Distributed Real-Time Systems (TI-DRTS) Track 2. CAN-BUS Introduction. Version Ref. VECTOR application note & Motorola note
|
|
|
- Christiana Carter
- 9 years ago
- Views:
Transcription
1 Distributed Real-Time Systems (TI-DRTS) Track 2 CAN-BUS Introduction Version Ref. VECTOR application note & Motorola note

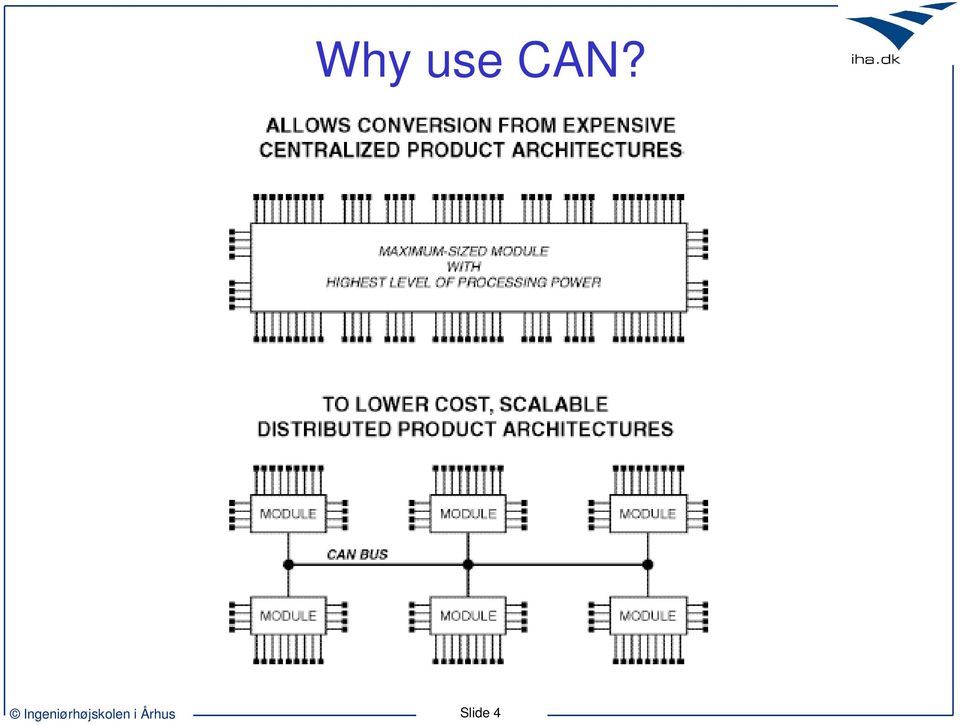
2 What is CAN? Controller Area Network (CAN) is a common, small area network solution that supports distributed product and distributed system architectures The CAN bus is used to interconnect a network of electronic nodes or modules Typically, a two wire, twisted pair cable is used for the network interconnection Slide 2

3 CAN - Highlights Is a high-integrity serial data communications bus for real-time applications Is event driven Operates at data rates of up to 1 Mbits/s Has excellent error detection capabilities Was originally developed by Bosch for use in cars Is now being used in many other industrial automation and control applications Is an international standard: ISO Slide 3

4 Why use CAN? Slide 4
5 CAN History CAN first introduced by Bosch in 1986 Bosch published CAN specification version 2.0 in 1991 Official ISO CAN standard in 1993: ISO In million CAN controller chips sold Estimated to 300 million CAN chips in 2003 Slide 5

6 Field Buses in the Automotive Industry Slide 6

7 Typical CAN Network Slide 7

8 CAN Standards Although CAN was originally developed in Europe by Robert Bosch for automotive applications, the protocol has gained wide acceptance and has become an open, international ISO standard As a result, the Bosch CAN 2.0B specification has become the de facto standard that new CAN chip designs follow CAN ISO Standardization: ISO PRF : CAN Conformance Test Plan ISO PRF : CAN Transfer Layer ISO PRF : CAN High Speed Physical Layer ISO DIS : CAN Fault Tolerant Physical Layer ISO DIS : TTCAN Time Triggered CAN Slide 8

9 CAN 2.0 Structure of a CAN Node ISO/OSI Reference Model CAN Specification, ISO 11898, deals only with the Physical & Data Link Layers for a CAN network Slide 9

10 Three-Layer Reference Model Application Process Layer 7 Layer 2 Layer 1 Application Layer Data Link Layer Physical Layer Management Slide 10

11 Key Reasons to Use CAN Low connect cost Low cost components Growing number of CAN chips Increasing knowledge base Increasing integration service base Wide variety of CAN-based products Wide variety of Off-the-Shelf tools available Potential lower wiring costs Lower weight Slide 11

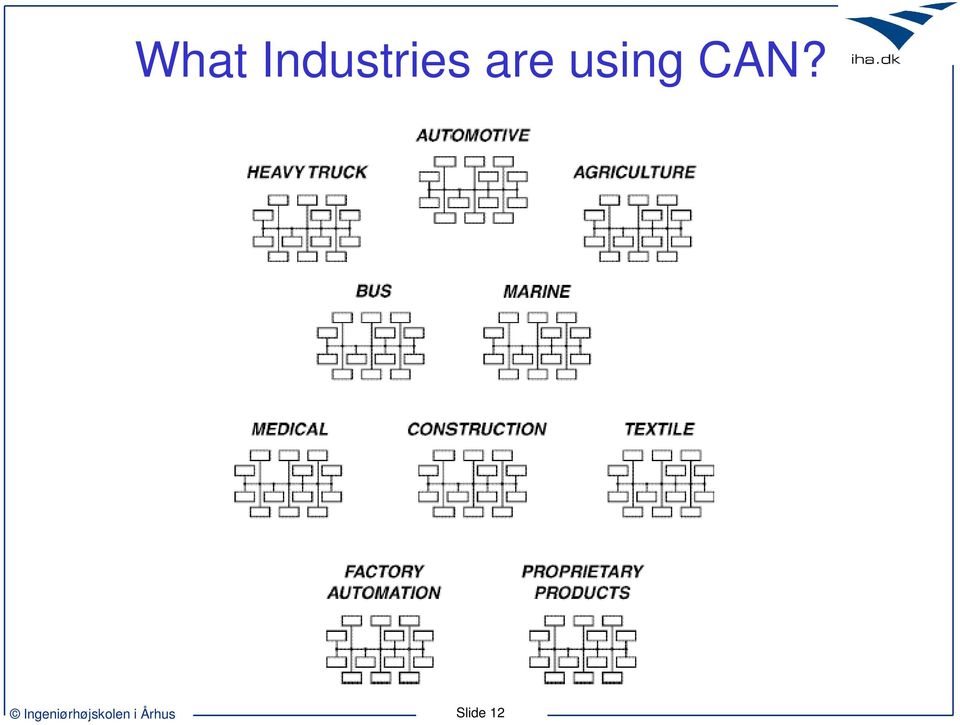
12 What Industries are using CAN? Slide 12
13 CAN Higher Layer Protocols (1) CAN is used as the basis for several major "7-layer" protocol developments such as: CAL: CAN Application Layer (CiA: Can In Automation) CAN Kingdom (Kvasar) CANopen (CiA: Can In Automation) DeviceNet (Rockwell Automation, ODVA) Volcano (Developed by Volvo) SAE J1939 (Society of Automotive Engineers) TTCAN: Time Triggered CAN (Bosch) Slide 13
 SAE J1939 (Society of Automotive Engineers) TTCAN: Time Triggered CAN")
14 CAN Higher Layer Protocols (2) Each of these large protocol architectures are essentially complete industry-specific network solutions packaged to include defined requirements for the: physical layer, address structure & message structure conversation structure data structure application/network interface Slide 14

15 How does CAN operate? CAN is a multiplexed serial communication channel Can transfer up to 8 data bytes within a single message For larger amounts of data, multiple messages are commonly used Most CAN based networks select a single bit rate While communication bit rates may be as high as 1 MBit/s, most implementations are 500Kbit/s or less CAN supports data transfers between multiple peers No master controller is needed to supervise the network conversation Slide 15

