Intelligent Agents. Chapter 2
|
|
|
- Arthur Gilmore
- 7 years ago
- Views:
Transcription
1 Intelligent Agents Chapter 2
2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
3 Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Human agent: eyes, ears, and other organs for sensors; Hands, legs, mouth, and other body parts for actuators Robotic agent: cameras and infrared range finders for sensors; various motors for actuators
4 Agents and environments The agent function maps from percept histories to actions: [f: P* A] The agent program runs on the physical architecture to produce f
5 Vacuum-cleaner world Percepts: location and contents, e.g., [A,Dirty] Actions: Left, Right, Suck, NoOp
6 A vacuum-cleaner agent Percept sequence [A, Dirty] [B, Clean] [B, Dirty] [A, Clean] [A, Clean] [A, Clean] [A, Dirty] [A, Clean] [B, Clean] Action suck left suck right suck left function Reflex-Vacuum-Agent( [location, status]) returns an action if status = Dirty then return Suck else if location = A then return Right else if location = B then return Left
7 Rational agents An agent should strive to "do the right thing", based on what it can perceive and the actions it can perform. The right action is the one that will cause the agent to be most successful Performance measure: A fixed objective criterion for success of an agent's behavior E.g., performance measure of a vacuum-cleaner agent could be: one point per square cleaned up in time T one point per clean square per time step, minus one per move penalize for > k dirty squares Penalize for > m units of electricity consumed per time step Penalize for amount of noise generated
8 Rational agents Rational Agent: For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built-in knowledge the agent has.
9 Rational agents Rationality is distinct from omniscience (allknowing with infinite knowledge) action outcomes may not be as expected Rational is not equal to clairvoyant percepts may not be complete Thus rational is not equal to successful! Rationality exploration, learning, autonomy Agents can perform actions to explore environment to obtain useful information (learning by exploration) An agent is autonomous if its behavior is determined by its own experience (with ability to learn and adapt)
10 PEAS PEAS: Performance measure, Environment, Actuators, Sensors Must first specify the setting for intelligent agent design Consider, e.g., the task of designing an automated taxi driver: Performance measure Environment Actuators Sensors
11 PEAS Must first specify the setting for intelligent agent design Consider, e.g., the task of designing an automated taxi driver: Performance measure: Safe, fast, legal, comfortable trip, maximize profits Environment: Roads, other traffic, pedestrians, customers Actuators: Steering wheel, accelerator, brake, signal, horn Sensors: Cameras, sonar, speedometer, GPS, odometer, engine sensors, keyboard
12 PEAS Agent: Medical diagnosis system Performance measure: Healthy patient, minimize costs, lawsuits Environment: Patient, hospital, staff Actuators: Screen display (questions, tests, diagnoses, treatments, referrals) Sensors: Keyboard (entry of symptoms, findings, patient's answers)
13 PEAS Agent: Part-picking robot Performance measure: Percentage of parts in correct bins Environment: Conveyor belt with parts, bins Actuators: Jointed arm and hand Sensors: Camera, joint angle sensors
14 PEAS Agent: Program playing the game of checkers Performance measure: Maximize the number of games won Environment: A human opponent player Actuators: Screen display (the move chosen by the program) Sensors: Keyboard (the move chosen by the human player)
15 Environment types Fully observable (vs. partially observable): An agent's sensors give it access to the complete state of the environment at each point in time. Deterministic (vs. stochastic): The next state of the environment is completely determined by the current state and the action executed by the agent. (If the environment is deterministic except for the actions of other agents, then the environment is strategic) Episodic (vs. sequential): The agent's experience is divided into atomic "episodes" (each episode consists of the agent perceiving and then performing a single action), and the choice of action in each episode depends only on the episode itself.
16 Environment types Static (vs. dynamic): The environment is unchanged while an agent is deliberating. (The environment is semidynamic if the environment itself does not change with the passage of time but the agent's performance score does) Discrete (vs. continuous): A limited number of distinct, clearly defined percepts and actions. Single agent (vs. multiagent): An agent operating by itself in an environment.
17 Environment types Chess with Chess w/o Backgammon Taxi driving a clock a clock Fully observable Yes Yes Yes No Deterministic Strategic Strategic No No Episodic No No No No Static Semi Yes Semi No Discrete Yes Yes Yes No Single agent No No No No The environment type largely determines the agent design The real world is (of course) partially observable, stochastic, sequential, dynamic, continuous, multi-agent
18 Agent functions and programs An agent is completely specified by the agent function mapping percept sequences to actions One agent function (or a small equivalence class) is rational Aim: find a way to implement the rational agent function concisely
19 Table-lookup agent Function Table-driven-agent (percept) Returns an action append percept to the end of percepts action Lookup (percepts, table) Return action Drawbacks: Huge table Take a long time to build the table No autonomy Even with learning, need a long time to learn the table entries
20 Agent types Four basic types in order of increasing generality: Simple reflex agents Model-based reflex agents Goal-based agents Utility-based agents

21 Simple reflex agents
22 Simple reflex agents Function Simple-Reflex-Agent (percept) Returns an action static: rules, a set of condition-action rules state Interpret-Input (percept) rule Rule-Match (state, rules) action Rule-Action [rule] Return action
23 Model-based reflex agents
24 Model-based reflex agents Function Model-Based-Reflex-Agent (percept) Persistent: state, rules, action, model state Update-State (state, action, percept, model) rule Rule-Match (state, rules) action Rule-Action [rule] Return action
25 Goal-based agents
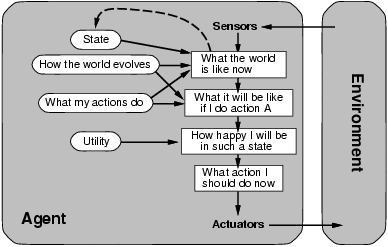
26 Utility-based agents

27 Learning agents
Artificial Intelligence
 Artificial Intelligence ICS461 Fall 2010 Nancy E. Reed nreed@hawaii.edu 1 Lecture #2- Intelligent Agents What is an intelligent? Agents and s Rationality PEAS (Performance measure, Environment, Actuators,
Artificial Intelligence ICS461 Fall 2010 Nancy E. Reed nreed@hawaii.edu 1 Lecture #2- Intelligent Agents What is an intelligent? Agents and s Rationality PEAS (Performance measure, Environment, Actuators,
Chapter 2: Intelligent Agents
 Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2 Intelligent Agents
 1 Chapter 2 Intelligent Agents CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Spring 2008 Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
1 Chapter 2 Intelligent Agents CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Spring 2008 Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
Introduction to Artificial Intelligence. Intelligent Agents
