Sistemi per il Governo dei Robot (mod B): Organizzazione. 48 ore, 6 CFU alberto.finzi@unina.it. Lezioni: - Lunedì 14:00-16:00 (C11???
|
|
|
- Oswin Collins
- 8 years ago
- Views:
Transcription
1 Sistemi per il Governo dei Robot (mod B): Organizzazione 48 ore, 6 CFU alberto.finzi@unina.it web-page: people.na.infn.it/%7efinzi/didattica Lezioni: - Lunedì 14:00-16:00 (C11???) - Mercoledì 11:00-13:00 13 (Lab)

2 Obiettivi del Corso Completa il corso di Sistemi per il Governo di Robot (Modulo A): Robotica Probabilistica: metodi statistici in robotica Robotica Mobile: navigazione, localizzazione, mapping, esplorazione Architetture Ibride: esecuzione, monitoraggio, pianificazione

3 Autonomous Robots Coherent, flexible, adaptive, goal-oriented oriented behavior Unstructured environments Unstructured environments Field Robotics, Service Robotics (Mobile Robotics) Navigation: Localization, mapping, exploration Probabilistic Robotics: : statistical methods in robotics From navigation to deliberation: - SLAM, Exploration, DT Planning Argomenti Architectures for autonomy: High-level/Low level control loops (sense/plan/exec) Hierarchical, Reactive, Hybrid, Cognitive Architectures
 Hierarchical, Reactive, Hybrid, Cognitive")
4 Materiale Didattico Lucidi, dispense e articoli sul sito del corso Probabilistic Robotics, Sebastian Thrun, Wolfram Burgard and Dieter Fox, The MIT Press, 2004

5 Materiale didattico Slides, papers, on-line references Murphy R.R. - Introduction to AI robotics - MIT Press Arkin R.C. - Behavior-based robotics - MIT Press 1998 Probabilistic Robotics, Sebastian Thrun, Wolfram Burgard and Dieter Fox, The MIT Press, 2004

6 Modalità di accertamento del profitto: Modalità di accertamento del profitto: Progetto Presentazione e Discussione Esami

7 Autonomous: Greek: Automaton (auto + matos) auto: self matos: thinking, animated, willing Autonomous Robots Robots: Czech: Robota (work) and robotnik (worker) self-willed but task-oriented
 self-willed but")
8 Autonomous Robots Autonomous robots: robots that can perform desired tasks in unstructured environments without continuous human guidance. Industrial robots (fixed-base) are fast, accurate, ripetitive but limited in work space; To operate in the real/external world robots must be able to cope with: large, unstructured, dynamic, uncertain, partially observable environments

9 Autonomous Robots

10 Robotics Applications Industrial Robotics: Factory, mining Field Robotics: Umnanned Vehicles: UAV, UTV, Planetary Rovers Service Robotics: Personal services Entertainment t t Social Robotics

11 Robotics Applications: robots in the real world structured, controlled Industrial Unstructured, teleop., autonomous Field unstructured, proactive, interactive Service Manufacturing Surgery Aerospace Underwater Rescue autonomy Home Entertainment Health care 11

12 Service Robotics Robotica umanoide UAV UTV (mobile robotics)

13 Classic Robotics (AI '70): Model-based (representation = world), symbolic, no sensing, only reasoning Reactive Robotics (Ethology '80): No models (world is the model), reactive: sense-act (insects-like) Hybrid Architectures (Agents '90): Model-based (rep. abstract, but fine) + reactive (3T architectures) Probabilistic Robotics (Mobile Robotics '90): Robotic Paradigms Approximate/probabilistic models (rep.!= world), actuators Approximate/probabilistic models (rep.! world), actuators not reliable, sensors not accurate; Sensors/Actuators models tight integration.
, actuators Approximate/probabilistic models (rep.")
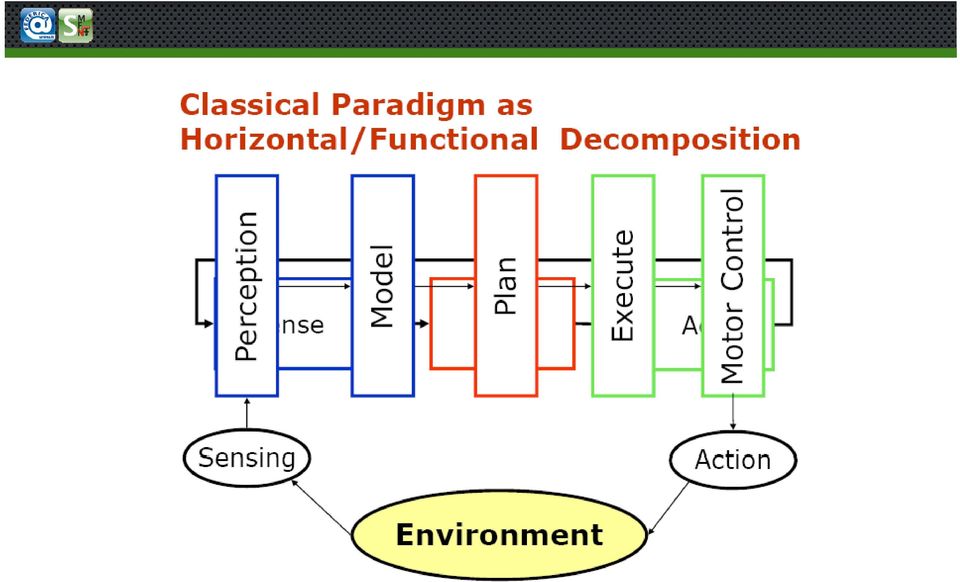
14 Classical Paradigm Hierarchical Architecture Knowledge Representation and formal reasoning Closed World: Complete model of the environment Deterministic, i ti observable bl Functional decomposition of the activities [Shakey 1969] Classical Control Schema

15
16 1970-Shakey the robot Remote controlled by a computer. Reasoning program fed very selective spatial data. Weak edge-based processing of camera and laser range measurements. Plans involving moving from place to place and pushing blocks to achieve a goal.

17

18 Reactive Paradigm Situated: interacting with the env. No Memory, no model: memory and model are the external world (stygmergic) Behavior-based: sense e act coupuled and associated with the behavior (Fixed Action Patterns) Sense-Act Paradigm Subsumption Architecture [Brooks 1986] Potential Fields
 Sense-Act Paradigm Subsumption Architecture")
19

20
21
22
23
24
25 Reactive Paradigm
26 Reactive Paradigm
27 Reactive Paradigm
28 Reactive Paradigm
29 Reactive Paradigm
30 Hybrid Paradigm It combines the two paradigms (3T [Gat 1996, Bonasso et. al 1998]) Model-based planning and reasoning Reactive at the low-level control E.g. ATLANTIS [Gat 1996]: - Control Layer, - Sequencing Layer, - Deliberative e Layer. Sense-Act + Plan
31 Hybrid Paradigm ATLANTIS [Gat 1992] Task Control Architecture [Simmons 1994] 3T [Bonasso 1996] RHINO [Burgard et al 1995] LAAS [Alami 1998] CIRCA [Musliner et al 1993] SSense-Act + Plan
32 3 Layered Architectures Deliberative layer: plan, reasoning, deliberation Esecutive layer: execution monitoring, scheduling, sequencing, dispatching, recovery, synchronization, etc., etc. Functional layer: specialized controllers, o perceptive p systems, sensory-motor oy oo loops, reactive behaviors
33 3T Architecture: ATLANTIS
34 3T Architecture LAAS architecture: Three Layers: 1. Deliberative (temporal planner) 2. Executive (PRS) 3. Functional (GENOME) Rover Control
35 RHINO Architecture Robotic tour guide - Bonn Science museum (1995); MINERVA Atlanta (1998) 3T mobile robot: 1. Functional: Mapping, Localizzation, Obstacle Avoidance 2. Executive: Sequencer, monitor 3. Deliberative: Task Planner (tour planner) RHINO Architetture
36 Xavier Architecture (1995) -Low-level control: high resolution, high frequency h l l l l l -High-level control: low resolution (abstract), low frequency
37 DS1 (Remote Agent) Mission: i testingti new technologies for the New Millennium Program (and observe Borrelly comet) First autonomous spacecraft Planner and smart executive system (RAX: Remote Agent Experiment). Planning, scheduling, adaptive execution, diagnosis, recovery.
