Discrete Event Component Architecture for Modeling Ships
|
|
|
- Jonathan McLaughlin
- 4 years ago
- Views:
Transcription

1 Discrete Event Component Architecture for Modeling Ships Arnie Buss Research Associate Professor MOVES Institute
2 Report Documentation Page Form Approved OMB No Public reporting burden for the collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington VA Respondents should be aware that notwithstanding any other provision of law, no person shall be subject to a penalty for failing to comply with a collection of information if it does not display a currently valid OMB control number. 1. REPORT DATE JUL REPORT TYPE 3. DATES COVERED to TITLE AND SUBTITLE Discrete Event Component Architecture for Modeling Ships 5a. CONTRACT NUMBER 5b. GRANT NUMBER 5c. PROGRAM ELEMENT NUMBER 6. AUTHOR(S) 5d. PROJECT NUMBER 5e. TASK NUMBER 5f. WORK UNIT NUMBER 7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES) Naval Postgraduate School,Moves Institute,Monterey,CA, PERFORMING ORGANIZATION REPORT NUMBER 9. SPONSORING/MONITORING AGENCY NAME(S) AND ADDRESS(ES) 10. SPONSOR/MONITOR S ACRONYM(S) 12. DISTRIBUTION/AVAILABILITY STATEMENT Approved for public release; distribution unlimited 13. SUPPLEMENTARY NOTES Research & Education Summit, July 2010, Monterey, CA 14. ABSTRACT 11. SPONSOR/MONITOR S REPORT NUMBER(S) 15. SUBJECT TERMS 16. SECURITY CLASSIFICATION OF: 17. LIMITATION OF ABSTRACT a. REPORT unclassified b. ABSTRACT unclassified c. THIS PAGE unclassified Same as Report (SAR) 18. NUMBER OF PAGES 31 19a. NAME OF RESPONSIBLE PERSON Standard Form 298 (Rev. 8-98) Prescribed by ANSI Std Z39-18
3 Overview Objectives Sprint Through Component-Based Discrete Event Methodology Component Architecture for DES Modeling of Ships Status Next Steps 2
4 Objectives Analysis-oriented Evaluate good or ideal force levels Compare Tactics Evaluate new platforms in operational setting Evaluate new ship systems in operational setting Make changes or modifications to existing systems 3

5 Objectives Analysis-oriented Evaluate good or ideal force levels Compare Tactics Evaluate new platforms in operational setting Evaluate new ship systems in operational setting Make changes or modifications to existing systems 4
6 Event Graph 1. Event A occurs A 4. t time units in the future 5. Providing (i) is true) (i) t B X = X Causing State Transition 3. Then schedules Event B 5
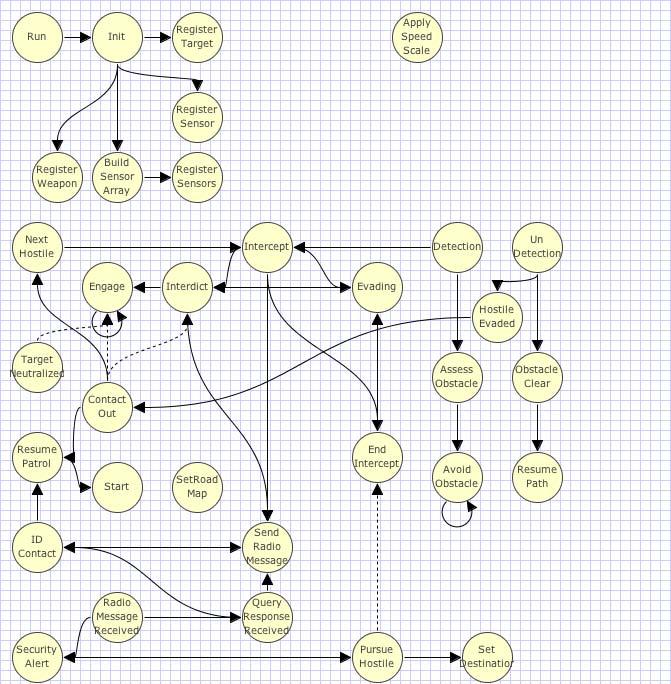
7 Example 6
8 Event Graph Components Each component encapsulates its own States Event Graph Parameters Event Graph 7
9 SimEvent Listening When Event B occurs B B D A C G F Event A Occurs Listener hears B Scheduling B & C Listener hears A But has no match And schedules D 8
10 Advantages of Event Graph Components Increases scaleability Functional decomposition Loose coupling Reuse Flexibility 9
11 Ship Operational Components Movement Tactics/Behavior Sensing Weapons Communication Containers 10
12 Key Criteria for Level of Detail Relevance to questions being asked of model Is it necessary to answer questions? Does it impact any estimated measures? Does more detail answer question any better? Ideal level of detail As simple as possible But no simpler Components allow for simple implementation of multi-level resolution 11
13 Modeling Movement Location cannot be DES state However, all movement can be described by an equation of motion Example: constant velocity DES state is initial conditions: x t) x ( t t ) v ( 0 0 ( 0 t0, x, v) 12
14 Mover Event Graph Component 13
15 Mover Manager Separate movement rule from movement logic Use listening to schedule next move Easy to define new movements rules Examples PathMoverManager PatrolMoverManager RandomMoverManager 14
16 Mover and Mover Manager 15
17 Sensing Detection only possible within maximum range of sensor Outside range, no interactions Canonical Event Sequence: Enter Range Detection Undetection Exit Range 16
18 Canonical Sequence StartMove Target EnterRange Detection Sensor Undetection ExitRange EndMove 17
19 For Uniform Linear Motion Time to Enter/Exit Range: t x v v 2 v 2 ( R 2 v x 2 2 ) ( x v) 2 18
20 Detection After Range is entered, Detection occurs sometime later Examples Cookie Cutter: delay = 0.0 Constant Rate: delay ~ Exp(l) Other distributions (e.g. Gamma) Glimpse: Every Δt, Detection w/prob p( ) 19
21 Sensing Framework Three types of objects Sensor classes Referee class Mediator classes Referee responsible for Enter/Exit Range Mediator responsible for Detection/Undetection Each Sensor/Target/Mediator triple implements a detection algorithm 20
22 Referee Responsible for computing & scheduling EnterRange and ExitRange events for all registered sensor/target pairs EnterRange events cause the appropriate Mediator to be tasked with adjudicating the actual detection Multiple instances of Referee can capture different bandwidths 21
23 Referee Event Graph 22
24 Mediator Can implement different detection algorithms for every Sensor/Target pair Can have given Sensor use one algorithm for one type of target and another for a different type of target Simple to implement Configure MediatorFactory Makes implementing new algorithms easy

25 Mediator Event Graph Enter Range t D t U Detection Undetection Exit Range
26 Basic Organization of Platform Weapon System 1 Multiple Weapons Systems Weapon System 2 Behaviors Behaviors based on perception Weapon System 3 Multiple Mover Managers. (Only 1 Active at any time.) MoverManager1 MoverManager2 Sensor1 Sensor2 Multiple Sensors Sensor3 One Mover Component Mover 25
27 Implementation Simkit (Java) Viskit (XML/Java) SimPykit (Python) 26
28 Loose Coupling Between Model and Display (DIS) DES Model Network DIS Pinger PDU PDU DIS Client Display 27
29 Client Displays Hand-crafted 2-D (one-offs) XJ3D Delta3D (Under Construction) Using DIS SimPykit using Python bindings 28
30 Status Framework complete for: Movement Movement tactics Sensing Hooks for behavioral response Simple behaviors To be done: Complete design of behavioral components Complete first-level implementation (code) 29
31 Next Steps Continue work on modeling behavior and tactics Complete design of complex components First version of TCraft platform as exemplar Work towards complete (modeler-friendly) simulation 30
32 Questions? Arnie Buss Research Associate Professor MOVES Institute 31
Asset Management- Acquisitions
 Indefinite Delivery, Indefinite Quantity (IDIQ) contracts used for these services: al, Activity & Master Plans; Land Use Analysis; Anti- Terrorism, Circulation & Space Management Studies; Encroachment
