Optical Flow. Shenlong Wang CSC2541 Course Presentation Feb 2, 2016
|
|
|
- Barnard Flynn
- 7 years ago
- Views:
Transcription
1 Optical Flow Shenlong Wang CSC2541 Course Presentation Feb 2, 2016
2 Outline Introduction Variation Models Feature Matching Methods End-to-end Learning based Methods Discussion
3 Optical Flow Goal: Pixel motion from Image 1 to Image 2 Image credit: KITTI
4 Optical Flow Goal: Pixel motion from Image 1 to Image 2 Image credit: KITTI
5 Optical Flow Goal: Pixel motion from Image I to Image H Image credit: KITTI
6 Example Goal: Pixel motion from Image I to Image H Image credit: KITTI
7 Why Optical Flow is Important? We live in a moving world Image credit: giphy.com
8 Why Optical Flow is Important? Recognize actions in video Image credit: Simonyan et al.
9 Why Optical Flow is Important? Velocity/depth of imperceptible air motion Video credit: Xue et al.
10 Optical Flow for Autonomous Driving Tracking motion of objects
11 Optical Flow for Autonomous Driving Tracking motion of objects Image credit: Geiger et al.
12 Optical Flow for Autonomous Driving Estimate the motion of the car itself Image credit: Geiger et al.
13 How does it generate? Motion of the object + Motion of the camera Zoom out Zoom in Pan right to left Image credit: S. Seitz.


14 Motion Field The motion field is the projection of the 3D scene motion into the image. Image credit: S. Seitz.
15 Motion Field The motion field is the projection of the 3D scene motion into the image. Image credit: S. Seitz.
16 Why Optical Flow is Difficult? Illumination change Scale change Large Displacement Occlusion Transparent and reflective Repetitive structure Aperture problem Small objects Image credit: KITTI

17 Why Optical Flow is Difficult? Illumination change Scale change Large Displacement Occlusion Transparent and reflective Repetitive structure Aperture problem Small objects Image credit: Sintel


18 Why Optical Flow is Difficult? Illumination change Scale change Large Displacement Occlusion Transparent and reflective Repetitive structure Aperture problem Small objects Image credit: Sintel
19 Why Optical Flow is Difficult? Illumination change Scale change Large Displacement Occlusion Transparent and reflective Repetitive structure Aperture problem Small objects Perceived motion Actual motion
20 Key Assumptions Consistency: Corresponding points look similar Small motion: Points do not move very far Smoothness: Motion is locally smooth and consistent
21 Color Consistency Brightness Constancy Equation: ), ( 1),, ( ),, ( ), ( t y x y x v y u x I t y x I ), ( ), ( ),, ( 1),, ( y x v I y x u I t y x I t y x I y x Can be written as: I(x,y,t 1) I(x,y,t) 0 t y x I v I u I So, Quiz1: How do we get that? Quiz2: When the approx. is good?
22 Horn Schunck method So our data term is: And we expect motion should be smooth: Can be solved by Euler-Lagragian Equation:
23 Variation models Essentially design continuous optimization model: But it will generate over-smooth the result: Image credit: Liu et al.
24 Variation models Essentially design continuous optimization model: So people try different smoothness penalty Quiz3: Why some prior works better? Image credit: Sun et al.
25 Variation models Essentially design continuous optimization model: So people try different smoothness penalty Image credit: Sun et al.
26 Two tricks in Sun et al. Coarse-to-fine: handle large displacement Median filtering: de-noise intermediate result Image credit: Sun et al.
27 Coarse-to-fine Median filtering Two tricks in Sun et al. L1 distance of u,v between neighboring pixels Total variation (TV-L1) / Nonlocal TV-L1 Although convex, minimization is not trivial Many PhD students (>100) have suffered from this Sun et al. used auxiliary variable for minimization Latest best method is called Primal-dual method C Zach 2007 A Chambolle and T Pock 2011
28 Anisotropic weight Weighting the penalty by color/spatial distance
29 Results
30 Quantitative Results Flow metric: Outlier percentage (> 3 pixel) End point error
31 Summary of Variation Models Data term + smoothness term MAP Inference for continuous Markov random field Some tricks help Choosing a better smoothness term Further extensions: Adopting state-of-the-art optimizers Learning high-order smoothness regularization
32 What we haven t covered? Data term! Underlying assumption: Gaussian observation noise Color consistent across images None of them are perfect Try to warp the image with GT flow and compute the empirical distribution of the errors We also need a robust data term
33 LDOF (Brox & Malik) We might need robust data term: Features should be more invariant than color: HOG, SIFT, DAISY, Census, Walsh-Hamardard Maybe track sparse features? No need to work on ambiguous regions (smooth, line) We track sparse matching and propagate.