16 Bit Rate versus Bus Length Bit Rate (kbits/s) Maximum Bus length (m) A Rule of Thumb for bus length > 100 m: Bit Rate (Mbit/s) * Lmax (m) <=60 [Ref: Etschberger] Slide 16
 * Lmax (m) <=60 [Ref: Etschberger]")
17 Bit Rate versus Bus Length [Ref: Etschberger] Slide 17

18 CAN Identifiers Labels the content (type) of a message used by receivers to select a message Used for arbitration & determines the priority of the message Low id.number = high priority Slide 18

19 CAN 2.0A vs CAN 2.0B Slide 19
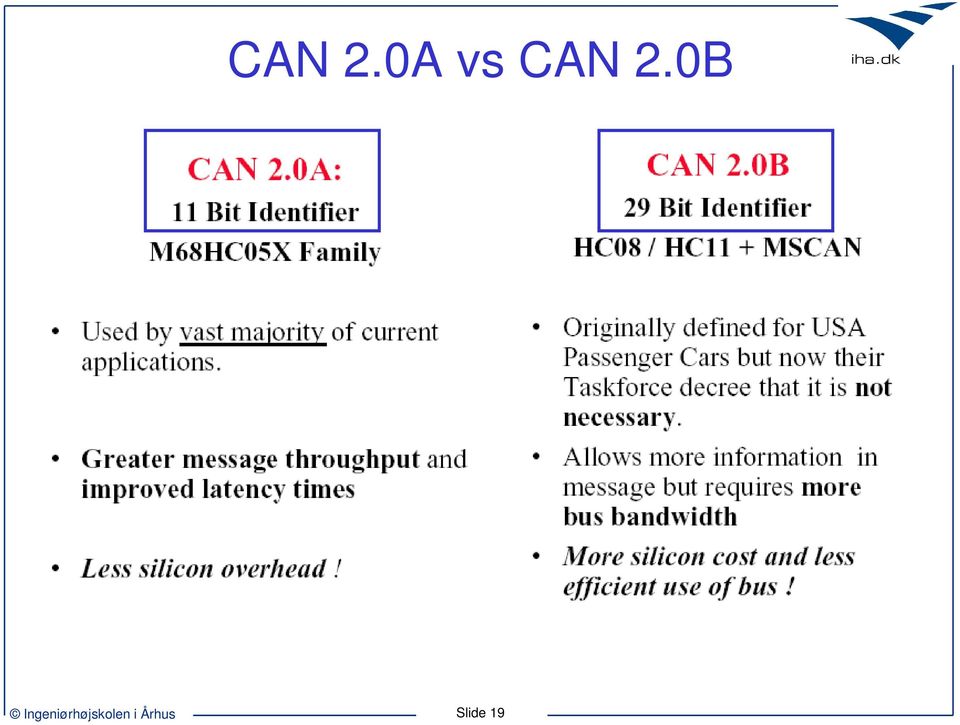
20 CAN 2.0A Message Frame CAN 2.0A (Standard Format) 11 bit message identifier (2048 different frames) Transmits and receives only standard format messages Slide 20

