Given a binary input DMC W, i.i.d. uniformly distributed inputs (X 1,...,
Lecture 13 - Basic Number Theory.
 Lecture 13 - Basic Number Theory. Boaz Barak March 22, 2010 Divisibility and primes Unless mentioned otherwise throughout this lecture all numbers are non-negative integers. We say that A divides B, denoted
Lecture 13 - Basic Number Theory. Boaz Barak March 22, 2010 Divisibility and primes Unless mentioned otherwise throughout this lecture all numbers are non-negative integers. We say that A divides B, denoted
Formal Verification Problems in a Bigdata World: Towards a Mighty Synergy
 Dept. of Computer Science Formal Verification Problems in a Bigdata World: Towards a Mighty Synergy Matteo Camilli matteo.camilli@unimi.it http://camilli.di.unimi.it ICSE 2014 Hyderabad, India June 3,
Dept. of Computer Science Formal Verification Problems in a Bigdata World: Towards a Mighty Synergy Matteo Camilli matteo.camilli@unimi.it http://camilli.di.unimi.it ICSE 2014 Hyderabad, India June 3,
Embeddability and Decidability in the Turing Degrees
 ASL Summer Meeting Logic Colloquium 06. Embeddability and Decidability in the Turing Degrees Antonio Montalbán. University of Chicago Nijmegen, Netherlands, 27 July- 2 Aug. of 2006 1 Jump upper semilattice
ASL Summer Meeting Logic Colloquium 06. Embeddability and Decidability in the Turing Degrees Antonio Montalbán. University of Chicago Nijmegen, Netherlands, 27 July- 2 Aug. of 2006 1 Jump upper semilattice
Chapter 3. Cartesian Products and Relations. 3.1 Cartesian Products
 Chapter 3 Cartesian Products and Relations The material in this chapter is the first real encounter with abstraction. Relations are very general thing they are a special type of subset. After introducing
Chapter 3 Cartesian Products and Relations The material in this chapter is the first real encounter with abstraction. Relations are very general thing they are a special type of subset. After introducing
6.080/6.089 GITCS Feb 12, 2008. Lecture 3
 6.8/6.89 GITCS Feb 2, 28 Lecturer: Scott Aaronson Lecture 3 Scribe: Adam Rogal Administrivia. Scribe notes The purpose of scribe notes is to transcribe our lectures. Although I have formal notes of my
6.8/6.89 GITCS Feb 2, 28 Lecturer: Scott Aaronson Lecture 3 Scribe: Adam Rogal Administrivia. Scribe notes The purpose of scribe notes is to transcribe our lectures. Although I have formal notes of my
Chapter ML:IV. IV. Statistical Learning. Probability Basics Bayes Classification Maximum a-posteriori Hypotheses
 Chapter ML:IV IV. Statistical Learning Probability Basics Bayes Classification Maximum a-posteriori Hypotheses ML:IV-1 Statistical Learning STEIN 2005-2015 Area Overview Mathematics Statistics...... Stochastics
Chapter ML:IV IV. Statistical Learning Probability Basics Bayes Classification Maximum a-posteriori Hypotheses ML:IV-1 Statistical Learning STEIN 2005-2015 Area Overview Mathematics Statistics...... Stochastics
logic language, static/dynamic models SAT solvers Verified Software Systems 1 How can we model check of a program or system?
 5. LTL, CTL Last part: Alloy logic language, static/dynamic models SAT solvers Today: Temporal Logic (LTL, CTL) Verified Software Systems 1 Overview How can we model check of a program or system? Modeling
5. LTL, CTL Last part: Alloy logic language, static/dynamic models SAT solvers Today: Temporal Logic (LTL, CTL) Verified Software Systems 1 Overview How can we model check of a program or system? Modeling
Enforcing Security Policies. Rahul Gera
 Enforcing Security Policies Rahul Gera Brief overview Security policies and Execution Monitoring. Policies that can be enforced using EM. An automata based formalism for specifying those security policies.
Enforcing Security Policies Rahul Gera Brief overview Security policies and Execution Monitoring. Policies that can be enforced using EM. An automata based formalism for specifying those security policies.
