An Integrated Feature Selection Strategy For Monocular SLAM
|
|
|
- Rudolph Jefferson
- 7 years ago
- Views:
Transcription



1 An Integrated Feature Selection Strategy For Monocular SLAM Presenter: Kuan-Ting Yu Advisor: Li-Chen Fu NTU Intelligent Robot Lab Industrial Technology Research Institute September,
2 Outline Introduction Feature Extraction Bottom-up Feature Selection Top-down Feature Selection Experimental Results Conclusions 2
3 Outline Introduction Feature Extraction Bottom-up Feature Selection Top-down Feature Selection Experimental Results Conclusions 3



4 Introduction To perform desired tasks in indoor environments, how to estimate robot s position and map about surroundings is a critical problem. 4

5 SLAM Simultaneous localization and mapping (SLAM) Incrementally build a map of this environment while simultaneously determining its location Given: 1. Robot s odometry 2. Observations of nearby features Estimate: 1. Location of the robot 2. Map of features 5
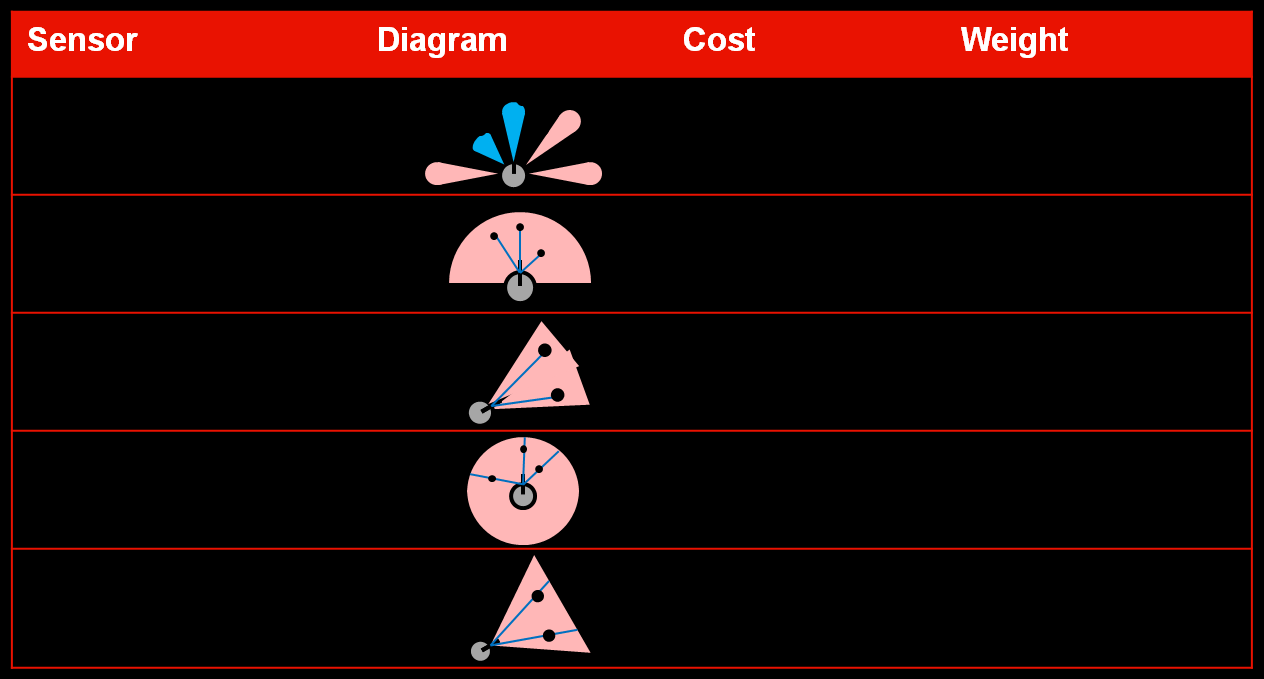


6 6 Sensors
7 vslam Generic SLAM Vision-based SLAM Landmark extraction Interest points (features) Data association Interest points matching State predict State update & Probabilistic framework landmark update 7


8 vslam Challenge Huge amount of features Degrade performance Cause mismatch 8

9 Solution Idea Feature selection strategy Remove useless features Keep good features 9

10 System Overview 1. Landmark extraction 2. Data association 3. State predict 4. State update & landmark update 10
11 Outline Introduction Feature Extraction Bottom-up Feature Selection Top-down Feature Selection Experimental Results Conclusions 11
: Easy to find their")

12 What is Feature? Features (interest points): Easy to find their correspondences? Desired features: Distinctive: outstanding, easily matched Invariant: invariant to scale, viewpoint change 12
![Feature Detectors Scale Invariant Feature Transform (SIFT) [Lowe, 2004] is one of the best feature detectors, but slow Speeded Up Robust](/docs-images/60/44654567/images/13-3.png "Features (SURF) [Bay, et al., 2006] SURF has good performance as SIFT and faster SIFT SURF Images 13 Extraction time 863.998 ms 267.")
13 Feature Detectors Scale Invariant Feature Transform (SIFT) [Lowe, 2004] is one of the best feature detectors, but slow Speeded Up Robust Features (SURF) [Bay, et al., 2006] SURF has good performance as SIFT and faster SIFT SURF Images 13 Extraction time ms ms
14 Feature Extraction Challenge Hundreds of SURF points are extracted Increase computational time Need higher data storage But, fewer features are desired in practice Remove useless features Keep repeatable features A feature selection strategy is necessary 14

15 Feature Selection Human never process the whole image at once Focus on some regions of interest (ROIs) A natural solution visual attention system Bottom-up approach Top-down approach 15 Image-driven Knowledge-driven
16 Outline Introduction Feature Extraction Bottom-up Feature Selection Top-down Feature Selection Experimental Results Conclusions 16

17 Feature Selection Bottom-up Approach Visual attention system Saliency model [Itti et al., 1998] 1 Replace the original RGB color space with CIE L*a*b Mimic color opponencies of human vision [1] L. Itti, C. Koch, and E. Niebur, A Model of Saliency-Based Visual Attention for Rapid Scene Analysis, PAMI,



18 Feature Selection Bottom-up Approach Results of modified saliency model Sal N( 1 ( C I O)) 3 18
19 Outline Introduction Feature Extraction Bottom-up Feature Selection Top-down Feature Selection Experimental Results Conclusions 19

20 Feature Selection - Top down approach Sometimes, bottom-up ROIs are not enough For example: Integrates top-down approach to achieve flexible feature selection 20

21 Feature Selection - Top down approach Human robot interaction (HRI) can be applied to object learning Communication with the robot Pointing with intelligent devices 21
 Compute Homography xi ' xi s i y ' = i H yi 1 1 x y 1, 1 x y 2, 2 x1', y1' x ', y H 2")
22 Feature Selection - Top down approach Robot redetects known objects process Based on an object recognition algorithm RANSAC (Reject inconsistent matches) Compute Homography xi ' xi s i y ' = i H yi 1 1 x y 1, 1 x y 2, 2 x1', y1' x ', y H 2 2 ' 22
23 Feature Selection - Top down approach Solving the homography matrix, then we project the four end-points to determine top-down ROI 23





