Image Representation and Description
|
|
|
- Paula Hardy
- 7 years ago
- Views:
Transcription
1 Lecture Image Representation and Description Shahram Ebadollahi 4/5/8 DIP ELEN E483
2 Image Description Recognition High-level Image Representation Image Understanding 4/5/8
3 Lecture Outline Image Description Shape Descriptors Texture & Texture Descriptors SIFT Motion Descriptors Color Descriptors 4/5/8 3
4 Shape Description Shape Represented by its Boundary Shape Numbers Fourier Descriptors Statistical Moments Shape Represented by its Interior Topological Descriptors Moment Invariants 4/5/8 4
5 Boundary Representation: Freeman Chain Code Boundary representation Original boundary Sub-sampled boundary Chain code of boundary Chain code for 4-neighborhood Chain code for 8-neighborhood 4/5/8 5

6 Chain Code: example 8-directional chain code Starting point normalized chain code Rotation normalized chain code First difference of chain code 4/5/8 6
7 Shape Number A boundary descriptor 4/5/8 7
8 4/5/8 8 + K jy x s / K u e s u a K K u j π / K e u a K s K u K u j π Fourier Descriptor Boundary descriptor Fourier

9 Boundary Reconstruction using Fourier Descriptors % 5% % 5% 868 descriptors Only 8 descriptors.5%.5%.63%.8% 4/5/8 9
10 Boundary Representation: Signatures Represent -D boundary shape using -D signature signal 4/5/8

11 Boundary Representation: Signatures 4/5/8
12 Boundary Description using Statistical Moments A n µ n v vi m p vi n-th moment of v i A m i v p i v i 4/5/8
13 Region Descriptors - Simple Area Perimeter Compactness Circularity Ratio Mean/Median intensity Max/Min intensity Normalized area R c P A / 4π Area of circle with same perimeter as the shape C : R c : r perimeter /Area r b ab 4π 5π π π r 4/5/8 3
14 4/5/8 4


15 Topological Region Descriptors Topological properties: Properties of image preserved under rubber-sheet distortions H: # holes in the image C: # connected components H C E- E C-H: Euler Number H C3 E3 V Q + F C H E H C E H C E- 4/5/8 5
16 Geometric Moment Invariants m m p q x y f x y dxdy pq pq M N x y x p p+q-th D geometric moment y q f x y Projection of fxy onto monomial x p y q Why use moments? Geometric moments of different orders represent spatial characteristics of the image intensity distribution m Total intensity of image. For binary image area x y m m / m / m Intensity centroid binary image geometrical center 4/5/8 6
17 Central Moments µ pq M N x y p q x x y y f x y [Translation invariance] µ m µ µ µ µ µ Variance about the centroid covariance Scaled Central Moment λ µ ' / pq pq µ ' p+ q+ / Scale and translation invariant µ pq ' pq p+ q+ α µ Normalized Un-Scaled Central Moment η p+ q+ / pq µ pq µ 4/5/8 7 /

18 Moment Invariants translation scale mirroring rotation φ + η η φ + η φ η η 4 3 η3 η + η η3 4 η3 + η + η η3 φ + φ 5 φ 6 φ 7 ϕ η + η 4/5/8 8
19 Affine Transform & Affine Moment Invariants x' T x y' T y x y x y x' y' m m r r m m r r a b r r x x r r y y In practice: bilinear transform 4 pairs of corresponding points needed to find coefficients In practice: affine transform 3 pairs of corresponding points needed to find coefficients x' a + ax + a y + a3xy ' b + b x + b y + b xy y 3 x' a + ax + a y ' b + b x + b y y Rotation: Scale: Sew: x ' x cosφ + y sin φ y ' xsinφ + y cosφ x ' ax y ' by x ' x + y tanφ y ' y 4/5/8 9
20 Elliptical Shape Descriptors I I Principal moment of inertia: µ + µ + [ µ µ µ + µ [ µ µ + 4µ ] / + 4µ ] / Image ellipse characterizes fundamental shape features and also D position and orientation I + I m / I I / I + I spreadness elongation θ.5 tan µ µ µ θ a I µ b I µ / / / / 4/5/8



