Among the consequences of the axioms of incidence, Hilbert spells out two Propositions.
|
|
|
- Kathlyn Strickland
- 7 years ago
- Views:
Transcription
1 2 Incidence Geometry 2.1 Elementary general facts Among the consequences of the axioms of incidence, Hilbert spells out two Propositions. Proposition 2.1 (Hilbert s Proposition 1). (a) Any two different lines have either no or exactly one point in common. (b) Any two different planes have either no point in common, or they have one line and no further points in common. (c) A plane and a line not lying in this plane have either no or exactly one point in common. Question. Give at least two further useful formulations of Proposition 2.1 part (a). Answer. Here are three possible answers: Any two different lines which are not parallel, have a unique point of intersection. If two lines have two or more points in common, they are equal. Two different lines have at most one point in common. Problem 2.1. Convince yourself of part (a), and give a short explanation. Prove statement (b). Use definite names for the objects, explain the steps, and state which axioms are involved. Prove statement (c). Write a short clear proof. Answer. (a) Take any two different lines l m. Assume towards a contradiction they intersect at two different points A B. By axiom (I.2), there exists at most one line through these two points. Hence l = m, contradicting the assumption that l and m are two different lines. Hence two different lines intersect at most in one point. (b) Take any two different planes α β. If they do not intersect, we are ready. Assume that the two planes have point of intersection A in common. By axiom (I.7), the two planes have a further point B A in common. By axioms (I.1) and (I.2), there exists a unique line a through points A and B. By axiom (I.6), every point of line a lies in the plane α. Reasoning about the same points A and B and line a, axiom (I.6) yields that every point of line a lies in the plane β, too. In other words, we get the inclusion a α β 46
2 We need still to check that the two planes α and β do not have any point outside the line a in common. Take any point C lying in both planes α and β. We assume towards a contradiction that point C does not lie on the line a. Both planes α and β contain the three points A, B and C. By axiom (I.5), there exists at most one plane through the three points A, B and C. Hence these two planes α and β would be equal, contradicting the assumption α β. Hence the two planes α and β have no point outside the line a in common. Together we get the equality a = α β We have shown that two planes intersecting at one point have a line through this point as their intersection. (c) Take a plane α and a line a not lying in α. We assume towards a contradiction they intersect at two different points A B. By axiom (I.6), every point of a lies in the plane α, contradicting the assumption that the line a is not lying in α. Hence the plane α and line a have at most one point in common. Problem 2.2. Prove from the axioms of incidence (I.1) (I.2) (I.3) that there exist two different lines through every point. Answer. By axiom (I.3b), there exist at least three points that do not lie on a line. We call them A, B and C. Let any point P be given. In the case that point P is different from all three points A, B, C, we draw the three lines PA,PB and PC. At least two of them are different since A, B, C do not lie on a line. In the case that point P is one of the three points A, B, C, we draw the three lines AB, BC and CA. These are three different lines, and two of them go through the given point P. In both cases we have obtained two different lines through the arbitrary point P. Proposition 2.2 (Hilbert s Proposition 2). (a) Given a line and a point not lying on it, there exists a unique plane containing the line and the point. (b) Given two different intersecting lines, there exists a unique plane containing these two lines. Proof. (a) Given is the line a and a point C not lying on it. By axiom (I.3a), there exist two points A B on the line a. The three points A, B, C do not lie on a line. Hence by axioms (I.4) and (I.5), there exists a unique plane α through these three points. By axiom (I.6), all points of line a lie in the plane α. Hence this plane contains both the given line and the given point. Uniqueness of the plane follows by axiom (I.5). 47
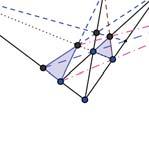
3 (b) Given are two different lines a and b, intersecting in point C. By axiom (I.3a), there exists a second point A C on line a, andapointb C on the line b. The three points A, B and C do not lie on one line, since the given lines a b are different. Hence, again by axioms (I.4) and (I.5), there exists a unique plane α through these three points. By axiom (I.6), all points of line a, as well as of line b lie in the plane α. Hence this plane contains both given lines. Uniqueness of the plane follows by axiom (I.5). Proposition 2.3 (Every plane is spanned by three points). In every plane, there exist three points not lying on a line. Hence any plane can be uniquely specified by three points lying on it. Proof. By the last sentence of axiom (I.4), there exists a point P in the given plane π. By axiom (I.8), there exist four points A, B, C and D not lying in a plane. There are several cases, with different number of points among A, B, C, D in the plane π. none of the points A, B, C, D lies in the plane π. By axioms (I.4) and (I.5), we know there are four different planes spanned by the points A, B, C or A, B, D or A, C, D or B,C,D, respectively. At most one of these four planes can contain point P otherwise the four points A, B, C, D would lie in one plane. After renaming the four points A, B, C, D, we may assume that point P does not lie in the plane spanned by A, B, C. We get two different planes α := span(p, A, B) andβ := span(p, B, C), as shown in the drawing on page 49. By Hilbert s Proposition 2, they intersect the given plane π in two lines α π and β π. By axiom (I.3a), a second point Q P on the line α π exists. The two lines α π and β π intersect at point P. But they are different otherwise the three points P, Q, B would span both planes α and β, which is impossible. A third point R exists on the second line β π, again by axiom (I.3a). All three points P, Q, R lie in the given plane π, but not on one line. Hence they span the given plane. one or two among the points A, B, C, D lie in the plane π. We may assume that points A, B do not lie in the plane π, but point D does lie in plane π. We get two different planes α := span(d, A, B) andβ := span(d, B, C). Now the argument from above is repeated with point P replaced by point D. three among the points A, B, C, D lie in the plane π. is obviously satisfied. In this case the assertion 48

4 Figure 2.1: The segment between two points on different sides of a plane intersects the plane. As far as two dimensional geometry is concerned, Proposition 2.1 reduces to the one simple statement that any two different lines either intersect at one point, or are parallel. For two dimensional geometry, we need not state that the parallel is in the plane determined by the given point and line. This leads to the following a bid simpler formulation: Definition 2.1 (Euclidean Parallel Postulate). For every line l and for every point P lying not on l, thereexists a unique parallel m to l through point P. But Hilbert s parallel axiom (IV) is a weaker assertion, it postulates only the uniqueness of the parallel to a given line through a given point. Definition 2.2 (Hilbert s Parallel Postulate for plane geometry). For every line l and for every point P lying not on l, there exists at most one parallel m to l through point P. Proposition 5.42 implies existence of a parallel once the axioms of order and congruence are assumed. Under these assumptions, Euclid s and Hilbert s parallel postulate turn out to be equivalent. But in the case of two-dimensional incidence geometry, this equivalence does not hold. Definition 2.3. We say that a two-dimensional incidence geometry for which the Euclidean Parallel Postulate holds, has the Euclidean parallel property. 49
5 Definition 2.4. We say that a two-dimensional incidence geometry has the elliptic parallel property iff any two lines do intersect necessarily at a unique point. Definition 2.5. We say that a two-dimensional incidence geometry has the hyperbolic parallel property iff for every line l and point P not on line l, there exist at least two parallels to line l through point P. 2.2 Finite incidence geometries Problem 2.3 (The four-point incidence geometries). Find all non isomorphic incidence geometries with four points. Which parallel property (elliptic, Euclidean, hyperbolic, or neither) does hold? Which one is the smallest affine plane? Figure 2.2: There are two four-point incidence geometries. Answer. There exist two non-isomorphic four-point geometries. (a) Six lines with each one two points. It has the Euclidean parallel property, and is the smallest affine plane. (b) There are four lines, one of which has three points. property. It has the elliptic parallel Problem 2.4 (The five-point incidence geometries). Find all non isomorphic incidence geometries with five points. Describe the properties of their points and lines. Which parallel property (elliptic, Euclidean, hyperbolic, or neither) does hold? Answer. There exist four different five-point geometries. (a) Ten lines have each two points. This model has the hyperbolic parallel property. (b) Exactly one line with three points. Altogether, there are eight lines. Neither parallel property holds. (c) Two intersecting lines with three points. Altogether, there are six lines. Neither parallel property holds. (d) There are five lines, one of which has four points. parallel property. This model has the elliptic 50
6 Figure 2.3: There are four five-point incidence geometries. Problem 2.5. Which ones of the four or five point incidence geometries satisfy the statement: On every line there exist at least two points, and furthermore, there exist three points not on the this line. Why is this statement different from Hilbert s axioms? Answer. The statement of the problem implies existence of five different points. Hence it does not hold for any four point incidence geometry. The statement postulates three extra points lying not on any given line, additionally to at least two points on this line. Hence it can only hold for a five point geometry, where every line has exactly two points. Indeed it holds only for model (a) above. Hilbert s axiom of incidence for plane geometry are (I.1)(I.2) and (I.3). Axiom (I.3) consists of two sentences: I.3a There exist at least two points on a line. I.3b There exist at least three points that do not lie on a line. Here part (I.3a) and (I.3b) do not refer to each other. Part (I.3a) is a universal statement about any line. But part (I.3b) is a purely existential statement about three points. On the other hand, the statement given in the problem is a different universal statement about a line. The first part repeats Hilbert s (I.3a). It goes on requiring additionally existence three points which are not lying on the same line. Problem 2.6. Which ones of the incidence axioms (I.1), (I.2), (I.3), and which parallel property hold in the first model drawn on page 52. Answer. Every two points lie on a unique line, and every two lines intersect at a unique point. Hence axioms (I.1) and (I.2), and the elliptic parallel property hold. Axiom (I.3) does not hold. Before we proceed to six or more points, we take notice of two simple models of finite incidence geometry the extreme ones in a sense which exist for all numbers n 4of points. 51