38 3T: REX - Remote Agent: - Three Layers: - Mission Manager, Temporal planning and scheduling - Execution Monitoring/Dispatching, Mode Identification (Diagnosis) and Recovery (MIR) - Reflex control, sense (real-time)
39 3T: REX
40 3T Architectures Problems with 3T: Modular architectures but Heterogeneous (different models) Abstraction ti level l == control level: l - HL abstract deliberation (task and mission planning) - LL reaction (implicit model, no flexible) Interaction deliberative-reactive? - Plan-Exec interaction - Replanning - Several exec-monitor-control loops Ad hoc executive system (when too complex, only sequencer and dispatcher)
41 Executive Layer: the key stone
42 Executive Control: RAPs (Firby 1987) Balancing reactive and goal-orientedoriented behaviors
43 RAPs (Firby 1987)
44 Executive Layer: PRS (Ingrand 1990) BDI architecture: 1. Beliefs: DB 2. Desires: Goals 3. Intentions: Goal-oriented procedures
45 Task Control Architecture (Simmons 1994) TAC architecture: Interprocess comm Task decomposition and temporal constraints Resource allocation Execution monitoring Exception Handling Executive orchestrates multiple Executive orchestrates multiple perceptive, reactive, and deliberative processes
46 Task Control Architecture
47 Task Control Architecture
48 Task Control Architecture
49 Test-Action Pair CIRCA (Musliner 1993)
50 CIRCA (Musliner 1993)
51 2T Hybrid Architectures 3T Architectures: HL abstract deliberation (smart), LL execution/reaction (stupid) [Bonasso et al. 1998] 2T Architectures: Execution and deliberation distributed at all control levels [Claraty 2000] Claraty Architecture (from JPL) 3 layers
52 Claraty Architecture (Volpe & Nessans 2000)
53 CASPER (Estlin et al 2000) Continuous Planning and execution in CASPER (JPL)
54 IDEA: Muscettola (2002) Model-based executive control through reactive planning: - Reactive Planning and scheduling (executive layer) - Distributed components interacting with sense-plan-act act cycles Planning and scheling as an executive/reactive engine
55 Cognitive Architectures - Autonomous robot and flexible behavior (Field Robotics) - Interaction, Interpretation, Continous learning (Social Robotics) Robotic Architetture as Cognitive Architectures: -Sensorfusion - Reasoning - Deliberation -Learning - Perception/Recognition iti and Perception/Action - Attention and Executive Control - Sensory-motor coordination (synergies) - Motivations, emotions - Human-robot interaction (development robotics)
56 Architetture Cognitive: Alami (2006)
57 Prime Architetture Cognitive: ACT-R (1993) Plausibilità Cognitiva: Teoria della cognizione e verifica sperimentale Embodied Agent: utilizzata per controllo di robots. Due memorie: proceduarale e associativa Contina scelta della produzione più adatta al contesto t e al goal
58 Prime Architetture Cognitive: SOAR (1987) Plausibilità Cognitiva; Regole di produzione; tutti i task sono goal- oriented Ciclo di selezione e applicazione di operatori; se enpasse nuovo goal
59 Architetture Cognitive: ICARUS (2004) ICARUS è un rule-based system, include memorie per concetti è skills e memorie a breve termine per la percezione. Esecuzione; memoria; percezione
60 Architetture Cognitive: Alami (2006)
61 Architetture Cognitive: Alami (2006)
62 Functional Functionalities Avoidance Mapping Localization Navigation Perception/recognition iti object,situation,place,... Object manipulation Visual perception Human-robot interaction Esempio: GENOME functional Livello layer funzionale in
63 Functional level: Mission MER (2003) Twin Robots (Spirit e Opportunity) on Mars Instruments: 3 cameras (PAN, MI, Nav), 3 spectrometres (TES,MB,APXS), 1 drill. Control: supervision, Autonomous navigation (tested)
64 Functional Level: Mission MER (2003) Local Mapping Semiautonomous Navigazione: stereo camera, 3D mapping, obstacle avoidance, pathplanning, visual odometry Opportunity 141 metri nel sol 82 (more than Sujourner!) Real Data Opportunity Dati reali Opportunity Percorso di Spirit Sim. Ricostruzione Opportunity o Opportunity
65 Mars Mission Lab (2011) Navigation: path planning horizon 50 m CLARATY architecture: Animation Credit: NASA/JPL-Caltech/CMU
66 Deliberative layer Meccanismi di decisione: Task planning Reactive/Dynamic Planning Path Planning Temporal, dynamic reasoning,etc. Environment models (maps, constraints, cause-effects, effects dynamics, etc.) Robot Models (sensor/actuator) Decision i Models (utility, costs etc.) InteractionModels(HRI) Esempio: Timeline-based Planning
67 Deliberative: Mission MER (2003) Off-line planning 240 researchers (geologists, engineers, biologists, etc.) ask for experiments and observations. Night planning for the next sol No Planning on-bord
68 Executive Layer Between functional and deliberative: Planned activities Sensory-motor coordination Deliberative-reactive coordination Execution monitoring Error detection, diagnosis and recover Replanning Model Model Model SLAM PTU Navigation Execution Monitoring CAMERA 3D
69 Functional, Deliberative and Executive layers are also the architecture of the lectures: Functional layer: Mobile robotics and probabilistic robotics (mapping e localizzation, navigation, exploration, etc.). Bayesian a models, bayesian a filters Executive layer: Execution monitoring and dynamic planning; cognitive control and attentional systems. Temporal models, automata, cognitive models etc. Deliberative layer: Planning and scheduling; planning and execution; decision theoric planning; pa reinforcement e learning. Temporal models, markov models, etc.. Issues
P r oba bi l i sti c R oboti cs. Yrd. Doç. Dr. SIRMA YAVUZ sirma@ce.yildiz.edu.tr Room 130
 P r oba bi l i sti c R oboti cs Yrd. Doç. Dr. SIRMA YAVUZ sirma@ce.yildiz.edu.tr Room 130 Orgazinational Lecture: Thursday 13:00 15:50 Office Hours: Tuesday 13:00-14:00 Thursday 11:00-12:00 Exams: 1 Midterm
P r oba bi l i sti c R oboti cs Yrd. Doç. Dr. SIRMA YAVUZ sirma@ce.yildiz.edu.tr Room 130 Orgazinational Lecture: Thursday 13:00 15:50 Office Hours: Tuesday 13:00-14:00 Thursday 11:00-12:00 Exams: 1 Midterm
Algorithms for Sensor-Based Robotics: Introduction and Background
 Algorithms for Sensor-Based Robotics: Introduction and Background Computer Science 436/636 https://cirl.lcsr.jhu.edu/sensorbasedrobotics/ Greg Hager Simon Leonard With slides borrowed from Zach Dodds and
Algorithms for Sensor-Based Robotics: Introduction and Background Computer Science 436/636 https://cirl.lcsr.jhu.edu/sensorbasedrobotics/ Greg Hager Simon Leonard With slides borrowed from Zach Dodds and
Dynamic Schema Hierarchies for an Autonomous Robot
 Dynamic Schema Hierarchies for an Autonomous Robot José M. Cañas 1 and Vicente Matellán 1 Universidad Rey Juan Carlos, 28933 Móstoles (Spain) {jmplaza,vmo}@gsyc.escet.urjc.es Abstract. This paper proposes
Dynamic Schema Hierarchies for an Autonomous Robot José M. Cañas 1 and Vicente Matellán 1 Universidad Rey Juan Carlos, 28933 Móstoles (Spain) {jmplaza,vmo}@gsyc.escet.urjc.es Abstract. This paper proposes
the Reactive Model-based Programming Language for Robotic Space Explorers
 A Reactive Model-based Programming Language for Robotic Space Explorers Michel Ingham, Robert Ragno, Brian Williams MIT Space Systems Laboratory / Artificial Intelligence Laboratory Cambridge, MA 02139
A Reactive Model-based Programming Language for Robotic Space Explorers Michel Ingham, Robert Ragno, Brian Williams MIT Space Systems Laboratory / Artificial Intelligence Laboratory Cambridge, MA 02139
A Cognitive Approach to Vision for a Mobile Robot
 A Cognitive Approach to Vision for a Mobile Robot D. Paul Benjamin Christopher Funk Pace University, 1 Pace Plaza, New York, New York 10038, 212-346-1012 benjamin@pace.edu Damian Lyons Fordham University,
A Cognitive Approach to Vision for a Mobile Robot D. Paul Benjamin Christopher Funk Pace University, 1 Pace Plaza, New York, New York 10038, 212-346-1012 benjamin@pace.edu Damian Lyons Fordham University,
Robot Navigation. Johannes Maurer, Institute for Software Technology TEDUSAR Summerschool 2014. u www.tugraz.at
 1 Robot Navigation u www.tugraz.at 2 Motivation challenges physical laws e.g. inertia, acceleration uncertainty e.g. maps, observations geometric constraints e.g. shape of a robot dynamic environment e.g.