On Recognizable Timed Languages FOSSACS 2004
 On Recognizable Timed Languages Oded Maler VERIMAG Grenoble France Amir Pnueli NYU and Weizmann New York and Rehovot USA FOSSACS 2004 Nutrition Facts Classical (Untimed) Recognizability Timed Languages
On Recognizable Timed Languages Oded Maler VERIMAG Grenoble France Amir Pnueli NYU and Weizmann New York and Rehovot USA FOSSACS 2004 Nutrition Facts Classical (Untimed) Recognizability Timed Languages
LOOKING FOR A GOOD TIME TO BET
 LOOKING FOR A GOOD TIME TO BET LAURENT SERLET Abstract. Suppose that the cards of a well shuffled deck of cards are turned up one after another. At any time-but once only- you may bet that the next card
LOOKING FOR A GOOD TIME TO BET LAURENT SERLET Abstract. Suppose that the cards of a well shuffled deck of cards are turned up one after another. At any time-but once only- you may bet that the next card
Automata on Infinite Words and Trees
 Automata on Infinite Words and Trees Course notes for the course Automata on Infinite Words and Trees given by Dr. Meghyn Bienvenu at Universität Bremen in the 2009-2010 winter semester Last modified:
Automata on Infinite Words and Trees Course notes for the course Automata on Infinite Words and Trees given by Dr. Meghyn Bienvenu at Universität Bremen in the 2009-2010 winter semester Last modified:
1 if 1 x 0 1 if 0 x 1
 Chapter 3 Continuity In this chapter we begin by defining the fundamental notion of continuity for real valued functions of a single real variable. When trying to decide whether a given function is or
Chapter 3 Continuity In this chapter we begin by defining the fundamental notion of continuity for real valued functions of a single real variable. When trying to decide whether a given function is or
6.207/14.15: Networks Lecture 15: Repeated Games and Cooperation
 6.207/14.15: Networks Lecture 15: Repeated Games and Cooperation Daron Acemoglu and Asu Ozdaglar MIT November 2, 2009 1 Introduction Outline The problem of cooperation Finitely-repeated prisoner s dilemma
6.207/14.15: Networks Lecture 15: Repeated Games and Cooperation Daron Acemoglu and Asu Ozdaglar MIT November 2, 2009 1 Introduction Outline The problem of cooperation Finitely-repeated prisoner s dilemma
Computationally Complete Spiking Neural P Systems Without Delay: Two Types of Neurons Are Enough
 Computationally Complete Spiking Neural P Systems Without Delay: Two Types of Neurons Are Enough Rudolf Freund 1 and Marian Kogler 1,2 1 Faculty of Informatics, Vienna University of Technology Favoritenstr.
Computationally Complete Spiking Neural P Systems Without Delay: Two Types of Neurons Are Enough Rudolf Freund 1 and Marian Kogler 1,2 1 Faculty of Informatics, Vienna University of Technology Favoritenstr.
