CS W4701 Artificial Intelligence
|
|
|
- Erick Golden
- 7 years ago
- Views:
Transcription
1 CS W4701 Artificial Intelligence Fall 2013 Chapter 2: Intelligent Agents Jonathan Voris (based on slides by Sal Stolfo)
2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
3 Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Human agent: Sensors: Eyes, ears, and other Actuators: Hands, legs, mouth, and other body Robotic agent: Sensors: Cameras and infrared range finders Actuators: Various motors Agents vs non-agents?
4 Agents and Environments The agent function maps from percept histories to actions: [f: P* A] The agent program runs on the physical architecture to produce the agent function Agent function: Mathematical abstraction Agent program: Concrete implementation Agent = architecture + program

5 Vacuum-cleaner world Percepts: location and contents e.g., [A, Dirty] Actions: Left, Right, Suck, NoOp
6 Rational Agents Recall: Rational = Doing the right thing Okay, but what s that? What are the consequences of the agent s actions on the state of its environment? Sequence of agent actions -> sequence of environmental states How to control agent? Introduce performance measure An objective criterion for success of an agent's behavior Possible performance measures for vacuum world? Evaluate performance of environment or that of agent?
7 Rational Agents Rational Agent: For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built-in knowledge the agent has.
8 Rational Agents Rationality is relative to a performance measure Once you have an agent, judge rationality based on: Performance measure Environmental knowledge Possible actions Sensors and accuracy
9 Rational Agents Rationality is distinct from omniscience Optimizing expected performance vs observed performance Only relying on observations so far Agents can perform actions in order to modify future percepts so as to obtain useful information Information gathering: actions which intend to modify future precepts Exploration An agent is autonomous if its behavior is determined by its own experience (with ability to learn and adapt) Agent street smarts vs book smarts
10 Environments Four elements of a task environment: PEAS Performance measure Environment Actuators Sensors Must first specify the setting for intelligent agent design
11 Environments Must first specify the setting for intelligent agent design Consider, e.g., the task of designing an automated taxi driver: Performance measure: Safe, fast, legal, comfortable trip, maximize profits Environment: Roads, other traffic, pedestrians, customers Actuators: Steering wheel, accelerator, brake, signal, horn Sensors: Cameras, sonar, speedometer, GPS, odometer, engine sensors, keyboard
12 Environments Agent: Medical diagnosis system Performance measure: Healthy patient, minimize costs, lawsuits Environment: Patient, hospital, staff Actuators: Screen display (questions, tests, diagnoses, treatments, referrals) Sensors: Keyboard (entry of symptoms, findings, patient's answers)
13 Environments Agent: Part-picking robot Performance measure: Percentage of parts in correct bins Environment: Conveyor belt with parts, bins Actuators: Jointed arm and hand Sensors: Camera, joint angle sensors
14 Environments Agent: Interactive English tutor Performance measure: Maximize student's score on test Environment: Set of students Actuators: Screen display (exercises, suggestions, corrections) Sensors: Keyboard
15 Environment types Fully observable (vs. partially observable): An agent's sensors give it access to the complete state of the environment at each point in time. Deterministic (vs. stochastic): The next state of the environment is completely determined by the current state and the action executed by the agent. (If the environment is deterministic except for the actions of other agents, then the environment is strategic) Episodic (vs. sequential): The agent's experience is divided into atomic "episodes" (each episode consists of the agent perceiving and then performing a single action), and the choice of action in each episode depends only on the episode itself. Next episode not affected by actions in previous episode
16 Environment types Static (vs. dynamic): The environment is unchanged while an agent is deliberating. (The environment is semidynamic if the environment itself does not change with the passage of time but the agent's performance score does) Discrete (vs. continuous): A limited number of distinct, clearly defined percepts and actions. Single agent (vs. multiagent): An agent operating by itself in an environment.
17 Environment types Chess with Chess without Taxi driving a clock a clock Fully observable Yes Yes No Deterministic Strategic Strategic No Episodic No No No Static Semi Yes No Discrete Yes Yes No Single agent No No No The environment type largely determines the agent design The real world is (of course) partially observable, stochastic, sequential, dynamic, continuous, multi-agent
18 Agent Functions and Programs An agent is completely specified by the agent function mapping percept sequences to actions Describes agent s behavior Job of AI: design an agent program which implements the agent function Describes how the agent works Program must suit architecture Inputs: Agent Program: Current percept Agent Function: Percept history
19 Agent Functions and Programs One agent function (or a small equivalence class) is rational Aim: find a way to implement the rational agent function concisely
20 Table Lookup Agent Drawbacks: Huge table Take a long time to build the table No autonomy Even with learning, need a long time to learn the table entries
21 Table Lookup Agent Why a chess table agent is a bad idea: Not enough space in universe to store table Would take longer than your life to build Too massive to be learned through observation Where do you start? Reminder: The fact that a program can find a solution in principle does not mean that the program contains any of the mechanisms needed to find it in practice
22 Simple Reflex Agents Forget the precept history! Can t we just act on the current state?

23 Simple Reflex Agents
24 Simple Reflex Agents Pros: Simple Cons: For this to produce rational agents the environment must be? Often yield infinite loops Randomization can help but only so much
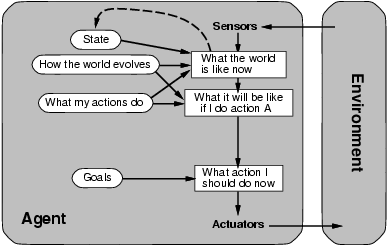
25 Model-based Reflex Agents That didn t turn out so well Let s try keeping track of what we can t currently observe Internal state to track Is that car braking? Is there a car in my blind spot?? Where did I park???
