Unwrap Mosaics: A new representation for video editing
|
|
|
- Jasper Waters
- 9 years ago
- Views:
Transcription
1 Unwrap Mosaics: A new representation for video editing Alex Rav-Acha, Pushmeet Kohli, Carsten Rother, Andrew Fitzgibbon Microsoft Research SIGGRAPH
2 Abstract New representation for common editing tasks Representation has the power of full 3D surface reconstruction This representation is Unwrap Mosaics Editing can be performed and re-composited into the original sequence

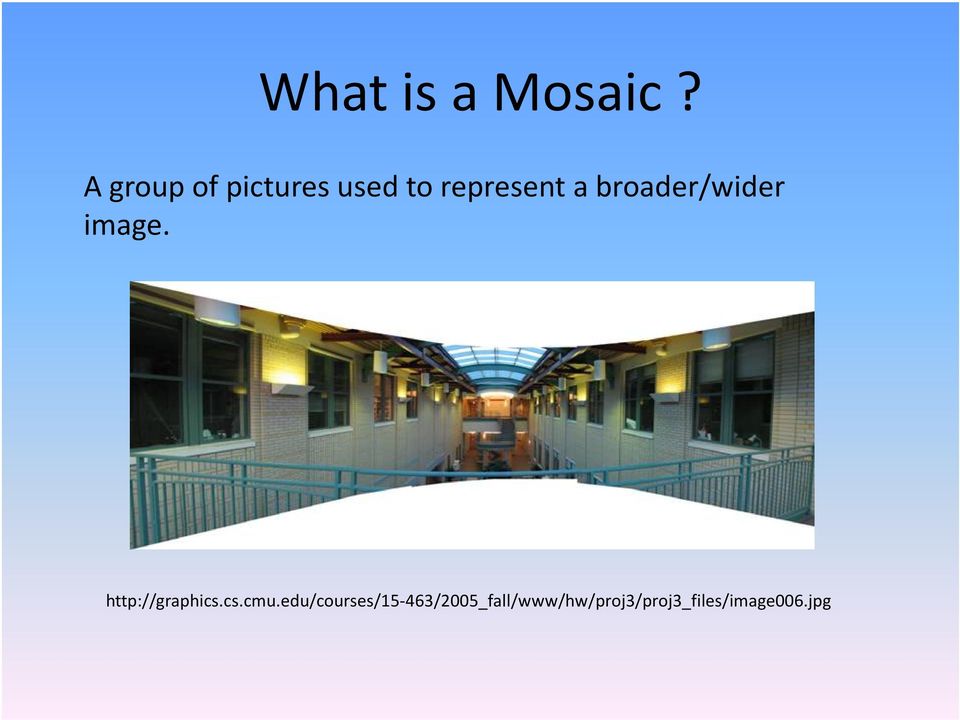
3 What is a Mosaic? A group of pictures used to represent a broader/wider image.
4 What is a Mosaic? 4 or 5 images used to form this mosaic

5 Mosaic Example

6 Mosaic Example

7 Goal To recover the object s texture map, rather than its 3D shape THE CONCEPT Video represented as several unwrap mosaics One per object One per background

8 Goal It is possible in principle to recover the 3D shape. For many editing tasks this is not necessary: edits can be performed on the mosaic itself and re-rendered without ever converting to a 3D representation.

9 Unwrap Mosaics A method to recover and edit dense models of deforming 3D surfaces from a video. Accompanying the recovered texture map will be a 2D-to-2D mapping describing the texture map s projection to the images, and a sequence of binary masks modeling occlusion. The combination of texture map, 2D 2D mapping, and occlusion masks is called the unwrap mosaic.

10 Unwrap Mosaics 3D models But not 3D! Uses Wide range of editing operations on the input video Model easier to recover from video and helps us work with self occlusion and deforming surfaces The main contribution of this paper is the algorithm to recover the unwrap mosaic from images. This algorithm is an energy minimization procedure.

11 High level steps of Algorithm Steps that correspond to minimization of the model energy via coordinate descent 1. Segmentation 2. Tracking 3. Embedding 4. Mosaic stitching 5. Track refinement 6. Iterate

12 Segmentation Steps Segmentation into independent moving objects Variant used here is video cut and paste allows segmentation maps to be obtained with relatively little effort Automatic segmentation maps computation is also possible.

13 Tracking Aim To recover the texture map of a deforming 3D object from a sequence of 2D images. ===================================== Although the model is changing its shape, the texture map may be assumed to be constant, as on skin and cloth. Consider a point on the object. As this point moves through the video, it generates a 2D trajectory or track. Conversely, standard computer vision algorithms for point detection and tracking can be used to compute such tracks from the input sequence.

14 Embedding - Computational cornerstone of the method -The tracks that were generated are viewed as high dimensional projection of 2D surfaces -The point (u; v) in parameter space generates a vector of image positions (x1; y1; x2; y2; :::; xt; yt) -We can recover the surface s (u; v) parameter space by computing an embeddingof the point tracks into 2D, directly yielding (u; v) coordinates for each track.
 coordinates for each")
15 Mosaic stitching -The embedding defines a map from the tracked points in each image to the (u; v) parameter space. -Interpolating this mapping allows each image to be warped into the common frame. -A variation of the standard mosaic stitching technique [Agarwalaet al. 2004] emerges naturally from the energy formulation. - In simple terms, creating a mosaic from different images.

16 Track Refinement -The mosaic is already available in this step (prev3 steps build the mosaic) -The generated mosaic is not accurate, but good enough to create a reference template to match the original frames -Reduces drift that may have been present after the tracking phase -Track info propagates to occluded areas giving complete description of the object motion

17 Iterate -Repeat the above steps again to fine tune precision -Hope to compute a better embedding and mosaic by iterating