n 2 + 4n + 3. The answer in decimal form (for the Blitz): 0, 75. Solution. (n + 1)(n + 3) = n + 3 2 lim m 2 1
: 0, 75. Solution. (n + 1)(n + 3) = n + 3 2 lim m 2 1") . Calculate the sum of the series Answer: 3 4. n 2 + 4n + 3. The answer in decimal form (for the Blitz):, 75. Solution. n 2 + 4n + 3 = (n + )(n + 3) = (n + 3) (n + ) = 2 (n + )(n + 3) ( 2 n + ) = m ( n
. Calculate the sum of the series Answer: 3 4. n 2 + 4n + 3. The answer in decimal form (for the Blitz):, 75. Solution. n 2 + 4n + 3 = (n + )(n + 3) = (n + 3) (n + ) = 2 (n + )(n + 3) ( 2 n + ) = m ( n
PETRI NET BASED SUPERVISORY CONTROL OF FLEXIBLE BATCH PLANTS. G. Mušič and D. Matko
 PETRI NET BASED SUPERVISORY CONTROL OF FLEXIBLE BATCH PLANTS G. Mušič and D. Matko Faculty of Electrical Engineering, University of Ljubljana, Slovenia. E-mail: gasper.music@fe.uni-lj.si Abstract: The
PETRI NET BASED SUPERVISORY CONTROL OF FLEXIBLE BATCH PLANTS G. Mušič and D. Matko Faculty of Electrical Engineering, University of Ljubljana, Slovenia. E-mail: gasper.music@fe.uni-lj.si Abstract: The
6.045: Automata, Computability, and Complexity Or, Great Ideas in Theoretical Computer Science Spring, 2010. Class 4 Nancy Lynch
 6.045: Automata, Computability, and Complexity Or, Great Ideas in Theoretical Computer Science Spring, 2010 Class 4 Nancy Lynch Today Two more models of computation: Nondeterministic Finite Automata (NFAs)
6.045: Automata, Computability, and Complexity Or, Great Ideas in Theoretical Computer Science Spring, 2010 Class 4 Nancy Lynch Today Two more models of computation: Nondeterministic Finite Automata (NFAs)
Handling Fault Detection Latencies in Automata-based Scheduling for Embedded Control Software
 Handling Fault Detection atencies in Automata-based cheduling for Embedded Control oftware anthosh Prabhu M, Aritra Hazra, Pallab Dasgupta and P. P. Chakrabarti Department of Computer cience and Engineering,
Handling Fault Detection atencies in Automata-based cheduling for Embedded Control oftware anthosh Prabhu M, Aritra Hazra, Pallab Dasgupta and P. P. Chakrabarti Department of Computer cience and Engineering,
Load Balancing and Switch Scheduling
 EE384Y Project Final Report Load Balancing and Switch Scheduling Xiangheng Liu Department of Electrical Engineering Stanford University, Stanford CA 94305 Email: liuxh@systems.stanford.edu Abstract Load
EE384Y Project Final Report Load Balancing and Switch Scheduling Xiangheng Liu Department of Electrical Engineering Stanford University, Stanford CA 94305 Email: liuxh@systems.stanford.edu Abstract Load
Midterm Practice Problems
 6.042/8.062J Mathematics for Computer Science October 2, 200 Tom Leighton, Marten van Dijk, and Brooke Cowan Midterm Practice Problems Problem. [0 points] In problem set you showed that the nand operator
6.042/8.062J Mathematics for Computer Science October 2, 200 Tom Leighton, Marten van Dijk, and Brooke Cowan Midterm Practice Problems Problem. [0 points] In problem set you showed that the nand operator
On Omega-Languages Defined by Mean-Payoff Conditions
 On Omega-Languages Defined by Mean-Payoff Conditions Rajeev Alur 1, Aldric Degorre 2, Oded Maler 2, Gera Weiss 1 1 Dept. of Computer and Information Science, University of Pennsylvania, USA {alur, gera}@cis.upenn.edu
On Omega-Languages Defined by Mean-Payoff Conditions Rajeev Alur 1, Aldric Degorre 2, Oded Maler 2, Gera Weiss 1 1 Dept. of Computer and Information Science, University of Pennsylvania, USA {alur, gera}@cis.upenn.edu
FEGYVERNEKI SÁNDOR, PROBABILITY THEORY AND MATHEmATICAL
 FEGYVERNEKI SÁNDOR, PROBABILITY THEORY AND MATHEmATICAL STATIsTICs 4 IV. RANDOm VECTORs 1. JOINTLY DIsTRIBUTED RANDOm VARIABLEs If are two rom variables defined on the same sample space we define the joint