26 Model-based Reflex Agents
27 Model-based Reflex Agents Getting better! But sometimes model is insufficient: Impossible to model hidden world accurately and reliably What to do when environment doesn t imply action? i.e., fork in the road
28 Goal-based agents Let s introduce a goal concept Describe desirable situations Agent will account for the future
29 Goal-based agents
30 Utility-based Agents Goals are binary Did you meet it or not? What about a relative measure of achievement? Economists named this utility Utility function: an agent s internal performance measure An agent is rational if its utility function matches its environments performance measure
31 Utility-based Agents
32 Utility-based Agents Utility function is not always needed to be rational But rational agents must act like they have one Needed when: Goals conflict Uncertain goals
33 Learning Agents That s nice but how do you program these things? By hand? Turing says: That s for chumps Let the agent figure things out by itself! Learning element Makes improvements to performance element Performance element Selects actions Previously this was the whole agent
34 Learning Agents New components: Learning element Makes improvements to performance element Performance element Selects actions Previously this was the whole agent Critic Gives performance feedback to learning element Needed because precepts don t capture performance Problem generator Suggests innovative actions

35 Learning Agents
Artificial Intelligence
 Artificial Intelligence ICS461 Fall 2010 Nancy E. Reed nreed@hawaii.edu 1 Lecture #2- Intelligent Agents What is an intelligent? Agents and s Rationality PEAS (Performance measure, Environment, Actuators,
Artificial Intelligence ICS461 Fall 2010 Nancy E. Reed nreed@hawaii.edu 1 Lecture #2- Intelligent Agents What is an intelligent? Agents and s Rationality PEAS (Performance measure, Environment, Actuators,
Chapter 2: Intelligent Agents
 Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2 Intelligent Agents
 1 Chapter 2 Intelligent Agents CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Spring 2008 Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
1 Chapter 2 Intelligent Agents CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Spring 2008 Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
Introduction to Artificial Intelligence. Intelligent Agents
 Introduction to Artificial Intelligence Intelligent Agents Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Agents and environments PEAS (Performance,
Introduction to Artificial Intelligence Intelligent Agents Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Agents and environments PEAS (Performance,
Intelligent Agents. Chapter 2. Chapter 2 1
 Intelligent Agents Chapter 2 Chapter 2 1 Reminders Assignment 0 (lisp refresher) due 1/28 Lisp/emacs/AIMA tutorial: 11-1 today and Monday, 271 Soda Chapter 2 2 Outline Agents and environments Rationality
Intelligent Agents Chapter 2 Chapter 2 1 Reminders Assignment 0 (lisp refresher) due 1/28 Lisp/emacs/AIMA tutorial: 11-1 today and Monday, 271 Soda Chapter 2 2 Outline Agents and environments Rationality
Agents: Rationality (2)
") Agents: Intro Agent is entity that perceives and acts Perception occurs via sensors Percept is one unit of sensory input Percept sequence is complete history of agent s percepts In general, agent s actions
Agents: Intro Agent is entity that perceives and acts Perception occurs via sensors Percept is one unit of sensory input Percept sequence is complete history of agent s percepts In general, agent s actions
Introduction to Artificial Intelligence
 Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2014 http://www.ics.uci.edu/~kkask/fall-2014 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2014 http://www.ics.uci.edu/~kkask/fall-2014 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
Measuring the Performance of an Agent
 25 Measuring the Performance of an Agent The rational agent that we are aiming at should be successful in the task it is performing To assess the success we need to have a performance measure What is rational
25 Measuring the Performance of an Agent The rational agent that we are aiming at should be successful in the task it is performing To assess the success we need to have a performance measure What is rational
cs171 HW 1 - Solutions
 1. (Exercise 2.3 from RN) For each of the following assertions, say whether it is true or false and support your answer with examples or counterexamples where appropriate. (a) An agent that senses only
1. (Exercise 2.3 from RN) For each of the following assertions, say whether it is true or false and support your answer with examples or counterexamples where appropriate. (a) An agent that senses only
INTELLIGENT AGENTS 2.1 INTRODUCTION 2.2 HOW AGENTS SHOULD ACT
 2 INTELLIGENT AGENTS In which we discuss what an intelligent agent does,how it is related to its environment, how it is evaluated, and how we might go about building one. 2.1 INTRODUCTION An agent is anything
2 INTELLIGENT AGENTS In which we discuss what an intelligent agent does,how it is related to its environment, how it is evaluated, and how we might go about building one. 2.1 INTRODUCTION An agent is anything
A Review of Intelligent Agents
 A Review of Intelligent Agents K.Suganya 1 1 Associate Professor, Department of Software Engineering & IT(PG), A.V.C College of Engineering, Mayiladuthurai Email- ksuganya2002@yahoo.com ABSTRACT An intelligent
A Review of Intelligent Agents K.Suganya 1 1 Associate Professor, Department of Software Engineering & IT(PG), A.V.C College of Engineering, Mayiladuthurai Email- ksuganya2002@yahoo.com ABSTRACT An intelligent
What is Artificial Intelligence?
 CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. 1 What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. 1 What is AI? What is
Intelligent Agents. Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge
 Intelligent Agents Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge Denition of an Agent An agent is a computer system capable of autonomous action in some environment, in
Intelligent Agents Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge Denition of an Agent An agent is a computer system capable of autonomous action in some environment, in
Course Outline Department of Computing Science Faculty of Science. COMP 3710-3 Applied Artificial Intelligence (3,1,0) Fall 2015
 Fall 2015") Course Outline Department of Computing Science Faculty of Science COMP 710 - Applied Artificial Intelligence (,1,0) Fall 2015 Instructor: Office: Phone/Voice Mail: E-Mail: Course Description : Students
Course Outline Department of Computing Science Faculty of Science COMP 710 - Applied Artificial Intelligence (,1,0) Fall 2015 Instructor: Office: Phone/Voice Mail: E-Mail: Course Description : Students
Robot coined by Karel Capek in a 1921 science-fiction Czech play
 Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Robotics Robot coined by Karel Capek in a 1921 science-fiction Czech play Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices
Test Plan Evaluation Model
 Satisfice, Inc. http://www.satisfice.com James Bach, Principal james@satisfice.com Version 1.12 9/25/99 Test Plan Evaluation Model The answer to the question How good is this test plan? can only be given
Satisfice, Inc. http://www.satisfice.com James Bach, Principal james@satisfice.com Version 1.12 9/25/99 Test Plan Evaluation Model The answer to the question How good is this test plan? can only be given
Simulation-based traffic management for autonomous and connected vehicles
 Simulation-based traffic management for autonomous and connected vehicles Paweł Gora Faculty of Mathematics, Informatics and Mechanics University of Warsaw ITS Kraków, 3-4.12.2015 Axioms Vehicles may communicate
Simulation-based traffic management for autonomous and connected vehicles Paweł Gora Faculty of Mathematics, Informatics and Mechanics University of Warsaw ITS Kraków, 3-4.12.2015 Axioms Vehicles may communicate
Commentary Drive Assessment
 Commentary Drive Assessment Time start: Time finish: Candidate s Name: Candidate s Email: Date of Assessment: Location: Candidate s Supervisor: Supervisors Contact Number: Supervisors Email: Assessor s
Commentary Drive Assessment Time start: Time finish: Candidate s Name: Candidate s Email: Date of Assessment: Location: Candidate s Supervisor: Supervisors Contact Number: Supervisors Email: Assessor s
DRIVING AFTER STROKE STROKE FACT SHEET G
 STROKE FACT SHEET G DRIVING AFTER STROKE Introduction This fact sheet is designed to tell you how to go about returning to driving; the sort of car you may need and how to get it modified if necessary.