24 Feature Selection Merge two ROIs to obtain versatile features 24
25 Outline Introduction Feature Extraction Bottom-up Feature Selection Top-down Feature Selection Experimental Results Conclusions 25


26 Experiment Setting Pioneer 3DX Logitech webcam V-UBH44 Room size: 6m*8m 26


27 27 SLAM Map

28 Localization Error Comparison Average Variance TDBU: the proposed integrated bottom-up and top-down selection TD: top-down BU: bottom-up NO: without selection 28
29 Time Comparison TDBU: the proposed integrated bottom-up and top-down selection TD: top-down BU: bottom-up NO: without selection 29

30 30 Matching Comparison 1/2

31 31 Matching Comparison 2/2
32 Conclusions We propose an integrated feature selection strategy based on visual attention system for bearing-only SLAM with EKF Reduce computation time to 62% Reduce localization error to 89% Combining bottom-up and top-down approach to construct ROIs allow us to Select salient and useful features Improve data association 32
Mobile Robot FastSLAM with Xbox Kinect
 Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
Mobile Robot FastSLAM with Xbox Kinect Design Team Taylor Apgar, Sean Suri, Xiangdong Xi Design Advisor Prof. Greg Kowalski Abstract Mapping is an interesting and difficult problem in robotics. In order
GPS-aided Recognition-based User Tracking System with Augmented Reality in Extreme Large-scale Areas
 GPS-aided Recognition-based User Tracking System with Augmented Reality in Extreme Large-scale Areas Wei Guan Computer Graphics and Immersive Technologies Computer Science, USC wguan@usc.edu Suya You Computer
GPS-aided Recognition-based User Tracking System with Augmented Reality in Extreme Large-scale Areas Wei Guan Computer Graphics and Immersive Technologies Computer Science, USC wguan@usc.edu Suya You Computer
A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow
 , pp.233-237 http://dx.doi.org/10.14257/astl.2014.51.53 A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow Giwoo Kim 1, Hye-Youn Lim 1 and Dae-Seong Kang 1, 1 Department of electronices
, pp.233-237 http://dx.doi.org/10.14257/astl.2014.51.53 A Study on SURF Algorithm and Real-Time Tracking Objects Using Optical Flow Giwoo Kim 1, Hye-Youn Lim 1 and Dae-Seong Kang 1, 1 Department of electronices
Build Panoramas on Android Phones
 Build Panoramas on Android Phones Tao Chu, Bowen Meng, Zixuan Wang Stanford University, Stanford CA Abstract The purpose of this work is to implement panorama stitching from a sequence of photos taken
Build Panoramas on Android Phones Tao Chu, Bowen Meng, Zixuan Wang Stanford University, Stanford CA Abstract The purpose of this work is to implement panorama stitching from a sequence of photos taken
Incremental PCA: An Alternative Approach for Novelty Detection
 Incremental PCA: An Alternative Approach for Detection Hugo Vieira Neto and Ulrich Nehmzow Department of Computer Science University of Essex Wivenhoe Park Colchester CO4 3SQ {hvieir, udfn}@essex.ac.uk
Incremental PCA: An Alternative Approach for Detection Hugo Vieira Neto and Ulrich Nehmzow Department of Computer Science University of Essex Wivenhoe Park Colchester CO4 3SQ {hvieir, udfn}@essex.ac.uk
VISION-BASED POSITION ESTIMATION IN MULTIPLE QUADROTOR SYSTEMS WITH APPLICATION TO FAULT DETECTION AND RECONFIGURATION
 VISION-BASED POSITION ESTIMATION IN MULTIPLE QUADROTOR SYSTEMS WITH APPLICATION TO FAULT DETECTION AND RECONFIGURATION MASTER THESIS, 212-213 SCHOOL OF ENGINEERS, UNIVERSITY OF SEVILLE Author Alejandro
VISION-BASED POSITION ESTIMATION IN MULTIPLE QUADROTOR SYSTEMS WITH APPLICATION TO FAULT DETECTION AND RECONFIGURATION MASTER THESIS, 212-213 SCHOOL OF ENGINEERS, UNIVERSITY OF SEVILLE Author Alejandro
Removing Moving Objects from Point Cloud Scenes
 1 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky klitomis@cs.ucr.edu Abstract. Three-dimensional simultaneous localization and mapping is a topic of significant interest in the research
1 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky klitomis@cs.ucr.edu Abstract. Three-dimensional simultaneous localization and mapping is a topic of significant interest in the research
DECLARATION OF PERFORMANCE NO. HU-DOP_TD-25_001
 NO. HU-DOP_TD-25_001 Product type TD 3,5x25 mm EN 14566:2008+A1:2009 NO. HU-DOP_TD-35_001 Product type TD 3,5x35 mm EN 14566:2008+A1:2009 NO. HU-DOP_TD-45_001 Product type TD 3,5x45 mm EN 14566:2008+A1:2009
NO. HU-DOP_TD-25_001 Product type TD 3,5x25 mm EN 14566:2008+A1:2009 NO. HU-DOP_TD-35_001 Product type TD 3,5x35 mm EN 14566:2008+A1:2009 NO. HU-DOP_TD-45_001 Product type TD 3,5x45 mm EN 14566:2008+A1:2009
Cees Snoek. Machine. Humans. Multimedia Archives. Euvision Technologies The Netherlands. University of Amsterdam The Netherlands. Tree.
 Visual search: what's next? Cees Snoek University of Amsterdam The Netherlands Euvision Technologies The Netherlands Problem statement US flag Tree Aircraft Humans Dog Smoking Building Basketball Table
Visual search: what's next? Cees Snoek University of Amsterdam The Netherlands Euvision Technologies The Netherlands Problem statement US flag Tree Aircraft Humans Dog Smoking Building Basketball Table
Visibility optimization for data visualization: A Survey of Issues and Techniques
