Direct Camera Calibration
|
|
|
- Blaze Jefferson
- 7 years ago
- Views:
Transcription

1 Direct Camera Calibration
2 Solve for camera parameters (intrinsic, extrinsic, or both) from a set of known 3-D points (known geometry) and their 2-D projections on the image P=[X, Y, Z] in 3-D world coordinate system A = [x, y] image pixel Direct Calibration or from Projection Matrix Intrinsic parameters: principal point [o x, o y ] (image center) scale factors s x, s y (pixel dimension: e.g., pixels/mm) aspect ratio α (s y /s x ) focal length f (mm) lens distortions k 1, k 2, k 3, p 1, p 2 2
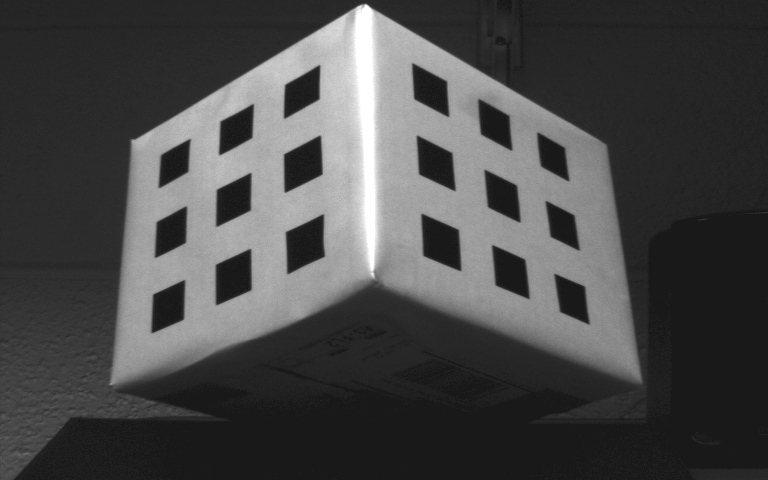
3 Typical Calibration Pattern Calibration pattern with known 3-D points In what precision the pattern should be built? Is calibration necessary? 3
4 Direct Calibration Input is a set of known 3-D points in world coordinate system. How to establish the world coordinate system? Three mutually orthogonal directions 3 D points in world coordinate system = [ X w Y w Z w ] The same 3 - Dpoints in the camera coordinate system = [ X c Y c Z c ] 4
5 y c C x c y f c x f z w I F z o r W y w z c y o x o x w The position and orientation of the camera frame is unknown The origin of the camera frame is the center of projection 5
6 X c X w Y c = R Y Z c w +T Rotation first and then translation Z w R and T (extrinsic parameters) are not known X c = r 11 X w + r 12 Y w + r 13 Z w +T x Y c = r 21 X w + r 22 Y w + r 23 Z w +T y Z c = r 31 X w + r 32 Y w + r 33 Z w +T z 6
7 X c Y c Z c = R X w Y w Z w x i = s x f X c y i = s y f Y c + T Z c + o x Z c + o y Let f x = s x f and α = s x /s y Solving for five parameters f, s x,s y,o x,and o y becomes solving for four parameters f x,α,o x, and o y. All four parameters are independent. f x is the focal length expressed in horizontal pixels. 7
8 x i o x = f x r 11 X w + r 12 Y w + r 13 Z w + T x r 31 X w + r 32 Y w + r 33 Z w + T z y i o y = f y r 21 X w + r 22 Y w + r 23 Z w + T y r 31 X w + r 32 Y w + r 33 Z w + T z If we know a sufficient number of 3-D points and image data points (x, y), then all parameters can be calculated. 8
9 Problem Statement x i o x = f x r 11 X w + r 12 Y w + r 13 Z w + T x r 31 X w + r 32 Y w + r 33 Z w + T z y i o y = f y r 21 X w + r 22 Y w + r 23 Z w + T y r 31 X w + r 32 Y w + r 33 Z w + T z f x,α,r, and T can be estimated from known world points [X i w,y i w,z i w ] T and their projected image points (x i, y i ) and i = 1,2,...N, assuming o x and o y are known (the origin of the image reference frame) 9
10 10
11 x i (r 21 X w + r 22 Y w + r 23 Z w + T y ) y i α(r 11 X w + r 12 Y w + r 13 Z w + T x ) = 0 A [r 21 r 22 r 23 T y αr 11 αr 12 αr 13 αt x ] T = Av = 0 Using SVD (A = UDV T ) to solve for v as the column of V corresponding to the only null or the smallest (noise) singular value (eigenvalue) along the diagonal of D 11
12 Av = 0 A is a N 8 matrix. If N 7 and the N points are not coplanar, A has rank 7 and the homogeneous system has a nontrivial solution (unique up to an unknow scale factor). but becasue of image noise and inaccuracy in locating 2- D points. A could have the maximum rank (8). In this case, there will be no null singular value along the diagonal of D and the system would only have a trivial solution. In this case, we use the eigenvector corresponding to the smallest eigenvalue. 12
13 Solving Av = 0 to get the solution upto an unknow scale factor v = γ[r 21 r 22 r 23 T y αr 11 αr 12 αr 13 αt x ], where γ is the scale factor. Since r r r 2 23 = 1 (why?), γ 2 (r r r 2 23 ) = γ Similarly, r r r 2 13 = 1 and α > 0, γ 2 α 2 (r r r 2 13 ) = αγ Solve these two equations for ϒ and α. 13
14 Will the sign of the third row change if the sign of scale factor is reversed? 14
15 15
16 What parameters are missing? x o x = f x r 11 X w + r 12 Y w + r 13 Z w + T x r 31 X w + r 32 Y w + r 33 Z w + T z y o y = f y r 21 X w + r 22 Y w + r 23 Z w + T y r 31 X w + r 32 Y w + r 33 Z w + T z Determine the unknow sign for scale factor γ. Z c > 0 x(r 11 X w + r 12 Y w + r 13 Z w + T x ) > 0 and y(r 21 X w + r 22 Y w + r 23 Z w + T y ) > 0 This is true if virtual image plane is used, otherwise the sign has to be reversed. 16
17 x = f x r 11 X w + r 12 Y w + r 13 Z w + T x r 31 X w + r 32 Y w + r 33 Z w + T z x(r 31 X w + r 32 Y w + r 33 Z w + T z ) = f x (r 11 X w + r 12 Y w + r 13 Z w + T x ) xt z + f x (r 11 X w + r 12 Y w + r 13 Z w + T x ) = x(r 31 X w + r 32 Y w + r 33 Z w ) 17
18 [ x (r 11 X w + r 12 Y w + r 13 Z w + T x )] T z f x f x = x(r 31 X w + r 32 Y w + r 33 Z w ) A T z = b T z f x = (A T A) 1 A T b 18
19 x 1 (r 11 X W 1 + r 12 Y W 1 + r 13 Z W 1 + T x ) x A = 2 (r 11 X W 2 + r 12 Y W 2 + r 13 Z W 2 + T x ). x n (r 11 X W n + r 12 Y W n + r 13 Z W n + T x ) b = x 1 (r 31 X W 1 + r 32 Y W 1 + r 33 Z W 1 ) x 2 (r 31 X W 2 + r 32 Y W 2 + r 33 Z W 2 ) x n (r 31 X W n + r 32 Y W n + r 33 Z W n ) 19
20 Locate three vanishing points from three sets of mutually orthogonal parallel lines in space The image center is the orthocenter of the plane defined by the three vanishing points Position of the calibration pattern is critical One of the three mutually orthogonal directions can be nearly parallel to the image plane, which should be avoided Noise or inaccuracy of parallel lines cause problem Average results from several views of the calibration pattern 20

21 21
22 22
23 Camera Parameters from Projection Matrix 23
24 24
25 25
26 Again, A = UDV T and m is the column of V corresponding to the null singular value upto an unknown scale factor 26
27 Am = 0 A is a 2N 12 matrix. N 6 (6 pairs of x and y = 12) If N 11 and the N points are not coplanar, A has rank 11 and the homogeneous system has a nontrivial solution (unique up to an unknow scale factor). but becasue of image noise and inaccuracy in locating 2- D points. A could have the maximum rank (12). In this case, there will be no null singular value along the diagonal of D and the system would only have a trivial solution. In this case, we use the eigenvector corresponding to the smallest eigenvalue. 27