21 CAN Message Frame Slide 21
22 CAN 2.0B Message Frame CAN 2.0B (Extended Format) Capable of receiving CAN 2.0A messages 29 bit message identifier (512 million frames) 11 bits for a CAN 2.0A message + 18 bits for a CAN 2.0B message Slide 22
23 Two Communcation Types Transmitter Receiver 1 1. Transmitter initated Data Frame (ID=100, RTR Bit = 0) Receiver 2 2. Remote Transmission Request: Remote Frame (ID=105, RTR Bit = 1, Data Length=7) Data Frame (ID=105, RTR Bit = 0, Data Length= 7) Receiver 7 Slide 23
24 Arbitration (1) Carrier Sense, Multiple Access with Collision Avoidance (CSMA/CA) Method used to arbitrate and determine the priority of messages Uses enhanced capability of non-destructive bitwise arbitration to provide collision resolution Slide 24
25 Arbitration (2) A station may send if the bus is free (carrier sense) Any message begins with a field for unique bus arbitration containing the message ID The station with the lowest ID is dominant (D-Bit) So the lowest ID has highest priority Sending is not interfered since the propagation on the bus is much smaller than a duration of a bit Slide 25
26 Bitwise Arbitration Any potential bus conflicts are resolved by bitwise arbitration Dominant state (logic 0) has precedence over a recessive state (logic 1) Competition for the bus is won by node 2. Nodes 0 and 1 automatically become receivers of the message Nodes 0 and 1 will re-transmit their messages when the bus becomes available again Slide 26
27 Example of Bitwise Arbitration Slide 27
28 Qualities: Safe Collision and Tx-feedback The CAN-controller has 2 important features: A collision do not destroy any message on the bus All Tx s with recessive levels stops immediately and changes to Rx s. The Tx-node with highest priority wins the bus and sends data Every transmitted message is evaluated by each receiving node, and if the received message is damaged the Tx-node is alerted with a feedback at dominant level, sent from the Rx-node Slide 28
29 Error Detection CAN implements five error detection mechanisms Three at the message level Cyclic Redundancy Checks (CRC) Frame Checks Acknowledgment Error Checks Two at the bit level Bit Monitoring Bit Stuffing Slide 29
30 Cyclic Redundancy Check (CRC) (Message Level) The 15 bit CRC is computed by the transmitter based on the message content All receivers that accept the message, recalculates the CRC and compares against the received CRC If the two values do not match a CRC error is flagged Slide 30
31 Frame Check (Message Level) If a receiver detects an invalid bit in one of these positions a Form Error (or Format Error) will be flagged: CRC Delimiter ACK Delimiter End of Frame Bit Field Interframe Space (the 3 bit INTermission field and a possible Bus Idle time) Slide 31
32 ACK Error Check (Message Level) Each receiving node writes a dominant bit into the ACK slot If a transmitter determines that a message has not been ACKnowledged then an ACK Error is flagged. ACK errors may occur because of transmission errors because the ACK field has been corrupted or there is no operational receivers Slide 32
33 Bit Monitoring (Bit Level) Each bit level (dominant or recessive) on the bus is monitored by the transmitting node Bit monitoring is not performed during arbitration or on the ACK Slot Slide 33
34 Bit Stuffing (Bit Level) Bit stuffing is used to guarantee enough edges in the NRZ bit stream to maintain synchronization: After five identical and consecutive bit levels have been transmitted, the transmitter will automatically inject (stuff) a bit of the opposite polarity into the bit stream Receivers of the message will automatically delete (destuff) such bits If any node detects six consecutive bits of the same level, a stuff error is flagged Slide 34
35 Error Flag If an error is detected by at least one node The node that detects the error will immediately abort the transmission by sending an Error Flag An Error Flag consists of six dominant bits This violates the bit stuffing rule and all other nodes respond by also transmitting Error Flags Slide 35
36 What is needed to implement CAN? Slide 36
37 Requirements for a CAN Controller Slide 37
38 FullCAN vs BasicCAN Controller FullCAN Controller: Typically 16 message buffers, sometimes more Global and Dedicated Message Filtering Masks Dedicated H/W for Reducing CPU Workload More Silicon => more cost e.g. Powertrain BasicCAN Controller: 1 or 2 Tx and Rx buffers Minimal Filtering More Software Intervention Low cost e.g. Car Body Slide 38
39 CANopen CANopen: a standardized application for distributed industrial automation systems Based on CAN standard and CAL (Can Application Layer) In Europe the definitive standard for the implementation of industrial CAN-based system solutions Standardized by CiA (CAN-in-Automation) Devices profiles e.g. digital/analog I/O modules, drives, encoders, MMI-units, controllers Two types of communication mechanisms: unconfirmed transmission of data frames to transfer process data confirmed transmission of data (for configuration purpose) Slide 39
40 DeviceNet DeviceNet developed by Rockwell Automation in 1995 Main CAN automation technology in USA and Asia ODVA: Open DeviceNet Vendor Assocation (>300 members) DeviceNet is a connection-based communication model (ConnectionId = CAN identifier) Two message types: explicit and I/O messages Max 64 nodes in a DeviceNet network Slide 40
41 Three Development Scenarios based on a layer-2 implementation Application based on a standard application layer Application CAL/ CAN Kingdom based on a standardized application profile Application CANopen / DeviceNet CAN CAN CAN Slide 41
42 CAN Summary CAN is designed for asynchronous communication (event communication) with little information contents (8 bytes) Max 1MBit/s Useful for soft real-time systems Many microcontrollers comes with an integrated CAN controller A low-cost solution New invention: TTCAN a Time-Triggered CAN protocol Slide 42
43 References [Etschberger]: Controller Area Network basics, protocols, chips and applications, by Konrad Etschberger, IXXAT Press, Contains specification documents References Links ODVA: Open DeviceNet Vendors Association CiA: CAN in Automation Slide 43
Welcome to the Introduction to Controller Area Network web seminar My name is William Stuart, and I am a Applications Engineer for the Automotive
 Welcome to the Introduction to Controller Area Network web seminar My name is William Stuart, and I am a Applications Engineer for the Automotive Products Group within Microchip. This web seminar today
Welcome to the Introduction to Controller Area Network web seminar My name is William Stuart, and I am a Applications Engineer for the Automotive Products Group within Microchip. This web seminar today
CAN Specification 2.0, Part B page 1 PART B. CAN in Automation, Am Weichselgarten 26, D-91058 Erlangen
 CAN Specification 2.0, Part B page 1 PART B CAN Specification 2.0, Part B page 2 1 INTRODUCTION...3 2 BASIC CONCEPTS...5 3 MESSAGE TRANSFER...11 3.1 Frame Formats...11 3.2 Frame Types...11 3.2.1 DATA FRAME...11
CAN Specification 2.0, Part B page 1 PART B CAN Specification 2.0, Part B page 2 1 INTRODUCTION...3 2 BASIC CONCEPTS...5 3 MESSAGE TRANSFER...11 3.1 Frame Formats...11 3.2 Frame Types...11 3.2.1 DATA FRAME...11
Tutorial. www.ccontrols.com
 Tutorial 1 Tutorial CONTROLLER AREA NETWORK CAN was designed by Bosch and is currently described by ISO 11898 1. In terms of the Open Systems Interconnection model (OSI), CAN partially defines the services
Tutorial 1 Tutorial CONTROLLER AREA NETWORK CAN was designed by Bosch and is currently described by ISO 11898 1. In terms of the Open Systems Interconnection model (OSI), CAN partially defines the services
Elettronica dei Sistemi Digitali Costantino Giaconia SERIAL I/O COMMON PROTOCOLS
 SERIAL I/O COMMON PROTOCOLS RS-232 Fundamentals What is RS-232 RS-232 is a popular communications interface for connecting modems and data acquisition devices (i.e. GPS receivers, electronic balances,
SERIAL I/O COMMON PROTOCOLS RS-232 Fundamentals What is RS-232 RS-232 is a popular communications interface for connecting modems and data acquisition devices (i.e. GPS receivers, electronic balances,
Local Interconnect Network Training. Local Interconnect Network Training. Overview
 Overview Local Interconnect Network Training History and introduction Technical features The ISO/OSI reference model and LIN Frames Message Frames Communication concept of LIN Command Frames and Extended
