Kinect & 3D. Tamara Berg Advanced Mul7media
|
|
|
- Melvyn Young
- 7 years ago
- Views:
Transcription
1 Kinect & 3D Tamara Berg Advanced Mul7media

2 Recovering 3D from Images How can we automa7cally compute 3D geometry from images? What cues in the image provide 3D informa7on? Slide credit: S. Narasimhan

3 Visual Cues for 3D Shading Merle Norman Cosme-cs, Los Angeles Slide credit: S. Narasimhan

4 Visual Cues for 3D Shading Texture The Visual Cliff, by William Vandivert, 1960 Slide credit: S. Narasimhan

5 Visual Cues for 3D Shading Texture Focus From The Art of Photography, Canon Slide credit: S. Narasimhan

6 Visual Cues for 3D Shading Texture Focus Mo7on Slide credit: S. Narasimhan

7 Why do we have two eyes? Cyclope vs. Odysseus Slide credit: S. Narasimhan

8 Stereo Reconstruc7on The Stereo Problem Shape from two (or more) images Biological mo7va7on Slide credit: S. Narasimhan

9 Mul7- view stereo Slide credit: S. Seitz & S Lazebnik

10 What is stereo vision? Generic problem formula7on: given several images of the same object or scene, compute a representa7on of its 3D shape Slide credit: S. Seitz & S Lazebnik

11 What is stereo vision? Generic problem formula7on: given several images of the same object or scene, compute a representa7on of its 3D shape Images of the same object or scene Arbitrary number of images (from two to thousands) Arbitrary camera posi7ons (camera network or video sequence) Calibra7on may be ini7ally unknown Representa7on of 3D shape Depth maps Meshes Point clouds Patch clouds Volumetric models Layered models Slide credit: S. Seitz & S Lazebnik
 Calibra7on may be ini7ally unknown Representa7on of 3D shape Depth maps")
12 Binocular Stereo Slide credit: S. Narasimhan

13 Binocular Stereo Basic Principle: Triangula7on Gives reconstruc7on as intersec7on of two rays Requires calibra7on point correspondence Slide credit: S. Narasimhan

14 Stereo Corresondence
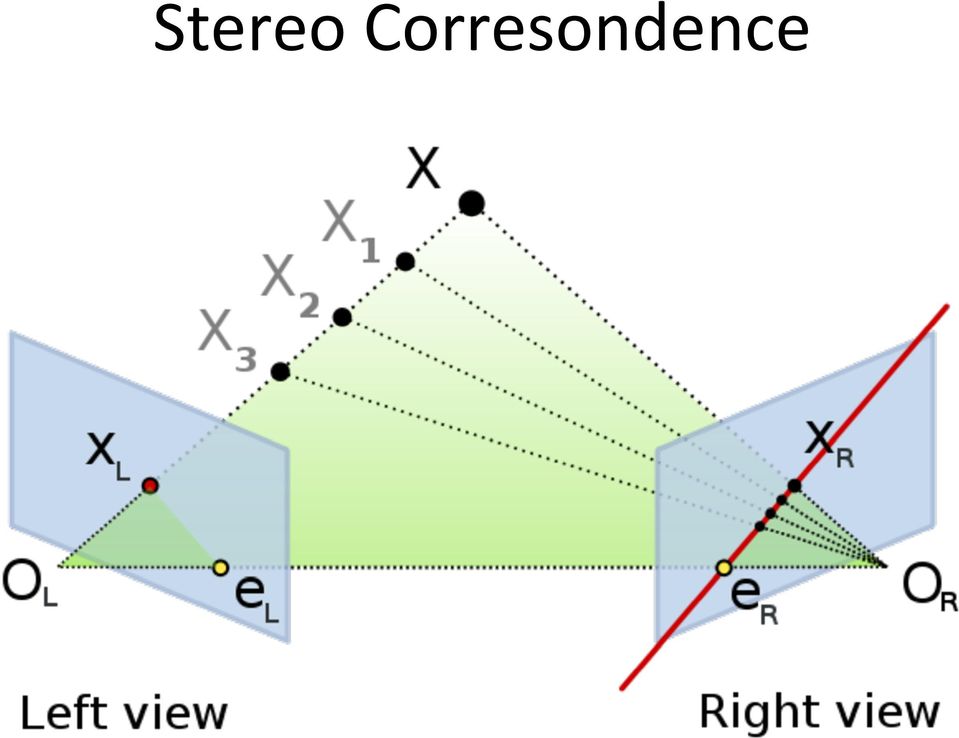
15 Stereo Correspondence Determine Pixel Correspondence Pairs of points that correspond to same scene point Epipolar Constraint Reduces correspondence problem to 1D search along conjugate epipolar lines Java demo: h_p:// Slide credit: S. Narasimhan

16 Basic Stereo Algorithm For each epipolar line For each pixel in the leb image compare with every pixel on same epipolar line in right image pick pixel with minimum match cost Improvement: match windows This should look familar... Correla7on, Sum of Squared Difference (SSD), etc. Slide credit: S. Narasimhan
, etc. Slide credit: S.")
17 Size of Matching window W = 3 W = 20 Effect of window size Smaller window Good/bad? Larger window Good/bad? Be_er results with adap1ve window T. Kanade and M. Okutomi, A Stereo Matching Algorithm with an Adap1ve Window: Theory and Experiment,, Proc. Interna7onal Conference on Robo7cs and Automa7on, D. Scharstein and R. Szeliski. Stereo matching with nonlinear diffusion. Interna7onal Journal of Computer Vision, 28(2): , July 1998 Slide credit: S. Narasimhan

18 Stereo Results Data from University of Tsukuba Scene Ground truth Slide credit: S. Narasimhan

19 Results with Window Search Window- based matching (best window size) Ground truth Slide credit: S. Narasimhan

20 From feature matching to dense stereo 1. Extract features 2. Get a sparse set of ini7al matches 3. Itera7vely expand matches to nearby loca7ons 4. Use visibility constraints to filter out false matches 5. Perform surface reconstruc7on Yasutaka Furukawa and Jean Ponce, Accurate, Dense, and Robust Mul-- View Stereopsis, CVPR Slide credit: S. Seitz & S Lazebnik