28 x o x = f x r 11 X w + r 12 Y w + r 13 Z w + T x r 31 X w + r 32 Y w + r 33 Z w + T z y o y = f y r 21 X w + r 22 Y w + r 23 Z w + T y r 31 X w + r 32 Y w + r 33 Z w + T z 28
29 f x r 11 + o x r 31 f x r 12 + o x r 32 f x r 13 + o x r 33 f x T x + o x T z M = f y r 21 + o y r 31 f y r 22 + o y r 32 f y r 23 + o y r 33 f y T y + o y T z r 31 r 32 r 33 T z 29
30 f x r 11 + o x r 31 f x r 12 + o x r 32 f x r 13 + o x r 33 f x T x + o x T z M = f y r 21 + o y r 31 f y r 22 + o y r 32 f y r 23 + o y r 33 f y T y + o y T z r 31 r 32 r 33 T z 30
31 31
32 [ f x r 11 + o x r 31 f x r 12 + o x r 32 f x r 13 + o x r 33 ][ r 31 r 32 r 33 ] T = o x [ f y r 21 + o y r 31 f y r 22 + o y r 32 f y r 23 + o y r ] 33 [ r 31 r 32 r 33 ] T = o y Why? Orthogonality. o x = [ m ˆ 11 m ˆ 12 m ˆ 13 ][ m ˆ 31 m ˆ 32 m ˆ 33 ] T o y = [ m ˆ 21 m ˆ 22 m ˆ 23 ][ m ˆ 31 m ˆ 32 m ˆ 33 ] T 32
33 q 1 = [ f x r 11 + o x r 31 f x r 12 + o x r 32 f x r 13 + o x r 33 ] q 2 = [ f y r 21 + o y r 31 f y r 22 + o y r 32 f y r 23 + o y r ] 33 f x = q 1 q T 1 o 2 x = [ m ˆ 11 m ˆ 12 m ˆ 13 ] T 2 [ m ˆ 11 m ˆ 12 m ˆ 13 ] o x f y = q 2 q T 2 o 2 y = [ m ˆ 21 m ˆ 22 m ˆ 23 ] T 2 [ m ˆ 21 m ˆ 22 m ˆ 23 ] o y 33
34 f x T x + o x T z = ˆ m 14 f y T x + o y T z = ˆ m 24 34
Geometric Camera Parameters
 Geometric Camera Parameters What assumptions have we made so far? -All equations we have derived for far are written in the camera reference frames. -These equations are valid only when: () all distances
Geometric Camera Parameters What assumptions have we made so far? -All equations we have derived for far are written in the camera reference frames. -These equations are valid only when: () all distances
1 2 3 1 1 2 x = + x 2 + x 4 1 0 1
 (d) If the vector b is the sum of the four columns of A, write down the complete solution to Ax = b. 1 2 3 1 1 2 x = + x 2 + x 4 1 0 0 1 0 1 2. (11 points) This problem finds the curve y = C + D 2 t which
(d) If the vector b is the sum of the four columns of A, write down the complete solution to Ax = b. 1 2 3 1 1 2 x = + x 2 + x 4 1 0 0 1 0 1 2. (11 points) This problem finds the curve y = C + D 2 t which
Least-Squares Intersection of Lines
 Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
Least-Squares Intersection of Lines Johannes Traa - UIUC 2013 This write-up derives the least-squares solution for the intersection of lines. In the general case, a set of lines will not intersect at a
Introduction Epipolar Geometry Calibration Methods Further Readings. Stereo Camera Calibration
 Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration 12.10.2004 Overview Introduction Summary / Motivation Depth Perception Ambiguity of Correspondence
Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration 12.10.2004 Overview Introduction Summary / Motivation Depth Perception Ambiguity of Correspondence
by the matrix A results in a vector which is a reflection of the given
 Eigenvalues & Eigenvectors Example Suppose Then So, geometrically, multiplying a vector in by the matrix A results in a vector which is a reflection of the given vector about the y-axis We observe that
Eigenvalues & Eigenvectors Example Suppose Then So, geometrically, multiplying a vector in by the matrix A results in a vector which is a reflection of the given vector about the y-axis We observe that
MAT 242 Test 2 SOLUTIONS, FORM T
 MAT 242 Test 2 SOLUTIONS, FORM T 5 3 5 3 3 3 3. Let v =, v 5 2 =, v 3 =, and v 5 4 =. 3 3 7 3 a. [ points] The set { v, v 2, v 3, v 4 } is linearly dependent. Find a nontrivial linear combination of these
MAT 242 Test 2 SOLUTIONS, FORM T 5 3 5 3 3 3 3. Let v =, v 5 2 =, v 3 =, and v 5 4 =. 3 3 7 3 a. [ points] The set { v, v 2, v 3, v 4 } is linearly dependent. Find a nontrivial linear combination of these
Lecture 5: Singular Value Decomposition SVD (1)
") EEM3L1: Numerical and Analytical Techniques Lecture 5: Singular Value Decomposition SVD (1) EE3L1, slide 1, Version 4: 25-Sep-02 Motivation for SVD (1) SVD = Singular Value Decomposition Consider the system
EEM3L1: Numerical and Analytical Techniques Lecture 5: Singular Value Decomposition SVD (1) EE3L1, slide 1, Version 4: 25-Sep-02 Motivation for SVD (1) SVD = Singular Value Decomposition Consider the system
Orthogonal Diagonalization of Symmetric Matrices
 MATH10212 Linear Algebra Brief lecture notes 57 Gram Schmidt Process enables us to find an orthogonal basis of a subspace. Let u 1,..., u k be a basis of a subspace V of R n. We begin the process of finding
MATH10212 Linear Algebra Brief lecture notes 57 Gram Schmidt Process enables us to find an orthogonal basis of a subspace. Let u 1,..., u k be a basis of a subspace V of R n. We begin the process of finding
State of Stress at Point
 State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
State of Stress at Point Einstein Notation The basic idea of Einstein notation is that a covector and a vector can form a scalar: This is typically written as an explicit sum: According to this convention,
Linear Algebra Review. Vectors
 Linear Algebra Review By Tim K. Marks UCSD Borrows heavily from: Jana Kosecka kosecka@cs.gmu.edu http://cs.gmu.edu/~kosecka/cs682.html Virginia de Sa Cogsci 8F Linear Algebra review UCSD Vectors The length
Linear Algebra Review By Tim K. Marks UCSD Borrows heavily from: Jana Kosecka kosecka@cs.gmu.edu http://cs.gmu.edu/~kosecka/cs682.html Virginia de Sa Cogsci 8F Linear Algebra review UCSD Vectors The length
DATA ANALYSIS II. Matrix Algorithms
 DATA ANALYSIS II Matrix Algorithms Similarity Matrix Given a dataset D = {x i }, i=1,..,n consisting of n points in R d, let A denote the n n symmetric similarity matrix between the points, given as where
DATA ANALYSIS II Matrix Algorithms Similarity Matrix Given a dataset D = {x i }, i=1,..,n consisting of n points in R d, let A denote the n n symmetric similarity matrix between the points, given as where