Overview Local Interconnect Network Training History and introduction Technical features The ISO/OSI reference model and LIN Frames Message Frames Communication concept of LIN Command Frames and Extended
Comparison of FlexRay and CAN-bus for Real-Time Communication
 Comparison of FlexRay and CAN-bus for Real-Time Communication Andreas Forsberg Mälardalen University Högskoleplan 1 721 23 Västerås +46 768011236 [email protected] Johan Hedberg Mälardalen University
Comparison of FlexRay and CAN-bus for Real-Time Communication Andreas Forsberg Mälardalen University Högskoleplan 1 721 23 Västerås +46 768011236 [email protected] Johan Hedberg Mälardalen University
Understanding SAE J1939. by Simma Software, Inc.
 Understanding SAE J1939 by Simma Software, Inc. Contact E-mail: jrsimma at simmasoftware dot com Phone: 888-256-3828 For J1939 source code, see J1939 Software Starting Notes Ask questions anytime. This
Understanding SAE J1939 by Simma Software, Inc. Contact E-mail: jrsimma at simmasoftware dot com Phone: 888-256-3828 For J1939 source code, see J1939 Software Starting Notes Ask questions anytime. This
In-Vehicular Communication Networking Protocol
 In-Vehicular Communication Networking Protocol ABSTRACT Renu Sharma Indiana University, Purdue University Indianapolis, IN [email protected] Today s modern vehicles contain a complex symbiosis of intelligent
In-Vehicular Communication Networking Protocol ABSTRACT Renu Sharma Indiana University, Purdue University Indianapolis, IN [email protected] Today s modern vehicles contain a complex symbiosis of intelligent
Vorlesung Kommunikationsnetze Fieldbus Systems
 Vorlesung Kommunikationsnetze Fieldbus Systems Prof. Dr. H. P. Großmann mit B. Wiegel sowie A. Schmeiser und M. Rabel Sommersemester 2009 Institut für Organisation und Management von Informationssystemen
Vorlesung Kommunikationsnetze Fieldbus Systems Prof. Dr. H. P. Großmann mit B. Wiegel sowie A. Schmeiser und M. Rabel Sommersemester 2009 Institut für Organisation und Management von Informationssystemen
Protocols for Wired and Wireless Networks in Vehicle Systems
 Protocols for Wired and Wireless Networks in Vehicle Systems Syed Masud Mahmud, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 Copyright 2002 by Syed Masud Mahmud Email:
Protocols for Wired and Wireless Networks in Vehicle Systems Syed Masud Mahmud, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 Copyright 2002 by Syed Masud Mahmud Email:
A Security Evaluation and Internal Penetration Testing Of the CAN-bus
 A Security Evaluation and Internal Penetration Testing Of the CAN-bus Master of Science Thesis in the program Networks and Distributed Systems SAREH TALEBI Chalmers University of Technology Department
A Security Evaluation and Internal Penetration Testing Of the CAN-bus Master of Science Thesis in the program Networks and Distributed Systems SAREH TALEBI Chalmers University of Technology Department
2.1 CAN Bit Structure The Nominal Bit Rate of the network is uniform throughout the network and is given by:
 Order this document by /D CAN Bit Timing Requirements by Stuart Robb East Kilbride, Scotland. 1 Introduction 2 CAN Bit Timing Overview The Controller Area Network (CAN) is a serial, asynchronous, multi-master
Order this document by /D CAN Bit Timing Requirements by Stuart Robb East Kilbride, Scotland. 1 Introduction 2 CAN Bit Timing Overview The Controller Area Network (CAN) is a serial, asynchronous, multi-master
DeviceNet Communication Manual
 DeviceNet Communication Manual Soft-Starter Series: SSW-07/SSW-08 Language: English Document: 10000046963 / 00 03/2008 Summary ABOUT THIS MANUAL... 5 ABBREVIATIONS AND DEFINITIONS... 5 NUMERICAL REPRESENTATION...
DeviceNet Communication Manual Soft-Starter Series: SSW-07/SSW-08 Language: English Document: 10000046963 / 00 03/2008 Summary ABOUT THIS MANUAL... 5 ABBREVIATIONS AND DEFINITIONS... 5 NUMERICAL REPRESENTATION...
Bluetooth in Automotive Applications Lars-Berno Fredriksson, KVASER AB
 Bluetooth in Automotive Applications Lars-Berno Fredriksson, KVASER AB ABSTRACT There is a potential for 50-400 million per year Bluetooth nodes within the car market if Bluetooth can be integrated into
Bluetooth in Automotive Applications Lars-Berno Fredriksson, KVASER AB ABSTRACT There is a potential for 50-400 million per year Bluetooth nodes within the car market if Bluetooth can be integrated into
FlexRay A Communications Network for Automotive Control Systems
 FlexRay A Communications Network for Automotive Control Systems WFCS 2006 Rainer Makowitz Automotive Systems Engineering, EMEA Freescale and the Freescale logo are trademarks of Freescale Semiconductor,
FlexRay A Communications Network for Automotive Control Systems WFCS 2006 Rainer Makowitz Automotive Systems Engineering, EMEA Freescale and the Freescale logo are trademarks of Freescale Semiconductor,
The SAE J1939 Communications Network
 The SAE J939 Communications Network An overview of the J939 family of standards and how they are used An SAE White Paper Since its publication more than a decade ago, SAE J939 has become widely accepted
The SAE J939 Communications Network An overview of the J939 family of standards and how they are used An SAE White Paper Since its publication more than a decade ago, SAE J939 has become widely accepted
Computer Networks. Data Link Layer
 Computer Networks The Data Link Layer 1 Data Link Layer Application Transport Network DLL PHY 2 What does it do? What functions it performs? Typically: Handling transmission errors, a.k.a., error control.
Computer Networks The Data Link Layer 1 Data Link Layer Application Transport Network DLL PHY 2 What does it do? What functions it performs? Typically: Handling transmission errors, a.k.a., error control.
LAN Switching. 15-441 Computer Networking. Switched Network Advantages. Hubs (more) Hubs. Bridges/Switches, 802.11, PPP. Interconnecting LANs
 Hubs. Bridges/Switches, 802.11, PPP. Interconnecting LANs") LAN Switching 15-441 Computer Networking Bridges/Switches, 802.11, PPP Extend reach of a single shared medium Connect two or more segments by copying data frames between them Switches only copy data when
LAN Switching 15-441 Computer Networking Bridges/Switches, 802.11, PPP Extend reach of a single shared medium Connect two or more segments by copying data frames between them Switches only copy data when
LIN (Local Interconnect Network):
:") LIN (Local Interconnect Network): History: LIN (Local Interconnect Network) was developed as cost-effective alternate to CAN protocol. In 1998 a group of companies including Volvo, Motorola, Audi, BMW,
LIN (Local Interconnect Network): History: LIN (Local Interconnect Network) was developed as cost-effective alternate to CAN protocol. In 1998 a group of companies including Volvo, Motorola, Audi, BMW,
Section 34. Controller Area Network (CAN)
") Section 34. Controller Area Network (CAN) HIGHLIGHT This section of the manual contains the following topics: 34.1 Introduction...34-2 34.2 CAN Message Formats... 34-4 34.3 CAN Registers...34-9 34.4 Enabling
Section 34. Controller Area Network (CAN) HIGHLIGHT This section of the manual contains the following topics: 34.1 Introduction...34-2 34.2 CAN Message Formats... 34-4 34.3 CAN Registers...34-9 34.4 Enabling
DigiPoints Volume 1. Student Workbook. Module 4 Bandwidth Management
 Bandwidth Management Page 4.1 DigiPoints Volume 1 Module 4 Bandwidth Management Summary This module will cover Time Division Multiplexing (TDM). TDM technology allows many users to access a particular
Bandwidth Management Page 4.1 DigiPoints Volume 1 Module 4 Bandwidth Management Summary This module will cover Time Division Multiplexing (TDM). TDM technology allows many users to access a particular
Introduction to. LIN (Local Interconnect Network)
") Introduction to LIN (Local Interconnect Network) Stéphane REY Revision 1.0 - ay 13 th, 2003 Table of content 1 INTRODUCTION...3 1.1 PURPOSE OF THE DOCUENT...3 1.2 ACRONYOUS...3 1.3 RELATED DOCUENTS...3
Introduction to LIN (Local Interconnect Network) Stéphane REY Revision 1.0 - ay 13 th, 2003 Table of content 1 INTRODUCTION...3 1.1 PURPOSE OF THE DOCUENT...3 1.2 ACRONYOUS...3 1.3 RELATED DOCUENTS...3
Ring Local Area Network. Ring LANs
 Ring Local Area Network Ring interface (1-bit buffer) Ring interface To station From station Ring LANs The ring is a series of bit repeaters, each connected by a unidirectional transmission link All arriving
Ring Local Area Network Ring interface (1-bit buffer) Ring interface To station From station Ring LANs The ring is a series of bit repeaters, each connected by a unidirectional transmission link All arriving