Indefinite Delivery, Indefinite Quantity (IDIQ) contracts used for these services: al, Activity & Master Plans; Land Use Analysis; Anti- Terrorism, Circulation & Space Management Studies; Encroachment
Overview Presented by: Boyd L. Summers
 Overview Presented by: Boyd L. Summers Systems & Software Technology Conference SSTC May 19 th, 2011 1 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Overview Presented by: Boyd L. Summers Systems & Software Technology Conference SSTC May 19 th, 2011 1 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Report Documentation Page
 (c)2002 American Institute Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average 1 hour per response, including the
(c)2002 American Institute Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average 1 hour per response, including the
Using the Advancement Degree of Difficulty (AD 2 ) as an input to Risk Management
 as an input to Risk Management") Using the Advancement Degree of Difficulty (AD 2 ) as an input to Risk Management James W. Bilbro JB Consulting International Huntsville, AL Multi-dimensional Assessment of Technology Maturity Technology
Using the Advancement Degree of Difficulty (AD 2 ) as an input to Risk Management James W. Bilbro JB Consulting International Huntsville, AL Multi-dimensional Assessment of Technology Maturity Technology
DEFENSE CONTRACT AUDIT AGENCY
 DEFENSE CONTRACT AUDIT AGENCY Fundamental Building Blocks for an Acceptable Accounting System Presented by Sue Reynaga DCAA Branch Manager San Diego Branch Office August 24, 2011 Report Documentation Page
DEFENSE CONTRACT AUDIT AGENCY Fundamental Building Blocks for an Acceptable Accounting System Presented by Sue Reynaga DCAA Branch Manager San Diego Branch Office August 24, 2011 Report Documentation Page
Headquarters U.S. Air Force
 Headquarters U.S. Air Force I n t e g r i t y - S e r v i c e - E x c e l l e n c e Air Force Technology Readiness Assessment (TRA) Process for Major Defense Acquisition Programs LtCol Ed Masterson Mr
Headquarters U.S. Air Force I n t e g r i t y - S e r v i c e - E x c e l l e n c e Air Force Technology Readiness Assessment (TRA) Process for Major Defense Acquisition Programs LtCol Ed Masterson Mr
EAD Expected Annual Flood Damage Computation
 US Army Corps of Engineers Hydrologic Engineering Center Generalized Computer Program EAD Expected Annual Flood Damage Computation User's Manual March 1989 Original: June 1977 Revised: August 1979, February
US Army Corps of Engineers Hydrologic Engineering Center Generalized Computer Program EAD Expected Annual Flood Damage Computation User's Manual March 1989 Original: June 1977 Revised: August 1979, February
THE MIMOSA OPEN SOLUTION COLLABORATIVE ENGINEERING AND IT ENVIRONMENTS WORKSHOP
 THE MIMOSA OPEN SOLUTION COLLABORATIVE ENGINEERING AND IT ENVIRONMENTS WORKSHOP By Dr. Carl M. Powe, Jr. 2-3 March 2005 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden
THE MIMOSA OPEN SOLUTION COLLABORATIVE ENGINEERING AND IT ENVIRONMENTS WORKSHOP By Dr. Carl M. Powe, Jr. 2-3 March 2005 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden
RT 24 - Architecture, Modeling & Simulation, and Software Design
 RT 24 - Architecture, Modeling & Simulation, and Software Design Dennis Barnabe, Department of Defense Michael zur Muehlen & Anne Carrigy, Stevens Institute of Technology Drew Hamilton, Auburn University
RT 24 - Architecture, Modeling & Simulation, and Software Design Dennis Barnabe, Department of Defense Michael zur Muehlen & Anne Carrigy, Stevens Institute of Technology Drew Hamilton, Auburn University
John Mathieson US Air Force (WR ALC) Systems & Software Technology Conference Salt Lake City, Utah 19 May 2011
 Systems & Software Technology Conference Salt Lake City, Utah 19 May 2011") John Mathieson US Air Force (WR ALC) Systems & Software Technology Conference Salt Lake City, Utah 19 May 2011 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the
John Mathieson US Air Force (WR ALC) Systems & Software Technology Conference Salt Lake City, Utah 19 May 2011 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the
Advanced Micro Ring Resonator Filter Technology
 Advanced Micro Ring Resonator Filter Technology G. Lenz and C. K. Madsen Lucent Technologies, Bell Labs Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Advanced Micro Ring Resonator Filter Technology G. Lenz and C. K. Madsen Lucent Technologies, Bell Labs Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Mr. Steve Mayer, PMP, P.E. McClellan Remediation Program Manger Air Force Real Property Agency. May 11, 2011
 Mr. Steve Mayer, PMP, P.E. McClellan Remediation Program Manger Air Force Real Property Agency May 11, 2011 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Mr. Steve Mayer, PMP, P.E. McClellan Remediation Program Manger Air Force Real Property Agency May 11, 2011 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Monitoring of Arctic Conditions from a Virtual Constellation of Synthetic Aperture Radar Satellites
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Monitoring of Arctic Conditions from a Virtual Constellation of Synthetic Aperture Radar Satellites Hans C. Graber RSMAS
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Monitoring of Arctic Conditions from a Virtual Constellation of Synthetic Aperture Radar Satellites Hans C. Graber RSMAS
A GPS Digital Phased Array Antenna and Receiver
 A GPS Digital Phased Array Antenna and Receiver Dr. Alison Brown, Randy Silva; NAVSYS Corporation ABSTRACT NAVSYS High Gain Advanced GPS Receiver (HAGR) uses a digital beam-steering antenna array to enable
A GPS Digital Phased Array Antenna and Receiver Dr. Alison Brown, Randy Silva; NAVSYS Corporation ABSTRACT NAVSYS High Gain Advanced GPS Receiver (HAGR) uses a digital beam-steering antenna array to enable
Cancellation of Nongroup Health Insurance Policies
 Cancellation of Nongroup Health Insurance Policies Bernadette Fernandez Specialist in Health Care Financing Annie L. Mach Analyst in Health Care Financing November 19, 2013 Congressional Research Service
Cancellation of Nongroup Health Insurance Policies Bernadette Fernandez Specialist in Health Care Financing Annie L. Mach Analyst in Health Care Financing November 19, 2013 Congressional Research Service
PROBLEM STATEMENT: Will reducing the ASD for Kadena AB F-15 C/Ds increase the CPFH for this Mission Design Series (MDS)?