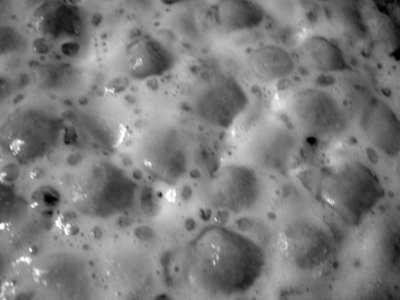










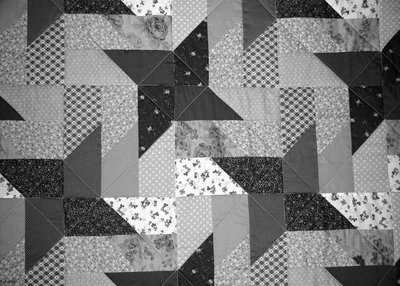

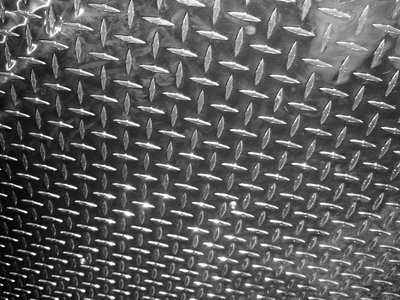



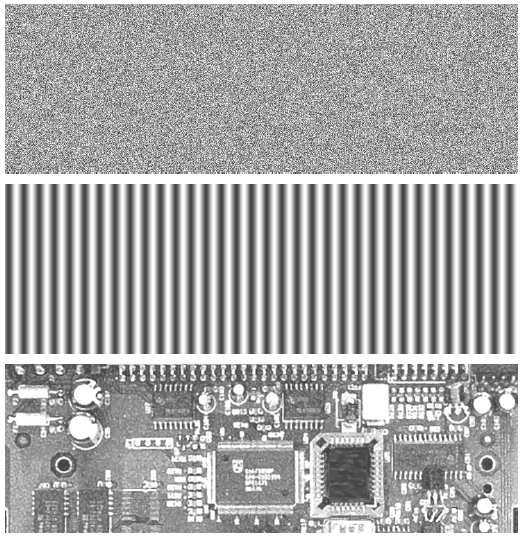
21 Texture - Definition 4/5/8

22 Texture Quantification Methods Statistical: compute local features at each point in image and derive a set of statistics from the distribution of local features st nd and higher-order statistics based on how many points are used to define local features Structural: texture is considered to be composed of texture elements. Properties of the texture elements and their spatial placement rules characterizes the texture Original texture can be reconstructed from its structural description 4/5/8
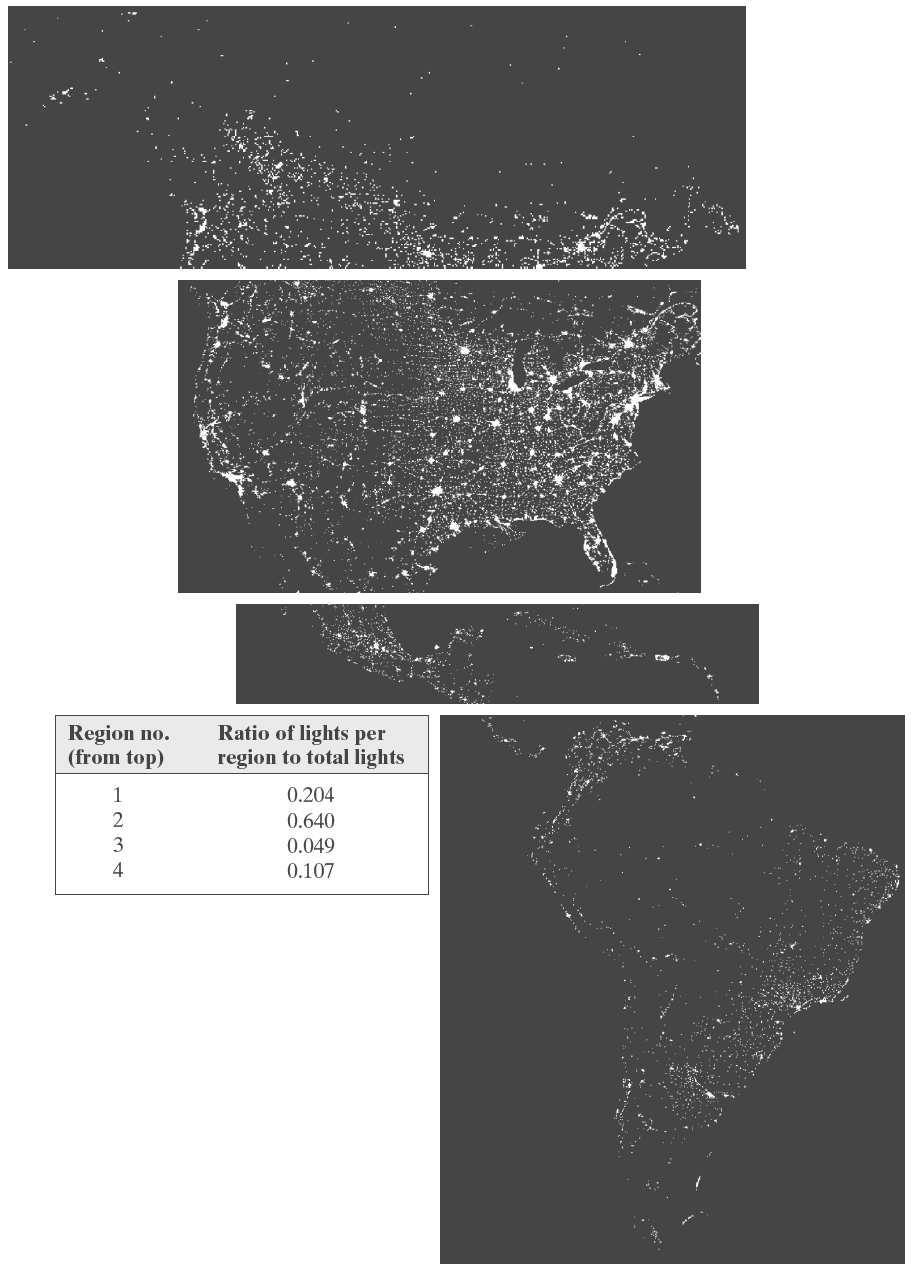
23 Statistical Texture Analysis st order statistics image f h f histogram Obtain statistics of the histogram: L Mean: ih i i Variance: Sewness: Entropy: L i L i L i i µ i µ 3 h i h i h ilog h i : average intensity : measure of intensity contrast Measure of variability of intensity 4/5/8 3

24 4/5/8 4


25 Statistical Texture Analysis st order statistics histogram statistics image Sewness.8 Entropy.88 Sewness.44 Entropy.77 Sewness -.9 Entropy.97 4/5/8 5
26 Statistical Texture Analysis nd order statistics: Co-occurrence f m n d θ j P d θ i j Pr[ f m n i f m n j] f m n i L j Joint gray-level histogram of pairs of pixels D histogram i P d θ i j L 4/5/8 6
27 4/5/8 7 Statistical Texture Analysis nd order statistics: Co-occurrence j } : { j n m f i l f d n l m N M N M n m l j i P d θ } : { 45 j n m f i l f d n l d m d n l d m N M N M n m l j i P d θ 9 j i P d θ 35 j i P d θ { } is set cardinality
28 Statistical Texture Analysis nd order statistics: Co-occurrence example image Co-occurrence matrix 4/5/8 8
29 Statistical Texture Analysis nd order statistics: Co-occurrence statistics Angular nd moment energy: measure of image homogeneity Maximum Probability: Entropy: L L i j P d θ i j max P d i j L i j L i j θ P d θ i jlogp d θ i j Contrast: measure of local variations Correlation: measure of image linearity L L L L i j L L i j i j λ d θ i j 4/5/8 9 κ d θ σ x P [ ijp i j] µ µ µ x i P d θ i j σ x i µ x i j σ y L L P d θ i j x y i j

30 4/5/8 3
31 4/5/8 3 Statistical Texture Analysis nd order statistics: Difference Statistics Angular nd moment energy: Mean: Contrast: P L d θ L d P θ log L d d P P θ θ Entropy: L P d θ j i L j i d d j i P P } { θ θ is a subset of co-occurrence matrix
32 Statistical Texture Analysis nd order statistics: Autocorrelation C ff p q M pn q l M M MN p N q f l N l f + p l f l + q Large texture elements autoccorrelation decreases slowly with increasing distance Small texture elements autoccorrelation decreases rapidly with increasing distance Periodic texture elements periodic increase & decrease in autocorrelation value 4/5/8 3
33 4/5/8 33 Statistical Texture Analysis nd order statistics: Fourier Power Spectrum v u F y x f v u F v u P π θ θ r P r P / L r r P P θ θ Power Spectrum u v u v Indicator for size of dominant texture element or texture coarseness Indicator for the directionality of the texture Note: } { v u F F C ff
34 Law s Texture Energy Measures L [] E [ ] 3 3 S3 [ ] L E S R W 5 5 [464] [ ] [ ] [ 46 4] [ ] L T 5 S Convolute different Law s mass with image Compute energy statistics 4/5/8 34
35 4/5/8 35
36 4/5/8 36

37 4/5/8 37

38 4/5/8 38

39 4/5/8 39

40 Motion object Difference image: d j i j if f i j f i ε otherwise No motion direction information! f f object motion d cum i j n a f i j f i j Cumulative difference image Tells us how often the image gray level was different from gray-level of reference image absolute positive negative 4/5/8 4