Chapter 6. Orthogonality
 6.3 Orthogonal Matrices 1 Chapter 6. Orthogonality 6.3 Orthogonal Matrices Definition 6.4. An n n matrix A is orthogonal if A T A = I. Note. We will see that the columns of an orthogonal matrix must be
6.3 Orthogonal Matrices 1 Chapter 6. Orthogonality 6.3 Orthogonal Matrices Definition 6.4. An n n matrix A is orthogonal if A T A = I. Note. We will see that the columns of an orthogonal matrix must be
Relating Vanishing Points to Catadioptric Camera Calibration
 Relating Vanishing Points to Catadioptric Camera Calibration Wenting Duan* a, Hui Zhang b, Nigel M. Allinson a a Laboratory of Vision Engineering, University of Lincoln, Brayford Pool, Lincoln, U.K. LN6
Relating Vanishing Points to Catadioptric Camera Calibration Wenting Duan* a, Hui Zhang b, Nigel M. Allinson a a Laboratory of Vision Engineering, University of Lincoln, Brayford Pool, Lincoln, U.K. LN6
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS. + + x 2. x n. a 11 a 12 a 1n b 1 a 21 a 22 a 2n b 2 a 31 a 32 a 3n b 3. a m1 a m2 a mn b m
 MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS 1. SYSTEMS OF EQUATIONS AND MATRICES 1.1. Representation of a linear system. The general system of m equations in n unknowns can be written a 11 x 1 + a 12 x 2 +
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS 1. SYSTEMS OF EQUATIONS AND MATRICES 1.1. Representation of a linear system. The general system of m equations in n unknowns can be written a 11 x 1 + a 12 x 2 +
DICOM Correction Item
 Correction Number DICOM Correction Item CP-626 Log Summary: Type of Modification Clarification Rationale for Correction Name of Standard PS 3.3 2004 + Sup 83 The description of pixel spacing related attributes
Correction Number DICOM Correction Item CP-626 Log Summary: Type of Modification Clarification Rationale for Correction Name of Standard PS 3.3 2004 + Sup 83 The description of pixel spacing related attributes
160 CHAPTER 4. VECTOR SPACES
 160 CHAPTER 4. VECTOR SPACES 4. Rank and Nullity In this section, we look at relationships between the row space, column space, null space of a matrix and its transpose. We will derive fundamental results
160 CHAPTER 4. VECTOR SPACES 4. Rank and Nullity In this section, we look at relationships between the row space, column space, null space of a matrix and its transpose. We will derive fundamental results
Wii Remote Calibration Using the Sensor Bar
 Wii Remote Calibration Using the Sensor Bar Alparslan Yildiz Abdullah Akay Yusuf Sinan Akgul GIT Vision Lab - http://vision.gyte.edu.tr Gebze Institute of Technology Kocaeli, Turkey {yildiz, akay, akgul}@bilmuh.gyte.edu.tr
Wii Remote Calibration Using the Sensor Bar Alparslan Yildiz Abdullah Akay Yusuf Sinan Akgul GIT Vision Lab - http://vision.gyte.edu.tr Gebze Institute of Technology Kocaeli, Turkey {yildiz, akay, akgul}@bilmuh.gyte.edu.tr
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS
 MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS Systems of Equations and Matrices Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS Systems of Equations and Matrices Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
Epipolar Geometry. Readings: See Sections 10.1 and 15.6 of Forsyth and Ponce. Right Image. Left Image. e(p ) Epipolar Lines. e(q ) q R.
 Epipolar Lines. e(q ) q R.") Epipolar Geometry We consider two perspective images of a scene as taken from a stereo pair of cameras (or equivalently, assume the scene is rigid and imaged with a single camera from two different locations).
Epipolar Geometry We consider two perspective images of a scene as taken from a stereo pair of cameras (or equivalently, assume the scene is rigid and imaged with a single camera from two different locations).
2-View Geometry. Mark Fiala Ryerson University Mark.fiala@ryerson.ca
 CRV 2010 Tutorial Day 2-View Geometry Mark Fiala Ryerson University Mark.fiala@ryerson.ca 3-Vectors for image points and lines Mark Fiala 2010 2D Homogeneous Points Add 3 rd number to a 2D point on image
CRV 2010 Tutorial Day 2-View Geometry Mark Fiala Ryerson University Mark.fiala@ryerson.ca 3-Vectors for image points and lines Mark Fiala 2010 2D Homogeneous Points Add 3 rd number to a 2D point on image
Bindel, Spring 2012 Intro to Scientific Computing (CS 3220) Week 3: Wednesday, Feb 8
 Week 3: Wednesday, Feb 8") Spaces and bases Week 3: Wednesday, Feb 8 I have two favorite vector spaces 1 : R n and the space P d of polynomials of degree at most d. For R n, we have a canonical basis: R n = span{e 1, e 2,..., e
Spaces and bases Week 3: Wednesday, Feb 8 I have two favorite vector spaces 1 : R n and the space P d of polynomials of degree at most d. For R n, we have a canonical basis: R n = span{e 1, e 2,..., e
Component Ordering in Independent Component Analysis Based on Data Power
 Component Ordering in Independent Component Analysis Based on Data Power Anne Hendrikse Raymond Veldhuis University of Twente University of Twente Fac. EEMCS, Signals and Systems Group Fac. EEMCS, Signals
Component Ordering in Independent Component Analysis Based on Data Power Anne Hendrikse Raymond Veldhuis University of Twente University of Twente Fac. EEMCS, Signals and Systems Group Fac. EEMCS, Signals
Lecture 2: Homogeneous Coordinates, Lines and Conics
 Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
Similarity and Diagonalization. Similar Matrices
 MATH022 Linear Algebra Brief lecture notes 48 Similarity and Diagonalization Similar Matrices Let A and B be n n matrices. We say that A is similar to B if there is an invertible n n matrix P such that
MATH022 Linear Algebra Brief lecture notes 48 Similarity and Diagonalization Similar Matrices Let A and B be n n matrices. We say that A is similar to B if there is an invertible n n matrix P such that
13 MATH FACTS 101. 2 a = 1. 7. The elements of a vector have a graphical interpretation, which is particularly easy to see in two or three dimensions.