34 Global Energy: LDOF (Brox & Malik) HOG-like / geometric blur What s difficult? Descriptor matching results are sparse The solution space is discrete What s proposed? Auxiliary descriptor matching variable w_1 Only compute matching energy for sparse points
35 Global Energy: LDOF (Brox & Malik) HOG-like / geometric blur What s difficult? Descriptor matching results are sparse The solution space is discrete What s proposed? Auxiliary descriptor matching variable w_1 Only compute matching energy for sparse points
36 Matching Energy: LDOF (Brox & Malik) Whether there is a feature matching How much we believe the descriptor matching Flow should be close to feature matching result Optimization: Discrete feature matching firstly Continuous flow secondly
37 Matching Energy: LDOF (Brox & Malik) Whether there is a feature matching How much we believe the descriptor matching Flow should be close to feature matching result Optimization: Discrete feature matching firstly Continuous flow secondly
38 Quantitative Results Flow metric: Average angular error
39 Qualitative Results
40 End-to-end Learning Convolutional neural network! Orz Classification Detection Segmentation Boundary Stereo Action Depth Enhancing
41 End-to-end Learning Hmm Orz Classification Detection Segmentation Boundary Stereo Action Depth Enhancing Flow? Not yet
42 End-to-end Learning Two choice: Stack them together Adding a correlation layer
43 End-to-end Learning Difficulties: Output is per-pixel prediction (proved to work) It is about matching between images Lack of labeled data (critical!) Difficult to transfer knowledge from other tasks/dataset Solutions: Full convolutional architecture + up-sampling layer Stack channels / Correlation layer Trained on Synthetic data Fine-tuned on Sintel, transfer to real-world datasets
44 Flying datasets Dataset configuration Flying chair rendered with 3D shapes Background: static image with affine transform Add some noise Rendering out flow result
45 Qualitative Results
46 Qualitative Results
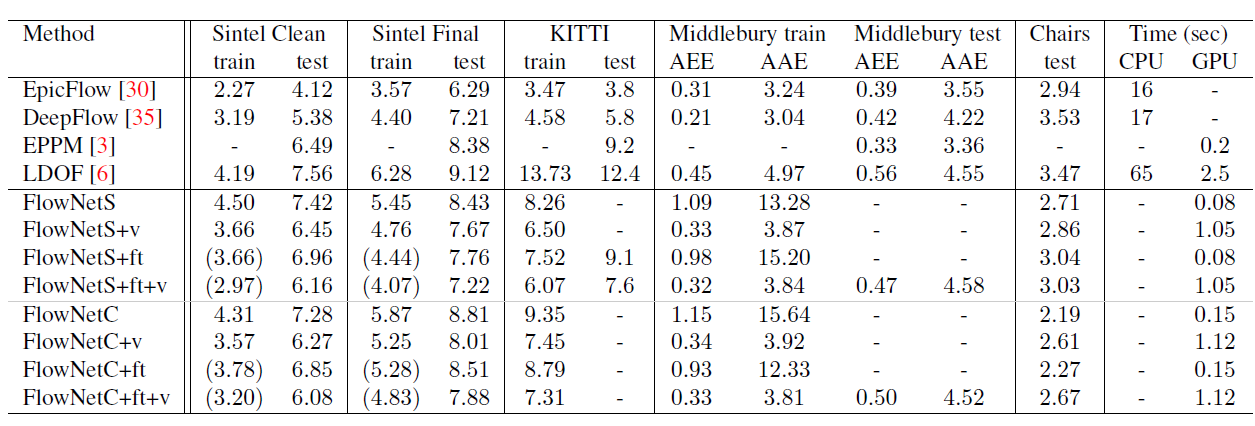
47 Quantitative Results
Feature Tracking and Optical Flow
 02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
Object tracking & Motion detection in video sequences
 Introduction Object tracking & Motion detection in video sequences Recomended link: http://cmp.felk.cvut.cz/~hlavac/teachpresen/17compvision3d/41imagemotion.pdf 1 2 DYNAMIC SCENE ANALYSIS The input to
Introduction Object tracking & Motion detection in video sequences Recomended link: http://cmp.felk.cvut.cz/~hlavac/teachpresen/17compvision3d/41imagemotion.pdf 1 2 DYNAMIC SCENE ANALYSIS The input to
Bildverarbeitung und Mustererkennung Image Processing and Pattern Recognition
 Bildverarbeitung und Mustererkennung Image Processing and Pattern Recognition 1. Image Pre-Processing - Pixel Brightness Transformation - Geometric Transformation - Image Denoising 1 1. Image Pre-Processing
Bildverarbeitung und Mustererkennung Image Processing and Pattern Recognition 1. Image Pre-Processing - Pixel Brightness Transformation - Geometric Transformation - Image Denoising 1 1. Image Pre-Processing
Practical Tour of Visual tracking. David Fleet and Allan Jepson January, 2006
 Practical Tour of Visual tracking David Fleet and Allan Jepson January, 2006 Designing a Visual Tracker: What is the state? pose and motion (position, velocity, acceleration, ) shape (size, deformation,
Practical Tour of Visual tracking David Fleet and Allan Jepson January, 2006 Designing a Visual Tracker: What is the state? pose and motion (position, velocity, acceleration, ) shape (size, deformation,
A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow
 , pp.233-237 http://dx.doi.org/10.14257/astl.2014.51.53 A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow Giwoo Kim 1, Hye-Youn Lim 1 and Dae-Seong Kang 1, 1 Department of electronices
, pp.233-237 http://dx.doi.org/10.14257/astl.2014.51.53 A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow Giwoo Kim 1, Hye-Youn Lim 1 and Dae-Seong Kang 1, 1 Department of electronices
Assessment. Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall
 Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
The Visual Internet of Things System Based on Depth Camera
 The Visual Internet of Things System Based on Depth Camera Xucong Zhang 1, Xiaoyun Wang and Yingmin Jia Abstract The Visual Internet of Things is an important part of information technology. It is proposed
The Visual Internet of Things System Based on Depth Camera Xucong Zhang 1, Xiaoyun Wang and Yingmin Jia Abstract The Visual Internet of Things is an important part of information technology. It is proposed
Online Learning for Fast Segmentation of Moving Objects
 Online Learning for Fast Segmentation of Moving Objects Liam Ellis, Vasileios Zografos {liam.ellis,vasileios.zografos}@liu.se CVL, Linköping University, Linköping, Sweden Abstract. This work addresses
Online Learning for Fast Segmentation of Moving Objects Liam Ellis, Vasileios Zografos {liam.ellis,vasileios.zografos}@liu.se CVL, Linköping University, Linköping, Sweden Abstract. This work addresses
Automatic Labeling of Lane Markings for Autonomous Vehicles
 Automatic Labeling of Lane Markings for Autonomous Vehicles Jeffrey Kiske Stanford University 450 Serra Mall, Stanford, CA 94305 jkiske@stanford.edu 1. Introduction As autonomous vehicles become more popular,
Automatic Labeling of Lane Markings for Autonomous Vehicles Jeffrey Kiske Stanford University 450 Serra Mall, Stanford, CA 94305 jkiske@stanford.edu 1. Introduction As autonomous vehicles become more popular,
Tracking of Small Unmanned Aerial Vehicles
 Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: spk170@stanford.edu Aeronautics and Astronautics Stanford
Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: spk170@stanford.edu Aeronautics and Astronautics Stanford
ACE: After Effects CC
 Adobe Training Services Exam Guide ACE: After Effects CC Adobe Training Services provides this exam guide to help prepare partners, customers, and consultants who are actively seeking accreditation as
Adobe Training Services Exam Guide ACE: After Effects CC Adobe Training Services provides this exam guide to help prepare partners, customers, and consultants who are actively seeking accreditation as