FEGYVERNEKI SÁNDOR, PROBABILITY THEORY AND MATHEmATICAL STATIsTICs 4 IV. RANDOm VECTORs 1. JOINTLY DIsTRIBUTED RANDOm VARIABLEs If are two rom variables defined on the same sample space we define the joint
Formal Verification and Linear-time Model Checking
 Formal Verification and Linear-time Model Checking Paul Jackson University of Edinburgh Automated Reasoning 21st and 24th October 2013 Why Automated Reasoning? Intellectually stimulating and challenging
Formal Verification and Linear-time Model Checking Paul Jackson University of Edinburgh Automated Reasoning 21st and 24th October 2013 Why Automated Reasoning? Intellectually stimulating and challenging
Finite Automata. Reading: Chapter 2
 Finite Automata Reading: Chapter 2 1 Finite Automata Informally, a state machine that comprehensively captures all possible states and transitions that a machine can take while responding to a stream (or
Finite Automata Reading: Chapter 2 1 Finite Automata Informally, a state machine that comprehensively captures all possible states and transitions that a machine can take while responding to a stream (or
Fixed-Point Logics and Computation
 1 Fixed-Point Logics and Computation Symposium on the Unusual Effectiveness of Logic in Computer Science University of Cambridge 2 Mathematical Logic Mathematical logic seeks to formalise the process of
1 Fixed-Point Logics and Computation Symposium on the Unusual Effectiveness of Logic in Computer Science University of Cambridge 2 Mathematical Logic Mathematical logic seeks to formalise the process of
Notes from Week 1: Algorithms for sequential prediction
 CS 683 Learning, Games, and Electronic Markets Spring 2007 Notes from Week 1: Algorithms for sequential prediction Instructor: Robert Kleinberg 22-26 Jan 2007 1 Introduction In this course we will be looking
CS 683 Learning, Games, and Electronic Markets Spring 2007 Notes from Week 1: Algorithms for sequential prediction Instructor: Robert Kleinberg 22-26 Jan 2007 1 Introduction In this course we will be looking
Reinforcement Learning
 Reinforcement Learning LU 2 - Markov Decision Problems and Dynamic Programming Dr. Martin Lauer AG Maschinelles Lernen und Natürlichsprachliche Systeme Albert-Ludwigs-Universität Freiburg martin.lauer@kit.edu
Reinforcement Learning LU 2 - Markov Decision Problems and Dynamic Programming Dr. Martin Lauer AG Maschinelles Lernen und Natürlichsprachliche Systeme Albert-Ludwigs-Universität Freiburg martin.lauer@kit.edu
Adaptive Online Gradient Descent
 Adaptive Online Gradient Descent Peter L Bartlett Division of Computer Science Department of Statistics UC Berkeley Berkeley, CA 94709 bartlett@csberkeleyedu Elad Hazan IBM Almaden Research Center 650
Adaptive Online Gradient Descent Peter L Bartlett Division of Computer Science Department of Statistics UC Berkeley Berkeley, CA 94709 bartlett@csberkeleyedu Elad Hazan IBM Almaden Research Center 650
Lecture 22: November 10
 CS271 Randomness & Computation Fall 2011 Lecture 22: November 10 Lecturer: Alistair Sinclair Based on scribe notes by Rafael Frongillo Disclaimer: These notes have not been subjected to the usual scrutiny
CS271 Randomness & Computation Fall 2011 Lecture 22: November 10 Lecturer: Alistair Sinclair Based on scribe notes by Rafael Frongillo Disclaimer: These notes have not been subjected to the usual scrutiny
Fabio Patrizi DIS Sapienza - University of Rome
 Fabio Patrizi DIS Sapienza - University of Rome Overview Introduction to Services The Composition Problem Two frameworks for composition: Non data-aware services Data-aware services Conclusion & Research