 3 MATH FACTS 0 3 MATH FACTS 3. Vectors 3.. Definition We use the overhead arrow to denote a column vector, i.e., a linear segment with a direction. For example, in three-space, we write a vector in terms
3 MATH FACTS 0 3 MATH FACTS 3. Vectors 3.. Definition We use the overhead arrow to denote a column vector, i.e., a linear segment with a direction. For example, in three-space, we write a vector in terms
The Singular Value Decomposition in Symmetric (Löwdin) Orthogonalization and Data Compression
 Orthogonalization and Data Compression") The Singular Value Decomposition in Symmetric (Löwdin) Orthogonalization and Data Compression The SVD is the most generally applicable of the orthogonal-diagonal-orthogonal type matrix decompositions Every
The Singular Value Decomposition in Symmetric (Löwdin) Orthogonalization and Data Compression The SVD is the most generally applicable of the orthogonal-diagonal-orthogonal type matrix decompositions Every
Section 1.7 22 Continued
 Section 1.5 23 A homogeneous equation is always consistent. TRUE - The trivial solution is always a solution. The equation Ax = 0 gives an explicit descriptions of its solution set. FALSE - The equation
Section 1.5 23 A homogeneous equation is always consistent. TRUE - The trivial solution is always a solution. The equation Ax = 0 gives an explicit descriptions of its solution set. FALSE - The equation
MAT 200, Midterm Exam Solution. a. (5 points) Compute the determinant of the matrix A =
 Compute the determinant of the matrix A =") MAT 200, Midterm Exam Solution. (0 points total) a. (5 points) Compute the determinant of the matrix 2 2 0 A = 0 3 0 3 0 Answer: det A = 3. The most efficient way is to develop the determinant along the
MAT 200, Midterm Exam Solution. (0 points total) a. (5 points) Compute the determinant of the matrix 2 2 0 A = 0 3 0 3 0 Answer: det A = 3. The most efficient way is to develop the determinant along the
Similar matrices and Jordan form
 Similar matrices and Jordan form We ve nearly covered the entire heart of linear algebra once we ve finished singular value decompositions we ll have seen all the most central topics. A T A is positive
Similar matrices and Jordan form We ve nearly covered the entire heart of linear algebra once we ve finished singular value decompositions we ll have seen all the most central topics. A T A is positive
8 Square matrices continued: Determinants
 8 Square matrices continued: Determinants 8. Introduction Determinants give us important information about square matrices, and, as we ll soon see, are essential for the computation of eigenvalues. You
8 Square matrices continued: Determinants 8. Introduction Determinants give us important information about square matrices, and, as we ll soon see, are essential for the computation of eigenvalues. You
Daniel F. DeMenthon and Larry S. Davis. Center for Automation Research. University of Maryland
 Model-Based Object Pose in 25 Lines of Code Daniel F. DeMenthon and Larry S. Davis Computer Vision Laboratory Center for Automation Research University of Maryland College Park, MD 20742 Abstract In this
Model-Based Object Pose in 25 Lines of Code Daniel F. DeMenthon and Larry S. Davis Computer Vision Laboratory Center for Automation Research University of Maryland College Park, MD 20742 Abstract In this
The Geometry of Perspective Projection
 The Geometry o Perspective Projection Pinhole camera and perspective projection - This is the simplest imaging device which, however, captures accurately the geometry o perspective projection. -Rays o
The Geometry o Perspective Projection Pinhole camera and perspective projection - This is the simplest imaging device which, however, captures accurately the geometry o perspective projection. -Rays o
Nonlinear Iterative Partial Least Squares Method
 Numerical Methods for Determining Principal Component Analysis Abstract Factors Béchu, S., Richard-Plouet, M., Fernandez, V., Walton, J., and Fairley, N. (2016) Developments in numerical treatments for
Numerical Methods for Determining Principal Component Analysis Abstract Factors Béchu, S., Richard-Plouet, M., Fernandez, V., Walton, J., and Fairley, N. (2016) Developments in numerical treatments for
How To Analyze Ball Blur On A Ball Image
 Single Image 3D Reconstruction of Ball Motion and Spin From Motion Blur An Experiment in Motion from Blur Giacomo Boracchi, Vincenzo Caglioti, Alessandro Giusti Objective From a single image, reconstruct:
Single Image 3D Reconstruction of Ball Motion and Spin From Motion Blur An Experiment in Motion from Blur Giacomo Boracchi, Vincenzo Caglioti, Alessandro Giusti Objective From a single image, reconstruct:
Vector Math Computer Graphics Scott D. Anderson
 Vector Math Computer Graphics Scott D. Anderson 1 Dot Product The notation v w means the dot product or scalar product or inner product of two vectors, v and w. In abstract mathematics, we can talk about
Vector Math Computer Graphics Scott D. Anderson 1 Dot Product The notation v w means the dot product or scalar product or inner product of two vectors, v and w. In abstract mathematics, we can talk about
Recall that two vectors in are perpendicular or orthogonal provided that their dot
 Orthogonal Complements and Projections Recall that two vectors in are perpendicular or orthogonal provided that their dot product vanishes That is, if and only if Example 1 The vectors in are orthogonal
Orthogonal Complements and Projections Recall that two vectors in are perpendicular or orthogonal provided that their dot product vanishes That is, if and only if Example 1 The vectors in are orthogonal
Au = = = 3u. Aw = = = 2w. so the action of A on u and w is very easy to picture: it simply amounts to a stretching by 3 and 2, respectively.
 Chapter 7 Eigenvalues and Eigenvectors In this last chapter of our exploration of Linear Algebra we will revisit eigenvalues and eigenvectors of matrices, concepts that were already introduced in Geometry
Chapter 7 Eigenvalues and Eigenvectors In this last chapter of our exploration of Linear Algebra we will revisit eigenvalues and eigenvectors of matrices, concepts that were already introduced in Geometry
Inner Product Spaces and Orthogonality
 Inner Product Spaces and Orthogonality week 3-4 Fall 2006 Dot product of R n The inner product or dot product of R n is a function, defined by u, v a b + a 2 b 2 + + a n b n for u a, a 2,, a n T, v b,
Inner Product Spaces and Orthogonality week 3-4 Fall 2006 Dot product of R n The inner product or dot product of R n is a function, defined by u, v a b + a 2 b 2 + + a n b n for u a, a 2,, a n T, v b,
Solving Systems of Linear Equations
 LECTURE 5 Solving Systems of Linear Equations Recall that we introduced the notion of matrices as a way of standardizing the expression of systems of linear equations In today s lecture I shall show how
LECTURE 5 Solving Systems of Linear Equations Recall that we introduced the notion of matrices as a way of standardizing the expression of systems of linear equations In today s lecture I shall show how
Numerical Analysis Lecture Notes
 Numerical Analysis Lecture Notes Peter J. Olver 6. Eigenvalues and Singular Values In this section, we collect together the basic facts about eigenvalues and eigenvectors. From a geometrical viewpoint,
Numerical Analysis Lecture Notes Peter J. Olver 6. Eigenvalues and Singular Values In this section, we collect together the basic facts about eigenvalues and eigenvectors. From a geometrical viewpoint,
Solutions to Math 51 First Exam January 29, 2015
 Solutions to Math 5 First Exam January 29, 25. ( points) (a) Complete the following sentence: A set of vectors {v,..., v k } is defined to be linearly dependent if (2 points) there exist c,... c k R, not
Solutions to Math 5 First Exam January 29, 25. ( points) (a) Complete the following sentence: A set of vectors {v,..., v k } is defined to be linearly dependent if (2 points) there exist c,... c k R, not
Solving Systems of Linear Equations
 LECTURE 5 Solving Systems of Linear Equations Recall that we introduced the notion of matrices as a way of standardizing the expression of systems of linear equations In today s lecture I shall show how
LECTURE 5 Solving Systems of Linear Equations Recall that we introduced the notion of matrices as a way of standardizing the expression of systems of linear equations In today s lecture I shall show how
A Flexible New Technique for Camera Calibration
 A Flexible New Technique for Camera Calibration Zhengyou Zhang December 2, 1998 (updated on December 14, 1998) (updated on March 25, 1999) (updated on Aug. 1, 22; a typo in Appendix B) (updated on Aug.
