SUBSTRUCTURE EXAMPLE. Full Height Abutment on Spread Footing
|
|
|
- Noel Cunningham
- 8 years ago
- Views:
Transcription
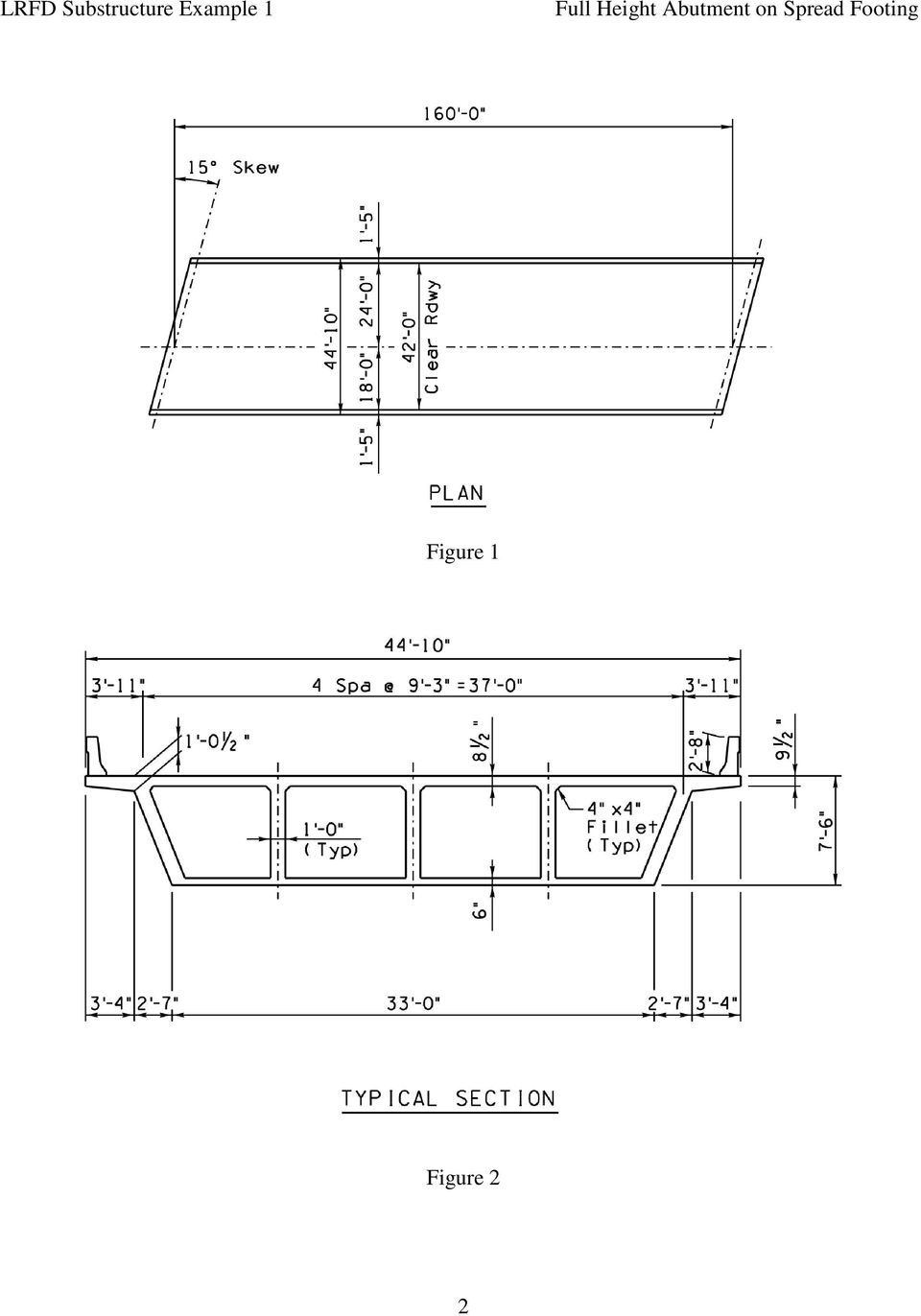
1 SUBSTRUCTURE EXAMPLE Full Height Abutment on Spread Footing This example illustrates the design of a full height abutment on spread footings for a single span ast-in-plae post-tensioned onrete box girder bridge. The bridge has a 160 feet span with a 15 degree skew. Standard ADOT 32-inh f-shape barriers will be used resulting in a typial dek setion onsisting of 1-5 barrier, 12-0 outside shoulder, two 12-0 lanes, a 6-0 inside shoulder and 1-5 barrier. The overall out-to-out width of the bridge is A plan view and typial setion of the bridge are shown in Figures 1 and 2. The following legend is used for the referenes shown in the left-hand olumn: [2.2.2] LRFD Speifiation Artile Number [ ] LRFD Speifiation Table or Equation Number [C2.2.2] LRFD Speifiation Commentary [A2.2.2] LRFD Speifiation Appendix [BDG] ADOT Bridge Design Guideline Superstruture Design Example 1 demonstrates design of the superstruture and bearings for a single span ast-in-plae post-tensioned onrete box girder bridge using LRFD. Critial dimensions and loads are repeated here for ease of referene. Bridge Geometry Bridge span length Bridge width Roadway width Loads DC Superstruture DW Superstruture ft ft ft kips kips Substruture This example demonstrates basi design features for design of a full height abutment supported on a spread footing. The substruture has been analyzed in aordane with the AASHTO LRFD Bridge Design Speifiations, 4 th Edition, 2007 and the 2008 Interim Revisions. Geotehnial The soil profile used in this example is the one used for the Geotehnial Poliy Memo Number 1: Development of Fatored Bearing Resistane Chart by a Geotehnial Engineer for Use by a Bridge Engineer to Size Spread Footings on Soils based on Servie and Strength Limit States. 1

2 Figure 1 Figure 2 2
3 Material Properties [ ] Reinforing Steel Yield Strength f y = 60 ksi Modulus of Elastiity E s = 29,000 ksi Conrete f = 3.5 ksi [ ] [C3.5.1] Unit weight for normal weight onrete is listed below. The unit weight for reinfored onrete is inreased kf greater than that for plain onrete. Unit weight for omputing E = kf Unit weight for DL alulation = kf [C ] The modulus of elastiity for normal weight onrete where the unit weight is kf may be taken as shown below: E = 1820 f ' = = 3405 ksi [5.7.1] The modular ratio of reinforing to onrete should be rounded to the nearest whole number n = = 8.52 Use n = [ ] Modulus of Rupture [ ] β 1 = the ratio of the depth of the equivalent uniformly stressed ompression zone assumed in the strength limit state to the depth of the atual ompression zone stress blok. For onrete strengths not exeeding 4.0 ksi, β 1 = The modulus of rupture for normal weight onrete has several values. When used to alulate servie level raking, as speified in Artile for side reinforing or in Artile for determination of defletions, the following equation should be used: f r = 0.24 f ' = = ksi When the modulus of rupture is used to alulate the raking moment of a member for determination of the minimum reinforing requirement as speified in Artile , the following equation should be used: f r = 0.37 f ' = = ksi 3
![4] The modulus of elastiity for normal weight onrete where the unit weight is 0.145 kf may be taken as shown below: E = 1820 f ' = 1820 3.5 = 3405 ksi [5.7.](/docs-images/40/220690/images/page_3.jpg "1] The modular ratio of reinforing to onrete should be rounded to the nearest whole number. 29")
4 Existing Soil The existing soil has the following properties: Depth ft Soil Type Total unit weight, γ s pf φ degrees 0-25 Fine to oarse sands Gravelly sands Fine to oarse sands Gravels The following assumptions have been made. No groundwater is present. The soils will not experiene any long-term (onsolidation or reep) settlement. The Fatored Net Bearing Resistane Chart plots the fatored net bearing resistane versus effetive footing width for a range of immediate settlements as shown in Figure 3. Figure 3 Bakfill Soil The soil used for bakfill has the following properties: γ s = kf k a =

5 Limit States [1.3.2] [ ] In the LRFD Speifiation, the general equation for design is shown below: η iγ iqi ϕrn = R r For loads for whih a maximum value of γ i is appropriate: [ ] η η η η 0.95 i = D R I For loads for whih a minimum value of γ i is appropriate: [ ] 1 η i = η η η D R I 1.0 [1.3.3] Dutility For strength limit state for onventional design and details omplying with the LRFD Speifiations and for all other limit states: η D = 1.0 [1.3.4] Redundany For the strength limit state for onventional levels of redundany and for all other limit states: η R = 1.0 [1.3.5] Operational Importane For the strength limit state for typial bridges and for all other limit states: η I = 1.0 For an ordinary struture with onventional design and details and onventional levels of dutility, redundany, and operational importane, it an be seen that η i = 1.0 for all ases. Sine multiplying by 1.0 will not hange any answers, the load modifier η i has not been inluded in this example. [BDG] For atual designs, the importane fator may be a value other than one. The importane fator should be seleted in aordane with the ADOT Bridge Design Guidelines. 5
![2.1-3] 1 η i = η η η D R I 1.0 [1.3.3] Dutility For strength limit state for onventional design and details omplying with the LRFD Speifiations and for all other limit states: η D = 1.0 [1.3.4] Redundany For the strength limit state for onventional levels of redundany and for all other limit states: η R = 1.](/docs-images/40/220690/images/page_5.jpg "0 [1.3.5] Operational Importane For the strength limit state for typial bridges and for all other limit states: η I = 1.")
