Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
|
|
|
- Rosaline Oliver
- 8 years ago
- Views:
Transcription
1 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1

2 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity Fixed resolution (does not adapt to the belief) Particle filters are a way to efficiently represent non-gaussian distribution Basic principle Set of state hypotheses ( particles ) Survival-of-the-fittest 2
")
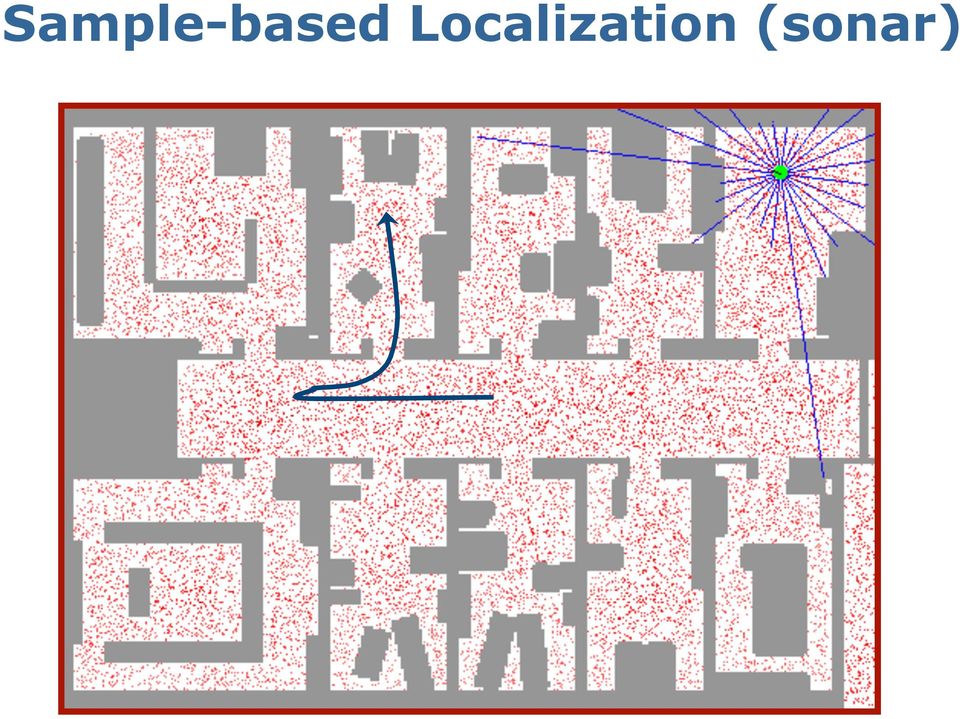
3 Sample-based Localization (sonar)
4 Mathematical Description Set of weighted samples State hypothesis Importance weight The samples represent the posterior 4

5 Function Approximation Particle sets can be used to approximate functions The more particles fall into an interval, the higher the probability of that interval How to draw samples from a function/distribution? 5

6 Rejection Sampling Let us assume that f(x)<1 for all x Sample x from a uniform distribution Sample c from [0,1] if f(x) > c keep the sample otherwise reject the sample c x f(x) x f(x ) c OK 6
![Sample c from [0,1] if f(x) > c keep the sample](/docs-images/41/8167616/images/page_6.jpg "otherwise reject the sample c x f(x) x f(x ) c")
7 Importance Sampling Principle We can even use a different distribution g to generate samples from f By introducing an importance weight w, we can account for the differences between g and f w = f / g f is called target g is called proposal Pre-condition: f(x)>0 à g(x)>0 Derivation: See webpage 7
>0 à g(x)>0 Derivation: See")
8 Importance Sampling with Resampling: Landmark Detection Example

9 Distributions

10 Distributions Wanted: samples distributed according to p(x z 1, z 2, z 3 ) 10

11 This is Easy! We can draw samples from p(x z l ) by adding noise to the detection parameters.

12 Importance Sampling Target distribution f : p(x z 1, z 2,..., z n ) = k p(z k x) p(z 1, z 2,..., z n ) Sampling distribution g: p(x z l ) = p(z l x)p(x) p(z l ) p(x) Importance weights w: f g = p(x z 1, z 2,..., z n ) p(x z l ) = p(z l ) p(z k x) k l p(z 1, z 2,..., z n )
 Importance weights w: f g = p(x z 1, z 2,.")
13 Importance Sampling with Resampling Weighted samples After resampling

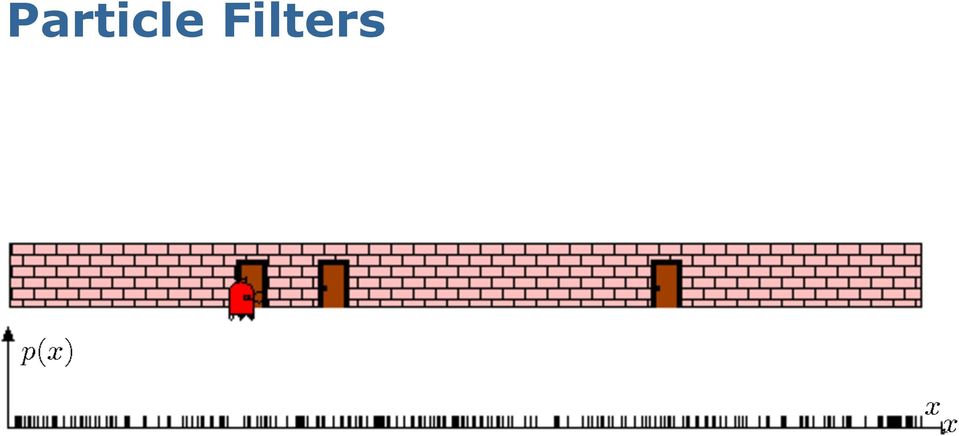
14 Particle Filters
15 Sensor Information: Importance Sampling Bel( x) w α p( z x) Bel α p( z x) Bel Bel ( x) ( x) ( x) = α p( z x)
 Bel Bel ( x) ( x) ( x)")
16 Robot Motion Bel (x) p(x u, x') Bel(x') d x'
")
17 Sensor Information: Importance Sampling Bel(x) α p(z x) Bel (x) w α p(z x) Bel (x) Bel (x) = α p(z x)
 Bel (x) Bel (x)")
18 Robot Motion Bel (x) p(x u, x') Bel(x') d x'
")
19 Particle Filter Algorithm Sample the next generation for particles using the proposal distribution Compute the importance weights : weight = target distribution / proposal distribution Resampling: Replace unlikely samples by more likely ones 19

20 Particle Filter Algorithm 1. Algorithm particle_filter( S t-1, u t, z t ): 2. S t 3. For i =1,, n Generate new samples 4. Sample index j(i) from the discrete distribution given by w t-1 i j(i) 5. Sample x t from p(x t x t 1,u t ) using x t 1 and 6. w i t = p(z t x i t ) Compute importance weight i 7. η = η + w t Update normalization factor 8. S t = S t {< x i t, w i t >} Add to new particle set 9. For =, η = 0 i =1,, n 10. w i t = w i t /η Normalize weights u t 20

21 Particle Filter Algorithm Bel(x t ) = η p(z t x t ) p(x t x t 1,u t ) Bel(x t 1 ) dx t 1 Importance factor for x i t : w t i = draw x i t-1 from Bel(x t-1 ) draw x i t from p(x t xi t-1,u t ) target distribution proposal distribution = η p(z t x t ) p(x t x t 1,u t ) Bel (x t 1 ) p(x t x t 1,u t ) Bel (x t 1 ) p(z t x t )
22 Resampling Given: Set S of weighted samples. Wanted : Random sample, where the probability of drawing x i is given by w i. Typically done n times with replacement to generate new sample set S.