?") CONSULTING REPORT Kadena F-15 C/D Cost per Flying Hour Analysis PROJECT MANAGERS: Capt Jeremy Howe and Capt Kevin Dawson AFLMA PROJECT NUMBER: LM200520700 16 August 2005 BACKGROUND: Kadena AB is currently
CONSULTING REPORT Kadena F-15 C/D Cost per Flying Hour Analysis PROJECT MANAGERS: Capt Jeremy Howe and Capt Kevin Dawson AFLMA PROJECT NUMBER: LM200520700 16 August 2005 BACKGROUND: Kadena AB is currently
Guide to Using DoD PKI Certificates in Outlook 2000
 Report Number: C4-017R-01 Guide to Using DoD PKI Certificates in Outlook 2000 Security Evaluation Group Author: Margaret Salter Updated: April 6, 2001 Version 1.0 National Security Agency 9800 Savage Rd.
Report Number: C4-017R-01 Guide to Using DoD PKI Certificates in Outlook 2000 Security Evaluation Group Author: Margaret Salter Updated: April 6, 2001 Version 1.0 National Security Agency 9800 Savage Rd.
Agent Frameworks for Discrete Event Social Simulations
 Agent Frameworks for Discrete Event Social Simulations Jonathan K. Alt Stephen Lieberman Modeling, Virtual Environments and Simulation (MOVES) Institute 700 Dyer Road Naval Postgraduate School Monterey,
Agent Frameworks for Discrete Event Social Simulations Jonathan K. Alt Stephen Lieberman Modeling, Virtual Environments and Simulation (MOVES) Institute 700 Dyer Road Naval Postgraduate School Monterey,
DCAA and the Small Business Innovative Research (SBIR) Program
 Program") Defense Contract Audit Agency (DCAA) DCAA and the Small Business Innovative Research (SBIR) Program Judice Smith and Chang Ford DCAA/Financial Liaison Advisors NAVAIR 2010 Small Business Aviation Technology
Defense Contract Audit Agency (DCAA) DCAA and the Small Business Innovative Research (SBIR) Program Judice Smith and Chang Ford DCAA/Financial Liaison Advisors NAVAIR 2010 Small Business Aviation Technology
Issue Paper. Wargaming Homeland Security and Army Reserve Component Issues. By Professor Michael Pasquarett
 Issue Paper Center for Strategic Leadership, U.S. Army War College May 2003 Volume 04-03 Wargaming Homeland Security and Army Reserve Component Issues By Professor Michael Pasquarett Background The President
Issue Paper Center for Strategic Leadership, U.S. Army War College May 2003 Volume 04-03 Wargaming Homeland Security and Army Reserve Component Issues By Professor Michael Pasquarett Background The President
73rd MORSS CD Cover Page UNCLASSIFIED DISCLOSURE FORM CD Presentation
 73rd MORSS CD Cover Page UNCLASSIFIED DISCLOSURE FORM CD Presentation 21-23 June 2005, at US Military Academy, West Point, NY 712CD For office use only 41205 Please complete this form 712CD as your cover
73rd MORSS CD Cover Page UNCLASSIFIED DISCLOSURE FORM CD Presentation 21-23 June 2005, at US Military Academy, West Point, NY 712CD For office use only 41205 Please complete this form 712CD as your cover
THE FLATWORLD SIMULATION CONTROL ARCHITECTURE (FSCA): A FRAMEWORK FOR SCALABLE IMMERSIVE VISUALIZATION SYSTEMS
: A FRAMEWORK FOR SCALABLE IMMERSIVE VISUALIZATION SYSTEMS") THE FLATWORLD SIMULATION CONTROL ARCHITECTURE (FSCA): A FRAMEWORK FOR SCALABLE IMMERSIVE VISUALIZATION SYSTEMS Anton Treskunov, Jarrell Pair*, and Bill Swartout Institute for Creative Technologies University
THE FLATWORLD SIMULATION CONTROL ARCHITECTURE (FSCA): A FRAMEWORK FOR SCALABLE IMMERSIVE VISUALIZATION SYSTEMS Anton Treskunov, Jarrell Pair*, and Bill Swartout Institute for Creative Technologies University
Pima Community College Planning Grant For Autonomous Intelligent Network of Systems (AINS) Science, Mathematics & Engineering Education Center
 Science, Mathematics & Engineering Education Center") Pima Community College Planning Grant For Autonomous Intelligent Network of Systems (AINS) Science, Mathematics & Engineering Education Center Technical Report - Final Award Number N00014-03-1-0844 Mod.
Pima Community College Planning Grant For Autonomous Intelligent Network of Systems (AINS) Science, Mathematics & Engineering Education Center Technical Report - Final Award Number N00014-03-1-0844 Mod.
IISUP-. NAVAL SUPPLY SVSTE:MS COMMAND. Ready. Resourceful. Responsive!
 ~ IISUP-. NAVAL SUPPLY SVSTE:MS COMMAND Ready. Resourceful. Responsive! Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated
~ IISUP-. NAVAL SUPPLY SVSTE:MS COMMAND Ready. Resourceful. Responsive! Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated
CAPTURE-THE-FLAG: LEARNING COMPUTER SECURITY UNDER FIRE
 CAPTURE-THE-FLAG: LEARNING COMPUTER SECURITY UNDER FIRE LCDR Chris Eagle, and John L. Clark Naval Postgraduate School Abstract: Key words: In this paper, we describe the Capture-the-Flag (CTF) activity
CAPTURE-THE-FLAG: LEARNING COMPUTER SECURITY UNDER FIRE LCDR Chris Eagle, and John L. Clark Naval Postgraduate School Abstract: Key words: In this paper, we describe the Capture-the-Flag (CTF) activity
An Overview of Romanian Command and Control Systems
 Col. eng. Stefan Cantaragiu, Ph. D. Military Equipment and Technologies Research Agency P.O. Box 51-16 76550 Bucharest ROMANIA Tel.: +40 1 4231483 Fax: +40 1 4231030 scantaragiu@acttm.ro Lt. eng. Adrian
Col. eng. Stefan Cantaragiu, Ph. D. Military Equipment and Technologies Research Agency P.O. Box 51-16 76550 Bucharest ROMANIA Tel.: +40 1 4231483 Fax: +40 1 4231030 scantaragiu@acttm.ro Lt. eng. Adrian
Mobile Robot Knowledge Base
 Mobile Robot Knowledge Base Tracy Heath Pastore* a, Mitchell Barnes** a, Rory Hallman b b SPAWAR Systems Center, San Diego, Code 2371, 53560 Hull Street, San Diego, CA 92152; b Computer Sciences Corporation,
Mobile Robot Knowledge Base Tracy Heath Pastore* a, Mitchell Barnes** a, Rory Hallman b b SPAWAR Systems Center, San Diego, Code 2371, 53560 Hull Street, San Diego, CA 92152; b Computer Sciences Corporation,
FIRST IMPRESSION EXPERIMENT REPORT (FIER)
") THE MNE7 OBJECTIVE 3.4 CYBER SITUATIONAL AWARENESS LOE FIRST IMPRESSION EXPERIMENT REPORT (FIER) 1. Introduction The Finnish Defence Forces Concept Development & Experimentation Centre (FDF CD&E Centre)
THE MNE7 OBJECTIVE 3.4 CYBER SITUATIONAL AWARENESS LOE FIRST IMPRESSION EXPERIMENT REPORT (FIER) 1. Introduction The Finnish Defence Forces Concept Development & Experimentation Centre (FDF CD&E Centre)
Simulation of Air Flow Through a Test Chamber
 Simulation of Air Flow Through a Test Chamber by Gregory K. Ovrebo ARL-MR- 0680 December 2007 Approved for public release; distribution unlimited. NOTICES Disclaimers The findings in this report are not
Simulation of Air Flow Through a Test Chamber by Gregory K. Ovrebo ARL-MR- 0680 December 2007 Approved for public release; distribution unlimited. NOTICES Disclaimers The findings in this report are not