6 SUBSTRUCTURE Loads Setion 3 Loads There are several major hanges and some minor hanges onerning the determination of loads. The DC loads must be kept separate from the DW loads sine different load fators apply. The live load is different as seen in the superstruture design. The dynami load allowane is a onstant rather than a funtion of the span and only applies to members above the ground. The Longitudinal Fore in the Standard Speifiations has been modified and replaed by the Braking Fore. A vehile ollision fore relating to protetion of piers or abutments has been added. The wind and wind on live load is similar but has a modifiation fator for elevations above 30 feet. The vertial wind pressure is the same but the speifiation larifies how to apply the fore to the proper load group. The lateral earth pressure inludes better larifiation of the following items: when to use the Rankine or Coulomb Method, when to use ative or at rest pressure, and when to use the equivalent fluid pressure method. The disussion of dead and live load surharges is enhaned. Figure 4 Abutment 1 is pinned while Abutment 2 is expansion. The pinned abutment will resist externally applied longitudinal fores. The expansion abutment will resist the frition and internal fores from the deformation of the bearing pads. Sine determining whih abutment is ritial is not obvious, the fores at eah abutment will be determined. [10.5.2] [10.5.3] Limit States For substruture design, foundation design at the servie limit state inludes settlement, lateral displaement and overall stability. Foundation design at the strength limit state inludes bearing resistane, limiting eentriity (exessive loss of ontat), sliding at the base of the footing, and strutural resistane. Three strength limit states require investigation. Strength I is the basi load ombination without wind. Strength III is the load ombination inluding wind exeeding 55 mph. Strength V is the load ombination ombining normal vehiular use with a wind of 55 mph. 6

7 [3.6.5] For substruture design, Extreme Event I load ombination inludes seismi events while Extreme Event II load ombination inludes ollision of substruture units by vehiles. These limit states are not onsidered in this example. A diagram showing the general dimensions (feet) for the abutment follows: Figure 5 7
 for the abutment follows:")
8 [3.5] [3.5.1] PERMANENT LOADS DC Dead Load Strutural Components DC superstruture dead load inludes self-weight inluding intermediate and abutment diaphragms and barriers. DC Superstruture = k e long = (16.00 / ) = 1.25 ft M long = ( )(1.25) = 1537 ft-k DC substruture dead load inludes the weight of the abutment inluding end bloks, wingwalls and footing. Item N H W L Weight X A M A Bakwall Seat / Stem Footing End Blk / Wing Total DC Substruture = k.g. =7631 / = ft e long = / = ft M long = (947.85)(-0.051) = -48 ft-k DW Dead Load Wearing Surfae and Utilities The DW superstruture load inludes the future wearing surfae and utility loads. This bridge has no utilities. DW = k M long = (85.63)(1.25) = 107 ft-k EV - Vertial Earth Pressure The LRFD Speifiation does not provide data on unit weights of well ompated soils. For this example use a vertial earth pressure based on a unit weight of kf. In atual design use the values speified in the Geotehnial Report. 8

9 Design for the full height of the wall even though the soil only extends to the top of the seat. To avoid the omplexities of how to deal with the weight of the approah slab it is simpler to design for the taller height of soil. Item N H W L Weight X A M A Toe Heel Seat / Total Note: Some numbers may not add up due to rounding. EV = 850 kips.g. = 9879 / = ft e long = / = ft M long = (849.89)(-3.624) = ft-k [3.11.5] EH - Horizontal Earth Pressure Two deisions must be made before analysis begins: (1) whether to use at-rest or ative lateral earth pressure and (2) whether to use the Rankine or Coulomb theory. Typial abutments supported on ohensionless soils with elastomeri bearings supporting the superstruture with strutural grade bakfill will deflet adequately to mobilize ative soil pressure. Therefore, ative pressure will be used in the design. [C ] The LRFD Speifiation states that the Coulomb method is neessary for design of retaining walls where the bak fae of the wall interferes with the development of the full sliding surfaes in the bakfill soil assumed in the Rankine theory. Abutment onrete antilever walls with short heels will require the use of the Coulomb method. Abutment onrete antilever walls with long heels may be designed with either the Rankine or Coulomb method. The LRFD Speifiation indiates that the Rankine method of determining lateral earth pressure is not appropriate when the heel is determined to be a short heel. However, the use of the Coulomb Method is a major departure from ADOT past pratie. In addition, a value of frition must be onsidered in the Coulomb Method yet the reommended value varies widely. 9

10 Foundation Analysis and Design by Bowles partially agrees with the LRFD Speifiation but omes to the onlusion that neither method in its pure form an be used. However, either method an be used if the following modifiation is made: the soil loads are applied to a vertial line extending from the end of the heel and the soil on top of the heel is treated as a stati load. [BDG] The Rankine formula provides more onservative designs, is allowed per ADOT Bridge Design Guidelines and will be used in this example. The soil data will be provided in the Geotehnial Report. For this problem assume that the soil extends to the full height of the abutment with the following properties: γ s = kf k a = The lateral earth pressure is assumed to be linearly proportional to the depth of earth and taken as: [ ] p = k a γ s z = (0.295)(0.120)(24.50) = ksf/ft EH = 0.5(0.867)(24.50)(46.41) = k/ft The resultant ats at a height of H/3 above the base of the wall. M long = (493.08)(24.50) / 3 = 4027 ft-k/ft 10
![stati load. [BDG] The Rankine formula provides more onservative designs, is allowed per ADOT Bridge Design Guidelines and will be used in this example.](/docs-images/40/220690/images/page_10.jpg "The soil data will be provided in the Geotehnial Report. For this problem assume that the soil extends to the full height of the abutment with the following properties: γ s = 0.120 kf k a = 0.")