MOTION DETECTION FOR PC BASED SECURITY SYSTEM BY USING OPTICAL FLOW NUR NABILAH BT MOHAMAD HAMID
 MOTION DETECTION FOR PC BASED SECURITY SYSTEM BY USING OPTICAL FLOW NUR NABILAH BT MOHAMAD HAMID This thesis is submitted as partial fulfillment of the requirement for the award of the Bachelor of Electrical
MOTION DETECTION FOR PC BASED SECURITY SYSTEM BY USING OPTICAL FLOW NUR NABILAH BT MOHAMAD HAMID This thesis is submitted as partial fulfillment of the requirement for the award of the Bachelor of Electrical
Edge tracking for motion segmentation and depth ordering
 Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
Tracking in flussi video 3D. Ing. Samuele Salti
 Seminari XXIII ciclo Tracking in flussi video 3D Ing. Tutors: Prof. Tullio Salmon Cinotti Prof. Luigi Di Stefano The Tracking problem Detection Object model, Track initiation, Track termination, Tracking
Seminari XXIII ciclo Tracking in flussi video 3D Ing. Tutors: Prof. Tullio Salmon Cinotti Prof. Luigi Di Stefano The Tracking problem Detection Object model, Track initiation, Track termination, Tracking
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER
 ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
Probabilistic Latent Semantic Analysis (plsa)
") Probabilistic Latent Semantic Analysis (plsa) SS 2008 Bayesian Networks Multimedia Computing, Universität Augsburg Rainer.Lienhart@informatik.uni-augsburg.de www.multimedia-computing.{de,org} References
Probabilistic Latent Semantic Analysis (plsa) SS 2008 Bayesian Networks Multimedia Computing, Universität Augsburg Rainer.Lienhart@informatik.uni-augsburg.de www.multimedia-computing.{de,org} References
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA
 A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA N. Zarrinpanjeh a, F. Dadrassjavan b, H. Fattahi c * a Islamic Azad University of Qazvin - nzarrin@qiau.ac.ir
A PHOTOGRAMMETRIC APPRAOCH FOR AUTOMATIC TRAFFIC ASSESSMENT USING CONVENTIONAL CCTV CAMERA N. Zarrinpanjeh a, F. Dadrassjavan b, H. Fattahi c * a Islamic Azad University of Qazvin - nzarrin@qiau.ac.ir
A Duality Based Algorithm for TV-L 1 -Optical-Flow Image Registration
 A Duality Based Algorithm for TV-L 1 -Optical-Flow Image Registration Thomas Pock 1, Martin Urschler 1, Christopher Zach 2, Reinhard Beichel 3, and Horst Bischof 1 1 Institute for Computer Graphics & Vision,
A Duality Based Algorithm for TV-L 1 -Optical-Flow Image Registration Thomas Pock 1, Martin Urschler 1, Christopher Zach 2, Reinhard Beichel 3, and Horst Bischof 1 1 Institute for Computer Graphics & Vision,
Deferred Shading & Screen Space Effects
 Deferred Shading & Screen Space Effects State of the Art Rendering Techniques used in the 3D Games Industry Sebastian Lehmann 11. Februar 2014 FREESTYLE PROJECT GRAPHICS PROGRAMMING LAB CHAIR OF COMPUTER
Deferred Shading & Screen Space Effects State of the Art Rendering Techniques used in the 3D Games Industry Sebastian Lehmann 11. Februar 2014 FREESTYLE PROJECT GRAPHICS PROGRAMMING LAB CHAIR OF COMPUTER
Vision based Vehicle Tracking using a high angle camera
 Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu gramos@clemson.edu dshu@clemson.edu Abstract A vehicle tracking and grouping algorithm is presented in this work
Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu gramos@clemson.edu dshu@clemson.edu Abstract A vehicle tracking and grouping algorithm is presented in this work
EECS 556 Image Processing W 09. Interpolation. Interpolation techniques B splines
 EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
INTRODUCTION TO RENDERING TECHNIQUES
 INTRODUCTION TO RENDERING TECHNIQUES 22 Mar. 212 Yanir Kleiman What is 3D Graphics? Why 3D? Draw one frame at a time Model only once X 24 frames per second Color / texture only once 15, frames for a feature
INTRODUCTION TO RENDERING TECHNIQUES 22 Mar. 212 Yanir Kleiman What is 3D Graphics? Why 3D? Draw one frame at a time Model only once X 24 frames per second Color / texture only once 15, frames for a feature
Convolution. 1D Formula: 2D Formula: Example on the web: http://www.jhu.edu/~signals/convolve/
 Basic Filters (7) Convolution/correlation/Linear filtering Gaussian filters Smoothing and noise reduction First derivatives of Gaussian Second derivative of Gaussian: Laplacian Oriented Gaussian filters
Basic Filters (7) Convolution/correlation/Linear filtering Gaussian filters Smoothing and noise reduction First derivatives of Gaussian Second derivative of Gaussian: Laplacian Oriented Gaussian filters
BCC Multi Stripe Wipe
 BCC Multi Stripe Wipe The BCC Multi Stripe Wipe is a similar to a Horizontal or Vertical Blind wipe. It offers extensive controls to randomize the stripes parameters. The following example shows a Multi
BCC Multi Stripe Wipe The BCC Multi Stripe Wipe is a similar to a Horizontal or Vertical Blind wipe. It offers extensive controls to randomize the stripes parameters. The following example shows a Multi
Crater detection with segmentation-based image processing algorithm
 Template reference : 100181708K-EN Crater detection with segmentation-based image processing algorithm M. Spigai, S. Clerc (Thales Alenia Space-France) V. Simard-Bilodeau (U. Sherbrooke and NGC Aerospace,
Template reference : 100181708K-EN Crater detection with segmentation-based image processing algorithm M. Spigai, S. Clerc (Thales Alenia Space-France) V. Simard-Bilodeau (U. Sherbrooke and NGC Aerospace,
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite
 Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Numerical Methods For Image Restoration
 Numerical Methods For Image Restoration CIRAM Alessandro Lanza University of Bologna, Italy Faculty of Engineering CIRAM Outline 1. Image Restoration as an inverse problem 2. Image degradation models:
Numerical Methods For Image Restoration CIRAM Alessandro Lanza University of Bologna, Italy Faculty of Engineering CIRAM Outline 1. Image Restoration as an inverse problem 2. Image degradation models:
The Limits of Human Vision
 The Limits of Human Vision Michael F. Deering Sun Microsystems ABSTRACT A model of the perception s of the human visual system is presented, resulting in an estimate of approximately 15 million variable
The Limits of Human Vision Michael F. Deering Sun Microsystems ABSTRACT A model of the perception s of the human visual system is presented, resulting in an estimate of approximately 15 million variable