2010 2011 Military Health System Conference
 2010 2011 Military Health System Conference Population Health Management The Missing Element of PCMH Sharing The Quadruple Knowledge: Aim: Working Achieving Together, Breakthrough Achieving Performance
2010 2011 Military Health System Conference Population Health Management The Missing Element of PCMH Sharing The Quadruple Knowledge: Aim: Working Achieving Together, Breakthrough Achieving Performance
ELECTRONIC HEALTH RECORDS. Fiscal Year 2013 Expenditure Plan Lacks Key Information Needed to Inform Future Funding Decisions
 United States Government Accountability Office Report to Congressional July 2014 ELECTRONIC HEALTH RECORDS Fiscal Year 2013 Expenditure Plan Lacks Key Information Needed to Inform Future Funding Decisions
United States Government Accountability Office Report to Congressional July 2014 ELECTRONIC HEALTH RECORDS Fiscal Year 2013 Expenditure Plan Lacks Key Information Needed to Inform Future Funding Decisions
CERT Virtual Flow Collection and Analysis
 CERT Virtual Flow Collection and Analysis For Training and Simulation George Warnagiris 2011 Carnegie Mellon University Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden
CERT Virtual Flow Collection and Analysis For Training and Simulation George Warnagiris 2011 Carnegie Mellon University Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden
DEFENSE BUSINESS PRACTICE IMPLEMENTATION BOARD
 Defense Business Practice Implementation Board DEFENSE BUSINESS PRACTICE IMPLEMENTATION BOARD Report to the Senior Executive Council, Department of Defense MANAGEMENT INFORMATION TASK GROUP Report FY02-3
Defense Business Practice Implementation Board DEFENSE BUSINESS PRACTICE IMPLEMENTATION BOARD Report to the Senior Executive Council, Department of Defense MANAGEMENT INFORMATION TASK GROUP Report FY02-3
In June 1998 the Joint Military Intelligence. Intelligence Education for Joint Warfighting A. DENIS CLIFT
 Defense Intelligence Analysis Center, home of JMIC. Intelligence Education for Joint Warfighting Courtesy Joint Military Intelligence College By A. DENIS CLIFT In June 1998 the Joint Military Intelligence
Defense Intelligence Analysis Center, home of JMIC. Intelligence Education for Joint Warfighting Courtesy Joint Military Intelligence College By A. DENIS CLIFT In June 1998 the Joint Military Intelligence
NAVSUP FLC NORFOLK PHILADELPHIA OFFICE
 NAVSUP FLC NORFOLK PHILADELPHIA OFFICE Gerald Furey Deputy for Small Business Ready. Resourceful. Responsive! 1 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the
NAVSUP FLC NORFOLK PHILADELPHIA OFFICE Gerald Furey Deputy for Small Business Ready. Resourceful. Responsive! 1 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the
Dr. Gary S. E. Lagerloef Earth and Space Research, 1910 Fairview Ave E
 Establishing a NOAA Operational Data Center for Surface Currents Derived from Satellite Altimeters and Scatterometers; Pilot Study for the Tropical Pacific Including the Hawaiian Islands and US Territorial
Establishing a NOAA Operational Data Center for Surface Currents Derived from Satellite Altimeters and Scatterometers; Pilot Study for the Tropical Pacific Including the Hawaiian Islands and US Territorial
AFRL-RX-WP-TP-2008-4023
 AFRL-RX-WP-TP-2008-4023 HOW KILLDEER MOUNTAIN MANUFACTURING IS OPTIMIZING AEROSPACE SUPPLY CHAIN VISIBILITY USING RFID (Postprint) Jeanne Duckett Killdeer Mountain Manufacturing, Inc. FEBRUARY 2008 Final
AFRL-RX-WP-TP-2008-4023 HOW KILLDEER MOUNTAIN MANUFACTURING IS OPTIMIZING AEROSPACE SUPPLY CHAIN VISIBILITY USING RFID (Postprint) Jeanne Duckett Killdeer Mountain Manufacturing, Inc. FEBRUARY 2008 Final
OPTICAL IMAGES DUE TO LENSES AND MIRRORS *
 1 OPTICAL IMAGES DUE TO LENSES AND MIRRORS * Carl E. Mungan U.S. Naval Academy, Annapolis, MD ABSTRACT The properties of real and virtual images formed by lenses and mirrors are reviewed. Key ideas are
1 OPTICAL IMAGES DUE TO LENSES AND MIRRORS * Carl E. Mungan U.S. Naval Academy, Annapolis, MD ABSTRACT The properties of real and virtual images formed by lenses and mirrors are reviewed. Key ideas are
Multiple Network Marketing coordination Model
 REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
Addressing the Real-World Challenges in the Development of Propulsion IVHM Technology Experiment (PITEX)
") NASA/CR 2005-213422 AIAA 2004 6361 Addressing the Real-World Challenges in the Development of Propulsion IVHM Technology Experiment (PITEX) William A. Maul, Amy Chicatelli, and Christopher E. Fulton Analex
NASA/CR 2005-213422 AIAA 2004 6361 Addressing the Real-World Challenges in the Development of Propulsion IVHM Technology Experiment (PITEX) William A. Maul, Amy Chicatelli, and Christopher E. Fulton Analex
What Makes a Message Stick? - The Role of Content and Context in Social Media Epidemics
 ANU College of Engineering and Computer Science Building 108, North Road ANU, Canberra 0200, Australia Final Report for AOARD Grant 124041 What Makes a Message Stick? - The Role of Content and Context
ANU College of Engineering and Computer Science Building 108, North Road ANU, Canberra 0200, Australia Final Report for AOARD Grant 124041 What Makes a Message Stick? - The Role of Content and Context
A DOCTORAL PROGRAM WITH SPECIALIZATION IN INFORMATION SECURITY A High Assurance Constructive Security Approach
 A DOCTORAL PROGRAM WITH SPECIALIZATION IN INFORMATION SECURITY A High Assurance Constructive Security Approach Cynthia E. Irvine and Timothy E. Levin Department of Computer Science, Naval Postgraduate
A DOCTORAL PROGRAM WITH SPECIALIZATION IN INFORMATION SECURITY A High Assurance Constructive Security Approach Cynthia E. Irvine and Timothy E. Levin Department of Computer Science, Naval Postgraduate
Algorithmic Research and Software Development for an Industrial Strength Sparse Matrix Library for Parallel Computers
 The Boeing Company P.O.Box3707,MC7L-21 Seattle, WA 98124-2207 Final Technical Report February 1999 Document D6-82405 Copyright 1999 The Boeing Company All Rights Reserved Algorithmic Research and Software
The Boeing Company P.O.Box3707,MC7L-21 Seattle, WA 98124-2207 Final Technical Report February 1999 Document D6-82405 Copyright 1999 The Boeing Company All Rights Reserved Algorithmic Research and Software
Dynamic IR Scene Projector Based Upon the Digital Micromirror Device
 Dynamic IR Scene Projector Based Upon the Digital Micromirror Device D. Brett Beasley, Matt Bender, Jay Crosby, Tim Messer, and Daniel A. Saylor Optical Sciences Corporation www.opticalsciences.com P.O.