7 Figure 2.4: Too simple, this is not even an incidence geometry. Definition 2.6 (Hand-shake model). A hand shake model is an incidence geometry for which every line has exactly two points. Definition 2.7 (Straight fan). A straight fan is an incidence geometry with all but one point lying on one line. Figure 2.5: A straight fan is an incidence geometry but still no projective plane. Problem 2.7. How many lines does the hand-shake incidence geometry with n points have. How many lines does the straight fan with n points have. 52
8 Answer. The hand-shake incidence geometry with n points has (n 1) + (n 2) + +1= (n 1)n 2 lines. We see this as follows. We can connect the first point to the other (n 1) points. Disregarding this point, we connect the second point to (n 2) different points, and so on. The last line to be drawn is between the (n 1)-th and the n-th point. The straight fan with n points has n lines. There is one long line with n 1points, and only one point P does not lie on this line. There are n 1 lines with two points each of which connects P to a different point on the long line. Problem 2.8. Which parallel property holds for the hand-shake model with 4 points. Which parallel property holds for the hand-shake model with n 5 points. Which parallel property holds for a straight fan. Answer. The hand-shake model with 4 points has the Euclidean parallel property. All the hand-shake models with n 5 points have the hyperbolic parallel property. For all straight fans, the elliptic parallel property holds. Definition 2.8. The dual of an incidence plane with elliptic parallel property is the plane where the points are the lines of the old one, and vice versa. Question. What is the dual of a straight fan with n points. Answer. The dual is isomorphic to the primal, with n points (old lines), and n lines (old points) having the corresponding incidence relations. Problem 2.9 (The six-point incidence geometries). Find all non-isomorphic incidence geometries with six points. Count how many non-isomorphic models do exist. For the models different from the handshake and straight fan, mark all three-point lines with different blue shades, and any four-point line in red. Describe the properties of their points and lines. Count the lines. Which parallel property (elliptic, Euclidean, hyperbolic, or neither) does hold? Answer. There are nine non-isomorphic six-point incidence planes: 1. The handshake model with 15 short lines. 2. The model with only one three-point line has 13 lines. 3. The model with only one four-point line has = 10 lines. 4. The model with two parallel three-point lines has = 11 lines. 5. The model with two intersecting three-point lines has =11lines. 53
9 6. The model with a intersecting three-point line and four-point line has =8 lines. 7. The model with three intersecting three-point lines forming a triangle has = 9 lines. 8. The model with three intersecting three-point lines forming a triangle and the in-circle a fourth three-point line has = 7 lines. 9. The straight fan with = 6 lines. Only the straight fan is elliptic. There is no Euclidean model. There are several mixed models, with are not hyperbolic neither. Definition 2.9 (Isomorphism of incidence planes). Two incidence planes are called isomorphic if and only if there exists a bijection between the points of the two planes, and a bijection between the lines of the two planes such that incidence is preserved. Figure 2.6: Two isomorphic six-point incidence geometries Problem Given two incidence geometries, it is not obvious whether they are isomorphic. By corresponding labelling of the points in both geometries, show an isomorphism between the two six-point incidence geometries in the figure on page 54. Answer. Problem 2.11 (A nine point incidence geometry). Find a model of incidence geometry with nine points, which satisfies (I3+) "Every line contains exactly three points." and for which the Euclidean parallel axiom does hold: 54
10 Figure 2.7: The labelling of the points shows the isomorphism. "For every line l and every point P not on l, there exists exactly one parallel to the line l through P." It is enough to provide a drawing to explain the model. How many lines does the model have? Use colors for the lines. Choose clearly different colors for the lines in different directions, but give each set of three parallel lines different shades of nearby color. Answer. There is exactly one such model. It has 12 lines. Name any point A and let two lines through it consist of the points a = {A, B, C} and d = {A, D, G} (lines a and d are drawn horizontally and vertically). Let {D, E, F} be the parallel to line {A, B, C} through D. Two different parallels to a given line cannot intersect, because of the uniqueness of parallels. Hence the parallel to a through point G contains the remaining points and necessarily is {G, H, I}. The parallel to line {A, D, G} through B contains one of the points E,F and one of the points G, H. Possibly by exchanging names of those four points, we can assume that {B,E,H} is the parallel to line {A, D, G} through B. Finally, {C, F, I} is the parallel to line {A, D, G} through C. Up to now, we have mentioned and drawn six lines. Because of incidence axiom (I.1), there is a unique line through any two points. Hence there need to exist further lines in the model. As an example, we find the line g through points A and E. Itcannotpass through any of the points B,C,D,F,H,I, because otherwise we get a line with four or more points on it. Hence g = {A, E, I} is a line. Similarly, one finds lines {H, E, C}, and finally {B,D,I},{A, F, H},{B,F,G},{C, D, I}. It does not matter that the last four lines cannot be drawn as straight Euclidean lines. Neither does it matter that they have more intersection points those are not included as points of the model. The model contains 12 lines. It is the unique model satisfying all requirements. Remark. The model can be constructed using analytic geometry and arithmetic modulo 3. Take as points the ordered pairs (a, b) witha, b Z 3. As in analytic geometry, 55
11 Figure 2.8: A nine-point incidence geometry lines are given by linear equations ax + by + c =0witha, b, c Z 3 and a, b are not both zero. One defines the slope of a line in the usual way. Lines are parallel if and only if they have the same slope. To find the parallel to a given line through a given point, one uses the point slope equation of a straight line. This procedure shows that the Euclidean parallel property holds. 2.3 Affine incidence planes Definition 2.10 (Affine plane). An affine plane is a set of points, and a set of lines, satisfying the axioms: A.1 Every two different points lie on exactly one line. A.2 If point P does not lie on a line l, there exists exactly one line m through the point P that does not intersect l. 56
12 A.3 There exist three points that do not lie on a line. Axiom (A.2) is just the Euclidean parallel property. Because of the result of the problem below, an affine plane is just an incidence plane with the Euclidean parallel property. Problem The reader should convince himself that in an affine plane 1. on every line lie at least two points; 2. in every point intersect at least two lines. Proof. Let A, B, C be the three points not on a line which exist according to axiom (A.3). 1. Given is any line l. At most one of the three lines AB, BC and AC is parallel or equal to the given line l. We may assume that neither line AB nor line AC is parallel or equal to the given line l. Hence they intersect the given line in the points P = AB l and Q = AC l. If these two points P Q are different, we are ready. We get a more involved argument in the special case that P = Q. In this case, we get A = P = Q. If the line l intersects the line BC, we get a second intersection point R = BC l on the line l and are ready again. Still open is only the case that lines BC and l are parallel and the point A = P lies on the line l. Letm be the parallel to line c = AB through point C. Since m BC l, the line m is not parallel to l. Hence these two lines intersect at point R = m l A, which is a second point on the line l. 2. Given is any point P. Assume that P A, B, C. Since these three points do not lie on a line, we get from lines PA,PB and PC at least two different ones through point P. In the special case that P = A, we get two different lines AB and AC through point P. We argue similarly in the special cases where P = B or P = C. 57
13 Figure 2.9: In an affine plane, we find a second point on any given line. 58
14 Lemma 2.1 (Proclus Lemma).. In any affine plane, a third line intersecting one of two parallel lines intersects the other one, too. a third line parallel to one of two parallel lines, is parallel to the other one, too. Problem Explain why Proclus Lemma is an easy consequence of the uniqueness of parallels. Convince yourself that, conversely, Proclus Lemma implies the uniqueness of parallels. Solution. Suppose towards a contradiction that the transversal t intersects one of the parallel lines l and m, but not the other one. We may assume that P is the intersection point of lines t and m. If lines t and l would not intersect, then t and m would be two different parallels of line l through point P. This contradicts the uniqueness of parallels. Conversely, we now assume Proclus Lemma to be true and check the uniqueness of the parallel to a given line l through a given point P not on line l. Let m and t be two parallels to line l through point P these may be equal or different lines. The line t is a transversal intersecting one of the two parallel lines m l at point P. Hence it intersects the second line l, too, contrary to the assumption. The only possibility left is that m = t. Hence the parallel to a given line through a given point is unique. Remark. Don t fool yourself to think that all these words amount to a proof of the parallel postulate! All we have shown is: either both uniqueness of parallels and Proclus Lemma hold or neither uniqueness of parallels nor Proclus Lemma do hold. Problem Convince yourself that in an affine plane, the relation that two lines are either equal or parallel is an equivalence relation. Answer. For any two lines, let l m mean l = m or l m. The relation has the three defining properties of an equivalence relation. Indeed this relation is reflexive: since l = l is a logical axiom. symmetric: since l = m implies m = l, andl m implies m l. transitive: assume that m l and l k. If two of the three lines are equal, we substitute equals to get m k. We now assume that all three lines are different. The two lines m and k are either parallel or they intersect at one point, by Hilbert s first Proposition 2.1. If m and k would intersect at point P, the line l would have two different parallels through P, which is impossible in an affine plane. Therefore m and k are parallel, as to be shown. A relation that is reflexive, symmetric and transitive is called an equivalence relation. 59
15 2.4 Introduction of coordinates Definition 2.11 (The Cartesian plane). The "points" of the Cartesian plane are ordered pairs (x, y) ofrealnumbersx, y, R. The"lines" of the Cartesian plane are given by equations (2.1) ax + by + c =0 with reals coefficients a, b, c, anda and b not both equal to zero. A "point lies on a line" if and only if the coordinate pair (x, y) satisfies the equation of the line. Because coefficients (a, b, c) and(λa, λb, λc) withλ 0 give rise to the same line, the triples (a, b, c) arehomogeneous coordinates. Theorem 2.1. The Cartesian plane is an affine plane. Proof. One needs to check the incidence axioms (A.1), (A.2) and (A.3) from the definition (2.10) of an affine plane. But this is just standard material from College algebra! A slight complication arises because one needs to distinguish the special case of a vertical line x = c, and the other lines with an equation of the form y = mx + k. It is left to the reader to work out the details for the vertical lines. A.1 The equation of a line through two points is obtained by the two-point formula. A.2 The parallel to a given line l through a given point p is obtained by calculating the slope of the line l, and applying the point-slope formula with point P and the slope just obtained. Thus one gets the equation of the parallel. Because lines of different slopes do intersect, one gets the uniqueness of the parallel. A.3 The points with coordinates (0, 0), (0, 1) and (1, 0) do not lie on a line. Because the construction of the affine plane from the real numbers uses only addition, subtraction, multiplication and division, replacing the real numbers by any finite or infinite field F and doing the same construction once more, leads to an affine plane, too. Thus one gets the following general definition. Definition 2.12 (The Cartesian plane over a field F). The "points" of the Cartesian plane are ordered pairs (x, y) of elements x, y F. The"lines" of the Cartesian plane of the field F are equations ax + by + c =0 with coefficients a, b, c from the field, of which a and b are not both zero. A "point lies on a line" if and only if the coordinate pair (x, y) satisfies the equation of the line. 60