Computer Network. Interconnected collection of autonomous computers that are able to exchange information
 Introduction Computer Network. Interconnected collection of autonomous computers that are able to exchange information No master/slave relationship between the computers in the network Data Communications.
Introduction Computer Network. Interconnected collection of autonomous computers that are able to exchange information No master/slave relationship between the computers in the network Data Communications.
Getting Started with CANopen Version 1.1 2008-05-29 Application Note AN-AON-1-1102
 Version 1.1 2008-05-29 Restrictions Abstract Public Document This application note explains items which need to be considered when creating a CANopen device or system. The Manager, Systems Engineer, and
Version 1.1 2008-05-29 Restrictions Abstract Public Document This application note explains items which need to be considered when creating a CANopen device or system. The Manager, Systems Engineer, and
Positioning Controller
 Edition May 2008 Positioning Controller Application Note "CANopen Basic Information" Edition May 2008 EPOS 24/1, EPOS 24/5, EPOS 70/10, MCD EPOS 60W, EPOS2 50/5 Firmware version 2000h or higher Introduction
Edition May 2008 Positioning Controller Application Note "CANopen Basic Information" Edition May 2008 EPOS 24/1, EPOS 24/5, EPOS 70/10, MCD EPOS 60W, EPOS2 50/5 Firmware version 2000h or higher Introduction
The I2C Bus. NXP Semiconductors: UM10204 I2C-bus specification and user manual. 14.10.2010 HAW - Arduino 1
 The I2C Bus Introduction The I2C-bus is a de facto world standard that is now implemented in over 1000 different ICs manufactured by more than 50 companies. Additionally, the versatile I2C-bus is used
The I2C Bus Introduction The I2C-bus is a de facto world standard that is now implemented in over 1000 different ICs manufactured by more than 50 companies. Additionally, the versatile I2C-bus is used
EECS 122: Introduction to Computer Networks Multiaccess Protocols. ISO OSI Reference Model for Layers
 EECS 122: Introduction to Computer Networks Multiaccess Protocols Computer Science Division Department of Electrical Engineering and Computer Sciences University of California, Berkeley Berkeley, CA 94720-1776
EECS 122: Introduction to Computer Networks Multiaccess Protocols Computer Science Division Department of Electrical Engineering and Computer Sciences University of California, Berkeley Berkeley, CA 94720-1776
Bus Data Acquisition and Remote Monitoring System Using Gsm & Can
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 8, Issue 3 (Nov. - Dec. 2013), PP 88-92 Bus Data Acquisition and Remote Monitoring System
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 8, Issue 3 (Nov. - Dec. 2013), PP 88-92 Bus Data Acquisition and Remote Monitoring System
www.imprezer.tk Introduction to www.union88.tk RACE FUELS Hans-Christian von der Wense Munich, Germany
 Introduction to Hans-Christian von der Wense Munich, Germany Overview Progress in Automotive Electronics and it s Impacts on Networking LIN Consortium LIN Concept Physical Layer Data Link Layer LIN Network
Introduction to Hans-Christian von der Wense Munich, Germany Overview Progress in Automotive Electronics and it s Impacts on Networking LIN Consortium LIN Concept Physical Layer Data Link Layer LIN Network
In-Vehicle Networking
 In-Vehicle Networking SAE Network classification Class A networks Low Speed (
In-Vehicle Networking SAE Network classification Class A networks Low Speed (
ECE 358: Computer Networks. Homework #3. Chapter 5 and 6 Review Questions 1
 ECE 358: Computer Networks Homework #3 Chapter 5 and 6 Review Questions 1 Chapter 5: The Link Layer P26. Let's consider the operation of a learning switch in the context of a network in which 6 nodes labeled
ECE 358: Computer Networks Homework #3 Chapter 5 and 6 Review Questions 1 Chapter 5: The Link Layer P26. Let's consider the operation of a learning switch in the context of a network in which 6 nodes labeled
Real-Time Systems Hermann Härtig Real-Time Communication (following Kopetz, Liu, Schönberg, Löser)
") Real-Time Systems Hermann Härtig Real-Time Communication (following Kopetz, Liu, Schönberg, Löser) 05/02/15 Contents Overview IO Busses: PCI Networks as schedulable resources: Priority / Time-Driven /
Real-Time Systems Hermann Härtig Real-Time Communication (following Kopetz, Liu, Schönberg, Löser) 05/02/15 Contents Overview IO Busses: PCI Networks as schedulable resources: Priority / Time-Driven /
Implementing MOD bus and CAN bus Protocol Conversion Interface
 Implementing MOD bus and CAN bus Protocol Conversion Interface Umesh Goyal, Gaurav Khurana M.E., Electronics & Electrical Communications Department, PEC University of Technology, India M.E., Electronics
Implementing MOD bus and CAN bus Protocol Conversion Interface Umesh Goyal, Gaurav Khurana M.E., Electronics & Electrical Communications Department, PEC University of Technology, India M.E., Electronics
CS263: Wireless Communications and Sensor Networks
 CS263: Wireless Communications and Sensor Networks Matt Welsh Lecture 4: Medium Access Control October 5, 2004 2004 Matt Welsh Harvard University 1 Today's Lecture Medium Access Control Schemes: FDMA TDMA
CS263: Wireless Communications and Sensor Networks Matt Welsh Lecture 4: Medium Access Control October 5, 2004 2004 Matt Welsh Harvard University 1 Today's Lecture Medium Access Control Schemes: FDMA TDMA
Ethernet. Ethernet Frame Structure. Ethernet Frame Structure (more) Ethernet: uses CSMA/CD
 Ethernet: uses CSMA/CD") Ethernet dominant LAN technology: cheap -- $20 for 100Mbs! first widely used LAN technology Simpler, cheaper than token rings and ATM Kept up with speed race: 10, 100, 1000 Mbps Metcalfe s Etheret sketch
Ethernet dominant LAN technology: cheap -- $20 for 100Mbs! first widely used LAN technology Simpler, cheaper than token rings and ATM Kept up with speed race: 10, 100, 1000 Mbps Metcalfe s Etheret sketch
Process Control and Automation using Modbus Protocol
 Process Control and Automation using Modbus Protocol Modbus is the fundamental network protocol used in most industrial applications today. It is universal, open and an easy to use protocol. Modbus has
Process Control and Automation using Modbus Protocol Modbus is the fundamental network protocol used in most industrial applications today. It is universal, open and an easy to use protocol. Modbus has
RPDO 1 TPDO 1 TPDO 5 TPDO 6 TPDO 7 TPDO 8
 EN ZC - 6DI8DO CANopen I/O Module 6 Digital Input 8 Digital Output Or 8 Counters (3 bit) 8 Digital input 8 Digital output User Manual Contents: Features PDOs PDO Type Emergency Message Functional Diagrams
EN ZC - 6DI8DO CANopen I/O Module 6 Digital Input 8 Digital Output Or 8 Counters (3 bit) 8 Digital input 8 Digital output User Manual Contents: Features PDOs PDO Type Emergency Message Functional Diagrams
802.11 standard. Acknowledgement: Slides borrowed from Richard Y. Yang @ Yale
 802.11 standard Acknowledgement: Slides borrowed from Richard Y. Yang @ Yale IEEE 802.11 Requirements Design for small coverage (e.g. office, home) Low/no mobility High data-rate applications Ability to
802.11 standard Acknowledgement: Slides borrowed from Richard Y. Yang @ Yale IEEE 802.11 Requirements Design for small coverage (e.g. office, home) Low/no mobility High data-rate applications Ability to
Serial Communications
 Serial Communications 1 Serial Communication Introduction Serial communication buses Asynchronous and synchronous communication UART block diagram UART clock requirements Programming the UARTs Operation
Serial Communications 1 Serial Communication Introduction Serial communication buses Asynchronous and synchronous communication UART block diagram UART clock requirements Programming the UARTs Operation
Vehicle data acquisition using CAN By Henning Olsson, OptimumG [email protected]
 Vehicle data acquisition using By Henning Olsson, OptimumG [email protected] Introduction: Data acquisition is one of the best tools to increase the understanding of vehicle behavior. One can
Vehicle data acquisition using By Henning Olsson, OptimumG [email protected] Introduction: Data acquisition is one of the best tools to increase the understanding of vehicle behavior. One can
CCNA R&S: Introduction to Networks. Chapter 5: Ethernet
 CCNA R&S: Introduction to Networks Chapter 5: Ethernet 5.0.1.1 Introduction The OSI physical layer provides the means to transport the bits that make up a data link layer frame across the network media.