1 Robot Navigation u www.tugraz.at 2 Motivation challenges physical laws e.g. inertia, acceleration uncertainty e.g. maps, observations geometric constraints e.g. shape of a robot dynamic environment e.g.
Virtual Reality Visualization of Distributed Tele-Experiments
 To appear in Proc. of 1998 IEEE Industrial Electronics Conference (IECON98), Aachen Germany Virtual Reality Visualization of Distributed Tele-Experiments Armin Hopp Dirk Schulz Wolfram Burgard Armin B.
To appear in Proc. of 1998 IEEE Industrial Electronics Conference (IECON98), Aachen Germany Virtual Reality Visualization of Distributed Tele-Experiments Armin Hopp Dirk Schulz Wolfram Burgard Armin B.
Implementation of hybrid software architecture for Artificial Intelligence System
 IJCSNS International Journal of Computer Science and Network Security, VOL.7 No.1, January 2007 35 Implementation of hybrid software architecture for Artificial Intelligence System B.Vinayagasundaram and
IJCSNS International Journal of Computer Science and Network Security, VOL.7 No.1, January 2007 35 Implementation of hybrid software architecture for Artificial Intelligence System B.Vinayagasundaram and
Graduate Co-op Students Information Manual. Department of Computer Science. Faculty of Science. University of Regina
 Graduate Co-op Students Information Manual Department of Computer Science Faculty of Science University of Regina 2014 1 Table of Contents 1. Department Description..3 2. Program Requirements and Procedures
Graduate Co-op Students Information Manual Department of Computer Science Faculty of Science University of Regina 2014 1 Table of Contents 1. Department Description..3 2. Program Requirements and Procedures
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Online Risk Assessment for Safe Autonomous Mobile Robots - A Perspective
 Online Risk Assessment for Safe Autonomous Mobile Robots - A Perspective H. Voos, P. Ertle Mobile Robotics Lab, University of Applied Sciences Ravensburg-Weingarten, Germany, (e-mail: voos@hs-weingarten.de).
Online Risk Assessment for Safe Autonomous Mobile Robots - A Perspective H. Voos, P. Ertle Mobile Robotics Lab, University of Applied Sciences Ravensburg-Weingarten, Germany, (e-mail: voos@hs-weingarten.de).
FUNCTIONAL MODULES FOR INTERMIXED PLANNING AND EXECUTION OF AN OBSERVATION MISSION
 18 th Bristol UAV Systems Conference FUNCTIONAL MODULES FOR INTERMIXED PLANNING AND EXECUTION OF AN OBSERVATION MISSION Elodie CHANTHERY Dr. Magali BARBIER Department of Systems Control and Flight Dynamics
18 th Bristol UAV Systems Conference FUNCTIONAL MODULES FOR INTERMIXED PLANNING AND EXECUTION OF AN OBSERVATION MISSION Elodie CHANTHERY Dr. Magali BARBIER Department of Systems Control and Flight Dynamics
Specifying Failure and Progress Conditions in a Behavior-Based Robot Programming System
 Specifying Failure and Progress Conditions in a Behavior-Based Robot Programming System (Extended Abstract) Froduald Kabanza and Khaled Ben Lamine University of Sherbrooke Sherbrooke, Quebec, J1K 2R1 Canada
Specifying Failure and Progress Conditions in a Behavior-Based Robot Programming System (Extended Abstract) Froduald Kabanza and Khaled Ben Lamine University of Sherbrooke Sherbrooke, Quebec, J1K 2R1 Canada
Percorso Mcsa Managing and Mainting Windows 8
 Percorso Mcsa Managing and Mainting Windows 8 Descrizione In questo corso, gli studenti imparano a progettare l'installazione, la configurazione e la manutenzione di Windows 8. Due caratteristiche uniche
Percorso Mcsa Managing and Mainting Windows 8 Descrizione In questo corso, gli studenti imparano a progettare l'installazione, la configurazione e la manutenzione di Windows 8. Due caratteristiche uniche
Artificial Intelligence and Robotics @ Politecnico di Milano. Presented by Matteo Matteucci
 1 Artificial Intelligence and Robotics @ Politecnico di Milano Presented by Matteo Matteucci What is Artificial Intelligence «The field of theory & development of computer systems able to perform tasks
1 Artificial Intelligence and Robotics @ Politecnico di Milano Presented by Matteo Matteucci What is Artificial Intelligence «The field of theory & development of computer systems able to perform tasks
Robotic Home Assistant Care-O-bot: Past Present Future
 Robotic Home Assistant Care-O-bot: Past Present Future M. Hans, B. Graf, R.D. Schraft Fraunhofer Institute for Manufacturing Engineering and Automation (IPA) Nobelstr. 12, Stuttgart, Germany E-mail: {hans,
Robotic Home Assistant Care-O-bot: Past Present Future M. Hans, B. Graf, R.D. Schraft Fraunhofer Institute for Manufacturing Engineering and Automation (IPA) Nobelstr. 12, Stuttgart, Germany E-mail: {hans,
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
A STRATEGIC PLANNER FOR ROBOT EXCAVATION' by Humberto Romero-Lois, Research Assistant, Department of Civil Engineering
 A STRATEGIC PLANNER FOR ROBOT EXCAVATION' by Humberto Romero-Lois, Research Assistant, Department of Civil Engineering Chris Hendrickson, Professor, Department of Civil Engineering, and Irving Oppenheim,
A STRATEGIC PLANNER FOR ROBOT EXCAVATION' by Humberto Romero-Lois, Research Assistant, Department of Civil Engineering Chris Hendrickson, Professor, Department of Civil Engineering, and Irving Oppenheim,
Human Interaction with Robots Working in Complex and Hazardous Environments
 Human Interaction with Robots Working in Complex and Hazardous Environments Bill Hamel, Professor & Head IEEE Fellow RAS Vice President for Publication Activities Mechanical, Aerospace, & Biomedical Engineering
Human Interaction with Robots Working in Complex and Hazardous Environments Bill Hamel, Professor & Head IEEE Fellow RAS Vice President for Publication Activities Mechanical, Aerospace, & Biomedical Engineering
Intelligent Flexible Automation
 Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
Corso: Mastering Microsoft Project 2010 Codice PCSNET: MSPJ-11 Cod. Vendor: 50413 Durata: 3
 Corso: Mastering Microsoft Project 2010 Codice PCSNET: MSPJ-11 Cod. Vendor: 50413 Durata: 3 Obiettivi Comprendere la disciplina del project management in quanto si applica all'utilizzo di Project. Apprendere
Corso: Mastering Microsoft Project 2010 Codice PCSNET: MSPJ-11 Cod. Vendor: 50413 Durata: 3 Obiettivi Comprendere la disciplina del project management in quanto si applica all'utilizzo di Project. Apprendere
Robot Control System. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Robot Control System Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Mobile Manipulator The robot depicted below is an exemplar of mobile manipulator, which is able to move on
Robot Control System Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Mobile Manipulator The robot depicted below is an exemplar of mobile manipulator, which is able to move on
PhD Program in Bioengineering and Robotics
 PhD Program in Bioengineering and Robotics Curriculum Robotics and Autonomous Systems Research themes 1. ADVANCED AUTONOMY AND COOPERATION FOR UNMANNED MARINE SYSTEMS... 2 2. BIOLOGICALLY INSPIRED APPROACHES
PhD Program in Bioengineering and Robotics Curriculum Robotics and Autonomous Systems Research themes 1. ADVANCED AUTONOMY AND COOPERATION FOR UNMANNED MARINE SYSTEMS... 2 2. BIOLOGICALLY INSPIRED APPROACHES
Process Mining. Luigi Pontieri Istituto di Calcolo e Reti ad Alte Prestazioni ICAR-CNR Via Bucci 41c, Rende (CS) pontieri@icar.cnr.