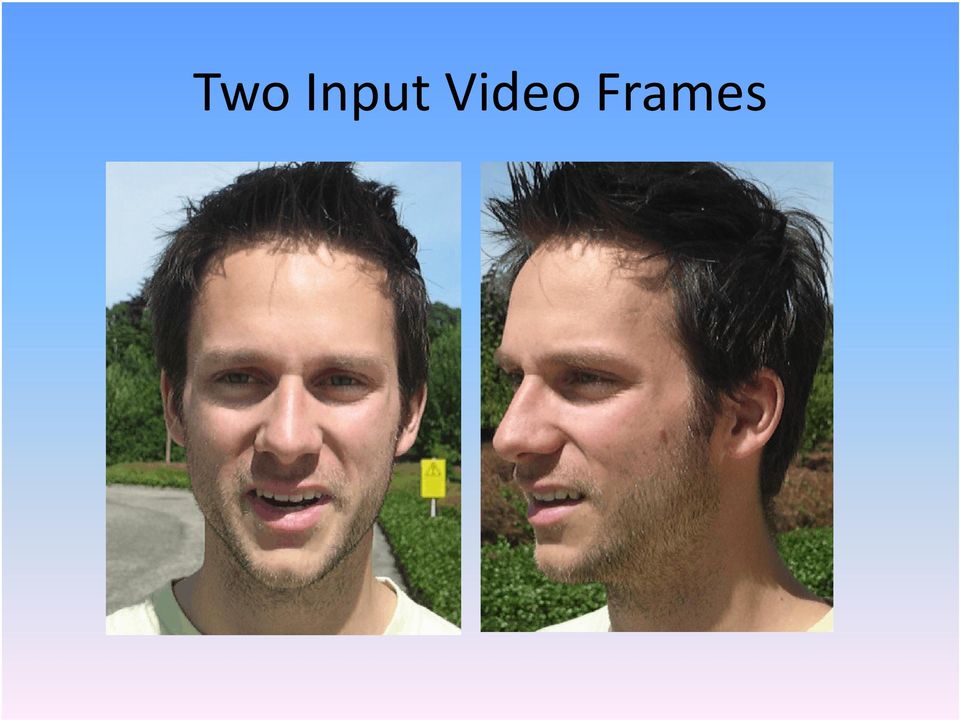
18 Two Input Video Frames
19 Unwrap Mosaic