21 Stereo from community photo collec7ons For photos taken from the Internet, we need structure from mo1on techniques to reconstruct both camera posi7ons and 3D points Slide credit: S. Seitz & S Lazebnik
22 Stereo from community photo collec7ons M. Goesele, N. Snavely, B. Curless, H. Hoppe, S. Seitz, Mul7- View Stereo for Community Photo Collec7ons, ICCV 2007 h_p://grail.cs.washington.edu/projects/mvscpc/ Slide credit: S. Seitz & S Lazebnik
23 What about the kinect?
24 Basic Stereo Algorithm What s the hard part? Slide credit: S. Narasimhan
25 Active stereo with structured light Let s make correspondence easy!! L. Zhang, B. Curless, and S. M. Seitz. Rapid Shape Acquisi7on Using Color Structured Light and Mul7- pass Dynamic Programming. 3DPVT 2002 Slide credit: S. Seitz
26 Active stereo with structured light Project structured light patterns onto the object Simplifies the correspondence problem Allows us to use only one camera Instead of 2 cameras, use camera + projector camera projector L. Zhang, B. Curless, and S. M. Seitz. Rapid Shape Acquisi7on Using Color Structured Light and Mul7- pass Dynamic Programming. 3DPVT 2002 Slide credit: S. Seitz
27 Active stereo with structured light Project structured light patterns onto the object Simplifies the correspondence problem Allows us to use only one camera camera projector L. Zhang, B. Curless, and S. M. Seitz. Rapid Shape Acquisi7on Using Color Structured Light and Mul7- pass Dynamic Programming. 3DPVT 2002 Slide credit: S. Seitz
28 Active stereo with structured light L. Zhang, B. Curless, and S. M. Seitz. Rapid Shape Acquisi7on Using Color Structured Light and Mul7- pass Dynamic Programming. 3DPVT 2002 Slide credit: S. Seitz
29 Kinect in ac7on
30 Depth Maps
31 What about people?
32 Recovering skeletons
33 How?
34 Training Data - Capture a large database of mo7on capture (mocap) of human ac7ons. - Retarget mocap to meshes spanning the range of body shapes and sizes - Render depth and body part images
35 Classify based on depth features
36 Test Results
37 Kinect in ac7on
38 Kool Apps Kinect for recogni7on Kinectbot
Announcements. Active stereo with structured light. Project structured light patterns onto the object
 Announcements Active stereo with structured light Project 3 extension: Wednesday at noon Final project proposal extension: Friday at noon > consult with Steve, Rick, and/or Ian now! Project 2 artifact
Announcements Active stereo with structured light Project 3 extension: Wednesday at noon Final project proposal extension: Friday at noon > consult with Steve, Rick, and/or Ian now! Project 2 artifact
How does the Kinect work? John MacCormick
 How does the Kinect work? John MacCormick Xbox demo Laptop demo The Kinect uses structured light and machine learning Inferring body position is a two-stage process: first compute a depth map (using structured
How does the Kinect work? John MacCormick Xbox demo Laptop demo The Kinect uses structured light and machine learning Inferring body position is a two-stage process: first compute a depth map (using structured
Towards Internet-scale Multi-view Stereo
 Towards Internet-scale Multi-view Stereo Yasutaka Furukawa 1 Brian Curless 2 Steven M. Seitz 1,2 Richard Szeliski 3 1 Google Inc. 2 University of Washington 3 Microsoft Research Abstract This paper introduces
Towards Internet-scale Multi-view Stereo Yasutaka Furukawa 1 Brian Curless 2 Steven M. Seitz 1,2 Richard Szeliski 3 1 Google Inc. 2 University of Washington 3 Microsoft Research Abstract This paper introduces
3 Image-Based Photo Hulls. 2 Image-Based Visual Hulls. 3.1 Approach. 3.2 Photo-Consistency. Figure 1. View-dependent geometry.
 Image-Based Photo Hulls Greg Slabaugh, Ron Schafer Georgia Institute of Technology Center for Signal and Image Processing Atlanta, GA 30332 {slabaugh, rws}@ece.gatech.edu Mat Hans Hewlett-Packard Laboratories
Image-Based Photo Hulls Greg Slabaugh, Ron Schafer Georgia Institute of Technology Center for Signal and Image Processing Atlanta, GA 30332 {slabaugh, rws}@ece.gatech.edu Mat Hans Hewlett-Packard Laboratories
Interactive Dense 3D Modeling of Indoor Environments
 Interactive Dense 3D Modeling of Indoor Environments Hao Du 1 Peter Henry 1 Xiaofeng Ren 2 Dieter Fox 1,2 Dan B Goldman 3 Steven M. Seitz 1 {duhao,peter,fox,seitz}@cs.washinton.edu xiaofeng.ren@intel.com
Interactive Dense 3D Modeling of Indoor Environments Hao Du 1 Peter Henry 1 Xiaofeng Ren 2 Dieter Fox 1,2 Dan B Goldman 3 Steven M. Seitz 1 {duhao,peter,fox,seitz}@cs.washinton.edu xiaofeng.ren@intel.com
Colorado School of Mines Computer Vision Professor William Hoff
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
On Benchmarking Camera Calibration and Multi-View Stereo for High Resolution Imagery
 On Benchmarking Camera Calibration and Multi-View Stereo for High Resolution Imagery C. Strecha CVLab EPFL Lausanne (CH) W. von Hansen FGAN-FOM Ettlingen (D) L. Van Gool CVLab ETHZ Zürich (CH) P. Fua CVLab
On Benchmarking Camera Calibration and Multi-View Stereo for High Resolution Imagery C. Strecha CVLab EPFL Lausanne (CH) W. von Hansen FGAN-FOM Ettlingen (D) L. Van Gool CVLab ETHZ Zürich (CH) P. Fua CVLab
Feature Tracking and Optical Flow
 02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
3D/4D acquisition. 3D acquisition taxonomy 22.10.2014. Computer Vision. Computer Vision. 3D acquisition methods. passive. active.
 Das Bild kann zurzeit nicht angezeigt werden. 22.10.2014 3D/4D acquisition 3D acquisition taxonomy 3D acquisition methods passive active uni-directional multi-directional uni-directional multi-directional
Das Bild kann zurzeit nicht angezeigt werden. 22.10.2014 3D/4D acquisition 3D acquisition taxonomy 3D acquisition methods passive active uni-directional multi-directional uni-directional multi-directional
A unified framework for content-aware view selection and planning through view importance
 MAURO et al.: VIEW SELECTION AND PLANNING 1 A unified framework for content-aware view selection and planning through view importance Massimo Mauro 1 m.mauro001@unibs.it Hayko Riemenschneider 2 http://www.vision.ee.ethz.ch/~rhayko/
MAURO et al.: VIEW SELECTION AND PLANNING 1 A unified framework for content-aware view selection and planning through view importance Massimo Mauro 1 m.mauro001@unibs.it Hayko Riemenschneider 2 http://www.vision.ee.ethz.ch/~rhayko/
State of the Art and Challenges in Crowd Sourced Modeling
 Photogrammetric Week '11 Dieter Fritsch (Ed.) Wichmann/VDE Verlag, Belin & Offenbach, 2011 Frahm et al. 259 State of the Art and Challenges in Crowd Sourced Modeling JAN-MICHAEL FRAHM, PIERRE FITE-GEORGEL,
Photogrammetric Week '11 Dieter Fritsch (Ed.) Wichmann/VDE Verlag, Belin & Offenbach, 2011 Frahm et al. 259 State of the Art and Challenges in Crowd Sourced Modeling JAN-MICHAEL FRAHM, PIERRE FITE-GEORGEL,