23 Resampling W n-1 w n w 1 w 2 W n-1 w n w 1 w 2 w 3 w 3 Roulette wheel Binary search, n log n Stochastic universal sampling Systematic resampling Linear time complexity Easy to implement, low variance
24 Resampling Algorithm 1. Algorithm systematic_resampling(s,n): 1 2. S ' =, c1 = w 3. For i = 2 n Generate cdf i 4. c i = ci 1 + w 1 5. u ~ U]0, n ], i 1 Initialize threshold 1 = 6. For j =1 n Draw samples 7. While ( u j > c i ) Skip until next threshold reached 8. i = i { i 1 S' = S' < x, n > } Insert 10. u = u 1 n Increment threshold j+ 1 j Return S Also called stochastic universal sampling
25 Mobile Robot Localization Each particle is a potential pose of the robot Proposal distribution is the motion model of the robot (prediction step) The observation model is used to compute the importance weight (correction step) [For details, see PDF file on the lecture web page] 25
26 Motion Model Reminder end pose start pose According to the estimated motion
27 Motion Model Reminder rotation translation rotation Decompose the motion into Traveled distance Start rotation End rotation
28 Motion Model Reminder Uncertainty in the translation of the robot: Gaussian over the traveled distance Uncertainty in the rotation of the robot: Gaussians over start and end rotation For each particle, draw a new pose by sampling from these three individual normal distributions
29 Motion Model Reminder Start
30 Proximity Sensor Model Reminder Laser sensor Sonar sensor
31 Mobile Robot Localization Using Particle Filters (1) Each particle is a potential pose of the robot The set of weighted particles approximates the posterior belief about the robot s pose (target distribution) 31
32 Mobile Robot Localization Using Particle Filters (2) Particles are drawn from the motion model (proposal distribution) Particles are weighted according to the observation model (sensor model) Particles are resampled according to the particle weights 32
33 Mobile Robot Localization Using Particle Filters (3) Why is resampling needed? We only have a finite number of particles Without resampling: The filter is likely to loose track of the good hypotheses Resampling ensures that particles stay in the meaningful area of the state space 33
34 34
35 35
36 36
37 37
38 38
39 39
40 40
41 41
42 42
43 43
44 44
45 45
46 46
47 47
48 48
49 49
50 50
51 Sample-based Localization (sonar) 51
52 Initial Distribution 52
53 After Incorporating Ten Ultrasound Scans 53
54 After Incorporating 65 Ultrasound Scans 54
55 Estimated Path 55
56 Using Ceiling Maps for Localization [Dellaert et al. 99]
57 Vision-based Localization z P(z x) h(x)
58 Under a Light Measurement z: P(z x):
59 Next to a Light Measurement z: P(z x):
60 Elsewhere Measurement z: P(z x):
61 Global Localization Using Vision
62 Limitations The approach described so far is able to track the pose of a mobile robot and to globally localize the robot How can we deal with localization errors (i.e., the kidnapped robot problem)? 63
63 Approaches Randomly insert a fixed number of samples This assumes that the robot can be teleported at any point in time Alternatively, insert random samples proportional to the average likelihood of the particles 64
64 Summary Particle Filters Particle filters are an implementation of recursive Bayesian filtering They represent the posterior by a set of weighted samples They can model non-gaussian distributions Proposal to draw new samples Weight to account for the differences between the proposal and the target Monte Carlo filter, Survival of the fittest, Condensation, Bootstrap filter 65
65 Summary PF Localization In the context of localization, the particles are propagated according to the motion model. They are then weighted according to the likelihood of the observations. In a re-sampling step, new particles are drawn with a probability proportional to the likelihood of the observation. 66
Master s thesis tutorial: part III
 for the Autonomous Compliant Research group Tinne De Laet, Wilm Decré, Diederik Verscheure Katholieke Universiteit Leuven, Department of Mechanical Engineering, PMA Division 30 oktober 2006 Outline General
for the Autonomous Compliant Research group Tinne De Laet, Wilm Decré, Diederik Verscheure Katholieke Universiteit Leuven, Department of Mechanical Engineering, PMA Division 30 oktober 2006 Outline General
E190Q Lecture 5 Autonomous Robot Navigation
 E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
P r oba bi l i sti c R oboti cs. Yrd. Doç. Dr. SIRMA YAVUZ sirma@ce.yildiz.edu.tr Room 130
 P r oba bi l i sti c R oboti cs Yrd. Doç. Dr. SIRMA YAVUZ sirma@ce.yildiz.edu.tr Room 130 Orgazinational Lecture: Thursday 13:00 15:50 Office Hours: Tuesday 13:00-14:00 Thursday 11:00-12:00 Exams: 1 Midterm
P r oba bi l i sti c R oboti cs Yrd. Doç. Dr. SIRMA YAVUZ sirma@ce.yildiz.edu.tr Room 130 Orgazinational Lecture: Thursday 13:00 15:50 Office Hours: Tuesday 13:00-14:00 Thursday 11:00-12:00 Exams: 1 Midterm
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
An Introduction to Using WinBUGS for Cost-Effectiveness Analyses in Health Economics
 Slide 1 An Introduction to Using WinBUGS for Cost-Effectiveness Analyses in Health Economics Dr. Christian Asseburg Centre for Health Economics Part 1 Slide 2 Talk overview Foundations of Bayesian statistics
Slide 1 An Introduction to Using WinBUGS for Cost-Effectiveness Analyses in Health Economics Dr. Christian Asseburg Centre for Health Economics Part 1 Slide 2 Talk overview Foundations of Bayesian statistics
Robot Navigation. Johannes Maurer, Institute for Software Technology TEDUSAR Summerschool 2014. u www.tugraz.at
 1 Robot Navigation u www.tugraz.at 2 Motivation challenges physical laws e.g. inertia, acceleration uncertainty e.g. maps, observations geometric constraints e.g. shape of a robot dynamic environment e.g.
1 Robot Navigation u www.tugraz.at 2 Motivation challenges physical laws e.g. inertia, acceleration uncertainty e.g. maps, observations geometric constraints e.g. shape of a robot dynamic environment e.g.