Fabio Patrizi DIS Sapienza - University of Rome Overview Introduction to Services The Composition Problem Two frameworks for composition: Non data-aware services Data-aware services Conclusion & Research
No: 10 04. Bilkent University. Monotonic Extension. Farhad Husseinov. Discussion Papers. Department of Economics
 No: 10 04 Bilkent University Monotonic Extension Farhad Husseinov Discussion Papers Department of Economics The Discussion Papers of the Department of Economics are intended to make the initial results
No: 10 04 Bilkent University Monotonic Extension Farhad Husseinov Discussion Papers Department of Economics The Discussion Papers of the Department of Economics are intended to make the initial results
Data Streams A Tutorial
 Data Streams A Tutorial Nicole Schweikardt Goethe-Universität Frankfurt am Main DEIS 10: GI-Dagstuhl Seminar on Data Exchange, Integration, and Streams Schloss Dagstuhl, November 8, 2010 Data Streams Situation:
Data Streams A Tutorial Nicole Schweikardt Goethe-Universität Frankfurt am Main DEIS 10: GI-Dagstuhl Seminar on Data Exchange, Integration, and Streams Schloss Dagstuhl, November 8, 2010 Data Streams Situation:
6.042/18.062J Mathematics for Computer Science December 12, 2006 Tom Leighton and Ronitt Rubinfeld. Random Walks
 6.042/8.062J Mathematics for Comuter Science December 2, 2006 Tom Leighton and Ronitt Rubinfeld Lecture Notes Random Walks Gambler s Ruin Today we re going to talk about one-dimensional random walks. In
6.042/8.062J Mathematics for Comuter Science December 2, 2006 Tom Leighton and Ronitt Rubinfeld Lecture Notes Random Walks Gambler s Ruin Today we re going to talk about one-dimensional random walks. In
Integer Programming Formulation
 Integer Programming Formulation 1 Integer Programming Introduction When we introduced linear programs in Chapter 1, we mentioned divisibility as one of the LP assumptions. Divisibility allowed us to consider
Integer Programming Formulation 1 Integer Programming Introduction When we introduced linear programs in Chapter 1, we mentioned divisibility as one of the LP assumptions. Divisibility allowed us to consider
MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.436J/15.085J Fall 2008 Lecture 5 9/17/2008 RANDOM VARIABLES
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.436J/15.085J Fall 2008 Lecture 5 9/17/2008 RANDOM VARIABLES Contents 1. Random variables and measurable functions 2. Cumulative distribution functions 3. Discrete
MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.436J/15.085J Fall 2008 Lecture 5 9/17/2008 RANDOM VARIABLES Contents 1. Random variables and measurable functions 2. Cumulative distribution functions 3. Discrete
Welcome to... Problem Analysis and Complexity Theory 716.054, 3 VU
 Welcome to... Problem Analysis and Complexity Theory 716.054, 3 VU Birgit Vogtenhuber Institute for Software Technology email: bvogt@ist.tugraz.at office hour: Tuesday 10:30 11:30 slides: http://www.ist.tugraz.at/pact.html
Welcome to... Problem Analysis and Complexity Theory 716.054, 3 VU Birgit Vogtenhuber Institute for Software Technology email: bvogt@ist.tugraz.at office hour: Tuesday 10:30 11:30 slides: http://www.ist.tugraz.at/pact.html
Notes on Complexity Theory Last updated: August, 2011. Lecture 1
 Notes on Complexity Theory Last updated: August, 2011 Jonathan Katz Lecture 1 1 Turing Machines I assume that most students have encountered Turing machines before. (Students who have not may want to look
Notes on Complexity Theory Last updated: August, 2011 Jonathan Katz Lecture 1 1 Turing Machines I assume that most students have encountered Turing machines before. (Students who have not may want to look