Dynamic IR Scene Projector Based Upon the Digital Micromirror Device D. Brett Beasley, Matt Bender, Jay Crosby, Tim Messer, and Daniel A. Saylor Optical Sciences Corporation www.opticalsciences.com P.O.
Integrated Force Method Solution to Indeterminate Structural Mechanics Problems
 NASA/TP 2004-207430 Integrated Force Method Solution to Indeterminate Structural Mechanics Problems Surya N. Patnaik Ohio Aerospace Institute, Brook Park, Ohio Dale A. Hopkins and Gary R. Halford Glenn
NASA/TP 2004-207430 Integrated Force Method Solution to Indeterminate Structural Mechanics Problems Surya N. Patnaik Ohio Aerospace Institute, Brook Park, Ohio Dale A. Hopkins and Gary R. Halford Glenn
REPORT DOCUMENTATION PAGE *
 REPORT DOCUMENTATION PAGE * Form Approved OMBNo. 07040188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE * Form Approved OMBNo. 07040188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
AUSTRALIAN INNOVATIONS
 AUSTRALIAN INNOVATIONS Recent Developments in Australian EVM Practices Jim Muir & Kirsty McLean October 1998 REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burder for this collection
AUSTRALIAN INNOVATIONS Recent Developments in Australian EVM Practices Jim Muir & Kirsty McLean October 1998 REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burder for this collection
UMass at TREC 2008 Blog Distillation Task
 UMass at TREC 2008 Blog Distillation Task Jangwon Seo and W. Bruce Croft Center for Intelligent Information Retrieval University of Massachusetts, Amherst Abstract This paper presents the work done for
UMass at TREC 2008 Blog Distillation Task Jangwon Seo and W. Bruce Croft Center for Intelligent Information Retrieval University of Massachusetts, Amherst Abstract This paper presents the work done for
Intelligence Community Public Key Infrastructure (IC PKI)
") Intelligence Community Public Key Infrastructure (IC PKI) 2002 The MITRE Corporation This technical data was produced for the U.S. Government under contract 99-G000109-000, and is subject to the Rights
Intelligence Community Public Key Infrastructure (IC PKI) 2002 The MITRE Corporation This technical data was produced for the U.S. Government under contract 99-G000109-000, and is subject to the Rights
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
Ultra-low Sulfur Diesel Classification with Near-Infrared Spectroscopy and Partial Least Squares
 1132 Energy & Fuels 2009, 23, 1132 1133 Communications Ultra-low Sulfur Diesel Classification with Near-Infrared Spectroscopy and Partial Least Squares Jeffrey A. Cramer, Robert E. Morris,* Mark H. Hammond,
1132 Energy & Fuels 2009, 23, 1132 1133 Communications Ultra-low Sulfur Diesel Classification with Near-Infrared Spectroscopy and Partial Least Squares Jeffrey A. Cramer, Robert E. Morris,* Mark H. Hammond,
Award Number: MIPR 3GD3DJ3078. TITLE: Outcome Analysis Tool for Army Refractive Surgery Program. PRINCIPAL INVESTIGATOR: Kraig S. Bower, M.D.
 AD Award Number: MIPR 3GD3DJ3078 TITLE: Outcome Analysis Tool for Army Refractive Surgery Program PRINCIPAL INVESTIGATOR: Kraig S. Bower, M.D. CONTRACTING ORGANIZATION: Walter Reed Army Medical Center
AD Award Number: MIPR 3GD3DJ3078 TITLE: Outcome Analysis Tool for Army Refractive Surgery Program PRINCIPAL INVESTIGATOR: Kraig S. Bower, M.D. CONTRACTING ORGANIZATION: Walter Reed Army Medical Center
Cyber Security Training and Awareness Through Game Play
 Cyber Security Training and Awareness Through Game Play Benjamin D. Cone, Michael F. Thompson, Cynthia E. Irvine, and Thuy D. Nguyen Naval Postgraduate School, Monterey, CA 93943, USA {bdcone,mfthomps,irvine,tdnguyen}@nps.edu
Cyber Security Training and Awareness Through Game Play Benjamin D. Cone, Michael F. Thompson, Cynthia E. Irvine, and Thuy D. Nguyen Naval Postgraduate School, Monterey, CA 93943, USA {bdcone,mfthomps,irvine,tdnguyen}@nps.edu
Non-Autoclave (Prepreg) Manufacturing Technology
 Manufacturing Technology") Non-Autoclave (Prepreg) Manufacturing Technology Gary G. Bond, John M. Griffith, Gail L. Hahn The Boeing Company Chris Bongiovanni, Jack Boyd Cytec Engineered Materials 9 September 2008 Report Documentation
Non-Autoclave (Prepreg) Manufacturing Technology Gary G. Bond, John M. Griffith, Gail L. Hahn The Boeing Company Chris Bongiovanni, Jack Boyd Cytec Engineered Materials 9 September 2008 Report Documentation
Aircraft Cleanability and Corrosion Issues 26 February 2008. Craig Matzdorf NAVAIR
 Aircraft Cleanability and Corrosion Issues 26 February 2008 Craig Matzdorf NAVAIR Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is
Aircraft Cleanability and Corrosion Issues 26 February 2008 Craig Matzdorf NAVAIR Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is
Army Environmental Policy and ISO 14001
 Army Environmental Policy and ISO 14001 Army Environmental Policy and ISO 14001 Rick Sinclair and Rochie Tschirhart Since the 1970s, the U.S. Army has instituted environmental policies, programs, regulations,
Army Environmental Policy and ISO 14001 Army Environmental Policy and ISO 14001 Rick Sinclair and Rochie Tschirhart Since the 1970s, the U.S. Army has instituted environmental policies, programs, regulations,
An Oil-Free Thrust Foil Bearing Facility Design, Calibration, and Operation
 NASA/TM 2005-213568 An Oil-Free Thrust Foil Bearing Facility Design, Calibration, and Operation Steve Bauman Glenn Research Center, Cleveland, Ohio March 2005 The NASA STI Program Office... in Profile
NASA/TM 2005-213568 An Oil-Free Thrust Foil Bearing Facility Design, Calibration, and Operation Steve Bauman Glenn Research Center, Cleveland, Ohio March 2005 The NASA STI Program Office... in Profile
TITLE: The Impact Of Prostate Cancer Treatment-Related Symptoms On Low-Income Latino Couples
 AD Award Number: W81WH-07-1-0069 TITLE: The Impact Of Prostate Cancer Treatment-Related Symptoms On Low-Income Latino Couples PRINCIPAL INVESTIGATOR: Sally L. Maliski, Ph.D., R.N. CONTRACTING ORGANIZATION:
AD Award Number: W81WH-07-1-0069 TITLE: The Impact Of Prostate Cancer Treatment-Related Symptoms On Low-Income Latino Couples PRINCIPAL INVESTIGATOR: Sally L. Maliski, Ph.D., R.N. CONTRACTING ORGANIZATION:
Achieving QoS for Aeronautical Telecommunication Networks Over Differentiated Services