STROKE FACT SHEET G DRIVING AFTER STROKE Introduction This fact sheet is designed to tell you how to go about returning to driving; the sort of car you may need and how to get it modified if necessary.
CSC384 Intro to Artificial Intelligence
 CSC384 Intro to Artificial Intelligence What is Artificial Intelligence? What is Intelligence? Are these Intelligent? CSC384, University of Toronto 3 What is Intelligence? Webster says: The capacity to
CSC384 Intro to Artificial Intelligence What is Artificial Intelligence? What is Intelligence? Are these Intelligent? CSC384, University of Toronto 3 What is Intelligence? Webster says: The capacity to
Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill
 Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill Objectives: Analyze the operation of sequential logic circuits. Understand the operation of digital counters.
Digital Systems Based on Principles and Applications of Electrical Engineering/Rizzoni (McGraw Hill Objectives: Analyze the operation of sequential logic circuits. Understand the operation of digital counters.
Lesson 2 - Force, Friction
 Lesson 2 - Force, Friction Background Students learn about two types of friction static and kinetic and the equation that governs them. They also measure the coefficient of static friction and the coefficient
Lesson 2 - Force, Friction Background Students learn about two types of friction static and kinetic and the equation that governs them. They also measure the coefficient of static friction and the coefficient
Discrete Mathematics and Probability Theory Fall 2009 Satish Rao, David Tse Note 10
 CS 70 Discrete Mathematics and Probability Theory Fall 2009 Satish Rao, David Tse Note 10 Introduction to Discrete Probability Probability theory has its origins in gambling analyzing card games, dice,
CS 70 Discrete Mathematics and Probability Theory Fall 2009 Satish Rao, David Tse Note 10 Introduction to Discrete Probability Probability theory has its origins in gambling analyzing card games, dice,
GUIDE TO ERP IMPLEMENTATIONS: WHAT YOU NEED TO CONSIDER
 GUIDE TO ERP IMPLEMENTATIONS: WHAT YOU NEED TO CONSIDER INTRODUCTION You have decided that your business needs a change. It may be to keep up with your competition, to become more efficient and lower operational
GUIDE TO ERP IMPLEMENTATIONS: WHAT YOU NEED TO CONSIDER INTRODUCTION You have decided that your business needs a change. It may be to keep up with your competition, to become more efficient and lower operational
Proceedings of the 9th WSEAS International Conference on APPLIED COMPUTER SCIENCE
 Automated Futures Trading Environment Effect on the Decision Making PETR TUCNIK Department of Information Technologies University of Hradec Kralove Rokitanskeho 62, 500 02 Hradec Kralove CZECH REPUBLIC
Automated Futures Trading Environment Effect on the Decision Making PETR TUCNIK Department of Information Technologies University of Hradec Kralove Rokitanskeho 62, 500 02 Hradec Kralove CZECH REPUBLIC
Introduction to Robotics. Vikram Kapila, Associate Professor, Mechanical Engineering
 Introduction to Robotics Vikram Kapila, Associate Professor, Mechanical Engineering Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was
Introduction to Robotics Vikram Kapila, Associate Professor, Mechanical Engineering Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was
Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots
![Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots](/thumbs/27/11692183.jpg "Definitions. A [non-living] physical agent that performs tasks by manipulating the physical world. Categories of robots") Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Definitions A robot is A programmable, multifunction manipulator designed to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks.
Contents Intelligent Agents
 Contents 1 Intelligent Agents 3 1.1 Introduction................................. 3 1.2 What are agents?.............................. 4 1.2.1 Examples of Agents........................ 7 1.2.2 Intelligent
Contents 1 Intelligent Agents 3 1.1 Introduction................................. 3 1.2 What are agents?.............................. 4 1.2.1 Examples of Agents........................ 7 1.2.2 Intelligent
The fundamental question in economics is 2. Consumer Preferences
 A Theory of Consumer Behavior Preliminaries 1. Introduction The fundamental question in economics is 2. Consumer Preferences Given limited resources, how are goods and service allocated? 1 3. Indifference
A Theory of Consumer Behavior Preliminaries 1. Introduction The fundamental question in economics is 2. Consumer Preferences Given limited resources, how are goods and service allocated? 1 3. Indifference
MS INFORMATION SHEET DRIVING WITH MS. How can MS affect my ability to drive? Simultaneous coordination of arms and legs necessary when changing gears.
 MS INFORMATION SHEET DRIVING WITH MS How can MS affect my ability to drive? Driving a motor vehicle is a complex task, requiring perception, good judgement, responsiveness and reasonable physical capability.
MS INFORMATION SHEET DRIVING WITH MS How can MS affect my ability to drive? Driving a motor vehicle is a complex task, requiring perception, good judgement, responsiveness and reasonable physical capability.