 pontieri@icar.cnr.") Process Mining Luigi Pontieri Istituto di Calcolo e Reti ad Alte Prestazioni ICAR-CNR Via Bucci 41c, Rende (CS) pontieri@icar.cnr.it Argomenti Caratteristiche generali delle tecniche di Process Mining
Process Mining Luigi Pontieri Istituto di Calcolo e Reti ad Alte Prestazioni ICAR-CNR Via Bucci 41c, Rende (CS) pontieri@icar.cnr.it Argomenti Caratteristiche generali delle tecniche di Process Mining
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
Autonomous Operations for Small, Low-Cost Missions: SME, EOR (STEDI), DATA, and Pluto Express OUTLINE. Visions for Future, Low-Cost Missions
, DATA, and Pluto Express OUTLINE. Visions for Future, Low-Cost Missions") Autonomous Operations for Small, Low-Cost Missions: SME, EOR (STEDI), DATA, and Pluto Express Introduction Challenges Solutions Technologies Technology Gaps OUTLINE Visions for Future, Low-Cost Missions
Autonomous Operations for Small, Low-Cost Missions: SME, EOR (STEDI), DATA, and Pluto Express Introduction Challenges Solutions Technologies Technology Gaps OUTLINE Visions for Future, Low-Cost Missions
Cognitive Robotics: High-Level Robot Programming Inspired by Cognitive Science
 Cognitive Robotics: High-Level Robot Programming Inspired by Cognitive Science David S. Touretzky Ethan Tira-Thompson Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213-3891 July
Cognitive Robotics: High-Level Robot Programming Inspired by Cognitive Science David S. Touretzky Ethan Tira-Thompson Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213-3891 July
Robotics. Lecture 3: Sensors. See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information.
 Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
PERSONALIZED WEB MAP CUSTOMIZED SERVICE
 CO-436 PERSONALIZED WEB MAP CUSTOMIZED SERVICE CHEN Y.(1), WU Z.(1), YE H.(2) (1) Zhengzhou Institute of Surveying and Mapping, ZHENGZHOU, CHINA ; (2) North China Institute of Water Conservancy and Hydroelectric
CO-436 PERSONALIZED WEB MAP CUSTOMIZED SERVICE CHEN Y.(1), WU Z.(1), YE H.(2) (1) Zhengzhou Institute of Surveying and Mapping, ZHENGZHOU, CHINA ; (2) North China Institute of Water Conservancy and Hydroelectric
0 0-10 5-30 8-39. Rover. ats gotorock getrock gotos. same time compatibility. Rock. withrover 8-39 TIME
 Verication of plan models using UPPAAL Lina Khatib 1, Nicola Muscettola, and Klaus Havelund 2 NASA Ames Research Center, MS 269-2 Moett Field, CA 94035 1 QSS Group, Inc. 2 RECOM Technologies flina,mus,havelundg@ptolemy.arc.nasa.gov
Verication of plan models using UPPAAL Lina Khatib 1, Nicola Muscettola, and Klaus Havelund 2 NASA Ames Research Center, MS 269-2 Moett Field, CA 94035 1 QSS Group, Inc. 2 RECOM Technologies flina,mus,havelundg@ptolemy.arc.nasa.gov
Sensory-motor control scheme based on Kohonen Maps and AVITE model
 Sensory-motor control scheme based on Kohonen Maps and AVITE model Juan L. Pedreño-Molina, Antonio Guerrero-González, Oscar A. Florez-Giraldo, J. Molina-Vilaplana Technical University of Cartagena Department
Sensory-motor control scheme based on Kohonen Maps and AVITE model Juan L. Pedreño-Molina, Antonio Guerrero-González, Oscar A. Florez-Giraldo, J. Molina-Vilaplana Technical University of Cartagena Department
Probabilistic Hybrid Action Models for Predicting Concurrent Percept-driven Robot Behavior
 Journal of Artificial Intelligence Research 24 (2005) 799-849 Submitted 08/04; published 12/05 Probabilistic Hybrid Action Models for Predicting Concurrent Percept-driven Robot Behavior Michael Beetz Department
Journal of Artificial Intelligence Research 24 (2005) 799-849 Submitted 08/04; published 12/05 Probabilistic Hybrid Action Models for Predicting Concurrent Percept-driven Robot Behavior Michael Beetz Department
CS Master Level Courses and Areas COURSE DESCRIPTIONS. CSCI 521 Real-Time Systems. CSCI 522 High Performance Computing
 CS Master Level Courses and Areas The graduate courses offered may change over time, in response to new developments in computer science and the interests of faculty and students; the list of graduate
CS Master Level Courses and Areas The graduate courses offered may change over time, in response to new developments in computer science and the interests of faculty and students; the list of graduate
Dynamic Temporal Planning for Multirobot Systems
 Dynamic Temporal Planning for Multirobot Systems C. Ugur Usug and Sanem Sarıel-Talay {usugc,sariel}@itu.edu.tr Istanbul Technical University Artificial Intelligence and Robotics Laboratory (AIR http://air.cs.itu.edu.tr
Dynamic Temporal Planning for Multirobot Systems C. Ugur Usug and Sanem Sarıel-Talay {usugc,sariel}@itu.edu.tr Istanbul Technical University Artificial Intelligence and Robotics Laboratory (AIR http://air.cs.itu.edu.tr
Master s Program in Information Systems
 The University of Jordan King Abdullah II School for Information Technology Department of Information Systems Master s Program in Information Systems 2006/2007 Study Plan Master Degree in Information Systems
The University of Jordan King Abdullah II School for Information Technology Department of Information Systems Master s Program in Information Systems 2006/2007 Study Plan Master Degree in Information Systems
Pattern. seconda parte. Types of patterns. ...other good guidance... some GRASP. design patterns (software design) Types of software patterns
 Types of software patterns") rel. 1.7 Università di Padova Facoltà di Scienze MM.FF.NN Informatica - anno 2008-09 Corso di Ingegneria del Software Pattern seconda parte Renato Conte - Pattern II- 1/48 - Types of software patterns
rel. 1.7 Università di Padova Facoltà di Scienze MM.FF.NN Informatica - anno 2008-09 Corso di Ingegneria del Software Pattern seconda parte Renato Conte - Pattern II- 1/48 - Types of software patterns
Robotics. Lecture 1: Introduction to Robotics. See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information.