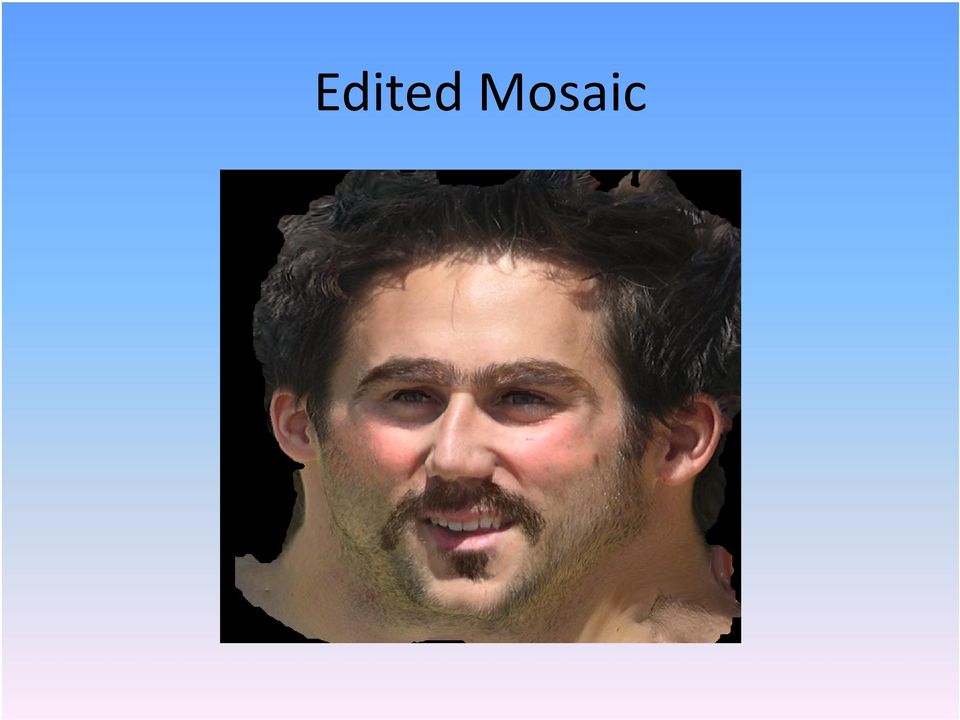
20 Edited Mosaic
21 Two Output Video Frames
22 Limitations 1. It requires quite well textured objects in order to work -Textured surfaces are required for point tracking. Low texture, such as on a face, requires good focus and lighting. One dimensional textures (stripes, rather than spots) suffer from the aperture problem. 2. Motion blur reduces efficacy of point tracking. 3. Object with protrusions do not yield useful mosaics 4. Strong shadows will disrupt tracking. Smooth lighting is assumed 5. Limited to disc-topology objects. Eg: A rotating cylinder will be reconstructed as a long tapestry rather than a mosaic with cylindrical topology.
23 Disc topology limitation Unwrap Mosaic
24 User interaction & Hinting -Algorithm can work completely automatically -Situations where lack of texture, repeated structures, or motion blur could cause the recovered mosaic not to cover all of the object. -New brushes (brush strokes) are introduced to specify points that were not covered by automatic segmentation.
25 User interaction & Hinting a. Automatic Computation
26 User interaction & Hinting b. User brush strokes
27 User interaction & Hinting c. New mosaic computed with only the brush strokes
28 Results For video editing, the primary criterion is obviously the range and quality of effects that are enabled by the model. Computation times for all of these sequences (show in the video) are of the order of a few hours. Check out this video!!
29 Thankyou Any Questions??!??!
A Short Introduction to Computer Graphics
 A Short Introduction to Computer Graphics Frédo Durand MIT Laboratory for Computer Science 1 Introduction Chapter I: Basics Although computer graphics is a vast field that encompasses almost any graphical
A Short Introduction to Computer Graphics Frédo Durand MIT Laboratory for Computer Science 1 Introduction Chapter I: Basics Although computer graphics is a vast field that encompasses almost any graphical
Silverlight for Windows Embedded Graphics and Rendering Pipeline 1
 Silverlight for Windows Embedded Graphics and Rendering Pipeline 1 Silverlight for Windows Embedded Graphics and Rendering Pipeline Windows Embedded Compact 7 Technical Article Writers: David Franklin,
Silverlight for Windows Embedded Graphics and Rendering Pipeline 1 Silverlight for Windows Embedded Graphics and Rendering Pipeline Windows Embedded Compact 7 Technical Article Writers: David Franklin,
The Scientific Data Mining Process
 Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Character Animation from 2D Pictures and 3D Motion Data ALEXANDER HORNUNG, ELLEN DEKKERS, and LEIF KOBBELT RWTH-Aachen University
 Character Animation from 2D Pictures and 3D Motion Data ALEXANDER HORNUNG, ELLEN DEKKERS, and LEIF KOBBELT RWTH-Aachen University Presented by: Harish CS-525 First presentation Abstract This article presents
Character Animation from 2D Pictures and 3D Motion Data ALEXANDER HORNUNG, ELLEN DEKKERS, and LEIF KOBBELT RWTH-Aachen University Presented by: Harish CS-525 First presentation Abstract This article presents
Feature Tracking and Optical Flow
 02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
Modelling 3D Avatar for Virtual Try on
 Modelling 3D Avatar for Virtual Try on NADIA MAGNENAT THALMANN DIRECTOR MIRALAB UNIVERSITY OF GENEVA DIRECTOR INSTITUTE FOR MEDIA INNOVATION, NTU, SINGAPORE WWW.MIRALAB.CH/ Creating Digital Humans Vertex
Modelling 3D Avatar for Virtual Try on NADIA MAGNENAT THALMANN DIRECTOR MIRALAB UNIVERSITY OF GENEVA DIRECTOR INSTITUTE FOR MEDIA INNOVATION, NTU, SINGAPORE WWW.MIRALAB.CH/ Creating Digital Humans Vertex
Segmentation of building models from dense 3D point-clouds
 Segmentation of building models from dense 3D point-clouds Joachim Bauer, Konrad Karner, Konrad Schindler, Andreas Klaus, Christopher Zach VRVis Research Center for Virtual Reality and Visualization, Institute
Segmentation of building models from dense 3D point-clouds Joachim Bauer, Konrad Karner, Konrad Schindler, Andreas Klaus, Christopher Zach VRVis Research Center for Virtual Reality and Visualization, Institute
Part-Based Recognition
 Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
OpenFOAM Optimization Tools
 OpenFOAM Optimization Tools Henrik Rusche and Aleks Jemcov [email protected] and [email protected] Wikki, Germany and United Kingdom OpenFOAM Optimization Tools p. 1 Agenda Objective Review optimisation
OpenFOAM Optimization Tools Henrik Rusche and Aleks Jemcov [email protected] and [email protected] Wikki, Germany and United Kingdom OpenFOAM Optimization Tools p. 1 Agenda Objective Review optimisation
ACE: After Effects CC
 Adobe Training Services Exam Guide ACE: After Effects CC Adobe Training Services provides this exam guide to help prepare partners, customers, and consultants who are actively seeking accreditation as
Adobe Training Services Exam Guide ACE: After Effects CC Adobe Training Services provides this exam guide to help prepare partners, customers, and consultants who are actively seeking accreditation as
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER
 ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
Real-time Visual Tracker by Stream Processing
 Real-time Visual Tracker by Stream Processing Simultaneous and Fast 3D Tracking of Multiple Faces in Video Sequences by Using a Particle Filter Oscar Mateo Lozano & Kuzahiro Otsuka presented by Piotr Rudol
Real-time Visual Tracker by Stream Processing Simultaneous and Fast 3D Tracking of Multiple Faces in Video Sequences by Using a Particle Filter Oscar Mateo Lozano & Kuzahiro Otsuka presented by Piotr Rudol
Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 269 Class Project Report
 Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 69 Class Project Report Junhua Mao and Lunbo Xu University of California, Los Angeles [email protected] and lunbo
Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 69 Class Project Report Junhua Mao and Lunbo Xu University of California, Los Angeles [email protected] and lunbo
ACE: After Effects CS6
 Adobe Training Services Exam Guide ACE: After Effects CS6 Adobe Training Services provides this exam guide to help prepare partners, customers, and consultants who are actively seeking accreditation as
Adobe Training Services Exam Guide ACE: After Effects CS6 Adobe Training Services provides this exam guide to help prepare partners, customers, and consultants who are actively seeking accreditation as
The 3D Animation Process at Framework Media