CCNA R&S: Introduction to Networks Chapter 5: Ethernet 5.0.1.1 Introduction The OSI physical layer provides the means to transport the bits that make up a data link layer frame across the network media.
Multiplexed Networks for Embedded Systems. CAN, LIN, FlexRay, Safe-by- Wire...
 Brochure More information from http://www.researchandmarkets.com/reports/2173638/ Multiplexed Networks for Embedded Systems. CAN, LIN, FlexRay, Safe-by- Wire... Description: Multiplexed networks are essential
Brochure More information from http://www.researchandmarkets.com/reports/2173638/ Multiplexed Networks for Embedded Systems. CAN, LIN, FlexRay, Safe-by- Wire... Description: Multiplexed networks are essential
Introduction to Higher-Level Protocols Version 1.0 Application Note AN-AND-1-160
 Version 1.0 Application Note AN-AND-1-160 Restrictions Abstract Public Document This application notes gives an overview of the major features of the most widely used high-level protocols in the automotive
Version 1.0 Application Note AN-AND-1-160 Restrictions Abstract Public Document This application notes gives an overview of the major features of the most widely used high-level protocols in the automotive
Automotive Communication Network Trends
 Automotive Communication Network Trends Renesas Electronics America Inc. Renesas Technology & Solution Portfolio 2 Microcontroller and Microprocessor Line-up 2010 2012 32-bit 1200 DMIPS, Superscalar Automotive
Automotive Communication Network Trends Renesas Electronics America Inc. Renesas Technology & Solution Portfolio 2 Microcontroller and Microprocessor Line-up 2010 2012 32-bit 1200 DMIPS, Superscalar Automotive
Written examination in Computer Networks
 Written examination in Computer Networks February 14th 2014 Last name: First name: Student number: Provide on all sheets (including the cover sheet) your last name, rst name and student number. Use the
Written examination in Computer Networks February 14th 2014 Last name: First name: Student number: Provide on all sheets (including the cover sheet) your last name, rst name and student number. Use the
TD-03011E. Identifier Usage in CANopen Networks
 Identifier Usage in CANopen Networks Author : U. Koppe Published : January 2003 This document describes the usage of identifiers in CANopen networks. The paper is intended for CANopen newcomers and system
Identifier Usage in CANopen Networks Author : U. Koppe Published : January 2003 This document describes the usage of identifiers in CANopen networks. The paper is intended for CANopen newcomers and system
Based on Computer Networking, 4 th Edition by Kurose and Ross
 Computer Networks Ethernet Hubs and Switches Based on Computer Networking, 4 th Edition by Kurose and Ross Ethernet dominant wired LAN technology: cheap $20 for NIC first widely used LAN technology Simpler,
Computer Networks Ethernet Hubs and Switches Based on Computer Networking, 4 th Edition by Kurose and Ross Ethernet dominant wired LAN technology: cheap $20 for NIC first widely used LAN technology Simpler,
Serial Communications
 April 2014 7 Serial Communications Objectives - To be familiar with the USART (RS-232) protocol. - To be able to transfer data from PIC-PC, PC-PIC and PIC-PIC. - To test serial communications with virtual
April 2014 7 Serial Communications Objectives - To be familiar with the USART (RS-232) protocol. - To be able to transfer data from PIC-PC, PC-PIC and PIC-PIC. - To test serial communications with virtual
Data Link Layer Overview
 Data Link Layer Overview Date link layer deals with two basic issues: Part I How data frames can be reliably transmitted, and Part II How a shared communication medium can be accessed In many networks,
Data Link Layer Overview Date link layer deals with two basic issues: Part I How data frames can be reliably transmitted, and Part II How a shared communication medium can be accessed In many networks,
Development of Scalable CAN Protocol
 AUTOMOTIVE Development of Scalable CAN Protocol Ryo KURACHI*, Masanobu NISHIMURA*, Hiroaki TAKADA, Shigeharu TESHIMA, Yukihiro MIYASHITA, Satoshi HORIHATA, Hideki YAMAMOTO and Akihiro NATSUME In today
AUTOMOTIVE Development of Scalable CAN Protocol Ryo KURACHI*, Masanobu NISHIMURA*, Hiroaki TAKADA, Shigeharu TESHIMA, Yukihiro MIYASHITA, Satoshi HORIHATA, Hideki YAMAMOTO and Akihiro NATSUME In today
DATA COMMUNICATION AND NETWORKS
 DATA COMMUNICATION AND NETWORKS 1. Define the term Computer Networks. A Computer network is a number if computers interconnected by one or more transmission paths. The transmission path often is the telephone
DATA COMMUNICATION AND NETWORKS 1. Define the term Computer Networks. A Computer network is a number if computers interconnected by one or more transmission paths. The transmission path often is the telephone
Local Area Networks transmission system private speedy and secure kilometres shared transmission medium hardware & software
 Local Area What s a LAN? A transmission system, usually private owned, very speedy and secure, covering a geographical area in the range of kilometres, comprising a shared transmission medium and a set
Local Area What s a LAN? A transmission system, usually private owned, very speedy and secure, covering a geographical area in the range of kilometres, comprising a shared transmission medium and a set
Real-time Operating Systems Lecture 27.1
 Real-time Operating Systems Lecture 27.1 14.7. Universal Serial Bus () General References http://www.usb.org. http://www.beyondlogic.org/usbnutshell/ References http://www.ftdichip.com/documents/programguides/d2xxpg34.pdf
Real-time Operating Systems Lecture 27.1 14.7. Universal Serial Bus () General References http://www.usb.org. http://www.beyondlogic.org/usbnutshell/ References http://www.ftdichip.com/documents/programguides/d2xxpg34.pdf
Software Development for Multiple OEMs Using Tool Configured Middleware for CAN Communication
 01PC-422 Software Development for Multiple OEMs Using Tool Configured Middleware for CAN Communication Pascal Jost IAS, University of Stuttgart, Germany Stephan Hoffmann Vector CANtech Inc., USA Copyright
01PC-422 Software Development for Multiple OEMs Using Tool Configured Middleware for CAN Communication Pascal Jost IAS, University of Stuttgart, Germany Stephan Hoffmann Vector CANtech Inc., USA Copyright
Data Link Layer(1) Principal service: Transferring data from the network layer of the source machine to the one of the destination machine
 Principal service: Transferring data from the network layer of the source machine to the one of the destination machine") Data Link Layer(1) Principal service: Transferring data from the network layer of the source machine to the one of the destination machine Virtual communication versus actual communication: Specific functions
Data Link Layer(1) Principal service: Transferring data from the network layer of the source machine to the one of the destination machine Virtual communication versus actual communication: Specific functions
CSMA/CA. Information Networks p. 1
 Information Networks p. 1 CSMA/CA IEEE 802.11 standard for WLAN defines a distributed coordination function (DCF) for sharing access to the medium based on the CSMA/CA protocol Collision detection is not
Information Networks p. 1 CSMA/CA IEEE 802.11 standard for WLAN defines a distributed coordination function (DCF) for sharing access to the medium based on the CSMA/CA protocol Collision detection is not
The Future of CAN / CANopen and the Industrial Ethernet Challenge by Wilfried Voss, President esd electronics, Inc USA
 The Future of CAN / CANopen and the Industrial Ethernet Challenge by Wilfried Voss, President esd electronics, Inc USA Industrial Ethernet technologies are a formidable challenge to CANopen as the low-cost
The Future of CAN / CANopen and the Industrial Ethernet Challenge by Wilfried Voss, President esd electronics, Inc USA Industrial Ethernet technologies are a formidable challenge to CANopen as the low-cost
SPI I2C LIN Ethernet. u Today: Wired embedded networks. u Next lecture: CAN bus u Then: 802.15.4 wireless embedded network
 u Today: Wired embedded networks Ø Characteristics and requirements Ø Some embedded LANs SPI I2C LIN Ethernet u Next lecture: CAN bus u Then: 802.15.4 wireless embedded network Network from a High End
u Today: Wired embedded networks Ø Characteristics and requirements Ø Some embedded LANs SPI I2C LIN Ethernet u Next lecture: CAN bus u Then: 802.15.4 wireless embedded network Network from a High End
Microcomputer Protocol Implementation at Local Interconnect Network Georgi Krastev