6.099, Spring Semester, 2006 Assignment for Week 13 1
 6.099, Spring Semester, 2006 Assignment for Week 13 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Spring Semester, 2006
6.099, Spring Semester, 2006 Assignment for Week 13 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Spring Semester, 2006
Tutorial 1. Introduction to robot
 Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
Tutorial 1. Introduction to moway robot www.moway-robot.com 1 Index INTRODUCTION... 2 MOWAY ROBOT... 2 MOWAY PERSON COMPARISON... 6 HEARING SENSE EXAMPLE... 11 VISION EXAMPLE... 12 TOUCH SENSE EXAMPLE...
TomTom HAD story How TomTom enables Highly Automated Driving
 TomTom HAD story How TomTom enables Highly Automated Driving Automotive World Webinar 12 March 2015 Jan-Maarten de Vries VP Product Marketing TomTom Automotive Automated driving is real and it is big Image:
TomTom HAD story How TomTom enables Highly Automated Driving Automotive World Webinar 12 March 2015 Jan-Maarten de Vries VP Product Marketing TomTom Automotive Automated driving is real and it is big Image:
360 feedback. Manager. Development Report. Sample Example. name: email: date: sample@example.com
 60 feedback Manager Development Report name: email: date: Sample Example sample@example.com 9 January 200 Introduction 60 feedback enables you to get a clear view of how others perceive the way you work.
60 feedback Manager Development Report name: email: date: Sample Example sample@example.com 9 January 200 Introduction 60 feedback enables you to get a clear view of how others perceive the way you work.
What Is an Electric Motor? How Does a Rotation Sensor Work?
 What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
Hybrid System for Driver Assistance
 International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 15 (2014), pp. 1583-1587 International Research Publications House http://www. irphouse.com Hybrid System
International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 15 (2014), pp. 1583-1587 International Research Publications House http://www. irphouse.com Hybrid System
CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation. Prof. Dr. Hani Hagras
 1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
CAs and Turing Machines. The Basis for Universal Computation
 CAs and Turing Machines The Basis for Universal Computation What We Mean By Universal When we claim universal computation we mean that the CA is capable of calculating anything that could possibly be calculated*.
CAs and Turing Machines The Basis for Universal Computation What We Mean By Universal When we claim universal computation we mean that the CA is capable of calculating anything that could possibly be calculated*.
Designing Behavior-Based Systems
 Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
Designing Behavior-Based Systems Objectives Use schema theory to design and program behaviors Design a complete behavioral system Understand how to develop a behavioral table for behaviors Understand how
OPERATOR S MANUAL WARNING
 ELECTRIC PALLET TRUCK E30 SERIES OPERATOR S MANUAL WARNING DO NOT INSTALL, OPERATE OR SERVICE THIS PRODUCT UNLESS YOU HAVE READ AND FULLY UNDERSTAND THE ENTIRE CONTENTS OF THIS MANUAL. FAILURE TO DO SO
ELECTRIC PALLET TRUCK E30 SERIES OPERATOR S MANUAL WARNING DO NOT INSTALL, OPERATE OR SERVICE THIS PRODUCT UNLESS YOU HAVE READ AND FULLY UNDERSTAND THE ENTIRE CONTENTS OF THIS MANUAL. FAILURE TO DO SO
Manufacturing Analytics: Uncovering Secrets on Your Factory Floor
 SIGHT MACHINE WHITE PAPER Manufacturing Analytics: Uncovering Secrets on Your Factory Floor Quick Take For manufacturers, operational insight is often masked by mountains of process and part data flowing
SIGHT MACHINE WHITE PAPER Manufacturing Analytics: Uncovering Secrets on Your Factory Floor Quick Take For manufacturers, operational insight is often masked by mountains of process and part data flowing
CIM Computer Integrated Manufacturing
 INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
INDEX CIM IN BASIC CONFIGURATION CIM IN ADVANCED CONFIGURATION CIM IN COMPLETE CONFIGURATION DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Computer Integrated Manufacturing (CIM) is a method of
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration
Quality Meets the CEO
 Quality Meets the CEO Jeffery E. Payne jepayn@rstcorp.com Reliable Software Technologies Corporate management does not care about quality. This is the cold, hard reality of the software world. Management
Quality Meets the CEO Jeffery E. Payne jepayn@rstcorp.com Reliable Software Technologies Corporate management does not care about quality. This is the cold, hard reality of the software world. Management
Safe Street Crossing is the first class we offer addressing road safety and transportation choices. 2nd grade: Pedestrian Safety Unit
 2nd Grade: Pedestrian Safety Unit Safe Street Crossing is the first class we offer addressing road safety and transportation choices. 2nd grade: Pedestrian Safety Unit 4th grade: Three-part Bicycle Safety
2nd Grade: Pedestrian Safety Unit Safe Street Crossing is the first class we offer addressing road safety and transportation choices. 2nd grade: Pedestrian Safety Unit 4th grade: Three-part Bicycle Safety
Truck Automation for the Ready Mixed Concrete Industry. Michael J. Hoagland (205) 879-3282 ext. 1164 mhoagland@commandalkon.com
 879-3282 ext. 1164 mhoagland@commandalkon.com") Truck Automation for the Ready Mixed Concrete Industry Michael J. Hoagland (205) 879-3282 ext. 1164 mhoagland@commandalkon.com Session Agenda What is GPS and How does it work? Auto Signaling Explained
Truck Automation for the Ready Mixed Concrete Industry Michael J. Hoagland (205) 879-3282 ext. 1164 mhoagland@commandalkon.com Session Agenda What is GPS and How does it work? Auto Signaling Explained
LEGO ROBOTICS for YOUNG BEGINNERS
 LEGO ROBOTICS for YOUNG BEGINNERS A LEGOLAND California Educational Resource Guide Grades 1-3 Table of Contents Welcome Page 1 Background Information Page 2 Discovery and Learning: Simple Machines and
LEGO ROBOTICS for YOUNG BEGINNERS A LEGOLAND California Educational Resource Guide Grades 1-3 Table of Contents Welcome Page 1 Background Information Page 2 Discovery and Learning: Simple Machines and
Getting the best from your 360 degree feedback
 1 Contents Getting the best from your 360 degree feedback... 3 What it is.... 3 And isn t.... 4 Using the system... 5 Choosing your respondents... 5 Choosing your competencies... 5 Compiling your questionnaire...