 Visibility optimization for data visualization: A Survey of Issues and Techniques Ch Harika, Dr.Supreethi K.P Student, M.Tech, Assistant Professor College of Engineering, Jawaharlal Nehru Technological
Visibility optimization for data visualization: A Survey of Issues and Techniques Ch Harika, Dr.Supreethi K.P Student, M.Tech, Assistant Professor College of Engineering, Jawaharlal Nehru Technological
Virtual Mouse Using a Webcam
 1. INTRODUCTION Virtual Mouse Using a Webcam Since the computer technology continues to grow up, the importance of human computer interaction is enormously increasing. Nowadays most of the mobile devices
1. INTRODUCTION Virtual Mouse Using a Webcam Since the computer technology continues to grow up, the importance of human computer interaction is enormously increasing. Nowadays most of the mobile devices
Circle Object Recognition Based on Monocular Vision for Home Security Robot
 Journal of Applied Science and Engineering, Vol. 16, No. 3, pp. 261 268 (2013) DOI: 10.6180/jase.2013.16.3.05 Circle Object Recognition Based on Monocular Vision for Home Security Robot Shih-An Li, Ching-Chang
Journal of Applied Science and Engineering, Vol. 16, No. 3, pp. 261 268 (2013) DOI: 10.6180/jase.2013.16.3.05 Circle Object Recognition Based on Monocular Vision for Home Security Robot Shih-An Li, Ching-Chang
Flow Separation for Fast and Robust Stereo Odometry
 Flow Separation for Fast and Robust Stereo Odometry Michael Kaess, Kai Ni and Frank Dellaert Abstract Separating sparse flow provides fast and robust stereo visual odometry that deals with nearly degenerate
Flow Separation for Fast and Robust Stereo Odometry Michael Kaess, Kai Ni and Frank Dellaert Abstract Separating sparse flow provides fast and robust stereo visual odometry that deals with nearly degenerate
Online Learning for Offroad Robots: Using Spatial Label Propagation to Learn Long Range Traversability
 Online Learning for Offroad Robots: Using Spatial Label Propagation to Learn Long Range Traversability Raia Hadsell1, Pierre Sermanet1,2, Jan Ben2, Ayse Naz Erkan1, Jefferson Han1, Beat Flepp2, Urs Muller2,
Online Learning for Offroad Robots: Using Spatial Label Propagation to Learn Long Range Traversability Raia Hadsell1, Pierre Sermanet1,2, Jan Ben2, Ayse Naz Erkan1, Jefferson Han1, Beat Flepp2, Urs Muller2,
Augmented Reality Tic-Tac-Toe
 Augmented Reality Tic-Tac-Toe Joe Maguire, David Saltzman Department of Electrical Engineering jmaguire@stanford.edu, dsaltz@stanford.edu Abstract: This project implements an augmented reality version
Augmented Reality Tic-Tac-Toe Joe Maguire, David Saltzman Department of Electrical Engineering jmaguire@stanford.edu, dsaltz@stanford.edu Abstract: This project implements an augmented reality version
Real time vehicle detection and tracking on multiple lanes
 Real time vehicle detection and tracking on multiple lanes Kristian Kovačić Edouard Ivanjko Hrvoje Gold Department of Intelligent Transportation Systems Faculty of Transport and Traffic Sciences University
Real time vehicle detection and tracking on multiple lanes Kristian Kovačić Edouard Ivanjko Hrvoje Gold Department of Intelligent Transportation Systems Faculty of Transport and Traffic Sciences University
C# Implementation of SLAM Using the Microsoft Kinect
 C# Implementation of SLAM Using the Microsoft Kinect Richard Marron Advisor: Dr. Jason Janet 4/18/2012 Abstract A SLAM algorithm was developed in C# using the Microsoft Kinect and irobot Create. Important
C# Implementation of SLAM Using the Microsoft Kinect Richard Marron Advisor: Dr. Jason Janet 4/18/2012 Abstract A SLAM algorithm was developed in C# using the Microsoft Kinect and irobot Create. Important
A Comparative Study between SIFT- Particle and SURF-Particle Video Tracking Algorithms
 A Comparative Study between SIFT- Particle and SURF-Particle Video Tracking Algorithms H. Kandil and A. Atwan Information Technology Department, Faculty of Computer and Information Sciences, Mansoura University,El-Gomhoria
A Comparative Study between SIFT- Particle and SURF-Particle Video Tracking Algorithms H. Kandil and A. Atwan Information Technology Department, Faculty of Computer and Information Sciences, Mansoura University,El-Gomhoria
Analecta Vol. 8, No. 2 ISSN 2064-7964
 EXPERIMENTAL APPLICATIONS OF ARTIFICIAL NEURAL NETWORKS IN ENGINEERING PROCESSING SYSTEM S. Dadvandipour Institute of Information Engineering, University of Miskolc, Egyetemváros, 3515, Miskolc, Hungary,
EXPERIMENTAL APPLICATIONS OF ARTIFICIAL NEURAL NETWORKS IN ENGINEERING PROCESSING SYSTEM S. Dadvandipour Institute of Information Engineering, University of Miskolc, Egyetemváros, 3515, Miskolc, Hungary,
TRENTINO - The research, training and mobility programme in Trentino - PCOFUND-GA-2008-226070
 Ricercatore: Ilya Afanasyev Soggetto ospitante: UNIVERSITA' DEGLI STUDI DI TRENTO Bando: Incoming post doc 2009 Soggetto partner (solo per outgoing): e-mail: ilya.afanasyev@unitn.it, ilya.afanasyev@gmail.com
Ricercatore: Ilya Afanasyev Soggetto ospitante: UNIVERSITA' DEGLI STUDI DI TRENTO Bando: Incoming post doc 2009 Soggetto partner (solo per outgoing): e-mail: ilya.afanasyev@unitn.it, ilya.afanasyev@gmail.com