A Flexible New Technique for Camera Calibration Zhengyou Zhang December 2, 1998 (updated on December 14, 1998) (updated on March 25, 1999) (updated on Aug. 1, 22; a typo in Appendix B) (updated on Aug.
ISOMETRIES OF R n KEITH CONRAD
 ISOMETRIES OF R n KEITH CONRAD 1. Introduction An isometry of R n is a function h: R n R n that preserves the distance between vectors: h(v) h(w) = v w for all v and w in R n, where (x 1,..., x n ) = x
ISOMETRIES OF R n KEITH CONRAD 1. Introduction An isometry of R n is a function h: R n R n that preserves the distance between vectors: h(v) h(w) = v w for all v and w in R n, where (x 1,..., x n ) = x
[1] Diagonal factorization
![[1] Diagonal factorization](/thumbs/40/21671034.jpg "[1] Diagonal factorization") 8.03 LA.6: Diagonalization and Orthogonal Matrices [ Diagonal factorization [2 Solving systems of first order differential equations [3 Symmetric and Orthonormal Matrices [ Diagonal factorization Recall:
8.03 LA.6: Diagonalization and Orthogonal Matrices [ Diagonal factorization [2 Solving systems of first order differential equations [3 Symmetric and Orthonormal Matrices [ Diagonal factorization Recall:
MATH 423 Linear Algebra II Lecture 38: Generalized eigenvectors. Jordan canonical form (continued).
.") MATH 423 Linear Algebra II Lecture 38: Generalized eigenvectors Jordan canonical form (continued) Jordan canonical form A Jordan block is a square matrix of the form λ 1 0 0 0 0 λ 1 0 0 0 0 λ 0 0 J = 0
MATH 423 Linear Algebra II Lecture 38: Generalized eigenvectors Jordan canonical form (continued) Jordan canonical form A Jordan block is a square matrix of the form λ 1 0 0 0 0 λ 1 0 0 0 0 λ 0 0 J = 0
Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Sample Exam Questions 2007
 Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Questions 2007 INSTRUCTIONS: Answer all questions. Spend approximately 1 minute per mark. Question 1 30 Marks Total
Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Questions 2007 INSTRUCTIONS: Answer all questions. Spend approximately 1 minute per mark. Question 1 30 Marks Total
Solving Simultaneous Equations and Matrices
 Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Review Jeopardy. Blue vs. Orange. Review Jeopardy
 Review Jeopardy Blue vs. Orange Review Jeopardy Jeopardy Round Lectures 0-3 Jeopardy Round $200 How could I measure how far apart (i.e. how different) two observations, y 1 and y 2, are from each other?
Review Jeopardy Blue vs. Orange Review Jeopardy Jeopardy Round Lectures 0-3 Jeopardy Round $200 How could I measure how far apart (i.e. how different) two observations, y 1 and y 2, are from each other?
SALEM COMMUNITY COLLEGE Carneys Point, New Jersey 08069 COURSE SYLLABUS COVER SHEET. Action Taken (Please Check One) New Course Initiated
 New Course Initiated") SALEM COMMUNITY COLLEGE Carneys Point, New Jersey 08069 COURSE SYLLABUS COVER SHEET Course Title Course Number Department Linear Algebra Mathematics MAT-240 Action Taken (Please Check One) New Course Initiated
SALEM COMMUNITY COLLEGE Carneys Point, New Jersey 08069 COURSE SYLLABUS COVER SHEET Course Title Course Number Department Linear Algebra Mathematics MAT-240 Action Taken (Please Check One) New Course Initiated
Chapter 17. Orthogonal Matrices and Symmetries of Space
 Chapter 17. Orthogonal Matrices and Symmetries of Space Take a random matrix, say 1 3 A = 4 5 6, 7 8 9 and compare the lengths of e 1 and Ae 1. The vector e 1 has length 1, while Ae 1 = (1, 4, 7) has length
Chapter 17. Orthogonal Matrices and Symmetries of Space Take a random matrix, say 1 3 A = 4 5 6, 7 8 9 and compare the lengths of e 1 and Ae 1. The vector e 1 has length 1, while Ae 1 = (1, 4, 7) has length
Methods for Finding Bases
 Methods for Finding Bases Bases for the subspaces of a matrix Row-reduction methods can be used to find bases. Let us now look at an example illustrating how to obtain bases for the row space, null space,
Methods for Finding Bases Bases for the subspaces of a matrix Row-reduction methods can be used to find bases. Let us now look at an example illustrating how to obtain bases for the row space, null space,
Metric Measurements on a Plane from a Single Image
 TR26-579, Dartmouth College, Computer Science Metric Measurements on a Plane from a Single Image Micah K. Johnson and Hany Farid Department of Computer Science Dartmouth College Hanover NH 3755 Abstract
TR26-579, Dartmouth College, Computer Science Metric Measurements on a Plane from a Single Image Micah K. Johnson and Hany Farid Department of Computer Science Dartmouth College Hanover NH 3755 Abstract
EXPERIMENTAL EVALUATION OF RELATIVE POSE ESTIMATION ALGORITHMS
 EXPERIMENTAL EVALUATION OF RELATIVE POSE ESTIMATION ALGORITHMS Marcel Brückner, Ferid Bajramovic, Joachim Denzler Chair for Computer Vision, Friedrich-Schiller-University Jena, Ernst-Abbe-Platz, 7743 Jena,
EXPERIMENTAL EVALUATION OF RELATIVE POSE ESTIMATION ALGORITHMS Marcel Brückner, Ferid Bajramovic, Joachim Denzler Chair for Computer Vision, Friedrich-Schiller-University Jena, Ernst-Abbe-Platz, 7743 Jena,
Geometric Transformation CS 211A
 Geometric Transformation CS 211A What is transformation? Moving points (x,y) moves to (x+t, y+t) Can be in any dimension 2D Image warps 3D 3D Graphics and Vision Can also be considered as a movement to
Geometric Transformation CS 211A What is transformation? Moving points (x,y) moves to (x+t, y+t) Can be in any dimension 2D Image warps 3D 3D Graphics and Vision Can also be considered as a movement to
3D Scanner using Line Laser. 1. Introduction. 2. Theory
 . Introduction 3D Scanner using Line Laser Di Lu Electrical, Computer, and Systems Engineering Rensselaer Polytechnic Institute The goal of 3D reconstruction is to recover the 3D properties of a geometric
. Introduction 3D Scanner using Line Laser Di Lu Electrical, Computer, and Systems Engineering Rensselaer Polytechnic Institute The goal of 3D reconstruction is to recover the 3D properties of a geometric
Matrix Calculations: Applications of Eigenvalues and Eigenvectors; Inner Products
 Matrix Calculations: Applications of Eigenvalues and Eigenvectors; Inner Products H. Geuvers Institute for Computing and Information Sciences Intelligent Systems Version: spring 2015 H. Geuvers Version:
Matrix Calculations: Applications of Eigenvalues and Eigenvectors; Inner Products H. Geuvers Institute for Computing and Information Sciences Intelligent Systems Version: spring 2015 H. Geuvers Version:
Notes on Orthogonal and Symmetric Matrices MENU, Winter 2013