 7 Welsh Road Sutton, MA 01590 PHONE: 508.865.7060 FAX: 508.714.2287 WEB: http://www.frameworkmedia.com The 3D Animation Process at Framework Media Thank you for your interest in technical animation and
7 Welsh Road Sutton, MA 01590 PHONE: 508.865.7060 FAX: 508.714.2287 WEB: http://www.frameworkmedia.com The 3D Animation Process at Framework Media Thank you for your interest in technical animation and
Computer Graphics. Geometric Modeling. Page 1. Copyright Gotsman, Elber, Barequet, Karni, Sheffer Computer Science - Technion. An Example.
 An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
Interactive Offline Tracking for Color Objects
 Interactive Offline Tracking for Color Objects Yichen Wei Jian Sun Xiaoou Tang Heung-Yeung Shum Microsoft Research Asia, Beijing, China {yichenw,jiansun,xitang,hshum}@microsoft.com Abstract In this paper,
Interactive Offline Tracking for Color Objects Yichen Wei Jian Sun Xiaoou Tang Heung-Yeung Shum Microsoft Research Asia, Beijing, China {yichenw,jiansun,xitang,hshum}@microsoft.com Abstract In this paper,
ARC 3D Webservice How to transform your images into 3D models. Maarten Vergauwen [email protected]
 ARC 3D Webservice How to transform your images into 3D models Maarten Vergauwen [email protected] Overview What is it? How does it work? How do you use it? How to record images? Problems, tips and tricks Overview
ARC 3D Webservice How to transform your images into 3D models Maarten Vergauwen [email protected] Overview What is it? How does it work? How do you use it? How to record images? Problems, tips and tricks Overview
2.5 Physically-based Animation
 2.5 Physically-based Animation 320491: Advanced Graphics - Chapter 2 74 Physically-based animation Morphing allowed us to animate between two known states. Typically, only one state of an object is known.
2.5 Physically-based Animation 320491: Advanced Graphics - Chapter 2 74 Physically-based animation Morphing allowed us to animate between two known states. Typically, only one state of an object is known.
Object tracking & Motion detection in video sequences
 Introduction Object tracking & Motion detection in video sequences Recomended link: http://cmp.felk.cvut.cz/~hlavac/teachpresen/17compvision3d/41imagemotion.pdf 1 2 DYNAMIC SCENE ANALYSIS The input to
Introduction Object tracking & Motion detection in video sequences Recomended link: http://cmp.felk.cvut.cz/~hlavac/teachpresen/17compvision3d/41imagemotion.pdf 1 2 DYNAMIC SCENE ANALYSIS The input to
A Movement Tracking Management Model with Kalman Filtering Global Optimization Techniques and Mahalanobis Distance
 Loutraki, 21 26 October 2005 A Movement Tracking Management Model with ing Global Optimization Techniques and Raquel Ramos Pinho, João Manuel R. S. Tavares, Miguel Velhote Correia Laboratório de Óptica
Loutraki, 21 26 October 2005 A Movement Tracking Management Model with ing Global Optimization Techniques and Raquel Ramos Pinho, João Manuel R. S. Tavares, Miguel Velhote Correia Laboratório de Óptica
Cork Education and Training Board. Programme Module for. 3 Dimensional Computer Graphics. Leading to. Level 5 FETAC
 Cork Education and Training Board Programme Module for 3 Dimensional Computer Graphics Leading to Level 5 FETAC 3 Dimensional Computer Graphics 5N5029 3 Dimensional Computer Graphics 5N5029 1 Version 3
Cork Education and Training Board Programme Module for 3 Dimensional Computer Graphics Leading to Level 5 FETAC 3 Dimensional Computer Graphics 5N5029 3 Dimensional Computer Graphics 5N5029 1 Version 3
Mean-Shift Tracking with Random Sampling
 1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
OBJECT TRACKING USING LOG-POLAR TRANSFORMATION
 OBJECT TRACKING USING LOG-POLAR TRANSFORMATION A Thesis Submitted to the Gradual Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements
OBJECT TRACKING USING LOG-POLAR TRANSFORMATION A Thesis Submitted to the Gradual Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements
MOBILITY DATA MODELING AND REPRESENTATION
 PART I MOBILITY DATA MODELING AND REPRESENTATION 1 Trajectories and Their Representations Stefano Spaccapietra, Christine Parent, and Laura Spinsanti 1.1 Introduction For a long time, applications have
PART I MOBILITY DATA MODELING AND REPRESENTATION 1 Trajectories and Their Representations Stefano Spaccapietra, Christine Parent, and Laura Spinsanti 1.1 Introduction For a long time, applications have
Enhanced LIC Pencil Filter
 Enhanced LIC Pencil Filter Shigefumi Yamamoto, Xiaoyang Mao, Kenji Tanii, Atsumi Imamiya University of Yamanashi {[email protected], [email protected], [email protected]}
Enhanced LIC Pencil Filter Shigefumi Yamamoto, Xiaoyang Mao, Kenji Tanii, Atsumi Imamiya University of Yamanashi {[email protected], [email protected], [email protected]}
SUCCESSFUL PREDICTION OF HORSE RACING RESULTS USING A NEURAL NETWORK
 SUCCESSFUL PREDICTION OF HORSE RACING RESULTS USING A NEURAL NETWORK N M Allinson and D Merritt 1 Introduction This contribution has two main sections. The first discusses some aspects of multilayer perceptrons,
SUCCESSFUL PREDICTION OF HORSE RACING RESULTS USING A NEURAL NETWORK N M Allinson and D Merritt 1 Introduction This contribution has two main sections. The first discusses some aspects of multilayer perceptrons,
Face Model Fitting on Low Resolution Images
 Face Model Fitting on Low Resolution Images Xiaoming Liu Peter H. Tu Frederick W. Wheeler Visualization and Computer Vision Lab General Electric Global Research Center Niskayuna, NY, 1239, USA {liux,tu,wheeler}@research.ge.com
Face Model Fitting on Low Resolution Images Xiaoming Liu Peter H. Tu Frederick W. Wheeler Visualization and Computer Vision Lab General Electric Global Research Center Niskayuna, NY, 1239, USA {liux,tu,wheeler}@research.ge.com
Two hours UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE. M.Sc. in Advanced Computer Science. Friday 18 th January 2008.
 COMP60321 Two hours UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE M.Sc. in Advanced Computer Science Computer Animation Friday 18 th January 2008 Time: 09:45 11:45 Please answer any THREE Questions
COMP60321 Two hours UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE M.Sc. in Advanced Computer Science Computer Animation Friday 18 th January 2008 Time: 09:45 11:45 Please answer any THREE Questions
Facial Expression Analysis and Synthesis
 1. Research Team Facial Expression Analysis and Synthesis Project Leader: Other Faculty: Post Doc(s): Graduate Students: Undergraduate Students: Industrial Partner(s): Prof. Ulrich Neumann, IMSC and Computer