 Robotics Lecture 1: Introduction to Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Lecture
Robotics Lecture 1: Introduction to Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Lecture
A Generic Framework for Robotic Navigation
 A Generic Framework for Robotic Navigation 1355 Chris Urmson Reid Simmons Issa Nesnas Carnegie Mellon University Carnegie Mellon University Jet Propulsion Laboratory 5000 Forbes Avenue 5000 Forbes Avenue
A Generic Framework for Robotic Navigation 1355 Chris Urmson Reid Simmons Issa Nesnas Carnegie Mellon University Carnegie Mellon University Jet Propulsion Laboratory 5000 Forbes Avenue 5000 Forbes Avenue
Proc. IJCAI 09 Workshop on Artificial Intelligence in Space, Pasadena, California, US 17 18 July 2009 (ESA SP-673, September 2009)
") INTELLIGENT AGENTS FOR SCHEDULING SPACE COMMUNICATIONS Pete Bonasso, Debra Schreckenghost TRACLabs, Inc., 1012 Hercules, Houston,. TX 77058 bonasso@traclabs.com, schreck@traclabs.com ABSTRACT The evolving
INTELLIGENT AGENTS FOR SCHEDULING SPACE COMMUNICATIONS Pete Bonasso, Debra Schreckenghost TRACLabs, Inc., 1012 Hercules, Houston,. TX 77058 bonasso@traclabs.com, schreck@traclabs.com ABSTRACT The evolving
Agents: Rationality (2)
") Agents: Intro Agent is entity that perceives and acts Perception occurs via sensors Percept is one unit of sensory input Percept sequence is complete history of agent s percepts In general, agent s actions
Agents: Intro Agent is entity that perceives and acts Perception occurs via sensors Percept is one unit of sensory input Percept sequence is complete history of agent s percepts In general, agent s actions
2013 International Symposium on Green Manufacturing and Applications Honolulu, Hawaii
 Green Robotics, Automation, and Machine Intelligence; a new Engineering Course in Sustainable Design Joseph T. Wunderlich, PhD College, PA, USA 2013 International Symposium on Green Manufacturing and Applications
Green Robotics, Automation, and Machine Intelligence; a new Engineering Course in Sustainable Design Joseph T. Wunderlich, PhD College, PA, USA 2013 International Symposium on Green Manufacturing and Applications
Behaviors and Layers in Spoken Dialogue Systems
 Behaviors and Layers in Spoken Dialogue Systems Pontus Wärnestål Dept. of Computer Science Linköping University ponjo@ida.liu.se Abstract The classical view of artificial intelligence (AI) is tied down
Behaviors and Layers in Spoken Dialogue Systems Pontus Wärnestål Dept. of Computer Science Linköping University ponjo@ida.liu.se Abstract The classical view of artificial intelligence (AI) is tied down
Corso: Supporting and Troubleshooting Windows 10 Codice PCSNET: MW10-3 Cod. Vendor: 10982 Durata: 5
 Corso: Supporting and Troubleshooting Windows 10 Codice PCSNET: MW10-3 Cod. Vendor: 10982 Durata: 5 Obiettivi Al termine del corso i partecipanti saranno in grado di: Descrivere i processi coinvolti nella
Corso: Supporting and Troubleshooting Windows 10 Codice PCSNET: MW10-3 Cod. Vendor: 10982 Durata: 5 Obiettivi Al termine del corso i partecipanti saranno in grado di: Descrivere i processi coinvolti nella
Online Learning for Offroad Robots: Using Spatial Label Propagation to Learn Long Range Traversability
 Online Learning for Offroad Robots: Using Spatial Label Propagation to Learn Long Range Traversability Raia Hadsell1, Pierre Sermanet1,2, Jan Ben2, Ayse Naz Erkan1, Jefferson Han1, Beat Flepp2, Urs Muller2,
Online Learning for Offroad Robots: Using Spatial Label Propagation to Learn Long Range Traversability Raia Hadsell1, Pierre Sermanet1,2, Jan Ben2, Ayse Naz Erkan1, Jefferson Han1, Beat Flepp2, Urs Muller2,
Interactive Tele-Presence in Exhibitions through Web-operated Robots
 Proceedings of ICAR 2003 The 11th International Conference on Advanced Robotics Coimbra, Portugal, June 30 - July 3, 2003 Interactive Tele-Presence in Exhibitions through Web-operated Robots P. Trahanias
Proceedings of ICAR 2003 The 11th International Conference on Advanced Robotics Coimbra, Portugal, June 30 - July 3, 2003 Interactive Tele-Presence in Exhibitions through Web-operated Robots P. Trahanias
Sensor-Based Robot Motion Generation in Unknown, Dynamic and Troublesome Scenarios
 Sensor-Based Robot Motion Generation in Unknown, Dynamic and Troublesome Scenarios Javier Minguez and Luis Montano Instituto de Investigación en Ingeniería de Aragón Departamento de Informática e Ingeniería
Sensor-Based Robot Motion Generation in Unknown, Dynamic and Troublesome Scenarios Javier Minguez and Luis Montano Instituto de Investigación en Ingeniería de Aragón Departamento de Informática e Ingeniería
«Software Open Source come fattore abilitante dei Progetti per le Smart Cities»
 «Software Open Source come fattore abilitante dei Progetti per le Smart Cities» Le esperienze nell Electronic Ticketing, nel Wireless Sensor Networks, nei Telematic Services & Location Based Systems Enrico
«Software Open Source come fattore abilitante dei Progetti per le Smart Cities» Le esperienze nell Electronic Ticketing, nel Wireless Sensor Networks, nei Telematic Services & Location Based Systems Enrico
Online Execution Control Checking for Autonomous Systems
 Online Execution Control Checking for Autonomous Systems Félix Ingrand, Frédéric Py LAAS/CNRS, 7 Avenue du Colonel Roche, F-31077 oulouse Cedex 04, France {felix,fpy}@laas.fr Abstract his paper presents
Online Execution Control Checking for Autonomous Systems Félix Ingrand, Frédéric Py LAAS/CNRS, 7 Avenue du Colonel Roche, F-31077 oulouse Cedex 04, France {felix,fpy}@laas.fr Abstract his paper presents
Separation of Concerns in Component-based Robotics
 Separation of Concerns in Component-based Robotics Davide Brugali Università degli Studi di Bergamo, Italy Robot Control Architectures Typical functions implemented in software Acquiring and interpreting
Separation of Concerns in Component-based Robotics Davide Brugali Università degli Studi di Bergamo, Italy Robot Control Architectures Typical functions implemented in software Acquiring and interpreting
- 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering
 - 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering Fall 2005 1 Chapter 1 Introduction Many definitions have been suggested for what we call a robot. The word may conjure up
- 2.12 Lecture Notes - H. Harry Asada Ford Professor of Mechanical Engineering Fall 2005 1 Chapter 1 Introduction Many definitions have been suggested for what we call a robot. The word may conjure up
What is Artificial Intelligence?
 CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. 1 What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. 1 What is AI? What is
REACTIVE TASK EXECUTION OF A MOBILE ROBOT
 REACTIVE TASK EXECUTION OF A MOBILE ROBOT JUKKA RIEKKI Infotech Oulu OULU 1999 JUKKA RIEKKI REACTIVE TASK EXECUTION OF A MOBILE ROBOT Academic Dissertation to be presented with the assent of the Faculty
REACTIVE TASK EXECUTION OF A MOBILE ROBOT JUKKA RIEKKI Infotech Oulu OULU 1999 JUKKA RIEKKI REACTIVE TASK EXECUTION OF A MOBILE ROBOT Academic Dissertation to be presented with the assent of the Faculty
Organic Fault-Tolerant Control Architecture for Robotic Applications
 Organic Fault-Tolerant Control Architecture for Robotic Applications Werner Brockmann, Erik Maehle University of Lübeck Institute of Computer Engineering Director: Prof. Dr.-Ing. E. Maehle Karl-Erwin Großpietsch
Organic Fault-Tolerant Control Architecture for Robotic Applications Werner Brockmann, Erik Maehle University of Lübeck Institute of Computer Engineering Director: Prof. Dr.-Ing. E. Maehle Karl-Erwin Großpietsch
A Review of Intelligent Agents
 A Review of Intelligent Agents K.Suganya 1 1 Associate Professor, Department of Software Engineering & IT(PG), A.V.C College of Engineering, Mayiladuthurai Email- ksuganya2002@yahoo.com ABSTRACT An intelligent
A Review of Intelligent Agents K.Suganya 1 1 Associate Professor, Department of Software Engineering & IT(PG), A.V.C College of Engineering, Mayiladuthurai Email- ksuganya2002@yahoo.com ABSTRACT An intelligent
RiMONITOR. Monitoring Software. for RIEGL VZ-Line Laser Scanners. Ri Software. visit our website www.riegl.com. Preliminary Data Sheet
 Monitoring Software RiMONITOR for RIEGL VZ-Line Laser Scanners for stand-alone monitoring applications by autonomous operation of all RIEGL VZ-Line Laser Scanners adaptable configuration of data acquisition
Monitoring Software RiMONITOR for RIEGL VZ-Line Laser Scanners for stand-alone monitoring applications by autonomous operation of all RIEGL VZ-Line Laser Scanners adaptable configuration of data acquisition
Integrating Cognitive Models Based on Different Computational Methods
 Integrating Cognitive Models Based on Different Computational Methods Nicholas L. Cassimatis (cassin@rpi.edu) Rensselaer Polytechnic Institute Department of Cognitive Science 110 8 th Street Troy, NY 12180
Integrating Cognitive Models Based on Different Computational Methods Nicholas L. Cassimatis (cassin@rpi.edu) Rensselaer Polytechnic Institute Department of Cognitive Science 110 8 th Street Troy, NY 12180
From: AAAI Technical Report WS-02-02. Compilation copyright 2002, AAAI (www.aaai.org). All rights reserved. PRELIMINARY RESEARCH ACTIVITY PLANNING
. All rights reserved. PRELIMINARY RESEARCH ACTIVITY PLANNING") From: AAAI Technical Report WS-02-02. Compilation copyright 2002, AAAI (www.aaai.org). All rights reserved. A TASK PLANNING, SCHEDULING AND SEQUENCING ORTHOSIS FOR THE COGNITIVELY IMPAIRED Richard Simpson
From: AAAI Technical Report WS-02-02. Compilation copyright 2002, AAAI (www.aaai.org). All rights reserved. A TASK PLANNING, SCHEDULING AND SEQUENCING ORTHOSIS FOR THE COGNITIVELY IMPAIRED Richard Simpson
Aerospace Information Technology Topics for Internships and Bachelor s and Master s Theses
 Aerospace Information Technology s for Internships and Bachelor s and Master s Theses Version Nov. 2014 The Chair of Aerospace Information Technology addresses several research topics in the area of: Avionic
Aerospace Information Technology s for Internships and Bachelor s and Master s Theses Version Nov. 2014 The Chair of Aerospace Information Technology addresses several research topics in the area of: Avionic
Software Verification for Space Applications Part 2. Autonomous Systems. G. Brat USRA/RIACS
 Software Verification for Space Applications Part 2. Autonomous Systems G. Brat USRA/RIACS Main Objectives Implement a sustained and affordable human and robotic program to explore the solar system and
Software Verification for Space Applications Part 2. Autonomous Systems G. Brat USRA/RIACS Main Objectives Implement a sustained and affordable human and robotic program to explore the solar system and
Complex Event Pattern Recognition for Long-Term System Monitoring
 Complex Event Pattern Recognition for Long-Term System Monitoring Will Fitzgerald and R. James Firby I/NET, Inc. will.fitzgerald@nrc-cnrc.gc.ca, firby@inetmi.com Aaron Phillips Wheaton College Aaron.B.Phillips@wheaton.edu
Complex Event Pattern Recognition for Long-Term System Monitoring Will Fitzgerald and R. James Firby I/NET, Inc. will.fitzgerald@nrc-cnrc.gc.ca, firby@inetmi.com Aaron Phillips Wheaton College Aaron.B.Phillips@wheaton.edu
TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA
 2015 School of Information Technology and Electrical Engineering at the University of Queensland TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA Schedule Week Date
2015 School of Information Technology and Electrical Engineering at the University of Queensland TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA Schedule Week Date
Information Systems at Politecnico di Milano
 1 Information Systems at Politecnico di Milano Outline Research in Information Systems Studying Information Systems Outline Research in Information Systems Studying Information Systems 4 Research Themes
1 Information Systems at Politecnico di Milano Outline Research in Information Systems Studying Information Systems Outline Research in Information Systems Studying Information Systems 4 Research Themes
Entwicklung und Testen von Robotischen Anwendungen mit MATLAB und Simulink Maximilian Apfelbeck, MathWorks
 Entwicklung und Testen von Robotischen Anwendungen mit MATLAB und Simulink Maximilian Apfelbeck, MathWorks 2015 The MathWorks, Inc. 1 Robot Teleoperation IMU IMU V, W Control Device ROS-Node Turtlebot
Entwicklung und Testen von Robotischen Anwendungen mit MATLAB und Simulink Maximilian Apfelbeck, MathWorks 2015 The MathWorks, Inc. 1 Robot Teleoperation IMU IMU V, W Control Device ROS-Node Turtlebot
Code Reusability Tools for Programming Mobile Robots
 Code Reusability Tools for Programming Mobile Robots Carle Côté, Dominic Létourneau, François Michaud, Jean-Marc Valin, Yannick Brosseau, Clément Raïevsky, Mathieu Lemay, Victor Tran LABORIUS Department
Code Reusability Tools for Programming Mobile Robots Carle Côté, Dominic Létourneau, François Michaud, Jean-Marc Valin, Yannick Brosseau, Clément Raïevsky, Mathieu Lemay, Victor Tran LABORIUS Department
Designing Behavior-Based Systems
 Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
UAS Perspective and Research Initiatives in Alenia Aeronautica
 UAS Perspective and Research Initiatives in Alenia Aeronautica Il materiale contenuto in questa presentazione (Materiale) è di proprietà di Alenia Aeronautica S.p.A. (Alenia). È vietato qualsiasi utilizzo
UAS Perspective and Research Initiatives in Alenia Aeronautica Il materiale contenuto in questa presentazione (Materiale) è di proprietà di Alenia Aeronautica S.p.A. (Alenia). È vietato qualsiasi utilizzo
Distributed Operations among Human-Agent Teams for Testing Crew Water Recovery Systems
 Distributed Operations among Human-Agent Teams for Testing Crew Water Recovery Systems D. Schreckenghost, C. Martin, P. Bonasso, M. B. Hudson, T. Milam, and C. Thronesbery NASA Johnson Space Center, 2101
Distributed Operations among Human-Agent Teams for Testing Crew Water Recovery Systems D. Schreckenghost, C. Martin, P. Bonasso, M. B. Hudson, T. Milam, and C. Thronesbery NASA Johnson Space Center, 2101
DEOS. Deutsche Orbitale Servicing Mission. The In-flight Technology Demonstration of Germany s Robotics Approach to Service Satellites