 Notes on Orthogonal and Symmetric Matrices MENU, Winter 201 These notes summarize the main properties and uses of orthogonal and symmetric matrices. We covered quite a bit of material regarding these topics,
Notes on Orthogonal and Symmetric Matrices MENU, Winter 201 These notes summarize the main properties and uses of orthogonal and symmetric matrices. We covered quite a bit of material regarding these topics,
Eigenvalues, Eigenvectors, Matrix Factoring, and Principal Components
 Eigenvalues, Eigenvectors, Matrix Factoring, and Principal Components The eigenvalues and eigenvectors of a square matrix play a key role in some important operations in statistics. In particular, they
Eigenvalues, Eigenvectors, Matrix Factoring, and Principal Components The eigenvalues and eigenvectors of a square matrix play a key role in some important operations in statistics. In particular, they
Factor analysis. Angela Montanari
 Factor analysis Angela Montanari 1 Introduction Factor analysis is a statistical model that allows to explain the correlations between a large number of observed correlated variables through a small number
Factor analysis Angela Montanari 1 Introduction Factor analysis is a statistical model that allows to explain the correlations between a large number of observed correlated variables through a small number
DETECTION OF PLANAR PATCHES IN HANDHELD IMAGE SEQUENCES
 DETECTION OF PLANAR PATCHES IN HANDHELD IMAGE SEQUENCES Olaf Kähler, Joachim Denzler Friedrich-Schiller-University, Dept. Mathematics and Computer Science, 07743 Jena, Germany {kaehler,denzler}@informatik.uni-jena.de
DETECTION OF PLANAR PATCHES IN HANDHELD IMAGE SEQUENCES Olaf Kähler, Joachim Denzler Friedrich-Schiller-University, Dept. Mathematics and Computer Science, 07743 Jena, Germany {kaehler,denzler}@informatik.uni-jena.de
Optical Tracking Using Projective Invariant Marker Pattern Properties
 Optical Tracking Using Projective Invariant Marker Pattern Properties Robert van Liere, Jurriaan D. Mulder Department of Information Systems Center for Mathematics and Computer Science Amsterdam, the Netherlands
Optical Tracking Using Projective Invariant Marker Pattern Properties Robert van Liere, Jurriaan D. Mulder Department of Information Systems Center for Mathematics and Computer Science Amsterdam, the Netherlands
Rotation Matrices and Homogeneous Transformations
 Rotation Matrices and Homogeneous Transformations A coordinate frame in an n-dimensional space is defined by n mutually orthogonal unit vectors. In particular, for a two-dimensional (2D) space, i.e., n
Rotation Matrices and Homogeneous Transformations A coordinate frame in an n-dimensional space is defined by n mutually orthogonal unit vectors. In particular, for a two-dimensional (2D) space, i.e., n
Applied Linear Algebra I Review page 1
 Applied Linear Algebra Review 1 I. Determinants A. Definition of a determinant 1. Using sum a. Permutations i. Sign of a permutation ii. Cycle 2. Uniqueness of the determinant function in terms of properties
Applied Linear Algebra Review 1 I. Determinants A. Definition of a determinant 1. Using sum a. Permutations i. Sign of a permutation ii. Cycle 2. Uniqueness of the determinant function in terms of properties
LINEAR ALGEBRA W W L CHEN
 LINEAR ALGEBRA W W L CHEN c W W L Chen, 1997, 2008 This chapter is available free to all individuals, on understanding that it is not to be used for financial gain, and may be downloaded and/or photocopied,
LINEAR ALGEBRA W W L CHEN c W W L Chen, 1997, 2008 This chapter is available free to all individuals, on understanding that it is not to be used for financial gain, and may be downloaded and/or photocopied,
Eigenvalues and Eigenvectors
 Chapter 6 Eigenvalues and Eigenvectors 6. Introduction to Eigenvalues Linear equations Ax D b come from steady state problems. Eigenvalues have their greatest importance in dynamic problems. The solution
Chapter 6 Eigenvalues and Eigenvectors 6. Introduction to Eigenvalues Linear equations Ax D b come from steady state problems. Eigenvalues have their greatest importance in dynamic problems. The solution
NCSS Statistical Software Principal Components Regression. In ordinary least squares, the regression coefficients are estimated using the formula ( )
") Chapter 340 Principal Components Regression Introduction is a technique for analyzing multiple regression data that suffer from multicollinearity. When multicollinearity occurs, least squares estimates
Chapter 340 Principal Components Regression Introduction is a technique for analyzing multiple regression data that suffer from multicollinearity. When multicollinearity occurs, least squares estimates
Systems of Linear Equations
 Systems of Linear Equations Beifang Chen Systems of linear equations Linear systems A linear equation in variables x, x,, x n is an equation of the form a x + a x + + a n x n = b, where a, a,, a n and
Systems of Linear Equations Beifang Chen Systems of linear equations Linear systems A linear equation in variables x, x,, x n is an equation of the form a x + a x + + a n x n = b, where a, a,, a n and
V-PITS : VIDEO BASED PHONOMICROSURGERY INSTRUMENT TRACKING SYSTEM. Ketan Surender
 V-PITS : VIDEO BASED PHONOMICROSURGERY INSTRUMENT TRACKING SYSTEM by Ketan Surender A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science (Electrical Engineering)
V-PITS : VIDEO BASED PHONOMICROSURGERY INSTRUMENT TRACKING SYSTEM by Ketan Surender A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science (Electrical Engineering)
Examination paper for TMA4115 Matematikk 3
 Department of Mathematical Sciences Examination paper for TMA45 Matematikk 3 Academic contact during examination: Antoine Julien a, Alexander Schmeding b, Gereon Quick c Phone: a 73 59 77 82, b 40 53 99
Department of Mathematical Sciences Examination paper for TMA45 Matematikk 3 Academic contact during examination: Antoine Julien a, Alexander Schmeding b, Gereon Quick c Phone: a 73 59 77 82, b 40 53 99
Applied Linear Algebra
 Applied Linear Algebra OTTO BRETSCHER http://www.prenhall.com/bretscher Chapter 7 Eigenvalues and Eigenvectors Chia-Hui Chang Email: chia@csie.ncu.edu.tw National Central University, Taiwan 7.1 DYNAMICAL
Applied Linear Algebra OTTO BRETSCHER http://www.prenhall.com/bretscher Chapter 7 Eigenvalues and Eigenvectors Chia-Hui Chang Email: chia@csie.ncu.edu.tw National Central University, Taiwan 7.1 DYNAMICAL
Math 550 Notes. Chapter 7. Jesse Crawford. Department of Mathematics Tarleton State University. Fall 2010