11 TRANSIENT LOADS [ ] [ ] [ ] LL Vehiular Live Load The number of design lanes is the integer part of the ratio w/12 = 42.00/12 = 3 where w is the lear roadway width. The ritial live load reation is the ombination of the design lane (52.19 kips) and design truk (67.80 kips). Refer to the Superstruture Example 1 for alulation of the live load reations. Apply the multiple presene fator, m, for the reation. Critial values are underlined. One Vehile Two Vehiles Three Vehiles P = ( )(1.20)(1) = k e L = / os(15) = ft M trans = (143.99)(16.56) = 2384 ft-k M long = (143.99)(1.25) = 180 ft-k P = ( )(1.00)(2) = k e L = / os(15) = ft M trans = (239.98)(10.35) = 2484 ft-k M long = (239.98)(1.25) = 300 ft-k P = ( )(0.85)(3) = k e L = 4.00 / os(15) = 4.14 ft M trans = (305.97)(4.14) = 1267 ft-k M long = (305.97)(1.25) = 382 ft-k Figure 6 11
(16.56) = 2384 ft-k M long = (143.99)(1.25) = 180 ft-k P = (52.19 + 67.80)(1.00)(2) = 239.98 k e L = 10.00 / os(15) = 10.35 ft M trans = (239.98)(10.")
12 To simplify the problem, the maximum reation and moments will be used even though they do not our simultaneously. This will redue the number of load ases without substantially simplifying the design. [3.6.2] IM Dynami Load Allowane Dynami load allowane need not apply for foundation omponents that are entirely below ground suh as footings. For the portion of the abutment above the ground, the dynami load allowane is only a design load for the stem. [3.6.4] BR Vehiular Braking Fore The braking fore shall be taken as the greater of: 25 perent of the axle weights of the design truk or design tandem V = (0.25)( ) = k <= Critial V = (0.25)( ) = k 5 perent of the design truk plus lane load or 5 perent of the design tandem plus lane load V = (0.05)[ (160.00)(0.640)] = 8.72 k V = (0.05)[ (160.00)(0.640)] = 7.62 k It should be noted that the truk load will always ontrol and the tandem fore need not be alulated. The braking fore shall be plaed in all design lanes that are onsidered to be loaded whih arry traffi in the same diretion. For this bridge the number of lanes equals the lear roadway width of 42 feet divided by 12 foot lanes = 3.5. Sine only full lanes are used, use 3 lanes. The bridge is a one diretional struture with all lanes headed in the same diretion. Therefore, all design lanes shall be simultaneously loaded and the multiple presene fator shall apply. BR = (18.00)(3)(0.85) = k This load is applied 6 feet above the dek surfae. However, due to the pinned restraint the longitudinal fore will be applied at the seat level. V long = os(15) = k V trans = sin(15) = k M long = (44.34)(16.83) = 746 ft-k M trans = (11.88)(16.83) = 200 ft-k 12
(32 + 32 + 8) = 18.00 k <= Critial V = (0.")
13 [ ] LS - Live Load Surharge A live load surharge shall be applied where a vehiular load is expeted to at on the surfae of the bakfill within a distane equal to one-half the wall height behind the bak fae of the wall. The inrease in horizontal pressure due to live load surharge may be estimated as: [ ] p = kγ s h eq where: [ ] γ s = total unit weight of soil = kf k = oeffiient of lateral earth pressure, k a, for walls that deflet h eq = equivalent height of soil for vehiular load from Table 1 = 2.0 ft for abutment height > 20.0 feet p = (0.295)(0.120)(2.0) = ksf P = (0.120)(2.0)(6.5)(46.41) = k V long = (0.0708)(24.50)(46.41) = k M long = (80.50)(24.50) / 2 = 986 ft-k [C3.4.1] [ ] The vertial weight of the soil surharge is to be inluded for foundation designs where the load inreases the load effet but ignored where the load inreases the resistane. For bearing resistane the vertial soil weight on the heel will inrease the total load and therefore the load effet and should be inluded. For sliding resistane and overturning the vertial soil weight will inrease the resistane and therefore should be ignored. If the vehiular loading is transmitted through a strutural slab, whih is also supported by means other than earth, a orresponding redution in the surharge loads may be permitted. The standard ADOT approah slab satisfies this riterion. However, the abutment is tall ompared to the slab length and no method is provided to determine the amount of the redution, so the full live load surharge will be used. In addition, onstrution vehiles ould produe a live load surharge before the approah slab is onstruted. 13
![fae of the wall. The inrease in horizontal pressure due to live load surharge may be estimated as: 4-1] p = kγ s h eq where: 4-1] γ s = total unit weight of soil = 0.](/docs-images/40/220690/images/page_13.jpg "120 kf k = oeffiient of lateral earth pressure, k a, for walls that deflet h eq = equivalent height of soil for vehiular load from Table 1 = 2.0 ft for abutment height > 20.0 feet p = (0.295)(0.")