16 One defines the slope of a line in the usual way. Lines are parallel if and only if they have the same slope. To find the parallel to a given line through a given point, one uses the point slope equation of a straight line. This procedure shows that the Euclidean parallel property holds. It is left to the reader to work out all details. Theorem 2.2 (The Cartesian plane over an arbitrary field). In a Cartesian plane over any field, there exist a unique line between any two points. There exists a unique parallel to a line through a given point. Hilbert s axioms (I.1)(I.2)(I.3a)(I.3b) and the Euclidean parallel postulate (IV*) hold. Hence a Cartesian plane over a field is an affine plane. 2.5 Finite coordinate planes Problem 2.15 (A nine point incidence geometry). Find an affine plane of order three. Answer. As a simple example, we see that the affine plane given by the figure on page 765 can be constructed as Z 2 3, using the field Z 3, where the arithmetic is calculation modulo 3. This becomes even more visible by repeating copies of the same figure, shifted by three units along the x and y axes in a double periodic way. Obviously, the model has order 3, since there are n 2 = 9 points. Hence there are n 2 + n = 12 lines. There is exactly one such model. The finite fields are well- known from modern algebra. For any order n = p r where p is a prime number, and r 1 any natural number, there exists exactly one finite field. It is the Galois field, denoted by F n. Corollary 1 (Affine planes from finite fields). If the order n = p r is a prime power, there exists exactly an affine incidence plane of order p r. It has n 2 = p 2r points and n 2 + n = p 2r + p r lines. The points are ordered pairs (x, y) with arbitrary x, y F n. In other words, the set of points is the Cartesian product F n F n. Hence there are n 2 = p 2r points. The lines are the n vertical lines x = c with any c F n, as well as the other lines with an equation of the form y = mx + k with arbitrary m, k F n. Hence there are n 2 + n = p 2r + p r lines. Problem 2.16 (Scheduling problem I). Make a 6 day schedule for a school with 25 students. Each day the students are divided in a different way into 5 groups of 5 students. Never are two students in the same group more than one time during the week. Answer. We use the coordinate plane Z 5 Z 5. With addition and multiplication modulo 5, the set Z 5 is a field, because 5 is a prime number. Hence the coordinate plane Z 5 Z 5 is an affine plane with order 5. As explained by Proposition 2.18, each line has 5 of 61
17 points in a affine plane of order n = 5. The lines can be partitioned into n +1=6 classes, each containing 5 parallel lines. Hence one set of parallel lines determines the groups of students for one weekday. For each of the 6 weekdays, we use parallel lines with a different slope 0, 1, 2, 3, 4, and finally on one day the vertical parallel lines. One can make a picture (see page 62) of the schedule by drawing the 5 5 pattern of dots separately for every day. The five parallel lines in every pattern are indicated by different symbols for their points. One needs curved lines to connect all five points of a line, which I did not do. Clearly such a picture contains more insight than a bare-bone list. Figure 2.10: A picture to explain the schedule for five groups of five on six days. Problem 2.17 (Scheduling problem II). Make a 5 day schedule for a school with 15 students. Each day the students are divided in a different way into 5 groups of 3 students. Never are two students in the same group more than one time during the week. Answer. We cut down the solution of the last problem and retain just the 15 students from three groups on the sixth weekday. For the remaining five days, we obtain five groups with three students, as required. Problem 2.18 (Scheduling problem III). Make a 7 day schedule for a school with 35 students. Each day the students are divided in a different way into 7 groups of 5 students. Never are two students in the same group more than one time during the week. 62
18 2.6 Three-dimensional Euclidean incidence geometry For three dimensional incidence geometry, but no congruence assumed, one needs a strict version of the axiom of parallelism, including existence and uniqueness. (IV*) Strict axiom of parallelism Given is a line a and a point P not lying on a. In the plane determined by the point P and the line a, thereexists a unique parallel m to a through point P Definition 2.13 (Parallel lines and planes in three dimensions). (a) Two different lines which lie in one plane and do not intersect are called parallel. (b) Two different planes which do not intersect are called parallel. (c) A line and a plane that do not intersect are called parallel. In the following, we assume at first the axioms of incidence (I.1) through (I.8), and Hilbert s parallel axiom (IV) in order to assure the uniqueness of a parallel to a given line through a given point. The strict axiom of parallelism (IV*) is required later at the point where the existence of the parallel lines and planes is needed. By generalizing Proclus Lemma 2.1 and problem 2.14 to three dimensions, we are led to the following results. Proposition 2.4. Given is a plane and two parallel lines. We assume that the plane intersects one of them. Then either one of the three cases occurs: (i) both lines lie in the plane; (ii) one of the lines lies in the plane, and the other one is parallel to the plane; (iii) both lines intersect the plane at a single point. Proof. Let the plane α and the line a intersect at point A. The given lines a and b are parallel, and both lie in the plane β. The two planes α and β can be either equal or different. The special case α = β leads to alternative (i). In the other case α β, the two planes intersect at point A. By Hilbert s Proposition 1(b) (see Proposition 2.1), they intersect in a line c := α β. Either one of the following cases occurs: c = a. Hence line a lies in the plane α and line b is parallel to the plane α, leading to case (ii); c a. Now we use Proclus Lemma in the plane β, and conclude that line c intersects the parallel b a, too. The intersection point B := b c lies in the plane α, too. Hence the second parallel b intersects the given plane, as to be shown. This leads to case (iii). 63
19 Proposition 2.5. (a) a plane intersecting one of two parallel lines at only one point intersects the other line, too. (b) a line intersecting one of two parallel planes and not lying entirely in the first plane, intersects the other plane, too. (c) a third plane intersecting one of two parallel planes intersects the other plane, too. Proof of item (b). Let the line c and the plane α intersect at point A. Let β α be second parallel plane. We choose any point Q in the plane β, which is possible by axiom (I.4a). Let γ := span(c, Q) be the plane containing line c and point Q, which exists because of Proposition 2.2 part (a). Let p := α γ and q := β γ be the respective intersection lines, which exist according to Proposition 2.2 part (b). The lines p q are parallel since they lie in the parallel planes α β. Now we use Proclus Lemma for these two parallels in the plane γ. The given line c intersects the first parallel p in point A, hence it intersects the second parallel q in a point B := q c β a. This is the intersection of the second parallel plane β with line a to be obtained. Proof of item (c). Let the third plane γ α, β and the plane α intersect, say in the line a. Letβ α be second parallel plane. In the plane γ, we choose a second line c which intersects line a, sayinapointa. The line a lies entirely in the plane α, but the line c does not lie entirely in the plane α. We can now apply part (b) and get that the line c intersects the plane β in some point B = c β γ β. Hence the given plane γ intersects the second parallel plane β α,astobeshown. The contrapositive of Proposition 2.5 part (a) and (b) can be formulated as follows: Proposition 2.6. (a ) If one of two parallel lines is parallel to a plane, then the second line either lies entire in this plane, or is parallel to the plane, too. (b ) a line which is parallel to one of two parallel planes, either lies entirely in the second plane or is parallel to the other plane, too. The contrapositive of Proposition 2.5 part (c) can be formulated as follows: 64
20 Lemma 2.2 (Uniqueness of a parallel plane). For any plane α and point P not lying on it, there exists at most one parallel plane through this point. Proposition 2.7. Two planes which are both parallel to a third plane are either equal or parallel planes. Consequently, being equal or parallel is an equivalence relation among planes. Proof. This is the contrapositive of Proposition 2.4 part (c). Assume the planes α γ are different. Let the third plane β α, γ be parallel to both planes α β and γ β. If the planes α and γ would intersect, then Proposition 2.4 part (c) tells that the planes β and γ would intersect, too. This contradicts the assumption from above. Hence the planes α and γ are parallel, as to be shown. Being equal or parallel defines an equivalence relation among lines, too. This follows from the following a bid more difficult result. Effectively, we have to construct the third plane of a prism with the three lines as edges. Proposition 2.8. Two lines which are both parallel to a third line are either equal or parallel lines. Consequently, being equal or parallel is an equivalence relation among lines. Proof. Let the third line b a, c be parallel to both lines a b and c b. Letα be the plane in which a and b lie and γ be the plane in which c and b lie. In the case that these two planes are equal, we are back to the two dimensional version of problem We conclude that the lines a and c are either parallel or equal. We now assume that the planes α γ are different. We choose any point C on the line c and let β = span(a, C) be the plane in which line a and point C lie. The planes β γ are different, otherwise all three planes α, β and γ would be equal. We define the intersection line d = β γ and have to confirm that c = d. Thuswe get the third plane at the surface of a prism with the three lines a, b and c as edges. The lines b, c, d all lie in the plane γ. Lines b c are parallel by assumption. Since b d =(α γ) (β γ) =(α β) (α γ) =a b = we see that the lines b d are parallel, too. We now use Proclus Lemma in the plane β. The line d intersects the parallel c b in point C. If lines d and c would be different, the line d would intersect the parallel b, too. That is a contradiction to the last formula above. Hence the lines d and c are equal. Thus we conclude that both lines: line a and line c = d = β γ lie in the plane β = span(a, C). Moreover, the lines a and c do not intersect since a c = a d =(α β) (β γ) = Hence the lines a and c are parallel, as to be shown. 65

. We assume the axioms of incidence (I.1) through (I.8) and the Euclidean parallel postulate (IV*).")