ICT Perspectives on Big Data: Well Sorted Materials
 ICT Perspectives on Big Data: Well Sorted Materials 3 March 2015 Contents Introduction 1 Dendrogram 2 Tree Map 3 Heat Map 4 Raw Group Data 5 For an online, interactive version of the visualisations in
ICT Perspectives on Big Data: Well Sorted Materials 3 March 2015 Contents Introduction 1 Dendrogram 2 Tree Map 3 Heat Map 4 Raw Group Data 5 For an online, interactive version of the visualisations in
Team Description for RoboCup 2013 in Eindhoven, the Netherlands
 Team Description for RoboCup 2013 in Eindhoven, the Netherlands Patrick de Kok, Nicolò Girardi, Amogh Gudi, Chiel Kooijman, Georgios Methenitis, Sebastien Negrijn, Nikolaas Steenbergen, Duncan ten Velthuis,
Team Description for RoboCup 2013 in Eindhoven, the Netherlands Patrick de Kok, Nicolò Girardi, Amogh Gudi, Chiel Kooijman, Georgios Methenitis, Sebastien Negrijn, Nikolaas Steenbergen, Duncan ten Velthuis,
Static Environment Recognition Using Omni-camera from a Moving Vehicle
 Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Static Environment Recognition Using Omni-camera from a Moving Vehicle Teruko Yata, Chuck Thorpe Frank Dellaert The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 USA College of Computing
Point Cloud Simulation & Applications Maurice Fallon
 Point Cloud & Applications Maurice Fallon Contributors: MIT: Hordur Johannsson and John Leonard U. of Salzburg: Michael Gschwandtner and Roland Kwitt Overview : Dense disparity information Efficient Image
Point Cloud & Applications Maurice Fallon Contributors: MIT: Hordur Johannsson and John Leonard U. of Salzburg: Michael Gschwandtner and Roland Kwitt Overview : Dense disparity information Efficient Image
Fast Matching of Binary Features
 Fast Matching of Binary Features Marius Muja and David G. Lowe Laboratory for Computational Intelligence University of British Columbia, Vancouver, Canada {mariusm,lowe}@cs.ubc.ca Abstract There has been
Fast Matching of Binary Features Marius Muja and David G. Lowe Laboratory for Computational Intelligence University of British Columbia, Vancouver, Canada {mariusm,lowe}@cs.ubc.ca Abstract There has been
An Assistive Vision System for the Blind that Helps Find Lost Things
 An Assistive Vision System for the Blind that Helps Find Lost Things Boris Schauerte, Manel Martinez, Angela Constantinescu, and Rainer Stiefelhagen Karlsruhe Institute of Technology Institute for Anthropomatics,
An Assistive Vision System for the Blind that Helps Find Lost Things Boris Schauerte, Manel Martinez, Angela Constantinescu, and Rainer Stiefelhagen Karlsruhe Institute of Technology Institute for Anthropomatics,
SWIGS: A Swift Guided Sampling Method
 IGS: A Swift Guided Sampling Method Victor Fragoso Matthew Turk University of California, Santa Barbara 1 Introduction This supplement provides more details about the homography experiments in Section.
IGS: A Swift Guided Sampling Method Victor Fragoso Matthew Turk University of California, Santa Barbara 1 Introduction This supplement provides more details about the homography experiments in Section.
The Visual Internet of Things System Based on Depth Camera
 The Visual Internet of Things System Based on Depth Camera Xucong Zhang 1, Xiaoyun Wang and Yingmin Jia Abstract The Visual Internet of Things is an important part of information technology. It is proposed
The Visual Internet of Things System Based on Depth Camera Xucong Zhang 1, Xiaoyun Wang and Yingmin Jia Abstract The Visual Internet of Things is an important part of information technology. It is proposed
Internet based manipulator telepresence
 Internet based manipulator telepresence T ten Kate, P Zizola, B Driessen, K van Woerden TNO Institute of Applied Physics, Stieltjesweg 1, 2628 CK DELFT, The NETHERLANDS {tenkate, zizola, driessen, vwoerden}@tpd.tno.nl
Internet based manipulator telepresence T ten Kate, P Zizola, B Driessen, K van Woerden TNO Institute of Applied Physics, Stieltjesweg 1, 2628 CK DELFT, The NETHERLANDS {tenkate, zizola, driessen, vwoerden}@tpd.tno.nl
Car Racing Game. Figure 1 The Car Racing Game
 CSEE 4840 Embedded System Design Jing Shi (js4559), Mingxin Huo (mh3452), Yifan Li (yl3250), Siwei Su (ss4483) Car Racing Game -- Project Design 1 Introduction For this Car Racing Game, we would like to
CSEE 4840 Embedded System Design Jing Shi (js4559), Mingxin Huo (mh3452), Yifan Li (yl3250), Siwei Su (ss4483) Car Racing Game -- Project Design 1 Introduction For this Car Racing Game, we would like to
Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 269 Class Project Report
 Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 69 Class Project Report Junhua Mao and Lunbo Xu University of California, Los Angeles mjhustc@ucla.edu and lunbo
Automatic 3D Reconstruction via Object Detection and 3D Transformable Model Matching CS 69 Class Project Report Junhua Mao and Lunbo Xu University of California, Los Angeles mjhustc@ucla.edu and lunbo
THE MS KINECT USE FOR 3D MODELLING AND GAIT ANALYSIS IN THE MATLAB ENVIRONMENT
 THE MS KINECT USE FOR 3D MODELLING AND GAIT ANALYSIS IN THE MATLAB ENVIRONMENT A. Procházka 1,O.Vyšata 1,2,M.Vališ 1,2, M. Yadollahi 1 1 Institute of Chemical Technology, Department of Computing and Control
THE MS KINECT USE FOR 3D MODELLING AND GAIT ANALYSIS IN THE MATLAB ENVIRONMENT A. Procházka 1,O.Vyšata 1,2,M.Vališ 1,2, M. Yadollahi 1 1 Institute of Chemical Technology, Department of Computing and Control
Building an Advanced Invariant Real-Time Human Tracking System
 UDC 004.41 Building an Advanced Invariant Real-Time Human Tracking System Fayez Idris 1, Mazen Abu_Zaher 2, Rashad J. Rasras 3, and Ibrahiem M. M. El Emary 4 1 School of Informatics and Computing, German-Jordanian
UDC 004.41 Building an Advanced Invariant Real-Time Human Tracking System Fayez Idris 1, Mazen Abu_Zaher 2, Rashad J. Rasras 3, and Ibrahiem M. M. El Emary 4 1 School of Informatics and Computing, German-Jordanian
Vision-Based Blind Spot Detection Using Optical Flow
 Vision-Based Blind Spot Detection Using Optical Flow M.A. Sotelo 1, J. Barriga 1, D. Fernández 1, I. Parra 1, J.E. Naranjo 2, M. Marrón 1, S. Alvarez 1, and M. Gavilán 1 1 Department of Electronics, University
Vision-Based Blind Spot Detection Using Optical Flow M.A. Sotelo 1, J. Barriga 1, D. Fernández 1, I. Parra 1, J.E. Naranjo 2, M. Marrón 1, S. Alvarez 1, and M. Gavilán 1 1 Department of Electronics, University
3D Model based Object Class Detection in An Arbitrary View
 3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
Poker Vision: Playing Cards and Chips Identification based on Image Processing
 Poker Vision: Playing Cards and Chips Identification based on Image Processing Paulo Martins 1, Luís Paulo Reis 2, and Luís Teófilo 2 1 DEEC Electrical Engineering Department 2 LIACC Artificial Intelligence
Poker Vision: Playing Cards and Chips Identification based on Image Processing Paulo Martins 1, Luís Paulo Reis 2, and Luís Teófilo 2 1 DEEC Electrical Engineering Department 2 LIACC Artificial Intelligence