 NASA/TM 2001-210754 Achieving QoS for Aeronautical Telecommunication Networks Over Differentiated Services Haowei Bai and Mohammed Atiquzzaman The University of Dayton, Dayton, Ohio William Ivancic Glenn
NASA/TM 2001-210754 Achieving QoS for Aeronautical Telecommunication Networks Over Differentiated Services Haowei Bai and Mohammed Atiquzzaman The University of Dayton, Dayton, Ohio William Ivancic Glenn
Graduate Level Credit for Resident EWS Students. Natasha McEachin CG 1
 Graduate Level Credit for Resident EWS Students Natasha McEachin CG 1 February 20, 2009 1 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information
Graduate Level Credit for Resident EWS Students Natasha McEachin CG 1 February 20, 2009 1 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information
High Power Density Capacitor Charging Power Supply Development for Repetitive Pulsed Power
 High Power Density Capacitor Charging Power Supply Development for Repetitive Pulsed Power M. M. McQuage, V.P. McDowell, F.E. Peterkin, and J. A. Pasour Directed Energy Technology Office, Code B2 Dahlgren
High Power Density Capacitor Charging Power Supply Development for Repetitive Pulsed Power M. M. McQuage, V.P. McDowell, F.E. Peterkin, and J. A. Pasour Directed Energy Technology Office, Code B2 Dahlgren
UNCLASSIFIED LOW-COST MINIATURE INTERFACE AND CONTROL SYSTEMS FOR SMART SENSORS, TACTICAL RADIOS, AND COMPUTER NETWORKS
 LOW-COST MINIATURE INTERFACE AND CONTROL SYSTEMS FOR SMART SENSORS, TACTICAL RADIOS, AND COMPUTER NETWORKS Brett Martin and Dale Bryan Naval Command, Control, and Ocean Surveillance Center Research, Development,
LOW-COST MINIATURE INTERFACE AND CONTROL SYSTEMS FOR SMART SENSORS, TACTICAL RADIOS, AND COMPUTER NETWORKS Brett Martin and Dale Bryan Naval Command, Control, and Ocean Surveillance Center Research, Development,
Software Security Engineering: A Guide for Project Managers
 Software Security Engineering: A Guide for Project Managers Gary McGraw Julia H. Allen Nancy Mead Robert J. Ellison Sean Barnum May 2013 ABSTRACT: Software is ubiquitous. Many of the products, services,
Software Security Engineering: A Guide for Project Managers Gary McGraw Julia H. Allen Nancy Mead Robert J. Ellison Sean Barnum May 2013 ABSTRACT: Software is ubiquitous. Many of the products, services,
THE NATIONAL SHIPBUILDING RESEARCH PROGRAM
 SHIP PRODUCTION COMMITTEE FACILITIES AND ENVIRONMENTAL EFFECTS SURFACE PREPARATION AND COATINGS DESIGN/PRODUCTION INTEGRATION HUMAN RESOURCE INNOVATION MARINE INDUSTRY STANDARDS WELDING INDUSTRIAL ENGINEERING
SHIP PRODUCTION COMMITTEE FACILITIES AND ENVIRONMENTAL EFFECTS SURFACE PREPARATION AND COATINGS DESIGN/PRODUCTION INTEGRATION HUMAN RESOURCE INNOVATION MARINE INDUSTRY STANDARDS WELDING INDUSTRIAL ENGINEERING
Development and Support for the USGODAE Server
 Development and Support for the USGODAE Server Mr. Mike Clancy Fleet Numerical Meteorology and Oceanography Center 7 Grace Hopper Ave, Stop 1 Monterey, CA 93943-5501 phone: (831) 656-4414 fax: (831) 656-4489
Development and Support for the USGODAE Server Mr. Mike Clancy Fleet Numerical Meteorology and Oceanography Center 7 Grace Hopper Ave, Stop 1 Monterey, CA 93943-5501 phone: (831) 656-4414 fax: (831) 656-4489
Evaluation of a 10 kv, 400 ka Si SGTO at High di/dt
 Evaluation of a kv, ka Si SGTO at High di/dt Heather O Brien, William Shaheen, Timothy Crowley Berkeley Research Associates, U.S. Army Research Laboratory, Attn: Berkeley Contractor 8 Powder Mill Road,
Evaluation of a kv, ka Si SGTO at High di/dt Heather O Brien, William Shaheen, Timothy Crowley Berkeley Research Associates, U.S. Army Research Laboratory, Attn: Berkeley Contractor 8 Powder Mill Road,
mini w Requirements Analysis Defense Commissary Agency Credit Card Program Logistics Management Institute Credit Card Terminals and Printers v / i
 Logistics Management Institute Requirements Analysis Defense Commissary Agency Credit Card Program Credit Card Terminals and Printers CA303LN32 Andrew T. Rothstein ^^Mj^msmmnz mini w I v / i November 1995
Logistics Management Institute Requirements Analysis Defense Commissary Agency Credit Card Program Credit Card Terminals and Printers CA303LN32 Andrew T. Rothstein ^^Mj^msmmnz mini w I v / i November 1995
Jack of All Trades, Master of None: Combat Engineer Officer Assignments in the Marine Corps. EWS Contemporary Issue Paper
 Jack of All Trades, Master of None: Combat Engineer Officer Assignments in the Marine Corps Subject Area General EWS 2006 Jack of All Trades, Master of None: Combat Engineer Officer Assignments in the
Jack of All Trades, Master of None: Combat Engineer Officer Assignments in the Marine Corps Subject Area General EWS 2006 Jack of All Trades, Master of None: Combat Engineer Officer Assignments in the
Is Indemnification a Barrier to Public-Private Partnerships?
 LOGISTICS MANAGEMENT INSTITUTE Is Indemnification a Barrier to Public-Private Partnerships? LG301L3 (REV 1)/APRIL 2004 By Eric F. Herzberg The Department of Defense has designated public-private partnerships
LOGISTICS MANAGEMENT INSTITUTE Is Indemnification a Barrier to Public-Private Partnerships? LG301L3 (REV 1)/APRIL 2004 By Eric F. Herzberg The Department of Defense has designated public-private partnerships
A Limited Objective Experiment on Wireless Peer-To-Peer Collaborative Networking
 A Limited Objective Experiment on Wireless Peer-To-Peer Collaborative Networking Dr. Alex Bordetsky LCDR Glenn R. Cook Dr. Bill Kemple LCDR Timothy Thate Naval Postgraduate School Department of Information
A Limited Objective Experiment on Wireless Peer-To-Peer Collaborative Networking Dr. Alex Bordetsky LCDR Glenn R. Cook Dr. Bill Kemple LCDR Timothy Thate Naval Postgraduate School Department of Information
An Application of an Iterative Approach to DoD Software Migration Planning
 An Application of an Iterative Approach to DoD Software Migration Planning John Bergey Liam O Brien Dennis Smith September 2002 Product Line Practice Initiative Unlimited distribution subject to the copyright.
An Application of an Iterative Approach to DoD Software Migration Planning John Bergey Liam O Brien Dennis Smith September 2002 Product Line Practice Initiative Unlimited distribution subject to the copyright.