21 As a consequence of Proposition 2.6, part (a ) and (b ), the two equivalence relations for parallelism of lines and planes are compatible. In the following, we shall use existence of the parallel lines and planes. Because there is no direct construction of parallels, we need not only Hilbert s parallel axiom, but the strict axiom of parallelism (IV*). Proposition 2.9 (Existence and uniqueness of a parallel plane). We assume the axioms of incidence (I.1) through (I.8) and the Euclidean parallel postulate (IV*). For any plane α and point P not lying on it, there exists a unique parallel plane through this point. Figure 2.11: Construction of the plane through a given point parallel to a given plane. Proof. The easier proof of uniqueness is left to the reader. To show existence, we use two intersecting lines in the given plane, and their parallels to the given point. As shown in Proposition 2.3, we can choose three points A, B and C spanning the given plane α. In the plane spanned by points A, B and the given point P,wegetthe parallel m through P to the line AB. In the plane spanned by points A, C and the given point P,wegettheparallell through P to the line AC. By Hilbert s Proposition 2, there exists a unique plane π containing the intersecting lines m and l. Clearly this plane contains point P. We need still to check that the planes α and π are parallel. Assume towards a contradiction that the planes α π intersect, say at point X. By Hilbert s Proposition 1b, they would intersect in a line x through point X. All 66
22 Figure 2.12: Desargues Theorem. three lines m, l and x lie in the plane π. The lines m and x do not intersect because of Lemma??, hence lines m x are parallel. Similarly, we see that lines l x are parallel. The line x would have two different intersecting parallel m and l, contradicting uniqueness of the parallel. The only way to avoid the contradiction is planes α and π being parallel. For a segment, it is assumed that the two endpoints A and B are different. For a triangle ABC, it is assumed that the three vertices A,B and C do not lie on a line. The order of the three vertices A, B and C matters. The lines a = BC, b = AC, and c = AB are the sides of the triangle. See also definition 12.3 above. 14 The following definition strictly speaking refers to the projective completion of the Euclidean space or plane. Definition The vertices of two triangles ABC and A B C lie in perspective iff the three lines AA, BB and CC through corresponding vertices go through one point, or are all three parallel. The sides of two triangles lie in perspective iff the three intersection points a a, b b and c c of corresponding sides lie on a line. Again, we have to assert that these intersections exist either as proper or improper points. 14 We cannot and need not at this point use the axioms of order. 67
23 Figure 2.13: Projecting the three-dimensional Desargues to the two-dimensional one. Proposition 2.10 (Theorem of Desargues). We assume the axioms of incidence (I.1) through (I.8) and the strict axiom of parallelism (IV*). The vertices of two triangles lie in perspective if and only if its sides lie in perspective. For any two triangles, for the assertions occurring above, I use the short hands (Verts) (Sides) the vertices of two triangles lie in perspective the sides of two triangles lie in perspective Problem Assume that the triangles lie in different planes. Convince yourself that (Verts) (Sides). Problem Assume that the triangles lie in different planes. Convince yourself that (Sides) (Verts). Lemma 2.3. If (Verts) (Sides) holds for any two triangles lying in different planes, it holds for any two different triangles in the same plane, too. Reason. Given are two triangles ABC and A B C in the same plane π and its vertices lie in perspective, say at center Z. At least one pair of corresponding sides are different. We can assume that the sides AC and A C are different and intersect at point Q. 68
24 Let X be a point not lying in the plane π. The plane spanned by points Z, B and X contains at least three points on every line. 15 Hence there exists a further point D X, D B on the line XB. Let D be the intersection of lines ZD and XB. Indeed, if B B, all seven points X, Z, D, D,B,B are different (why?). We use point X as center of projection to produce a new three dimensional Desargues configuration, consisting of the triangles ADC and A D C. They lie in different planes (why?). By construction, their vertices lie in perspective. Hence, by the threedimensional Desargues theorem, their sides lie in perspective. The three intersection points Q = AC A C,S:= AD A D,T:= CD C D exist and lie on a line. A central projection with center X onto the plane π maps Q Q, S P, T R where P := AB A B,Q= AC A C,R:= BC B C Hence these three points lie on a line, as to be shown. Remark. Work in the completion of the Euclidean space. Convince yourself that including cases were several of the vertices or sides turn out to be equal do not lead to contradictions. Lemma 2.4. If (Verts) (Sides) holds for any two triangles lying in the same plane, the converse (Sides) (Verts) holds for any two triangles in the same plane, too. Reason. Given are two triangles ABC and A B C in the same plane, the sides of which lie in perspective. The three points P := AB A B,Q= AC A C,R:= BC B C lie on a line. Let Z = BB CC be the intersection of the lines through two pairs of corresponding vertices. We apply the first part of Desargues theorem to the triangles PBB and QCC. Their vertices lie in perspective with center R. Hence their sides lie in perspective. Thus the three intersections points A = PB QC, A := PB QC,Z:= BB CC lie on a line. Hence the vertices of triangles ABC and A B C lie in perspective with center Z, astobeshown. Remark. Convince yourself that including cases were several of the vertices or sides turn out to be equal do not lead to contradictions. 15 At this point, we have used axiom [P.3] There exist four points of which no three lie on a line, from the definition 2.20 of a projective plane. 69
25 Figure 2.14: Desargues implies the converse Desargues. Problem Convince yourself: If (Verts) (Sides) holds for any two triangles lying in different planes, the converse (Sides) (Verts) holds for any two triangles in different planes, too. Proposition If an affine plane is embedded into a three dimensional incidence geometry, where the axioms of incidence (I.1) through (I.8) and the Euclidean parallel postulate (IV*) hold, then the Theorem of Desargues holds in this affine plane, respectively its completion, Theorem 2.3 (The Little Theorem of Desargues). Given is an affine plane, respectively its projective completion. We assume that the vertices of two triangles lie in perspective; the center of projection and intersections points on two pairs of corresponding sides lie on a line L. Then the intersection point of the third pair of corresponding sides lies on the line L, too. Thus the sides of the triangles lie in perspective. Proposition 2.12 (Converse of the Little Theorem of Desargues). We assume that 70
26 two triangles lie in the same plane and their sides are in perspectively at the line L; the intersection point of two lines through corresponding vertices lies on the line L. These assumptions imply that the vertices of the triangles lie in perspective. Remark. In an affine plane, we have to assert that the relevant intersections exist either as proper or improper points. So these theorems really refers to the projective completion of the affine plane. Problem Convince yourself that in any affine plane, the Little Theorem of Desargues implies its converse. Proposition In any affine plane, the Little Theorem of Desargues implies its converse. The Theorem of Desargues implies the Little Theorem of Desargues. Remark. In a more comprehensive treatment of the Theorems of Desargues and Pappus, and the corresponding Little Theorems, it is customary to use the setting of a projective plane. Neither the Theorem of Desargues, nor the Theorem of Pappus, nor the corresponding Little Theorems hold automatically in every projective plane. In the affine setting, assuming only the axioms of incidence (I.1) through (I.3) and the Euclidean parallel postulate (IV*), is not enough to deduct the Little Theorem of Desargues, or the Theorem of Desargues. The first example of a non-desarguesian plane is due to Frederic Moulton (1902). A detailed exposition is available in Hilbert s Foundations, and in the recent book by Stillwell [35]. In the Moulton plane, it is easy to get an instance, where even the Little Theorem of Desargues is violated. Remark. The embedding into a three dimensional geometry is the most natural assumption leading to the Theorem of Desargue. For Hilbert and his followers this is a major motivation to include three dimensions into the axiomatic setting. Remark. It is an rather easy but important fact that the Theorem of Desargues holds for all incidence geometries obtained from coordinates with values in a field or skew field. 2.7 Tiling in perspective view Given is a parallelogram, or even simply a square or rectangle. Clearly it is possible to tile the Euclidean plane with shifts of the parallelogram. How can one draw the perspective view of such a tiling? From the given first quadrangle, we can find the horizon since two pairs of opposite sides intersect in two points on the horizon. To construct shifts of the first quadrangle, 71
27 we use the fact that the shifted quadrangles have parallel diagonals. We need to use just one diagonal of the first quadrangle, and get in a unique way three adjacent ones. The drawing on page 73 shows the process in perspective, as well as simply from the view of the Euclidean plane. In both figures is done the construction with the following steps: Construct parallel p1 to the diagonal, find intersection point S2, draw parallel p3 through S2 to the horizontal side, intersection point S4 with the diagonal, draw the parallel p5 through S4 to the vertical side. The other intersection points which complete the four adjacent parallelograms are obviously given at that point. A deeper mathematical question is the following. The process can obviously be done in any affine plane. Do there exist affine planes for which this process leads to contradictions. Especially, is the third diagonal automatically parallel. And how about the three other diagonals. Are they parallel? Are there indeed three points on the other long diagonal? Proposition Assume the Little Theorem of Desargues holds. Then the construction from above of the four translates of a quadrangle can be done such that the parallel sides and parallel diagonals of the translated quadrangles intersect on four points on the horizon. In other words, the obvious incidences asked for above do hold. The figures on page 74 show how to complete the proof in five steps. The first three steps depend on the Little Theorem of Desargues; the last two steps on the converse Little Theorem of Desargues. 72
28 Figure 2.15: How to construct a tiling. 73
29 Figure 2.16: How to prove the expected incidences; step 1. 74
30 Figure 2.17: How to prove the expected incidences; step 2. 75
31 Figure 2.18: How to prove the expected incidences; step 3. 76



32 Figure 2.19: How to prove the expected incidences; all steps. 77
33 2.8 Projective incidence planes Projective planes are incidence planes with elliptic parallel property. But an additional axiom is needed, in order to rule out uninteresting cases. A straight fan (see definition 2.7) is too simple for what one wants to be a projective plane. In a projective plane, one wants to build perspective and the corresponding mappings and measurements. As natural starting point of such an endeavor, one needs four points in a convenient configuration. I like to think of them, as the standpoint of the observer, a point some distance away from him, and two points on the horizon to the left and right. Definition 2.15 (Quadrangle and quadrilateral). Four points, no three of which lie on a line, are said to be a quadrangle. These four points are necessarily distinct. Four lines, no three of which intersect at a point, are said to be a quadrilateral. Again these four lines are necessarily distinct. Definition 2.16 (Projective plane). A projective plane is a class of points, and a class of lines satisfying the axioms: P.1 Every two points lie on exactly one line. P.2 Every two lines intersect at exactly one point. P.3 There exist four points of which no three lie on a line. Remark. The lines are not necessarily sets of points. Problem Which parallel property holds for a projective plane? Convince yourself that on every line of a projective plane lie at least three points. Secondly, convince yourself that in every point intersect at least three lines, and that a quadrilateral exists. Answer. By axiom (P.3), there exist at least four points A, B, C, D of which no three lie on a line. Let any point P be given. In the case that point P is different from all four points A, B, C, D, we draw the lines PA,PB,PC and PD. At least three of them are different since no three points among A, B, C, D lie on a line. In the case that point P is one of the four points A, B, C, D, we get three different lines through the given point P among the six lines connecting A, B, C, D. In both cases we have obtained three different lines through the arbitrary point P. The proof confirming that three points lie on every line is done quite similarly, interchanging the roles of points and lines. Proposition 2.15 (The straight fan is the only exception). An incidence geometry with elliptic parallel property is either a straight fan (see definition 2.7), or a quadrangle exists. Hence, in the latter case, it is a projective plane. 78
34 Proof. We assume the elliptic parallel property holds, but no quadrangle exists. We have to check that we get a straight fan. The three-point incidence geometry is a straight fan, as claimed. Hence we now assume at least four points to exist. Take any four points of the given incidence plane. Since no quadrangle exists, three among them lie on a line. We can assume that the three points A, B, C lie on the line l. By the axiom (I.3) for the incidence plane, there exists a further point P not on the line l. We claim there cannot exist two points Q P neither of which lies on the line l. Assume towards a contradiction that the two points Q P both do not lie on l. The lines PQ and l do intersect, either in one of the three points A, B, C, or still another point. We can assume the intersection point A is different from both B and C. Of the four points B,C,P,Q at least three lie on a line. This could be points P, Q, B or P, Q, C. Both cases are impossible, since the lines PQ and l = BC intersect only in point A B,C. Hence there exists exactly one point P not on the line l. Thus the incidence geometry is a straight fan. Definition 2.17 (Pencil, improper elements of an affine plane). An equivalence class of (equal or) parallel lines is called a pencil. To each pencil corresponds an improper point. 16 The line through all improper points is called the improper line. 17 Definition 2.18 (The projective completion of an affine plane). By adding the improper points and the improper line, one can construct from any affine plane a projective plane, called the projective completion. Both the proper and the improper points (lines) of an affine plane are the points (lines) of a projective plane. Proposition 2.16 (Construction of an affine plane from a projective plane). Given is a projective plane. Any line and all points on it are marked as improper, the remaining points and lines are called proper lines and proper points. (a) The proper points and lines yield an affine plane. (b) Concatination of improper elements leads back to the original projective plane. Proof. Definition 2.19 (Dual projective plane). The dual of a projective plane is the projective plane where the points are the lines of the original one, and vice versa. The "points" of the dual projective plane are the lines of the primal projective plane. The "lines" of the dual projective plane are the points of the primal projective plane. 16 This name is given for visual reasons. We want to catch the vague idea of a point very far away in the direction pointed to by a pencil, and make it precise in terms of rudimental set theory. 17 I reserve the names points at infinity and line at infinity to hyperbolic geometry. 79