 Introduction to Artificial Intelligence Intelligent Agents Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Agents and environments PEAS (Performance,
Introduction to Artificial Intelligence Intelligent Agents Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Agents and environments PEAS (Performance,
Intelligent Agents. Chapter 2. Chapter 2 1
 Intelligent Agents Chapter 2 Chapter 2 1 Reminders Assignment 0 (lisp refresher) due 1/28 Lisp/emacs/AIMA tutorial: 11-1 today and Monday, 271 Soda Chapter 2 2 Outline Agents and environments Rationality
Intelligent Agents Chapter 2 Chapter 2 1 Reminders Assignment 0 (lisp refresher) due 1/28 Lisp/emacs/AIMA tutorial: 11-1 today and Monday, 271 Soda Chapter 2 2 Outline Agents and environments Rationality
Agents: Rationality (2)
") Agents: Intro Agent is entity that perceives and acts Perception occurs via sensors Percept is one unit of sensory input Percept sequence is complete history of agent s percepts In general, agent s actions
Agents: Intro Agent is entity that perceives and acts Perception occurs via sensors Percept is one unit of sensory input Percept sequence is complete history of agent s percepts In general, agent s actions
Introduction to Artificial Intelligence
 Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2014 http://www.ics.uci.edu/~kkask/fall-2014 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2014 http://www.ics.uci.edu/~kkask/fall-2014 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
Measuring the Performance of an Agent
 25 Measuring the Performance of an Agent The rational agent that we are aiming at should be successful in the task it is performing To assess the success we need to have a performance measure What is rational
25 Measuring the Performance of an Agent The rational agent that we are aiming at should be successful in the task it is performing To assess the success we need to have a performance measure What is rational
cs171 HW 1 - Solutions
 1. (Exercise 2.3 from RN) For each of the following assertions, say whether it is true or false and support your answer with examples or counterexamples where appropriate. (a) An agent that senses only
1. (Exercise 2.3 from RN) For each of the following assertions, say whether it is true or false and support your answer with examples or counterexamples where appropriate. (a) An agent that senses only
INTELLIGENT AGENTS 2.1 INTRODUCTION 2.2 HOW AGENTS SHOULD ACT
 2 INTELLIGENT AGENTS In which we discuss what an intelligent agent does,how it is related to its environment, how it is evaluated, and how we might go about building one. 2.1 INTRODUCTION An agent is anything
2 INTELLIGENT AGENTS In which we discuss what an intelligent agent does,how it is related to its environment, how it is evaluated, and how we might go about building one. 2.1 INTRODUCTION An agent is anything
Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots
![Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots](/thumbs/27/11692183.jpg "Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots") Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill
 Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill Objectives: Analyze the operation of sequential logic circuits. Understand the operation of digital counters.
Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill Objectives: Analyze the operation of sequential logic circuits. Understand the operation of digital counters.
Robot coined by Karel Capek in a 1921 science-fiction Czech play
 Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Intelligent Agents. Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge
 Intelligent Agents Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge Denition of an Agent An agent is a computer system capable of autonomous action in some environment, in
Intelligent Agents Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge Denition of an Agent An agent is a computer system capable of autonomous action in some environment, in
Tutorial 1. Introduction to robot
 Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
Introduction to Electronic Signals
 Introduction to Electronic Signals Oscilloscope An oscilloscope displays voltage changes over time. Use an oscilloscope to view analog and digital signals when required during circuit diagnosis. Fig. 6-01
Introduction to Electronic Signals Oscilloscope An oscilloscope displays voltage changes over time. Use an oscilloscope to view analog and digital signals when required during circuit diagnosis. Fig. 6-01
Motivation. Motivation. Can a software agent learn to play Backgammon by itself? Machine Learning. Reinforcement Learning
 Motivation Machine Learning Can a software agent learn to play Backgammon by itself? Reinforcement Learning Prof. Dr. Martin Riedmiller AG Maschinelles Lernen und Natürlichsprachliche Systeme Institut
Motivation Machine Learning Can a software agent learn to play Backgammon by itself? Reinforcement Learning Prof. Dr. Martin Riedmiller AG Maschinelles Lernen und Natürlichsprachliche Systeme Institut
TomTom HAD story How TomTom enables Highly Automated Driving
 TomTom HAD story How TomTom enables Highly Automated Driving Automotive World Webinar 12 March 2015 Jan-Maarten de Vries VP Product Marketing TomTom Automotive Automated driving is real and it is big Image:
TomTom HAD story How TomTom enables Highly Automated Driving Automotive World Webinar 12 March 2015 Jan-Maarten de Vries VP Product Marketing TomTom Automotive Automated driving is real and it is big Image:
CIM Computer Integrated Manufacturing
 INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
Rules for the IEEE Very Small Competition Version 1.0
 7th LATIN AMERICAN IEEE STUDENT ROBOTICS COMPETITION Joint with JRI 2008 (Brazilian Intelligent Robotic Journey) and SBIA 2008 (19 th Brazilian Symposium on Artificial Intelligence) Rules for the IEEE
7th LATIN AMERICAN IEEE STUDENT ROBOTICS COMPETITION Joint with JRI 2008 (Brazilian Intelligent Robotic Journey) and SBIA 2008 (19 th Brazilian Symposium on Artificial Intelligence) Rules for the IEEE
Designing Behavior-Based Systems
 Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
6.099, Spring Semester, 2006 Assignment for Week 13 1
 6.099, Spring Semester, 2006 Assignment for Week 13 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Spring Semester, 2006
6.099, Spring Semester, 2006 Assignment for Week 13 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Spring Semester, 2006
Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty
 Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty GOOGLE CAR uiopasdfghjklzxcvbnmqwertyuiopasdf Gonzalo Ghigliazza
Aguantebocawertyuiopasdfghvdslpmj klzxcvbquieromuchoanachaguilleanic oyafernmqwertyuiopasdfghjklzxcvbn mqwertyuiopasdfghjklzxcvbnmqwerty GOOGLE CAR uiopasdfghjklzxcvbnmqwertyuiopasdf Gonzalo Ghigliazza
Industrial Automation Training Academy. PLC, HMI & Drives Training Programs Duration: 6 Months (180 ~ 240 Hours)
") nfi Industrial Automation Training Academy Presents PLC, HMI & Drives Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
nfi Industrial Automation Training Academy Presents PLC, HMI & Drives Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
Drives 101. Functions of an Adjustable Frequency Drive (AFD) This lesson covers the basic functions of an Adjustable Frequency Drives (AFD).