Real-time Visual Tracker by Stream Processing
 Real-time Visual Tracker by Stream Processing Simultaneous and Fast 3D Tracking of Multiple Faces in Video Sequences by Using a Particle Filter Oscar Mateo Lozano & Kuzahiro Otsuka presented by Piotr Rudol
Real-time Visual Tracker by Stream Processing Simultaneous and Fast 3D Tracking of Multiple Faces in Video Sequences by Using a Particle Filter Oscar Mateo Lozano & Kuzahiro Otsuka presented by Piotr Rudol
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Robot Motion Probabilistic models of mobile robots Robot motion Kinematics Velocity motion model Odometry
SIMULTANEOUS LOCALIZATION AND MAPPING FOR EVENT-BASED VISION SYSTEMS
 SIMULTANEOUS LOCALIZATION AND MAPPING FOR EVENT-BASED VISION SYSTEMS David Weikersdorfer, Raoul Hoffmann, Jörg Conradt 9-th International Conference on Computer Vision Systems 18-th July 2013, St. Petersburg,
SIMULTANEOUS LOCALIZATION AND MAPPING FOR EVENT-BASED VISION SYSTEMS David Weikersdorfer, Raoul Hoffmann, Jörg Conradt 9-th International Conference on Computer Vision Systems 18-th July 2013, St. Petersburg,
Particle Filters and Their Applications
 Particle Filters and Their Applications Kaijen Hsiao Henry de Plinval-Salgues Jason Miller Cognitive Robotics April 11, 2005 1 Why Particle Filters? Tool for tracking the state of a dynamic system modeled
Particle Filters and Their Applications Kaijen Hsiao Henry de Plinval-Salgues Jason Miller Cognitive Robotics April 11, 2005 1 Why Particle Filters? Tool for tracking the state of a dynamic system modeled
Data Modeling & Analysis Techniques. Probability & Statistics. Manfred Huber 2011 1
 Data Modeling & Analysis Techniques Probability & Statistics Manfred Huber 2011 1 Probability and Statistics Probability and statistics are often used interchangeably but are different, related fields
Data Modeling & Analysis Techniques Probability & Statistics Manfred Huber 2011 1 Probability and Statistics Probability and statistics are often used interchangeably but are different, related fields
Artificial Intelligence
 Artificial Intelligence Robotics RWTH Aachen 1 Term and History Term comes from Karel Capek s play R.U.R. Rossum s universal robots Robots comes from the Czech word for corvee Manipulators first start
Artificial Intelligence Robotics RWTH Aachen 1 Term and History Term comes from Karel Capek s play R.U.R. Rossum s universal robots Robots comes from the Czech word for corvee Manipulators first start
A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking
 174 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 50, NO. 2, FEBRUARY 2002 A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking M. Sanjeev Arulampalam, Simon Maskell, Neil
174 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 50, NO. 2, FEBRUARY 2002 A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking M. Sanjeev Arulampalam, Simon Maskell, Neil
Recursive Estimation
 Recursive Estimation Raffaello D Andrea Spring 04 Problem Set : Bayes Theorem and Bayesian Tracking Last updated: March 8, 05 Notes: Notation: Unlessotherwisenoted,x, y,andz denoterandomvariables, f x
Recursive Estimation Raffaello D Andrea Spring 04 Problem Set : Bayes Theorem and Bayesian Tracking Last updated: March 8, 05 Notes: Notation: Unlessotherwisenoted,x, y,andz denoterandomvariables, f x
DP-SLAM: Fast, Robust Simultaneous Localization and Mapping Without Predetermined Landmarks
 DP-SLAM: Fast, Robust Simultaneous Localization and Mapping Without Predetermined Landmarks Austin Eliazar and Ronald Parr Department of Computer Science Duke University eliazar, parr @cs.duke.edu Abstract
DP-SLAM: Fast, Robust Simultaneous Localization and Mapping Without Predetermined Landmarks Austin Eliazar and Ronald Parr Department of Computer Science Duke University eliazar, parr @cs.duke.edu Abstract
How To Solve A Sequential Mca Problem
 Monte Carlo-based statistical methods (MASM11/FMS091) Jimmy Olsson Centre for Mathematical Sciences Lund University, Sweden Lecture 6 Sequential Monte Carlo methods II February 3, 2012 Changes in HA1 Problem
Monte Carlo-based statistical methods (MASM11/FMS091) Jimmy Olsson Centre for Mathematical Sciences Lund University, Sweden Lecture 6 Sequential Monte Carlo methods II February 3, 2012 Changes in HA1 Problem
Introduction to Probability
 Introduction to Probability EE 179, Lecture 15, Handout #24 Probability theory gives a mathematical characterization for experiments with random outcomes. coin toss life of lightbulb binary data sequence
Introduction to Probability EE 179, Lecture 15, Handout #24 Probability theory gives a mathematical characterization for experiments with random outcomes. coin toss life of lightbulb binary data sequence
Statistics Graduate Courses
 Statistics Graduate Courses STAT 7002--Topics in Statistics-Biological/Physical/Mathematics (cr.arr.).organized study of selected topics. Subjects and earnable credit may vary from semester to semester.
Statistics Graduate Courses STAT 7002--Topics in Statistics-Biological/Physical/Mathematics (cr.arr.).organized study of selected topics. Subjects and earnable credit may vary from semester to semester.
Random Variate Generation (Part 3)
") Random Variate Generation (Part 3) Dr.Çağatay ÜNDEĞER Öğretim Görevlisi Bilkent Üniversitesi Bilgisayar Mühendisliği Bölümü &... e-mail : cagatay@undeger.com cagatay@cs.bilkent.edu.tr Bilgisayar Mühendisliği
Random Variate Generation (Part 3) Dr.Çağatay ÜNDEĞER Öğretim Görevlisi Bilkent Üniversitesi Bilgisayar Mühendisliği Bölümü &... e-mail : cagatay@undeger.com cagatay@cs.bilkent.edu.tr Bilgisayar Mühendisliği
Robot Sensors. Outline. The Robot Structure. Robots and Sensors. Henrik I Christensen
 Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 hic@cc.gatech.edu Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Robot Sensors Henrik I Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0760 hic@cc.gatech.edu Henrik I Christensen (RIM@GT) Sensors 1 / 38 Outline 1
Robotics. Lecture 3: Sensors. See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information.
 Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
Bayesian Filters for Location Estimation
 Bayesian Filters for Location Estimation Dieter Fo Jeffrey Hightower, Lin Liao Dirk Schulz Gaetano Borriello, University of Washington, Dept. of Computer Science & Engineering, Seattle, WA Intel Research
Bayesian Filters for Location Estimation Dieter Fo Jeffrey Hightower, Lin Liao Dirk Schulz Gaetano Borriello, University of Washington, Dept. of Computer Science & Engineering, Seattle, WA Intel Research
BNG 202 Biomechanics Lab. Descriptive statistics and probability distributions I
 BNG 202 Biomechanics Lab Descriptive statistics and probability distributions I Overview The overall goal of this short course in statistics is to provide an introduction to descriptive and inferential
BNG 202 Biomechanics Lab Descriptive statistics and probability distributions I Overview The overall goal of this short course in statistics is to provide an introduction to descriptive and inferential
Probability Hypothesis Density filter versus Multiple Hypothesis Tracking
 Probability Hypothesis Density filter versus Multiple Hypothesis Tracing Kusha Panta a, Ba-Ngu Vo a, Sumeetpal Singh a and Arnaud Doucet b a Co-operative Research Centre for Sensor and Information Processing
Probability Hypothesis Density filter versus Multiple Hypothesis Tracing Kusha Panta a, Ba-Ngu Vo a, Sumeetpal Singh a and Arnaud Doucet b a Co-operative Research Centre for Sensor and Information Processing
MONT 107N Understanding Randomness Solutions For Final Examination May 11, 2010
 MONT 07N Understanding Randomness Solutions For Final Examination May, 00 Short Answer (a) (0) How are the EV and SE for the sum of n draws with replacement from a box computed? Solution: The EV is n times
MONT 07N Understanding Randomness Solutions For Final Examination May, 00 Short Answer (a) (0) How are the EV and SE for the sum of n draws with replacement from a box computed? Solution: The EV is n times
Experimental Uncertainty and Probability
 02/04/07 PHY310: Statistical Data Analysis 1 PHY310: Lecture 03 Experimental Uncertainty and Probability Road Map The meaning of experimental uncertainty The fundamental concepts of probability 02/04/07
02/04/07 PHY310: Statistical Data Analysis 1 PHY310: Lecture 03 Experimental Uncertainty and Probability Road Map The meaning of experimental uncertainty The fundamental concepts of probability 02/04/07
Model-based Synthesis. Tony O Hagan
 Model-based Synthesis Tony O Hagan Stochastic models Synthesising evidence through a statistical model 2 Evidence Synthesis (Session 3), Helsinki, 28/10/11 Graphical modelling The kinds of models that
Model-based Synthesis Tony O Hagan Stochastic models Synthesising evidence through a statistical model 2 Evidence Synthesis (Session 3), Helsinki, 28/10/11 Graphical modelling The kinds of models that
Real-Time Camera Tracking Using a Particle Filter
 Real-Time Camera Tracking Using a Particle Filter Mark Pupilli and Andrew Calway Department of Computer Science University of Bristol, UK {pupilli,andrew}@cs.bris.ac.uk Abstract We describe a particle
Real-Time Camera Tracking Using a Particle Filter Mark Pupilli and Andrew Calway Department of Computer Science University of Bristol, UK {pupilli,andrew}@cs.bris.ac.uk Abstract We describe a particle
Volumetric Path Tracing
 Volumetric Path Tracing Steve Marschner Cornell University CS 6630 Spring 2012, 8 March Using Monte Carlo integration is a good, easy way to get correct solutions to the radiative transfer equation. It
Volumetric Path Tracing Steve Marschner Cornell University CS 6630 Spring 2012, 8 March Using Monte Carlo integration is a good, easy way to get correct solutions to the radiative transfer equation. It
Deterministic Sampling-based Switching Kalman Filtering for Vehicle Tracking
 Proceedings of the IEEE ITSC 2006 2006 IEEE Intelligent Transportation Systems Conference Toronto, Canada, September 17-20, 2006 WA4.1 Deterministic Sampling-based Switching Kalman Filtering for Vehicle
Proceedings of the IEEE ITSC 2006 2006 IEEE Intelligent Transportation Systems Conference Toronto, Canada, September 17-20, 2006 WA4.1 Deterministic Sampling-based Switching Kalman Filtering for Vehicle
Overview of Monte Carlo Simulation, Probability Review and Introduction to Matlab
 Monte Carlo Simulation: IEOR E4703 Fall 2004 c 2004 by Martin Haugh Overview of Monte Carlo Simulation, Probability Review and Introduction to Matlab 1 Overview of Monte Carlo Simulation 1.1 Why use simulation?
Monte Carlo Simulation: IEOR E4703 Fall 2004 c 2004 by Martin Haugh Overview of Monte Carlo Simulation, Probability Review and Introduction to Matlab 1 Overview of Monte Carlo Simulation 1.1 Why use simulation?
Discrete Frobenius-Perron Tracking
 Discrete Frobenius-Perron Tracing Barend J. van Wy and Michaël A. van Wy French South-African Technical Institute in Electronics at the Tshwane University of Technology Staatsartillerie Road, Pretoria,
Discrete Frobenius-Perron Tracing Barend J. van Wy and Michaël A. van Wy French South-African Technical Institute in Electronics at the Tshwane University of Technology Staatsartillerie Road, Pretoria,
Bayesian Phylogeny and Measures of Branch Support
 Bayesian Phylogeny and Measures of Branch Support Bayesian Statistics Imagine we have a bag containing 100 dice of which we know that 90 are fair and 10 are biased. The
Bayesian Phylogeny and Measures of Branch Support Bayesian Statistics Imagine we have a bag containing 100 dice of which we know that 90 are fair and 10 are biased. The
FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem With Unknown Data Association
 FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem With Unknown Data Association Michael Montemerlo 11th July 2003 CMU-RI-TR-03-28 The Robotics Institute Carnegie Mellon
FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem With Unknown Data Association Michael Montemerlo 11th July 2003 CMU-RI-TR-03-28 The Robotics Institute Carnegie Mellon
Basics of Statistical Machine Learning
 CS761 Spring 2013 Advanced Machine Learning Basics of Statistical Machine Learning Lecturer: Xiaojin Zhu jerryzhu@cs.wisc.edu Modern machine learning is rooted in statistics. You will find many familiar
CS761 Spring 2013 Advanced Machine Learning Basics of Statistical Machine Learning Lecturer: Xiaojin Zhu jerryzhu@cs.wisc.edu Modern machine learning is rooted in statistics. You will find many familiar
Monte Carlo-based statistical methods (MASM11/FMS091)
") Monte Carlo-based statistical methods (MASM11/FMS091) Magnus Wiktorsson Centre for Mathematical Sciences Lund University, Sweden Lecture 6 Sequential Monte Carlo methods II February 7, 2014 M. Wiktorsson
Monte Carlo-based statistical methods (MASM11/FMS091) Magnus Wiktorsson Centre for Mathematical Sciences Lund University, Sweden Lecture 6 Sequential Monte Carlo methods II February 7, 2014 M. Wiktorsson
Signal Detection. Outline. Detection Theory. Example Applications of Detection Theory
 Outline Signal Detection M. Sami Fadali Professor of lectrical ngineering University of Nevada, Reno Hypothesis testing. Neyman-Pearson (NP) detector for a known signal in white Gaussian noise (WGN). Matched
Outline Signal Detection M. Sami Fadali Professor of lectrical ngineering University of Nevada, Reno Hypothesis testing. Neyman-Pearson (NP) detector for a known signal in white Gaussian noise (WGN). Matched
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 6 Three Approaches to Classification Construct
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 6 Three Approaches to Classification Construct
Understanding and Applying Kalman Filtering
 Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Performance evaluation of multi-camera visual tracking
 Performance evaluation of multi-camera visual tracking Lucio Marcenaro, Pietro Morerio, Mauricio Soto, Andrea Zunino, Carlo S. Regazzoni DITEN, University of Genova Via Opera Pia 11A 16145 Genoa - Italy
Performance evaluation of multi-camera visual tracking Lucio Marcenaro, Pietro Morerio, Mauricio Soto, Andrea Zunino, Carlo S. Regazzoni DITEN, University of Genova Via Opera Pia 11A 16145 Genoa - Italy
EE 570: Location and Navigation