INCIDENCE-BETWEENNESS GEOMETRY
 INCIDENCE-BETWEENNESS GEOMETRY MATH 410, CSUSM. SPRING 2008. PROFESSOR AITKEN This document covers the geometry that can be developed with just the axioms related to incidence and betweenness. The full
INCIDENCE-BETWEENNESS GEOMETRY MATH 410, CSUSM. SPRING 2008. PROFESSOR AITKEN This document covers the geometry that can be developed with just the axioms related to incidence and betweenness. The full
THREE DIMENSIONAL GEOMETRY
 Chapter 8 THREE DIMENSIONAL GEOMETRY 8.1 Introduction In this chapter we present a vector algebra approach to three dimensional geometry. The aim is to present standard properties of lines and planes,
Chapter 8 THREE DIMENSIONAL GEOMETRY 8.1 Introduction In this chapter we present a vector algebra approach to three dimensional geometry. The aim is to present standard properties of lines and planes,
Lesson 18: Looking More Carefully at Parallel Lines
 Student Outcomes Students learn to construct a line parallel to a given line through a point not on that line using a rotation by 180. They learn how to prove the alternate interior angles theorem using
Student Outcomes Students learn to construct a line parallel to a given line through a point not on that line using a rotation by 180. They learn how to prove the alternate interior angles theorem using
Notes from February 11
 Notes from February 11 Math 130 Course web site: www.courses.fas.harvard.edu/5811 Two lemmas Before proving the theorem which was stated at the end of class on February 8, we begin with two lemmas. The
Notes from February 11 Math 130 Course web site: www.courses.fas.harvard.edu/5811 Two lemmas Before proving the theorem which was stated at the end of class on February 8, we begin with two lemmas. The
Geometry 1. Unit 3: Perpendicular and Parallel Lines
 Geometry 1 Unit 3: Perpendicular and Parallel Lines Geometry 1 Unit 3 3.1 Lines and Angles Lines and Angles Parallel Lines Parallel lines are lines that are coplanar and do not intersect. Some examples
Geometry 1 Unit 3: Perpendicular and Parallel Lines Geometry 1 Unit 3 3.1 Lines and Angles Lines and Angles Parallel Lines Parallel lines are lines that are coplanar and do not intersect. Some examples
Selected practice exam solutions (part 5, item 2) (MAT 360)
 (MAT 360)") Selected practice exam solutions (part 5, item ) (MAT 360) Harder 8,91,9,94(smaller should be replaced by greater )95,103,109,140,160,(178,179,180,181 this is really one problem),188,193,194,195 8. On
Selected practice exam solutions (part 5, item ) (MAT 360) Harder 8,91,9,94(smaller should be replaced by greater )95,103,109,140,160,(178,179,180,181 this is really one problem),188,193,194,195 8. On
PYTHAGOREAN TRIPLES KEITH CONRAD
 PYTHAGOREAN TRIPLES KEITH CONRAD 1. Introduction A Pythagorean triple is a triple of positive integers (a, b, c) where a + b = c. Examples include (3, 4, 5), (5, 1, 13), and (8, 15, 17). Below is an ancient
PYTHAGOREAN TRIPLES KEITH CONRAD 1. Introduction A Pythagorean triple is a triple of positive integers (a, b, c) where a + b = c. Examples include (3, 4, 5), (5, 1, 13), and (8, 15, 17). Below is an ancient
Synthetic Projective Treatment of Cevian Nests and Graves Triangles
 Synthetic Projective Treatment of Cevian Nests and Graves Triangles Igor Minevich 1 Introduction Several proofs of the cevian nest theorem (given below) are known, including one using ratios along sides
Synthetic Projective Treatment of Cevian Nests and Graves Triangles Igor Minevich 1 Introduction Several proofs of the cevian nest theorem (given below) are known, including one using ratios along sides
alternate interior angles
 alternate interior angles two non-adjacent angles that lie on the opposite sides of a transversal between two lines that the transversal intersects (a description of the location of the angles); alternate
alternate interior angles two non-adjacent angles that lie on the opposite sides of a transversal between two lines that the transversal intersects (a description of the location of the angles); alternate
Elements of Plane Geometry by LK
 Elements of Plane Geometry by LK These are notes indicating just some bare essentials of plane geometry and some problems to think about. We give a modified version of the axioms for Euclidean Geometry
Elements of Plane Geometry by LK These are notes indicating just some bare essentials of plane geometry and some problems to think about. We give a modified version of the axioms for Euclidean Geometry
DEFINITIONS. Perpendicular Two lines are called perpendicular if they form a right angle.
 DEFINITIONS Degree A degree is the 1 th part of a straight angle. 180 Right Angle A 90 angle is called a right angle. Perpendicular Two lines are called perpendicular if they form a right angle. Congruent
DEFINITIONS Degree A degree is the 1 th part of a straight angle. 180 Right Angle A 90 angle is called a right angle. Perpendicular Two lines are called perpendicular if they form a right angle. Congruent
Section 1.1. Introduction to R n
 The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
The Calculus of Functions of Several Variables Section. Introduction to R n Calculus is the study of functional relationships and how related quantities change with each other. In your first exposure to
Classical theorems on hyperbolic triangles from a projective point of view
 tmcs-szilasi 2012/3/1 0:14 page 175 #1 10/1 (2012), 175 181 Classical theorems on hyperbolic triangles from a projective point of view Zoltán Szilasi Abstract. Using the Cayley-Klein model of hyperbolic
tmcs-szilasi 2012/3/1 0:14 page 175 #1 10/1 (2012), 175 181 Classical theorems on hyperbolic triangles from a projective point of view Zoltán Szilasi Abstract. Using the Cayley-Klein model of hyperbolic
Arrangements And Duality
 Arrangements And Duality 3.1 Introduction 3 Point configurations are tbe most basic structure we study in computational geometry. But what about configurations of more complicated shapes? For example,
Arrangements And Duality 3.1 Introduction 3 Point configurations are tbe most basic structure we study in computational geometry. But what about configurations of more complicated shapes? For example,
MATH10040 Chapter 2: Prime and relatively prime numbers
 MATH10040 Chapter 2: Prime and relatively prime numbers Recall the basic definition: 1. Prime numbers Definition 1.1. Recall that a positive integer is said to be prime if it has precisely two positive
MATH10040 Chapter 2: Prime and relatively prime numbers Recall the basic definition: 1. Prime numbers Definition 1.1. Recall that a positive integer is said to be prime if it has precisely two positive
GEOMETRY. Constructions OBJECTIVE #: G.CO.12
 GEOMETRY Constructions OBJECTIVE #: G.CO.12 OBJECTIVE Make formal geometric constructions with a variety of tools and methods (compass and straightedge, string, reflective devices, paper folding, dynamic
GEOMETRY Constructions OBJECTIVE #: G.CO.12 OBJECTIVE Make formal geometric constructions with a variety of tools and methods (compass and straightedge, string, reflective devices, paper folding, dynamic
December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B. KITCHENS
 December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B KITCHENS The equation 1 Lines in two-dimensional space (1) 2x y = 3 describes a line in two-dimensional space The coefficients of x and y in the equation
December 4, 2013 MATH 171 BASIC LINEAR ALGEBRA B KITCHENS The equation 1 Lines in two-dimensional space (1) 2x y = 3 describes a line in two-dimensional space The coefficients of x and y in the equation
DESARGUES THEOREM DONALD ROBERTSON
 DESARGUES THEOREM DONALD ROBERTSON Two triangles ABC and A B C are said to be in perspective axially when no two vertices are equal and when the three intersection points AC A C, AB A B and BC B C are
DESARGUES THEOREM DONALD ROBERTSON Two triangles ABC and A B C are said to be in perspective axially when no two vertices are equal and when the three intersection points AC A C, AB A B and BC B C are
Solutions to Practice Problems
 Higher Geometry Final Exam Tues Dec 11, 5-7:30 pm Practice Problems (1) Know the following definitions, statements of theorems, properties from the notes: congruent, triangle, quadrilateral, isosceles
Higher Geometry Final Exam Tues Dec 11, 5-7:30 pm Practice Problems (1) Know the following definitions, statements of theorems, properties from the notes: congruent, triangle, quadrilateral, isosceles
Just the Factors, Ma am
 1 Introduction Just the Factors, Ma am The purpose of this note is to find and study a method for determining and counting all the positive integer divisors of a positive integer Let N be a given positive
1 Introduction Just the Factors, Ma am The purpose of this note is to find and study a method for determining and counting all the positive integer divisors of a positive integer Let N be a given positive
PROJECTIVE GEOMETRY. b3 course 2003. Nigel Hitchin
 PROJECTIVE GEOMETRY b3 course 2003 Nigel Hitchin hitchin@maths.ox.ac.uk 1 1 Introduction This is a course on projective geometry. Probably your idea of geometry in the past has been based on triangles
PROJECTIVE GEOMETRY b3 course 2003 Nigel Hitchin hitchin@maths.ox.ac.uk 1 1 Introduction This is a course on projective geometry. Probably your idea of geometry in the past has been based on triangles
Mathematics Geometry Unit 1 (SAMPLE)
") Review the Geometry sample year-long scope and sequence associated with this unit plan. Mathematics Possible time frame: Unit 1: Introduction to Geometric Concepts, Construction, and Proof 14 days This
Review the Geometry sample year-long scope and sequence associated with this unit plan. Mathematics Possible time frame: Unit 1: Introduction to Geometric Concepts, Construction, and Proof 14 days This
Geometry Module 4 Unit 2 Practice Exam
 Name: Class: Date: ID: A Geometry Module 4 Unit 2 Practice Exam Multiple Choice Identify the choice that best completes the statement or answers the question. 1. Which diagram shows the most useful positioning
Name: Class: Date: ID: A Geometry Module 4 Unit 2 Practice Exam Multiple Choice Identify the choice that best completes the statement or answers the question. 1. Which diagram shows the most useful positioning
On the generation of elliptic curves with 16 rational torsion points by Pythagorean triples
 On the generation of elliptic curves with 16 rational torsion points by Pythagorean triples Brian Hilley Boston College MT695 Honors Seminar March 3, 2006 1 Introduction 1.1 Mazur s Theorem Let C be a
On the generation of elliptic curves with 16 rational torsion points by Pythagorean triples Brian Hilley Boston College MT695 Honors Seminar March 3, 2006 1 Introduction 1.1 Mazur s Theorem Let C be a
The Graphical Method: An Example
 The Graphical Method: An Example Consider the following linear program: Maximize 4x 1 +3x 2 Subject to: 2x 1 +3x 2 6 (1) 3x 1 +2x 2 3 (2) 2x 2 5 (3) 2x 1 +x 2 4 (4) x 1, x 2 0, where, for ease of reference,
The Graphical Method: An Example Consider the following linear program: Maximize 4x 1 +3x 2 Subject to: 2x 1 +3x 2 6 (1) 3x 1 +2x 2 3 (2) 2x 2 5 (3) 2x 1 +x 2 4 (4) x 1, x 2 0, where, for ease of reference,
Math 4310 Handout - Quotient Vector Spaces
 Math 4310 Handout - Quotient Vector Spaces Dan Collins The textbook defines a subspace of a vector space in Chapter 4, but it avoids ever discussing the notion of a quotient space. This is understandable
Math 4310 Handout - Quotient Vector Spaces Dan Collins The textbook defines a subspace of a vector space in Chapter 4, but it avoids ever discussing the notion of a quotient space. This is understandable
Graph Theory Problems and Solutions
 raph Theory Problems and Solutions Tom Davis tomrdavis@earthlink.net http://www.geometer.org/mathcircles November, 005 Problems. Prove that the sum of the degrees of the vertices of any finite graph is
raph Theory Problems and Solutions Tom Davis tomrdavis@earthlink.net http://www.geometer.org/mathcircles November, 005 Problems. Prove that the sum of the degrees of the vertices of any finite graph is
Geometry of Vectors. 1 Cartesian Coordinates. Carlo Tomasi
 Geometry of Vectors Carlo Tomasi This note explores the geometric meaning of norm, inner product, orthogonality, and projection for vectors. For vectors in three-dimensional space, we also examine the
Geometry of Vectors Carlo Tomasi This note explores the geometric meaning of norm, inner product, orthogonality, and projection for vectors. For vectors in three-dimensional space, we also examine the
INTRODUCTION TO EUCLID S GEOMETRY
 78 MATHEMATICS INTRODUCTION TO EUCLID S GEOMETRY CHAPTER 5 5.1 Introduction The word geometry comes form the Greek words geo, meaning the earth, and metrein, meaning to measure. Geometry appears to have
78 MATHEMATICS INTRODUCTION TO EUCLID S GEOMETRY CHAPTER 5 5.1 Introduction The word geometry comes form the Greek words geo, meaning the earth, and metrein, meaning to measure. Geometry appears to have
Mathematical Induction. Mary Barnes Sue Gordon
 Mathematics Learning Centre Mathematical Induction Mary Barnes Sue Gordon c 1987 University of Sydney Contents 1 Mathematical Induction 1 1.1 Why do we need proof by induction?.... 1 1. What is proof by
Mathematics Learning Centre Mathematical Induction Mary Barnes Sue Gordon c 1987 University of Sydney Contents 1 Mathematical Induction 1 1.1 Why do we need proof by induction?.... 1 1. What is proof by
Discrete Mathematics and Probability Theory Fall 2009 Satish Rao, David Tse Note 2
 CS 70 Discrete Mathematics and Probability Theory Fall 2009 Satish Rao, David Tse Note 2 Proofs Intuitively, the concept of proof should already be familiar We all like to assert things, and few of us
CS 70 Discrete Mathematics and Probability Theory Fall 2009 Satish Rao, David Tse Note 2 Proofs Intuitively, the concept of proof should already be familiar We all like to assert things, and few of us
ON THE SIMSON WALLACE THEOREM
 South Bohemia Mathematical Letters Volume 21, (2013), No. 1, 59 66. ON THE SIMSON WALLACE THEOREM PAVEL PECH 1, EMIL SKŘÍŠOVSKÝ2 Abstract. The paper deals with the well-known Simson Wallace theorem and
South Bohemia Mathematical Letters Volume 21, (2013), No. 1, 59 66. ON THE SIMSON WALLACE THEOREM PAVEL PECH 1, EMIL SKŘÍŠOVSKÝ2 Abstract. The paper deals with the well-known Simson Wallace theorem and
The University of the State of New York REGENTS HIGH SCHOOL EXAMINATION GEOMETRY. Wednesday, January 28, 2015 9:15 a.m. to 12:15 p.m.