41 Motion Field A velocity vector is assigned to each pixel in the image Velocities due to relative motion between camera and the 3D scene Image change due to motion during a time interval dt Velocity field that represents 3-dimensional motion of object points across -dimensional image Motion field 4/5/8 4
42 Optical flow Motion of brightness patterns in image sequence Assumptions for computing optical flow: Observed brightness of any object point is constant over time Nearby points in the image plane move in a similar manner f f f f f x + dx y + dy t + dt f x y t + dx + dy + dt + O x y t f x y t + f dx + f dy + f dt + O dx x + dx y + dy t + dt f x y t ft f x + dt x y 4/5/8 4 t f y dy dt dx dy c u v dt dt Gray-level difference at same location over time is equivalent to product of spatial gray-level difference and velocity ft f xu + f yv f. c nown unnown
43 Optical Flow Constraints f f u t x + f y v no spatial change in brightness induce no temporal change in brightness no discernible motion motion perpendicular to local gradient induce no temporal change in brightness no discernible motion motion in direction of local gradient induce temporal change in brightness discernible motion only motion in direction of local gradient induces temporal change in brightness and discernible motion 4/5/8 43


44 Optical flow! Motion Field MF OF MF OF 4/5/8 44
45 Which descriptors? Image Feature Evaluation. Prototype Performance Classify Segment image using different features Evaluate which feature is optimal minimum classification error. Figure of Merit Establish functional distance measurements between set of image features large distance low classification error Bhattacharyya distance 4/5/8 45
Geometric Camera Parameters
 Geometric Camera Parameters What assumptions have we made so far? -All equations we have derived for far are written in the camera reference frames. -These equations are valid only when: () all distances
Geometric Camera Parameters What assumptions have we made so far? -All equations we have derived for far are written in the camera reference frames. -These equations are valid only when: () all distances
Texture. Chapter 7. 7.1 Introduction
 Chapter 7 Texture 7.1 Introduction Texture plays an important role in many machine vision tasks such as surface inspection, scene classification, and surface orientation and shape determination. For example,
Chapter 7 Texture 7.1 Introduction Texture plays an important role in many machine vision tasks such as surface inspection, scene classification, and surface orientation and shape determination. For example,
A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow
 , pp.233-237 http://dx.doi.org/10.14257/astl.2014.51.53 A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow Giwoo Kim 1, Hye-Youn Lim 1 and Dae-Seong Kang 1, 1 Department of electronices
, pp.233-237 http://dx.doi.org/10.14257/astl.2014.51.53 A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow Giwoo Kim 1, Hye-Youn Lim 1 and Dae-Seong Kang 1, 1 Department of electronices
Geometric Transformations
 Geometric Transformations Definitions Def: f is a mapping (function) of a set A into a set B if for every element a of A there exists a unique element b of B that is paired with a; this pairing is denoted
Geometric Transformations Definitions Def: f is a mapping (function) of a set A into a set B if for every element a of A there exists a unique element b of B that is paired with a; this pairing is denoted
Classification of Fingerprints. Sarat C. Dass Department of Statistics & Probability
 Classification of Fingerprints Sarat C. Dass Department of Statistics & Probability Fingerprint Classification Fingerprint classification is a coarse level partitioning of a fingerprint database into smaller
Classification of Fingerprints Sarat C. Dass Department of Statistics & Probability Fingerprint Classification Fingerprint classification is a coarse level partitioning of a fingerprint database into smaller
Bildverarbeitung und Mustererkennung Image Processing and Pattern Recognition
 Bildverarbeitung und Mustererkennung Image Processing and Pattern Recognition 1. Image Pre-Processing - Pixel Brightness Transformation - Geometric Transformation - Image Denoising 1 1. Image Pre-Processing
Bildverarbeitung und Mustererkennung Image Processing and Pattern Recognition 1. Image Pre-Processing - Pixel Brightness Transformation - Geometric Transformation - Image Denoising 1 1. Image Pre-Processing
OBJECT TRACKING USING LOG-POLAR TRANSFORMATION
 OBJECT TRACKING USING LOG-POLAR TRANSFORMATION A Thesis Submitted to the Gradual Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements
OBJECT TRACKING USING LOG-POLAR TRANSFORMATION A Thesis Submitted to the Gradual Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements
Object Recognition and Template Matching
 Object Recognition and Template Matching Template Matching A template is a small image (sub-image) The goal is to find occurrences of this template in a larger image That is, you want to find matches of
Object Recognition and Template Matching Template Matching A template is a small image (sub-image) The goal is to find occurrences of this template in a larger image That is, you want to find matches of
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
When the fluid velocity is zero, called the hydrostatic condition, the pressure variation is due only to the weight of the fluid.
 Fluid Statics When the fluid velocity is zero, called the hydrostatic condition, the pressure variation is due only to the weight of the fluid. Consider a small wedge of fluid at rest of size Δx, Δz, Δs
Fluid Statics When the fluid velocity is zero, called the hydrostatic condition, the pressure variation is due only to the weight of the fluid. Consider a small wedge of fluid at rest of size Δx, Δz, Δs
Algebra 2 Chapter 1 Vocabulary. identity - A statement that equates two equivalent expressions.
 Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
Chapter 1 Vocabulary identity - A statement that equates two equivalent expressions. verbal model- A word equation that represents a real-life problem. algebraic expression - An expression with variables.
Euler Vector: A Combinatorial Signature for Gray-Tone Images
 Euler Vector: A Combinatorial Signature for Gray-Tone Images Arijit Bishnu, Bhargab B. Bhattacharya y, Malay K. Kundu, C. A. Murthy fbishnu t, bhargab, malay, murthyg@isical.ac.in Indian Statistical Institute,
Euler Vector: A Combinatorial Signature for Gray-Tone Images Arijit Bishnu, Bhargab B. Bhattacharya y, Malay K. Kundu, C. A. Murthy fbishnu t, bhargab, malay, murthyg@isical.ac.in Indian Statistical Institute,
Afdeling Toegepaste Wiskunde/ Division of Applied Mathematics Representation and description(11.3: Regional descriptors) SLIDE 1/12
 SLIDE 1/12") Representation and description(11.3: Regional descriptors) SLIDE 1/12 11.3 Regional descriptors Common practice to combine boundary and regional descriptors 11.3.1 Some simple descriptors Area: Numberofpixelsinregion
Representation and description(11.3: Regional descriptors) SLIDE 1/12 11.3 Regional descriptors Common practice to combine boundary and regional descriptors 11.3.1 Some simple descriptors Area: Numberofpixelsinregion