14 [3.8] [ ] WS Wind Load on Struture Wind pressures are based on a base design wind veloity of 100 mph. For strutures with heights over 30 feet above the groundline, a formula is available to adjust the wind veloity. The wind is assumed to at uniformly on the area exposed to the wind. The exposed area is the sum of the areas of all omponents as seen in elevation taken perpendiular to the assumed wind diretion. Height = (44.83) = ft Area = (11.07)(160.00) = 1770 ft 2 Wind on Superstruture [ ] The base pressure for girder bridges orresponding to the 100 mph wind is psf. The minimum wind loading shall not be less than 0.30 klf. Sine the girder bridge has spans greater than 125 feet, the wind must be evaluated for various angles of attak. The enter of gravity of the loads is loated (11.07) / 2 = feet above the bottom of the footing. Wind fore in the diretion of the span will be applied at the top of the seat due to the pinned ondition. Wind pressures for various angles of attak are taken from Table Refer to Figure 4 for proper inlusion of the skew affet for the load ombinations. Critial values are underlined. Pinned Abutment 0 Degree Skew Angle V long = [(1770)(0.050)sin(15)]/2 + (1770)(0.000)os(15) = k V trans = [(1770)(0.050)os(15)]/2 + (1770)(0.000)sin(15) = k M long = [(1770)(0.050)(22.36)sin(15)]/2 + (1770)(0.000)(16.83)os(15) = 256 ft-k M trans = [(1770)(0.050)(22.36)os(15)]/2 + (1770)(0.000)(16.83)sin(15) = 956 ft-k 15 Degree Skew Angle V long = [(1770)(0.044)sin(15)]/2 + (1770)(0.006)os(15) = k V trans = [(1770)(0.044)os(15)]/2 + (1770)(0.006)sin(15) = k M long = [(1770)(0.044)(22.36)sin(15)]/2 + (1770)(0.006)(16.83)os(15) = 398 ft-k M trans = [(1770)(0.044)(22.36)os(15)]/2 + (1770)(0.006)(16.83)sin(15) = 887 ft-k 14
 = 1770 ft 2 Wind on Superstruture [3.8.1.2.1] The base pressure for girder bridges orresponding to the 100 mph wind is 0.050 psf. The minimum wind loading shall not be less than 0.30 klf.")
15 30 Degree Skew Angle V long = [(1770)(0.041)sin(15)]/2 + (1770)(0.012)os(15) = k V trans = [(1770)(0.041)os(15)]/2 + (1770)(0.012)sin(15) = k M long = [(1770)(0.041)(22.36)sin(15)]/2 + (1770)(0.012)(16.83)os(15) = 555 ft-k M trans = [(1770)(0.041)(22.36)os(15)]/2 + (1770)(0.012)(16.83)sin(15) = 876 ft-k 45 Degree Skew Angle V long = [(1770)(0.033)sin(15)]/2 + (1770)(0.016)os(15) = k V trans = [(1770)(0.033)os(15)]/2 + (1770)(0.016)sin(15) = k M long = [(1770)(0.033)(22.36)sin(15)]/2 + (1770)(0.016)(16.83)os(15) = 629 ft-k M trans = [(1770)(0.033)(22.36)os(15)]/2 + (1770)(0.016)(16.83)sin(15) = 754 ft-k 60 Degree Skew Angle V long = [(1770)(0.017)sin(15)]/2 + (1770)(0.019)os(15) = k V trans = [(1770)(0.017)os(15)]/2 + (1770)(0.019)sin(15) = k M long = [(1770)(0.017)(22.36)sin(15)]/2 + (1770)(0.019)(16.83)os(15) = 634 ft-k M trans = [(1770)(0.017)(22.36)os(15)]/2 + (1770)(0.019)(16.83)sin(15) = 471 ft-k Expansion Abutment 0 Degree Skew Angle V long = [(1770)(0.050)sin(15)]/2 = k V trans = [(1770)(0.050)os(15)]/2 = k M long = [(1770)(0.050)(22.36)sin(15)]/2 = 256 ft-k M trans = [(1770)(0.050)(22.36)os(15)]/2 = 956 ft-k 15 Degree Skew Angle V long = [(1770)(0.044)sin(15)]/2 = k V trans = [(1770)(0.044)os(15)]/2 = k M long = [(1770)(0.044)(22.36)sin(15)]/2 = 225 ft-k M trans = [(1770)(0.044)(22.36)os(15)]/2 = 841 ft-k 15
![033)sin(15)]/2 + (1770)(0.016)os(15) = 34.91 k V trans = [(1770)(0.033)os(15)]/2 + (1770)(0.016)sin(15) = 35.54 k M long = [(1770)(0.033)(22.36)sin(15)]/2 + (1770)(0.016)(16.](/docs-images/40/220690/images/page_15.jpg "83)os(15) = 629 ft-k M trans = [(1770)(0.033)(22.36)os(15)]/2 + (1770)(0.016)(16.83)sin(15) = 754 ft-k 60 Degree Skew Angle V long = [(1770)(0.017)sin(15)]/2 + (1770)(0.019)os(15) = 36.")
16 30 Degree Skew Angle V long = [(1770)(0.041)sin(15)]/2 = 9.39 k V trans = [(1770)(0.041)os(15)]/2 = k M long = [(1770)(0.041)(22.36)sin(15)]/2 = 210 ft-k M trans = [(1770)(0.041)(22.36)os(15)]/2 = 784 ft-k 45 Degree Skew Angle V long = [(1770)(0.033)sin(15)]/2 = 7.56 k V trans = [(1770)(0.033)os(15)]/2 = k M long = [(1770)(0.033)(22.36)sin(15)]/2 = 169 ft-k M trans = [(1770)(0.033)(22.36)os(15)]/2 = 631 ft-k 60 Degree Skew Angle V long = [(1770)(0.017)sin(15)]/2 = 3.89 k V trans = [(1770)(0.017)os(15)]/2 = k M long = [(1770)(0.017)(22.36)sin(15)]/2 = 87 ft-k M trans = [(1770)(0.017)(22.36)os(15)]/2 = 325 ft-k A onservative answer an be ahieved by simplifying the problem by using the maximum values in eah diretion ating simultaneously. If wind ontrols the design, the omplexities of ombining 5 wind ombinations should be performed. A summary of wind fores used in the design follows: Pinned V long = k V trans = k M long = 634 ft-k M trans = 956 ft-k Expansion k k 256 ft-k 956 ft-k Wind on Substruture [ ] The transverse and longitudinal fores to be applied diretly to the substruture are alulated from an assumed base wind pressure of ksf. Beause the longitudinal wind blows opposite the earth pressure, the ritial wind on substruture load in the longitudinal diretion will be zero. V long = 0 k V trans = 0.040[(10.50)(18.00)] = 7.56 k M long = 0 ft-k M trans = 0.040(10.50)(18.00)(15.50) = 117 ft-k 16
![017)sin(15)]/2 = 3.89 k V trans = [(1770)(0.017)os(15)]/2 = 14.53 k M long = [(1770)(0.017)(22.](/docs-images/40/220690/images/page_16.jpg "36)sin(15)]/2 = 87 ft-k M trans = [(1770)(0.017)(22.")