 This lesson covers the basic functions of an Adjustable Frequency Drives (AFD).") Drives 101 Lesson 1 Functions of an Adjustable Frequency Drive (AFD) This lesson covers the basic functions of an Adjustable Frequency Drives (AFD). Outline: 3-phase AC Motor 1. Bi-Directional Operation
Drives 101 Lesson 1 Functions of an Adjustable Frequency Drive (AFD) This lesson covers the basic functions of an Adjustable Frequency Drives (AFD). Outline: 3-phase AC Motor 1. Bi-Directional Operation
2/26/2008. Sensors For Robotics. What is sensing? Why do robots need sensors? What is the angle of my arm? internal information
 Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
MVA Accident Information
 In this Report MVA Accident Information... 1 Vehicle Information... 3 Vehicular and Patient Relationship.. 4 Facts about the Patient before the MVA Accident... 4 Facts about the Patient during this MVA
In this Report MVA Accident Information... 1 Vehicle Information... 3 Vehicular and Patient Relationship.. 4 Facts about the Patient before the MVA Accident... 4 Facts about the Patient during this MVA
What is Artificial Intelligence (AI)?
?") 6.825 Techniques in Artificial Intelligence What is Artificial Intelligence (AI)? Lecture 1 1 If you're going to teach or take an AI course, it's useful to ask: "What's AI?" It's a lot of different things
6.825 Techniques in Artificial Intelligence What is Artificial Intelligence (AI)? Lecture 1 1 If you're going to teach or take an AI course, it's useful to ask: "What's AI?" It's a lot of different things
Formalizing Properties of Agents
 Formalizing Properties of Agents Richard Goodwin May 1993 CMU-CS-93-159 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract There is a wide gulf between the formal logics
Formalizing Properties of Agents Richard Goodwin May 1993 CMU-CS-93-159 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract There is a wide gulf between the formal logics
Dual or Quad Core Processor 2.2+ GHz 2 GB RAM 512 MB video card: GeForce GTS 250 or better, ATI Radeon HD 4850 or better
 Welcome to Put your Truck driving skills to the test in! Once you've completed basic training hopefully you'll be up to mastering the wide variety of tasks that lie ahead. Manoeuvring these huge vehicles
Welcome to Put your Truck driving skills to the test in! Once you've completed basic training hopefully you'll be up to mastering the wide variety of tasks that lie ahead. Manoeuvring these huge vehicles
INSPECTION BEFORE RIDING
 INSPECTION BEFORE RIDING Check the following items before riding. ITEM Engine cum transmission oil Fuel Tyres Battery Speedometer Lighting Steering Throttle Clutch Brakes Wheels WHAT TO CHECK FOR Availability
INSPECTION BEFORE RIDING Check the following items before riding. ITEM Engine cum transmission oil Fuel Tyres Battery Speedometer Lighting Steering Throttle Clutch Brakes Wheels WHAT TO CHECK FOR Availability
GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM
 Advances in Production Engineering & Management 4 (2009) 4, 255-262 ISSN 1854-6250 Technical paper GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM Ata, A., A.*; Elaryan, M.**; Gemaee, M.**;
Advances in Production Engineering & Management 4 (2009) 4, 255-262 ISSN 1854-6250 Technical paper GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM Ata, A., A.*; Elaryan, M.**; Gemaee, M.**;
Simulation-based traffic management for autonomous and connected vehicles
 Simulation-based traffic management for autonomous and connected vehicles Paweł Gora Faculty of Mathematics, Informatics and Mechanics University of Warsaw ITS Kraków, 3-4.12.2015 Axioms Vehicles may communicate
Simulation-based traffic management for autonomous and connected vehicles Paweł Gora Faculty of Mathematics, Informatics and Mechanics University of Warsaw ITS Kraków, 3-4.12.2015 Axioms Vehicles may communicate
Crucial Role of ICT for the Reinvention of the Car
 Joint EC / EPoSS / ERTRAC Expert Workshop 2011 Electric Vehicle System Integration and Architecture Crucial Role of ICT for the Reinvention of the Car Karl-Josef Kuhn Siemens Corporate Research and Technologies
Joint EC / EPoSS / ERTRAC Expert Workshop 2011 Electric Vehicle System Integration and Architecture Crucial Role of ICT for the Reinvention of the Car Karl-Josef Kuhn Siemens Corporate Research and Technologies
Contents Intelligent Agents
 Contents 1 Intelligent Agents 3 1.1 Introduction................................. 3 1.2 What are agents?.............................. 4 1.2.1 Examples of Agents........................ 7 1.2.2 Intelligent
Contents 1 Intelligent Agents 3 1.1 Introduction................................. 3 1.2 What are agents?.............................. 4 1.2.1 Examples of Agents........................ 7 1.2.2 Intelligent
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
Proceedings of the 9th WSEAS International Conference on APPLIED COMPUTER SCIENCE
 Automated Futures Trading Environment Effect on the Decision Making PETR TUCNIK Department of Information Technologies University of Hradec Kralove Rokitanskeho 62, 500 02 Hradec Kralove CZECH REPUBLIC
Automated Futures Trading Environment Effect on the Decision Making PETR TUCNIK Department of Information Technologies University of Hradec Kralove Rokitanskeho 62, 500 02 Hradec Kralove CZECH REPUBLIC
What Is an Electric Motor? How Does a Rotation Sensor Work?