EECS 556 Image Processing W 09. Interpolation. Interpolation techniques B splines
 EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
Data Mining: Exploring Data. Lecture Notes for Chapter 3. Slides by Tan, Steinbach, Kumar adapted by Michael Hahsler
 Data Mining: Exploring Data Lecture Notes for Chapter 3 Slides by Tan, Steinbach, Kumar adapted by Michael Hahsler Topics Exploratory Data Analysis Summary Statistics Visualization What is data exploration?
Data Mining: Exploring Data Lecture Notes for Chapter 3 Slides by Tan, Steinbach, Kumar adapted by Michael Hahsler Topics Exploratory Data Analysis Summary Statistics Visualization What is data exploration?
Part-Based Recognition
 Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
Galaxy Morphological Classification
 Galaxy Morphological Classification Jordan Duprey and James Kolano Abstract To solve the issue of galaxy morphological classification according to a classification scheme modelled off of the Hubble Sequence,
Galaxy Morphological Classification Jordan Duprey and James Kolano Abstract To solve the issue of galaxy morphological classification according to a classification scheme modelled off of the Hubble Sequence,
TWO-DIMENSIONAL TRANSFORMATION
 CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
CHAPTER 2 TWO-DIMENSIONAL TRANSFORMATION 2.1 Introduction As stated earlier, Computer Aided Design consists of three components, namely, Design (Geometric Modeling), Analysis (FEA, etc), and Visualization
MAVIparticle Modular Algorithms for 3D Particle Characterization
 MAVIparticle Modular Algorithms for 3D Particle Characterization version 1.0 Image Processing Department Fraunhofer ITWM Contents Contents 1 Introduction 2 2 The program 2 2.1 Framework..............................
MAVIparticle Modular Algorithms for 3D Particle Characterization version 1.0 Image Processing Department Fraunhofer ITWM Contents Contents 1 Introduction 2 2 The program 2 2.1 Framework..............................
Understanding Poles and Zeros
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING 2.14 Analysis and Design of Feedback Control Systems Understanding Poles and Zeros 1 System Poles and Zeros The transfer function
MASSACHUSETTS INSTITUTE OF TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING 2.14 Analysis and Design of Feedback Control Systems Understanding Poles and Zeros 1 System Poles and Zeros The transfer function
Vector Notation: AB represents the vector from point A to point B on a graph. The vector can be computed by B A.
 1 Linear Transformations Prepared by: Robin Michelle King A transformation of an object is a change in position or dimension (or both) of the object. The resulting object after the transformation is called
1 Linear Transformations Prepared by: Robin Michelle King A transformation of an object is a change in position or dimension (or both) of the object. The resulting object after the transformation is called
Data Mining: Exploring Data. Lecture Notes for Chapter 3. Introduction to Data Mining
 Data Mining: Exploring Data Lecture Notes for Chapter 3 Introduction to Data Mining by Tan, Steinbach, Kumar What is data exploration? A preliminary exploration of the data to better understand its characteristics.
Data Mining: Exploring Data Lecture Notes for Chapter 3 Introduction to Data Mining by Tan, Steinbach, Kumar What is data exploration? A preliminary exploration of the data to better understand its characteristics.
CS 534: Computer Vision 3D Model-based recognition
 CS 534: Computer Vision 3D Model-based recognition Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 High Level Vision Object Recognition: What it means? Two main recognition tasks:!
CS 534: Computer Vision 3D Model-based recognition Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 High Level Vision Object Recognition: What it means? Two main recognition tasks:!
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 Digital image analysis Date: Friday December 11, 2009 Exam hours: 14.30-17.30 Number of pages: 7 pages plus 1 page enclosure
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 Digital image analysis Date: Friday December 11, 2009 Exam hours: 14.30-17.30 Number of pages: 7 pages plus 1 page enclosure
An Iterative Image Registration Technique with an Application to Stereo Vision
 An Iterative Image Registration Technique with an Application to Stereo Vision Bruce D. Lucas Takeo Kanade Computer Science Department Carnegie-Mellon University Pittsburgh, Pennsylvania 15213 Abstract
An Iterative Image Registration Technique with an Application to Stereo Vision Bruce D. Lucas Takeo Kanade Computer Science Department Carnegie-Mellon University Pittsburgh, Pennsylvania 15213 Abstract
jorge s. marques image processing
 image processing images images: what are they? what is shown in this image? What is this? what is an image images describe the evolution of physical variables (intensity, color, reflectance, condutivity)
image processing images images: what are they? what is shown in this image? What is this? what is an image images describe the evolution of physical variables (intensity, color, reflectance, condutivity)
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER
 ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
Iris Sample Data Set. Basic Visualization Techniques: Charts, Graphs and Maps. Summary Statistics. Frequency and Mode
 Iris Sample Data Set Basic Visualization Techniques: Charts, Graphs and Maps CS598 Information Visualization Spring 2010 Many of the exploratory data techniques are illustrated with the Iris Plant data
Iris Sample Data Set Basic Visualization Techniques: Charts, Graphs and Maps CS598 Information Visualization Spring 2010 Many of the exploratory data techniques are illustrated with the Iris Plant data
Lecture 9: Geometric map transformations. Cartographic Transformations
 Cartographic Transformations Analytical and Computer Cartography Lecture 9: Geometric Map Transformations Attribute Data (e.g. classification) Locational properties (e.g. projection) Graphics (e.g. symbolization)
Cartographic Transformations Analytical and Computer Cartography Lecture 9: Geometric Map Transformations Attribute Data (e.g. classification) Locational properties (e.g. projection) Graphics (e.g. symbolization)
2D Geometric Transformations
 2D Geometric Transformations (Chapter 5 in FVD) 2D Geometric Transformations Question: How do we represent a geometric object in the plane? Answer: For now, assume that objects consist of points and lines.
2D Geometric Transformations (Chapter 5 in FVD) 2D Geometric Transformations Question: How do we represent a geometric object in the plane? Answer: For now, assume that objects consist of points and lines.
Practical Tour of Visual tracking. David Fleet and Allan Jepson January, 2006
 Practical Tour of Visual tracking David Fleet and Allan Jepson January, 2006 Designing a Visual Tracker: What is the state? pose and motion (position, velocity, acceleration, ) shape (size, deformation,