SIMULTANEOUS LOCALIZATION AND MAPPING FOR EVENT-BASED VISION SYSTEMS
 SIMULTANEOUS LOCALIZATION AND MAPPING FOR EVENT-BASED VISION SYSTEMS David Weikersdorfer, Raoul Hoffmann, Jörg Conradt 9-th International Conference on Computer Vision Systems 18-th July 2013, St. Petersburg,
SIMULTANEOUS LOCALIZATION AND MAPPING FOR EVENT-BASED VISION SYSTEMS David Weikersdorfer, Raoul Hoffmann, Jörg Conradt 9-th International Conference on Computer Vision Systems 18-th July 2013, St. Petersburg,
Keyframe-Based Real-Time Camera Tracking
 Keyframe-Based Real-Time Camera Tracking Zilong Dong 1 Guofeng Zhang 1 Jiaya Jia 2 Hujun Bao 1 1 State Key Lab of CAD&CG, Zhejiang University 2 The Chinese University of Hong Kong {zldong, zhangguofeng,
Keyframe-Based Real-Time Camera Tracking Zilong Dong 1 Guofeng Zhang 1 Jiaya Jia 2 Hujun Bao 1 1 State Key Lab of CAD&CG, Zhejiang University 2 The Chinese University of Hong Kong {zldong, zhangguofeng,
Face Recognition in Low-resolution Images by Using Local Zernike Moments
 Proceedings of the International Conference on Machine Vision and Machine Learning Prague, Czech Republic, August14-15, 014 Paper No. 15 Face Recognition in Low-resolution Images by Using Local Zernie
Proceedings of the International Conference on Machine Vision and Machine Learning Prague, Czech Republic, August14-15, 014 Paper No. 15 Face Recognition in Low-resolution Images by Using Local Zernie
New Concepts in Robotic Navigation & Mapping
 New Concepts in Robotic Navigation & Mapping Martin Adams Dept. Electrical Engineering, AMTC University of Chile (martin@ing.uchile.cl) Presentation Outline 1. Autonomous Robotics in Society. 2. What s
New Concepts in Robotic Navigation & Mapping Martin Adams Dept. Electrical Engineering, AMTC University of Chile (martin@ing.uchile.cl) Presentation Outline 1. Autonomous Robotics in Society. 2. What s
Human Behavior Analysis in Intelligent Retail Environments
 Human Behavior Analysis in Intelligent Retail Environments Andrea Ascani, Emanuele Frontoni, Adriano Mancini, Primo Zingaretti 1 D.I.I.G.A., Università Politecnica delle Marche, Ancona - Italy, {ascani,
Human Behavior Analysis in Intelligent Retail Environments Andrea Ascani, Emanuele Frontoni, Adriano Mancini, Primo Zingaretti 1 D.I.I.G.A., Università Politecnica delle Marche, Ancona - Italy, {ascani,
Probabilistic Latent Semantic Analysis (plsa)
") Probabilistic Latent Semantic Analysis (plsa) SS 2008 Bayesian Networks Multimedia Computing, Universität Augsburg Rainer.Lienhart@informatik.uni-augsburg.de www.multimedia-computing.{de,org} References
Probabilistic Latent Semantic Analysis (plsa) SS 2008 Bayesian Networks Multimedia Computing, Universität Augsburg Rainer.Lienhart@informatik.uni-augsburg.de www.multimedia-computing.{de,org} References
Analysis of Preview Behavior in E-Book System
 Analysis of Preview Behavior in E-Book System Atsushi SHIMADA *, Fumiya OKUBO, Chengjiu YIN, Misato OI, Kentaro KOJIMA, Masanori YAMADA, Hiroaki OGATA Faculty of Arts and Science, Kyushu University, Japan
Analysis of Preview Behavior in E-Book System Atsushi SHIMADA *, Fumiya OKUBO, Chengjiu YIN, Misato OI, Kentaro KOJIMA, Masanori YAMADA, Hiroaki OGATA Faculty of Arts and Science, Kyushu University, Japan
ExmoR A Testing Tool for Control Algorithms on Mobile Robots
 ExmoR A Testing Tool for Control Algorithms on Mobile Robots F. Lehmann, M. Ritzschke and B. Meffert Institute of Informatics, Humboldt University, Unter den Linden 6, 10099 Berlin, Germany E-mail: falk.lehmann@gmx.de,
ExmoR A Testing Tool for Control Algorithms on Mobile Robots F. Lehmann, M. Ritzschke and B. Meffert Institute of Informatics, Humboldt University, Unter den Linden 6, 10099 Berlin, Germany E-mail: falk.lehmann@gmx.de,
Laser Gesture Recognition for Human Machine Interaction
 International Journal of Computer Sciences and Engineering Open Access Research Paper Volume-04, Issue-04 E-ISSN: 2347-2693 Laser Gesture Recognition for Human Machine Interaction Umang Keniya 1*, Sarthak
International Journal of Computer Sciences and Engineering Open Access Research Paper Volume-04, Issue-04 E-ISSN: 2347-2693 Laser Gesture Recognition for Human Machine Interaction Umang Keniya 1*, Sarthak
An Energy-Based Vehicle Tracking System using Principal Component Analysis and Unsupervised ART Network
 Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '9) ISSN: 179-519 435 ISBN: 978-96-474-51-2 An Energy-Based Vehicle Tracking System using Principal
Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '9) ISSN: 179-519 435 ISBN: 978-96-474-51-2 An Energy-Based Vehicle Tracking System using Principal
Sensory-motor control scheme based on Kohonen Maps and AVITE model
 Sensory-motor control scheme based on Kohonen Maps and AVITE model Juan L. Pedreño-Molina, Antonio Guerrero-González, Oscar A. Florez-Giraldo, J. Molina-Vilaplana Technical University of Cartagena Department
Sensory-motor control scheme based on Kohonen Maps and AVITE model Juan L. Pedreño-Molina, Antonio Guerrero-González, Oscar A. Florez-Giraldo, J. Molina-Vilaplana Technical University of Cartagena Department
PASSENGER/PEDESTRIAN ANALYSIS BY NEUROMORPHIC VISUAL INFORMATION PROCESSING
 PASSENGER/PEDESTRIAN ANALYSIS BY NEUROMORPHIC VISUAL INFORMATION PROCESSING Woo Joon Han Il Song Han Korea Advanced Science and Technology Republic of Korea Paper Number 13-0407 ABSTRACT The physiological
PASSENGER/PEDESTRIAN ANALYSIS BY NEUROMORPHIC VISUAL INFORMATION PROCESSING Woo Joon Han Il Song Han Korea Advanced Science and Technology Republic of Korea Paper Number 13-0407 ABSTRACT The physiological
Canonical Image Selection for Large-scale Flickr Photos using Hadoop
 Canonical Image Selection for Large-scale Flickr Photos using Hadoop Guan-Long Wu National Taiwan University, Taipei Nov. 10, 2009, @NCHC Communication and Multimedia Lab ( 通 訊 與 多 媒 體 實 驗 室 ), Department
Canonical Image Selection for Large-scale Flickr Photos using Hadoop Guan-Long Wu National Taiwan University, Taipei Nov. 10, 2009, @NCHC Communication and Multimedia Lab ( 通 訊 與 多 媒 體 實 驗 室 ), Department
Tracking of Small Unmanned Aerial Vehicles
 Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: spk170@stanford.edu Aeronautics and Astronautics Stanford
Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: spk170@stanford.edu Aeronautics and Astronautics Stanford
Shape Measurement of a Sewer Pipe. Using a Mobile Robot with Computer Vision
 International Journal of Advanced Robotic Systems ARTICLE Shape Measurement of a Sewer Pipe Using a Mobile Robot with Computer Vision Regular Paper Kikuhito Kawasue 1,* and Takayuki Komatsu 1 1 Department
International Journal of Advanced Robotic Systems ARTICLE Shape Measurement of a Sewer Pipe Using a Mobile Robot with Computer Vision Regular Paper Kikuhito Kawasue 1,* and Takayuki Komatsu 1 1 Department
Face Model Fitting on Low Resolution Images
 Face Model Fitting on Low Resolution Images Xiaoming Liu Peter H. Tu Frederick W. Wheeler Visualization and Computer Vision Lab General Electric Global Research Center Niskayuna, NY, 1239, USA {liux,tu,wheeler}@research.ge.com