 What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Shape Ape. Low- Cost Cubing and Dimensioning
 Shape Ape Low- Cost Cubing and Dimensioning 2 Warehousing & Distribution Shape Ape is a complete and low- cost solution for accurately dimensioning items and packages in warehouse, transportation, and
Shape Ape Low- Cost Cubing and Dimensioning 2 Warehousing & Distribution Shape Ape is a complete and low- cost solution for accurately dimensioning items and packages in warehouse, transportation, and
OUTCOME 1 TUTORIAL 1 - MECHATRONIC SYSTEMS AND PRODUCTS
 Unit 57: Mechatronic System Unit code: F/601/1416 QCF level: 4 Credit value: 15 OUTCOME 1 TUTORIAL 1 - MECHATRONIC SYSTEMS AND PRODUCTS 1. Understand the applications of a range of mechatronic systems
Unit 57: Mechatronic System Unit code: F/601/1416 QCF level: 4 Credit value: 15 OUTCOME 1 TUTORIAL 1 - MECHATRONIC SYSTEMS AND PRODUCTS 1. Understand the applications of a range of mechatronic systems
Introduction CHAPTER 1
 CHAPTER 1 Introduction Ever since the development of the first integrated circuits in the late 1950s the complexity of such devices doubled every 20 months. A development which has been anticipated by
CHAPTER 1 Introduction Ever since the development of the first integrated circuits in the late 1950s the complexity of such devices doubled every 20 months. A development which has been anticipated by
Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen 2004
 Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen, National Instruments Pittcon 2004 As more control and verification is needed in medical
Using NI Vision & Motion for Automated Inspection of Medical Devices and Pharmaceutical Processes. Morten Jensen, National Instruments Pittcon 2004 As more control and verification is needed in medical
DRIVING AFTER STROKE STROKE FACT SHEET G
 STROKE FACT SHEET G DRIVING AFTER STROKE Introduction This fact sheet is designed to tell you how to go about returning to driving; the sort of car you may need and how to get it modified if necessary.
STROKE FACT SHEET G DRIVING AFTER STROKE Introduction This fact sheet is designed to tell you how to go about returning to driving; the sort of car you may need and how to get it modified if necessary.
COMPACT LABEL APPLIER
 COMPACT LABEL APPLIER MODEL CLAS-1LR CLAS-1RL ML-44227 ML-44228 701 S. RIDGE AVENUE TROY, OHIO 45374-0001 937 332-3000 www.hobartcorp.com FORM 35552 (February 2014) TABLE OF CONTENTS GENERAL... 3 INSTALLATION...
COMPACT LABEL APPLIER MODEL CLAS-1LR CLAS-1RL ML-44227 ML-44228 701 S. RIDGE AVENUE TROY, OHIO 45374-0001 937 332-3000 www.hobartcorp.com FORM 35552 (February 2014) TABLE OF CONTENTS GENERAL... 3 INSTALLATION...
Automation of Object Sorting Using an Industrial Roboarm and MATLAB Based Image Processing
 Automation of Object Sorting Using an Industrial Roboarm and MATLAB Based Image Processing Prof. D. B. Rane 1, Gunjal Sagar S. 2, Nikam Devendra V. 3, Shaikh Jameer U. 4 Department of Electronic Engineering,
Automation of Object Sorting Using an Industrial Roboarm and MATLAB Based Image Processing Prof. D. B. Rane 1, Gunjal Sagar S. 2, Nikam Devendra V. 3, Shaikh Jameer U. 4 Department of Electronic Engineering,
Learning is a very general term denoting the way in which agents:
 What is learning? Learning is a very general term denoting the way in which agents: Acquire and organize knowledge (by building, modifying and organizing internal representations of some external reality);
What is learning? Learning is a very general term denoting the way in which agents: Acquire and organize knowledge (by building, modifying and organizing internal representations of some external reality);
CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation. Prof. Dr. Hani Hagras
 1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
The ecar in it s infrastructure smart grid -mobilityof thefuture?