1 Contents Getting the best from your 360 degree feedback... 3 What it is.... 3 And isn t.... 4 Using the system... 5 Choosing your respondents... 5 Choosing your competencies... 5 Compiling your questionnaire...
GEARBOX MONITOR MODEL NR. 1.1203 USER MANUAL
 GEARBOX MONITOR MODEL NR. 1.1203 USER MANUAL USER SAFETY Before starting to drive with a mounted gearbox monitor you need to make sure that: the monitor does not limit field of vision of the driver; monitor
GEARBOX MONITOR MODEL NR. 1.1203 USER MANUAL USER SAFETY Before starting to drive with a mounted gearbox monitor you need to make sure that: the monitor does not limit field of vision of the driver; monitor
2013 International Symposium on Green Manufacturing and Applications Honolulu, Hawaii
 Green Robotics, Automation, and Machine Intelligence; a new Engineering Course in Sustainable Design Joseph T. Wunderlich, PhD College, PA, USA 2013 International Symposium on Green Manufacturing and Applications
Green Robotics, Automation, and Machine Intelligence; a new Engineering Course in Sustainable Design Joseph T. Wunderlich, PhD College, PA, USA 2013 International Symposium on Green Manufacturing and Applications
Ten steps to better requirements management.
 White paper June 2009 Ten steps to better requirements management. Dominic Tavassoli, IBM Actionable enterprise architecture management Page 2 Contents 2 Introduction 2 Defining a good requirement 3 Ten
White paper June 2009 Ten steps to better requirements management. Dominic Tavassoli, IBM Actionable enterprise architecture management Page 2 Contents 2 Introduction 2 Defining a good requirement 3 Ten
2/26/2008. Sensors For Robotics. What is sensing? Why do robots need sensors? What is the angle of my arm? internal information
 Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Sensors For Robotics What makes a machine a robot? Sensing Planning Acting information about the environment action on the environment where is the truck? What is sensing? Sensing is converting a quantity
Outline Intrusion Detection CS 239 Security for Networks and System Software June 3, 2002
 Outline Intrusion Detection CS 239 Security for Networks and System Software June 3, 2002 Introduction Characteristics of intrusion detection systems Some sample intrusion detection systems Page 1 Page
Outline Intrusion Detection CS 239 Security for Networks and System Software June 3, 2002 Introduction Characteristics of intrusion detection systems Some sample intrusion detection systems Page 1 Page
AI: A Modern Approach, Chpts. 3-4 Russell and Norvig
 AI: A Modern Approach, Chpts. 3-4 Russell and Norvig Sequential Decision Making in Robotics CS 599 Geoffrey Hollinger and Gaurav Sukhatme (Some slide content from Stuart Russell and HweeTou Ng) Spring,
AI: A Modern Approach, Chpts. 3-4 Russell and Norvig Sequential Decision Making in Robotics CS 599 Geoffrey Hollinger and Gaurav Sukhatme (Some slide content from Stuart Russell and HweeTou Ng) Spring,
Texas Virtual Driver Education Course Syllabus
 Texas Virtual Driver Education Course Syllabus By Amarillo Independent School District INTRODUCTION: 46:04 Welcome/Tutorial 5 minutes Virtual Drive Notice 1 minute Audio/Computer Requirements 3 minutes
Texas Virtual Driver Education Course Syllabus By Amarillo Independent School District INTRODUCTION: 46:04 Welcome/Tutorial 5 minutes Virtual Drive Notice 1 minute Audio/Computer Requirements 3 minutes
Applying Deep Learning to Car Data Logging (CDL) and Driver Assessor (DA) October 22-Oct-15
 and Driver Assessor (DA) October 22-Oct-15") Applying Deep Learning to Car Data Logging (CDL) and Driver Assessor (DA) October 22-Oct-15 GENIVI is a registered trademark of the GENIVI Alliance in the USA and other countries Copyright GENIVI Alliance
Applying Deep Learning to Car Data Logging (CDL) and Driver Assessor (DA) October 22-Oct-15 GENIVI is a registered trademark of the GENIVI Alliance in the USA and other countries Copyright GENIVI Alliance
Inclined Plane: Distance vs. Force
 1a Inclined Plane: Distance vs. Force Look at the inclined plane model you built for Card 2. It s a ramp, so it s easy to slide or roll things up and down it. As you noticed, it is a little more difficult
1a Inclined Plane: Distance vs. Force Look at the inclined plane model you built for Card 2. It s a ramp, so it s easy to slide or roll things up and down it. As you noticed, it is a little more difficult
The Basics of Robot Mazes Teacher Notes
 The Basics of Robot Mazes Teacher Notes Why do robots solve Mazes? A maze is a simple environment with simple rules. Solving it is a task that beginners can do successfully while learning the essentials
The Basics of Robot Mazes Teacher Notes Why do robots solve Mazes? A maze is a simple environment with simple rules. Solving it is a task that beginners can do successfully while learning the essentials
Financial services marketers: Are your sales aids actually aiding sales?
 Financial services marketers: Are your sales aids actually aiding sales? Here s the deal The consumer is as sophisticated as they ve ever been. Financial products are as sophisticated as they ve ever been.
Financial services marketers: Are your sales aids actually aiding sales? Here s the deal The consumer is as sophisticated as they ve ever been. Financial products are as sophisticated as they ve ever been.