E X A D A T A NEW EXPLOSIVES ACCIDENT DATABASE
 E X A D A T A NEW EXPLOSIVES ACCIDENT DATABASE Peter O. Kummer dipl. Ing. HTL/SIA, EUR ING BIENZ, KUMMER & PARTNER LTD, Langägertenstrasse 6 CH-8125 ZOLLIKERBERG, SWITZERLAND Tel: int 41 1 391 27 37 FAX:
E X A D A T A NEW EXPLOSIVES ACCIDENT DATABASE Peter O. Kummer dipl. Ing. HTL/SIA, EUR ING BIENZ, KUMMER & PARTNER LTD, Langägertenstrasse 6 CH-8125 ZOLLIKERBERG, SWITZERLAND Tel: int 41 1 391 27 37 FAX:
PREPARED FOR: U.S. Army Medical Research and Materiel CommandFort Detrick, Maryland 21702 5012
 AD Award Number: W81XWH 07 1 0542 TITLE: Is Nuclear Structure Altered in Breast Cancer Cells? PRINCIPAL INVESTIGATOR: Han Htun, Ph.D. CONTRACTING ORGANIZATION: University of California Los Angeles, CA
AD Award Number: W81XWH 07 1 0542 TITLE: Is Nuclear Structure Altered in Breast Cancer Cells? PRINCIPAL INVESTIGATOR: Han Htun, Ph.D. CONTRACTING ORGANIZATION: University of California Los Angeles, CA
Hardware-in-the-Loop Testing of Wireless Sensor Networks
 TechNotes ITEA Journal 2009; 30: 333 338 Copyright 2009 by the International Test and Evaluation Association Hardware-in-the-Loop Testing of Wireless Sensor Networks Kenneth G. LeSueur Subsystem Test and
TechNotes ITEA Journal 2009; 30: 333 338 Copyright 2009 by the International Test and Evaluation Association Hardware-in-the-Loop Testing of Wireless Sensor Networks Kenneth G. LeSueur Subsystem Test and
Microstructural Evaluation of KM4 and SR3 Samples Subjected to Various Heat Treatments
 NASA/TM 2004-213140 Microstructural Evaluation of KM4 and SR3 Samples Subjected to Various Heat Treatments David Ellis and Timothy Gabb Glenn Research Center, Cleveland, Ohio Anita Garg University of Toledo,
NASA/TM 2004-213140 Microstructural Evaluation of KM4 and SR3 Samples Subjected to Various Heat Treatments David Ellis and Timothy Gabb Glenn Research Center, Cleveland, Ohio Anita Garg University of Toledo,
SPARNET Spartan Data Network for Real-Time Physiological Status Monitoring
 SPARNET Spartan Data Network for Real-Time Physiological Status Monitoring Reed W. Hoyt, Ph.D. Biophysics and Biomedical Modeling Division US Army Research Institute of Environmental Medicine (USARIEM)
SPARNET Spartan Data Network for Real-Time Physiological Status Monitoring Reed W. Hoyt, Ph.D. Biophysics and Biomedical Modeling Division US Army Research Institute of Environmental Medicine (USARIEM)
Testing the Revised Moving Target Tutor
 COLLEGE OF INFORMATION SCIENCES AND TECHNOLOGY THE PENNSYLVANIA STATE UNIVERSITY Testing the Revised Moving Target Tutor (evaluation of D2P/MTT 11/27/2012) Kuo-Chuan (Martin) Yeh, Frank E. Ritter, and
COLLEGE OF INFORMATION SCIENCES AND TECHNOLOGY THE PENNSYLVANIA STATE UNIVERSITY Testing the Revised Moving Target Tutor (evaluation of D2P/MTT 11/27/2012) Kuo-Chuan (Martin) Yeh, Frank E. Ritter, and
Secure Autonomous Automated Scheduling (SAAS) Phase 1 Final Report
 Phase 1 Final Report") NASA/CR 2010-216097 Secure Autonomous Automated Scheduling (SAAS) Phase 1 Final Report Rev 1.1 Jon G. Walke, Larry Dikeman, Stephen P. Sage, and Eric M. Miller General Dynamics Advanced Information Systems,
NASA/CR 2010-216097 Secure Autonomous Automated Scheduling (SAAS) Phase 1 Final Report Rev 1.1 Jon G. Walke, Larry Dikeman, Stephen P. Sage, and Eric M. Miller General Dynamics Advanced Information Systems,
HEC-DSS Add-In Excel Data Exchange for Excel 2007-2010
 HEC-DSS Add-In Excel Data Exchange for Excel 2007-2010 User's Manual Version 3.2.1 January 2010 Approved for Public Release. Distribution Unlimited. CPD-79b REPORT DOCUMENTATION PAGE Form Approved OMB
HEC-DSS Add-In Excel Data Exchange for Excel 2007-2010 User's Manual Version 3.2.1 January 2010 Approved for Public Release. Distribution Unlimited. CPD-79b REPORT DOCUMENTATION PAGE Form Approved OMB
«sorm. Use of Rapid Application Development Techniques. Logistics Management Institute. Designing the Staff Resource Tracking Tool
 Logistics Management Institute Use of Rapid Application Development Techniques Designing the Staff Resource Tracking Tool IR715T1 September 1997 John B. Harris Frank L. Eichora David L. Goodwin Joel L.
Logistics Management Institute Use of Rapid Application Development Techniques Designing the Staff Resource Tracking Tool IR715T1 September 1997 John B. Harris Frank L. Eichora David L. Goodwin Joel L.
Browsing for information on the web and in the file system
 Browsing for information on the web and in the file system Ethan Seifert, Simone Stumpf, Jonathan Herlocker EECS, Oregon State University Corvallis, OR {seiferet, stumpf, herlock}@eecs.oregonstate.edu
Browsing for information on the web and in the file system Ethan Seifert, Simone Stumpf, Jonathan Herlocker EECS, Oregon State University Corvallis, OR {seiferet, stumpf, herlock}@eecs.oregonstate.edu
KEEP THIS COPY FOR REPRODUCTION PURPOSES. I ~~~~~Final Report
 MASTER COPY KEEP THIS COPY FOR REPRODUCTION PURPOSES 1 Form Approved REPORT DOCUMENTATION PAGE I OMS No. 0704-0188 Public reoorting burden for this collection of information is estimated to average I hour
MASTER COPY KEEP THIS COPY FOR REPRODUCTION PURPOSES 1 Form Approved REPORT DOCUMENTATION PAGE I OMS No. 0704-0188 Public reoorting burden for this collection of information is estimated to average I hour
Metamaterials and Transformation Optics
 AFRL-AFOSR-UK-TR-2011-0021 Metamaterials and Transformation Optics John Pendry Imperial College London Physics Department South Kensington Campus Exhibition Road London, United Kingdom SW7 2AZ EOARD GRANT
AFRL-AFOSR-UK-TR-2011-0021 Metamaterials and Transformation Optics John Pendry Imperial College London Physics Department South Kensington Campus Exhibition Road London, United Kingdom SW7 2AZ EOARD GRANT
By Kent Hughes Butts and Arthur L. Bradshaw, Jr. Army Recognizes Importance of Variables Affecting Regional Stability
 CSL C E N T E R f o r S T R AT E G I C L E A D E R S H I P Issue Paper Center for Strategic Leadership, U.S. Army War College August 2007 Volume 8-07 Military Education Workshop Addresses Threats to Stability
CSL C E N T E R f o r S T R AT E G I C L E A D E R S H I P Issue Paper Center for Strategic Leadership, U.S. Army War College August 2007 Volume 8-07 Military Education Workshop Addresses Threats to Stability
MINDS: A NEW APPROACH TO THE INFORMATION SECURITY PROCESS
 MINDS: A NEW APPROACH TO THE INFORMATION SECURITY PROCESS E. E. Eilertson*, L. Ertoz, and V. Kumar Army High Performance Computing Research Center Minneapolis, MN 55414 K. S. Long U.S. Army Research Laboratory