17 [ ] WL Wind Pressure on Vehiles Wind pressure on vehiles is represented by a moving fore of 0.10 klf ating normal to and 6.0 feet above the roadway. Loads normal to the span should be applied at a height of = ft Pinned Abutment 0 Degree Skew Angle V long = [(0.100)sin(15)/2 + (0.000)os(15)] = 2.07 k V trans = [(0.100)os(15)/2 + (0.000)sin(15)] = 7.73 k M long = [(0.100)(30.50)sin(15)/2 + (0.000)(16.83)os(15)] = 63 ft-k M trans = [(0.100)(30.50)os(15)/2 + (0.000)(16.83)sin(15)] = 236 ft-k 15 Degree Skew Angle V long = [(0.088)sin(15)/2 + (0.012)os(15)] = 3.68 k V trans = [(0.088)os(15)/2 + (0.012)sin(15)] = 7.30 k M long = [(0.088)(30.50)sin(15)/2 + (0.012)(16.83)os(15)] = 87 ft-k M trans = [(0.088)(30.50)os(15)/2 + (0.012)(16.83)sin(15)] = 216 ft-k 30 Degree Skew Angle V long = [(0.082)sin(15)/2 + (0.024)os(15)] = 5.41 k V trans = [(0.082)os(15)/2 + (0.024)sin(15)] = 7.33 k M long = [(0.082)(30.50)sin(15)/2 + (0.024)(16.83)os(15)] = 114 ft-k M trans = [(0.082)(30.50)os(15)/2 + (0.024)(16.83)sin(15)] = 210 ft-k 45 Degree Skew Angle V long = [(0.066)sin(15)/2 + (0.032)os(15)] = 6.31 k V trans = [(0.066)os(15)/2 + (0.032)sin(15)] = 6.43 k M long = [(0.066)(30.50)sin(15)/2 + (0.032)(16.83)os(15)] = 125 ft-k M trans = [(0.066)(30.50)os(15)/2 + (0.032)(16.83)sin(15)] = 178 ft-k 17
![000)sin(15)] = 7.73 k M long = 160.00[(0.100)(30.50)sin(15)/2 + (0.000)(16.83)os(15)] = 63 ft-k M trans = 160.00[(0.100)(30.50)os(15)/2 + (0.000)(16.83)sin(15)] = 236 ft-k 15 Degree Skew Angle V long = 160.](/docs-images/40/220690/images/page_17.jpg "00[(0.088)sin(15)/2 + (0.012)os(15)] = 3.68 k V trans = 160.00[(0.088)os(15)/2 + (0.012)sin(15)] = 7.30 k M long = 160.00[(0.088)(30.50)sin(15)/2 + (0.012)(16.83)os(15)] = 87 ft-k M trans = 160.00[(0.088)(30.50)os(15)/2 + (0.")
18 60 Degree Skew Angle V long = [(0.034)sin(15)/2 + (0.038)os(15)] = 6.58 k V trans = [(0.034)os(15)/2 + (0.038)sin(15)] = 4.20 k M long = [(0.034)(30.50)sin(15)/2 + (0.038)(16.83)os(15)] = 120 ft-k M trans = [(0.034)(30.50)os(15)/2 + (0.038)(16.83)sin(15)] = 107 ft-k Expansion Abutment 0 Degree Skew Angle V long = (0.100)sin(15)/2 = 2.07 k V trans = (0.100)os(15)/2 = 7.73 k M long = (0.100)(30.50)sin(15)/2 = 63 ft-k M trans = (0.100)(30.50)os(15)/2 = 236 ft-k 15 Degree Skew Angle V long = (0.088)sin(15)/2 = 1.82 k V trans = (0.088)os(15)/2 = 6.80 k M long = (0.088)(30.50)sin(15)/2 = 56 ft-k M trans = (0.088)(30.50)os(15)/2 = 207 ft-k 30 Degree Skew Angle V long = (0.082)sin(15)/2 = 1.70 k V trans = (0.082)os(15)/2 = 6.34 k M long = (0.082)(30.50)sin(15)/2 = 52 ft-k M trans = (0.082)(30.50)os(15)/2 = 193 ft-k 45 Degree Skew Angle V long = (0.066)sin(15)/2 = 1.37 k V trans = (0.066)os(15)/2 = 5.10 k M long = (0.066)(30.50)sin(15)/2 = 42 ft-k M trans = (0.066)(30.50)os(15)/2 = 156 ft-k 60 Degree Skew Angle V long = (0.034)sin(15)/2 = 0.70 k V trans = (0.034)os(15)/2 = 2.63 k M long = (0.034)(30.50)sin(15)/2 = 21 ft-k M trans = (0.034)(30.50)os(15)/2 = 80 ft-k 18
(30.50)sin(15)/2 = 56 ft-k M trans = 160.00(0.088)(30.50)os(15)/2 = 207 ft-k 30 Degree Skew Angle V long = 160.00(0.082)sin(15)/2 = 1.70 k V trans = 160.00(0.082)os(15)/2 = 6.")