 The ecar in it s infrastructure smart grid -mobilityof thefuture? Internationale Kick-off Konferenz CO2NeuTrAlp Kempten 29. September 2009 Corporate Technology Prof. Dr.-Ing. Gernot Spiegelberg CT T P
The ecar in it s infrastructure smart grid -mobilityof thefuture? Internationale Kick-off Konferenz CO2NeuTrAlp Kempten 29. September 2009 Corporate Technology Prof. Dr.-Ing. Gernot Spiegelberg CT T P
Section Sixteen. Transportation
 Section Sixteen Transportation Section 16 TRANSPORTATION Lakehead District School Board Policies and Procedures Lakehead District School Board services a very large area. With the intent of providing this
Section Sixteen Transportation Section 16 TRANSPORTATION Lakehead District School Board Policies and Procedures Lakehead District School Board services a very large area. With the intent of providing this
AI: A Modern Approach, Chpts. 3-4 Russell and Norvig
 AI: A Modern Approach, Chpts. 3-4 Russell and Norvig Sequential Decision Making in Robotics CS 599 Geoffrey Hollinger and Gaurav Sukhatme (Some slide content from Stuart Russell and HweeTou Ng) Spring,
AI: A Modern Approach, Chpts. 3-4 Russell and Norvig Sequential Decision Making in Robotics CS 599 Geoffrey Hollinger and Gaurav Sukhatme (Some slide content from Stuart Russell and HweeTou Ng) Spring,
GOAL: Get a Drivers License
 GOAL: Get a Drivers License Contributed by Tammera Gist, National City Public Library Overview Having a drivers license allows you to legally drive in the United States. A drivers license means you can
GOAL: Get a Drivers License Contributed by Tammera Gist, National City Public Library Overview Having a drivers license allows you to legally drive in the United States. A drivers license means you can
Commentary Drive Assessment
 Commentary Drive Assessment Time start: Time finish: Candidate s Name: Candidate s Email: Date of Assessment: Location: Candidate s Supervisor: Supervisors Contact Number: Supervisors Email: Assessor s
Commentary Drive Assessment Time start: Time finish: Candidate s Name: Candidate s Email: Date of Assessment: Location: Candidate s Supervisor: Supervisors Contact Number: Supervisors Email: Assessor s
G PART NUMBER OF CONNECTORS
 A 1 A/C Ambient Temp. Sensor 90980 11070 Buckle SW RH (w/ Power Seat) A/C Condenser Fan Motor (1G FE) 90980 10928 B 9 Buckle SW RH (w/o Power Seat) 90980 11212 A 2 A/C Condenser Fan Motor (2JZ GE) 90980
A 1 A/C Ambient Temp. Sensor 90980 11070 Buckle SW RH (w/ Power Seat) A/C Condenser Fan Motor (1G FE) 90980 10928 B 9 Buckle SW RH (w/o Power Seat) 90980 11212 A 2 A/C Condenser Fan Motor (2JZ GE) 90980
INDUSTRIAL, PERSONAL, AND SERVICE ROBOTS
 55 CHAPTER 5 INDUSTRIAL, PERSONAL, AND SERVICE ROBOTS Vijay Kumar, George Bekey, Yuan Zheng INTRODUCTION Robots can be classified into different categories depending on their function and the market needs
55 CHAPTER 5 INDUSTRIAL, PERSONAL, AND SERVICE ROBOTS Vijay Kumar, George Bekey, Yuan Zheng INTRODUCTION Robots can be classified into different categories depending on their function and the market needs
FRC WPI Robotics Library Overview
 FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
FRC WPI Robotics Library Overview Contents 1.1 Introduction 1.2 RobotDrive 1.3 Sensors 1.4 Actuators 1.5 I/O 1.6 Driver Station 1.7 Compressor 1.8 Camera 1.9 Utilities 1.10 Conclusion Introduction In this
Lecture 1: Introduction to Reinforcement Learning
 Lecture 1: Introduction to Reinforcement Learning David Silver Outline 1 Admin 2 About Reinforcement Learning 3 The Reinforcement Learning Problem 4 Inside An RL Agent 5 Problems within Reinforcement Learning
Lecture 1: Introduction to Reinforcement Learning David Silver Outline 1 Admin 2 About Reinforcement Learning 3 The Reinforcement Learning Problem 4 Inside An RL Agent 5 Problems within Reinforcement Learning
How To Use First Robot With Labview
 FIRST Robotics LabVIEW Training SECTION 1: LABVIEW OVERVIEW What is LabVIEW? It is a tool used by scientists and engineers to measure and automate the universe around us It is a graphical programming
FIRST Robotics LabVIEW Training SECTION 1: LABVIEW OVERVIEW What is LabVIEW? It is a tool used by scientists and engineers to measure and automate the universe around us It is a graphical programming
Appendix A. About RailSys 3.0. A.1 Introduction
 Appendix A About RailSys 3.0 This appendix describes the software system for analysis RailSys used to carry out the different computational experiments and scenario designing required for the research
Appendix A About RailSys 3.0 This appendix describes the software system for analysis RailSys used to carry out the different computational experiments and scenario designing required for the research
Ping Pong Game with Touch-screen. March 2012
 Ping Pong Game with Touch-screen March 2012 xz2266 Xiang Zhou hz2256 Hao Zheng rz2228 Ran Zheng yc2704 Younggyun Cho Abstract: This project is conducted using the Altera DE2 development board. We are aiming
Ping Pong Game with Touch-screen March 2012 xz2266 Xiang Zhou hz2256 Hao Zheng rz2228 Ran Zheng yc2704 Younggyun Cho Abstract: This project is conducted using the Altera DE2 development board. We are aiming
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
Course Outline Department of Computing Science Faculty of Science. COMP 3710-3 Applied Artificial Intelligence (3,1,0) Fall 2015
 Fall 2015") Course Outline Department of Computing Science Faculty of Science COMP 710 - Applied Artificial Intelligence (,1,0) Fall 2015 Instructor: Office: Phone/Voice Mail: E-Mail: Course Description : Students