1. Research Team Facial Expression Analysis and Synthesis Project Leader: Other Faculty: Post Doc(s): Graduate Students: Undergraduate Students: Industrial Partner(s): Prof. Ulrich Neumann, IMSC and Computer
Motion Capture Sistemi a marker passivi
 Motion Capture Sistemi a marker passivi N. Alberto Borghese Laboratory of Human Motion Analysis and Virtual Reality (MAVR) Department of Computer Science University of Milano 1/41 Outline Introduction:
Motion Capture Sistemi a marker passivi N. Alberto Borghese Laboratory of Human Motion Analysis and Virtual Reality (MAVR) Department of Computer Science University of Milano 1/41 Outline Introduction:
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite
 Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Automatic Restoration Algorithms for 35mm film
 P. Schallauer, A. Pinz, W. Haas. Automatic Restoration Algorithms for 35mm film. To be published in Videre, Journal of Computer Vision Research, web: http://mitpress.mit.edu/videre.html, 1999. Automatic
P. Schallauer, A. Pinz, W. Haas. Automatic Restoration Algorithms for 35mm film. To be published in Videre, Journal of Computer Vision Research, web: http://mitpress.mit.edu/videre.html, 1999. Automatic
Taking Inverse Graphics Seriously
 CSC2535: 2013 Advanced Machine Learning Taking Inverse Graphics Seriously Geoffrey Hinton Department of Computer Science University of Toronto The representation used by the neural nets that work best
CSC2535: 2013 Advanced Machine Learning Taking Inverse Graphics Seriously Geoffrey Hinton Department of Computer Science University of Toronto The representation used by the neural nets that work best
CONVERGE Features, Capabilities and Applications
 CONVERGE Features, Capabilities and Applications CONVERGE CONVERGE The industry leading CFD code for complex geometries with moving boundaries. Start using CONVERGE and never make a CFD mesh again. CONVERGE
CONVERGE Features, Capabilities and Applications CONVERGE CONVERGE The industry leading CFD code for complex geometries with moving boundaries. Start using CONVERGE and never make a CFD mesh again. CONVERGE
Vision based Vehicle Tracking using a high angle camera
 Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu [email protected] [email protected] Abstract A vehicle tracking and grouping algorithm is presented in this work
Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu [email protected] [email protected] Abstract A vehicle tracking and grouping algorithm is presented in this work
Template-based Eye and Mouth Detection for 3D Video Conferencing
 Template-based Eye and Mouth Detection for 3D Video Conferencing Jürgen Rurainsky and Peter Eisert Fraunhofer Institute for Telecommunications - Heinrich-Hertz-Institute, Image Processing Department, Einsteinufer
Template-based Eye and Mouth Detection for 3D Video Conferencing Jürgen Rurainsky and Peter Eisert Fraunhofer Institute for Telecommunications - Heinrich-Hertz-Institute, Image Processing Department, Einsteinufer
SkillsUSA 2014 Contest Projects 3-D Visualization and Animation
 SkillsUSA Contest Projects 3-D Visualization and Animation Click the Print this Section button above to automatically print the specifications for this contest. Make sure your printer is turned on before
SkillsUSA Contest Projects 3-D Visualization and Animation Click the Print this Section button above to automatically print the specifications for this contest. Make sure your printer is turned on before
Traffic Monitoring Systems. Technology and sensors
 Traffic Monitoring Systems Technology and sensors Technology Inductive loops Cameras Lidar/Ladar and laser Radar GPS etc Inductive loops Inductive loops signals Inductive loop sensor The inductance signal
Traffic Monitoring Systems Technology and sensors Technology Inductive loops Cameras Lidar/Ladar and laser Radar GPS etc Inductive loops Inductive loops signals Inductive loop sensor The inductance signal
D animation. Advantages of 2-D2. Advantages of 3-D3. Related work. Key idea. Applications of Computer Graphics in Cel Animation.
 Page 1 Applications of Computer Graphics in Cel Animation 3-D D and 2-D 2 D animation Adam Finkelstein Princeton University COS 426 Spring 2003 Homer 3-D3 Homer 2-D2 Advantages of 3-D3 Complex lighting
Page 1 Applications of Computer Graphics in Cel Animation 3-D D and 2-D 2 D animation Adam Finkelstein Princeton University COS 426 Spring 2003 Homer 3-D3 Homer 2-D2 Advantages of 3-D3 Complex lighting
Build Panoramas on Android Phones
 Build Panoramas on Android Phones Tao Chu, Bowen Meng, Zixuan Wang Stanford University, Stanford CA Abstract The purpose of this work is to implement panorama stitching from a sequence of photos taken
Build Panoramas on Android Phones Tao Chu, Bowen Meng, Zixuan Wang Stanford University, Stanford CA Abstract The purpose of this work is to implement panorama stitching from a sequence of photos taken
Self-Positioning Handheld 3D Scanner
 Self-Positioning Handheld 3D Scanner Method Sheet: How to scan in Color and prep for Post Processing ZScan: Version 3.0 Last modified: 03/13/2009 POWERED BY Background theory The ZScanner 700CX was built
Self-Positioning Handheld 3D Scanner Method Sheet: How to scan in Color and prep for Post Processing ZScan: Version 3.0 Last modified: 03/13/2009 POWERED BY Background theory The ZScanner 700CX was built
3D/4D acquisition. 3D acquisition taxonomy 22.10.2014. Computer Vision. Computer Vision. 3D acquisition methods. passive. active.
 Das Bild kann zurzeit nicht angezeigt werden. 22.10.2014 3D/4D acquisition 3D acquisition taxonomy 3D acquisition methods passive active uni-directional multi-directional uni-directional multi-directional
Das Bild kann zurzeit nicht angezeigt werden. 22.10.2014 3D/4D acquisition 3D acquisition taxonomy 3D acquisition methods passive active uni-directional multi-directional uni-directional multi-directional
3D Face Modeling. Vuong Le. IFP group, Beckman Institute University of Illinois ECE417 Spring 2013
 3D Face Modeling Vuong Le IFP group, Beckman Institute University of Illinois ECE417 Spring 2013 Contents Motivation 3D facial geometry modeling 3D facial geometry acquisition 3D facial deformation modeling
3D Face Modeling Vuong Le IFP group, Beckman Institute University of Illinois ECE417 Spring 2013 Contents Motivation 3D facial geometry modeling 3D facial geometry acquisition 3D facial deformation modeling
Machine vision systems - 2