 Math 550 Notes Chapter 7 Jesse Crawford Department of Mathematics Tarleton State University Fall 2010 (Tarleton State University) Math 550 Chapter 7 Fall 2010 1 / 34 Outline 1 Self-Adjoint and Normal Operators
Math 550 Notes Chapter 7 Jesse Crawford Department of Mathematics Tarleton State University Fall 2010 (Tarleton State University) Math 550 Chapter 7 Fall 2010 1 / 34 Outline 1 Self-Adjoint and Normal Operators
Dimensionality Reduction: Principal Components Analysis
 Dimensionality Reduction: Principal Components Analysis In data mining one often encounters situations where there are a large number of variables in the database. In such situations it is very likely
Dimensionality Reduction: Principal Components Analysis In data mining one often encounters situations where there are a large number of variables in the database. In such situations it is very likely
B4 Computational Geometry
 3CG 2006 / B4 Computational Geometry David Murray david.murray@eng.o.ac.uk www.robots.o.ac.uk/ dwm/courses/3cg Michaelmas 2006 3CG 2006 2 / Overview Computational geometry is concerned with the derivation
3CG 2006 / B4 Computational Geometry David Murray david.murray@eng.o.ac.uk www.robots.o.ac.uk/ dwm/courses/3cg Michaelmas 2006 3CG 2006 2 / Overview Computational geometry is concerned with the derivation
Real-time 3D Scanning System for Pavement Distortion Inspection
 Real-time 3D Scanning System for Pavement Distortion Inspection Bugao Xu, Ph.D. & Professor University of Texas at Austin Center for Transportation Research Austin, Texas 78712 Pavement distress categories
Real-time 3D Scanning System for Pavement Distortion Inspection Bugao Xu, Ph.D. & Professor University of Texas at Austin Center for Transportation Research Austin, Texas 78712 Pavement distress categories
LINEAR ALGEBRA. September 23, 2010
 LINEAR ALGEBRA September 3, 00 Contents 0. LU-decomposition.................................... 0. Inverses and Transposes................................. 0.3 Column Spaces and NullSpaces.............................
LINEAR ALGEBRA September 3, 00 Contents 0. LU-decomposition.................................... 0. Inverses and Transposes................................. 0.3 Column Spaces and NullSpaces.............................
Linear algebra and the geometry of quadratic equations. Similarity transformations and orthogonal matrices
 MATH 30 Differential Equations Spring 006 Linear algebra and the geometry of quadratic equations Similarity transformations and orthogonal matrices First, some things to recall from linear algebra Two
MATH 30 Differential Equations Spring 006 Linear algebra and the geometry of quadratic equations Similarity transformations and orthogonal matrices First, some things to recall from linear algebra Two
University of Lille I PC first year list of exercises n 7. Review
 University of Lille I PC first year list of exercises n 7 Review Exercise Solve the following systems in 4 different ways (by substitution, by the Gauss method, by inverting the matrix of coefficients
University of Lille I PC first year list of exercises n 7 Review Exercise Solve the following systems in 4 different ways (by substitution, by the Gauss method, by inverting the matrix of coefficients
521493S Computer Graphics. Exercise 2 & course schedule change
 521493S Computer Graphics Exercise 2 & course schedule change Course Schedule Change Lecture from Wednesday 31th of March is moved to Tuesday 30th of March at 16-18 in TS128 Question 2.1 Given two nonparallel,
521493S Computer Graphics Exercise 2 & course schedule change Course Schedule Change Lecture from Wednesday 31th of March is moved to Tuesday 30th of March at 16-18 in TS128 Question 2.1 Given two nonparallel,
Epipolar Geometry and Visual Servoing
 Epipolar Geometry and Visual Servoing Domenico Prattichizzo joint with with Gian Luca Mariottini and Jacopo Piazzi www.dii.unisi.it/prattichizzo Robotics & Systems Lab University of Siena, Italy Scuoladi
Epipolar Geometry and Visual Servoing Domenico Prattichizzo joint with with Gian Luca Mariottini and Jacopo Piazzi www.dii.unisi.it/prattichizzo Robotics & Systems Lab University of Siena, Italy Scuoladi
x + y + z = 1 2x + 3y + 4z = 0 5x + 6y + 7z = 3
 Math 24 FINAL EXAM (2/9/9 - SOLUTIONS ( Find the general solution to the system of equations 2 4 5 6 7 ( r 2 2r r 2 r 5r r x + y + z 2x + y + 4z 5x + 6y + 7z 2 2 2 2 So x z + y 2z 2 and z is free. ( r
Math 24 FINAL EXAM (2/9/9 - SOLUTIONS ( Find the general solution to the system of equations 2 4 5 6 7 ( r 2 2r r 2 r 5r r x + y + z 2x + y + 4z 5x + 6y + 7z 2 2 2 2 So x z + y 2z 2 and z is free. ( r
Recall the basic property of the transpose (for any A): v A t Aw = v w, v, w R n.
: v A t Aw = v w, v, w R n.") ORTHOGONAL MATRICES Informally, an orthogonal n n matrix is the n-dimensional analogue of the rotation matrices R θ in R 2. When does a linear transformation of R 3 (or R n ) deserve to be called a rotation?
ORTHOGONAL MATRICES Informally, an orthogonal n n matrix is the n-dimensional analogue of the rotation matrices R θ in R 2. When does a linear transformation of R 3 (or R n ) deserve to be called a rotation?
How To Use Trackeye
 Product information Image Systems AB Main office: Ågatan 40, SE-582 22 Linköping Phone +46 13 200 100, fax +46 13 200 150 info@imagesystems.se, Introduction TrackEye is the world leading system for motion
Product information Image Systems AB Main office: Ågatan 40, SE-582 22 Linköping Phone +46 13 200 100, fax +46 13 200 150 info@imagesystems.se, Introduction TrackEye is the world leading system for motion
Linear Equations in Linear Algebra
 1 Linear Equations in Linear Algebra 1.5 SOLUTION SETS OF LINEAR SYSTEMS HOMOGENEOUS LINEAR SYSTEMS A system of linear equations is said to be homogeneous if it can be written in the form A 0, where A
1 Linear Equations in Linear Algebra 1.5 SOLUTION SETS OF LINEAR SYSTEMS HOMOGENEOUS LINEAR SYSTEMS A system of linear equations is said to be homogeneous if it can be written in the form A 0, where A
Subspace Analysis and Optimization for AAM Based Face Alignment
 Subspace Analysis and Optimization for AAM Based Face Alignment Ming Zhao Chun Chen College of Computer Science Zhejiang University Hangzhou, 310027, P.R.China zhaoming1999@zju.edu.cn Stan Z. Li Microsoft
Subspace Analysis and Optimization for AAM Based Face Alignment Ming Zhao Chun Chen College of Computer Science Zhejiang University Hangzhou, 310027, P.R.China zhaoming1999@zju.edu.cn Stan Z. Li Microsoft
CHAPTER 8 FACTOR EXTRACTION BY MATRIX FACTORING TECHNIQUES. From Exploratory Factor Analysis Ledyard R Tucker and Robert C.