Face Model Fitting on Low Resolution Images Xiaoming Liu Peter H. Tu Frederick W. Wheeler Visualization and Computer Vision Lab General Electric Global Research Center Niskayuna, NY, 1239, USA {liux,tu,wheeler}@research.ge.com
Interactive Dense 3D Modeling of Indoor Environments
 Interactive Dense 3D Modeling of Indoor Environments Hao Du 1 Peter Henry 1 Xiaofeng Ren 2 Dieter Fox 1,2 Dan B Goldman 3 Steven M. Seitz 1 {duhao,peter,fox,seitz}@cs.washinton.edu xiaofeng.ren@intel.com
Interactive Dense 3D Modeling of Indoor Environments Hao Du 1 Peter Henry 1 Xiaofeng Ren 2 Dieter Fox 1,2 Dan B Goldman 3 Steven M. Seitz 1 {duhao,peter,fox,seitz}@cs.washinton.edu xiaofeng.ren@intel.com
Text Localization & Segmentation in Images, Web Pages and Videos Media Mining I
 Text Localization & Segmentation in Images, Web Pages and Videos Media Mining I Multimedia Computing, Universität Augsburg Rainer.Lienhart@informatik.uni-augsburg.de www.multimedia-computing.{de,org} PSNR_Y
Text Localization & Segmentation in Images, Web Pages and Videos Media Mining I Multimedia Computing, Universität Augsburg Rainer.Lienhart@informatik.uni-augsburg.de www.multimedia-computing.{de,org} PSNR_Y
Multi-modal Semantic Place Classification
 A. Pronobis Centre for Autonomous Systems, Royal Institute of Technology, SE-100 44 Stockholm, Sweden pronobis@csc.kth.se Multi-modal Semantic Place Classification O. Martínez Mozos Department of Computer
A. Pronobis Centre for Autonomous Systems, Royal Institute of Technology, SE-100 44 Stockholm, Sweden pronobis@csc.kth.se Multi-modal Semantic Place Classification O. Martínez Mozos Department of Computer
Android Ros Application
 Android Ros Application Advanced Practical course : Sensor-enabled Intelligent Environments 2011/2012 Presentation by: Rim Zahir Supervisor: Dejan Pangercic SIFT Matching Objects Android Camera Topic :
Android Ros Application Advanced Practical course : Sensor-enabled Intelligent Environments 2011/2012 Presentation by: Rim Zahir Supervisor: Dejan Pangercic SIFT Matching Objects Android Camera Topic :
Neural Network based Vehicle Classification for Intelligent Traffic Control
 Neural Network based Vehicle Classification for Intelligent Traffic Control Saeid Fazli 1, Shahram Mohammadi 2, Morteza Rahmani 3 1,2,3 Electrical Engineering Department, Zanjan University, Zanjan, IRAN
Neural Network based Vehicle Classification for Intelligent Traffic Control Saeid Fazli 1, Shahram Mohammadi 2, Morteza Rahmani 3 1,2,3 Electrical Engineering Department, Zanjan University, Zanjan, IRAN
::pcl::registration Registering point clouds using the Point Cloud Library.
 ntroduction Correspondences Rejection Transformation Registration Examples Outlook ::pcl::registration Registering point clouds using the Point Cloud Library., University of Bonn January 27, 2011 ntroduction
ntroduction Correspondences Rejection Transformation Registration Examples Outlook ::pcl::registration Registering point clouds using the Point Cloud Library., University of Bonn January 27, 2011 ntroduction
Discrimination of Gaze Directions Using Low-Level Eye Image Features
 Discrimination of Gaze Directions Using Low-Level Eye Image Features Yanxia Zhang Lancaster University yazhang@lancasteracuk Andreas Bulling University of Cambridge & Lancaster University andreasbulling@acmorg
Discrimination of Gaze Directions Using Low-Level Eye Image Features Yanxia Zhang Lancaster University yazhang@lancasteracuk Andreas Bulling University of Cambridge & Lancaster University andreasbulling@acmorg
2. igps Web Service Overview
 Autonomous Mobile Robots Localization with Multiples igps Web Services Camilo Christo, Edwin Carvalho, Miguel Pedro Silva and Carlos Cardeira IDMEC/IST, Technical University of Lisbon Av. Rovisco Pais,
Autonomous Mobile Robots Localization with Multiples igps Web Services Camilo Christo, Edwin Carvalho, Miguel Pedro Silva and Carlos Cardeira IDMEC/IST, Technical University of Lisbon Av. Rovisco Pais,
Cooperation Proposal between IUB Robotics and BioART at Imperial College
 Cooperation Proposal between IUB Robotics and BioART at Imperial College Stefan Markov s.markov@iu-bremen.de January 16, 2006 Abstract The project aims to establish cooperation between the International
Cooperation Proposal between IUB Robotics and BioART at Imperial College Stefan Markov s.markov@iu-bremen.de January 16, 2006 Abstract The project aims to establish cooperation between the International
Automatic Grocery Shopping Assistant
 Automatic Grocery Shopping Assistant Linda He Yi Department of Electrical Engineering Stanford University Stanford, CA heyi@stanford.edu Feiqiao Brian Yu Department of Electrical Engineering Stanford University
Automatic Grocery Shopping Assistant Linda He Yi Department of Electrical Engineering Stanford University Stanford, CA heyi@stanford.edu Feiqiao Brian Yu Department of Electrical Engineering Stanford University
EFFICIENT VEHICLE TRACKING AND CLASSIFICATION FOR AN AUTOMATED TRAFFIC SURVEILLANCE SYSTEM
 EFFICIENT VEHICLE TRACKING AND CLASSIFICATION FOR AN AUTOMATED TRAFFIC SURVEILLANCE SYSTEM Amol Ambardekar, Mircea Nicolescu, and George Bebis Department of Computer Science and Engineering University
EFFICIENT VEHICLE TRACKING AND CLASSIFICATION FOR AN AUTOMATED TRAFFIC SURVEILLANCE SYSTEM Amol Ambardekar, Mircea Nicolescu, and George Bebis Department of Computer Science and Engineering University
Mean-Shift Tracking with Random Sampling
 1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
Visual Servoing Methodology for Selective Tree Pruning by Human-Robot Collaborative System
 Ref: C0287 Visual Servoing Methodology for Selective Tree Pruning by Human-Robot Collaborative System Avital Bechar, Victor Bloch, Roee Finkelshtain, Sivan Levi, Aharon Hoffman, Haim Egozi and Ze ev Schmilovitch,
Ref: C0287 Visual Servoing Methodology for Selective Tree Pruning by Human-Robot Collaborative System Avital Bechar, Victor Bloch, Roee Finkelshtain, Sivan Levi, Aharon Hoffman, Haim Egozi and Ze ev Schmilovitch,
Traffic Flow Monitoring in Crowded Cities
 Traffic Flow Monitoring in Crowded Cities John A. Quinn and Rose Nakibuule Faculty of Computing & I.T. Makerere University P.O. Box 7062, Kampala, Uganda {jquinn,rnakibuule}@cit.mak.ac.ug Abstract Traffic
Traffic Flow Monitoring in Crowded Cities John A. Quinn and Rose Nakibuule Faculty of Computing & I.T. Makerere University P.O. Box 7062, Kampala, Uganda {jquinn,rnakibuule}@cit.mak.ac.ug Abstract Traffic
Multisensor Data Fusion and Applications
 Multisensor Data Fusion and Applications Pramod K. Varshney Department of Electrical Engineering and Computer Science Syracuse University 121 Link Hall Syracuse, New York 13244 USA E-mail: varshney@syr.edu
Multisensor Data Fusion and Applications Pramod K. Varshney Department of Electrical Engineering and Computer Science Syracuse University 121 Link Hall Syracuse, New York 13244 USA E-mail: varshney@syr.edu