Colorado School of Mines Computer Vision Professor William Hoff
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Local features and matching. Image classification & object localization
 Overview Instance level search Local features and matching Efficient visual recognition Image classification & object localization Category recognition Image classification: assigning a class label to
Overview Instance level search Local features and matching Efficient visual recognition Image classification & object localization Category recognition Image classification: assigning a class label to
Visualization and Feature Extraction, FLOW Spring School 2016 Prof. Dr. Tino Weinkauf. Flow Visualization. Image-Based Methods (integration-based)
") Visualization and Feature Extraction, FLOW Spring School 2016 Prof. Dr. Tino Weinkauf Flow Visualization Image-Based Methods (integration-based) Spot Noise (Jarke van Wijk, Siggraph 1991) Flow Visualization:
Visualization and Feature Extraction, FLOW Spring School 2016 Prof. Dr. Tino Weinkauf Flow Visualization Image-Based Methods (integration-based) Spot Noise (Jarke van Wijk, Siggraph 1991) Flow Visualization:
Color Segmentation Based Depth Image Filtering
 Color Segmentation Based Depth Image Filtering Michael Schmeing and Xiaoyi Jiang Department of Computer Science, University of Münster Einsteinstraße 62, 48149 Münster, Germany, {m.schmeing xjiang}@uni-muenster.de
Color Segmentation Based Depth Image Filtering Michael Schmeing and Xiaoyi Jiang Department of Computer Science, University of Münster Einsteinstraße 62, 48149 Münster, Germany, {m.schmeing xjiang}@uni-muenster.de
ACE: After Effects CS6
 Adobe Training Services Exam Guide ACE: After Effects CS6 Adobe Training Services provides this exam guide to help prepare partners, customers, and consultants who are actively seeking accreditation as
Adobe Training Services Exam Guide ACE: After Effects CS6 Adobe Training Services provides this exam guide to help prepare partners, customers, and consultants who are actively seeking accreditation as
ARC 3D Webservice How to transform your images into 3D models. Maarten Vergauwen info@arc3d.be
 ARC 3D Webservice How to transform your images into 3D models Maarten Vergauwen info@arc3d.be Overview What is it? How does it work? How do you use it? How to record images? Problems, tips and tricks Overview
ARC 3D Webservice How to transform your images into 3D models Maarten Vergauwen info@arc3d.be Overview What is it? How does it work? How do you use it? How to record images? Problems, tips and tricks Overview
ACCURACY ASSESSMENT OF BUILDING POINT CLOUDS AUTOMATICALLY GENERATED FROM IPHONE IMAGES
 ACCURACY ASSESSMENT OF BUILDING POINT CLOUDS AUTOMATICALLY GENERATED FROM IPHONE IMAGES B. Sirmacek, R. Lindenbergh Delft University of Technology, Department of Geoscience and Remote Sensing, Stevinweg
ACCURACY ASSESSMENT OF BUILDING POINT CLOUDS AUTOMATICALLY GENERATED FROM IPHONE IMAGES B. Sirmacek, R. Lindenbergh Delft University of Technology, Department of Geoscience and Remote Sensing, Stevinweg
Alignment and Preprocessing for Data Analysis
 Alignment and Preprocessing for Data Analysis Preprocessing tools for chromatography Basics of alignment GC FID (D) data and issues PCA F Ratios GC MS (D) data and issues PCA F Ratios PARAFAC Piecewise
Alignment and Preprocessing for Data Analysis Preprocessing tools for chromatography Basics of alignment GC FID (D) data and issues PCA F Ratios GC MS (D) data and issues PCA F Ratios PARAFAC Piecewise
Camera Technology Guide. Factors to consider when selecting your video surveillance cameras
 Camera Technology Guide Factors to consider when selecting your video surveillance cameras Introduction Investing in a video surveillance system is a smart move. You have many assets to protect so you
Camera Technology Guide Factors to consider when selecting your video surveillance cameras Introduction Investing in a video surveillance system is a smart move. You have many assets to protect so you
Edge-based Template Matching and Tracking for Perspectively Distorted Planar Objects
 Edge-based Template Matching and Tracking for Perspectively Distorted Planar Objects Andreas Hofhauser, Carsten Steger, and Nassir Navab TU München, Boltzmannstr. 3, 85748 Garching bei München, Germany
Edge-based Template Matching and Tracking for Perspectively Distorted Planar Objects Andreas Hofhauser, Carsten Steger, and Nassir Navab TU München, Boltzmannstr. 3, 85748 Garching bei München, Germany
Mean-Shift Tracking with Random Sampling
 1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
Traffic Flow Monitoring in Crowded Cities
 Traffic Flow Monitoring in Crowded Cities John A. Quinn and Rose Nakibuule Faculty of Computing & I.T. Makerere University P.O. Box 7062, Kampala, Uganda {jquinn,rnakibuule}@cit.mak.ac.ug Abstract Traffic
Traffic Flow Monitoring in Crowded Cities John A. Quinn and Rose Nakibuule Faculty of Computing & I.T. Makerere University P.O. Box 7062, Kampala, Uganda {jquinn,rnakibuule}@cit.mak.ac.ug Abstract Traffic
CHAPTER 5 PREDICTIVE MODELING STUDIES TO DETERMINE THE CONVEYING VELOCITY OF PARTS ON VIBRATORY FEEDER
 93 CHAPTER 5 PREDICTIVE MODELING STUDIES TO DETERMINE THE CONVEYING VELOCITY OF PARTS ON VIBRATORY FEEDER 5.1 INTRODUCTION The development of an active trap based feeder for handling brakeliners was discussed
93 CHAPTER 5 PREDICTIVE MODELING STUDIES TO DETERMINE THE CONVEYING VELOCITY OF PARTS ON VIBRATORY FEEDER 5.1 INTRODUCTION The development of an active trap based feeder for handling brakeliners was discussed
IMPLICIT SHAPE MODELS FOR OBJECT DETECTION IN 3D POINT CLOUDS
 IMPLICIT SHAPE MODELS FOR OBJECT DETECTION IN 3D POINT CLOUDS Alexander Velizhev 1 (presenter) Roman Shapovalov 2 Konrad Schindler 3 1 Hexagon Technology Center, Heerbrugg, Switzerland 2 Graphics & Media
IMPLICIT SHAPE MODELS FOR OBJECT DETECTION IN 3D POINT CLOUDS Alexander Velizhev 1 (presenter) Roman Shapovalov 2 Konrad Schindler 3 1 Hexagon Technology Center, Heerbrugg, Switzerland 2 Graphics & Media
The Scientific Data Mining Process
 Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Cees Snoek. Machine. Humans. Multimedia Archives. Euvision Technologies The Netherlands. University of Amsterdam The Netherlands. Tree.