Incremental Surface Extraction from Sparse Structure-from-Motion Point Clouds
 HOPPE, KLOPSCHITZ, DONOSER, BISCHOF: INCREMENTAL SURFACE EXTRACTION 1 Incremental Surface Extraction from Sparse Structure-from-Motion Point Clouds Christof Hoppe 1 hoppe@icg.tugraz.at Manfred Klopschitz
HOPPE, KLOPSCHITZ, DONOSER, BISCHOF: INCREMENTAL SURFACE EXTRACTION 1 Incremental Surface Extraction from Sparse Structure-from-Motion Point Clouds Christof Hoppe 1 hoppe@icg.tugraz.at Manfred Klopschitz
Introduction to Computer Graphics
 Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 torsten@sfu.ca www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
Introduction to Computer Graphics Torsten Möller TASC 8021 778-782-2215 torsten@sfu.ca www.cs.sfu.ca/~torsten Today What is computer graphics? Contents of this course Syllabus Overview of course topics
3D Scanner using Line Laser. 1. Introduction. 2. Theory
 . Introduction 3D Scanner using Line Laser Di Lu Electrical, Computer, and Systems Engineering Rensselaer Polytechnic Institute The goal of 3D reconstruction is to recover the 3D properties of a geometric
. Introduction 3D Scanner using Line Laser Di Lu Electrical, Computer, and Systems Engineering Rensselaer Polytechnic Institute The goal of 3D reconstruction is to recover the 3D properties of a geometric
Terrain Traversability Analysis using Organized Point Cloud, Superpixel Surface Normals-based segmentation and PCA-based Classification
 Terrain Traversability Analysis using Organized Point Cloud, Superpixel Surface Normals-based segmentation and PCA-based Classification Aras Dargazany 1 and Karsten Berns 2 Abstract In this paper, an stereo-based
Terrain Traversability Analysis using Organized Point Cloud, Superpixel Surface Normals-based segmentation and PCA-based Classification Aras Dargazany 1 and Karsten Berns 2 Abstract In this paper, an stereo-based
Color Segmentation Based Depth Image Filtering
 Color Segmentation Based Depth Image Filtering Michael Schmeing and Xiaoyi Jiang Department of Computer Science, University of Münster Einsteinstraße 62, 48149 Münster, Germany, {m.schmeing xjiang}@uni-muenster.de
Color Segmentation Based Depth Image Filtering Michael Schmeing and Xiaoyi Jiang Department of Computer Science, University of Münster Einsteinstraße 62, 48149 Münster, Germany, {m.schmeing xjiang}@uni-muenster.de
Space Perception and Binocular Vision
 Space Perception and Binocular Vision Space Perception Monocular Cues to Three-Dimensional Space Binocular Vision and Stereopsis Combining Depth Cues 9/30/2008 1 Introduction to Space Perception Realism:
Space Perception and Binocular Vision Space Perception Monocular Cues to Three-Dimensional Space Binocular Vision and Stereopsis Combining Depth Cues 9/30/2008 1 Introduction to Space Perception Realism:
Introduction Epipolar Geometry Calibration Methods Further Readings. Stereo Camera Calibration
 Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration 12.10.2004 Overview Introduction Summary / Motivation Depth Perception Ambiguity of Correspondence
Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration Stereo Camera Calibration 12.10.2004 Overview Introduction Summary / Motivation Depth Perception Ambiguity of Correspondence
Polarized 3D. Achuta Kadambi, MIT Media Lab. Joint work with Vahe Taamazyan, Boxin Shi, and Ramesh Raskar. MIT Media Lab 2
 Polarized 3D Achuta Kadambi, MIT Media Lab Joint work with Vahe Taamazyan, Boxin Shi, and Ramesh Raskar MIT Media Lab 2 MIT Media Lab 3 Microsoft Kinect v2 MIT Media Lab 4 Microsoft Kinect v2 MIT Media
Polarized 3D Achuta Kadambi, MIT Media Lab Joint work with Vahe Taamazyan, Boxin Shi, and Ramesh Raskar MIT Media Lab 2 MIT Media Lab 3 Microsoft Kinect v2 MIT Media Lab 4 Microsoft Kinect v2 MIT Media
Using Photorealistic RenderMan for High-Quality Direct Volume Rendering
 Using Photorealistic RenderMan for High-Quality Direct Volume Rendering Cyrus Jam cjam@sdsc.edu Mike Bailey mjb@sdsc.edu San Diego Supercomputer Center University of California San Diego Abstract With
Using Photorealistic RenderMan for High-Quality Direct Volume Rendering Cyrus Jam cjam@sdsc.edu Mike Bailey mjb@sdsc.edu San Diego Supercomputer Center University of California San Diego Abstract With
Binocular Vision and The Perception of Depth
 Binocular Vision and The Perception of Depth Visual Perception How one visually interprets a scene 4 forms of perception to be studied: Depth Color Temporal Motion Depth Perception How does one determine
Binocular Vision and The Perception of Depth Visual Perception How one visually interprets a scene 4 forms of perception to be studied: Depth Color Temporal Motion Depth Perception How does one determine
Introduction. C 2009 John Wiley & Sons, Ltd
 1 Introduction The purpose of this text on stereo-based imaging is twofold: it is to give students of computer vision a thorough grounding in the image analysis and projective geometry techniques relevant
1 Introduction The purpose of this text on stereo-based imaging is twofold: it is to give students of computer vision a thorough grounding in the image analysis and projective geometry techniques relevant
1. INTRODUCTION Graphics 2
 1. INTRODUCTION Graphics 2 06-02408 Level 3 10 credits in Semester 2 Professor Aleš Leonardis Slides by Professor Ela Claridge What is computer graphics? The art of 3D graphics is the art of fooling the
1. INTRODUCTION Graphics 2 06-02408 Level 3 10 credits in Semester 2 Professor Aleš Leonardis Slides by Professor Ela Claridge What is computer graphics? The art of 3D graphics is the art of fooling the
AJR Automa+c Jamming Recogni+on
 AJR Automa+c Jamming Recogni+on Internet of Things 10 th June 2015 Charles Curry BEng, CEng, FIET Chronos Technology Ltd Presenta(on Contents Chronos Technology The Journey How we got to Now in the IoT
AJR Automa+c Jamming Recogni+on Internet of Things 10 th June 2015 Charles Curry BEng, CEng, FIET Chronos Technology Ltd Presenta(on Contents Chronos Technology The Journey How we got to Now in the IoT
3D Face Modeling. Vuong Le. IFP group, Beckman Institute University of Illinois ECE417 Spring 2013
 3D Face Modeling Vuong Le IFP group, Beckman Institute University of Illinois ECE417 Spring 2013 Contents Motivation 3D facial geometry modeling 3D facial geometry acquisition 3D facial deformation modeling
3D Face Modeling Vuong Le IFP group, Beckman Institute University of Illinois ECE417 Spring 2013 Contents Motivation 3D facial geometry modeling 3D facial geometry acquisition 3D facial deformation modeling
THE PERFORMANCE EVALUATION OF MULTI-IMAGE 3D RECONSTRUCTION SOFTWARE WITH DIFFERENT SENSORS