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Performance Driven Facial Animation Course Notes Example: Motion Retargeting
 Performance Driven Facial Animation Course Notes Example: Motion Retargeting J.P. Lewis Stanford University Frédéric Pighin Industrial Light + Magic Introduction When done correctly, a digitally recorded
Performance Driven Facial Animation Course Notes Example: Motion Retargeting J.P. Lewis Stanford University Frédéric Pighin Industrial Light + Magic Introduction When done correctly, a digitally recorded
Keywords: Image Generation and Manipulation, Video Processing, Video Factorization, Face Morphing
 TENSORIAL FACTORIZATION METHODS FOR MANIPULATION OF FACE VIDEOS S. Manikandan, Ranjeeth Kumar, C.V. Jawahar Center for Visual Information Technology International Institute of Information Technology, Hyderabad
TENSORIAL FACTORIZATION METHODS FOR MANIPULATION OF FACE VIDEOS S. Manikandan, Ranjeeth Kumar, C.V. Jawahar Center for Visual Information Technology International Institute of Information Technology, Hyderabad
Numerical Methods For Image Restoration
 Numerical Methods For Image Restoration CIRAM Alessandro Lanza University of Bologna, Italy Faculty of Engineering CIRAM Outline 1. Image Restoration as an inverse problem 2. Image degradation models:
Numerical Methods For Image Restoration CIRAM Alessandro Lanza University of Bologna, Italy Faculty of Engineering CIRAM Outline 1. Image Restoration as an inverse problem 2. Image degradation models:
Binary Image Scanning Algorithm for Cane Segmentation
 Binary Image Scanning Algorithm for Cane Segmentation Ricardo D. C. Marin Department of Computer Science University Of Canterbury Canterbury, Christchurch [email protected] Tom
Binary Image Scanning Algorithm for Cane Segmentation Ricardo D. C. Marin Department of Computer Science University Of Canterbury Canterbury, Christchurch [email protected] Tom
Character Animation Tutorial
 Character Animation Tutorial 1.Overview 2.Modelling 3.Texturing 5.Skeleton and IKs 4.Keys 5.Export the character and its animations 6.Load the character in Virtools 7.Material & texture tuning 8.Merge
Character Animation Tutorial 1.Overview 2.Modelling 3.Texturing 5.Skeleton and IKs 4.Keys 5.Export the character and its animations 6.Load the character in Virtools 7.Material & texture tuning 8.Merge
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner ([email protected]) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner ([email protected]) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Digital Video Systems ECE 634
 Digital Video Systems ECE 634 engineering.purdue.edu/~reibman/ece634/index.html Professor Amy Reibman MSEE 356 [email protected] Outline 1/27/15 MoKon eskmakon A computer assignment Summary (last class)
Digital Video Systems ECE 634 engineering.purdue.edu/~reibman/ece634/index.html Professor Amy Reibman MSEE 356 [email protected] Outline 1/27/15 MoKon eskmakon A computer assignment Summary (last class)
Two-Frame Motion Estimation Based on Polynomial Expansion
 Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden [email protected] http://www.isy.liu.se/cvl/ Abstract.
Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden [email protected] http://www.isy.liu.se/cvl/ Abstract.
Real-Time Tracking of Pedestrians and Vehicles
 Real-Time Tracking of Pedestrians and Vehicles N.T. Siebel and S.J. Maybank. Computational Vision Group Department of Computer Science The University of Reading Reading RG6 6AY, England Abstract We present
Real-Time Tracking of Pedestrians and Vehicles N.T. Siebel and S.J. Maybank. Computational Vision Group Department of Computer Science The University of Reading Reading RG6 6AY, England Abstract We present
Tutorial for Tracker and Supporting Software By David Chandler
 Tutorial for Tracker and Supporting Software By David Chandler I use a number of free, open source programs to do video analysis. 1. Avidemux, to exerpt the video clip, read the video properties, and save
Tutorial for Tracker and Supporting Software By David Chandler I use a number of free, open source programs to do video analysis. 1. Avidemux, to exerpt the video clip, read the video properties, and save
Digital 3D Animation
 Elizabethtown Area School District Digital 3D Animation Course Number: 753 Length of Course: 1 semester 18 weeks Grade Level: 11-12 Elective Total Clock Hours: 120 hours Length of Period: 80 minutes Date
Elizabethtown Area School District Digital 3D Animation Course Number: 753 Length of Course: 1 semester 18 weeks Grade Level: 11-12 Elective Total Clock Hours: 120 hours Length of Period: 80 minutes Date
Flash MX 2004 Animation Lesson
 Flash MX 2004 Animation Lesson By Tonia Malone Technology & Learning Services 14-102 Lesson Opening a document To open an existing document: 1. Select File > Open. 2. In the Open dialog box, navigate to
Flash MX 2004 Animation Lesson By Tonia Malone Technology & Learning Services 14-102 Lesson Opening a document To open an existing document: 1. Select File > Open. 2. In the Open dialog box, navigate to
Automatic parameter regulation for a tracking system with an auto-critical function
 Automatic parameter regulation for a tracking system with an auto-critical function Daniela Hall INRIA Rhône-Alpes, St. Ismier, France Email: [email protected] Abstract In this article we propose
Automatic parameter regulation for a tracking system with an auto-critical function Daniela Hall INRIA Rhône-Alpes, St. Ismier, France Email: [email protected] Abstract In this article we propose
Accurate and robust image superresolution by neural processing of local image representations
 Accurate and robust image superresolution by neural processing of local image representations Carlos Miravet 1,2 and Francisco B. Rodríguez 1 1 Grupo de Neurocomputación Biológica (GNB), Escuela Politécnica
Accurate and robust image superresolution by neural processing of local image representations Carlos Miravet 1,2 and Francisco B. Rodríguez 1 1 Grupo de Neurocomputación Biológica (GNB), Escuela Politécnica
Applications to Data Smoothing and Image Processing I
 Applications to Data Smoothing and Image Processing I MA 348 Kurt Bryan Signals and Images Let t denote time and consider a signal a(t) on some time interval, say t. We ll assume that the signal a(t) is
Applications to Data Smoothing and Image Processing I MA 348 Kurt Bryan Signals and Images Let t denote time and consider a signal a(t) on some time interval, say t. We ll assume that the signal a(t) is