 DEOS Deutsche Orbitale Servicing Mission The In-flight Technology Demonstration of Germany s Robotics Approach to Service Satellites B. Sommer, K. Landzettel, T. Wolf, D. Reintsema, German Aerospace Center
DEOS Deutsche Orbitale Servicing Mission The In-flight Technology Demonstration of Germany s Robotics Approach to Service Satellites B. Sommer, K. Landzettel, T. Wolf, D. Reintsema, German Aerospace Center
Taming the Internet of Things: The Lord of the Things
 Taming the Internet of Things: The Lord of the Things Kirk Borne @KirkDBorne School of Physics, Astronomy, & Computational Sciences College of Science, George Mason University, Fairfax, VA Taming the Internet
Taming the Internet of Things: The Lord of the Things Kirk Borne @KirkDBorne School of Physics, Astronomy, & Computational Sciences College of Science, George Mason University, Fairfax, VA Taming the Internet
Bayesian networks - Time-series models - Apache Spark & Scala
 Bayesian networks - Time-series models - Apache Spark & Scala Dr John Sandiford, CTO Bayes Server Data Science London Meetup - November 2014 1 Contents Introduction Bayesian networks Latent variables Anomaly
Bayesian networks - Time-series models - Apache Spark & Scala Dr John Sandiford, CTO Bayes Server Data Science London Meetup - November 2014 1 Contents Introduction Bayesian networks Latent variables Anomaly
Task Management under Change and Uncertainty
 Task Management under Change and Uncertainty Constraint Solving Experience with the CALO Project Pauline M. Berry, Karen Myers, Tomás E. Uribe, and Neil Yorke-Smith Artificial Intelligence Center, SRI
Task Management under Change and Uncertainty Constraint Solving Experience with the CALO Project Pauline M. Berry, Karen Myers, Tomás E. Uribe, and Neil Yorke-Smith Artificial Intelligence Center, SRI
Network Robot Systems
 Network Robot Systems Alberto Sanfeliu 1, Norihiro Hagita 2 and Alessandro Saffiotti 3 Guest Editors of the Special Issue on NRS 1 Institut de Robòtica I Informàtica Industrial (UPC-CSIC), Universitat
Network Robot Systems Alberto Sanfeliu 1, Norihiro Hagita 2 and Alessandro Saffiotti 3 Guest Editors of the Special Issue on NRS 1 Institut de Robòtica I Informàtica Industrial (UPC-CSIC), Universitat
AIBO as an Intelligent Robot Watchdog
 Master Thesis report AIBO as an Intelligent Robot Watchdog Unknown human INTRUDER DETECTED!! ALARM! Human... Bou Tsing Hau Delft, December 2006 Man-Machine Interaction Group Faculty of Electrical Engineering,
Master Thesis report AIBO as an Intelligent Robot Watchdog Unknown human INTRUDER DETECTED!! ALARM! Human... Bou Tsing Hau Delft, December 2006 Man-Machine Interaction Group Faculty of Electrical Engineering,
Sharing and Trading in a Human-Robot System
 Sharing and Trading in a Human-Robot System Kai Wei Ong, Gerald Seet & Siang Kok Sim 1. Introduction Open Access Database www.i-techonline.com With the functions of physical robots now extended beyond
Sharing and Trading in a Human-Robot System Kai Wei Ong, Gerald Seet & Siang Kok Sim 1. Introduction Open Access Database www.i-techonline.com With the functions of physical robots now extended beyond
School of Computer Science
 School of Computer Science Computer Science - Honours Level - 2014/15 October 2014 General degree students wishing to enter 3000- level modules and non- graduating students wishing to enter 3000- level
School of Computer Science Computer Science - Honours Level - 2014/15 October 2014 General degree students wishing to enter 3000- level modules and non- graduating students wishing to enter 3000- level
Applicazione di tecniche di controllo predittivo multivariabile ad impianti di produzione a Ciclo Combinato
 MPC of Combined Cycle Power Plants Torna al programma Applicazione di tecniche di controllo predittivo multivariabile ad impianti di produzione a Ciclo Combinato C. Aurora, P. Colombo, F. Pretolani - CESI
MPC of Combined Cycle Power Plants Torna al programma Applicazione di tecniche di controllo predittivo multivariabile ad impianti di produzione a Ciclo Combinato C. Aurora, P. Colombo, F. Pretolani - CESI
The Intelligent Data Network: Proposal for Engineering the Next Generation of Distributed Data Modeling, Analysis and Prediction
 Making Sense of your Data The Intelligent Data Network: Proposal for Engineering the Next Generation of Distributed Data Modeling, Analysis and Prediction David L. Brock The Data Center, Massachusetts
Making Sense of your Data The Intelligent Data Network: Proposal for Engineering the Next Generation of Distributed Data Modeling, Analysis and Prediction David L. Brock The Data Center, Massachusetts
The Planning and Execution Assistant and Trainer (PEAT) The challenge of impaired executive functions
 The challenge of impaired executive functions") The Journal of Head Trauma Rehabilitation, April 1997 The Planning and Execution Assistant and Trainer (PEAT) Richard Levinson, Attention Control Systems, Inc. Introduction Meet PEAT, the Planning and
The Journal of Head Trauma Rehabilitation, April 1997 The Planning and Execution Assistant and Trainer (PEAT) Richard Levinson, Attention Control Systems, Inc. Introduction Meet PEAT, the Planning and
Visual Sensing and Analytics for Construction and Infrastructure Management
 Visual Sensing and Analytics for Construction and Infrastructure Management Academic Committee Annual Conference Speaker Moderator: Burcu Akinci, Carnegie Mellon University 2015 CII Annual Conference August
Visual Sensing and Analytics for Construction and Infrastructure Management Academic Committee Annual Conference Speaker Moderator: Burcu Akinci, Carnegie Mellon University 2015 CII Annual Conference August
An Integrated Interface to Design Driving Simulation Scenarios
 An Integrated Interface to Design Driving Simulation Scenarios Salvador Bayarri, Marcos Fernandez, Ignacio Pareja and Inmaculada Coma Instituto Universitario de Trafico y Seguridad Vial (INTRAS). Instituto
An Integrated Interface to Design Driving Simulation Scenarios Salvador Bayarri, Marcos Fernandez, Ignacio Pareja and Inmaculada Coma Instituto Universitario de Trafico y Seguridad Vial (INTRAS). Instituto
MCSE SERVER INFRASTRUCTURE PERCORSO COMPLETO
 MCSE SERVER INFRASTRUCTURE PERCORSO COMPLETO Descrizione Il corso è destinato ai professionisti dell'information Technology (IT) responsabili della pianificazione, progettazione e implementazione di un
MCSE SERVER INFRASTRUCTURE PERCORSO COMPLETO Descrizione Il corso è destinato ai professionisti dell'information Technology (IT) responsabili della pianificazione, progettazione e implementazione di un
Distributed Database for Environmental Data Integration
 Distributed Database for Environmental Data Integration A. Amato', V. Di Lecce2, and V. Piuri 3 II Engineering Faculty of Politecnico di Bari - Italy 2 DIASS, Politecnico di Bari, Italy 3Dept Information
Distributed Database for Environmental Data Integration A. Amato', V. Di Lecce2, and V. Piuri 3 II Engineering Faculty of Politecnico di Bari - Italy 2 DIASS, Politecnico di Bari, Italy 3Dept Information
Design of Intelligent Robotics. René van de Molengraft December, 6th, 2010
 Design of Intelligent Robotics René van de Molengraft December, 6th, 2010 Theme Health: Care and Cure 11-12-2009 PAGE 2 Mission Help elderly people to stay in their homes Improve quality of surgery for
Design of Intelligent Robotics René van de Molengraft December, 6th, 2010 Theme Health: Care and Cure 11-12-2009 PAGE 2 Mission Help elderly people to stay in their homes Improve quality of surgery for
A Framework for Reactive Intelligence through Agile Component-Based Behaviors