 International Conference on Sensors & Models in Remote Sensing & Photogrammetry, 23 25 v 2015, Kish Island, Iran THE PERFORMANCE EVALUATION OF MULTI-IMAGE 3D RECONSTRUCTION SOFTWARE WITH DIFFERENT SENSORS
International Conference on Sensors & Models in Remote Sensing & Photogrammetry, 23 25 v 2015, Kish Island, Iran THE PERFORMANCE EVALUATION OF MULTI-IMAGE 3D RECONSTRUCTION SOFTWARE WITH DIFFERENT SENSORS
CS635 Spring 2010. Department of Computer Science Purdue University
 Structured Light Based Acquisition (Part 1) CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Passive vs. Active Acquisition Passive + Just take pictures
Structured Light Based Acquisition (Part 1) CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Passive vs. Active Acquisition Passive + Just take pictures
Window-based, discontinuity preserving stereo
 indow-based, discontinuity preserving stereo Motilal Agrawal SRI International 333 Ravenswood Ave. Menlo Park, CA 94025 agrawal@ai.sri.com Larry S. Davis Univ. of Maryland Dept. of Computer Science College
indow-based, discontinuity preserving stereo Motilal Agrawal SRI International 333 Ravenswood Ave. Menlo Park, CA 94025 agrawal@ai.sri.com Larry S. Davis Univ. of Maryland Dept. of Computer Science College
Surface Reconstruction from Multi-View Stereo
 Surface Reconstruction from Multi-View Stereo Nader Salman 1 and Mariette Yvinec 1 INRIA Sophia Antipolis, France Firstname.Lastname@sophia.inria.fr Abstract. We describe an original method to reconstruct
Surface Reconstruction from Multi-View Stereo Nader Salman 1 and Mariette Yvinec 1 INRIA Sophia Antipolis, France Firstname.Lastname@sophia.inria.fr Abstract. We describe an original method to reconstruct
Kapitel 12. 3D Television Based on a Stereoscopic View Synthesis Approach
 Kapitel 12 3D Television Based on a Stereoscopic View Synthesis Approach DIBR (Depth-Image-Based Rendering) approach 3D content generation DIBR from non-video-rate depth stream Autostereoscopic displays
Kapitel 12 3D Television Based on a Stereoscopic View Synthesis Approach DIBR (Depth-Image-Based Rendering) approach 3D content generation DIBR from non-video-rate depth stream Autostereoscopic displays
Three-Dimensional Data Recovery Using Image-Based Modeling
 Three-Dimensional Data Recovery Using Image-Based Modeling Jeremy W. Cannon Jonathan C. Derryberry Vitaly Y. Kulikov jcannon1@mit.edu jonderry@mit.edu vkulikov@mit.edu Abstract 6.837: Introduction to Computer
Three-Dimensional Data Recovery Using Image-Based Modeling Jeremy W. Cannon Jonathan C. Derryberry Vitaly Y. Kulikov jcannon1@mit.edu jonderry@mit.edu vkulikov@mit.edu Abstract 6.837: Introduction to Computer
PCL - SURFACE RECONSTRUCTION
 PCL - SURFACE RECONSTRUCTION TOYOTA CODE SPRINT Alexandru-Eugen Ichim Computer Graphics and Geometry Laboratory PROBLEM DESCRIPTION 1/2 3D revolution due to cheap RGB-D cameras (Asus Xtion & Microsoft
PCL - SURFACE RECONSTRUCTION TOYOTA CODE SPRINT Alexandru-Eugen Ichim Computer Graphics and Geometry Laboratory PROBLEM DESCRIPTION 1/2 3D revolution due to cheap RGB-D cameras (Asus Xtion & Microsoft
Dense Matching Methods for 3D Scene Reconstruction from Wide Baseline Images
 Dense Matching Methods for 3D Scene Reconstruction from Wide Baseline Images Zoltán Megyesi PhD Theses Supervisor: Prof. Dmitry Chetverikov Eötvös Loránd University PhD Program in Informatics Program Director:
Dense Matching Methods for 3D Scene Reconstruction from Wide Baseline Images Zoltán Megyesi PhD Theses Supervisor: Prof. Dmitry Chetverikov Eötvös Loránd University PhD Program in Informatics Program Director:
6 Space Perception and Binocular Vision
 Space Perception and Binocular Vision Space Perception and Binocular Vision space perception monocular cues to 3D space binocular vision and stereopsis combining depth cues monocular/pictorial cues cues
Space Perception and Binocular Vision Space Perception and Binocular Vision space perception monocular cues to 3D space binocular vision and stereopsis combining depth cues monocular/pictorial cues cues
Blender 3D Animation
 Bachelor Maths/Physics/Computer Science University Paris-Sud Digital Imaging Course Blender 3D Animation Christian Jacquemin Introduction to Computer Animation Animation Basics animation consists in changing
Bachelor Maths/Physics/Computer Science University Paris-Sud Digital Imaging Course Blender 3D Animation Christian Jacquemin Introduction to Computer Animation Animation Basics animation consists in changing
Workshop Report 08w5070 Multi-View and Geometry Processing for 3D Cinematography
 Workshop Report 08w5070 Multi-View and Geometry Processing for 3D Cinematography Rémi Ronfard (Xtranormal Technology and INRIA Rhone-Alpes), Gabriel Taubin (Brown University) July 14-18, 2008 By 3D cinematography
Workshop Report 08w5070 Multi-View and Geometry Processing for 3D Cinematography Rémi Ronfard (Xtranormal Technology and INRIA Rhone-Alpes), Gabriel Taubin (Brown University) July 14-18, 2008 By 3D cinematography
CS 534: Computer Vision 3D Model-based recognition
 CS 534: Computer Vision 3D Model-based recognition Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 High Level Vision Object Recognition: What it means? Two main recognition tasks:!
CS 534: Computer Vision 3D Model-based recognition Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 High Level Vision Object Recognition: What it means? Two main recognition tasks:!
A Short Introduction to Computer Graphics
 A Short Introduction to Computer Graphics Frédo Durand MIT Laboratory for Computer Science 1 Introduction Chapter I: Basics Although computer graphics is a vast field that encompasses almost any graphical
A Short Introduction to Computer Graphics Frédo Durand MIT Laboratory for Computer Science 1 Introduction Chapter I: Basics Although computer graphics is a vast field that encompasses almost any graphical
Data Sheet. definiti 3D Stereo Theaters + definiti 3D Stereo Projection for Full Dome. S7a1801
 S7a1801 OVERVIEW In definiti 3D theaters, the audience wears special lightweight glasses to see the world projected onto the giant dome screen with real depth perception called 3D stereo. The effect allows
S7a1801 OVERVIEW In definiti 3D theaters, the audience wears special lightweight glasses to see the world projected onto the giant dome screen with real depth perception called 3D stereo. The effect allows
Epipolar Geometry. Readings: See Sections 10.1 and 15.6 of Forsyth and Ponce. Right Image. Left Image. e(p ) Epipolar Lines. e(q ) q R.
 Epipolar Lines. e(q ) q R.") Epipolar Geometry We consider two perspective images of a scene as taken from a stereo pair of cameras (or equivalently, assume the scene is rigid and imaged with a single camera from two different locations).