19 A onservative answer for wind on live load an be ahieved by using the maximum values in eah diretion ating simultaneously. If wind ontrols the design, the omplexities of ombining 5 wind diretions should be performed. Pinned V long = 6.58 k V trans = 7.73 k M long = 125 ft-k M trans = 236 ft-k Expansion 2.07 k 7.73 k 63 ft-k 236 ft-k [3.8.2] Vertial Wind Pressure A vertial upward wind fore of ksf times the width of the dek shall be applied at the windward quarter point of the dek. This load is only applied for limit states whih inlude wind but not wind on live load (Strength III Limit State) and only when the diretion of wind is taken to be perpendiular to the longitudinal axis of the bridge. When appliable the wind loads are as shown: P = (0.020)(44.83)(160) / 2 = upward M trans = [71.73(44.83) / 4]os(15) = 777 ft-k M long = [71.73(44.83) / 4]sin(15) = 208 ft-k [3.13] [ ] [ ] FR Frition Fores Frition fores from the greased bearings aused by superstruture movement will be transmitted to the substruture for Abutment 2, the expansion abutment. These fores will our during the stressing operation and for a short period of time afterwards while the bridge undergoes long term prestress shortening. This fore was alulated for the elastomeri bearing for the Superstruture Example 1 as repeated below: H bu = µp u P u = 1.25DC DW P u = 1.25(245.86) (17.13) = k H bu = (0.10)(333.02) = k per bearing pad It is important to note that this fore is already fatored and only applies to strength and extreme event limit states. Table does list FR as a load with a load fator of 1.0 for all limit states inluding servie. However, this FR does not apply to servie limit states. 19
![73 k 63 ft-k 236 ft-k [3.8.2] Vertial Wind Pressure A vertial upward wind fore of 0.020 ksf times the width of the dek shall be applied at the windward quarter point of the dek.](/docs-images/40/220690/images/page_19.jpg "This load is only applied for limit states whih inlude wind but not wind on live load (Strength III Limit State) and only when the diretion of wind is taken to be perpendiular to the longitudinal")
20 V trans = (33.30)(5 bearings)sin(15) = k V long = (33.30)(5 bearings)os(15) = k M trans = (43.09)(16.83) = 725 ft-k M long = (160.83)(16.83) = 2707 ft-k Bearing Translation The elastomeri bearing pad will also transmit fores to the substruture due to horizontal displaements aused by temperature, shrinkage, reep and prestress shortening. For the greased pad the shrinkage, reep and prestress shortening are resisted as a frition load so there is no diret load for SH and CR. The fore due to deformation of an elastomeri bearing pad due to TU shall be taken as: [ ] H bu = GA h u rt u = shear deformation from appliable strength and extreme event load ombinations in Table h rt = ( )(3 interior) + ( )(2 exterior) = 1.70 [BDG] [BDG] For a post-tensioned box girder with greased sliding pads the elasti shortening and reep are assumed to be taken by the greased pad in a sliding mode. Afterwards the grease hardens and the pad resists temperature movement by deformation of the pad. The strength limit state load fator for TU deformations is The 0.65 fator reflets the fat that the pads are not always onstruted at the mean temperature. The temperature range for elevations less than 3000 feet is 90 degrees. u = (0.50)(0.65)( )(90)(160)(12) = in H bu = ( 0.130) (28) (14) = kips 1.70 The fore from frition (33.30 k/pad) is higher than the fore resulting from the internal deformation of the elastomeri bearing (10.10 k/pad). This bearing translation fore only applies to the strength and extreme event load ombinations and is also already fatored. Sine the FR fores are greater than the TU fores and only one fore an our at a time, only the FR fores will be onsidered further. 20

21 Bearing Rotation Rotations in the elastomeri bearing pads will ause bending moments that will be transmitted to the substruture. For unonfined elastomeri bearings the moment shall be taken as: [ ] M u = 1.60 ( 0.5E I ) θ h s rt where: I = moment of inertia of plan shape of bearing I = WL 3 /12 = (28)(14) 3 / 12 = 6403 in 3 [C ] E = effetive modulus of elastomeri bearing in ompression E = 6GS 2 = 6(0.130)(11) 2 = ksi Refer to Example 1 Superstruture Bearing alulations. θ S = radians Strength Limit States [ ] M u = ( 1.60) (0.5) (94.38) (6403) 12 = 199 ft-k 1.70 M long = (199)(5 bearings)os(15) = 961 ft-k M trans = (199)(5 bearings)sin(15) = 258 ft-k Again this moment is already fatored. The 1.60 fator in the formula is the load fator that allows for use of servie limit rotations. This load only applies to the strength and extreme limit states. 21
22 A summary of unfatored axial loads, shears and moments exept as otherwise noted follows: Abutment 1 (Pinned) Load P max P min V long V trans M long M trans kip kip kip kip ft-k ft-k DC super DC sub DC DW EV EH LL BR LS WS super WS sub WS WS vertial WL FR * Bearing Rotation* Abutment 2 (Expansion) Load P max P min V long V trans M long M trans kip kip kip kip ft-k ft-k DC super DC sub DC DW EV EH LL BR LS WS super WS sub WS WS vertial WL FR* Bearing Rotation* * Loads are fatored and only apply to strength limit states 22
23 [ ] LOAD COMBINATIONS STRENGTH I Max = 1.25DC DW EH EV (LL + BR +LS) + FR + Bearing Min = 0.90DC DW EH EV (LL + BR + LS) + FR + Bearing STRENGTH III Max = 1.25DC DW EH EV (WS + WS vert ) + FR + Bearing Min = 0.90DC DW EH EV (WS + WS vert ) + FR + Bearing STRENGTH IV Max = 1.50DC DW EH EV + FR + Bearing STRENGTH V Max = 1.25DC DW EH EV (LL + BR + LS) WS WL + FR + Bearing Min = 0.90DC DW EH EV (LL + BR + LS) WS WL + FR + Bearing SERVICE I Max = 1.00(DC + DW + EH + EV) (LL + BR + LS) WS WL The moment due to bearing rotation and frition fores from the bearing only apply to strength limit states and are already fatored. As previously disussed, CR and SH fores are not ritial for this bridge and are not inluded in the load ombinations above. 23
24 General The methods used to estimate loads for the design of foundations using LRFD are fundamentally the same as the proedures used in the past for ASD. What has hanged is the way the loads are onsidered for evaluation of foundation stability (bearing and sliding resistane of spread footing foundations) and foundation deformation. The design of foundations supporting bridge abutments should onsider all limit states loading onditions appliable to the struture being designed. The following Strength Limit States may ontrol the design and should be investigated: Strength I Limit State will ontrol for high live to dead load ratios. Strength III or V will ontrol for strutures subjeted to high wind loads Strength IV Limit State will ontrol for high dead to live load ratios A spread footing foundation will be evaluated for the following failure onditions: 1. Bearing Resistane Strength Limit States 2. Settlement Servie I Limit State 3. Sliding Resistane Strength Limit States 4. Load Eentriity (Overturning) Strength Limit States 5. Overall Stability Servie I Limit State 6. Strutural Resistane Servie I and Strength Limit States 24
In order to be able to design beams, we need both moments and shears. 1. Moment a) From direct design method or equivalent frame method
 From direct design method or equivalent frame method") BEAM DESIGN In order to be able to design beams, we need both moments and shears. 1. Moment a) From diret design method or equivalent frame method b) From loads applied diretly to beams inluding beam weight
BEAM DESIGN In order to be able to design beams, we need both moments and shears. 1. Moment a) From diret design method or equivalent frame method b) From loads applied diretly to beams inluding beam weight
Fig. 1.1 Rectangular foundation plan.