Practical Tour of Visual tracking David Fleet and Allan Jepson January, 2006 Designing a Visual Tracker: What is the state? pose and motion (position, velocity, acceleration, ) shape (size, deformation,
Binary Stars. Kepler s Laws of Orbital Motion
 Binary Stars Kepler s Laws of Orbital Motion Kepler s Three Laws of orbital motion result from the solution to the equation of motion for bodies moving under the influence of a central 1/r 2 force gravity.
Binary Stars Kepler s Laws of Orbital Motion Kepler s Three Laws of orbital motion result from the solution to the equation of motion for bodies moving under the influence of a central 1/r 2 force gravity.
Modelling, Extraction and Description of Intrinsic Cues of High Resolution Satellite Images: Independent Component Analysis based approaches
 Modelling, Extraction and Description of Intrinsic Cues of High Resolution Satellite Images: Independent Component Analysis based approaches PhD Thesis by Payam Birjandi Director: Prof. Mihai Datcu Problematic
Modelling, Extraction and Description of Intrinsic Cues of High Resolution Satellite Images: Independent Component Analysis based approaches PhD Thesis by Payam Birjandi Director: Prof. Mihai Datcu Problematic
Structural Axial, Shear and Bending Moments
 Structural Axial, Shear and Bending Moments Positive Internal Forces Acting Recall from mechanics of materials that the internal forces P (generic axial), V (shear) and M (moment) represent resultants
Structural Axial, Shear and Bending Moments Positive Internal Forces Acting Recall from mechanics of materials that the internal forces P (generic axial), V (shear) and M (moment) represent resultants
Introduction to Robotics Analysis, Systems, Applications
 Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
Introduction to Robotics Analysis, Systems, Applications Saeed B. Niku Mechanical Engineering Department California Polytechnic State University San Luis Obispo Technische Urw/carsMt Darmstadt FACHBEREfCH
Lecture 2: Homogeneous Coordinates, Lines and Conics
 Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
Lecture 2: Homogeneous Coordinates, Lines and Conics 1 Homogeneous Coordinates In Lecture 1 we derived the camera equations λx = P X, (1) where x = (x 1, x 2, 1), X = (X 1, X 2, X 3, 1) and P is a 3 4
APPLYING COMPUTER VISION TECHNIQUES TO TOPOGRAPHIC OBJECTS
 APPLYING COMPUTER VISION TECHNIQUES TO TOPOGRAPHIC OBJECTS Laura Keyes, Adam Winstanley Department of Computer Science National University of Ireland Maynooth Co. Kildare, Ireland lkeyes@cs.may.ie, Adam.Winstanley@may.ie
APPLYING COMPUTER VISION TECHNIQUES TO TOPOGRAPHIC OBJECTS Laura Keyes, Adam Winstanley Department of Computer Science National University of Ireland Maynooth Co. Kildare, Ireland lkeyes@cs.may.ie, Adam.Winstanley@may.ie
Data, Measurements, Features
 Data, Measurements, Features Middle East Technical University Dep. of Computer Engineering 2009 compiled by V. Atalay What do you think of when someone says Data? We might abstract the idea that data are
Data, Measurements, Features Middle East Technical University Dep. of Computer Engineering 2009 compiled by V. Atalay What do you think of when someone says Data? We might abstract the idea that data are
Two-Frame Motion Estimation Based on Polynomial Expansion
 Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden gf@isy.liu.se http://www.isy.liu.se/cvl/ Abstract.
Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden gf@isy.liu.se http://www.isy.liu.se/cvl/ Abstract.
Metrics on SO(3) and Inverse Kinematics
 and Inverse Kinematics") Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Mathematical Foundations of Computer Graphics and Vision Metrics on SO(3) and Inverse Kinematics Luca Ballan Institute of Visual Computing Optimization on Manifolds Descent approach d is a ascent direction
Environmental Remote Sensing GEOG 2021
 Environmental Remote Sensing GEOG 2021 Lecture 4 Image classification 2 Purpose categorising data data abstraction / simplification data interpretation mapping for land cover mapping use land cover class
Environmental Remote Sensing GEOG 2021 Lecture 4 Image classification 2 Purpose categorising data data abstraction / simplification data interpretation mapping for land cover mapping use land cover class
www.mathsbox.org.uk ab = c a If the coefficients a,b and c are real then either α and β are real or α and β are complex conjugates
 Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
Computer Graphics. Geometric Modeling. Page 1. Copyright Gotsman, Elber, Barequet, Karni, Sheffer Computer Science - Technion. An Example.
 An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
An Example 2 3 4 Outline Objective: Develop methods and algorithms to mathematically model shape of real world objects Categories: Wire-Frame Representation Object is represented as as a set of points
Affine Transformations
 A P P E N D I X C Affine Transformations CONTENTS C The need for geometric transformations 335 C2 Affine transformations 336 C3 Matri representation of the linear transformations 338 C4 Homogeneous coordinates
A P P E N D I X C Affine Transformations CONTENTS C The need for geometric transformations 335 C2 Affine transformations 336 C3 Matri representation of the linear transformations 338 C4 Homogeneous coordinates
Classifying Manipulation Primitives from Visual Data
 Classifying Manipulation Primitives from Visual Data Sandy Huang and Dylan Hadfield-Menell Abstract One approach to learning from demonstrations in robotics is to make use of a classifier to predict if
Classifying Manipulation Primitives from Visual Data Sandy Huang and Dylan Hadfield-Menell Abstract One approach to learning from demonstrations in robotics is to make use of a classifier to predict if
Lecture 2: Geometric Image Transformations
 Lecture 2: Geometric Image Transformations Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu September 8, 2005 Abstract Geometric transformations
Lecture 2: Geometric Image Transformations Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu September 8, 2005 Abstract Geometric transformations
Lecture L3 - Vectors, Matrices and Coordinate Transformations
 S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between
7. DYNAMIC LIGHT SCATTERING 7.1 First order temporal autocorrelation function.
 7. DYNAMIC LIGHT SCATTERING 7. First order temporal autocorrelation function. Dynamic light scattering (DLS) studies the properties of inhomogeneous and dynamic media. A generic situation is illustrated
7. DYNAMIC LIGHT SCATTERING 7. First order temporal autocorrelation function. Dynamic light scattering (DLS) studies the properties of inhomogeneous and dynamic media. A generic situation is illustrated
Signature verification using Kolmogorov-Smirnov. statistic
 Signature verification using Kolmogorov-Smirnov statistic Harish Srinivasan, Sargur N.Srihari and Matthew J Beal University at Buffalo, the State University of New York, Buffalo USA {srihari,hs32}@cedar.buffalo.edu,mbeal@cse.buffalo.edu
Signature verification using Kolmogorov-Smirnov statistic Harish Srinivasan, Sargur N.Srihari and Matthew J Beal University at Buffalo, the State University of New York, Buffalo USA {srihari,hs32}@cedar.buffalo.edu,mbeal@cse.buffalo.edu