Epipolar Geometry We consider two perspective images of a scene as taken from a stereo pair of cameras (or equivalently, assume the scene is rigid and imaged with a single camera from two different locations).
Deriving Camera and Point Location From a Series of Photos Using Numerical Optimization
 Deriving Camera and Point Location From a Series of Photos Using Numerical Optimization by Chris Studholme Abstract The goal of this project is to discover what attributes of a 3 dimensional scene can
Deriving Camera and Point Location From a Series of Photos Using Numerical Optimization by Chris Studholme Abstract The goal of this project is to discover what attributes of a 3 dimensional scene can
Improvements in Real-Time Correlation-Based Stereo Vision
 Improvements in Real-Time Correlation-Based Stereo Vision Heiko Hirschmüller Centre for Computational Intelligence, De Montfort University, Leicester, LE1 9BH, UK, hhm@dmu.ac.uk. Abstract A stereo vision
Improvements in Real-Time Correlation-Based Stereo Vision Heiko Hirschmüller Centre for Computational Intelligence, De Montfort University, Leicester, LE1 9BH, UK, hhm@dmu.ac.uk. Abstract A stereo vision
DESIGN & DEVELOPMENT OF AUTONOMOUS SYSTEM TO BUILD 3D MODEL FOR UNDERWATER OBJECTS USING STEREO VISION TECHNIQUE
 DESIGN & DEVELOPMENT OF AUTONOMOUS SYSTEM TO BUILD 3D MODEL FOR UNDERWATER OBJECTS USING STEREO VISION TECHNIQUE N. Satish Kumar 1, B L Mukundappa 2, Ramakanth Kumar P 1 1 Dept. of Information Science,
DESIGN & DEVELOPMENT OF AUTONOMOUS SYSTEM TO BUILD 3D MODEL FOR UNDERWATER OBJECTS USING STEREO VISION TECHNIQUE N. Satish Kumar 1, B L Mukundappa 2, Ramakanth Kumar P 1 1 Dept. of Information Science,
What Makes a Great Picture?
 What Makes a Great Picture? Robert Doisneau, 1955 With many slides from Yan Ke, as annotated by Tamara Berg 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Photography 101 Composition Framing
What Makes a Great Picture? Robert Doisneau, 1955 With many slides from Yan Ke, as annotated by Tamara Berg 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Photography 101 Composition Framing
Files Used in this Tutorial
 Generate Point Clouds Tutorial This tutorial shows how to generate point clouds from IKONOS satellite stereo imagery. You will view the point clouds in the ENVI LiDAR Viewer. The estimated time to complete
Generate Point Clouds Tutorial This tutorial shows how to generate point clouds from IKONOS satellite stereo imagery. You will view the point clouds in the ENVI LiDAR Viewer. The estimated time to complete
Immersive Medien und 3D-Video
 Fraunhofer-Institut für Nachrichtentechnik Heinrich-Hertz-Institut Ralf Schäfer schaefer@hhi.de http://ip.hhi.de Immersive Medien und 3D-Video page 1 Outline Immersive Media Examples Interactive Media
Fraunhofer-Institut für Nachrichtentechnik Heinrich-Hertz-Institut Ralf Schäfer schaefer@hhi.de http://ip.hhi.de Immersive Medien und 3D-Video page 1 Outline Immersive Media Examples Interactive Media
High-Resolution Depth for Binocular Image-Based Modelling
 High-Resolution Depth for Binocular Image-Based Modelling David Blumenthal-Barby, Peter Eisert Fraunhofer Heinrich Hertz Institute, Berlin, Germany Humboldt Universität zu Berlin, Germany Abstract We propose
High-Resolution Depth for Binocular Image-Based Modelling David Blumenthal-Barby, Peter Eisert Fraunhofer Heinrich Hertz Institute, Berlin, Germany Humboldt Universität zu Berlin, Germany Abstract We propose
Part-Based Recognition
 Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
Part-Based Recognition Benedict Brown CS597D, Fall 2003 Princeton University CS 597D, Part-Based Recognition p. 1/32 Introduction Many objects are made up of parts It s presumably easier to identify simple
Computer Graphics AACHEN AACHEN AACHEN AACHEN. Public Perception of CG. Computer Graphics Research. Methodological Approaches - - - - - - - - - -
 Public Perception of CG Games Computer Graphics Movies Computer Graphics Research algorithms & data structures fundamental continuous & discrete mathematics optimization schemes 3D reconstruction global
Public Perception of CG Games Computer Graphics Movies Computer Graphics Research algorithms & data structures fundamental continuous & discrete mathematics optimization schemes 3D reconstruction global
Building Rome on a Cloudless Day
 Building Rome on a Cloudless Day Jan-Michael Frahm 1, Pierre Fite-Georgel 1, David Gallup 1, Tim Johnson 1, Rahul Raguram 1, Changchang Wu 1, Yi-Hung Jen 1, Enrique Dunn 1, Brian Clipp 1, Svetlana Lazebnik
Building Rome on a Cloudless Day Jan-Michael Frahm 1, Pierre Fite-Georgel 1, David Gallup 1, Tim Johnson 1, Rahul Raguram 1, Changchang Wu 1, Yi-Hung Jen 1, Enrique Dunn 1, Brian Clipp 1, Svetlana Lazebnik
Modelling 3D Avatar for Virtual Try on
 Modelling 3D Avatar for Virtual Try on NADIA MAGNENAT THALMANN DIRECTOR MIRALAB UNIVERSITY OF GENEVA DIRECTOR INSTITUTE FOR MEDIA INNOVATION, NTU, SINGAPORE WWW.MIRALAB.CH/ Creating Digital Humans Vertex
Modelling 3D Avatar for Virtual Try on NADIA MAGNENAT THALMANN DIRECTOR MIRALAB UNIVERSITY OF GENEVA DIRECTOR INSTITUTE FOR MEDIA INNOVATION, NTU, SINGAPORE WWW.MIRALAB.CH/ Creating Digital Humans Vertex
A Framework for Modeling 3D Scenes using Pose-free Equations
 A Framework for Modeling 3D Scenes using Pose-free Equations DANIEL G. ALIAGA, JI ZHANG, MIREILLE BOUTIN Purdue University Many applications in computer graphics require detailed 3D digital models of real-world
A Framework for Modeling 3D Scenes using Pose-free Equations DANIEL G. ALIAGA, JI ZHANG, MIREILLE BOUTIN Purdue University Many applications in computer graphics require detailed 3D digital models of real-world
Spatio-Temporally Coherent 3D Animation Reconstruction from Multi-view RGB-D Images using Landmark Sampling
 , March 13-15, 2013, Hong Kong Spatio-Temporally Coherent 3D Animation Reconstruction from Multi-view RGB-D Images using Landmark Sampling Naveed Ahmed Abstract We present a system for spatio-temporally
, March 13-15, 2013, Hong Kong Spatio-Temporally Coherent 3D Animation Reconstruction from Multi-view RGB-D Images using Landmark Sampling Naveed Ahmed Abstract We present a system for spatio-temporally
Current status of image matching for Earth observation
 Current status of image matching for Earth observation Christian Heipke IPI - Institute for Photogrammetry and GeoInformation Leibniz Universität Hannover Secretary General, ISPRS Content Introduction
Current status of image matching for Earth observation Christian Heipke IPI - Institute for Photogrammetry and GeoInformation Leibniz Universität Hannover Secretary General, ISPRS Content Introduction
Lecture 12: Cameras and Geometry. CAP 5415 Fall 2010