 Footings Example 1 Design of a square spread footing of a seven-story uilding Design and detail a typial square spread footing of a six ay y five ay seven-story uilding, founded on stiff soil, supporting
Footings Example 1 Design of a square spread footing of a seven-story uilding Design and detail a typial square spread footing of a six ay y five ay seven-story uilding, founded on stiff soil, supporting
CHAPTER J DESIGN OF CONNECTIONS
 J-1 CHAPTER J DESIGN OF CONNECTIONS INTRODUCTION Chapter J of the addresses the design and heking of onnetions. The hapter s primary fous is the design of welded and bolted onnetions. Design requirements
J-1 CHAPTER J DESIGN OF CONNECTIONS INTRODUCTION Chapter J of the addresses the design and heking of onnetions. The hapter s primary fous is the design of welded and bolted onnetions. Design requirements
) ( )( ) ( ) ( )( ) ( ) ( ) (1)
 ( )( ) ( ) ( )( ) ( ) ( ) (1)") OPEN CHANNEL FLOW Open hannel flow is haraterized by a surfae in ontat with a gas phase, allowing the fluid to take on shapes and undergo behavior that is impossible in a pipe or other filled onduit. Examples
OPEN CHANNEL FLOW Open hannel flow is haraterized by a surfae in ontat with a gas phase, allowing the fluid to take on shapes and undergo behavior that is impossible in a pipe or other filled onduit. Examples
Measurement of Powder Flow Properties that relate to Gravity Flow Behaviour through Industrial Processing Lines
 Measurement of Powder Flow Properties that relate to Gravity Flow ehaviour through Industrial Proessing Lines A typial industrial powder proessing line will inlude several storage vessels (e.g. bins, bunkers,
Measurement of Powder Flow Properties that relate to Gravity Flow ehaviour through Industrial Proessing Lines A typial industrial powder proessing line will inlude several storage vessels (e.g. bins, bunkers,
Chapter 1: Introduction
 Chapter 1: Introdution 1.1 Pratial olumn base details in steel strutures 1.1.1 Pratial olumn base details Every struture must transfer vertial and lateral loads to the supports. In some ases, beams or
Chapter 1: Introdution 1.1 Pratial olumn base details in steel strutures 1.1.1 Pratial olumn base details Every struture must transfer vertial and lateral loads to the supports. In some ases, beams or
SHAFTS: TORSION LOADING AND DEFORMATION
 ECURE hird Edition SHAFS: ORSION OADING AND DEFORMAION A. J. Clark Shool of Engineering Department of Civil and Environmental Engineering 6 Chapter 3.1-3.5 by Dr. Ibrahim A. Assakkaf SPRING 2003 ENES 220
ECURE hird Edition SHAFS: ORSION OADING AND DEFORMAION A. J. Clark Shool of Engineering Department of Civil and Environmental Engineering 6 Chapter 3.1-3.5 by Dr. Ibrahim A. Assakkaf SPRING 2003 ENES 220
Explanatory Examples on Indian Seismic Code IS 1893 (Part I)
") Doument No. :: IITK-GSDMA-EQ1-V.0 inal Report :: A - Earthquake Codes IITK-GSDMA Projet on Building Codes Explanatory Examples on Indian Seismi Code IS 1893 (Part I) by Dr. Sudhir K Jain Department of
Doument No. :: IITK-GSDMA-EQ1-V.0 inal Report :: A - Earthquake Codes IITK-GSDMA Projet on Building Codes Explanatory Examples on Indian Seismi Code IS 1893 (Part I) by Dr. Sudhir K Jain Department of
Earthquake Loss for Reinforced Concrete Building Structures Before and After Fire damage
 Earthquake Loss for Reinfored Conrete Building Strutures Before and After Fire damage Pai-Mei LIU, Yi-Hsuan Tu and Maw-Shyong SHEU 3 ABSTRACT The purpose of this paper is to propose a rational analytial
Earthquake Loss for Reinfored Conrete Building Strutures Before and After Fire damage Pai-Mei LIU, Yi-Hsuan Tu and Maw-Shyong SHEU 3 ABSTRACT The purpose of this paper is to propose a rational analytial
The following excerpt are pages from the North American Product Technical Guide, Volume 2: Anchor Fastening, Edition 16.
 The following exerpt are pages from the North Amerian Produt Tehnial Guide, Volume 2: Anhor Fastening, Edition 16. Please refer to the publiation in its entirety for omplete details on this produt inluding
The following exerpt are pages from the North Amerian Produt Tehnial Guide, Volume 2: Anhor Fastening, Edition 16. Please refer to the publiation in its entirety for omplete details on this produt inluding
BEARING CAPACITY OF SOIL
 BEARING CAPACITY OF SOIL Dr. S. K. Prasad Professor of Civil Engineering S. J. College of Engineering, Mysore 7.0 Syllabus. Definition of ultimate, net and safe bearing apaities, Allowable bearing pressure
BEARING CAPACITY OF SOIL Dr. S. K. Prasad Professor of Civil Engineering S. J. College of Engineering, Mysore 7.0 Syllabus. Definition of ultimate, net and safe bearing apaities, Allowable bearing pressure
REINFORCED CONCRETE BEAMS: T-BEAMS AND DOUBLY REINFORCED BEAMS
 CHAPTER Reinored Conrete Design Fith Edition REINFORCED CONCRETE BEAMS: T-BEAMS AND DOUBLY REINFORCED BEAMS A. J. Clark Shool o Engineering Department o Civil and Environmental Engineering Part I Conrete
CHAPTER Reinored Conrete Design Fith Edition REINFORCED CONCRETE BEAMS: T-BEAMS AND DOUBLY REINFORCED BEAMS A. J. Clark Shool o Engineering Department o Civil and Environmental Engineering Part I Conrete
A transverse strip of the deck is assumed to support the truck axle loads. Shear and fatigue of the reinforcement need not be investigated.