 GEOMETRY The University of the State of New York REGENTS HIGH SCHOOL EXAMINATION GEOMETRY Wednesday, January 28, 2015 9:15 a.m. to 12:15 p.m., only Student Name: School Name: The possession or use of any
GEOMETRY The University of the State of New York REGENTS HIGH SCHOOL EXAMINATION GEOMETRY Wednesday, January 28, 2015 9:15 a.m. to 12:15 p.m., only Student Name: School Name: The possession or use of any
Math 3000 Section 003 Intro to Abstract Math Homework 2
 Math 3000 Section 003 Intro to Abstract Math Homework 2 Department of Mathematical and Statistical Sciences University of Colorado Denver, Spring 2012 Solutions (February 13, 2012) Please note that these
Math 3000 Section 003 Intro to Abstract Math Homework 2 Department of Mathematical and Statistical Sciences University of Colorado Denver, Spring 2012 Solutions (February 13, 2012) Please note that these
Chapter 4.1 Parallel Lines and Planes
 Chapter 4.1 Parallel Lines and Planes Expand on our definition of parallel lines Introduce the idea of parallel planes. What do we recall about parallel lines? In geometry, we have to be concerned about
Chapter 4.1 Parallel Lines and Planes Expand on our definition of parallel lines Introduce the idea of parallel planes. What do we recall about parallel lines? In geometry, we have to be concerned about
Geometry Course Summary Department: Math. Semester 1
 Geometry Course Summary Department: Math Semester 1 Learning Objective #1 Geometry Basics Targets to Meet Learning Objective #1 Use inductive reasoning to make conclusions about mathematical patterns Give
Geometry Course Summary Department: Math Semester 1 Learning Objective #1 Geometry Basics Targets to Meet Learning Objective #1 Use inductive reasoning to make conclusions about mathematical patterns Give
Mathematics Course 111: Algebra I Part IV: Vector Spaces
 Mathematics Course 111: Algebra I Part IV: Vector Spaces D. R. Wilkins Academic Year 1996-7 9 Vector Spaces A vector space over some field K is an algebraic structure consisting of a set V on which are
Mathematics Course 111: Algebra I Part IV: Vector Spaces D. R. Wilkins Academic Year 1996-7 9 Vector Spaces A vector space over some field K is an algebraic structure consisting of a set V on which are
CIRCLE COORDINATE GEOMETRY
 CIRCLE COORDINATE GEOMETRY (EXAM QUESTIONS) Question 1 (**) A circle has equation x + y = 2x + 8 Determine the radius and the coordinates of the centre of the circle. r = 3, ( 1,0 ) Question 2 (**) A circle
CIRCLE COORDINATE GEOMETRY (EXAM QUESTIONS) Question 1 (**) A circle has equation x + y = 2x + 8 Determine the radius and the coordinates of the centre of the circle. r = 3, ( 1,0 ) Question 2 (**) A circle
a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a 2n x n = b 2.
 Chapter 1 LINEAR EQUATIONS 1.1 Introduction to linear equations A linear equation in n unknowns x 1, x,, x n is an equation of the form a 1 x 1 + a x + + a n x n = b, where a 1, a,..., a n, b are given
Chapter 1 LINEAR EQUATIONS 1.1 Introduction to linear equations A linear equation in n unknowns x 1, x,, x n is an equation of the form a 1 x 1 + a x + + a n x n = b, where a 1, a,..., a n, b are given
Handout #1: Mathematical Reasoning
 Math 101 Rumbos Spring 2010 1 Handout #1: Mathematical Reasoning 1 Propositional Logic A proposition is a mathematical statement that it is either true or false; that is, a statement whose certainty or
Math 101 Rumbos Spring 2010 1 Handout #1: Mathematical Reasoning 1 Propositional Logic A proposition is a mathematical statement that it is either true or false; that is, a statement whose certainty or
Geometry. Higher Mathematics Courses 69. Geometry
 The fundamental purpose of the course is to formalize and extend students geometric experiences from the middle grades. This course includes standards from the conceptual categories of and Statistics and
The fundamental purpose of the course is to formalize and extend students geometric experiences from the middle grades. This course includes standards from the conceptual categories of and Statistics and
MODERN APPLICATIONS OF PYTHAGORAS S THEOREM
 UNIT SIX MODERN APPLICATIONS OF PYTHAGORAS S THEOREM Coordinate Systems 124 Distance Formula 127 Midpoint Formula 131 SUMMARY 134 Exercises 135 UNIT SIX: 124 COORDINATE GEOMETRY Geometry, as presented
UNIT SIX MODERN APPLICATIONS OF PYTHAGORAS S THEOREM Coordinate Systems 124 Distance Formula 127 Midpoint Formula 131 SUMMARY 134 Exercises 135 UNIT SIX: 124 COORDINATE GEOMETRY Geometry, as presented
WHAT ARE MATHEMATICAL PROOFS AND WHY THEY ARE IMPORTANT?
 WHAT ARE MATHEMATICAL PROOFS AND WHY THEY ARE IMPORTANT? introduction Many students seem to have trouble with the notion of a mathematical proof. People that come to a course like Math 216, who certainly
WHAT ARE MATHEMATICAL PROOFS AND WHY THEY ARE IMPORTANT? introduction Many students seem to have trouble with the notion of a mathematical proof. People that come to a course like Math 216, who certainly
Number Theory. Proof. Suppose otherwise. Then there would be a finite number n of primes, which we may
 Number Theory Divisibility and Primes Definition. If a and b are integers and there is some integer c such that a = b c, then we say that b divides a or is a factor or divisor of a and write b a. Definition
Number Theory Divisibility and Primes Definition. If a and b are integers and there is some integer c such that a = b c, then we say that b divides a or is a factor or divisor of a and write b a. Definition
Situation: Proving Quadrilaterals in the Coordinate Plane
 Situation: Proving Quadrilaterals in the Coordinate Plane 1 Prepared at the University of Georgia EMAT 6500 Date Last Revised: 07/31/013 Michael Ferra Prompt A teacher in a high school Coordinate Algebra
Situation: Proving Quadrilaterals in the Coordinate Plane 1 Prepared at the University of Georgia EMAT 6500 Date Last Revised: 07/31/013 Michael Ferra Prompt A teacher in a high school Coordinate Algebra
Understanding Basic Calculus
 Understanding Basic Calculus S.K. Chung Dedicated to all the people who have helped me in my life. i Preface This book is a revised and expanded version of the lecture notes for Basic Calculus and other
Understanding Basic Calculus S.K. Chung Dedicated to all the people who have helped me in my life. i Preface This book is a revised and expanded version of the lecture notes for Basic Calculus and other
1 if 1 x 0 1 if 0 x 1
 Chapter 3 Continuity In this chapter we begin by defining the fundamental notion of continuity for real valued functions of a single real variable. When trying to decide whether a given function is or
Chapter 3 Continuity In this chapter we begin by defining the fundamental notion of continuity for real valued functions of a single real variable. When trying to decide whether a given function is or
12. Parallels. Then there exists a line through P parallel to l.
 12. Parallels Given one rail of a railroad track, is there always a second rail whose (perpendicular) distance from the first rail is exactly the width across the tires of a train, so that the two rails
12. Parallels Given one rail of a railroad track, is there always a second rail whose (perpendicular) distance from the first rail is exactly the width across the tires of a train, so that the two rails
Mathematical Induction
 Mathematical Induction (Handout March 8, 01) The Principle of Mathematical Induction provides a means to prove infinitely many statements all at once The principle is logical rather than strictly mathematical,
Mathematical Induction (Handout March 8, 01) The Principle of Mathematical Induction provides a means to prove infinitely many statements all at once The principle is logical rather than strictly mathematical,
Chapter 9. Systems of Linear Equations
 Chapter 9. Systems of Linear Equations 9.1. Solve Systems of Linear Equations by Graphing KYOTE Standards: CR 21; CA 13 In this section we discuss how to solve systems of two linear equations in two variables
Chapter 9. Systems of Linear Equations 9.1. Solve Systems of Linear Equations by Graphing KYOTE Standards: CR 21; CA 13 In this section we discuss how to solve systems of two linear equations in two variables
NOTES ON LINEAR TRANSFORMATIONS
 NOTES ON LINEAR TRANSFORMATIONS Definition 1. Let V and W be vector spaces. A function T : V W is a linear transformation from V to W if the following two properties hold. i T v + v = T v + T v for all
NOTES ON LINEAR TRANSFORMATIONS Definition 1. Let V and W be vector spaces. A function T : V W is a linear transformation from V to W if the following two properties hold. i T v + v = T v + T v for all
Linear Algebra I. Ronald van Luijk, 2012
 Linear Algebra I Ronald van Luijk, 2012 With many parts from Linear Algebra I by Michael Stoll, 2007 Contents 1. Vector spaces 3 1.1. Examples 3 1.2. Fields 4 1.3. The field of complex numbers. 6 1.4.