 Lecture 12: Cameras and Geometry CAP 5415 Fall 2010 The midterm What does the response of a derivative filter tell me about whether there is an edge or not? Things aren't working Did you look at the filters?
Lecture 12: Cameras and Geometry CAP 5415 Fall 2010 The midterm What does the response of a derivative filter tell me about whether there is an edge or not? Things aren't working Did you look at the filters?
BUILDING TELEPRESENCE SYSTEMS: Translating Science Fiction Ideas into Reality
 BUILDING TELEPRESENCE SYSTEMS: Translating Science Fiction Ideas into Reality Henry Fuchs University of North Carolina at Chapel Hill (USA) and NSF Science and Technology Center for Computer Graphics and
BUILDING TELEPRESENCE SYSTEMS: Translating Science Fiction Ideas into Reality Henry Fuchs University of North Carolina at Chapel Hill (USA) and NSF Science and Technology Center for Computer Graphics and
Tracking Densely Moving Markers
 Tracking Densely Moving Markers N. Alberto Borghese and Paolo Rigiroli b) Laboratory of Human Motion Analysis and Virtual Reality (MAVR), Department of Computer Science, University of Milano, Via Comelico
Tracking Densely Moving Markers N. Alberto Borghese and Paolo Rigiroli b) Laboratory of Human Motion Analysis and Virtual Reality (MAVR), Department of Computer Science, University of Milano, Via Comelico
ACCURACY ASSESSMENT OF BUILDING POINT CLOUDS AUTOMATICALLY GENERATED FROM IPHONE IMAGES
 ACCURACY ASSESSMENT OF BUILDING POINT CLOUDS AUTOMATICALLY GENERATED FROM IPHONE IMAGES B. Sirmacek, R. Lindenbergh Delft University of Technology, Department of Geoscience and Remote Sensing, Stevinweg
ACCURACY ASSESSMENT OF BUILDING POINT CLOUDS AUTOMATICALLY GENERATED FROM IPHONE IMAGES B. Sirmacek, R. Lindenbergh Delft University of Technology, Department of Geoscience and Remote Sensing, Stevinweg
The acquisition of appearance properties of real objects: state of the art, challenges, perspectives
 The acquisition of appearance properties of real objects: state of the art, challenges, perspectives Matteo Dellepiane Visual Computing Lab, ISTI-CNR Pisa 26th February 2015 The research leading to these
The acquisition of appearance properties of real objects: state of the art, challenges, perspectives Matteo Dellepiane Visual Computing Lab, ISTI-CNR Pisa 26th February 2015 The research leading to these
Point Cloud Simulation & Applications Maurice Fallon
 Point Cloud & Applications Maurice Fallon Contributors: MIT: Hordur Johannsson and John Leonard U. of Salzburg: Michael Gschwandtner and Roland Kwitt Overview : Dense disparity information Efficient Image
Point Cloud & Applications Maurice Fallon Contributors: MIT: Hordur Johannsson and John Leonard U. of Salzburg: Michael Gschwandtner and Roland Kwitt Overview : Dense disparity information Efficient Image
Digital 3D Animation
 Elizabethtown Area School District Digital 3D Animation Course Number: 753 Length of Course: 1 semester 18 weeks Grade Level: 11-12 Elective Total Clock Hours: 120 hours Length of Period: 80 minutes Date
Elizabethtown Area School District Digital 3D Animation Course Number: 753 Length of Course: 1 semester 18 weeks Grade Level: 11-12 Elective Total Clock Hours: 120 hours Length of Period: 80 minutes Date
A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms
 A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms Steven M. Seitz Brian Curless University of Washington James Diebel Stanford University Daniel Scharstein Middlebury College Richard
A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms Steven M. Seitz Brian Curless University of Washington James Diebel Stanford University Daniel Scharstein Middlebury College Richard
Limitations of Human Vision. What is computer vision? What is computer vision (cont d)?
?") What is computer vision? Limitations of Human Vision Slide 1 Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images
What is computer vision? Limitations of Human Vision Slide 1 Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images
Simple and efficient online algorithms for real world applications
 Simple and efficient online algorithms for real world applications Università degli Studi di Milano Milano, Italy Talk @ Centro de Visión por Computador Something about me PhD in Robotics at LIRA-Lab,
Simple and efficient online algorithms for real world applications Università degli Studi di Milano Milano, Italy Talk @ Centro de Visión por Computador Something about me PhD in Robotics at LIRA-Lab,
Motion Capture Sistemi a marker passivi
 Motion Capture Sistemi a marker passivi N. Alberto Borghese Laboratory of Human Motion Analysis and Virtual Reality (MAVR) Department of Computer Science University of Milano 1/41 Outline Introduction:
Motion Capture Sistemi a marker passivi N. Alberto Borghese Laboratory of Human Motion Analysis and Virtual Reality (MAVR) Department of Computer Science University of Milano 1/41 Outline Introduction:
Interactive Segmentation, Tracking, and Kinematic Modeling of Unknown 3D Articulated Objects
 Interactive Segmentation, Tracking, and Kinematic Modeling of Unknown 3D Articulated Objects Dov Katz, Moslem Kazemi, J. Andrew Bagnell and Anthony Stentz 1 Abstract We present an interactive perceptual
Interactive Segmentation, Tracking, and Kinematic Modeling of Unknown 3D Articulated Objects Dov Katz, Moslem Kazemi, J. Andrew Bagnell and Anthony Stentz 1 Abstract We present an interactive perceptual
Towards Linear-time Incremental Structure from Motion
 Towards Linear-time Incremental Structure from Motion Changchang Wu University of Washington Abstract The time complexity of incremental structure from motion (SfM) is often known as O(n 4 ) with respect
Towards Linear-time Incremental Structure from Motion Changchang Wu University of Washington Abstract The time complexity of incremental structure from motion (SfM) is often known as O(n 4 ) with respect
Turning Mobile Phones into 3D Scanners
 Turning Mobile Phones into 3D Scanners Kalin Kolev, Petri Tanskanen, Pablo Speciale and Marc Pollefeys Department of Computer Science ETH Zurich, Switzerland Abstract In this paper, we propose an efficient
Turning Mobile Phones into 3D Scanners Kalin Kolev, Petri Tanskanen, Pablo Speciale and Marc Pollefeys Department of Computer Science ETH Zurich, Switzerland Abstract In this paper, we propose an efficient
Keeping Pace with Big Data
 - A Data Mining Perspec>ve Huan Liu, Tempe, AZ hep://www.public.asu.edu/~huanliu NSF Workshop on Big Data Analy6cs for Infrastructure and Building Resilience and Sustainability, Beijing, China Sept 19-20,
- A Data Mining Perspec>ve Huan Liu, Tempe, AZ hep://www.public.asu.edu/~huanliu NSF Workshop on Big Data Analy6cs for Infrastructure and Building Resilience and Sustainability, Beijing, China Sept 19-20,