Practice Final Math 122 Spring 12 Instructor: Jeff Lang
 Practice Final Math Spring Instructor: Jeff Lang. Find the limit of the sequence a n = ln (n 5) ln (3n + 8). A) ln ( ) 3 B) ln C) ln ( ) 3 D) does not exist. Find the limit of the sequence a n = (ln n)6
Practice Final Math Spring Instructor: Jeff Lang. Find the limit of the sequence a n = ln (n 5) ln (3n + 8). A) ln ( ) 3 B) ln C) ln ( ) 3 D) does not exist. Find the limit of the sequence a n = (ln n)6
This makes sense. t 2 1 + 1/t 2 dt = 1. t t 2 + 1dt = 2 du = 1 3 u3/2 u=5
 1. (Line integrals Using parametrization. Two types and the flux integral) Formulas: ds = x (t) dt, d x = x (t)dt and d x = T ds since T = x (t)/ x (t). Another one is Nds = T ds ẑ = (dx, dy) ẑ = (dy,
1. (Line integrals Using parametrization. Two types and the flux integral) Formulas: ds = x (t) dt, d x = x (t)dt and d x = T ds since T = x (t)/ x (t). Another one is Nds = T ds ẑ = (dx, dy) ẑ = (dy,
Data Exploration Data Visualization
 Data Exploration Data Visualization What is data exploration? A preliminary exploration of the data to better understand its characteristics. Key motivations of data exploration include Helping to select
Data Exploration Data Visualization What is data exploration? A preliminary exploration of the data to better understand its characteristics. Key motivations of data exploration include Helping to select
Lecture 7. Matthew T. Mason. Mechanics of Manipulation. Lecture 7. Representing Rotation. Kinematic representation: goals, overview
 Matthew T. Mason Mechanics of Manipulation Today s outline Readings, etc. We are starting chapter 3 of the text Lots of stuff online on representing rotations Murray, Li, and Sastry for matrix exponential
Matthew T. Mason Mechanics of Manipulation Today s outline Readings, etc. We are starting chapter 3 of the text Lots of stuff online on representing rotations Murray, Li, and Sastry for matrix exponential
42 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE. Figure 1.18: Parabola y = 2x 2. 1.6.1 Brief review of Conic Sections
 2 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.18: Parabola y = 2 1.6 Quadric Surfaces 1.6.1 Brief review of Conic Sections You may need to review conic sections for this to make more sense. You
2 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.18: Parabola y = 2 1.6 Quadric Surfaces 1.6.1 Brief review of Conic Sections You may need to review conic sections for this to make more sense. You
Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 269 Class Project Report
 Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 69 Class Project Report Junhua Mao and Lunbo Xu University of California, Los Angeles mjhustc@ucla.edu and lunbo
Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 69 Class Project Report Junhua Mao and Lunbo Xu University of California, Los Angeles mjhustc@ucla.edu and lunbo
Efficient Attendance Management: A Face Recognition Approach
 Efficient Attendance Management: A Face Recognition Approach Badal J. Deshmukh, Sudhir M. Kharad Abstract Taking student attendance in a classroom has always been a tedious task faultfinders. It is completely
Efficient Attendance Management: A Face Recognition Approach Badal J. Deshmukh, Sudhir M. Kharad Abstract Taking student attendance in a classroom has always been a tedious task faultfinders. It is completely
SOLUTIONS. f x = 6x 2 6xy 24x, f y = 3x 2 6y. To find the critical points, we solve
 SOLUTIONS Problem. Find the critical points of the function f(x, y = 2x 3 3x 2 y 2x 2 3y 2 and determine their type i.e. local min/local max/saddle point. Are there any global min/max? Partial derivatives
SOLUTIONS Problem. Find the critical points of the function f(x, y = 2x 3 3x 2 y 2x 2 3y 2 and determine their type i.e. local min/local max/saddle point. Are there any global min/max? Partial derivatives
The purposes of this experiment are to test Faraday's Law qualitatively and to test Lenz's Law.
 260 17-1 I. THEORY EXPERIMENT 17 QUALITATIVE STUDY OF INDUCED EMF Along the extended central axis of a bar magnet, the magnetic field vector B r, on the side nearer the North pole, points away from this
260 17-1 I. THEORY EXPERIMENT 17 QUALITATIVE STUDY OF INDUCED EMF Along the extended central axis of a bar magnet, the magnetic field vector B r, on the side nearer the North pole, points away from this
Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain
 92.222 - Linear Algebra II - Spring 2004 by D. Klain") Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain 1. Orthogonal matrices and orthonormal sets An n n real-valued matrix A is said to be an orthogonal
Lectures notes on orthogonal matrices (with exercises) 92.222 - Linear Algebra II - Spring 2004 by D. Klain 1. Orthogonal matrices and orthonormal sets An n n real-valued matrix A is said to be an orthogonal
Object tracking & Motion detection in video sequences
 Introduction Object tracking & Motion detection in video sequences Recomended link: http://cmp.felk.cvut.cz/~hlavac/teachpresen/17compvision3d/41imagemotion.pdf 1 2 DYNAMIC SCENE ANALYSIS The input to
Introduction Object tracking & Motion detection in video sequences Recomended link: http://cmp.felk.cvut.cz/~hlavac/teachpresen/17compvision3d/41imagemotion.pdf 1 2 DYNAMIC SCENE ANALYSIS The input to
Lecture L22-2D Rigid Body Dynamics: Work and Energy
 J. Peraire, S. Widnall 6.07 Dynamics Fall 008 Version.0 Lecture L - D Rigid Body Dynamics: Work and Energy In this lecture, we will revisit the principle of work and energy introduced in lecture L-3 for
J. Peraire, S. Widnall 6.07 Dynamics Fall 008 Version.0 Lecture L - D Rigid Body Dynamics: Work and Energy In this lecture, we will revisit the principle of work and energy introduced in lecture L-3 for
APPLIED MATHEMATICS ADVANCED LEVEL
 APPLIED MATHEMATICS ADVANCED LEVEL INTRODUCTION This syllabus serves to examine candidates knowledge and skills in introductory mathematical and statistical methods, and their applications. For applications
APPLIED MATHEMATICS ADVANCED LEVEL INTRODUCTION This syllabus serves to examine candidates knowledge and skills in introductory mathematical and statistical methods, and their applications. For applications
 Tracking Moving Objects In Video Sequences Yiwei Wang, Robert E. Van Dyck, and John F. Doherty Department of Electrical Engineering The Pennsylvania State University University Park, PA16802 Abstract{Object
Tracking Moving Objects In Video Sequences Yiwei Wang, Robert E. Van Dyck, and John F. Doherty Department of Electrical Engineering The Pennsylvania State University University Park, PA16802 Abstract{Object
Assessment. Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall
 Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
Major Work of the Grade
 Counting and Cardinality Know number names and the count sequence. Count to tell the number of objects. Compare numbers. Kindergarten Describe and compare measurable attributes. Classify objects and count
Counting and Cardinality Know number names and the count sequence. Count to tell the number of objects. Compare numbers. Kindergarten Describe and compare measurable attributes. Classify objects and count