 EE 570: Location and Navigation On-Line Bayesian Tracking Aly El-Osery 1 Stephen Bruder 2 1 Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA 2 Electrical and Computer Engineering
EE 570: Location and Navigation On-Line Bayesian Tracking Aly El-Osery 1 Stephen Bruder 2 1 Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA 2 Electrical and Computer Engineering
Gibbs Sampling and Online Learning Introduction
 Statistical Techniques in Robotics (16-831, F14) Lecture#10(Tuesday, September 30) Gibbs Sampling and Online Learning Introduction Lecturer: Drew Bagnell Scribes: {Shichao Yang} 1 1 Sampling Samples are
Statistical Techniques in Robotics (16-831, F14) Lecture#10(Tuesday, September 30) Gibbs Sampling and Online Learning Introduction Lecturer: Drew Bagnell Scribes: {Shichao Yang} 1 1 Sampling Samples are
Linear Threshold Units
 Linear Threshold Units w x hx (... w n x n w We assume that each feature x j and each weight w j is a real number (we will relax this later) We will study three different algorithms for learning linear
Linear Threshold Units w x hx (... w n x n w We assume that each feature x j and each weight w j is a real number (we will relax this later) We will study three different algorithms for learning linear
Linear regression methods for large n and streaming data
 Linear regression methods for large n and streaming data Large n and small or moderate p is a fairly simple problem. The sufficient statistic for β in OLS (and ridge) is: The concept of sufficiency is
Linear regression methods for large n and streaming data Large n and small or moderate p is a fairly simple problem. The sufficient statistic for β in OLS (and ridge) is: The concept of sufficiency is
Introduction to Detection Theory
 Introduction to Detection Theory Reading: Ch. 3 in Kay-II. Notes by Prof. Don Johnson on detection theory, see http://www.ece.rice.edu/~dhj/courses/elec531/notes5.pdf. Ch. 10 in Wasserman. EE 527, Detection
Introduction to Detection Theory Reading: Ch. 3 in Kay-II. Notes by Prof. Don Johnson on detection theory, see http://www.ece.rice.edu/~dhj/courses/elec531/notes5.pdf. Ch. 10 in Wasserman. EE 527, Detection
Part 4 fitting with energy loss and multiple scattering non gaussian uncertainties outliers
 Part 4 fitting with energy loss and multiple scattering non gaussian uncertainties outliers material intersections to treat material effects in track fit, locate material 'intersections' along particle
Part 4 fitting with energy loss and multiple scattering non gaussian uncertainties outliers material intersections to treat material effects in track fit, locate material 'intersections' along particle
Distributed computing of failure probabilities for structures in civil engineering
 Distributed computing of failure probabilities for structures in civil engineering Andrés Wellmann Jelic, University of Bochum (andres.wellmann@rub.de) Matthias Baitsch, University of Bochum (matthias.baitsch@rub.de)
Distributed computing of failure probabilities for structures in civil engineering Andrés Wellmann Jelic, University of Bochum (andres.wellmann@rub.de) Matthias Baitsch, University of Bochum (matthias.baitsch@rub.de)
Similarity Search and Mining in Uncertain Spatial and Spatio Temporal Databases. Andreas Züfle
 Similarity Search and Mining in Uncertain Spatial and Spatio Temporal Databases Andreas Züfle Geo Spatial Data Huge flood of geo spatial data Modern technology New user mentality Great research potential
Similarity Search and Mining in Uncertain Spatial and Spatio Temporal Databases Andreas Züfle Geo Spatial Data Huge flood of geo spatial data Modern technology New user mentality Great research potential
Real-Time Implementation of a Random Finite Set Particle Filter
 Real-Time Implementation of a Random Finite Set Particle Filter Stephan Reuter, Klaus Dietmayer Institute of Measurement, Control, and Microtechnology University of Ulm, Germany stephan.reuter@uni-ulm.de
Real-Time Implementation of a Random Finite Set Particle Filter Stephan Reuter, Klaus Dietmayer Institute of Measurement, Control, and Microtechnology University of Ulm, Germany stephan.reuter@uni-ulm.de
Random Variables. Chapter 2. Random Variables 1
 Random Variables Chapter 2 Random Variables 1 Roulette and Random Variables A Roulette wheel has 38 pockets. 18 of them are red and 18 are black; these are numbered from 1 to 36. The two remaining pockets
Random Variables Chapter 2 Random Variables 1 Roulette and Random Variables A Roulette wheel has 38 pockets. 18 of them are red and 18 are black; these are numbered from 1 to 36. The two remaining pockets
Christfried Webers. Canberra February June 2015
 c Statistical Group and College of Engineering and Computer Science Canberra February June (Many figures from C. M. Bishop, "Pattern Recognition and ") 1of 829 c Part VIII Linear Classification 2 Logistic
c Statistical Group and College of Engineering and Computer Science Canberra February June (Many figures from C. M. Bishop, "Pattern Recognition and ") 1of 829 c Part VIII Linear Classification 2 Logistic
Forecasting "High" and "Low" of financial time series by Particle systems and Kalman filters
 Forecasting "High" and "Low" of financial time series by Particle systems and Kalman filters S. DABLEMONT, S. VAN BELLEGEM, M. VERLEYSEN Université catholique de Louvain, Machine Learning Group, DICE 3,
Forecasting "High" and "Low" of financial time series by Particle systems and Kalman filters S. DABLEMONT, S. VAN BELLEGEM, M. VERLEYSEN Université catholique de Louvain, Machine Learning Group, DICE 3,
Chapter 4 - Lecture 1 Probability Density Functions and Cumul. Distribution Functions
 Chapter 4 - Lecture 1 Probability Density Functions and Cumulative Distribution Functions October 21st, 2009 Review Probability distribution function Useful results Relationship between the pdf and the
Chapter 4 - Lecture 1 Probability Density Functions and Cumulative Distribution Functions October 21st, 2009 Review Probability distribution function Useful results Relationship between the pdf and the
FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem
 astslam: A actored Solution to the Simultaneous Localiation and Mapping Problem Michael Montemerlo and Sebastian hrun School of Computer Science Carnegie Mellon University Pittsburgh, PA 1513 mmde@cs.cmu.edu,
astslam: A actored Solution to the Simultaneous Localiation and Mapping Problem Michael Montemerlo and Sebastian hrun School of Computer Science Carnegie Mellon University Pittsburgh, PA 1513 mmde@cs.cmu.edu,
Comparing Improved Versions of K-Means and Subtractive Clustering in a Tracking Application
 Comparing Improved Versions of K-Means and Subtractive Clustering in a Tracking Application Marta Marrón Romera, Miguel Angel Sotelo Vázquez, and Juan Carlos García García Electronics Department, University
Comparing Improved Versions of K-Means and Subtractive Clustering in a Tracking Application Marta Marrón Romera, Miguel Angel Sotelo Vázquez, and Juan Carlos García García Electronics Department, University
Robot Perception Continued
 Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
Non Linear Dependence Structures: a Copula Opinion Approach in Portfolio Optimization
 Non Linear Dependence Structures: a Copula Opinion Approach in Portfolio Optimization Jean- Damien Villiers ESSEC Business School Master of Sciences in Management Grande Ecole September 2013 1 Non Linear
Non Linear Dependence Structures: a Copula Opinion Approach in Portfolio Optimization Jean- Damien Villiers ESSEC Business School Master of Sciences in Management Grande Ecole September 2013 1 Non Linear
Bayesian Statistics: Indian Buffet Process
 Bayesian Statistics: Indian Buffet Process Ilker Yildirim Department of Brain and Cognitive Sciences University of Rochester Rochester, NY 14627 August 2012 Reference: Most of the material in this note
Bayesian Statistics: Indian Buffet Process Ilker Yildirim Department of Brain and Cognitive Sciences University of Rochester Rochester, NY 14627 August 2012 Reference: Most of the material in this note
Wireless Networking Trends Architectures, Protocols & optimizations for future networking scenarios