Visualization and Feature Extraction, FLOW Spring School 2016 Prof. Dr. Tino Weinkauf. Flow Visualization. Image-Based Methods (integration-based)
") Visualization and Feature Extraction, FLOW Spring School 2016 Prof. Dr. Tino Weinkauf Flow Visualization Image-Based Methods (integration-based) Spot Noise (Jarke van Wijk, Siggraph 1991) Flow Visualization:
Visualization and Feature Extraction, FLOW Spring School 2016 Prof. Dr. Tino Weinkauf Flow Visualization Image-Based Methods (integration-based) Spot Noise (Jarke van Wijk, Siggraph 1991) Flow Visualization:
MyGraphicsLab ADOBE ILLUSTRATOR CC COURSE FOR GRAPHIC DESIGN & ILLUSTRATION Curriculum Mapping to ACA Objectives
 ADOBE ILLUSTRATOR CC COURSE FOR GRAPHIC DESIGN & ILLUSTRATION Curriculum Mapping to ACA Domain Domain 1.0 Setting Project Requirements 1.1 Identify the purpose, audience, and audience needs for preparing
ADOBE ILLUSTRATOR CC COURSE FOR GRAPHIC DESIGN & ILLUSTRATION Curriculum Mapping to ACA Domain Domain 1.0 Setting Project Requirements 1.1 Identify the purpose, audience, and audience needs for preparing
Spatio-Temporally Coherent 3D Animation Reconstruction from Multi-view RGB-D Images using Landmark Sampling
 , March 13-15, 2013, Hong Kong Spatio-Temporally Coherent 3D Animation Reconstruction from Multi-view RGB-D Images using Landmark Sampling Naveed Ahmed Abstract We present a system for spatio-temporally
, March 13-15, 2013, Hong Kong Spatio-Temporally Coherent 3D Animation Reconstruction from Multi-view RGB-D Images using Landmark Sampling Naveed Ahmed Abstract We present a system for spatio-temporally
Detecting and Tracking Moving Objects for Video Surveillance
 IEEE Proc. Computer Vision and Pattern Recognition Jun. 3-5, 1999. Fort Collins CO Detecting and Tracking Moving Objects for Video Surveillance Isaac Cohen Gérard Medioni University of Southern California
IEEE Proc. Computer Vision and Pattern Recognition Jun. 3-5, 1999. Fort Collins CO Detecting and Tracking Moving Objects for Video Surveillance Isaac Cohen Gérard Medioni University of Southern California
Immersive Medien und 3D-Video
 Fraunhofer-Institut für Nachrichtentechnik Heinrich-Hertz-Institut Ralf Schäfer [email protected] http://ip.hhi.de Immersive Medien und 3D-Video page 1 Outline Immersive Media Examples Interactive Media
Fraunhofer-Institut für Nachrichtentechnik Heinrich-Hertz-Institut Ralf Schäfer [email protected] http://ip.hhi.de Immersive Medien und 3D-Video page 1 Outline Immersive Media Examples Interactive Media
Edge tracking for motion segmentation and depth ordering
 Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
Steven C.H. Hoi. School of Computer Engineering Nanyang Technological University Singapore
 Steven C.H. Hoi School of Computer Engineering Nanyang Technological University Singapore Acknowledgments: Peilin Zhao, Jialei Wang, Hao Xia, Jing Lu, Rong Jin, Pengcheng Wu, Dayong Wang, etc. 2 Agenda
Steven C.H. Hoi School of Computer Engineering Nanyang Technological University Singapore Acknowledgments: Peilin Zhao, Jialei Wang, Hao Xia, Jing Lu, Rong Jin, Pengcheng Wu, Dayong Wang, etc. 2 Agenda
How To Make A Texture Map Work Better On A Computer Graphics Card (Or Mac)
") Improved Alpha-Tested Magnification for Vector Textures and Special Effects Chris Green Valve (a) 64x64 texture, alpha-blended (b) 64x64 texture, alpha tested (c) 64x64 texture using our technique Figure
Improved Alpha-Tested Magnification for Vector Textures and Special Effects Chris Green Valve (a) 64x64 texture, alpha-blended (b) 64x64 texture, alpha tested (c) 64x64 texture using our technique Figure
Kapitel 12. 3D Television Based on a Stereoscopic View Synthesis Approach
 Kapitel 12 3D Television Based on a Stereoscopic View Synthesis Approach DIBR (Depth-Image-Based Rendering) approach 3D content generation DIBR from non-video-rate depth stream Autostereoscopic displays
Kapitel 12 3D Television Based on a Stereoscopic View Synthesis Approach DIBR (Depth-Image-Based Rendering) approach 3D content generation DIBR from non-video-rate depth stream Autostereoscopic displays
Making Multiple Code Reading Easy. Webinar
 Making Multiple Code Reading Easy Webinar Today s Agenda Introduction How DataMan Makes Multiple Code Reading Easy Multiple Code Reading Applications Product Demonstration Videos Q&A 2 Introduction Introduction
Making Multiple Code Reading Easy Webinar Today s Agenda Introduction How DataMan Makes Multiple Code Reading Easy Multiple Code Reading Applications Product Demonstration Videos Q&A 2 Introduction Introduction
How To Segmentate An Image
 Edge Strength Functions as Shape Priors in Image Segmentation Erkut Erdem, Aykut Erdem, and Sibel Tari Middle East Technical University, Department of Computer Engineering, Ankara, TR-06531, TURKEY, {erkut,aykut}@ceng.metu.edu.tr,
Edge Strength Functions as Shape Priors in Image Segmentation Erkut Erdem, Aykut Erdem, and Sibel Tari Middle East Technical University, Department of Computer Engineering, Ankara, TR-06531, TURKEY, {erkut,aykut}@ceng.metu.edu.tr,
COMP 150-04 Visualization. Lecture 15 Animation
 COMP 150-04 Visualization Lecture 15 Animation History of animation The function of animation Illustrate steps of a complex process Illustrate cause and effect, context Show trends over time, tell a story
COMP 150-04 Visualization Lecture 15 Animation History of animation The function of animation Illustrate steps of a complex process Illustrate cause and effect, context Show trends over time, tell a story
Tracking Groups of Pedestrians in Video Sequences
 Tracking Groups of Pedestrians in Video Sequences Jorge S. Marques Pedro M. Jorge Arnaldo J. Abrantes J. M. Lemos IST / ISR ISEL / IST ISEL INESC-ID / IST Lisbon, Portugal Lisbon, Portugal Lisbon, Portugal
Tracking Groups of Pedestrians in Video Sequences Jorge S. Marques Pedro M. Jorge Arnaldo J. Abrantes J. M. Lemos IST / ISR ISEL / IST ISEL INESC-ID / IST Lisbon, Portugal Lisbon, Portugal Lisbon, Portugal
Tracking and Retexturing Cloth for Real-Time Virtual Clothing Applications
 Tracking and Retexturing Cloth for Real-Time Virtual Clothing Applications Anna Hilsmann and Peter Eisert Fraunhofer Heinrich Hertz Institute, Einsteinufer 37, 10587 Berlin, Germany {anna.hilsmann,peter.eisert}@hhi.fraunhofer.de
Tracking and Retexturing Cloth for Real-Time Virtual Clothing Applications Anna Hilsmann and Peter Eisert Fraunhofer Heinrich Hertz Institute, Einsteinufer 37, 10587 Berlin, Germany {anna.hilsmann,peter.eisert}@hhi.fraunhofer.de