 Microcomputer Protocol Implementation at Local Interconnect Network Georgi Krastev Abstract: The paper discusses the issues of microcomputer protocol implementation at local interconnect network for automobile
Microcomputer Protocol Implementation at Local Interconnect Network Georgi Krastev Abstract: The paper discusses the issues of microcomputer protocol implementation at local interconnect network for automobile
ARM Ltd 110 Fulbourn Road, Cambridge, CB1 9NJ, UK. *[email protected]
 Serial Wire Debug and the CoreSight TM Debug and Trace Architecture Eddie Ashfield, Ian Field, Peter Harrod *, Sean Houlihane, William Orme and Sheldon Woodhouse ARM Ltd 110 Fulbourn Road, Cambridge, CB1
Serial Wire Debug and the CoreSight TM Debug and Trace Architecture Eddie Ashfield, Ian Field, Peter Harrod *, Sean Houlihane, William Orme and Sheldon Woodhouse ARM Ltd 110 Fulbourn Road, Cambridge, CB1
Chapter 4. Medium Access Control. IN2P3 Octobre 2002 Jean-Pierre Thomesse
 Chapter 4 Medium Access Control 1 Introduction Objectives To manage the access to the medium or channel To take into account the time constraints To schedule the traffics Different solutions History Different
Chapter 4 Medium Access Control 1 Introduction Objectives To manage the access to the medium or channel To take into account the time constraints To schedule the traffics Different solutions History Different
82557 10 100 Mbps PCI LAN Controller A Guide to 82596 Compatibility
 APPLICATION NOTE 82557 10 100 Mbps PCI LAN Controller A Guide to 82596 Compatibility Technical Marketing Network Products Division November 1995 Order Number 644126-001 Information in this document is
APPLICATION NOTE 82557 10 100 Mbps PCI LAN Controller A Guide to 82596 Compatibility Technical Marketing Network Products Division November 1995 Order Number 644126-001 Information in this document is
LANs. Local Area Networks. via the Media Access Control (MAC) SubLayer. Networks: Local Area Networks
 SubLayer. Networks: Local Area Networks") LANs Local Area Networks via the Media Access Control (MAC) SubLayer 1 Local Area Networks Aloha Slotted Aloha CSMA (non-persistent, 1-persistent, p-persistent) CSMA/CD Ethernet Token Ring 2 Network Layer
LANs Local Area Networks via the Media Access Control (MAC) SubLayer 1 Local Area Networks Aloha Slotted Aloha CSMA (non-persistent, 1-persistent, p-persistent) CSMA/CD Ethernet Token Ring 2 Network Layer
Express Forwarding : A Distributed QoS MAC Protocol for Wireless Mesh
 Express Forwarding : A Distributed QoS MAC Protocol for Wireless Mesh, Ph.D. [email protected] Mesh 2008, Cap Esterel, France 1 Abstract Abundant hidden node collisions and correlated channel access
Express Forwarding : A Distributed QoS MAC Protocol for Wireless Mesh, Ph.D. [email protected] Mesh 2008, Cap Esterel, France 1 Abstract Abundant hidden node collisions and correlated channel access
EnOcean Radio Protocol 2. September 26, 2013 SPECIFICATION V1.0. Subject to modifications EnOcean Radio Protocol 2 V1.0 Page 1/19
 SPECIFICATION V1.0 EnOcean Radio Protocol 2 September 26, 2013 EnOcean GmbH Kolpingring 18a 82041 Oberhaching Germany Phone +49.89.67 34 689-0 Fax +49.89.67 34 689-50 [email protected] www.enocean.com Subject
SPECIFICATION V1.0 EnOcean Radio Protocol 2 September 26, 2013 EnOcean GmbH Kolpingring 18a 82041 Oberhaching Germany Phone +49.89.67 34 689-0 Fax +49.89.67 34 689-50 [email protected] www.enocean.com Subject
How to Hack Your Mini Cooper: Reverse Engineering CAN Messages on Passenger Automobiles
 How to Hack Your Mini Cooper: Reverse Engineering CAN Messages on Passenger Automobiles Jason Staggs Who is this guy? Jason Staggs Graduate Research Assistant Institute for Information Security (isec)
How to Hack Your Mini Cooper: Reverse Engineering CAN Messages on Passenger Automobiles Jason Staggs Who is this guy? Jason Staggs Graduate Research Assistant Institute for Information Security (isec)
Industrial Networks & Databases
 Industrial Networks & Databases - Device Bus - - Field Bus - - Data Bus - Recall An Industrial Communication Network (control network) - any group of devices (computers, controllers, meters etc.) working
Industrial Networks & Databases - Device Bus - - Field Bus - - Data Bus - Recall An Industrial Communication Network (control network) - any group of devices (computers, controllers, meters etc.) working
Multiple clock domains
 DESIGNING A ROBUST USB SERIAL INTERFACE ENGINE(SIE) What is the SIE? A typical function USB hardware interface is shown in Fig. 1. USB Transceiver USB Serial Interface Engine Status Control Data Buffers/
DESIGNING A ROBUST USB SERIAL INTERFACE ENGINE(SIE) What is the SIE? A typical function USB hardware interface is shown in Fig. 1. USB Transceiver USB Serial Interface Engine Status Control Data Buffers/
SocketCAN CAN Driver Interface under Linux
 SocketCAN CAN Driver Interface under Linux Daniel Krüger [email protected] SYS TEC electronic GmbH www.systec-electronic.com Version 3/19/2012 What is CAN? CAN = Controller Area Network
SocketCAN CAN Driver Interface under Linux Daniel Krüger [email protected] SYS TEC electronic GmbH www.systec-electronic.com Version 3/19/2012 What is CAN? CAN = Controller Area Network
UMBC. ISA is the oldest of all these and today s computers still have a ISA bus interface. in form of an ISA slot (connection) on the main board.
 on the main board.") Bus Interfaces Different types of buses: ISA (Industry Standard Architecture) EISA (Extended ISA) VESA (Video Electronics Standards Association, VL Bus) PCI (Periheral Component Interconnect) USB (Universal
Bus Interfaces Different types of buses: ISA (Industry Standard Architecture) EISA (Extended ISA) VESA (Video Electronics Standards Association, VL Bus) PCI (Periheral Component Interconnect) USB (Universal
In networking ECUs in heavy-duty vehicles, it is the J1939 protocol that. plays a key role. J1939 networks are based on the CAN bus (high-speed
 Networking Heavy-Duty Vehicles Based on SAE J1939 From Parameter Group to plug-and-play Application In networking ECUs in heavy-duty vehicles, it is the J1939 protocol that plays a key role. J1939 networks
Networking Heavy-Duty Vehicles Based on SAE J1939 From Parameter Group to plug-and-play Application In networking ECUs in heavy-duty vehicles, it is the J1939 protocol that plays a key role. J1939 networks
Road Vehicles - Diagnostic Systems
 SSF 14230 Road Vehicles - Diagnostic Systems Keyword Protocol 2000 - Part 1 - Physical Layer Swedish Implementation Standard Document: SSF 14230-1 Status: Issue 3 Date: October 22, 1997 This document is
SSF 14230 Road Vehicles - Diagnostic Systems Keyword Protocol 2000 - Part 1 - Physical Layer Swedish Implementation Standard Document: SSF 14230-1 Status: Issue 3 Date: October 22, 1997 This document is
TCP in Wireless Networks
 Outline Lecture 10 TCP Performance and QoS in Wireless s TCP Performance in wireless networks TCP performance in asymmetric networks WAP Kurose-Ross: Chapter 3, 6.8 On-line: TCP over Wireless Systems Problems
Outline Lecture 10 TCP Performance and QoS in Wireless s TCP Performance in wireless networks TCP performance in asymmetric networks WAP Kurose-Ross: Chapter 3, 6.8 On-line: TCP over Wireless Systems Problems
Comparison of CAN, TTP and Flexray Communication Protocols
 Comparison of CAN, TTP and Flexray Communication Protocols B. Abdul Rahim 1, S.Krishnaveni 2 1 Professor, Annamacharya Institute of Technology & sciences, Rajampet, Andhra Pradesh, India 2 M.TechScholar,
Comparison of CAN, TTP and Flexray Communication Protocols B. Abdul Rahim 1, S.Krishnaveni 2 1 Professor, Annamacharya Institute of Technology & sciences, Rajampet, Andhra Pradesh, India 2 M.TechScholar,
BCS THE CHARTERED INSTITUTE FOR IT. BCS HIGHER EDUCATION QUALIFICATIONS BCS Level 5 Diploma in IT COMPUTER NETWORKS
 BCS THE CHARTERED INSTITUTE FOR IT BCS HIGHER EDUCATION QUALIFICATIONS BCS Level 5 Diploma in IT COMPUTER NETWORKS Friday 2 nd October 2015 Morning Answer any FOUR questions out of SIX. All questions carry
BCS THE CHARTERED INSTITUTE FOR IT BCS HIGHER EDUCATION QUALIFICATIONS BCS Level 5 Diploma in IT COMPUTER NETWORKS Friday 2 nd October 2015 Morning Answer any FOUR questions out of SIX. All questions carry
Eliminate Risk of Contention and Data Corruption in RS-485 Communications
 I. Background and Objective Eliminate Risk of Contention and Data Corruption in RS-485 Communications Earle Foster, Jeff Hunter Sealevel Systems The RS-485 communications standard was introduced in 1983
I. Background and Objective Eliminate Risk of Contention and Data Corruption in RS-485 Communications Earle Foster, Jeff Hunter Sealevel Systems The RS-485 communications standard was introduced in 1983