10.2 Series and Convergence
 10.2 Series and Convergence Write sums using sigma notation Find the partial sums of series and determine convergence or divergence of infinite series Find the N th partial sums of geometric series and
10.2 Series and Convergence Write sums using sigma notation Find the partial sums of series and determine convergence or divergence of infinite series Find the N th partial sums of geometric series and
Semantics and Verification of Software
 Semantics and Verification of Software Lecture 21: Nondeterminism and Parallelism IV (Equivalence of CCS Processes & Wrap-Up) Thomas Noll Lehrstuhl für Informatik 2 (Software Modeling and Verification)
Semantics and Verification of Software Lecture 21: Nondeterminism and Parallelism IV (Equivalence of CCS Processes & Wrap-Up) Thomas Noll Lehrstuhl für Informatik 2 (Software Modeling and Verification)
An Introduction to Hybrid Automata
 An Introduction to Hybrid Automata Jean-François Raskin, email: jraskin@ulb.ac.be Computer Science Department University of Brussels Belgium 1 Introduction Hybrid systems are digital real-time systems
An Introduction to Hybrid Automata Jean-François Raskin, email: jraskin@ulb.ac.be Computer Science Department University of Brussels Belgium 1 Introduction Hybrid systems are digital real-time systems
SYNTHESIS FROM PROBABILISTIC COMPONENTS
 Logical Methods in Computer Science Vol. 10(2:17)2014, pp. 1 24 www.lmcs-online.org Submitted Feb. 29, 2012 Published Jun. 30, 2014 SYNTHESIS FROM PROBABILISTIC COMPONENTS YOAD LUSTIG a, SUMIT NAIN b,
Logical Methods in Computer Science Vol. 10(2:17)2014, pp. 1 24 www.lmcs-online.org Submitted Feb. 29, 2012 Published Jun. 30, 2014 SYNTHESIS FROM PROBABILISTIC COMPONENTS YOAD LUSTIG a, SUMIT NAIN b,
Cost Model: Work, Span and Parallelism. 1 The RAM model for sequential computation:
 CSE341T 08/31/2015 Lecture 3 Cost Model: Work, Span and Parallelism In this lecture, we will look at how one analyze a parallel program written using Cilk Plus. When we analyze the cost of an algorithm
CSE341T 08/31/2015 Lecture 3 Cost Model: Work, Span and Parallelism In this lecture, we will look at how one analyze a parallel program written using Cilk Plus. When we analyze the cost of an algorithm
CSC2420 Fall 2012: Algorithm Design, Analysis and Theory
 CSC2420 Fall 2012: Algorithm Design, Analysis and Theory Allan Borodin November 15, 2012; Lecture 10 1 / 27 Randomized online bipartite matching and the adwords problem. We briefly return to online algorithms
CSC2420 Fall 2012: Algorithm Design, Analysis and Theory Allan Borodin November 15, 2012; Lecture 10 1 / 27 Randomized online bipartite matching and the adwords problem. We briefly return to online algorithms
Reinforcement Learning
 Reinforcement Learning LU 2 - Markov Decision Problems and Dynamic Programming Dr. Joschka Bödecker AG Maschinelles Lernen und Natürlichsprachliche Systeme Albert-Ludwigs-Universität Freiburg jboedeck@informatik.uni-freiburg.de
Reinforcement Learning LU 2 - Markov Decision Problems and Dynamic Programming Dr. Joschka Bödecker AG Maschinelles Lernen und Natürlichsprachliche Systeme Albert-Ludwigs-Universität Freiburg jboedeck@informatik.uni-freiburg.de
Lecture Note 1 Set and Probability Theory. MIT 14.30 Spring 2006 Herman Bennett
 Lecture Note 1 Set and Probability Theory MIT 14.30 Spring 2006 Herman Bennett 1 Set Theory 1.1 Definitions and Theorems 1. Experiment: any action or process whose outcome is subject to uncertainty. 2.
Lecture Note 1 Set and Probability Theory MIT 14.30 Spring 2006 Herman Bennett 1 Set Theory 1.1 Definitions and Theorems 1. Experiment: any action or process whose outcome is subject to uncertainty. 2.