Edge-based Template Matching and Tracking for Perspectively Distorted Planar Objects
 Edge-based Template Matching and Tracking for Perspectively Distorted Planar Objects Andreas Hofhauser, Carsten Steger, and Nassir Navab TU München, Boltzmannstr. 3, 85748 Garching bei München, Germany
Edge-based Template Matching and Tracking for Perspectively Distorted Planar Objects Andreas Hofhauser, Carsten Steger, and Nassir Navab TU München, Boltzmannstr. 3, 85748 Garching bei München, Germany
Subspace Analysis and Optimization for AAM Based Face Alignment
 Subspace Analysis and Optimization for AAM Based Face Alignment Ming Zhao Chun Chen College of Computer Science Zhejiang University Hangzhou, 310027, P.R.China [email protected] Stan Z. Li Microsoft
Subspace Analysis and Optimization for AAM Based Face Alignment Ming Zhao Chun Chen College of Computer Science Zhejiang University Hangzhou, 310027, P.R.China [email protected] Stan Z. Li Microsoft
B2.53-R3: COMPUTER GRAPHICS. NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions.
 B2.53-R3: COMPUTER GRAPHICS NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions. 2. PART ONE is to be answered in the TEAR-OFF ANSWER
B2.53-R3: COMPUTER GRAPHICS NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions. 2. PART ONE is to be answered in the TEAR-OFF ANSWER
Graphic Design for Beginners
 Graphic Design for Beginners Level: Duration: Time: Cost: Introduction 6 Days 9:30 AM - 4:30 PM Call for details Overview Managing the Adobe Photoshop Environment Working with Selections Enhancing an Image
Graphic Design for Beginners Level: Duration: Time: Cost: Introduction 6 Days 9:30 AM - 4:30 PM Call for details Overview Managing the Adobe Photoshop Environment Working with Selections Enhancing an Image
Learning Enhanced 3D Models for Vehicle Tracking
 Learning Enhanced 3D Models for Vehicle Tracking J.M. Ferryman, A. D. Worrall and S. J. Maybank Computational Vision Group, Department of Computer Science The University of Reading RG6 6AY, UK [email protected]
Learning Enhanced 3D Models for Vehicle Tracking J.M. Ferryman, A. D. Worrall and S. J. Maybank Computational Vision Group, Department of Computer Science The University of Reading RG6 6AY, UK [email protected]
2003-2012 MVTec Software GmbH.
 1 MVTec Software GmbH is a leading international manufacturer of software for machine vision used in all demanding areas of imaging: semi-conductor industry, web inspection, quality control and inspection
1 MVTec Software GmbH is a leading international manufacturer of software for machine vision used in all demanding areas of imaging: semi-conductor industry, web inspection, quality control and inspection
Extracting a Good Quality Frontal Face Images from Low Resolution Video Sequences
 Extracting a Good Quality Frontal Face Images from Low Resolution Video Sequences Pritam P. Patil 1, Prof. M.V. Phatak 2 1 ME.Comp, 2 Asst.Professor, MIT, Pune Abstract The face is one of the important
Extracting a Good Quality Frontal Face Images from Low Resolution Video Sequences Pritam P. Patil 1, Prof. M.V. Phatak 2 1 ME.Comp, 2 Asst.Professor, MIT, Pune Abstract The face is one of the important
Vision-based Control of 3D Facial Animation
 Eurographics/SIGGRAPH Symposium on Computer Animation (2003) D. Breen, M. Lin (Editors) Vision-based Control of 3D Facial Animation Jin-xiang Chai, 1 Jing Xiao 1 and Jessica Hodgins 1 1 The Robotics Institute,
Eurographics/SIGGRAPH Symposium on Computer Animation (2003) D. Breen, M. Lin (Editors) Vision-based Control of 3D Facial Animation Jin-xiang Chai, 1 Jing Xiao 1 and Jessica Hodgins 1 1 The Robotics Institute,
3D Animation Graphic Designer
 Goal of the program The training program aims to develop the trainee to get him to the level of professional and creative in designing models three-dimensional and move with all respect to this art and
Goal of the program The training program aims to develop the trainee to get him to the level of professional and creative in designing models three-dimensional and move with all respect to this art and
Anime Studio Debut vs. Pro
 vs. Animation Length 2 minutes (3000 frames) Unlimited Motion Tracking 3 Points Unlimited Audio Tracks 2 Tracks Unlimited Video Tracks 1 Track Unlimited Physics No Yes Poser scene import No Yes 3D layer
vs. Animation Length 2 minutes (3000 frames) Unlimited Motion Tracking 3 Points Unlimited Audio Tracks 2 Tracks Unlimited Video Tracks 1 Track Unlimited Physics No Yes Poser scene import No Yes 3D layer
How To Fix Out Of Focus And Blur Images With A Dynamic Template Matching Algorithm
 IJSTE - International Journal of Science Technology & Engineering Volume 1 Issue 10 April 2015 ISSN (online): 2349-784X Image Estimation Algorithm for Out of Focus and Blur Images to Retrieve the Barcode
IJSTE - International Journal of Science Technology & Engineering Volume 1 Issue 10 April 2015 ISSN (online): 2349-784X Image Estimation Algorithm for Out of Focus and Blur Images to Retrieve the Barcode
Highlight Removal by Illumination-Constrained Inpainting
 Highlight Removal by Illumination-Constrained Inpainting Ping Tan Stephen Lin Long Quan Heung-Yeung Shum Microsoft Research, Asia Hong Kong University of Science and Technology Abstract We present a single-image
Highlight Removal by Illumination-Constrained Inpainting Ping Tan Stephen Lin Long Quan Heung-Yeung Shum Microsoft Research, Asia Hong Kong University of Science and Technology Abstract We present a single-image
Visualizing of Berkeley Earth, NASA GISS, and Hadley CRU averaging techniques
 Visualizing of Berkeley Earth, NASA GISS, and Hadley CRU averaging techniques Robert Rohde Lead Scientist, Berkeley Earth Surface Temperature 1/15/2013 Abstract This document will provide a simple illustration
Visualizing of Berkeley Earth, NASA GISS, and Hadley CRU averaging techniques Robert Rohde Lead Scientist, Berkeley Earth Surface Temperature 1/15/2013 Abstract This document will provide a simple illustration
A Simple Feature Extraction Technique of a Pattern By Hopfield Network
 A Simple Feature Extraction Technique of a Pattern By Hopfield Network A.Nag!, S. Biswas *, D. Sarkar *, P.P. Sarkar *, B. Gupta **! Academy of Technology, Hoogly - 722 *USIC, University of Kalyani, Kalyani
A Simple Feature Extraction Technique of a Pattern By Hopfield Network A.Nag!, S. Biswas *, D. Sarkar *, P.P. Sarkar *, B. Gupta **! Academy of Technology, Hoogly - 722 *USIC, University of Kalyani, Kalyani