Problem-Based Group Activities for a Sensation & Perception Course. David S. Kreiner. University of Central Missouri
 -Based Group Activities for a Course David S. Kreiner University of Central Missouri Author contact information: David Kreiner Professor of Psychology University of Central Missouri Lovinger 1111 Warrensburg
-Based Group Activities for a Course David S. Kreiner University of Central Missouri Author contact information: David Kreiner Professor of Psychology University of Central Missouri Lovinger 1111 Warrensburg
GOAL: Get a Drivers License
 GOAL: Get a Drivers License Contributed by Tammera Gist, National City Public Library Overview Having a drivers license allows you to legally drive in the United States. A drivers license means you can
GOAL: Get a Drivers License Contributed by Tammera Gist, National City Public Library Overview Having a drivers license allows you to legally drive in the United States. A drivers license means you can
BACKING UP PROCEDURES FOR SCHOOL BUS DRIVERS
 LEADER S GUIDE 2498-LDG-E BACKING UP PROCEDURES FOR SCHOOL BUS DRIVERS Quality Safety and Health Products, for Today...and Tomorrow Introduction This video is designed to demonstrate backing up training
LEADER S GUIDE 2498-LDG-E BACKING UP PROCEDURES FOR SCHOOL BUS DRIVERS Quality Safety and Health Products, for Today...and Tomorrow Introduction This video is designed to demonstrate backing up training
GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM
 Advances in Production Engineering & Management 4 (2009) 4, 255-262 ISSN 1854-6250 Technical paper GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM Ata, A., A.*; Elaryan, M.**; Gemaee, M.**;
Advances in Production Engineering & Management 4 (2009) 4, 255-262 ISSN 1854-6250 Technical paper GANTRY ROBOTIC CELL FOR AUTOMATIC STORAGE AND RETREIVAL SYSTEM Ata, A., A.*; Elaryan, M.**; Gemaee, M.**;
Introduction CHAPTER 1
 CHAPTER 1 Introduction Ever since the development of the first integrated circuits in the late 1950s the complexity of such devices doubled every 20 months. A development which has been anticipated by
CHAPTER 1 Introduction Ever since the development of the first integrated circuits in the late 1950s the complexity of such devices doubled every 20 months. A development which has been anticipated by
Advantages and Disadvantages of One Way Streets October 30, 2007
 Advantages and Disadvantages of One Way Streets October 30, 2007 0 P age Background As the revitalization of the Central Waterfront area moves forward, one issue that might need closer analysis is the
Advantages and Disadvantages of One Way Streets October 30, 2007 0 P age Background As the revitalization of the Central Waterfront area moves forward, one issue that might need closer analysis is the
Formalizing Properties of Agents
 Formalizing Properties of Agents Richard Goodwin May 1993 CMU-CS-93-159 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract There is a wide gulf between the formal logics
Formalizing Properties of Agents Richard Goodwin May 1993 CMU-CS-93-159 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract There is a wide gulf between the formal logics
English as a Second Language Podcast www.eslpod.com. ESL Podcast 164 Seeing a Specialist
 GLOSSARY nagging pain a pain that continues to hurt and that won t go away * I can t sleep at night because of the nagging pain in my back. routine tests regular tests, not special ones * The doctor ordered
GLOSSARY nagging pain a pain that continues to hurt and that won t go away * I can t sleep at night because of the nagging pain in my back. routine tests regular tests, not special ones * The doctor ordered
Introduction to Electronic Signals
 Introduction to Electronic Signals Oscilloscope An oscilloscope displays voltage changes over time. Use an oscilloscope to view analog and digital signals when required during circuit diagnosis. Fig. 6-01
Introduction to Electronic Signals Oscilloscope An oscilloscope displays voltage changes over time. Use an oscilloscope to view analog and digital signals when required during circuit diagnosis. Fig. 6-01
what operations can it perform? how does it perform them? on what kind of data? where are instructions and data stored?
 Inside the CPU how does the CPU work? what operations can it perform? how does it perform them? on what kind of data? where are instructions and data stored? some short, boring programs to illustrate the
Inside the CPU how does the CPU work? what operations can it perform? how does it perform them? on what kind of data? where are instructions and data stored? some short, boring programs to illustrate the
Toyota Prius Hybrid Display System Usability Test Report
 Toyota Prius Hybrid Display System Usability Test Report Sample Test Script Author Shobana Subramanian Usability Test Script/ Protocol for Novice User 2 Participant tasks Observation & Checklist Initial
Toyota Prius Hybrid Display System Usability Test Report Sample Test Script Author Shobana Subramanian Usability Test Script/ Protocol for Novice User 2 Participant tasks Observation & Checklist Initial
for the Bill Hanlon bill@hanlonmath.com
 Strategies for Learning the Math Facts Bill Hanlon bill@hanlonmath.com The more sophisticated mental operations in mathematics of analysis, synthesis, and evaluation are impossible without rapid and accurate
Strategies for Learning the Math Facts Bill Hanlon bill@hanlonmath.com The more sophisticated mental operations in mathematics of analysis, synthesis, and evaluation are impossible without rapid and accurate
Adaptive Cruise Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 01 June 2016 ISSN (online): 2349-6010 Adaptive Cruise Control Prof. D. S. Vidhya Assistant Professor Miss Cecilia
IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 01 June 2016 ISSN (online): 2349-6010 Adaptive Cruise Control Prof. D. S. Vidhya Assistant Professor Miss Cecilia
Johari Window. Lesson Plan
 xxx Lesson 12 Johari Window Overview: This optional lesson provides a look into how we view ourselves and how others view us. It is also a model for opening up the lines of communication with others. It
xxx Lesson 12 Johari Window Overview: This optional lesson provides a look into how we view ourselves and how others view us. It is also a model for opening up the lines of communication with others. It
Understanding Types of Assessment Within an RTI Framework
 Understanding Types of Assessment Within an RTI Framework Slide 1: Welcome to the webinar Understanding Types of Assessment Within an RTI Framework. This is one of 11 webinars that we have developed at
Understanding Types of Assessment Within an RTI Framework Slide 1: Welcome to the webinar Understanding Types of Assessment Within an RTI Framework. This is one of 11 webinars that we have developed at
6. MEASURING EFFECTS OVERVIEW CHOOSE APPROPRIATE METRICS