 Wireless Networking Trends Architectures, Protocols & optimizations for future networking scenarios H. Fathi, J. Figueiras, F. Fitzek, T. Madsen, R. Olsen, P. Popovski, HP Schwefel Session 1 Network Evolution
Wireless Networking Trends Architectures, Protocols & optimizations for future networking scenarios H. Fathi, J. Figueiras, F. Fitzek, T. Madsen, R. Olsen, P. Popovski, HP Schwefel Session 1 Network Evolution
Gaussian Processes for Signal Strength-Based Location Estimation
 In Proc. of Robotics Science and Systems, 2006. Gaussian Processes for Signal Strength-Based Location Estimation Brian Ferris Dirk Hähnel Dieter Fox University of Washington, Department of Computer Science
In Proc. of Robotics Science and Systems, 2006. Gaussian Processes for Signal Strength-Based Location Estimation Brian Ferris Dirk Hähnel Dieter Fox University of Washington, Department of Computer Science
Tutorial on Markov Chain Monte Carlo
 Tutorial on Markov Chain Monte Carlo Kenneth M. Hanson Los Alamos National Laboratory Presented at the 29 th International Workshop on Bayesian Inference and Maximum Entropy Methods in Science and Technology,
Tutorial on Markov Chain Monte Carlo Kenneth M. Hanson Los Alamos National Laboratory Presented at the 29 th International Workshop on Bayesian Inference and Maximum Entropy Methods in Science and Technology,
Sorting revisited. Build the binary search tree: O(n^2) Traverse the binary tree: O(n) Total: O(n^2) + O(n) = O(n^2)
 Traverse the binary tree: O(n) Total: O(n^2) + O(n) = O(n^2)") Sorting revisited How did we use a binary search tree to sort an array of elements? Tree Sort Algorithm Given: An array of elements to sort 1. Build a binary search tree out of the elements 2. Traverse
Sorting revisited How did we use a binary search tree to sort an array of elements? Tree Sort Algorithm Given: An array of elements to sort 1. Build a binary search tree out of the elements 2. Traverse
Chapter 5. Phrase-based models. Statistical Machine Translation
 Chapter 5 Phrase-based models Statistical Machine Translation Motivation Word-Based Models translate words as atomic units Phrase-Based Models translate phrases as atomic units Advantages: many-to-many
Chapter 5 Phrase-based models Statistical Machine Translation Motivation Word-Based Models translate words as atomic units Phrase-Based Models translate phrases as atomic units Advantages: many-to-many
How To Understand And Understand Finance
 Ill. i,t.,. QUANTITATIVE FINANCIAL ECONOMICS STOCKS, BONDS AND FOREIGN EXCHANGE Second Edition KEITH CUTHBERTSON AND DIRK NITZSCHE HOCHSCHULE John Wiley 8k Sons, Ltd CONTENTS Preface Acknowledgements 2.1
Ill. i,t.,. QUANTITATIVE FINANCIAL ECONOMICS STOCKS, BONDS AND FOREIGN EXCHANGE Second Edition KEITH CUTHBERTSON AND DIRK NITZSCHE HOCHSCHULE John Wiley 8k Sons, Ltd CONTENTS Preface Acknowledgements 2.1
Implementation of kalman filter for the indoor location system of a lego nxt mobile robot. Abstract
 Implementation of kalman filter for the indoor location system of a lego nxt mobile robot Leidy López Osorio * Giovanni Bermúdez Bohórquez ** Miguel Pérez Pereira *** submitted date: March 2013 received
Implementation of kalman filter for the indoor location system of a lego nxt mobile robot Leidy López Osorio * Giovanni Bermúdez Bohórquez ** Miguel Pérez Pereira *** submitted date: March 2013 received
Lecture 8: Signal Detection and Noise Assumption
 ECE 83 Fall Statistical Signal Processing instructor: R. Nowak, scribe: Feng Ju Lecture 8: Signal Detection and Noise Assumption Signal Detection : X = W H : X = S + W where W N(, σ I n n and S = [s, s,...,
ECE 83 Fall Statistical Signal Processing instructor: R. Nowak, scribe: Feng Ju Lecture 8: Signal Detection and Noise Assumption Signal Detection : X = W H : X = S + W where W N(, σ I n n and S = [s, s,...,
Advanced Computer Graphics. Rendering Equation. Matthias Teschner. Computer Science Department University of Freiburg
 Advanced Computer Graphics Rendering Equation Matthias Teschner Computer Science Department University of Freiburg Outline rendering equation Monte Carlo integration sampling of random variables University
Advanced Computer Graphics Rendering Equation Matthias Teschner Computer Science Department University of Freiburg Outline rendering equation Monte Carlo integration sampling of random variables University
Program description for the Master s Degree Program in Mathematics and Finance
 Program description for the Master s Degree Program in Mathematics and Finance : English: Master s Degree in Mathematics and Finance Norwegian, bokmål: Master i matematikk og finans Norwegian, nynorsk:
Program description for the Master s Degree Program in Mathematics and Finance : English: Master s Degree in Mathematics and Finance Norwegian, bokmål: Master i matematikk og finans Norwegian, nynorsk:
Robust Infrared Vehicle Tracking across Target Pose Change using L 1 Regularization
 Robust Infrared Vehicle Tracking across Target Pose Change using L 1 Regularization Haibin Ling 1, Li Bai, Erik Blasch 3, and Xue Mei 4 1 Computer and Information Science Department, Temple University,
Robust Infrared Vehicle Tracking across Target Pose Change using L 1 Regularization Haibin Ling 1, Li Bai, Erik Blasch 3, and Xue Mei 4 1 Computer and Information Science Department, Temple University,
PHOTON mapping is a practical approach for computing global illumination within complex
 7 The Photon Mapping Method I get by with a little help from my friends. John Lennon, 1940 1980 PHOTON mapping is a practical approach for computing global illumination within complex environments. Much
7 The Photon Mapping Method I get by with a little help from my friends. John Lennon, 1940 1980 PHOTON mapping is a practical approach for computing global illumination within complex environments. Much
1 Maximum likelihood estimation
 COS 424: Interacting with Data Lecturer: David Blei Lecture #4 Scribes: Wei Ho, Michael Ye February 14, 2008 1 Maximum likelihood estimation 1.1 MLE of a Bernoulli random variable (coin flips) Given N
COS 424: Interacting with Data Lecturer: David Blei Lecture #4 Scribes: Wei Ho, Michael Ye February 14, 2008 1 Maximum likelihood estimation 1.1 MLE of a Bernoulli random variable (coin flips) Given N
Inference on Phase-type Models via MCMC
 Inference on Phase-type Models via MCMC with application to networks of repairable redundant systems Louis JM Aslett and Simon P Wilson Trinity College Dublin 28 th June 202 Toy Example : Redundant Repairable
Inference on Phase-type Models via MCMC with application to networks of repairable redundant systems Louis JM Aslett and Simon P Wilson Trinity College Dublin 28 th June 202 Toy Example : Redundant Repairable
Gaussian Processes to Speed up Hamiltonian Monte Carlo
 Gaussian Processes to Speed up Hamiltonian Monte Carlo Matthieu Lê Murray, Iain http://videolectures.net/mlss09uk_murray_mcmc/ Rasmussen, Carl Edward. "Gaussian processes to speed up hybrid Monte Carlo
Gaussian Processes to Speed up Hamiltonian Monte Carlo Matthieu Lê Murray, Iain http://videolectures.net/mlss09uk_murray_mcmc/ Rasmussen, Carl Edward. "Gaussian processes to speed up hybrid Monte Carlo
The Variability of P-Values. Summary
 The Variability of P-Values Dennis D. Boos Department of Statistics North Carolina State University Raleigh, NC 27695-8203 boos@stat.ncsu.edu August 15, 2009 NC State Statistics Departement Tech Report
The Variability of P-Values Dennis D. Boos Department of Statistics North Carolina State University Raleigh, NC 27695-8203 boos@stat.ncsu.edu August 15, 2009 NC State Statistics Departement Tech Report
A Robust Multiple Object Tracking for Sport Applications 1) Thomas Mauthner, Horst Bischof
 Thomas Mauthner, Horst Bischof") A Robust Multiple Object Tracking for Sport Applications 1) Thomas Mauthner, Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {mauthner,bischof}@icg.tu-graz.ac.at
A Robust Multiple Object Tracking for Sport Applications 1) Thomas Mauthner, Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {mauthner,bischof}@icg.tu-graz.ac.at
Kristine L. Bell and Harry L. Van Trees. Center of Excellence in C 3 I George Mason University Fairfax, VA 22030-4444, USA kbell@gmu.edu, hlv@gmu.