MINDS: A NEW APPROACH TO THE INFORMATION SECURITY PROCESS E. E. Eilertson*, L. Ertoz, and V. Kumar Army High Performance Computing Research Center Minneapolis, MN 55414 K. S. Long U.S. Army Research Laboratory
bñåéêéí=ñêçã=íüé== mêçåééçáåöë= çñ=íüé= qüáêç=^ååì~ä=^åèìáëáíáçå= oéëé~êåü=póãéçëáìã=
 NPS-LM-06-063 bñåéêéíñêçãíüé mêçåééçáåöë çñíüé qüáêç^ååì~ä^åèìáëáíáçå oéëé~êåüpóãéçëáìã INVESTIGATING THE DEPARTMENT OF DEFENSE S IMPLEMENTATION OF PASSIVE RADIO FREQUENCY IDENTIFICAION (RFID) Published:
NPS-LM-06-063 bñåéêéíñêçãíüé mêçåééçáåöë çñíüé qüáêç^ååì~ä^åèìáëáíáçå oéëé~êåüpóãéçëáìã INVESTIGATING THE DEPARTMENT OF DEFENSE S IMPLEMENTATION OF PASSIVE RADIO FREQUENCY IDENTIFICAION (RFID) Published:
4. TITLE AND SUBTITLE 5a. CONTRACT NUMBER FA8720-05-C-0002. 6. AUTHOR(S) 5d. PROJECT NUMBER
 5d. PROJECT NUMBER") REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
THE NATIONAL SHIPBUILDING RESEARCH PROGRAM
 SHIP PRODUCTION COMMITTEE FACILITIES AND ENVIRONMENTAL EFFECTS SURFACE PREPARATION AND COATINGS DESIGN/PRODUCTION INTEGRATION HUMAN RESOURCE INNOVATION MARINE INDUSTRY STANDARDS WELDING INDUSTRIAL ENGINEERING
SHIP PRODUCTION COMMITTEE FACILITIES AND ENVIRONMENTAL EFFECTS SURFACE PREPARATION AND COATINGS DESIGN/PRODUCTION INTEGRATION HUMAN RESOURCE INNOVATION MARINE INDUSTRY STANDARDS WELDING INDUSTRIAL ENGINEERING
PREPARED FOR: U.S. Army Medical Research and Materiel Command Fort Detrick, Maryland 21702-5012
 AD Award Number: W81XWH-10-1-0957 TITLE: PRINCIPAL INVESTIGATOR: Andrea L. Behrman, Ph.D., P.T. CONTRACTING ORGANIZATION: University of Florida Gainesville, FL 32611 REPORT DATE: October 2011 TYPE OF REPORT:
AD Award Number: W81XWH-10-1-0957 TITLE: PRINCIPAL INVESTIGATOR: Andrea L. Behrman, Ph.D., P.T. CONTRACTING ORGANIZATION: University of Florida Gainesville, FL 32611 REPORT DATE: October 2011 TYPE OF REPORT:
CONTRACTING ORGANIZATION: Stevens Institute of Technology Hoboken, NJ 07030
 AD Award Number: W81XWH-05-1-0218 TITLE: Test Bed Development for Detection and Diagnosis of Prostate Cancer via Internet and Wireless Communication Networks PRINCIPAL INVESTIGATOR: Yu-Dong Yao, Ph.D.
AD Award Number: W81XWH-05-1-0218 TITLE: Test Bed Development for Detection and Diagnosis of Prostate Cancer via Internet and Wireless Communication Networks PRINCIPAL INVESTIGATOR: Yu-Dong Yao, Ph.D.
Regional Field Verification Operational Results from Four Small Wind Turbines in the Pacific Northwest
 National Renewable Energy Laboratory Innovation for Our Energy Future A national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Regional Field Verification Operational
National Renewable Energy Laboratory Innovation for Our Energy Future A national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Regional Field Verification Operational
GAO ELECTRONIC HEALTH RECORDS. DOD and VA Should Remove Barriers and Improve Efforts to Meet Their Common System Needs
 GAO United States Government Accountability Office Report to February 2011 ELECTRONIC HEALTH RECORDS DOD and VA Should Remove Barriers and Improve Efforts to Meet Their Common System Needs Report Documentation
GAO United States Government Accountability Office Report to February 2011 ELECTRONIC HEALTH RECORDS DOD and VA Should Remove Barriers and Improve Efforts to Meet Their Common System Needs Report Documentation
NAVAL POSTGRADUATE SCHOOL THESIS
 NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA THESIS SECURITY INFORMATION AND EVENT MANAGEMENT TOOLS AND INSIDER THREAT DETECTION by Christopher J. Callahan September 2013 Thesis Advisor: Co-Advisor:
NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA THESIS SECURITY INFORMATION AND EVENT MANAGEMENT TOOLS AND INSIDER THREAT DETECTION by Christopher J. Callahan September 2013 Thesis Advisor: Co-Advisor:
Computer Aided Prototyping System (CAPS) for Heterogeneous Systems Development and Integration *
 for Heterogeneous Systems Development and Integration *") Computer Aided Prototyping System (CAPS) for Heterogeneous Systems Development and Integration * Luqi, V. Berzins, M. Shing, N. Nada and C. Eagle Computer Science Department Naval Postgraduate School Monterey,
Computer Aided Prototyping System (CAPS) for Heterogeneous Systems Development and Integration * Luqi, V. Berzins, M. Shing, N. Nada and C. Eagle Computer Science Department Naval Postgraduate School Monterey,
Real-Time Task Scheduling for Energy-Aware Embedded Systems 1
 Real-Time Task Scheduling for Energy-Aware Embedded Systems 1 Vishnu Swaminathan and Krishnendu Chakrabarty Dept. of Electrical & Computer Engineering Duke University Durham, NC 27708 fvishnus,krishg@ee.duke.edu
Real-Time Task Scheduling for Energy-Aware Embedded Systems 1 Vishnu Swaminathan and Krishnendu Chakrabarty Dept. of Electrical & Computer Engineering Duke University Durham, NC 27708 fvishnus,krishg@ee.duke.edu
A New Empirical Relationship between Thrust Coefficient and Induction Factor for the Turbulent Windmill State
 National Renewable Energy Laboratory Innovation for Our Energy Future A national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy A New Empirical Relationship
National Renewable Energy Laboratory Innovation for Our Energy Future A national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy A New Empirical Relationship
Small PV Systems Performance Evaluation at NREL's Outdoor Test Facility Using the PVUSA Power Rating Method
 National Renewable Energy Laboratory Innovation for Our Energy Future A national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Small PV Systems Performance
National Renewable Energy Laboratory Innovation for Our Energy Future A national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Small PV Systems Performance
Elastomer Compatibility Testing of Renewable Diesel Fuels
 National Renewable Energy Laboratory Innovation for Our Energy Future A national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Elastomer Compatibility Testing
National Renewable Energy Laboratory Innovation for Our Energy Future A national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Elastomer Compatibility Testing
CONTRACTING ORGANIZATION: University of Alabama at Birmingham Birmingham, AL 35294
 AD Award Number: W81XWH-08-1-0030 TITLE: Regulation of Prostate Cancer Bone Metastasis by DKK1 PRINCIPAL INVESTIGATOR: Gregory A. Clines, M.D., Ph.D. CONTRACTING ORGANIZATION: University of Alabama at
AD Award Number: W81XWH-08-1-0030 TITLE: Regulation of Prostate Cancer Bone Metastasis by DKK1 PRINCIPAL INVESTIGATOR: Gregory A. Clines, M.D., Ph.D. CONTRACTING ORGANIZATION: University of Alabama at