 Visual search: what's next? Cees Snoek University of Amsterdam The Netherlands Euvision Technologies The Netherlands Problem statement US flag Tree Aircraft Humans Dog Smoking Building Basketball Table
Visual search: what's next? Cees Snoek University of Amsterdam The Netherlands Euvision Technologies The Netherlands Problem statement US flag Tree Aircraft Humans Dog Smoking Building Basketball Table
Multispectral stereo acquisition using 2 RGB cameras and color filters: color and disparity accuracy
 Multispectral stereo acquisition using 2 RGB cameras and color filters: color and disparity accuracy (a) and Bernhard Hill (b) (a) Institute of Imaging and Computer Vision (b) Research Group Color and
Multispectral stereo acquisition using 2 RGB cameras and color filters: color and disparity accuracy (a) and Bernhard Hill (b) (a) Institute of Imaging and Computer Vision (b) Research Group Color and
OBJECT TRACKING USING LOG-POLAR TRANSFORMATION
 OBJECT TRACKING USING LOG-POLAR TRANSFORMATION A Thesis Submitted to the Gradual Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements
OBJECT TRACKING USING LOG-POLAR TRANSFORMATION A Thesis Submitted to the Gradual Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements
Super-Resolution for Traditional and Omnidirectional Image Sequences
 Acta Polytechnica Hungarica Vol. 6, No. 1, 2009 Super-Resolution for Traditional and Omnidirectional Image Sequences Attila Nagy, Zoltán Vámossy Institute of Software Technology, John von Neumann Faculty
Acta Polytechnica Hungarica Vol. 6, No. 1, 2009 Super-Resolution for Traditional and Omnidirectional Image Sequences Attila Nagy, Zoltán Vámossy Institute of Software Technology, John von Neumann Faculty
Motion Capture Sistemi a marker passivi
 Motion Capture Sistemi a marker passivi N. Alberto Borghese Laboratory of Human Motion Analysis and Virtual Reality (MAVR) Department of Computer Science University of Milano 1/41 Outline Introduction:
Motion Capture Sistemi a marker passivi N. Alberto Borghese Laboratory of Human Motion Analysis and Virtual Reality (MAVR) Department of Computer Science University of Milano 1/41 Outline Introduction:
VECTORAL IMAGING THE NEW DIRECTION IN AUTOMATED OPTICAL INSPECTION
 VECTORAL IMAGING THE NEW DIRECTION IN AUTOMATED OPTICAL INSPECTION Mark J. Norris Vision Inspection Technology, LLC Haverhill, MA mnorris@vitechnology.com ABSTRACT Traditional methods of identifying and
VECTORAL IMAGING THE NEW DIRECTION IN AUTOMATED OPTICAL INSPECTION Mark J. Norris Vision Inspection Technology, LLC Haverhill, MA mnorris@vitechnology.com ABSTRACT Traditional methods of identifying and
Automatic Restoration Algorithms for 35mm film
 P. Schallauer, A. Pinz, W. Haas. Automatic Restoration Algorithms for 35mm film. To be published in Videre, Journal of Computer Vision Research, web: http://mitpress.mit.edu/videre.html, 1999. Automatic
P. Schallauer, A. Pinz, W. Haas. Automatic Restoration Algorithms for 35mm film. To be published in Videre, Journal of Computer Vision Research, web: http://mitpress.mit.edu/videre.html, 1999. Automatic
Multiple Network Marketing coordination Model
 REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
Lecture 12: Cameras and Geometry. CAP 5415 Fall 2010
 Lecture 12: Cameras and Geometry CAP 5415 Fall 2010 The midterm What does the response of a derivative filter tell me about whether there is an edge or not? Things aren't working Did you look at the filters?
Lecture 12: Cameras and Geometry CAP 5415 Fall 2010 The midterm What does the response of a derivative filter tell me about whether there is an edge or not? Things aren't working Did you look at the filters?
3D Object Recognition using Convolutional Neural Networks with Transfer Learning between Input Channels
 3D Object Recognition using Convolutional Neural Networks with Transfer Learning between Input Channels Luís A. Alexandre Department of Informatics and Instituto de Telecomunicações Univ. Beira Interior,
3D Object Recognition using Convolutional Neural Networks with Transfer Learning between Input Channels Luís A. Alexandre Department of Informatics and Instituto de Telecomunicações Univ. Beira Interior,
Automatic Traffic Estimation Using Image Processing
 Automatic Traffic Estimation Using Image Processing Pejman Niksaz Science &Research Branch, Azad University of Yazd, Iran Pezhman_1366@yahoo.com Abstract As we know the population of city and number of
Automatic Traffic Estimation Using Image Processing Pejman Niksaz Science &Research Branch, Azad University of Yazd, Iran Pezhman_1366@yahoo.com Abstract As we know the population of city and number of
Towards License Plate Recognition: Comparying Moving Objects Segmentation Approaches
 1 Towards License Plate Recognition: Comparying Moving Objects Segmentation Approaches V. J. Oliveira-Neto, G. Cámara-Chávez, D. Menotti UFOP - Federal University of Ouro Preto Computing Department Ouro
1 Towards License Plate Recognition: Comparying Moving Objects Segmentation Approaches V. J. Oliveira-Neto, G. Cámara-Chávez, D. Menotti UFOP - Federal University of Ouro Preto Computing Department Ouro
Building an Advanced Invariant Real-Time Human Tracking System
 UDC 004.41 Building an Advanced Invariant Real-Time Human Tracking System Fayez Idris 1, Mazen Abu_Zaher 2, Rashad J. Rasras 3, and Ibrahiem M. M. El Emary 4 1 School of Informatics and Computing, German-Jordanian
UDC 004.41 Building an Advanced Invariant Real-Time Human Tracking System Fayez Idris 1, Mazen Abu_Zaher 2, Rashad J. Rasras 3, and Ibrahiem M. M. El Emary 4 1 School of Informatics and Computing, German-Jordanian
High Quality Image Magnification using Cross-Scale Self-Similarity
 High Quality Image Magnification using Cross-Scale Self-Similarity André Gooßen 1, Arne Ehlers 1, Thomas Pralow 2, Rolf-Rainer Grigat 1 1 Vision Systems, Hamburg University of Technology, D-21079 Hamburg
High Quality Image Magnification using Cross-Scale Self-Similarity André Gooßen 1, Arne Ehlers 1, Thomas Pralow 2, Rolf-Rainer Grigat 1 1 Vision Systems, Hamburg University of Technology, D-21079 Hamburg
Multi-view Intelligent Vehicle Surveillance System