Linear Algebra I Ronald van Luijk, 2012 With many parts from Linear Algebra I by Michael Stoll, 2007 Contents 1. Vector spaces 3 1.1. Examples 3 1.2. Fields 4 1.3. The field of complex numbers. 6 1.4.
Incenter Circumcenter
 TRIANGLE: Centers: Incenter Incenter is the center of the inscribed circle (incircle) of the triangle, it is the point of intersection of the angle bisectors of the triangle. The radius of incircle is
TRIANGLE: Centers: Incenter Incenter is the center of the inscribed circle (incircle) of the triangle, it is the point of intersection of the angle bisectors of the triangle. The radius of incircle is
So let us begin our quest to find the holy grail of real analysis.
 1 Section 5.2 The Complete Ordered Field: Purpose of Section We present an axiomatic description of the real numbers as a complete ordered field. The axioms which describe the arithmetic of the real numbers
1 Section 5.2 The Complete Ordered Field: Purpose of Section We present an axiomatic description of the real numbers as a complete ordered field. The axioms which describe the arithmetic of the real numbers
4.2 Euclid s Classification of Pythagorean Triples
 178 4. Number Theory: Fermat s Last Theorem Exercise 4.7: A primitive Pythagorean triple is one in which any two of the three numbers are relatively prime. Show that every multiple of a Pythagorean triple
178 4. Number Theory: Fermat s Last Theorem Exercise 4.7: A primitive Pythagorean triple is one in which any two of the three numbers are relatively prime. Show that every multiple of a Pythagorean triple
Reflection and Refraction
 Equipment Reflection and Refraction Acrylic block set, plane-concave-convex universal mirror, cork board, cork board stand, pins, flashlight, protractor, ruler, mirror worksheet, rectangular block worksheet,
Equipment Reflection and Refraction Acrylic block set, plane-concave-convex universal mirror, cork board, cork board stand, pins, flashlight, protractor, ruler, mirror worksheet, rectangular block worksheet,
Factoring Patterns in the Gaussian Plane
 Factoring Patterns in the Gaussian Plane Steve Phelps Introduction This paper describes discoveries made at the Park City Mathematics Institute, 00, as well as some proofs. Before the summer I understood
Factoring Patterns in the Gaussian Plane Steve Phelps Introduction This paper describes discoveries made at the Park City Mathematics Institute, 00, as well as some proofs. Before the summer I understood
Baltic Way 1995. Västerås (Sweden), November 12, 1995. Problems and solutions
, November 12, 1995. Problems and solutions") Baltic Way 995 Västerås (Sweden), November, 995 Problems and solutions. Find all triples (x, y, z) of positive integers satisfying the system of equations { x = (y + z) x 6 = y 6 + z 6 + 3(y + z ). Solution.
Baltic Way 995 Västerås (Sweden), November, 995 Problems and solutions. Find all triples (x, y, z) of positive integers satisfying the system of equations { x = (y + z) x 6 = y 6 + z 6 + 3(y + z ). Solution.
Continued Fractions and the Euclidean Algorithm
 Continued Fractions and the Euclidean Algorithm Lecture notes prepared for MATH 326, Spring 997 Department of Mathematics and Statistics University at Albany William F Hammond Table of Contents Introduction
Continued Fractions and the Euclidean Algorithm Lecture notes prepared for MATH 326, Spring 997 Department of Mathematics and Statistics University at Albany William F Hammond Table of Contents Introduction
Chapter 17. Orthogonal Matrices and Symmetries of Space
 Chapter 17. Orthogonal Matrices and Symmetries of Space Take a random matrix, say 1 3 A = 4 5 6, 7 8 9 and compare the lengths of e 1 and Ae 1. The vector e 1 has length 1, while Ae 1 = (1, 4, 7) has length
Chapter 17. Orthogonal Matrices and Symmetries of Space Take a random matrix, say 1 3 A = 4 5 6, 7 8 9 and compare the lengths of e 1 and Ae 1. The vector e 1 has length 1, while Ae 1 = (1, 4, 7) has length
CHAPTER 3. Methods of Proofs. 1. Logical Arguments and Formal Proofs
 CHAPTER 3 Methods of Proofs 1. Logical Arguments and Formal Proofs 1.1. Basic Terminology. An axiom is a statement that is given to be true. A rule of inference is a logical rule that is used to deduce
CHAPTER 3 Methods of Proofs 1. Logical Arguments and Formal Proofs 1.1. Basic Terminology. An axiom is a statement that is given to be true. A rule of inference is a logical rule that is used to deduce
11.1. Objectives. Component Form of a Vector. Component Form of a Vector. Component Form of a Vector. Vectors and the Geometry of Space
 11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
11 Vectors and the Geometry of Space 11.1 Vectors in the Plane Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. 2 Objectives! Write the component form of
ISOMETRIES OF R n KEITH CONRAD
 ISOMETRIES OF R n KEITH CONRAD 1. Introduction An isometry of R n is a function h: R n R n that preserves the distance between vectors: h(v) h(w) = v w for all v and w in R n, where (x 1,..., x n ) = x
ISOMETRIES OF R n KEITH CONRAD 1. Introduction An isometry of R n is a function h: R n R n that preserves the distance between vectors: h(v) h(w) = v w for all v and w in R n, where (x 1,..., x n ) = x
INTRODUCTORY SET THEORY
 M.Sc. program in mathematics INTRODUCTORY SET THEORY Katalin Károlyi Department of Applied Analysis, Eötvös Loránd University H-1088 Budapest, Múzeum krt. 6-8. CONTENTS 1. SETS Set, equal sets, subset,
M.Sc. program in mathematics INTRODUCTORY SET THEORY Katalin Károlyi Department of Applied Analysis, Eötvös Loránd University H-1088 Budapest, Múzeum krt. 6-8. CONTENTS 1. SETS Set, equal sets, subset,
5.3 The Cross Product in R 3
 53 The Cross Product in R 3 Definition 531 Let u = [u 1, u 2, u 3 ] and v = [v 1, v 2, v 3 ] Then the vector given by [u 2 v 3 u 3 v 2, u 3 v 1 u 1 v 3, u 1 v 2 u 2 v 1 ] is called the cross product (or
53 The Cross Product in R 3 Definition 531 Let u = [u 1, u 2, u 3 ] and v = [v 1, v 2, v 3 ] Then the vector given by [u 2 v 3 u 3 v 2, u 3 v 1 u 1 v 3, u 1 v 2 u 2 v 1 ] is called the cross product (or
6.3 Conditional Probability and Independence
 222 CHAPTER 6. PROBABILITY 6.3 Conditional Probability and Independence Conditional Probability Two cubical dice each have a triangle painted on one side, a circle painted on two sides and a square painted
222 CHAPTER 6. PROBABILITY 6.3 Conditional Probability and Independence Conditional Probability Two cubical dice each have a triangle painted on one side, a circle painted on two sides and a square painted
Vocabulary. Term Page Definition Clarifying Example. biconditional statement. conclusion. conditional statement. conjecture.
 CHAPTER Vocabulary The table contains important vocabulary terms from Chapter. As you work through the chapter, fill in the page number, definition, and a clarifying example. biconditional statement conclusion
CHAPTER Vocabulary The table contains important vocabulary terms from Chapter. As you work through the chapter, fill in the page number, definition, and a clarifying example. biconditional statement conclusion
1.3. DOT PRODUCT 19. 6. If θ is the angle (between 0 and π) between two non-zero vectors u and v,
 between two non-zero vectors u and v,") 1.3. DOT PRODUCT 19 1.3 Dot Product 1.3.1 Definitions and Properties The dot product is the first way to multiply two vectors. The definition we will give below may appear arbitrary. But it is not. It
1.3. DOT PRODUCT 19 1.3 Dot Product 1.3.1 Definitions and Properties The dot product is the first way to multiply two vectors. The definition we will give below may appear arbitrary. But it is not. It
Chapter 18 Symmetry. Symmetry of Shapes in a Plane 18.1. then unfold
 Chapter 18 Symmetry Symmetry is of interest in many areas, for example, art, design in general, and even the study of molecules. This chapter begins with a look at two types of symmetry of two-dimensional
Chapter 18 Symmetry Symmetry is of interest in many areas, for example, art, design in general, and even the study of molecules. This chapter begins with a look at two types of symmetry of two-dimensional
Definitions, Postulates and Theorems
 Definitions, s and s Name: Definitions Complementary Angles Two angles whose measures have a sum of 90 o Supplementary Angles Two angles whose measures have a sum of 180 o A statement that can be proven
Definitions, s and s Name: Definitions Complementary Angles Two angles whose measures have a sum of 90 o Supplementary Angles Two angles whose measures have a sum of 180 o A statement that can be proven
Angles that are between parallel lines, but on opposite sides of a transversal.
 GLOSSARY Appendix A Appendix A: Glossary Acute Angle An angle that measures less than 90. Acute Triangle Alternate Angles A triangle that has three acute angles. Angles that are between parallel lines,
GLOSSARY Appendix A Appendix A: Glossary Acute Angle An angle that measures less than 90. Acute Triangle Alternate Angles A triangle that has three acute angles. Angles that are between parallel lines,
Curriculum Map by Block Geometry Mapping for Math Block Testing 2007-2008. August 20 to August 24 Review concepts from previous grades.
 Curriculum Map by Geometry Mapping for Math Testing 2007-2008 Pre- s 1 August 20 to August 24 Review concepts from previous grades. August 27 to September 28 (Assessment to be completed by September 28)
Curriculum Map by Geometry Mapping for Math Testing 2007-2008 Pre- s 1 August 20 to August 24 Review concepts from previous grades. August 27 to September 28 (Assessment to be completed by September 28)
Example SECTION 13-1. X-AXIS - the horizontal number line. Y-AXIS - the vertical number line ORIGIN - the point where the x-axis and y-axis cross
 CHAPTER 13 SECTION 13-1 Geometry and Algebra The Distance Formula COORDINATE PLANE consists of two perpendicular number lines, dividing the plane into four regions called quadrants X-AXIS - the horizontal
CHAPTER 13 SECTION 13-1 Geometry and Algebra The Distance Formula COORDINATE PLANE consists of two perpendicular number lines, dividing the plane into four regions called quadrants X-AXIS - the horizontal
2.1. Inductive Reasoning EXAMPLE A
 CONDENSED LESSON 2.1 Inductive Reasoning In this lesson you will Learn how inductive reasoning is used in science and mathematics Use inductive reasoning to make conjectures about sequences of numbers
CONDENSED LESSON 2.1 Inductive Reasoning In this lesson you will Learn how inductive reasoning is used in science and mathematics Use inductive reasoning to make conjectures about sequences of numbers
Proposition 4: SAS Triangle Congruence
 Proposition 4: SAS Triangle Congruence The method of proof used in this proposition is sometimes called "superposition." It apparently is not a method that Euclid prefers since he so rarely uses it, only
Proposition 4: SAS Triangle Congruence The method of proof used in this proposition is sometimes called "superposition." It apparently is not a method that Euclid prefers since he so rarely uses it, only
Terminology: When one line intersects each of two given lines, we call that line a transversal.