 A Framework for Reactive Intelligence through Agile Component-Based Behaviors submitted by Andy Kwong for the degree of MSc in Computer Science of the University of Bath September 2003 Abstract This dissertation
A Framework for Reactive Intelligence through Agile Component-Based Behaviors submitted by Andy Kwong for the degree of MSc in Computer Science of the University of Bath September 2003 Abstract This dissertation
Autonomy for SOHO Ground Operations
 From: FLAIRS-01 Proceedings. Copyright 2001, AAAI (www.aaai.org). All rights reserved. Autonomy for SOHO Ground Operations Walt Truszkowski, NASA Goddard Space Flight Center (GSFC) Walt.Truszkowski@gsfc.nasa.gov
From: FLAIRS-01 Proceedings. Copyright 2001, AAAI (www.aaai.org). All rights reserved. Autonomy for SOHO Ground Operations Walt Truszkowski, NASA Goddard Space Flight Center (GSFC) Walt.Truszkowski@gsfc.nasa.gov
BUILDING A FAULT TOLERANT ARCHITECTURE FOR INTERNET ROBOTS USING MOBILE AGENTS
 Proceedings of the 1 st British Workshop on Internet and Online Robots (IORW), University of Reading, 28 th May 2003 BUILDING A FAULT TOLERANT ARCHITECTURE FOR INTERNET ROBOTS USING MOBILE AGENTS Liam
Proceedings of the 1 st British Workshop on Internet and Online Robots (IORW), University of Reading, 28 th May 2003 BUILDING A FAULT TOLERANT ARCHITECTURE FOR INTERNET ROBOTS USING MOBILE AGENTS Liam
Long Term Autonomy in Office Environments
 Long Term Autonomy in Office Environments Wim Meeussen, Eitan Marder-Eppstein, Kevin Watts, Brian Gerkey Willow Garage, Inc. Abstract We know that robust autonomy, even in constrained environments, is
Long Term Autonomy in Office Environments Wim Meeussen, Eitan Marder-Eppstein, Kevin Watts, Brian Gerkey Willow Garage, Inc. Abstract We know that robust autonomy, even in constrained environments, is
Motion Capture Sistemi a marker passivi
 Motion Capture Sistemi a marker passivi N. Alberto Borghese Laboratory of Human Motion Analysis and Virtual Reality (MAVR) Department of Computer Science University of Milano 1/41 Outline Introduction:
Motion Capture Sistemi a marker passivi N. Alberto Borghese Laboratory of Human Motion Analysis and Virtual Reality (MAVR) Department of Computer Science University of Milano 1/41 Outline Introduction:
TRENTINO - The research, training and mobility programme in Trentino - PCOFUND-GA-2008-226070
 Ricercatore: Ilya Afanasyev Soggetto ospitante: UNIVERSITA' DEGLI STUDI DI TRENTO Bando: Incoming post doc 2009 Soggetto partner (solo per outgoing): e-mail: ilya.afanasyev@unitn.it, ilya.afanasyev@gmail.com
Ricercatore: Ilya Afanasyev Soggetto ospitante: UNIVERSITA' DEGLI STUDI DI TRENTO Bando: Incoming post doc 2009 Soggetto partner (solo per outgoing): e-mail: ilya.afanasyev@unitn.it, ilya.afanasyev@gmail.com
Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots
![Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots](/thumbs/27/11692183.jpg "Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots") Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Exploring the Synergistic Relationships Between BPC, BW and HANA
 September 9 11, 2013 Anaheim, California Exploring the Synergistic Relationships Between, BW and HANA Sheldon Edelstein SAP Database and Solution Management Learning Points SAP Business Planning and Consolidation
September 9 11, 2013 Anaheim, California Exploring the Synergistic Relationships Between, BW and HANA Sheldon Edelstein SAP Database and Solution Management Learning Points SAP Business Planning and Consolidation
Cloud Computing for Agent-based Traffic Management Systems
 Cloud Computing for Agent-based Traffic Management Systems Manoj A Patil Asst.Prof. IT Dept. Khyamling A Parane Asst.Prof. CSE Dept. D. Rajesh Asst.Prof. IT Dept. ABSTRACT Increased traffic congestion
Cloud Computing for Agent-based Traffic Management Systems Manoj A Patil Asst.Prof. IT Dept. Khyamling A Parane Asst.Prof. CSE Dept. D. Rajesh Asst.Prof. IT Dept. ABSTRACT Increased traffic congestion
Real-Time Component Software. slide credits: H. Kopetz, P. Puschner
 Real-Time Component Software slide credits: H. Kopetz, P. Puschner Overview OS services Task Structure Task Interaction Input/Output Error Detection 2 Operating System and Middleware Applica3on So5ware
Real-Time Component Software slide credits: H. Kopetz, P. Puschner Overview OS services Task Structure Task Interaction Input/Output Error Detection 2 Operating System and Middleware Applica3on So5ware
Design Specifications of an UAV for Environmental Monitoring, Safety, Video Surveillance, and Urban Security
 Design Specifications of an UAV for Environmental Monitoring, Safety, Video Surveillance, and Urban Security A. Alessandri, P. Bagnerini, M. Gaggero, M. Ghio, R. Martinelli University of Genoa - Faculty
Design Specifications of an UAV for Environmental Monitoring, Safety, Video Surveillance, and Urban Security A. Alessandri, P. Bagnerini, M. Gaggero, M. Ghio, R. Martinelli University of Genoa - Faculty
1 Introduction. 2 Agent Chameleons
 Proceedings of the IEEE SMC UK-RI Chapter Conference 2004 on Intelligent Cybernetic Systems September 7-8, 2004, Londonderry, U.K. Virtual Personal Assistants in a Pervasive Computing World John F. Bradley,
Proceedings of the IEEE SMC UK-RI Chapter Conference 2004 on Intelligent Cybernetic Systems September 7-8, 2004, Londonderry, U.K. Virtual Personal Assistants in a Pervasive Computing World John F. Bradley,
Architectures and Design Methodologies for Micro and Nanocomputing
 Architectures and Design Methodologies for Micro and Nanocomputing PhD Poster Day, December 4, 2014 Matteo Bollo 1 (ID: 24367, I PhD Year) Tutor: Maurizio Zamboni 1 Collaborators: Mariagrazia Graziano
Architectures and Design Methodologies for Micro and Nanocomputing PhD Poster Day, December 4, 2014 Matteo Bollo 1 (ID: 24367, I PhD Year) Tutor: Maurizio Zamboni 1 Collaborators: Mariagrazia Graziano
Robotics and Avionics
 Professor Emeritus Lars Asplund Professor Kristina Lundqvist The Embedded Systems research area and Avionics Mer -14 hearing, May 21, 2014 Guest Professor Jose F Martinez Professor Fredrik Bruhn Professor
Professor Emeritus Lars Asplund Professor Kristina Lundqvist The Embedded Systems research area and Avionics Mer -14 hearing, May 21, 2014 Guest Professor Jose F Martinez Professor Fredrik Bruhn Professor
Artificial Intelligence
 Artificial Intelligence ICS461 Fall 2010 Nancy E. Reed nreed@hawaii.edu 1 Lecture #2- Intelligent Agents What is an intelligent? Agents and s Rationality PEAS (Performance measure, Environment, Actuators,
Artificial Intelligence ICS461 Fall 2010 Nancy E. Reed nreed@hawaii.edu 1 Lecture #2- Intelligent Agents What is an intelligent? Agents and s Rationality PEAS (Performance measure, Environment, Actuators,
Trading. Theory and Practice
 Professional Automated Trading Theory and Practice EUGENE A. DURENARD WILEY Contents Preface xv CHAPTffi 1 introductiofl to Systematic Tradlns 1 1.1 Definition of Systematic Trading 2 1.2 Philosophy of
Professional Automated Trading Theory and Practice EUGENE A. DURENARD WILEY Contents Preface xv CHAPTffi 1 introductiofl to Systematic Tradlns 1 1.1 Definition of Systematic Trading 2 1.2 Philosophy of
How To Make Sense Of Data With Altilia
 HOW TO MAKE SENSE OF BIG DATA TO BETTER DRIVE BUSINESS PROCESSES, IMPROVE DECISION-MAKING, AND SUCCESSFULLY COMPETE IN TODAY S MARKETS. ALTILIA turns Big Data into Smart Data and enables businesses to
HOW TO MAKE SENSE OF BIG DATA TO BETTER DRIVE BUSINESS PROCESSES, IMPROVE DECISION-MAKING, AND SUCCESSFULLY COMPETE IN TODAY S MARKETS. ALTILIA turns Big Data into Smart Data and enables businesses to