 45 6. MEASURING EFFECTS OVERVIEW In Section 4, we provided an overview of how to select metrics for monitoring implementation progress. This section provides additional detail on metric selection and offers
45 6. MEASURING EFFECTS OVERVIEW In Section 4, we provided an overview of how to select metrics for monitoring implementation progress. This section provides additional detail on metric selection and offers
The Trend Toward Convergence of Physical and Logical (Cyber) Security
 Security") The Trend Toward Convergence of Physical and Logical (Cyber) Security Fred S. Roberts Director Command, Control, and Interoperability Center for Advanced Data Analysis (CCICADA)* Rutgers University *A
The Trend Toward Convergence of Physical and Logical (Cyber) Security Fred S. Roberts Director Command, Control, and Interoperability Center for Advanced Data Analysis (CCICADA)* Rutgers University *A
EB Automotive Driver Assistance EB Assist Solutions. Damian Barnett Director Automotive Software June 5, 2015
 EB Automotive Driver Assistance EB Assist Solutions Damian Barnett Director Automotive Software June 5, 2015 Advanced driver assistance systems Market growth The Growth of ADAS is predicted to be about
EB Automotive Driver Assistance EB Assist Solutions Damian Barnett Director Automotive Software June 5, 2015 Advanced driver assistance systems Market growth The Growth of ADAS is predicted to be about
Smart features like these are why Ford F-Series has been America s best-selling truck for 37 years and America s best-selling vehicle for 32 years
 Sep 24, 2014 Dearborn, Mich. 10 Awesome Driver-Assist Features That Help 2015 Ford F-150 Customers Drive Smarter The all-new Ford F-150, the smartest F-150 yet, is available with the following class-exclusive
Sep 24, 2014 Dearborn, Mich. 10 Awesome Driver-Assist Features That Help 2015 Ford F-150 Customers Drive Smarter The all-new Ford F-150, the smartest F-150 yet, is available with the following class-exclusive
EMPOWERING YOURSELF AS A COMMITTEE MEMBER
 1 EMPOWERING YOURSELF AS A COMMITTEE MEMBER Bernice R. Sandler Senior Scholar Women s Research and Education Institute www.bernicesandler.com 202 833-3331 On virtually all campuses, committees are the
1 EMPOWERING YOURSELF AS A COMMITTEE MEMBER Bernice R. Sandler Senior Scholar Women s Research and Education Institute www.bernicesandler.com 202 833-3331 On virtually all campuses, committees are the
ScottishPower Competency Based Recruitment Competency Guidelines External Candidate. pp077682 ScottishPower [Pick the date]
![ScottishPower Competency Based Recruitment Competency Guidelines External Candidate. pp077682 ScottishPower [Pick the date]](/thumbs/40/21430508.jpg "ScottishPower Competency Based Recruitment Competency Guidelines External Candidate. pp077682 ScottishPower [Pick the date]") ScottishPower Competency Based Recruitment Competency Guidelines External Candidate pp077682 ScottishPower [Pick the date] Aims and Objectives This document will give you an overview of the selection process
ScottishPower Competency Based Recruitment Competency Guidelines External Candidate pp077682 ScottishPower [Pick the date] Aims and Objectives This document will give you an overview of the selection process
Formal Verification and Linear-time Model Checking
 Formal Verification and Linear-time Model Checking Paul Jackson University of Edinburgh Automated Reasoning 21st and 24th October 2013 Why Automated Reasoning? Intellectually stimulating and challenging
Formal Verification and Linear-time Model Checking Paul Jackson University of Edinburgh Automated Reasoning 21st and 24th October 2013 Why Automated Reasoning? Intellectually stimulating and challenging
Descartes Meditations. ? God exists I exist (as a thinking thing)
") Descartes Meditations Descartes Structure of Belief What does he know with absolute certainty?? God exists I exist (as a thinking thing) Why try to prove God exists? Intellectual interest. : Are any of
Descartes Meditations Descartes Structure of Belief What does he know with absolute certainty?? God exists I exist (as a thinking thing) Why try to prove God exists? Intellectual interest. : Are any of
Easy Casino Profits. Congratulations!!
 Easy Casino Profits The Easy Way To Beat The Online Casinos Everytime! www.easycasinoprofits.com Disclaimer The authors of this ebook do not promote illegal, underage gambling or gambling to those living
Easy Casino Profits The Easy Way To Beat The Online Casinos Everytime! www.easycasinoprofits.com Disclaimer The authors of this ebook do not promote illegal, underage gambling or gambling to those living
Three Theories of Individual Behavioral Decision-Making
 Three Theories of Individual Decision-Making Be precise and explicit about what you want to understand. It is critical to successful research that you are very explicit and precise about the general class
Three Theories of Individual Decision-Making Be precise and explicit about what you want to understand. It is critical to successful research that you are very explicit and precise about the general class
Decision Making under Uncertainty
 6.825 Techniques in Artificial Intelligence Decision Making under Uncertainty How to make one decision in the face of uncertainty Lecture 19 1 In the next two lectures, we ll look at the question of how
6.825 Techniques in Artificial Intelligence Decision Making under Uncertainty How to make one decision in the face of uncertainty Lecture 19 1 In the next two lectures, we ll look at the question of how
COMP 590: Artificial Intelligence
 COMP 590: Artificial Intelligence Today Course overview What is AI? Examples of AI today Who is this course for? An introductory survey of AI techniques for students who have not previously had an exposure
COMP 590: Artificial Intelligence Today Course overview What is AI? Examples of AI today Who is this course for? An introductory survey of AI techniques for students who have not previously had an exposure
STEAM STUDENT SET: INVENTION LOG
 STEAM STUDENT SET: INVENTION LOG Name: What challenge are you working on? In a sentence or two, describe the challenge you will be working on. 1. CREATE Explore new ideas and bring them to life. You can
STEAM STUDENT SET: INVENTION LOG Name: What challenge are you working on? In a sentence or two, describe the challenge you will be working on. 1. CREATE Explore new ideas and bring them to life. You can
By: M.Habibullah Pagarkar Kaushal Parekh Jogen Shah Jignasa Desai Prarthna Advani Siddhesh Sarvankar Nikhil Ghate
 AUTOMATED VEHICLE CONTROL SYSTEM By: M.Habibullah Pagarkar Kaushal Parekh Jogen Shah Jignasa Desai Prarthna Advani Siddhesh Sarvankar Nikhil Ghate Third Year Information Technology Engineering V.E.S.I.T.
AUTOMATED VEHICLE CONTROL SYSTEM By: M.Habibullah Pagarkar Kaushal Parekh Jogen Shah Jignasa Desai Prarthna Advani Siddhesh Sarvankar Nikhil Ghate Third Year Information Technology Engineering V.E.S.I.T.