 CHAPTER 8 FACTOR EXTRACTION BY MATRIX FACTORING TECHNIQUES From Exploratory Factor Analysis Ledyard R Tucker and Robert C MacCallum 1997 180 CHAPTER 8 FACTOR EXTRACTION BY MATRIX FACTORING TECHNIQUES In
CHAPTER 8 FACTOR EXTRACTION BY MATRIX FACTORING TECHNIQUES From Exploratory Factor Analysis Ledyard R Tucker and Robert C MacCallum 1997 180 CHAPTER 8 FACTOR EXTRACTION BY MATRIX FACTORING TECHNIQUES In
Linear Algebra I. Ronald van Luijk, 2012
 Linear Algebra I Ronald van Luijk, 2012 With many parts from Linear Algebra I by Michael Stoll, 2007 Contents 1. Vector spaces 3 1.1. Examples 3 1.2. Fields 4 1.3. The field of complex numbers. 6 1.4.
Linear Algebra I Ronald van Luijk, 2012 With many parts from Linear Algebra I by Michael Stoll, 2007 Contents 1. Vector spaces 3 1.1. Examples 3 1.2. Fields 4 1.3. The field of complex numbers. 6 1.4.
Notes on the representational possibilities of projective quadrics in four dimensions
 bacso 2006/6/22 18:13 page 167 #1 4/1 (2006), 167 177 tmcs@inf.unideb.hu http://tmcs.math.klte.hu Notes on the representational possibilities of projective quadrics in four dimensions Sándor Bácsó and
bacso 2006/6/22 18:13 page 167 #1 4/1 (2006), 167 177 tmcs@inf.unideb.hu http://tmcs.math.klte.hu Notes on the representational possibilities of projective quadrics in four dimensions Sándor Bácsó and
Rank one SVD: un algorithm pour la visualisation d une matrice non négative
 Rank one SVD: un algorithm pour la visualisation d une matrice non négative L. Labiod and M. Nadif LIPADE - Universite ParisDescartes, France ECAIS 2013 November 7, 2013 Outline Outline 1 Data visualization
Rank one SVD: un algorithm pour la visualisation d une matrice non négative L. Labiod and M. Nadif LIPADE - Universite ParisDescartes, France ECAIS 2013 November 7, 2013 Outline Outline 1 Data visualization
Numerical Analysis Lecture Notes
 Numerical Analysis Lecture Notes Peter J. Olver 5. Inner Products and Norms The norm of a vector is a measure of its size. Besides the familiar Euclidean norm based on the dot product, there are a number
Numerical Analysis Lecture Notes Peter J. Olver 5. Inner Products and Norms The norm of a vector is a measure of its size. Besides the familiar Euclidean norm based on the dot product, there are a number
An Efficient Solution to the Five-Point Relative Pose Problem
 An Efficient Solution to the Five-Point Relative Pose Problem David Nistér Sarnoff Corporation CN5300, Princeton, NJ 08530 dnister@sarnoff.com Abstract An efficient algorithmic solution to the classical
An Efficient Solution to the Five-Point Relative Pose Problem David Nistér Sarnoff Corporation CN5300, Princeton, NJ 08530 dnister@sarnoff.com Abstract An efficient algorithmic solution to the classical
Vector Notation: AB represents the vector from point A to point B on a graph. The vector can be computed by B A.
 1 Linear Transformations Prepared by: Robin Michelle King A transformation of an object is a change in position or dimension (or both) of the object. The resulting object after the transformation is called
1 Linear Transformations Prepared by: Robin Michelle King A transformation of an object is a change in position or dimension (or both) of the object. The resulting object after the transformation is called
Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain
 92.222 - Linear Algebra II - Spring 2004 by D. Klain") Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain 1. Orthogonal matrices and orthonormal sets An n n real-valued matrix A is said to be an orthogonal
Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain 1. Orthogonal matrices and orthonormal sets An n n real-valued matrix A is said to be an orthogonal
Lecture L3 - Vectors, Matrices and Coordinate Transformations
 S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
Multidimensional data and factorial methods
 Multidimensional data and factorial methods Bidimensional data x 5 4 3 4 X 3 6 X 3 5 4 3 3 3 4 5 6 x Cartesian plane Multidimensional data n X x x x n X x x x n X m x m x m x nm Factorial plane Interpretation
Multidimensional data and factorial methods Bidimensional data x 5 4 3 4 X 3 6 X 3 5 4 3 3 3 4 5 6 x Cartesian plane Multidimensional data n X x x x n X x x x n X m x m x m x nm Factorial plane Interpretation
2. SPATIAL TRANSFORMATIONS
 Digitales Video 1 2. SPATIAL TRANSFORMATIONS This chapter describes common spatial transformations derived for digital image warping applications in computer vision and computer graphics. A spatial transformation
Digitales Video 1 2. SPATIAL TRANSFORMATIONS This chapter describes common spatial transformations derived for digital image warping applications in computer vision and computer graphics. A spatial transformation
MA106 Linear Algebra lecture notes
 MA106 Linear Algebra lecture notes Lecturers: Martin Bright and Daan Krammer Warwick, January 2011 Contents 1 Number systems and fields 3 1.1 Axioms for number systems......................... 3 2 Vector
MA106 Linear Algebra lecture notes Lecturers: Martin Bright and Daan Krammer Warwick, January 2011 Contents 1 Number systems and fields 3 1.1 Axioms for number systems......................... 3 2 Vector
Interactive 3D Scanning Without Tracking
 Interactive 3D Scanning Without Tracking Matthew J. Leotta, Austin Vandergon, Gabriel Taubin Brown University Division of Engineering Providence, RI 02912, USA {matthew leotta, aev, taubin}@brown.edu Abstract
Interactive 3D Scanning Without Tracking Matthew J. Leotta, Austin Vandergon, Gabriel Taubin Brown University Division of Engineering Providence, RI 02912, USA {matthew leotta, aev, taubin}@brown.edu Abstract
Orthogonal Projections
 Orthogonal Projections and Reflections (with exercises) by D. Klain Version.. Corrections and comments are welcome! Orthogonal Projections Let X,..., X k be a family of linearly independent (column) vectors
Orthogonal Projections and Reflections (with exercises) by D. Klain Version.. Corrections and comments are welcome! Orthogonal Projections Let X,..., X k be a family of linearly independent (column) vectors
1 VECTOR SPACES AND SUBSPACES
 1 VECTOR SPACES AND SUBSPACES What is a vector? Many are familiar with the concept of a vector as: Something which has magnitude and direction. an ordered pair or triple. a description for quantities such
1 VECTOR SPACES AND SUBSPACES What is a vector? Many are familiar with the concept of a vector as: Something which has magnitude and direction. an ordered pair or triple. a description for quantities such