Course Outline Department of Computing Science Faculty of Science COMP 710 - Applied Artificial Intelligence (,1,0) Fall 2015 Instructor: Office: Phone/Voice Mail: E-Mail: Course Description : Students
Spaceball7. Manual Outlet Version 1
 Spaceball7 Manual Outlet Version 1 Table of contents 1 Spaceball7 Main View...3 2 Bingo-Mode... 4 3 Spaceball7 special bets ("Super7")...5 4 Bet slip... 6 5 Spaceball7 draw...7 6 Display of past drawing
Spaceball7 Manual Outlet Version 1 Table of contents 1 Spaceball7 Main View...3 2 Bingo-Mode... 4 3 Spaceball7 special bets ("Super7")...5 4 Bet slip... 6 5 Spaceball7 draw...7 6 Display of past drawing
INFO DIAG DIAGNOSTIC TOOLS CITROËN SELLING DEALERS : AUTHORISED REPAIRERS :
 CITROËN AFTER SALES DIVISION TECHNICAL SERVICES INFO DIAG DIAGNOSTIC TOOLS CITROËN SELLING DEALERS : - PDI technicians - Campaign co-ordinators AUTHORISED REPAIRERS : - Service Managers - Consultant technicians
CITROËN AFTER SALES DIVISION TECHNICAL SERVICES INFO DIAG DIAGNOSTIC TOOLS CITROËN SELLING DEALERS : - PDI technicians - Campaign co-ordinators AUTHORISED REPAIRERS : - Service Managers - Consultant technicians
Long Beach Community College District Date Adopted: October 9, 2007. CLASS SPECIFICATION Vocational Instructional Technician Diesel Mechanics
 Long Beach Community College District Date Adopted: October 9, 2007 CLASS SPECIFICATION Vocational Instructional Technician Diesel Mechanics FLSA Status: EEOC Job Category: Union Representation: Nonexempt
Long Beach Community College District Date Adopted: October 9, 2007 CLASS SPECIFICATION Vocational Instructional Technician Diesel Mechanics FLSA Status: EEOC Job Category: Union Representation: Nonexempt
Simple. Intelligent. The SIMATIC VS 100 Series. simatic MACHINE VISION. www.siemens.com/machine-vision
 Simple. Intelligent. The SIMATIC VS 100 Series. simatic MACHINE VISION www.siemens.com/machine-vision simatic Intelligence that pays off In answer to the problem of steadily increasing clock-pulse rates
Simple. Intelligent. The SIMATIC VS 100 Series. simatic MACHINE VISION www.siemens.com/machine-vision simatic Intelligence that pays off In answer to the problem of steadily increasing clock-pulse rates
Adaptive Cruise Control System Overview
 5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
Operations & Maintenance 101 Maintenance Strategies and Work Practices to Reduce Costs
 2003 Emerson Process Management. All rights reserved. View this and other courses online at www.plantwebuniversity.com. Operations & Maintenance 101 Maintenance Strategies and Work Practices to Reduce
2003 Emerson Process Management. All rights reserved. View this and other courses online at www.plantwebuniversity.com. Operations & Maintenance 101 Maintenance Strategies and Work Practices to Reduce
Artificial Intelligence and Robotics @ Politecnico di Milano. Presented by Matteo Matteucci
 1 Artificial Intelligence and Robotics @ Politecnico di Milano Presented by Matteo Matteucci What is Artificial Intelligence «The field of theory & development of computer systems able to perform tasks
1 Artificial Intelligence and Robotics @ Politecnico di Milano Presented by Matteo Matteucci What is Artificial Intelligence «The field of theory & development of computer systems able to perform tasks
Swivel seats. Boot hoists. Steering aids. Hand controls. car adaptations. for all car Manufacturers SIRUSAUTOMOTIVE.CO.UK
 Boot hoists Swivel seats Steering aids Hand controls car adaptations for all car Manufacturers SIRUSAUTOMOTIVE.CO.UK 2 Many people will experience difficulty whilst driving or using a car at some point
Boot hoists Swivel seats Steering aids Hand controls car adaptations for all car Manufacturers SIRUSAUTOMOTIVE.CO.UK 2 Many people will experience difficulty whilst driving or using a car at some point
Microcontrollers, Actuators and Sensors in Mobile Robots
 SISY 2006 4 th Serbian-Hungarian Joint Symposium on Intelligent Systems Microcontrollers, Actuators and Sensors in Mobile Robots István Matijevics Polytechnical Engineering College, Subotica, Serbia mistvan@vts.su.ac.yu
SISY 2006 4 th Serbian-Hungarian Joint Symposium on Intelligent Systems Microcontrollers, Actuators and Sensors in Mobile Robots István Matijevics Polytechnical Engineering College, Subotica, Serbia mistvan@vts.su.ac.yu
Introduction to Robotics. Vikram Kapila, Associate Professor, Mechanical Engineering
 Introduction to Robotics Vikram Kapila, Associate Professor, Mechanical Engineering Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was
Introduction to Robotics Vikram Kapila, Associate Professor, Mechanical Engineering Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was
Automated Bottle Filling System
 Automated Bottle Filling System Bipin Mashilkar 1, Pallavi Khaire 1, Girish Dalvi 1 1 Assistant Professor, Department of Mechanical Engineering, Fr.C.Rodrigues Institute of Technology, Maharashtra, India
Automated Bottle Filling System Bipin Mashilkar 1, Pallavi Khaire 1, Girish Dalvi 1 1 Assistant Professor, Department of Mechanical Engineering, Fr.C.Rodrigues Institute of Technology, Maharashtra, India
Classroom Activities. These educational materials were developed by the Carnegie Science Center <http://www.carnegiesciencecenter.org/>.
 Classroom Activities These materials are designed to increase students' understanding about what makes a robot a robot, how robots sense, think, and act as well as the uses and limitations of working robots.
Classroom Activities These materials are designed to increase students' understanding about what makes a robot a robot, how robots sense, think, and act as well as the uses and limitations of working robots.