 POSERIOR CRAMÉR-RAO BOUND FOR RACKING ARGE BEARING Kristine L. Bell and Harry L. Van rees Center of Excellence in C 3 I George Mason University Fairfax, VA 22030-4444, USA bell@gmu.edu, hlv@gmu.edu ABSRAC
POSERIOR CRAMÉR-RAO BOUND FOR RACKING ARGE BEARING Kristine L. Bell and Harry L. Van rees Center of Excellence in C 3 I George Mason University Fairfax, VA 22030-4444, USA bell@gmu.edu, hlv@gmu.edu ABSRAC
ROBUST REAL-TIME ON-BOARD VEHICLE TRACKING SYSTEM USING PARTICLES FILTER. Ecole des Mines de Paris, Paris, France
 ROBUST REAL-TIME ON-BOARD VEHICLE TRACKING SYSTEM USING PARTICLES FILTER Bruno Steux Yotam Abramson Ecole des Mines de Paris, Paris, France Abstract: We describe a system for detection and tracking of
ROBUST REAL-TIME ON-BOARD VEHICLE TRACKING SYSTEM USING PARTICLES FILTER Bruno Steux Yotam Abramson Ecole des Mines de Paris, Paris, France Abstract: We describe a system for detection and tracking of
UW CSE Technical Report 03-06-01 Probabilistic Bilinear Models for Appearance-Based Vision
 UW CSE Technical Report 03-06-01 Probabilistic Bilinear Models for Appearance-Based Vision D.B. Grimes A.P. Shon R.P.N. Rao Dept. of Computer Science and Engineering University of Washington Seattle, WA
UW CSE Technical Report 03-06-01 Probabilistic Bilinear Models for Appearance-Based Vision D.B. Grimes A.P. Shon R.P.N. Rao Dept. of Computer Science and Engineering University of Washington Seattle, WA
This document is published at www.agner.org/random, Feb. 2008, as part of a software package.
 Sampling methods by Agner Fog This document is published at www.agner.org/random, Feb. 008, as part of a software package. Introduction A C++ class library of non-uniform random number generators is available
Sampling methods by Agner Fog This document is published at www.agner.org/random, Feb. 008, as part of a software package. Introduction A C++ class library of non-uniform random number generators is available
References. Importance Sampling. Jessi Cisewski (CMU) Carnegie Mellon University. June 2014
 Carnegie Mellon University. June 2014") Jessi Cisewski Carnegie Mellon University June 2014 Outline 1 Recall: Monte Carlo integration 2 3 Examples of (a) Monte Carlo, Monaco (b) Monte Carlo Casino Some content and examples from Wasserman (2004)
Jessi Cisewski Carnegie Mellon University June 2014 Outline 1 Recall: Monte Carlo integration 2 3 Examples of (a) Monte Carlo, Monaco (b) Monte Carlo Casino Some content and examples from Wasserman (2004)
VEHICLE TRACKING USING ACOUSTIC AND VIDEO SENSORS
 VEHICLE TRACKING USING ACOUSTIC AND VIDEO SENSORS Aswin C Sankaranayanan, Qinfen Zheng, Rama Chellappa University of Maryland College Park, MD - 277 {aswch, qinfen, rama}@cfar.umd.edu Volkan Cevher, James
VEHICLE TRACKING USING ACOUSTIC AND VIDEO SENSORS Aswin C Sankaranayanan, Qinfen Zheng, Rama Chellappa University of Maryland College Park, MD - 277 {aswch, qinfen, rama}@cfar.umd.edu Volkan Cevher, James
Lecture 8. Confidence intervals and the central limit theorem
 Lecture 8. Confidence intervals and the central limit theorem Mathematical Statistics and Discrete Mathematics November 25th, 2015 1 / 15 Central limit theorem Let X 1, X 2,... X n be a random sample of
Lecture 8. Confidence intervals and the central limit theorem Mathematical Statistics and Discrete Mathematics November 25th, 2015 1 / 15 Central limit theorem Let X 1, X 2,... X n be a random sample of
Monte Carlo Sampling Methods
 [] Monte Carlo Sampling Methods Jasmina L. Vujic Nuclear Engineering Department University of California, Berkeley Email: vujic@nuc.berkeley.edu phone: (50) 643-8085 fax: (50) 643-9685 [2] Monte Carlo
[] Monte Carlo Sampling Methods Jasmina L. Vujic Nuclear Engineering Department University of California, Berkeley Email: vujic@nuc.berkeley.edu phone: (50) 643-8085 fax: (50) 643-9685 [2] Monte Carlo
Machine Learning. Term 2012/2013 LSI - FIB. Javier Béjar cbea (LSI - FIB) Machine Learning Term 2012/2013 1 / 34
 Machine Learning Term 2012/2013 1 / 34") Machine Learning Javier Béjar cbea LSI - FIB Term 2012/2013 Javier Béjar cbea (LSI - FIB) Machine Learning Term 2012/2013 1 / 34 Outline 1 Introduction to Inductive learning 2 Search and inductive learning
Machine Learning Javier Béjar cbea LSI - FIB Term 2012/2013 Javier Béjar cbea (LSI - FIB) Machine Learning Term 2012/2013 1 / 34 Outline 1 Introduction to Inductive learning 2 Search and inductive learning
The Normal Distribution. Alan T. Arnholt Department of Mathematical Sciences Appalachian State University
 The Normal Distribution Alan T. Arnholt Department of Mathematical Sciences Appalachian State University arnholt@math.appstate.edu Spring 2006 R Notes 1 Copyright c 2006 Alan T. Arnholt 2 Continuous Random
The Normal Distribution Alan T. Arnholt Department of Mathematical Sciences Appalachian State University arnholt@math.appstate.edu Spring 2006 R Notes 1 Copyright c 2006 Alan T. Arnholt 2 Continuous Random
Statistical Machine Learning
 Statistical Machine Learning UoC Stats 37700, Winter quarter Lecture 4: classical linear and quadratic discriminants. 1 / 25 Linear separation For two classes in R d : simple idea: separate the classes
Statistical Machine Learning UoC Stats 37700, Winter quarter Lecture 4: classical linear and quadratic discriminants. 1 / 25 Linear separation For two classes in R d : simple idea: separate the classes
Vehicle Tracking in Occlusion and Clutter
 Vehicle Tracking in Occlusion and Clutter by KURTIS NORMAN MCBRIDE A thesis presented to the University of Waterloo in fulfilment of the thesis requirement for the degree of Master of Applied Science in
Vehicle Tracking in Occlusion and Clutter by KURTIS NORMAN MCBRIDE A thesis presented to the University of Waterloo in fulfilment of the thesis requirement for the degree of Master of Applied Science in