Generating models of a matched formula with a polynomial delay
 Generating models of a matched formula with a polynomial delay Petr Savicky Institute of Computer Science, Academy of Sciences of Czech Republic, Pod Vodárenskou Věží 2, 182 07 Praha 8, Czech Republic
Generating models of a matched formula with a polynomial delay Petr Savicky Institute of Computer Science, Academy of Sciences of Czech Republic, Pod Vodárenskou Věží 2, 182 07 Praha 8, Czech Republic
Introduction to Logic in Computer Science: Autumn 2006
 Introduction to Logic in Computer Science: Autumn 2006 Ulle Endriss Institute for Logic, Language and Computation University of Amsterdam Ulle Endriss 1 Plan for Today Now that we have a basic understanding
Introduction to Logic in Computer Science: Autumn 2006 Ulle Endriss Institute for Logic, Language and Computation University of Amsterdam Ulle Endriss 1 Plan for Today Now that we have a basic understanding
Regular Languages and Finite State Machines
 Regular Languages and Finite State Machines Plan for the Day: Mathematical preliminaries - some review One application formal definition of finite automata Examples 1 Sets A set is an unordered collection
Regular Languages and Finite State Machines Plan for the Day: Mathematical preliminaries - some review One application formal definition of finite automata Examples 1 Sets A set is an unordered collection
Mathematical Induction
 Mathematical Induction (Handout March 8, 01) The Principle of Mathematical Induction provides a means to prove infinitely many statements all at once The principle is logical rather than strictly mathematical,
Mathematical Induction (Handout March 8, 01) The Principle of Mathematical Induction provides a means to prove infinitely many statements all at once The principle is logical rather than strictly mathematical,
Turing Degrees and Definability of the Jump. Theodore A. Slaman. University of California, Berkeley. CJuly, 2005
 Turing Degrees and Definability of the Jump Theodore A. Slaman University of California, Berkeley CJuly, 2005 Outline Lecture 1 Forcing in arithmetic Coding and decoding theorems Automorphisms of countable
Turing Degrees and Definability of the Jump Theodore A. Slaman University of California, Berkeley CJuly, 2005 Outline Lecture 1 Forcing in arithmetic Coding and decoding theorems Automorphisms of countable
So let us begin our quest to find the holy grail of real analysis.
 1 Section 5.2 The Complete Ordered Field: Purpose of Section We present an axiomatic description of the real numbers as a complete ordered field. The axioms which describe the arithmetic of the real numbers
1 Section 5.2 The Complete Ordered Field: Purpose of Section We present an axiomatic description of the real numbers as a complete ordered field. The axioms which describe the arithmetic of the real numbers
Solutions for Practice problems on proofs
 Solutions for Practice problems on proofs Definition: (even) An integer n Z is even if and only if n = 2m for some number m Z. Definition: (odd) An integer n Z is odd if and only if n = 2m + 1 for some
Solutions for Practice problems on proofs Definition: (even) An integer n Z is even if and only if n = 2m for some number m Z. Definition: (odd) An integer n Z is odd if and only if n = 2m + 1 for some
Verification of hybrid dynamical systems
 Verification of hybrid dynamical systems Jüri Vain Tallinn Technical University/Institute of Cybernetics vain@ioc.ee Outline What are Hybrid Systems? Hybrid automata Verification of hybrid systems Verification
Verification of hybrid dynamical systems Jüri Vain Tallinn Technical University/Institute of Cybernetics vain@ioc.ee Outline What are Hybrid Systems? Hybrid automata Verification of hybrid systems Verification
On Winning Conditions of High Borel Complexity in Pushdown Games
 Fundamenta Informaticae (2005) 1 22 1 IOS Press On Winning Conditions of High Borel Complexity in Pushdown Games Olivier Finkel Equipe de Logique Mathématique U.F.R. de Mathématiques, Université Paris
Fundamenta Informaticae (2005) 1 22 1 IOS Press On Winning Conditions of High Borel Complexity in Pushdown Games Olivier Finkel Equipe de Logique Mathématique U.F.R. de Mathématiques, Université Paris
Combining Software and Hardware Verification Techniques
 Formal Methods in System Design, 21, 251 280, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Combining Software and Hardware Verification Techniques ROBERT P. KURSHAN VLADIMIR
Formal Methods in System Design, 21, 251 280, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Combining Software and Hardware Verification Techniques ROBERT P. KURSHAN VLADIMIR
Exponential time algorithms for graph coloring
 Exponential time algorithms for graph coloring Uriel Feige Lecture notes, March 14, 2011 1 Introduction Let [n] denote the set {1,..., k}. A k-labeling of vertices of a graph G(V, E) is a function V [k].
Exponential time algorithms for graph coloring Uriel Feige Lecture notes, March 14, 2011 1 Introduction Let [n] denote the set {1,..., k}. A k-labeling of vertices of a graph G(V, E) is a function V [k].