 Feb 23 Notes: Definition: Two lines l and m are parallel if they lie in the same plane and do not intersect. Terminology: When one line intersects each of two given lines, we call that line a transversal.
Feb 23 Notes: Definition: Two lines l and m are parallel if they lie in the same plane and do not intersect. Terminology: When one line intersects each of two given lines, we call that line a transversal.
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS
 MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS Systems of Equations and Matrices Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS Systems of Equations and Matrices Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
. 0 1 10 2 100 11 1000 3 20 1 2 3 4 5 6 7 8 9
 Introduction The purpose of this note is to find and study a method for determining and counting all the positive integer divisors of a positive integer Let N be a given positive integer We say d is a
Introduction The purpose of this note is to find and study a method for determining and counting all the positive integer divisors of a positive integer Let N be a given positive integer We say d is a
LINEAR EQUATIONS IN TWO VARIABLES
 66 MATHEMATICS CHAPTER 4 LINEAR EQUATIONS IN TWO VARIABLES The principal use of the Analytic Art is to bring Mathematical Problems to Equations and to exhibit those Equations in the most simple terms that
66 MATHEMATICS CHAPTER 4 LINEAR EQUATIONS IN TWO VARIABLES The principal use of the Analytic Art is to bring Mathematical Problems to Equations and to exhibit those Equations in the most simple terms that
Introduction to Algebraic Geometry. Bézout s Theorem and Inflection Points
 Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
Introduction to Algebraic Geometry Bézout s Theorem and Inflection Points 1. The resultant. Let K be a field. Then the polynomial ring K[x] is a unique factorisation domain (UFD). Another example of a
SYSTEMS OF EQUATIONS AND MATRICES WITH THE TI-89. by Joseph Collison
 SYSTEMS OF EQUATIONS AND MATRICES WITH THE TI-89 by Joseph Collison Copyright 2000 by Joseph Collison All rights reserved Reproduction or translation of any part of this work beyond that permitted by Sections
SYSTEMS OF EQUATIONS AND MATRICES WITH THE TI-89 by Joseph Collison Copyright 2000 by Joseph Collison All rights reserved Reproduction or translation of any part of this work beyond that permitted by Sections
A Correlation of Pearson Texas Geometry Digital, 2015
 A Correlation of Pearson Texas Geometry Digital, 2015 To the Texas Essential Knowledge and Skills (TEKS) for Geometry, High School, and the Texas English Language Proficiency Standards (ELPS) Correlations
A Correlation of Pearson Texas Geometry Digital, 2015 To the Texas Essential Knowledge and Skills (TEKS) for Geometry, High School, and the Texas English Language Proficiency Standards (ELPS) Correlations
k, then n = p2α 1 1 pα k
 Powers of Integers An integer n is a perfect square if n = m for some integer m. Taking into account the prime factorization, if m = p α 1 1 pα k k, then n = pα 1 1 p α k k. That is, n is a perfect square
Powers of Integers An integer n is a perfect square if n = m for some integer m. Taking into account the prime factorization, if m = p α 1 1 pα k k, then n = pα 1 1 p α k k. That is, n is a perfect square
PRIMARY CONTENT MODULE Algebra I -Linear Equations & Inequalities T-71. Applications. F = mc + b.
 PRIMARY CONTENT MODULE Algebra I -Linear Equations & Inequalities T-71 Applications The formula y = mx + b sometimes appears with different symbols. For example, instead of x, we could use the letter C.
PRIMARY CONTENT MODULE Algebra I -Linear Equations & Inequalities T-71 Applications The formula y = mx + b sometimes appears with different symbols. For example, instead of x, we could use the letter C.
Mathematics Review for MS Finance Students
 Mathematics Review for MS Finance Students Anthony M. Marino Department of Finance and Business Economics Marshall School of Business Lecture 1: Introductory Material Sets The Real Number System Functions,
Mathematics Review for MS Finance Students Anthony M. Marino Department of Finance and Business Economics Marshall School of Business Lecture 1: Introductory Material Sets The Real Number System Functions,
Quotient Rings and Field Extensions
 Chapter 5 Quotient Rings and Field Extensions In this chapter we describe a method for producing field extension of a given field. If F is a field, then a field extension is a field K that contains F.
Chapter 5 Quotient Rings and Field Extensions In this chapter we describe a method for producing field extension of a given field. If F is a field, then a field extension is a field K that contains F.
61. Pascal s Hexagon Theorem.
 . Pascal s Hexagon Theorem. Prove that the three points of intersection of the opposite sides of a hexagon inscribed in a conic section lie on a straight line. Hexagon has opposite sides,;, and,. Pascal
. Pascal s Hexagon Theorem. Prove that the three points of intersection of the opposite sides of a hexagon inscribed in a conic section lie on a straight line. Hexagon has opposite sides,;, and,. Pascal
SUM OF TWO SQUARES JAHNAVI BHASKAR
 SUM OF TWO SQUARES JAHNAVI BHASKAR Abstract. I will investigate which numbers can be written as the sum of two squares and in how many ways, providing enough basic number theory so even the unacquainted
SUM OF TWO SQUARES JAHNAVI BHASKAR Abstract. I will investigate which numbers can be written as the sum of two squares and in how many ways, providing enough basic number theory so even the unacquainted
LINEAR INEQUALITIES. Mathematics is the art of saying many things in many different ways. MAXWELL
 Chapter 6 LINEAR INEQUALITIES 6.1 Introduction Mathematics is the art of saying many things in many different ways. MAXWELL In earlier classes, we have studied equations in one variable and two variables
Chapter 6 LINEAR INEQUALITIES 6.1 Introduction Mathematics is the art of saying many things in many different ways. MAXWELL In earlier classes, we have studied equations in one variable and two variables
SYSTEMS OF PYTHAGOREAN TRIPLES. Acknowledgements. I would like to thank Professor Laura Schueller for advising and guiding me
 SYSTEMS OF PYTHAGOREAN TRIPLES CHRISTOPHER TOBIN-CAMPBELL Abstract. This paper explores systems of Pythagorean triples. It describes the generating formulas for primitive Pythagorean triples, determines
SYSTEMS OF PYTHAGOREAN TRIPLES CHRISTOPHER TOBIN-CAMPBELL Abstract. This paper explores systems of Pythagorean triples. It describes the generating formulas for primitive Pythagorean triples, determines
Mechanics 1: Vectors
 Mechanics 1: Vectors roadly speaking, mechanical systems will be described by a combination of scalar and vector quantities. scalar is just a (real) number. For example, mass or weight is characterized
Mechanics 1: Vectors roadly speaking, mechanical systems will be described by a combination of scalar and vector quantities. scalar is just a (real) number. For example, mass or weight is characterized
discuss how to describe points, lines and planes in 3 space.
 Chapter 2 3 Space: lines and planes In this chapter we discuss how to describe points, lines and planes in 3 space. introduce the language of vectors. discuss various matters concerning the relative position
Chapter 2 3 Space: lines and planes In this chapter we discuss how to describe points, lines and planes in 3 space. introduce the language of vectors. discuss various matters concerning the relative position
Projective Geometry - Part 2
 Projective Geometry - Part 2 Alexander Remorov alexanderrem@gmail.com Review Four collinear points A, B, C, D form a harmonic bundle (A, C; B, D) when CA : DA CB DB = 1. A pencil P (A, B, C, D) is the
Projective Geometry - Part 2 Alexander Remorov alexanderrem@gmail.com Review Four collinear points A, B, C, D form a harmonic bundle (A, C; B, D) when CA : DA CB DB = 1. A pencil P (A, B, C, D) is the
Problem of the Month: Cutting a Cube
 Problem of the Month: The Problems of the Month (POM) are used in a variety of ways to promote problem solving and to foster the first standard of mathematical practice from the Common Core State Standards:
Problem of the Month: The Problems of the Month (POM) are used in a variety of ways to promote problem solving and to foster the first standard of mathematical practice from the Common Core State Standards:
Copyrighted Material. Chapter 1 DEGREE OF A CURVE
 Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
Chapter 1 DEGREE OF A CURVE Road Map The idea of degree is a fundamental concept, which will take us several chapters to explore in depth. We begin by explaining what an algebraic curve is, and offer two
The University of the State of New York REGENTS HIGH SCHOOL EXAMINATION GEOMETRY. Thursday, August 13, 2015 8:30 to 11:30 a.m., only.
 GEOMETRY The University of the State of New York REGENTS HIGH SCHOOL EXAMINATION GEOMETRY Thursday, August 13, 2015 8:30 to 11:30 a.m., only Student Name: School Name: The possession or use of any communications
GEOMETRY The University of the State of New York REGENTS HIGH SCHOOL EXAMINATION GEOMETRY Thursday, August 13, 2015 8:30 to 11:30 a.m., only Student Name: School Name: The possession or use of any communications
5.1 Midsegment Theorem and Coordinate Proof
 5.1 Midsegment Theorem and Coordinate Proof Obj.: Use properties of midsegments and write coordinate proofs. Key Vocabulary Midsegment of a triangle - A midsegment of a triangle is a segment that connects
5.1 Midsegment Theorem and Coordinate Proof Obj.: Use properties of midsegments and write coordinate proofs. Key Vocabulary Midsegment of a triangle - A midsegment of a triangle is a segment that connects
LEARNING OBJECTIVES FOR THIS CHAPTER
 CHAPTER 2 American mathematician Paul Halmos (1916 2006), who in 1942 published the first modern linear algebra book. The title of Halmos s book was the same as the title of this chapter. Finite-Dimensional
CHAPTER 2 American mathematician Paul Halmos (1916 2006), who in 1942 published the first modern linear algebra book. The title of Halmos s book was the same as the title of this chapter. Finite-Dimensional
Semester Exam Review. Multiple Choice Identify the choice that best completes the statement or answers the question.
 Semester Exam Review Multiple Choice Identify the choice that best completes the statement or answers the question. 1. Are O, N, and P collinear? If so, name the line on which they lie. O N M P a. No,
Semester Exam Review Multiple Choice Identify the choice that best completes the statement or answers the question. 1. Are O, N, and P collinear? If so, name the line on which they lie. O N M P a. No,
Lecture L3 - Vectors, Matrices and Coordinate Transformations
 S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between