MATH 10: Elementary Statistics and Probability Chapter 5: Continuous Random Variables
 MATH 10: Elementary Statistics and Probability Chapter 5: Continuous Random Variables Tony Pourmohamad Department of Mathematics De Anza College Spring 2015 Objectives By the end of this set of slides,
MATH 10: Elementary Statistics and Probability Chapter 5: Continuous Random Variables Tony Pourmohamad Department of Mathematics De Anza College Spring 2015 Objectives By the end of this set of slides,
Tracking in flussi video 3D. Ing. Samuele Salti
 Seminari XXIII ciclo Tracking in flussi video 3D Ing. Tutors: Prof. Tullio Salmon Cinotti Prof. Luigi Di Stefano The Tracking problem Detection Object model, Track initiation, Track termination, Tracking
Seminari XXIII ciclo Tracking in flussi video 3D Ing. Tutors: Prof. Tullio Salmon Cinotti Prof. Luigi Di Stefano The Tracking problem Detection Object model, Track initiation, Track termination, Tracking
Software and Hardware Solutions for Accurate Data and Profitable Operations. Miguel J. Donald J. Chmielewski Contributor. DuyQuang Nguyen Tanth
 Smart Process Plants Software and Hardware Solutions for Accurate Data and Profitable Operations Miguel J. Bagajewicz, Ph.D. University of Oklahoma Donald J. Chmielewski Contributor DuyQuang Nguyen Tanth
Smart Process Plants Software and Hardware Solutions for Accurate Data and Profitable Operations Miguel J. Bagajewicz, Ph.D. University of Oklahoma Donald J. Chmielewski Contributor DuyQuang Nguyen Tanth
Theory versus Experiment. Prof. Jorgen D Hondt Vrije Universiteit Brussel jodhondt@vub.ac.be
 Theory versus Experiment Prof. Jorgen D Hondt Vrije Universiteit Brussel jodhondt@vub.ac.be Theory versus Experiment Pag. 2 Dangerous cocktail!!! Pag. 3 The basics in these lectures Part1 : Theory meets
Theory versus Experiment Prof. Jorgen D Hondt Vrije Universiteit Brussel jodhondt@vub.ac.be Theory versus Experiment Pag. 2 Dangerous cocktail!!! Pag. 3 The basics in these lectures Part1 : Theory meets
Statistics 104: Section 6!
 Page 1 Statistics 104: Section 6! TF: Deirdre (say: Dear-dra) Bloome Email: dbloome@fas.harvard.edu Section Times Thursday 2pm-3pm in SC 109, Thursday 5pm-6pm in SC 705 Office Hours: Thursday 6pm-7pm SC
Page 1 Statistics 104: Section 6! TF: Deirdre (say: Dear-dra) Bloome Email: dbloome@fas.harvard.edu Section Times Thursday 2pm-3pm in SC 109, Thursday 5pm-6pm in SC 705 Office Hours: Thursday 6pm-7pm SC
Dealing with large datasets
 Dealing with large datasets (by throwing away most of the data) Alan Heavens Institute for Astronomy, University of Edinburgh with Ben Panter, Rob Tweedie, Mark Bastin, Will Hossack, Keith McKellar, Trevor
Dealing with large datasets (by throwing away most of the data) Alan Heavens Institute for Astronomy, University of Edinburgh with Ben Panter, Rob Tweedie, Mark Bastin, Will Hossack, Keith McKellar, Trevor
VARIANCE REDUCTION TECHNIQUES FOR IMPLICIT MONTE CARLO SIMULATIONS
 VARIANCE REDUCTION TECHNIQUES FOR IMPLICIT MONTE CARLO SIMULATIONS An Undergraduate Research Scholars Thesis by JACOB TAYLOR LANDMAN Submitted to Honors and Undergraduate Research Texas A&M University
VARIANCE REDUCTION TECHNIQUES FOR IMPLICIT MONTE CARLO SIMULATIONS An Undergraduate Research Scholars Thesis by JACOB TAYLOR LANDMAN Submitted to Honors and Undergraduate Research Texas A&M University
Lecture 6: Discrete & Continuous Probability and Random Variables
 Lecture 6: Discrete & Continuous Probability and Random Variables D. Alex Hughes Math Camp September 17, 2015 D. Alex Hughes (Math Camp) Lecture 6: Discrete & Continuous Probability and Random September
Lecture 6: Discrete & Continuous Probability and Random Variables D. Alex Hughes Math Camp September 17, 2015 D. Alex Hughes (Math Camp) Lecture 6: Discrete & Continuous Probability and Random September
A Movement Tracking Management Model with Kalman Filtering Global Optimization Techniques and Mahalanobis Distance
 Loutraki, 21 26 October 2005 A Movement Tracking Management Model with ing Global Optimization Techniques and Raquel Ramos Pinho, João Manuel R. S. Tavares, Miguel Velhote Correia Laboratório de Óptica
Loutraki, 21 26 October 2005 A Movement Tracking Management Model with ing Global Optimization Techniques and Raquel Ramos Pinho, João Manuel R. S. Tavares, Miguel Velhote Correia Laboratório de Óptica
PARTICLE FILTERING UNDER COMMUNICATIONS CONSTRAINTS
 PARTICLE FILTERING UNDER COMMUNICATIONS CONSTRAINTS Alexander T. Ihler Donald Brin School of Info. & Comp. Sci. U.C. Irvine, Irvine, CA 92697-3425 John W. Fisher III, Alan S. Willsky Massachusetts Institute
PARTICLE FILTERING UNDER COMMUNICATIONS CONSTRAINTS Alexander T. Ihler Donald Brin School of Info. & Comp. Sci. U.C. Irvine, Irvine, CA 92697-3425 John W. Fisher III, Alan S. Willsky Massachusetts Institute
Robotic Mapping: A Survey
 Robotic Mapping: A Survey Sebastian Thrun February 2002 CMU-CS-02-111 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract This article provides a comprehensive introduction
Robotic Mapping: A Survey Sebastian Thrun February 2002 CMU-CS-02-111 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract This article provides a comprehensive introduction
Two Topics in Parametric Integration Applied to Stochastic Simulation in Industrial Engineering
 Two Topics in Parametric Integration Applied to Stochastic Simulation in Industrial Engineering Department of Industrial Engineering and Management Sciences Northwestern University September 15th, 2014
Two Topics in Parametric Integration Applied to Stochastic Simulation in Industrial Engineering Department of Industrial Engineering and Management Sciences Northwestern University September 15th, 2014