CHAPTER 14 Understanding an App s Architecture
 CHAPTER 14 Understanding an App s Architecture Figure 14-1. This chapter examines the structure of an app from a programmer s perspective. It begins with the traditional analogy that an app is like a recipe
CHAPTER 14 Understanding an App s Architecture Figure 14-1. This chapter examines the structure of an app from a programmer s perspective. It begins with the traditional analogy that an app is like a recipe
CSC384 Intro to Artificial Intelligence
 CSC384 Intro to Artificial Intelligence What is Artificial Intelligence? What is Intelligence? Are these Intelligent? CSC384, University of Toronto 3 What is Intelligence? Webster says: The capacity to
CSC384 Intro to Artificial Intelligence What is Artificial Intelligence? What is Intelligence? Are these Intelligent? CSC384, University of Toronto 3 What is Intelligence? Webster says: The capacity to
A Review of Intelligent Agents
 A Review of Intelligent Agents K.Suganya 1 1 Associate Professor, Department of Software Engineering & IT(PG), A.V.C College of Engineering, Mayiladuthurai Email- ksuganya2002@yahoo.com ABSTRACT An intelligent
A Review of Intelligent Agents K.Suganya 1 1 Associate Professor, Department of Software Engineering & IT(PG), A.V.C College of Engineering, Mayiladuthurai Email- ksuganya2002@yahoo.com ABSTRACT An intelligent
PEUGEOT e-hdi STOP/START TECHNOLOGY MEDIA KIT
 PEUGEOT e-hdi STOP/START TECHNOLOGY MEDIA KIT PEUGEOT e-hdi TECHNOLOGY INTRODUCTION In designing the new generation of Euro 5 HDi engines - a project in which Peugeot has invested more than 1billion the
PEUGEOT e-hdi STOP/START TECHNOLOGY MEDIA KIT PEUGEOT e-hdi TECHNOLOGY INTRODUCTION In designing the new generation of Euro 5 HDi engines - a project in which Peugeot has invested more than 1billion the
Building Instructions: Maze Robot
 Building Instructions: Maze Robot Basic Design from: Building Robots with Lego Mindstorms Modifications by: David Wang Diagrams and Instructions by: David Wang Diagrams and Instructions generated by: MLCad,
Building Instructions: Maze Robot Basic Design from: Building Robots with Lego Mindstorms Modifications by: David Wang Diagrams and Instructions by: David Wang Diagrams and Instructions generated by: MLCad,
PROGRAMMABLE LOGIC CONTROLLERS Unit code: A/601/1625 QCF level: 4 Credit value: 15 OUTCOME 3 PART 1
 UNIT 22: PROGRAMMABLE LOGIC CONTROLLERS Unit code: A/601/1625 QCF level: 4 Credit value: 15 OUTCOME 3 PART 1 This work covers part of outcome 3 of the Edexcel standard module: Outcome 3 is the most demanding
UNIT 22: PROGRAMMABLE LOGIC CONTROLLERS Unit code: A/601/1625 QCF level: 4 Credit value: 15 OUTCOME 3 PART 1 This work covers part of outcome 3 of the Edexcel standard module: Outcome 3 is the most demanding
Aria Etemad Arne Bartels Volkswagen Group Research. A Stepwise Market Introduction of Automated Driving. Detroit 10 September 2014
 Aria Etemad Arne Bartels Volkswagen Group Research A Stepwise Market Introduction of Automated Driving Detroit 10 September 2014 //Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration:
Aria Etemad Arne Bartels Volkswagen Group Research A Stepwise Market Introduction of Automated Driving Detroit 10 September 2014 //Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration:
By: M.Habibullah Pagarkar Kaushal Parekh Jogen Shah Jignasa Desai Prarthna Advani Siddhesh Sarvankar Nikhil Ghate
 AUTOMATED VEHICLE CONTROL SYSTEM By: M.Habibullah Pagarkar Kaushal Parekh Jogen Shah Jignasa Desai Prarthna Advani Siddhesh Sarvankar Nikhil Ghate Third Year Information Technology Engineering V.E.S.I.T.
AUTOMATED VEHICLE CONTROL SYSTEM By: M.Habibullah Pagarkar Kaushal Parekh Jogen Shah Jignasa Desai Prarthna Advani Siddhesh Sarvankar Nikhil Ghate Third Year Information Technology Engineering V.E.S.I.T.
8.70 m. Loading and cleaning machine. Technical innovation
 Class Leaders Loading and cleaning machine Technical innovation Effective cleaning Careful handling of beets Tremendous load-carrying capacity Very high user-safety The euro MAUS has been greatly improved
Class Leaders Loading and cleaning machine Technical innovation Effective cleaning Careful handling of beets Tremendous load-carrying capacity Very high user-safety The euro MAUS has been greatly improved
National ICE Hockey Officials Association
 National ICE Hockey Officials Association 2012 OFFICIATING MECHANICS 2 Referees & 1 inesman 1 Face-off - Dropping the Puck The official dropping the puck shall set the players and hold the puck at the
National ICE Hockey Officials Association 2012 OFFICIATING MECHANICS 2 Referees & 1 inesman 1 Face-off - Dropping the Puck The official dropping the puck shall set the players and hold the puck at the
Game Playing in the Real World. Next time: Knowledge Representation Reading: Chapter 7.1-7.3
 Game Playing in the Real World Next time: Knowledge Representation Reading: Chapter 7.1-7.3 1 What matters? Speed? Knowledge? Intelligence? (And what counts as intelligence?) Human vs. machine characteristics
Game Playing in the Real World Next time: Knowledge Representation Reading: Chapter 7.1-7.3 1 What matters? Speed? Knowledge? Intelligence? (And what counts as intelligence?) Human vs. machine characteristics
WATC Merit Badge College 2016 Game Design
 WATC Merit Badge College 2016 Game Design You need to print this form and bring it with you to Merit Badge College. Highlighted areas are to be completed outside of class. Note: For requirements 5-7, your
WATC Merit Badge College 2016 Game Design You need to print this form and bring it with you to Merit Badge College. Highlighted areas are to be completed outside of class. Note: For requirements 5-7, your
Autoliv The Worldwide Leader in Automotive Safety
 Autoliv The Worldwide Leader in Automotive Safety EXANE BNP PARIBAS,Stutgart Henrik Kaar Oliver Briemle October 1, 2014 Driven for Life. Autoliv, Inc. All Rights Reserved. Safe Harbor Statement * This
Autoliv The Worldwide Leader in Automotive Safety EXANE BNP PARIBAS,Stutgart Henrik Kaar Oliver Briemle October 1, 2014 Driven for Life. Autoliv, Inc. All Rights Reserved. Safe Harbor Statement * This