 Multi-view Intelligent Vehicle Surveillance System S. Denman, C. Fookes, J. Cook, C. Davoren, A. Mamic, G. Farquharson, D. Chen, B. Chen and S. Sridharan Image and Video Research Laboratory Queensland
Multi-view Intelligent Vehicle Surveillance System S. Denman, C. Fookes, J. Cook, C. Davoren, A. Mamic, G. Farquharson, D. Chen, B. Chen and S. Sridharan Image and Video Research Laboratory Queensland
Detecting and Tracking Moving Objects for Video Surveillance
 IEEE Proc. Computer Vision and Pattern Recognition Jun. 3-5, 1999. Fort Collins CO Detecting and Tracking Moving Objects for Video Surveillance Isaac Cohen Gérard Medioni University of Southern California
IEEE Proc. Computer Vision and Pattern Recognition Jun. 3-5, 1999. Fort Collins CO Detecting and Tracking Moving Objects for Video Surveillance Isaac Cohen Gérard Medioni University of Southern California
Lecture 6: CNNs for Detection, Tracking, and Segmentation Object Detection
 CSED703R: Deep Learning for Visual Recognition (206S) Lecture 6: CNNs for Detection, Tracking, and Segmentation Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 3 Object detection
CSED703R: Deep Learning for Visual Recognition (206S) Lecture 6: CNNs for Detection, Tracking, and Segmentation Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 3 Object detection
Introduction to Deep Learning Variational Inference, Mean Field Theory
 Introduction to Deep Learning Variational Inference, Mean Field Theory 1 Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris Galen Group INRIA-Saclay Lecture 3: recap
Introduction to Deep Learning Variational Inference, Mean Field Theory 1 Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris Galen Group INRIA-Saclay Lecture 3: recap
Two-Frame Motion Estimation Based on Polynomial Expansion
 Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden gf@isy.liu.se http://www.isy.liu.se/cvl/ Abstract.
Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden gf@isy.liu.se http://www.isy.liu.se/cvl/ Abstract.
White Paper. "See" what is important
 Bear this in mind when selecting a book scanner "See" what is important Books, magazines and historical documents come in hugely different colors, shapes and sizes; for libraries, archives and museums,
Bear this in mind when selecting a book scanner "See" what is important Books, magazines and historical documents come in hugely different colors, shapes and sizes; for libraries, archives and museums,
Digital Imaging and Multimedia. Filters. Ahmed Elgammal Dept. of Computer Science Rutgers University
 Digital Imaging and Multimedia Filters Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What are Filters Linear Filters Convolution operation Properties of Linear Filters Application
Digital Imaging and Multimedia Filters Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What are Filters Linear Filters Convolution operation Properties of Linear Filters Application
The Concept(s) of Mosaic Image Processing. by Fabian Neyer
 of Mosaic Image Processing. by Fabian Neyer") The Concept(s) of Mosaic Image Processing by Fabian Neyer NEAIC 2012 April 27, 2012 Suffern, NY My Background 2003, ST8, AP130 2005, EOS 300D, Borg101 2 2006, mod. EOS20D, Borg101 2010/11, STL11k, Borg101
The Concept(s) of Mosaic Image Processing by Fabian Neyer NEAIC 2012 April 27, 2012 Suffern, NY My Background 2003, ST8, AP130 2005, EOS 300D, Borg101 2 2006, mod. EOS20D, Borg101 2010/11, STL11k, Borg101
Face Recognition in Low-resolution Images by Using Local Zernike Moments
 Proceedings of the International Conference on Machine Vision and Machine Learning Prague, Czech Republic, August14-15, 014 Paper No. 15 Face Recognition in Low-resolution Images by Using Local Zernie
Proceedings of the International Conference on Machine Vision and Machine Learning Prague, Czech Republic, August14-15, 014 Paper No. 15 Face Recognition in Low-resolution Images by Using Local Zernie
A Novel Hole filling method based on Projection onto Convex Set in DIBR
 3rd International Conference on Multimedia Technology ICMT 2013) A Novel Hole filling method based on Projection onto Convex Set in DIBR Weiquan Wang1 and Yingyun Yang2 and Qian Liang3 Abstract. Depth
3rd International Conference on Multimedia Technology ICMT 2013) A Novel Hole filling method based on Projection onto Convex Set in DIBR Weiquan Wang1 and Yingyun Yang2 and Qian Liang3 Abstract. Depth
Classification of Fingerprints. Sarat C. Dass Department of Statistics & Probability
 Classification of Fingerprints Sarat C. Dass Department of Statistics & Probability Fingerprint Classification Fingerprint classification is a coarse level partitioning of a fingerprint database into smaller
Classification of Fingerprints Sarat C. Dass Department of Statistics & Probability Fingerprint Classification Fingerprint classification is a coarse level partitioning of a fingerprint database into smaller
Introduction Epipolar Geometry Calibration Methods Further Readings. Stereo Camera Calibration
 Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration 12.10.2004 Overview Introduction Summary / Motivation Depth Perception Ambiguity of Correspondence
Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration 12.10.2004 Overview Introduction Summary / Motivation Depth Perception Ambiguity of Correspondence
Understanding Compression Technologies for HD and Megapixel Surveillance
 When the security industry began the transition from using VHS tapes to hard disks for video surveillance storage, the question of how to compress and store video became a top consideration for video surveillance
When the security industry began the transition from using VHS tapes to hard disks for video surveillance storage, the question of how to compress and store video became a top consideration for video surveillance
Anime Studio Debut vs. Pro
 vs. Animation Length 2 minutes (3000 frames) Unlimited Motion Tracking 3 Points Unlimited Audio Tracks 2 Tracks Unlimited Video Tracks 1 Track Unlimited Physics No Yes Poser scene import No Yes 3D layer