Localization of Mobile Robots Using Odometry and an External Vision Sensor
 Sensors 21, 1, 3655-368; doi:1.339/s143655 OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors Article Localization of Mobile Robots Using Odometry and an External Vision Sensor Daniel Pizarro,
Sensors 21, 1, 3655-368; doi:1.339/s143655 OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors Article Localization of Mobile Robots Using Odometry and an External Vision Sensor Daniel Pizarro,
Introduction. Chapter 1
 1 Chapter 1 Introduction Robotics and automation have undergone an outstanding development in the manufacturing industry over the last decades owing to the increasing demand for higher levels of productivity
1 Chapter 1 Introduction Robotics and automation have undergone an outstanding development in the manufacturing industry over the last decades owing to the increasing demand for higher levels of productivity
The Scientific Data Mining Process
 Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Visual Mapping and Multi-modal Localisation for Anywhere AR Authoring
 Visual Mapping and Multi-modal Localisation for Anywhere AR Authoring Andrew P. Gee, Andrew Calway and Walterio Mayol-Cuevas Dept. of Computer Science, University of Bristol, UK Abstract. This paper presents
Visual Mapping and Multi-modal Localisation for Anywhere AR Authoring Andrew P. Gee, Andrew Calway and Walterio Mayol-Cuevas Dept. of Computer Science, University of Bristol, UK Abstract. This paper presents
for Ground Mobile Robots
 International Journal of Advanced Robotic Systems ARTICLE A Taxonomy of Vision Systems for Ground A Taxonomy Mobile of Vision Robots Systems for Ground Mobile Robots Invited Feature Article immediate Jesus
International Journal of Advanced Robotic Systems ARTICLE A Taxonomy of Vision Systems for Ground A Taxonomy Mobile of Vision Robots Systems for Ground Mobile Robots Invited Feature Article immediate Jesus
Binocular Vision and The Perception of Depth
 Binocular Vision and The Perception of Depth Visual Perception How one visually interprets a scene 4 forms of perception to be studied: Depth Color Temporal Motion Depth Perception How does one determine
Binocular Vision and The Perception of Depth Visual Perception How one visually interprets a scene 4 forms of perception to be studied: Depth Color Temporal Motion Depth Perception How does one determine
Understanding and Applying Kalman Filtering
 Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Understanding and Applying Kalman Filtering Lindsay Kleeman Department of Electrical and Computer Systems Engineering Monash University, Clayton 1 Introduction Objectives: 1. Provide a basic understanding
Efficient Organized Point Cloud Segmentation with Connected Components
 Efficient Organized Point Cloud Segmentation with Connected Components Alexander J. B. Trevor, Suat Gedikli, Radu B. Rusu, Henrik I. Christensen Abstract Segmentation is an important step in many perception
Efficient Organized Point Cloud Segmentation with Connected Components Alexander J. B. Trevor, Suat Gedikli, Radu B. Rusu, Henrik I. Christensen Abstract Segmentation is an important step in many perception
Segmentation & Clustering
 EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motivation Recall: Discrete filter Discretize
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motivation Recall: Discrete filter Discretize
Industrial Roadmap for Connected Machines. Sal Spada Research Director ARC Advisory Group sspada@arcweb.com
 Industrial Roadmap for Connected Machines Sal Spada Research Director ARC Advisory Group sspada@arcweb.com Industrial Internet of Things (IoT) Based upon enhanced connectivity of this stuff Connecting
Industrial Roadmap for Connected Machines Sal Spada Research Director ARC Advisory Group sspada@arcweb.com Industrial Internet of Things (IoT) Based upon enhanced connectivity of this stuff Connecting
Context-aware Library Management System using Augmented Reality
 International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 7, Number 9 (2014), pp. 923-929 International Research Publication House http://www.irphouse.com Context-aware Library
International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 7, Number 9 (2014), pp. 923-929 International Research Publication House http://www.irphouse.com Context-aware Library
High Level Describable Attributes for Predicting Aesthetics and Interestingness
 High Level Describable Attributes for Predicting Aesthetics and Interestingness Sagnik Dhar Vicente Ordonez Tamara L Berg Stony Brook University Stony Brook, NY 11794, USA tlberg@cs.stonybrook.edu Abstract
High Level Describable Attributes for Predicting Aesthetics and Interestingness Sagnik Dhar Vicente Ordonez Tamara L Berg Stony Brook University Stony Brook, NY 11794, USA tlberg@cs.stonybrook.edu Abstract
Subspace Analysis and Optimization for AAM Based Face Alignment
 Subspace Analysis and Optimization for AAM Based Face Alignment Ming Zhao Chun Chen College of Computer Science Zhejiang University Hangzhou, 310027, P.R.China zhaoming1999@zju.edu.cn Stan Z. Li Microsoft
Subspace Analysis and Optimization for AAM Based Face Alignment Ming Zhao Chun Chen College of Computer Science Zhejiang University Hangzhou, 310027, P.R.China zhaoming1999@zju.edu.cn Stan Z. Li Microsoft
2. Colour based particle filter for 3-D tracking
 MULTI-CAMERA 3-D TRACKING USING PARTICLE FILTER Pablo Barrera, José M. Cañas, Vicente Matellán, and Francisco Martín Grupo de Robótica, Universidad Rey Juan Carlos Móstoles, Madrid (Spain) {barrera,jmplaza,vmo,fmartin}@gsyc.escet.urjc.es
MULTI-CAMERA 3-D TRACKING USING PARTICLE FILTER Pablo Barrera, José M. Cañas, Vicente Matellán, and Francisco Martín Grupo de Robótica, Universidad Rey Juan Carlos Móstoles, Madrid (Spain) {barrera,jmplaza,vmo,fmartin}@gsyc.escet.urjc.es
Navigation Aid And Label Reading With Voice Communication For Visually Impaired People
 Navigation Aid And Label Reading With Voice Communication For Visually Impaired People A.Manikandan 1, R.Madhuranthi 2 1 M.Kumarasamy College of Engineering, mani85a@gmail.com,karur,india 2 M.Kumarasamy
Navigation Aid And Label Reading With Voice Communication For Visually Impaired People A.Manikandan 1, R.Madhuranthi 2 1 M.Kumarasamy College of Engineering, mani85a@gmail.com,karur,india 2 M.Kumarasamy
Master big data to optimize the oil and gas lifecycle
 Viewpoint paper Master big data to optimize the oil and gas lifecycle Information management and analytics (IM&A) helps move decisions from reactive to predictive Table of contents 4 Getting a handle on
Viewpoint paper Master big data to optimize the oil and gas lifecycle Information management and analytics (IM&A) helps move decisions from reactive to predictive Table of contents 4 Getting a handle on
Machine Learning and Data Mining. Fundamentals, robotics, recognition
 Machine Learning and Data Mining Fundamentals, robotics, recognition Machine Learning, Data Mining, Knowledge Discovery in Data Bases Their mutual relations Data Mining, Knowledge Discovery in Databases,