Data Mining: Exploring Data. Lecture Notes for Chapter 3. Introduction to Data Mining
 Data Mining: Exploring Data Lecture Notes for Chapter 3 Introduction to Data Mining by Tan, Steinbach, Kumar Tan,Steinbach, Kumar Introduction to Data Mining 8/05/2005 1 What is data exploration? A preliminary
Data Mining: Exploring Data Lecture Notes for Chapter 3 Introduction to Data Mining by Tan, Steinbach, Kumar Tan,Steinbach, Kumar Introduction to Data Mining 8/05/2005 1 What is data exploration? A preliminary
Analysis of Stresses and Strains
 Chapter 7 Analysis of Stresses and Strains 7.1 Introduction axial load = P / A torsional load in circular shaft = T / I p bending moment and shear force in beam = M y / I = V Q / I b in this chapter, we
Chapter 7 Analysis of Stresses and Strains 7.1 Introduction axial load = P / A torsional load in circular shaft = T / I p bending moment and shear force in beam = M y / I = V Q / I b in this chapter, we
Feature Tracking and Optical Flow
 02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
Build Panoramas on Android Phones
 Build Panoramas on Android Phones Tao Chu, Bowen Meng, Zixuan Wang Stanford University, Stanford CA Abstract The purpose of this work is to implement panorama stitching from a sequence of photos taken
Build Panoramas on Android Phones Tao Chu, Bowen Meng, Zixuan Wang Stanford University, Stanford CA Abstract The purpose of this work is to implement panorama stitching from a sequence of photos taken
Module II: Multimedia Data Mining
 ALMA MATER STUDIORUM - UNIVERSITÀ DI BOLOGNA Module II: Multimedia Data Mining Laurea Magistrale in Ingegneria Informatica University of Bologna Multimedia Data Retrieval Home page: http://www-db.disi.unibo.it/courses/dm/
ALMA MATER STUDIORUM - UNIVERSITÀ DI BOLOGNA Module II: Multimedia Data Mining Laurea Magistrale in Ingegneria Informatica University of Bologna Multimedia Data Retrieval Home page: http://www-db.disi.unibo.it/courses/dm/
2.3 Spatial Resolution, Pixel Size, and Scale
 Section 2.3 Spatial Resolution, Pixel Size, and Scale Page 39 2.3 Spatial Resolution, Pixel Size, and Scale For some remote sensing instruments, the distance between the target being imaged and the platform,
Section 2.3 Spatial Resolution, Pixel Size, and Scale Page 39 2.3 Spatial Resolution, Pixel Size, and Scale For some remote sensing instruments, the distance between the target being imaged and the platform,
Figure 2.1: Center of mass of four points.
 Chapter 2 Bézier curves are named after their inventor, Dr. Pierre Bézier. Bézier was an engineer with the Renault car company and set out in the early 196 s to develop a curve formulation which would
Chapter 2 Bézier curves are named after their inventor, Dr. Pierre Bézier. Bézier was an engineer with the Renault car company and set out in the early 196 s to develop a curve formulation which would
AB2.5: Surfaces and Surface Integrals. Divergence Theorem of Gauss
 AB2.5: urfaces and urface Integrals. Divergence heorem of Gauss epresentations of surfaces or epresentation of a surface as projections on the xy- and xz-planes, etc. are For example, z = f(x, y), x =
AB2.5: urfaces and urface Integrals. Divergence heorem of Gauss epresentations of surfaces or epresentation of a surface as projections on the xy- and xz-planes, etc. are For example, z = f(x, y), x =
2D Geometrical Transformations. Foley & Van Dam, Chapter 5
 2D Geometrical Transformations Fole & Van Dam, Chapter 5 2D Geometrical Transformations Translation Scaling Rotation Shear Matri notation Compositions Homogeneous coordinates 2D Geometrical Transformations
2D Geometrical Transformations Fole & Van Dam, Chapter 5 2D Geometrical Transformations Translation Scaling Rotation Shear Matri notation Compositions Homogeneous coordinates 2D Geometrical Transformations
9 MATRICES AND TRANSFORMATIONS
 9 MATRICES AND TRANSFORMATIONS Chapter 9 Matrices and Transformations Objectives After studying this chapter you should be able to handle matrix (and vector) algebra with confidence, and understand the
9 MATRICES AND TRANSFORMATIONS Chapter 9 Matrices and Transformations Objectives After studying this chapter you should be able to handle matrix (and vector) algebra with confidence, and understand the
THEORETICAL MECHANICS
 PROF. DR. ING. VASILE SZOLGA THEORETICAL MECHANICS LECTURE NOTES AND SAMPLE PROBLEMS PART ONE STATICS OF THE PARTICLE, OF THE RIGID BODY AND OF THE SYSTEMS OF BODIES KINEMATICS OF THE PARTICLE 2010 0 Contents
PROF. DR. ING. VASILE SZOLGA THEORETICAL MECHANICS LECTURE NOTES AND SAMPLE PROBLEMS PART ONE STATICS OF THE PARTICLE, OF THE RIGID BODY AND OF THE SYSTEMS OF BODIES KINEMATICS OF THE PARTICLE 2010 0 Contents
Face Recognition in Low-resolution Images by Using Local Zernike Moments
 Proceedings of the International Conference on Machine Vision and Machine Learning Prague, Czech Republic, August14-15, 014 Paper No. 15 Face Recognition in Low-resolution Images by Using Local Zernie
Proceedings of the International Conference on Machine Vision and Machine Learning Prague, Czech Republic, August14-15, 014 Paper No. 15 Face Recognition in Low-resolution Images by Using Local Zernie
Machine vision systems - 2
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Computer Graphics Labs
 Computer Graphics Labs Abel J. P. Gomes LAB. 2 Department of Computer Science and Engineering University of Beira Interior Portugal 2011 Copyright 2009-2011 All rights reserved. LAB. 2 1. Learning goals
Computer Graphics Labs Abel J. P. Gomes LAB. 2 Department of Computer Science and Engineering University of Beira Interior Portugal 2011 Copyright 2009-2011 All rights reserved. LAB. 2 1. Learning goals
DEVELOPMENT OF AN IMAGING SYSTEM FOR THE CHARACTERIZATION OF THE THORACIC AORTA.
 DEVELOPMENT OF AN IMAGING SYSTEM FOR THE CHARACTERIZATION OF THE THORACIC AORTA. Juan Antonio Martínez Mera Centro Singular de Investigación en Tecnoloxías da Información Universidade de Santiago de Compostela
DEVELOPMENT OF AN IMAGING SYSTEM FOR THE CHARACTERIZATION OF THE THORACIC AORTA. Juan Antonio Martínez Mera Centro Singular de Investigación en Tecnoloxías da Información Universidade de Santiago de Compostela
Lecture L5 - Other Coordinate Systems
 S. Widnall, J. Peraire 16.07 Dynamics Fall 008 Version.0 Lecture L5 - Other Coordinate Systems In this lecture, we will look at some other common systems of coordinates. We will present polar coordinates
S. Widnall, J. Peraire 16.07 Dynamics Fall 008 Version.0 Lecture L5 - Other Coordinate Systems In this lecture, we will look at some other common systems of coordinates. We will present polar coordinates
Jiří Matas. Hough Transform
 Hough Transform Jiří Matas Center for Machine Perception Department of Cybernetics, Faculty of Electrical Engineering Czech Technical University, Prague Many slides thanks to Kristen Grauman and Bastian
Hough Transform Jiří Matas Center for Machine Perception Department of Cybernetics, Faculty of Electrical Engineering Czech Technical University, Prague Many slides thanks to Kristen Grauman and Bastian
11. Rotation Translational Motion: Rotational Motion:
 11. Rotation Translational Motion: Motion of the center of mass of an object from one position to another. All the motion discussed so far belongs to this category, except uniform circular motion. Rotational
11. Rotation Translational Motion: Motion of the center of mass of an object from one position to another. All the motion discussed so far belongs to this category, except uniform circular motion. Rotational
Algebra 1 2008. Academic Content Standards Grade Eight and Grade Nine Ohio. Grade Eight. Number, Number Sense and Operations Standard
 Academic Content Standards Grade Eight and Grade Nine Ohio Algebra 1 2008 Grade Eight STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express
Academic Content Standards Grade Eight and Grade Nine Ohio Algebra 1 2008 Grade Eight STANDARDS Number, Number Sense and Operations Standard Number and Number Systems 1. Use scientific notation to express
E190Q Lecture 5 Autonomous Robot Navigation
 E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 5 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
Optical Flow. Shenlong Wang CSC2541 Course Presentation Feb 2, 2016
 Optical Flow Shenlong Wang CSC2541 Course Presentation Feb 2, 2016 Outline Introduction Variation Models Feature Matching Methods End-to-end Learning based Methods Discussion Optical Flow Goal: Pixel motion
Optical Flow Shenlong Wang CSC2541 Course Presentation Feb 2, 2016 Outline Introduction Variation Models Feature Matching Methods End-to-end Learning based Methods Discussion Optical Flow Goal: Pixel motion
Physics 1A Lecture 10C
 Physics 1A Lecture 10C "If you neglect to recharge a battery, it dies. And if you run full speed ahead without stopping for water, you lose momentum to finish the race. --Oprah Winfrey Static Equilibrium
Physics 1A Lecture 10C "If you neglect to recharge a battery, it dies. And if you run full speed ahead without stopping for water, you lose momentum to finish the race. --Oprah Winfrey Static Equilibrium
EXPLORING SPATIAL PATTERNS IN YOUR DATA
 EXPLORING SPATIAL PATTERNS IN YOUR DATA OBJECTIVES Learn how to examine your data using the Geostatistical Analysis tools in ArcMap. Learn how to use descriptive statistics in ArcMap and Geoda to analyze
EXPLORING SPATIAL PATTERNS IN YOUR DATA OBJECTIVES Learn how to examine your data using the Geostatistical Analysis tools in ArcMap. Learn how to use descriptive statistics in ArcMap and Geoda to analyze
Differentiation of vectors
 Chapter 4 Differentiation of vectors 4.1 Vector-valued functions In the previous chapters we have considered real functions of several (usually two) variables f : D R, where D is a subset of R n, where
Chapter 4 Differentiation of vectors 4.1 Vector-valued functions In the previous chapters we have considered real functions of several (usually two) variables f : D R, where D is a subset of R n, where
HAND GESTURE BASEDOPERATINGSYSTEM CONTROL
 HAND GESTURE BASEDOPERATINGSYSTEM CONTROL Garkal Bramhraj 1, palve Atul 2, Ghule Supriya 3, Misal sonali 4 1 Garkal Bramhraj mahadeo, 2 Palve Atule Vasant, 3 Ghule Supriya Shivram, 4 Misal Sonali Babasaheb,
HAND GESTURE BASEDOPERATINGSYSTEM CONTROL Garkal Bramhraj 1, palve Atul 2, Ghule Supriya 3, Misal sonali 4 1 Garkal Bramhraj mahadeo, 2 Palve Atule Vasant, 3 Ghule Supriya Shivram, 4 Misal Sonali Babasaheb,
L 2 : x = s + 1, y = s, z = 4s + 4. 3. Suppose that C has coordinates (x, y, z). Then from the vector equality AC = BD, one has
. Then from the vector equality AC = BD, one has") The line L through the points A and B is parallel to the vector AB = 3, 2, and has parametric equations x = 3t + 2, y = 2t +, z = t Therefore, the intersection point of the line with the plane should satisfy:
The line L through the points A and B is parallel to the vector AB = 3, 2, and has parametric equations x = 3t + 2, y = 2t +, z = t Therefore, the intersection point of the line with the plane should satisfy:
Review Jeopardy. Blue vs. Orange. Review Jeopardy
 Review Jeopardy Blue vs. Orange Review Jeopardy Jeopardy Round Lectures 0-3 Jeopardy Round $200 How could I measure how far apart (i.e. how different) two observations, y 1 and y 2, are from each other?
Review Jeopardy Blue vs. Orange Review Jeopardy Jeopardy Round Lectures 0-3 Jeopardy Round $200 How could I measure how far apart (i.e. how different) two observations, y 1 and y 2, are from each other?
The Fourth International DERIVE-TI92/89 Conference Liverpool, U.K., 12-15 July 2000. Derive 5: The Easiest... Just Got Better!
 The Fourth International DERIVE-TI9/89 Conference Liverpool, U.K., -5 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de technologie supérieure 00, rue Notre-Dame Ouest Montréal
The Fourth International DERIVE-TI9/89 Conference Liverpool, U.K., -5 July 000 Derive 5: The Easiest... Just Got Better! Michel Beaudin École de technologie supérieure 00, rue Notre-Dame Ouest Montréal
Correlation in Random Variables
 Correlation in Random Variables Lecture 11 Spring 2002 Correlation in Random Variables Suppose that an experiment produces two random variables, X and Y. What can we say about the relationship between
Correlation in Random Variables Lecture 11 Spring 2002 Correlation in Random Variables Suppose that an experiment produces two random variables, X and Y. What can we say about the relationship between
ECE 533 Project Report Ashish Dhawan Aditi R. Ganesan
 Handwritten Signature Verification ECE 533 Project Report by Ashish Dhawan Aditi R. Ganesan Contents 1. Abstract 3. 2. Introduction 4. 3. Approach 6. 4. Pre-processing 8. 5. Feature Extraction 9. 6. Verification
Handwritten Signature Verification ECE 533 Project Report by Ashish Dhawan Aditi R. Ganesan Contents 1. Abstract 3. 2. Introduction 4. 3. Approach 6. 4. Pre-processing 8. 5. Feature Extraction 9. 6. Verification
Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Sample Exam Questions 2007
 Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Questions 2007 INSTRUCTIONS: Answer all questions. Spend approximately 1 minute per mark. Question 1 30 Marks Total
Monash University Clayton s School of Information Technology CSE3313 Computer Graphics Questions 2007 INSTRUCTIONS: Answer all questions. Spend approximately 1 minute per mark. Question 1 30 Marks Total
MODELLING A SATELLITE CONTROL SYSTEM SIMULATOR
 National nstitute for Space Research NPE Space Mechanics and Control Division DMC São José dos Campos, SP, Brasil MODELLNG A SATELLTE CONTROL SYSTEM SMULATOR Luiz C Gadelha Souza gadelha@dem.inpe.br rd
National nstitute for Space Research NPE Space Mechanics and Control Division DMC São José dos Campos, SP, Brasil MODELLNG A SATELLTE CONTROL SYSTEM SMULATOR Luiz C Gadelha Souza gadelha@dem.inpe.br rd
How To Understand The Dynamics Of A Multibody System
 4 Dynamic Analysis. Mass Matrices and External Forces The formulation of the inertia and external forces appearing at any of the elements of a multibody system, in terms of the dependent coordinates that
4 Dynamic Analysis. Mass Matrices and External Forces The formulation of the inertia and external forces appearing at any of the elements of a multibody system, in terms of the dependent coordinates that