vs. Animation Length 2 minutes (3000 frames) Unlimited Motion Tracking 3 Points Unlimited Audio Tracks 2 Tracks Unlimited Video Tracks 1 Track Unlimited Physics No Yes Poser scene import No Yes 3D layer
Object Recognition and Template Matching
 Object Recognition and Template Matching Template Matching A template is a small image (sub-image) The goal is to find occurrences of this template in a larger image That is, you want to find matches of
Object Recognition and Template Matching Template Matching A template is a small image (sub-image) The goal is to find occurrences of this template in a larger image That is, you want to find matches of
High speed 3D capture for Configuration Management DOE SBIR Phase II Paul Banks Paul.banks@tetravue.com
 High speed 3D capture for Configuration Management DOE SBIR Phase II Paul Banks Paul.banks@tetravue.com Advanced Methods for Manufacturing Workshop September 29, 2015 1 TetraVue does high resolution 3D
High speed 3D capture for Configuration Management DOE SBIR Phase II Paul Banks Paul.banks@tetravue.com Advanced Methods for Manufacturing Workshop September 29, 2015 1 TetraVue does high resolution 3D
Tracking-Learning-Detection
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 6, NO., JANUARY 200 Tracking-Learning-Detection Zdenek Kalal, Krystian Mikolajczyk, and Jiri Matas, Abstract This paper investigates
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 6, NO., JANUARY 200 Tracking-Learning-Detection Zdenek Kalal, Krystian Mikolajczyk, and Jiri Matas, Abstract This paper investigates
Support Vector Machine (SVM)
") Support Vector Machine (SVM) CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Margin concept Hard-Margin SVM Soft-Margin SVM Dual Problems of Hard-Margin
Support Vector Machine (SVM) CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Margin concept Hard-Margin SVM Soft-Margin SVM Dual Problems of Hard-Margin
FLEXSYS Motion-based Traffic Analysis and Incident Detection
 FLEXSYS Motion-based Traffic Analysis and Incident Detection Authors: Lixin Yang and Hichem Sahli, IBBT/VUB-ETRO Contents.1 Introduction......................................... 1.2 Traffic flow modelling
FLEXSYS Motion-based Traffic Analysis and Incident Detection Authors: Lixin Yang and Hichem Sahli, IBBT/VUB-ETRO Contents.1 Introduction......................................... 1.2 Traffic flow modelling
CHAPTER 6 TEXTURE ANIMATION
 CHAPTER 6 TEXTURE ANIMATION 6.1. INTRODUCTION Animation is the creating of a timed sequence or series of graphic images or frames together to give the appearance of continuous movement. A collection of
CHAPTER 6 TEXTURE ANIMATION 6.1. INTRODUCTION Animation is the creating of a timed sequence or series of graphic images or frames together to give the appearance of continuous movement. A collection of
Applications of Deep Learning to the GEOINT mission. June 2015
 Applications of Deep Learning to the GEOINT mission June 2015 Overview Motivation Deep Learning Recap GEOINT applications: Imagery exploitation OSINT exploitation Geospatial and activity based analytics
Applications of Deep Learning to the GEOINT mission June 2015 Overview Motivation Deep Learning Recap GEOINT applications: Imagery exploitation OSINT exploitation Geospatial and activity based analytics
Face Recognition For Remote Database Backup System
 Face Recognition For Remote Database Backup System Aniza Mohamed Din, Faudziah Ahmad, Mohamad Farhan Mohamad Mohsin, Ku Ruhana Ku-Mahamud, Mustafa Mufawak Theab 2 Graduate Department of Computer Science,UUM
Face Recognition For Remote Database Backup System Aniza Mohamed Din, Faudziah Ahmad, Mohamad Farhan Mohamad Mohsin, Ku Ruhana Ku-Mahamud, Mustafa Mufawak Theab 2 Graduate Department of Computer Science,UUM
Incremental Surface Extraction from Sparse Structure-from-Motion Point Clouds
 HOPPE, KLOPSCHITZ, DONOSER, BISCHOF: INCREMENTAL SURFACE EXTRACTION 1 Incremental Surface Extraction from Sparse Structure-from-Motion Point Clouds Christof Hoppe 1 hoppe@icg.tugraz.at Manfred Klopschitz
HOPPE, KLOPSCHITZ, DONOSER, BISCHOF: INCREMENTAL SURFACE EXTRACTION 1 Incremental Surface Extraction from Sparse Structure-from-Motion Point Clouds Christof Hoppe 1 hoppe@icg.tugraz.at Manfred Klopschitz
False alarm in outdoor environments
 Accepted 1.0 Savantic letter 1(6) False alarm in outdoor environments Accepted 1.0 Savantic letter 2(6) Table of contents Revision history 3 References 3 1 Introduction 4 2 Pre-processing 4 3 Detection,
Accepted 1.0 Savantic letter 1(6) False alarm in outdoor environments Accepted 1.0 Savantic letter 2(6) Table of contents Revision history 3 References 3 1 Introduction 4 2 Pre-processing 4 3 Detection,
C-nario Cube. June, 2008
 C-nario Cube Infinitely Scalable Pixel-Perfect Multi- Display System June, 2008 C-nario Cube The only video wall processor combined with digital signage software for remote management, content creation
C-nario Cube Infinitely Scalable Pixel-Perfect Multi- Display System June, 2008 C-nario Cube The only video wall processor combined with digital signage software for remote management, content creation
A Prototype For Eye-Gaze Corrected
 A Prototype For Eye-Gaze Corrected Video Chat on Graphics Hardware Maarten Dumont, Steven Maesen, Sammy Rogmans and Philippe Bekaert Introduction Traditional webcam video chat: No eye contact. No extensive
A Prototype For Eye-Gaze Corrected Video Chat on Graphics Hardware Maarten Dumont, Steven Maesen, Sammy Rogmans and Philippe Bekaert Introduction Traditional webcam video chat: No eye contact. No extensive
Recognition. Sanja Fidler CSC420: Intro to Image Understanding 1 / 28
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) History of recognition techniques Object classification Bag-of-words Spatial pyramids Neural Networks Object
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) History of recognition techniques Object classification Bag-of-words Spatial pyramids Neural Networks Object
Randomized Trees for Real-Time Keypoint Recognition
 Randomized Trees for Real-Time Keypoint Recognition Vincent Lepetit Pascal Lagger Pascal Fua Computer Vision Laboratory École Polytechnique Fédérale de Lausanne (EPFL) 1015 Lausanne, Switzerland Email:
Randomized Trees for Real-Time Keypoint Recognition Vincent Lepetit Pascal Lagger Pascal Fua Computer Vision Laboratory École Polytechnique Fédérale de Lausanne (EPFL) 1015 Lausanne, Switzerland Email:
Object Segmentation by Long Term Analysis of Point Trajectories
 Object Segmentation by Long Term Analysis of Point Trajectories Thomas Brox 1,2 and Jitendra Malik 1 1 University of California at Berkeley 2 Albert-Ludwigs-University of Freiburg, Germany {brox,malik}@eecs.berkeley.edu
Object Segmentation by Long Term Analysis of Point Trajectories Thomas Brox 1,2 and Jitendra Malik 1 1 University of California at Berkeley 2 Albert-Ludwigs-University of Freiburg, Germany {brox,malik}@eecs.berkeley.edu
COMPARISON OF OBJECT BASED AND PIXEL BASED CLASSIFICATION OF HIGH RESOLUTION SATELLITE IMAGES USING ARTIFICIAL NEURAL NETWORKS
 COMPARISON OF OBJECT BASED AND PIXEL BASED CLASSIFICATION OF HIGH RESOLUTION SATELLITE IMAGES USING ARTIFICIAL NEURAL NETWORKS B.K. Mohan and S. N. Ladha Centre for Studies in Resources Engineering IIT
COMPARISON OF OBJECT BASED AND PIXEL BASED CLASSIFICATION OF HIGH RESOLUTION SATELLITE IMAGES USING ARTIFICIAL NEURAL NETWORKS B.K. Mohan and S. N. Ladha Centre for Studies in Resources Engineering IIT
Parametric Comparison of H.264 with Existing Video Standards
 Parametric Comparison of H.264 with Existing Video Standards Sumit Bhardwaj Department of Electronics and Communication Engineering Amity School of Engineering, Noida, Uttar Pradesh,INDIA Jyoti Bhardwaj
Parametric Comparison of H.264 with Existing Video Standards Sumit Bhardwaj Department of Electronics and Communication Engineering Amity School of Engineering, Noida, Uttar Pradesh,INDIA Jyoti Bhardwaj
3D Model based Object Class Detection in An Arbitrary View
 3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
How To Analyze Ball Blur On A Ball Image
 Single Image 3D Reconstruction of Ball Motion and Spin From Motion Blur An Experiment in Motion from Blur Giacomo Boracchi, Vincenzo Caglioti, Alessandro Giusti Objective From a single image, reconstruct:
Single Image 3D Reconstruction of Ball Motion and Spin From Motion Blur An Experiment in Motion from Blur Giacomo Boracchi, Vincenzo Caglioti, Alessandro Giusti Objective From a single image, reconstruct:
A technical overview of the Fuel3D system.
 A technical overview of the Fuel3D system. Contents Introduction 3 How does Fuel3D actually work? 4 Photometric imaging for high-resolution surface detail 4 Optical localization to track movement during
A technical overview of the Fuel3D system. Contents Introduction 3 How does Fuel3D actually work? 4 Photometric imaging for high-resolution surface detail 4 Optical localization to track movement during
Outline. srgb DX9, DX10, XBox 360. Tone Mapping. Motion Blur
 Outline srgb DX9, DX10, XBox 360 Tone Mapping Motion Blur srgb Outline srgb & gamma review Alpha Blending: DX9 vs. DX10 & XBox 360 srgb curve: PC vs. XBox 360 srgb Review Terminology: Color textures are
Outline srgb DX9, DX10, XBox 360 Tone Mapping Motion Blur srgb Outline srgb & gamma review Alpha Blending: DX9 vs. DX10 & XBox 360 srgb curve: PC vs. XBox 360 srgb Review Terminology: Color textures are
A NEW SUPER RESOLUTION TECHNIQUE FOR RANGE DATA. Valeria Garro, Pietro Zanuttigh, Guido M. Cortelazzo. University of Padova, Italy
 A NEW SUPER RESOLUTION TECHNIQUE FOR RANGE DATA Valeria Garro, Pietro Zanuttigh, Guido M. Cortelazzo University of Padova, Italy ABSTRACT Current Time-of-Flight matrix sensors allow for the acquisition
A NEW SUPER RESOLUTION TECHNIQUE FOR RANGE DATA Valeria Garro, Pietro Zanuttigh, Guido M. Cortelazzo University of Padova, Italy ABSTRACT Current Time-of-Flight matrix sensors allow for the acquisition
Denoising Convolutional Autoencoders for Noisy Speech Recognition
 Denoising Convolutional Autoencoders for Noisy Speech Recognition Mike Kayser Stanford University mkayser@stanford.edu Victor Zhong Stanford University vzhong@stanford.edu Abstract We propose the use of
Denoising Convolutional Autoencoders for Noisy Speech Recognition Mike Kayser Stanford University mkayser@stanford.edu Victor Zhong Stanford University vzhong@stanford.edu Abstract We propose the use of
Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 269 Class Project Report
 Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 69 Class Project Report Junhua Mao and Lunbo Xu University of California, Los Angeles mjhustc@ucla.edu and lunbo
Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 69 Class Project Report Junhua Mao and Lunbo Xu University of California, Los Angeles mjhustc@ucla.edu and lunbo
Environmental Remote Sensing GEOG 2021
 Environmental Remote Sensing GEOG 2021 Lecture 4 Image classification 2 Purpose categorising data data abstraction / simplification data interpretation mapping for land cover mapping use land cover class
Environmental Remote Sensing GEOG 2021 Lecture 4 Image classification 2 Purpose categorising data data abstraction / simplification data interpretation mapping for land cover mapping use land cover class
ROBUST COLOR JOINT MULTI-FRAME DEMOSAICING AND SUPER- RESOLUTION ALGORITHM
 ROBUST COLOR JOINT MULTI-FRAME DEMOSAICING AND SUPER- RESOLUTION ALGORITHM Theodor Heinze Hasso-Plattner-Institute for Software Systems Engineering Prof.-Dr.-Helmert-Str. 2-3, 14482 Potsdam, Germany theodor.heinze@hpi.uni-potsdam.de
ROBUST COLOR JOINT MULTI-FRAME DEMOSAICING AND SUPER- RESOLUTION ALGORITHM Theodor Heinze Hasso-Plattner-Institute for Software Systems Engineering Prof.-Dr.-Helmert-Str. 2-3, 14482 Potsdam, Germany theodor.heinze@hpi.uni-potsdam.de
Recognizing Cats and Dogs with Shape and Appearance based Models. Group Member: Chu Wang, Landu Jiang
 Recognizing Cats and Dogs with Shape and Appearance based Models Group Member: Chu Wang, Landu Jiang Abstract Recognizing cats and dogs from images is a challenging competition raised by Kaggle platform
Recognizing Cats and Dogs with Shape and Appearance based Models Group Member: Chu Wang, Landu Jiang Abstract Recognizing cats and dogs from images is a challenging competition raised by Kaggle platform