How To Use 3D On A Computer Or Tv
 Display technologies seminar 3D Displays What is 3D? 3D History 3D production 3D Displays 3D now Agenda 13 May 2010 Metropolia University of Applied Sciences Lauri Virkki What is 3D? Eyes are average 64
Display technologies seminar 3D Displays What is 3D? 3D History 3D production 3D Displays 3D now Agenda 13 May 2010 Metropolia University of Applied Sciences Lauri Virkki What is 3D? Eyes are average 64
A NEW SUPER RESOLUTION TECHNIQUE FOR RANGE DATA. Valeria Garro, Pietro Zanuttigh, Guido M. Cortelazzo. University of Padova, Italy
 A NEW SUPER RESOLUTION TECHNIQUE FOR RANGE DATA Valeria Garro, Pietro Zanuttigh, Guido M. Cortelazzo University of Padova, Italy ABSTRACT Current Time-of-Flight matrix sensors allow for the acquisition
A NEW SUPER RESOLUTION TECHNIQUE FOR RANGE DATA Valeria Garro, Pietro Zanuttigh, Guido M. Cortelazzo University of Padova, Italy ABSTRACT Current Time-of-Flight matrix sensors allow for the acquisition
Consolidated Visualization of Enormous 3D Scan Point Clouds with Scanopy
 Consolidated Visualization of Enormous 3D Scan Point Clouds with Scanopy Claus SCHEIBLAUER 1 / Michael PREGESBAUER 2 1 Institute of Computer Graphics and Algorithms, Vienna University of Technology, Austria
Consolidated Visualization of Enormous 3D Scan Point Clouds with Scanopy Claus SCHEIBLAUER 1 / Michael PREGESBAUER 2 1 Institute of Computer Graphics and Algorithms, Vienna University of Technology, Austria
Towards optimal non-rigid surface tracking
 Towards optimal non-rigid surface tracking Martin Klaudiny, Chris Budd, and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, UK {m.klaudiny,chris.budd,a.hilton}@surrey.ac.uk
Towards optimal non-rigid surface tracking Martin Klaudiny, Chris Budd, and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, UK {m.klaudiny,chris.budd,a.hilton}@surrey.ac.uk
DETECTION OF PLANAR PATCHES IN HANDHELD IMAGE SEQUENCES
 DETECTION OF PLANAR PATCHES IN HANDHELD IMAGE SEQUENCES Olaf Kähler, Joachim Denzler Friedrich-Schiller-University, Dept. Mathematics and Computer Science, 07743 Jena, Germany {kaehler,denzler}@informatik.uni-jena.de
DETECTION OF PLANAR PATCHES IN HANDHELD IMAGE SEQUENCES Olaf Kähler, Joachim Denzler Friedrich-Schiller-University, Dept. Mathematics and Computer Science, 07743 Jena, Germany {kaehler,denzler}@informatik.uni-jena.de
MeshLab and Arc3D: Photo-Reconstruction and Processing of 3D meshes
 MeshLab and Arc3D: Photo-Reconstruction and Processing of 3D meshes P. Cignoni, M Corsini, M. Dellepiane, G. Ranzuglia, (Visual Computing Lab, ISTI - CNR, Italy) M. Vergauven, L. Van Gool (K.U.Leuven ESAT-PSI
MeshLab and Arc3D: Photo-Reconstruction and Processing of 3D meshes P. Cignoni, M Corsini, M. Dellepiane, G. Ranzuglia, (Visual Computing Lab, ISTI - CNR, Italy) M. Vergauven, L. Van Gool (K.U.Leuven ESAT-PSI
Limits and Possibilities of Markerless Human Motion Estimation
 Limits and Possibilities of Markerless Human Motion Estimation Bodo Rosenhahn Universität Hannover Motion Capture Wikipedia (MoCap): Approaches for recording and analyzing Human motions Markerless Motion
Limits and Possibilities of Markerless Human Motion Estimation Bodo Rosenhahn Universität Hannover Motion Capture Wikipedia (MoCap): Approaches for recording and analyzing Human motions Markerless Motion
3-D Scene Data Recovery using Omnidirectional Multibaseline Stereo
 Abstract 3-D Scene Data Recovery using Omnidirectional Multibaseline Stereo Sing Bing Kang Richard Szeliski Digital Equipment Corporation Cambridge Research Lab Microsoft Corporation One Kendall Square,
Abstract 3-D Scene Data Recovery using Omnidirectional Multibaseline Stereo Sing Bing Kang Richard Szeliski Digital Equipment Corporation Cambridge Research Lab Microsoft Corporation One Kendall Square,
Photo Uncrop. 1 Introduction. Qi Shan, Brian Curless, Yasutaka Furukawa, Carlos Hernandez, and Steven M. Seitz
 Photo Uncrop Qi Shan, Brian Curless, Yasutaka Furukawa, Carlos Hernandez, and Steven M. Seitz University of Washington Washington University in St. Louis Google Abstract. We address the problem of extending
Photo Uncrop Qi Shan, Brian Curless, Yasutaka Furukawa, Carlos Hernandez, and Steven M. Seitz University of Washington Washington University in St. Louis Google Abstract. We address the problem of extending
ENGN 2502 3D Photography / Winter 2012 / SYLLABUS http://mesh.brown.edu/3dp/
 ENGN 2502 3D Photography / Winter 2012 / SYLLABUS http://mesh.brown.edu/3dp/ Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized
ENGN 2502 3D Photography / Winter 2012 / SYLLABUS http://mesh.brown.edu/3dp/ Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized
Spatial location in 360 of reference points over an object by using stereo vision
 EDUCATION Revista Mexicana de Física E 59 (2013) 23 27 JANUARY JUNE 2013 Spatial location in 360 of reference points over an object by using stereo vision V. H. Flores a, A. Martínez a, J. A. Rayas a,
EDUCATION Revista Mexicana de Física E 59 (2013) 23 27 JANUARY JUNE 2013 Spatial location in 360 of reference points over an object by using stereo vision V. H. Flores a, A. Martínez a, J. A. Rayas a,
Vision based Vehicle Tracking using a high angle camera
 Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu gramos@clemson.edu dshu@clemson.edu Abstract A vehicle tracking and grouping algorithm is presented in this work
Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu gramos@clemson.edu dshu@clemson.edu Abstract A vehicle tracking and grouping algorithm is presented in this work
The Visual Internet of Things System Based on Depth Camera
 The Visual Internet of Things System Based on Depth Camera Xucong Zhang 1, Xiaoyun Wang and Yingmin Jia Abstract The Visual Internet of Things is an important part of information technology. It is proposed
The Visual Internet of Things System Based on Depth Camera Xucong Zhang 1, Xiaoyun Wang and Yingmin Jia Abstract The Visual Internet of Things is an important part of information technology. It is proposed
Online Model Reconstruction for Interactive Virtual Environments
 Online Model Reconstruction for Interactive Virtual Environments Benjamin Lok University of North Carolina at Chapel Hill Department of Computer Science ABSTRACT We present a system for generating real-time
Online Model Reconstruction for Interactive Virtual Environments Benjamin Lok University of North Carolina at Chapel Hill Department of Computer Science ABSTRACT We present a system for generating real-time
Projection Center Calibration for a Co-located Projector Camera System
 Projection Center Calibration for a Co-located Camera System Toshiyuki Amano Department of Computer and Communication Science Faculty of Systems Engineering, Wakayama University Sakaedani 930, Wakayama,