Machine Learning and Data Mining Fundamentals, robotics, recognition Machine Learning, Data Mining, Knowledge Discovery in Data Bases Their mutual relations Data Mining, Knowledge Discovery in Databases,
Automatic georeferencing of imagery from high-resolution, low-altitude, low-cost aerial platforms
 Automatic georeferencing of imagery from high-resolution, low-altitude, low-cost aerial platforms Amanda Geniviva, Jason Faulring and Carl Salvaggio Rochester Institute of Technology, 54 Lomb Memorial
Automatic georeferencing of imagery from high-resolution, low-altitude, low-cost aerial platforms Amanda Geniviva, Jason Faulring and Carl Salvaggio Rochester Institute of Technology, 54 Lomb Memorial
Indoor Floorplan with WiFi Coverage Map Android Application
 Indoor Floorplan with WiFi Coverage Map Android Application Bernhard Boser, Ed. Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2013-90 http://www.eecs.berkeley.edu/pubs/techrpts/2013/eecs-2013-90.html
Indoor Floorplan with WiFi Coverage Map Android Application Bernhard Boser, Ed. Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2013-90 http://www.eecs.berkeley.edu/pubs/techrpts/2013/eecs-2013-90.html
TouchPaper - An Augmented Reality Application with Cloud-Based Image Recognition Service
 TouchPaper - An Augmented Reality Application with Cloud-Based Image Recognition Service Feng Tang, Daniel R. Tretter, Qian Lin HP Laboratories HPL-2012-131R1 Keyword(s): image recognition; cloud service;
TouchPaper - An Augmented Reality Application with Cloud-Based Image Recognition Service Feng Tang, Daniel R. Tretter, Qian Lin HP Laboratories HPL-2012-131R1 Keyword(s): image recognition; cloud service;
ACCURACY ASSESSMENT OF BUILDING POINT CLOUDS AUTOMATICALLY GENERATED FROM IPHONE IMAGES
 ACCURACY ASSESSMENT OF BUILDING POINT CLOUDS AUTOMATICALLY GENERATED FROM IPHONE IMAGES B. Sirmacek, R. Lindenbergh Delft University of Technology, Department of Geoscience and Remote Sensing, Stevinweg
ACCURACY ASSESSMENT OF BUILDING POINT CLOUDS AUTOMATICALLY GENERATED FROM IPHONE IMAGES B. Sirmacek, R. Lindenbergh Delft University of Technology, Department of Geoscience and Remote Sensing, Stevinweg
LOCAL SURFACE PATCH BASED TIME ATTENDANCE SYSTEM USING FACE. indhubatchvsa@gmail.com
 LOCAL SURFACE PATCH BASED TIME ATTENDANCE SYSTEM USING FACE 1 S.Manikandan, 2 S.Abirami, 2 R.Indumathi, 2 R.Nandhini, 2 T.Nanthini 1 Assistant Professor, VSA group of institution, Salem. 2 BE(ECE), VSA
LOCAL SURFACE PATCH BASED TIME ATTENDANCE SYSTEM USING FACE 1 S.Manikandan, 2 S.Abirami, 2 R.Indumathi, 2 R.Nandhini, 2 T.Nanthini 1 Assistant Professor, VSA group of institution, Salem. 2 BE(ECE), VSA
DESIGN & DEVELOPMENT OF AUTONOMOUS SYSTEM TO BUILD 3D MODEL FOR UNDERWATER OBJECTS USING STEREO VISION TECHNIQUE
 DESIGN & DEVELOPMENT OF AUTONOMOUS SYSTEM TO BUILD 3D MODEL FOR UNDERWATER OBJECTS USING STEREO VISION TECHNIQUE N. Satish Kumar 1, B L Mukundappa 2, Ramakanth Kumar P 1 1 Dept. of Information Science,
DESIGN & DEVELOPMENT OF AUTONOMOUS SYSTEM TO BUILD 3D MODEL FOR UNDERWATER OBJECTS USING STEREO VISION TECHNIQUE N. Satish Kumar 1, B L Mukundappa 2, Ramakanth Kumar P 1 1 Dept. of Information Science,
Recognition. Sanja Fidler CSC420: Intro to Image Understanding 1 / 28
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) History of recognition techniques Object classification Bag-of-words Spatial pyramids Neural Networks Object
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) History of recognition techniques Object classification Bag-of-words Spatial pyramids Neural Networks Object
Learning tasks from observation and practice
 Robotics and Autonomous Systems 47 (2004) 163 169 Learning tasks from observation and practice Darrin C. Bentivegna a,b,, Christopher G. Atkeson a,c, Gordon Cheng a a ATR Computational Neuroscience Laboratories,
Robotics and Autonomous Systems 47 (2004) 163 169 Learning tasks from observation and practice Darrin C. Bentivegna a,b,, Christopher G. Atkeson a,c, Gordon Cheng a a ATR Computational Neuroscience Laboratories,
Overview. 1. Introduction. 2. Parts of the Project. 3. Conclusion. Motivation. Methods used in the project Results and comparison
 Institute of Integrated Sensor Systems Dept. of Electrical Engineering and Information Technology An Image Processing Application on QuickCog and Matlab Door-Key Recognition System Lei Yang Oct, 2009 Prof.
Institute of Integrated Sensor Systems Dept. of Electrical Engineering and Information Technology An Image Processing Application on QuickCog and Matlab Door-Key Recognition System Lei Yang Oct, 2009 Prof.
Make and Model Recognition of Cars
 Make and Model Recognition of Cars Sparta Cheung Department of Electrical and Computer Engineering University of California, San Diego 9500 Gilman Dr., La Jolla, CA 92093 sparta@ucsd.edu Alice Chu Department
Make and Model Recognition of Cars Sparta Cheung Department of Electrical and Computer Engineering University of California, San Diego 9500 Gilman Dr., La Jolla, CA 92093 sparta@ucsd.edu Alice Chu Department
NCC-RANSAC: A Fast Plane Extraction Method for Navigating a Smart Cane for the Visually Impaired
 NCC-RANSAC: A Fast Plane Extraction Method for Navigating a Smart Cane for the Visually Impaired X. Qian and C. Ye, Senior Member, IEEE Abstract This paper presents a new RANSAC based method for extracting
NCC-RANSAC: A Fast Plane Extraction Method for Navigating a Smart Cane for the Visually Impaired X. Qian and C. Ye, Senior Member, IEEE Abstract This paper presents a new RANSAC based method for extracting
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF
 Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter (kucsera.peter@kvk.bmf.hu) Abstract In this article an autonomous advertising mobile robot that has been realized in
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter (kucsera.peter@kvk.bmf.hu) Abstract In this article an autonomous advertising mobile robot that has been realized in
CS231M Project Report - Automated Real-Time Face Tracking and Blending
 CS231M Project Report - Automated Real-Time Face Tracking and Blending Steven Lee, slee2010@stanford.edu June 6, 2015 1 Introduction Summary statement: The goal of this project is to create an Android
CS231M Project Report - Automated Real-Time Face Tracking and Blending Steven Lee, slee2010@stanford.edu June 6, 2015 1 Introduction Summary statement: The goal of this project is to create an Android
Camera Technology Guide. Factors to consider when selecting your video surveillance cameras
 Camera Technology Guide Factors to consider when selecting your video surveillance cameras Introduction Investing in a video surveillance system is a smart move. You have many assets to protect so you
Camera Technology Guide Factors to consider when selecting your video surveillance cameras Introduction Investing in a video surveillance system is a smart move. You have many assets to protect so you