Hybrid System for Driver Assistance
 International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 15 (2014), pp. 1583-1587 International Research Publications House http://www. irphouse.com Hybrid System
International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 15 (2014), pp. 1583-1587 International Research Publications House http://www. irphouse.com Hybrid System
INSTALLATION MANUAL 3RP / 5RP 4-BUTTON SERIES VEHICLE SECURITY SYSTEMS
 3RP / 5RP 4-BUTTON SERIES VEHICLE SECURITY SYSTEMS INSTALLATION MANUAL Before you begin the installation Read the INSTRUCTIONS! Always use a multi-meter when verifying vehicle wiring. Before mounting the
3RP / 5RP 4-BUTTON SERIES VEHICLE SECURITY SYSTEMS INSTALLATION MANUAL Before you begin the installation Read the INSTRUCTIONS! Always use a multi-meter when verifying vehicle wiring. Before mounting the
Safety Car Drive by Using Ultrasonic And Radar Sensors
 Safety Car Drive by Using Ultrasonic And Radar Sensors 1 Ms C.Suganya, 2 Ms A.Sivasankari 1,2 Department of Computer Science, D.K.M College for Women(Autonomous), Vellore, Tamil Nadu, India. Abstract -
Safety Car Drive by Using Ultrasonic And Radar Sensors 1 Ms C.Suganya, 2 Ms A.Sivasankari 1,2 Department of Computer Science, D.K.M College for Women(Autonomous), Vellore, Tamil Nadu, India. Abstract -
Tools and Operational Data Available. 15.12.2015 1 st RESOLUTE Workshop, Florence
 Tools and Operational Data Available Athens Transport Tools and Operational Data Operations Control Center (OCC): mimic panels, operations modi (full, downgraded, manual) Metro Security Systems: sensors
Tools and Operational Data Available Athens Transport Tools and Operational Data Operations Control Center (OCC): mimic panels, operations modi (full, downgraded, manual) Metro Security Systems: sensors
BrainMaster Macromedia Flash Player
 BrainMaster Macromedia Flash Player The BrainMaster Macromedia Flash Player is a built-in extension that provides the 2.5SE software with the ability to play Flash programs in real time, and to control
BrainMaster Macromedia Flash Player The BrainMaster Macromedia Flash Player is a built-in extension that provides the 2.5SE software with the ability to play Flash programs in real time, and to control
Sentrollers and The Internet of Things
 White Paper May-2013 Sentrollers and The Internet of Things By: Cees Links, Founder and CEO GreenPeak Technologies www.greenpeak.com The new buzzword floating around the world is the Internet of Things,
White Paper May-2013 Sentrollers and The Internet of Things By: Cees Links, Founder and CEO GreenPeak Technologies www.greenpeak.com The new buzzword floating around the world is the Internet of Things,
Automotive HMI: Current status and future challenges
 Major achievements last ten years Advanced display technologies have changed the dashboard layout from a rather static to a more flexible, dynamic and adaptable design Haptic devices have become available,
Major achievements last ten years Advanced display technologies have changed the dashboard layout from a rather static to a more flexible, dynamic and adaptable design Haptic devices have become available,
Traffic Safety Quiz Show. Grade level: 4/5
 Traffic Safety Quiz Show Grade level: 4/5 Introduction: In this activity, students play a game that allows them to demonstrate and develop bicycle and pedestrian safety knowledge. The game is based on
Traffic Safety Quiz Show Grade level: 4/5 Introduction: In this activity, students play a game that allows them to demonstrate and develop bicycle and pedestrian safety knowledge. The game is based on
Existing safety technology is the driverless vehicle already here? Matthew Avery Safety Research Director
 Existing safety technology is the driverless vehicle already here? Matthew Avery Safety Research Director Automotive Safety Primary vs Secondary Safety Primary Safety Secondary Safety Tertiary Safety Pre-crash
Existing safety technology is the driverless vehicle already here? Matthew Avery Safety Research Director Automotive Safety Primary vs Secondary Safety Primary Safety Secondary Safety Tertiary Safety Pre-crash
Other 555 based and 8051 based projects...
 Dear Engineer, We at ARK Technosolutions try to bring out the Innovative side in budding engineers by providing them workshops, which emphasise on Practical Knowledge which they do not seek in their daily
Dear Engineer, We at ARK Technosolutions try to bring out the Innovative side in budding engineers by providing them workshops, which emphasise on Practical Knowledge which they do not seek in their daily
The Role of Big Data and Analytics in the Move Toward Scientific Transportation Engineering
 The Role of Big Data and Analytics in the Move Toward Scientific Transportation Engineering Bob McQueen CEO The 0cash Company Orlando, Florida bobmcqueen@0cash.com Topics Introduction Smart cities What
The Role of Big Data and Analytics in the Move Toward Scientific Transportation Engineering Bob McQueen CEO The 0cash Company Orlando, Florida bobmcqueen@0cash.com Topics Introduction Smart cities What
Grenzenlos wissen Von der Region in die Welt. Automatisierung von Fahrzeugen
 3. Wissenschaftstag der Europäischen Metropolregion Nürnberg Di, 26. Mai 2009 Hochschule Amberg-Weiden, ACC Grenzenlos wissen Von der Region in die Welt Automatisierung von Fahrzeugen Das EU-Forschungsprojekt
3. Wissenschaftstag der Europäischen Metropolregion Nürnberg Di, 26. Mai 2009 Hochschule Amberg-Weiden, ACC Grenzenlos wissen Von der Region in die Welt Automatisierung von Fahrzeugen Das EU-Forschungsprojekt
Advanced Vehicle Safety Control System
 Hitachi Review Vol. 63 (2014), No. 2 116 Advanced Vehicle Safety Control System Hiroshi Kuroda, Dr. Eng. Atsushi Yokoyama Taisetsu Tanimichi Yuji Otsuka OVERVIEW: Hitachi has been working on the development
Hitachi Review Vol. 63 (2014), No. 2 116 Advanced Vehicle Safety Control System Hiroshi Kuroda, Dr. Eng. Atsushi Yokoyama Taisetsu Tanimichi Yuji Otsuka OVERVIEW: Hitachi has been working on the development