Lectric Enterprises 5905 Sprucepine Drive Winston Salem, NC. 27105 Telephone 336-655-4801 e-mail: ivirscar@knight-f2k4.com
 KNIGHT RIDER DASH ELECTRONICS PILOT\SEASON 2-2 TV DASH INSTALLATION INSTRUCTION MANUAL Bezel Overlay Voice Box Instructions Relay connection for a dash startup delay. Connect to the +12v side of relay
KNIGHT RIDER DASH ELECTRONICS PILOT\SEASON 2-2 TV DASH INSTALLATION INSTRUCTION MANUAL Bezel Overlay Voice Box Instructions Relay connection for a dash startup delay. Connect to the +12v side of relay
Intelligent Flexible Automation
 Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
Intelligent Flexible Automation David Peters Chief Executive Officer Universal Robotics February 20-22, 2013 Orlando World Marriott Center Orlando, Florida USA Trends in AI and Computing Power Convergence
III. Applications of Force and Motion Concepts. Concept Review. Conflicting Contentions. 1. Airplane Drop 2. Moving Ball Toss 3. Galileo s Argument
 III. Applications of Force and Motion Concepts Concept Review Conflicting Contentions 1. Airplane Drop 2. Moving Ball Toss 3. Galileo s Argument Qualitative Reasoning 1. Dropping Balls 2. Spinning Bug
III. Applications of Force and Motion Concepts Concept Review Conflicting Contentions 1. Airplane Drop 2. Moving Ball Toss 3. Galileo s Argument Qualitative Reasoning 1. Dropping Balls 2. Spinning Bug
What is Artificial Intelligence (AI)?
?") 6.825 Techniques in Artificial Intelligence What is Artificial Intelligence (AI)? Lecture 1 1 If you're going to teach or take an AI course, it's useful to ask: "What's AI?" It's a lot of different things
6.825 Techniques in Artificial Intelligence What is Artificial Intelligence (AI)? Lecture 1 1 If you're going to teach or take an AI course, it's useful to ask: "What's AI?" It's a lot of different things
Acting humanly: The Turing test. Artificial Intelligence. Thinking humanly: Cognitive Science. Outline. What is AI?
 Acting humanly: The Turing test Artificial Intelligence Turing (1950) Computing machinery and intelligence : Can machines think? Can machines behave intelligently? Operational test for intelligent behavior:
Acting humanly: The Turing test Artificial Intelligence Turing (1950) Computing machinery and intelligence : Can machines think? Can machines behave intelligently? Operational test for intelligent behavior:
REPUTATION MANAGEMENT SURVIVAL GUIDE. A BEGINNER S GUIDE for managing your online reputation to promote your local business.
 REPUTATION MANAGEMENT SURVIVAL GUIDE A BEGINNER S GUIDE for managing your online reputation to promote your local business. About Main Street Hub: Main Street Hub is the voice for more local businesses
REPUTATION MANAGEMENT SURVIVAL GUIDE A BEGINNER S GUIDE for managing your online reputation to promote your local business. About Main Street Hub: Main Street Hub is the voice for more local businesses
Tips and Technology For Bosch Partners
 Tips and Technology For Bosch Partners Current information for the successful workshop No. 04/2015 Electrics / Elektronics Driver Assistance Systems In this issue, we are continuing our series on automated
Tips and Technology For Bosch Partners Current information for the successful workshop No. 04/2015 Electrics / Elektronics Driver Assistance Systems In this issue, we are continuing our series on automated
Photoillustration: Harold A. Perry; photos: Jupiter Images
 Photoillustration: Harold A. Perry; photos: Jupiter Images 40 December 2008 WIRING DIAGRAM COLOR- CODING: More Than Meets the Eye BY JORGE MENCHU One of your earliest childhood memories may be a remonstration
Photoillustration: Harold A. Perry; photos: Jupiter Images 40 December 2008 WIRING DIAGRAM COLOR- CODING: More Than Meets the Eye BY JORGE MENCHU One of your earliest childhood memories may be a remonstration
Arkansas State PIRC/ Center for Effective Parenting
 Increasing Your Child s Motivation to Learn In order to be successful in school and to learn, students must stay involved in the learning process. This requires students to do many different activities
Increasing Your Child s Motivation to Learn In order to be successful in school and to learn, students must stay involved in the learning process. This requires students to do many different activities
PID Control. Proportional Integral Derivative (PID) Control. Matrix Multimedia 2011 MX009 - PID Control. by Ben Rowland, April 2011
 Control. Matrix Multimedia 2011 MX009 - PID Control. by Ben Rowland, April 2011") PID Control by Ben Rowland, April 2011 Abstract PID control is used extensively in industry to control machinery and maintain working environments etc. The fundamentals of PID control are fairly straightforward
PID Control by Ben Rowland, April 2011 Abstract PID control is used extensively in industry to control machinery and maintain working environments etc. The fundamentals of PID control are fairly straightforward
Chapter 2 The Research on Fault Diagnosis of Building Electrical System Based on RBF Neural Network
 Chapter 2 The Research on Fault Diagnosis of Building Electrical System Based on RBF Neural Network Qian Wu, Yahui Wang, Long Zhang and Li Shen Abstract Building electrical system fault diagnosis is the
Chapter 2 The Research on Fault Diagnosis of Building Electrical System Based on RBF Neural Network Qian Wu, Yahui Wang, Long Zhang and Li Shen Abstract Building electrical system fault diagnosis is the
AIBO as an Intelligent Robot Watchdog
 Master Thesis report AIBO as an Intelligent Robot Watchdog Unknown human INTRUDER DETECTED!! ALARM! Human... Bou Tsing Hau Delft, December 2006 Man-Machine Interaction Group Faculty of Electrical Engineering,
Master Thesis report AIBO as an Intelligent Robot Watchdog Unknown human INTRUDER DETECTED!! ALARM! Human... Bou Tsing Hau Delft, December 2006 Man-Machine Interaction Group Faculty of Electrical Engineering,