Computer buses and interfaces
 FYS3240 PC-based instrumentation and microcontrollers Computer buses and interfaces Spring 2011 Lecture #5 Bekkeng 15.1.2011 The most common data acquisition buses available today Internal computer buses
FYS3240 PC-based instrumentation and microcontrollers Computer buses and interfaces Spring 2011 Lecture #5 Bekkeng 15.1.2011 The most common data acquisition buses available today Internal computer buses
9chapter. Indutrial networks. Presentation: Needs and available components. Technologies. Schneider Electric policy
 9chapter Indutrial networks Technologies Presentation: Needs and available components Schneider Electric policy 198 Summary 1 2 9.1 Introduction 200 9.2 History 200 9.3 Market requirements and solutions
9chapter Indutrial networks Technologies Presentation: Needs and available components Schneider Electric policy 198 Summary 1 2 9.1 Introduction 200 9.2 History 200 9.3 Market requirements and solutions
Introduction to LIN. Webinar
 Introduction to LIN Webinar V2.2.07 2014-03-03 Agenda > Information 4 Overview 6 LIN Workflow 9 LIN Physical Layer 12 LIN Communication 14 Synchronization of the LIN nodes 16 LIN Message & Scheduling 19
Introduction to LIN Webinar V2.2.07 2014-03-03 Agenda > Information 4 Overview 6 LIN Workflow 9 LIN Physical Layer 12 LIN Communication 14 Synchronization of the LIN nodes 16 LIN Message & Scheduling 19
RTT 60.5 msec receiver window size: 32 KB
 Real-World ARQ Performance: TCP Ex.: Purdue UCSD Purdue (NSL): web server UCSD: web client traceroute to planetlab3.ucsd.edu (132.239.17.226), 30 hops max, 40 byte packets 1 switch-lwsn2133-z1r11 (128.10.27.250)
Real-World ARQ Performance: TCP Ex.: Purdue UCSD Purdue (NSL): web server UCSD: web client traceroute to planetlab3.ucsd.edu (132.239.17.226), 30 hops max, 40 byte packets 1 switch-lwsn2133-z1r11 (128.10.27.250)
Random Access Protocols
 Lecture Today slotted vs unslotted ALOHA Carrier sensing multiple access Ethernet DataLink Layer 1 Random Access Protocols When node has packet to send transmit at full channel data rate R. no a priori
Lecture Today slotted vs unslotted ALOHA Carrier sensing multiple access Ethernet DataLink Layer 1 Random Access Protocols When node has packet to send transmit at full channel data rate R. no a priori
Data Exchange On The CAN Bus I
 Service. Self-Study Programme 238 Data Exchange On The CAN Bus I Basics The CAN bus system in a car interlinks the control units to form a network. This produces new functions in the car and in diagnostics
Service. Self-Study Programme 238 Data Exchange On The CAN Bus I Basics The CAN bus system in a car interlinks the control units to form a network. This produces new functions in the car and in diagnostics
Generic term for using the Ethernet standard in automation / industrial applications
 Seite 24 Industrial Ethernet Generic term for using the Ethernet standard in automation / industrial applications Specific Quality of Service requirements Real-time Cycle time (e.g. < 1 ms for motion control
Seite 24 Industrial Ethernet Generic term for using the Ethernet standard in automation / industrial applications Specific Quality of Service requirements Real-time Cycle time (e.g. < 1 ms for motion control
Automotive Ethernet Prototype and test development with CANoe/CANalyzer.Ethernet
 Insert picture and click Align Title Graphic. Automotive Ethernet Prototype and test development with CANoe/CANalyzer.Ethernet Vector Webinar 2014 Hans-Werner Schaal Ver. 4.2.1, Jun 2014 Slide: 1 Agenda
Insert picture and click Align Title Graphic. Automotive Ethernet Prototype and test development with CANoe/CANalyzer.Ethernet Vector Webinar 2014 Hans-Werner Schaal Ver. 4.2.1, Jun 2014 Slide: 1 Agenda
How To Communicate With A Token Ring Network (Dihon)
") Token us Token -procedure: Only someone who possesses a certain ken (= bit sequence), may send. One example for a ken network: IEEE 80. Token us All stations should be treated equally, i.e. they have pass
Token us Token -procedure: Only someone who possesses a certain ken (= bit sequence), may send. One example for a ken network: IEEE 80. Token us All stations should be treated equally, i.e. they have pass
Medium Access Control (MAC) Protocols for Ad hoc Wireless Networks - III
 Protocols for Ad hoc Wireless Networks - III") Medium Access Control (MAC) Protocols for Ad hoc Wireless Networks - III CS: 647 Advanced Topics in Wireless Networks Drs. Baruch Awerbuch & Amitabh Mishra Department of Computer Science Johns Hopkins
Medium Access Control (MAC) Protocols for Ad hoc Wireless Networks - III CS: 647 Advanced Topics in Wireless Networks Drs. Baruch Awerbuch & Amitabh Mishra Department of Computer Science Johns Hopkins
Objectives. Lecture 4. How do computers communicate? How do computers communicate? Local asynchronous communication. How do computers communicate?
 Lecture 4 Continuation of transmission basics Chapter 3, pages 75-96 Dave Novak School of Business University of Vermont Objectives Line coding Modulation AM, FM, Phase Shift Multiplexing FDM, TDM, WDM
Lecture 4 Continuation of transmission basics Chapter 3, pages 75-96 Dave Novak School of Business University of Vermont Objectives Line coding Modulation AM, FM, Phase Shift Multiplexing FDM, TDM, WDM
A Transport Protocol for Multimedia Wireless Sensor Networks
 A Transport Protocol for Multimedia Wireless Sensor Networks Duarte Meneses, António Grilo, Paulo Rogério Pereira 1 NGI'2011: A Transport Protocol for Multimedia Wireless Sensor Networks Introduction Wireless
A Transport Protocol for Multimedia Wireless Sensor Networks Duarte Meneses, António Grilo, Paulo Rogério Pereira 1 NGI'2011: A Transport Protocol for Multimedia Wireless Sensor Networks Introduction Wireless
Tutorial Introduction
 Tutorial Introduction PURPOSE: This tutorial describes concepts related to communication busses, including attributes, functions, and the different types of bus systems. The intent is to provide a baseline
Tutorial Introduction PURPOSE: This tutorial describes concepts related to communication busses, including attributes, functions, and the different types of bus systems. The intent is to provide a baseline
The OSI Model and the TCP/IP Protocol Suite PROTOCOL LAYERS. Hierarchy. Services THE OSI MODEL
 The OSI Model and the TCP/IP Protocol Suite - the OSI model was never fully implemented. - The TCP/IP protocol suite became the dominant commercial architecture because it was used and tested extensively
The OSI Model and the TCP/IP Protocol Suite - the OSI model was never fully implemented. - The TCP/IP protocol suite became the dominant commercial architecture because it was used and tested extensively
FOUNDATION Fieldbus High Speed Ethernet Control System
 FOUNDATION Fieldbus High Speed Ethernet Control System Sean J. Vincent Fieldbus Inc. Austin, TX, USA KEYWORDS Fieldbus, High Speed Ethernet, H1, ABSTRACT FOUNDATION fieldbus is described in part by the
FOUNDATION Fieldbus High Speed Ethernet Control System Sean J. Vincent Fieldbus Inc. Austin, TX, USA KEYWORDS Fieldbus, High Speed Ethernet, H1, ABSTRACT FOUNDATION fieldbus is described in part by the
LIN (Local Interconnected Network)
") Slide 1 LIN (Local Interconnected Network) Fundamentals of the LIN Protocol Ralf Schwering,, Software Development Engineer Vector Informatik GmbH www.lin-subbus.org -1- Slide 2 Agenda Communication Principle
Slide 1 LIN (Local Interconnected Network) Fundamentals of the LIN Protocol Ralf Schwering,, Software Development Engineer Vector Informatik GmbH www.lin-subbus.org -1- Slide 2 Agenda Communication Principle
BROADBAND AND HIGH SPEED NETWORKS
 BROADBAND AND HIGH SPEED NETWORKS INTRODUCTION TO MUTIPLEXING Multiplexing is the set of techniques that allows the simultaneous transmission of multiple signals across a single data link INTRODUCTION
BROADBAND AND HIGH SPEED NETWORKS INTRODUCTION TO MUTIPLEXING Multiplexing is the set of techniques that allows the simultaneous transmission of multiple signals across a single data link INTRODUCTION
It explains the differences between the Plesiochronous Digital Hierarchy and the Synchronous Digital Hierarchy.
 TECHNICAL TUTORIAL Subject: SDH Date: October, 00 Prepared by: John Rumsey SDH Synchronous Digital Hierarchy. Introduction. The Plesiochronous Digital Hierarchy (PDH). The Synchronous Digital Hierarchy
TECHNICAL TUTORIAL Subject: SDH Date: October, 00 Prepared by: John Rumsey SDH Synchronous Digital Hierarchy. Introduction. The Plesiochronous Digital Hierarchy (PDH). The Synchronous Digital Hierarchy