OPRE 6201 : 2. Simplex Method
 OPRE 6201 : 2. Simplex Method 1 The Graphical Method: An Example Consider the following linear program: Max 4x 1 +3x 2 Subject to: 2x 1 +3x 2 6 (1) 3x 1 +2x 2 3 (2) 2x 2 5 (3) 2x 1 +x 2 4 (4) x 1, x 2
OPRE 6201 : 2. Simplex Method 1 The Graphical Method: An Example Consider the following linear program: Max 4x 1 +3x 2 Subject to: 2x 1 +3x 2 6 (1) 3x 1 +2x 2 3 (2) 2x 2 5 (3) 2x 1 +x 2 4 (4) x 1, x 2
A Network Flow Approach in Cloud Computing
 1 A Network Flow Approach in Cloud Computing Soheil Feizi, Amy Zhang, Muriel Médard RLE at MIT Abstract In this paper, by using network flow principles, we propose algorithms to address various challenges
1 A Network Flow Approach in Cloud Computing Soheil Feizi, Amy Zhang, Muriel Médard RLE at MIT Abstract In this paper, by using network flow principles, we propose algorithms to address various challenges
Formal Specification and Verification
 Formal Specification and Verification Stefan Ratschan Katedra číslicového návrhu Fakulta informačních technologíı České vysoké učení technické v Praze 2. 5. 2011 Stefan Ratschan (FIT ČVUT) PI-PSC 4 2.
Formal Specification and Verification Stefan Ratschan Katedra číslicového návrhu Fakulta informačních technologíı České vysoké učení technické v Praze 2. 5. 2011 Stefan Ratschan (FIT ČVUT) PI-PSC 4 2.
Software Model Checking: Theory and Practice
 Software Model Checking: Theory and Practice Lecture: Specification Checking - LTL Model Checking Copyright 2004, Matt Dwyer, John Hatcliff, and Robby. The syllabus and all lectures for this course are
Software Model Checking: Theory and Practice Lecture: Specification Checking - LTL Model Checking Copyright 2004, Matt Dwyer, John Hatcliff, and Robby. The syllabus and all lectures for this course are
Scanner. tokens scanner parser IR. source code. errors
 Scanner source code tokens scanner parser IR errors maps characters into tokens the basic unit of syntax x = x + y; becomes = + ; character string value for a token is a lexeme
Scanner source code tokens scanner parser IR errors maps characters into tokens the basic unit of syntax x = x + y; becomes = + ; character string value for a token is a lexeme
1 Definition of a Turing machine
 Introduction to Algorithms Notes on Turing Machines CS 4820, Spring 2012 April 2-16, 2012 1 Definition of a Turing machine Turing machines are an abstract model of computation. They provide a precise,
Introduction to Algorithms Notes on Turing Machines CS 4820, Spring 2012 April 2-16, 2012 1 Definition of a Turing machine Turing machines are an abstract model of computation. They provide a precise,
A first step towards modeling semistructured data in hybrid multimodal logic
 A first step towards modeling semistructured data in hybrid multimodal logic Nicole Bidoit * Serenella Cerrito ** Virginie Thion * * LRI UMR CNRS 8623, Université Paris 11, Centre d Orsay. ** LaMI UMR
A first step towards modeling semistructured data in hybrid multimodal logic Nicole Bidoit * Serenella Cerrito ** Virginie Thion * * LRI UMR CNRS 8623, Université Paris 11, Centre d Orsay. ** LaMI UMR
Competitive Analysis of On line Randomized Call Control in Cellular Networks
 Competitive Analysis of On line Randomized Call Control in Cellular Networks Ioannis Caragiannis Christos Kaklamanis Evi Papaioannou Abstract In this paper we address an important communication issue arising
Competitive Analysis of On line Randomized Call Control in Cellular Networks Ioannis Caragiannis Christos Kaklamanis Evi Papaioannou Abstract In this paper we address an important communication issue arising
The Taxman Game. Robert K. Moniot September 5, 2003
 The Taxman Game Robert K. Moniot September 5, 2003 1 Introduction Want to know how to beat the taxman? Legally, that is? Read on, and we will explore this cute little mathematical game. The taxman game
The Taxman Game Robert K. Moniot September 5, 2003 1 Introduction Want to know how to beat the taxman? Legally, that is? Read on, and we will explore this cute little mathematical game. The taxman game