Projection Center Calibration for a Co-located Camera System Toshiyuki Amano Department of Computer and Communication Science Faculty of Systems Engineering, Wakayama University Sakaedani 930, Wakayama,
Dynamic composition of tracking primitives for interactive vision-guided navigation
 Dynamic composition of tracking primitives for interactive vision-guided navigation Darius Burschka and Gregory Hager Johns Hopkins University, Baltimore, USA ABSTRACT We present a system architecture
Dynamic composition of tracking primitives for interactive vision-guided navigation Darius Burschka and Gregory Hager Johns Hopkins University, Baltimore, USA ABSTRACT We present a system architecture
Character Animation from 2D Pictures and 3D Motion Data ALEXANDER HORNUNG, ELLEN DEKKERS, and LEIF KOBBELT RWTH-Aachen University
 Character Animation from 2D Pictures and 3D Motion Data ALEXANDER HORNUNG, ELLEN DEKKERS, and LEIF KOBBELT RWTH-Aachen University Presented by: Harish CS-525 First presentation Abstract This article presents
Character Animation from 2D Pictures and 3D Motion Data ALEXANDER HORNUNG, ELLEN DEKKERS, and LEIF KOBBELT RWTH-Aachen University Presented by: Harish CS-525 First presentation Abstract This article presents
How To Use A Webmail On A Pc Or Macodeo.Com
 Big data workloads and real-world data sets Gang Lu Institute of Computing Technology, Chinese Academy of Sciences BigDataBench Tutorial MICRO 2014 Cambridge, UK INSTITUTE OF COMPUTING TECHNOLOGY 1 Five
Big data workloads and real-world data sets Gang Lu Institute of Computing Technology, Chinese Academy of Sciences BigDataBench Tutorial MICRO 2014 Cambridge, UK INSTITUTE OF COMPUTING TECHNOLOGY 1 Five
Assessment. Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall
 Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
Automatic Photo Quality Assessment Presenter: Yupu Zhang, Guoliang Jin, Tuo Wang Computer Vision 2008 Fall Estimating i the photorealism of images: Distinguishing i i paintings from photographs h Florin
Image-Based Motion Compensation for Structured Light Scanning of Dynamic Surfaces. Sören König and Stefan Gumhold
 Dynamic 3D Imaging (Workshop in Conjunction with DAGM 07) 173 Image-Based Motion Compensation for Structured Light Scanning of Dynamic Surfaces Sören König and Stefan Gumhold TU Dresden, SMT, Department
Dynamic 3D Imaging (Workshop in Conjunction with DAGM 07) 173 Image-Based Motion Compensation for Structured Light Scanning of Dynamic Surfaces Sören König and Stefan Gumhold TU Dresden, SMT, Department
Computer Graphics and Image Processing Introduction
 Computer Graphics and Image Processing Introduction Part 1 Lecture 1 1 COMPSCI 373 Lecturers: A. Prof. Patrice Delmas (303.391) Week 1-4 Contact details: p.delmas@auckland.ac.nz Office: 303-391 (3 rd level
Computer Graphics and Image Processing Introduction Part 1 Lecture 1 1 COMPSCI 373 Lecturers: A. Prof. Patrice Delmas (303.391) Week 1-4 Contact details: p.delmas@auckland.ac.nz Office: 303-391 (3 rd level
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER
 ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
3D Model based Object Class Detection in An Arbitrary View
 3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
Introduction to Computer Graphics. Reading: Angel ch.1 or Hill Ch1.
 Introduction to Computer Graphics Reading: Angel ch.1 or Hill Ch1. What is Computer Graphics? Synthesis of images User Computer Image Applications 2D Display Text User Interfaces (GUI) - web - draw/paint
Introduction to Computer Graphics Reading: Angel ch.1 or Hill Ch1. What is Computer Graphics? Synthesis of images User Computer Image Applications 2D Display Text User Interfaces (GUI) - web - draw/paint
Finding people in repeated shots of the same scene
 Finding people in repeated shots of the same scene Josef Sivic 1 C. Lawrence Zitnick Richard Szeliski 1 University of Oxford Microsoft Research Abstract The goal of this work is to find all occurrences
Finding people in repeated shots of the same scene Josef Sivic 1 C. Lawrence Zitnick Richard Szeliski 1 University of Oxford Microsoft Research Abstract The goal of this work is to find all occurrences
Lighting Estimation in Indoor Environments from Low-Quality Images
 Lighting Estimation in Indoor Environments from Low-Quality Images Natalia Neverova, Damien Muselet, Alain Trémeau Laboratoire Hubert Curien UMR CNRS 5516, University Jean Monnet, Rue du Professeur Benoît
Lighting Estimation in Indoor Environments from Low-Quality Images Natalia Neverova, Damien Muselet, Alain Trémeau Laboratoire Hubert Curien UMR CNRS 5516, University Jean Monnet, Rue du Professeur Benoît
LOCAL SURFACE PATCH BASED TIME ATTENDANCE SYSTEM USING FACE. indhubatchvsa@gmail.com
 LOCAL SURFACE PATCH BASED TIME ATTENDANCE SYSTEM USING FACE 1 S.Manikandan, 2 S.Abirami, 2 R.Indumathi, 2 R.Nandhini, 2 T.Nanthini 1 Assistant Professor, VSA group of institution, Salem. 2 BE(ECE), VSA
LOCAL SURFACE PATCH BASED TIME ATTENDANCE SYSTEM USING FACE 1 S.Manikandan, 2 S.Abirami, 2 R.Indumathi, 2 R.Nandhini, 2 T.Nanthini 1 Assistant Professor, VSA group of institution, Salem. 2 BE(ECE), VSA
Filters for Black & White Photography
 Filters for Black & White Photography Panchromatic Film How it works. Panchromatic film records all colors of light in the same tones of grey. Light Intensity (the number of photons per square inch) is
Filters for Black & White Photography Panchromatic Film How it works. Panchromatic film records all colors of light in the same tones of grey. Light Intensity (the number of photons per square inch) is
Edge tracking for motion segmentation and depth ordering
 Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
Visualization system and applications at BIFI
 Visualization system and applications at BIFI Universidad de Zaragoza Cristina Viñas Overview BIFI presentation Augmented Reality Motivation Complex networks Visualization Laboratory Hardware Demo in the
Visualization system and applications at BIFI Universidad de Zaragoza Cristina Viñas Overview BIFI presentation Augmented Reality Motivation Complex networks Visualization Laboratory Hardware Demo in the
Real-Time Stereo Reconstruction in Robotically Assisted Minimally Invasive Surgery
 Real-Time Stereo Reconstruction in Robotically Assisted Minimally Invasive Surgery Abstract. The recovery of tissue structure and morphology during robotic assisted surgery is an important step towards
Real-Time Stereo Reconstruction in Robotically Assisted Minimally Invasive Surgery Abstract. The recovery of tissue structure and morphology during robotic assisted surgery is an important step towards