 Design Step 4 Design Step 4.1 DECK SLAB DESIGN In addition to designing the deck for dead and live loads at the strength limit state, the AASHTO-LRFD specifications require checking the deck for vehicular
Design Step 4 Design Step 4.1 DECK SLAB DESIGN In addition to designing the deck for dead and live loads at the strength limit state, the AASHTO-LRFD specifications require checking the deck for vehicular
WATER CLOSET SUPPORTS TECHNICAL DATA
 WATER CLOSET SUPPORTS TECHNICAL DATA Smith engineers have developed an unusually omplete line of fixture supports for mounting all types of "off the floor" fixtures. Supports have been designed for water
WATER CLOSET SUPPORTS TECHNICAL DATA Smith engineers have developed an unusually omplete line of fixture supports for mounting all types of "off the floor" fixtures. Supports have been designed for water
REINFORCED CONCRETE. Reinforced Concrete Design. A Fundamental Approach - Fifth Edition. Walls are generally used to provide lateral support for:
 HANDOUT REINFORCED CONCRETE Reinforced Concrete Design A Fundamental Approach - Fifth Edition RETAINING WALLS Fifth Edition A. J. Clark School of Engineering Department of Civil and Environmental Engineering
HANDOUT REINFORCED CONCRETE Reinforced Concrete Design A Fundamental Approach - Fifth Edition RETAINING WALLS Fifth Edition A. J. Clark School of Engineering Department of Civil and Environmental Engineering
SECTION 5 ANALYSIS OF CONTINUOUS SPANS DEVELOPED BY THE PTI EDC-130 EDUCATION COMMITTEE LEAD AUTHOR: BRYAN ALLRED
 SECTION 5 ANALYSIS OF CONTINUOUS SPANS DEVELOPED BY THE PTI EDC-130 EDUCATION COMMITTEE LEAD AUTHOR: BRYAN ALLRED NOTE: MOMENT DIAGRAM CONVENTION In PT design, it is preferable to draw moment diagrams
SECTION 5 ANALYSIS OF CONTINUOUS SPANS DEVELOPED BY THE PTI EDC-130 EDUCATION COMMITTEE LEAD AUTHOR: BRYAN ALLRED NOTE: MOMENT DIAGRAM CONVENTION In PT design, it is preferable to draw moment diagrams
Long-term serviceability of the structure Minimal maintenance requirements Economical construction Improved aesthetics and safety considerations
 Design Step 7.1 INTEGRAL ABUTMENT DESIGN General considerations and common practices Integral abutments are used to eliminate expansion joints at the end of a bridge. They often result in Jointless Bridges
Design Step 7.1 INTEGRAL ABUTMENT DESIGN General considerations and common practices Integral abutments are used to eliminate expansion joints at the end of a bridge. They often result in Jointless Bridges
protection p1ann1ng report
 f1re~~ protetion p1ann1ng report BUILDING CONSTRUCTION INFORMATION FROM THE CONCRETE AND MASONRY INDUSTRIES Signifiane of Fire Ratings for Building Constrution NO. 3 OF A SERIES The use of fire-resistive
f1re~~ protetion p1ann1ng report BUILDING CONSTRUCTION INFORMATION FROM THE CONCRETE AND MASONRY INDUSTRIES Signifiane of Fire Ratings for Building Constrution NO. 3 OF A SERIES The use of fire-resistive
Impact Simulation of Extreme Wind Generated Missiles on Radioactive Waste Storage Facilities
 Impat Simulation of Extreme Wind Generated issiles on Radioative Waste Storage Failities G. Barbella Sogin S.p.A. Via Torino 6 00184 Rome (Italy), barbella@sogin.it Abstrat: The strutural design of temporary
Impat Simulation of Extreme Wind Generated issiles on Radioative Waste Storage Failities G. Barbella Sogin S.p.A. Via Torino 6 00184 Rome (Italy), barbella@sogin.it Abstrat: The strutural design of temporary
Chapter 5 Single Phase Systems
 Chapter 5 Single Phase Systems Chemial engineering alulations rely heavily on the availability of physial properties of materials. There are three ommon methods used to find these properties. These inlude
Chapter 5 Single Phase Systems Chemial engineering alulations rely heavily on the availability of physial properties of materials. There are three ommon methods used to find these properties. These inlude
THE PERFORMANCE OF TRANSIT TIME FLOWMETERS IN HEATED GAS MIXTURES
 Proeedings of FEDSM 98 998 ASME Fluids Engineering Division Summer Meeting June 2-25, 998 Washington DC FEDSM98-529 THE PERFORMANCE OF TRANSIT TIME FLOWMETERS IN HEATED GAS MIXTURES John D. Wright Proess
Proeedings of FEDSM 98 998 ASME Fluids Engineering Division Summer Meeting June 2-25, 998 Washington DC FEDSM98-529 THE PERFORMANCE OF TRANSIT TIME FLOWMETERS IN HEATED GAS MIXTURES John D. Wright Proess
Introduction to LRFD, Loads and Loads Distribution
 Introduction to LRFD, Loads and Loads Distribution Thomas K. Saad, P.E. Federal Highway Administration Chicago, IL Evolution of Design Methodologies SLD Methodology: (f t ) D + (f t ) L 0.55F y, or 1.82(f
Introduction to LRFD, Loads and Loads Distribution Thomas K. Saad, P.E. Federal Highway Administration Chicago, IL Evolution of Design Methodologies SLD Methodology: (f t ) D + (f t ) L 0.55F y, or 1.82(f
Chapter 1 Microeconomics of Consumer Theory
 Chapter 1 Miroeonomis of Consumer Theory The two broad ategories of deision-makers in an eonomy are onsumers and firms. Eah individual in eah of these groups makes its deisions in order to ahieve some
Chapter 1 Miroeonomis of Consumer Theory The two broad ategories of deision-makers in an eonomy are onsumers and firms. Eah individual in eah of these groups makes its deisions in order to ahieve some
A novel active mass damper for vibration control of bridges
 IABMAS 08, International Conferene on Bridge Maintenane, Safety and Management, 3-7 July 008, Seoul, Korea A novel ative mass damper for vibration ontrol of bridges U. Starossek & J. Sheller Strutural
IABMAS 08, International Conferene on Bridge Maintenane, Safety and Management, 3-7 July 008, Seoul, Korea A novel ative mass damper for vibration ontrol of bridges U. Starossek & J. Sheller Strutural
State of Maryland Participation Agreement for Pre-Tax and Roth Retirement Savings Accounts
 State of Maryland Partiipation Agreement for Pre-Tax and Roth Retirement Savings Aounts DC-4531 (08/2015) For help, please all 1-800-966-6355 www.marylandd.om 1 Things to Remember Complete all of the setions
State of Maryland Partiipation Agreement for Pre-Tax and Roth Retirement Savings Aounts DC-4531 (08/2015) For help, please all 1-800-966-6355 www.marylandd.om 1 Things to Remember Complete all of the setions
User s Guide VISFIT: a computer tool for the measurement of intrinsic viscosities
 File:UserVisfit_2.do User s Guide VISFIT: a omputer tool for the measurement of intrinsi visosities Version 2.a, September 2003 From: Multiple Linear Least-Squares Fits with a Common Interept: Determination
File:UserVisfit_2.do User s Guide VISFIT: a omputer tool for the measurement of intrinsi visosities Version 2.a, September 2003 From: Multiple Linear Least-Squares Fits with a Common Interept: Determination
arxiv:astro-ph/0304006v2 10 Jun 2003 Theory Group, MS 50A-5101 Lawrence Berkeley National Laboratory One Cyclotron Road Berkeley, CA 94720 USA
 LBNL-52402 Marh 2003 On the Speed of Gravity and the v/ Corretions to the Shapiro Time Delay Stuart Samuel 1 arxiv:astro-ph/0304006v2 10 Jun 2003 Theory Group, MS 50A-5101 Lawrene Berkeley National Laboratory
LBNL-52402 Marh 2003 On the Speed of Gravity and the v/ Corretions to the Shapiro Time Delay Stuart Samuel 1 arxiv:astro-ph/0304006v2 10 Jun 2003 Theory Group, MS 50A-5101 Lawrene Berkeley National Laboratory
6. Fasteners and Fastening methods. Introduction. Fastener types. Fastener application. Screw thread terminology. Screw thread terminology (Fig. 6.
 6. Fasteners and Fastening methods Ojetives Desrie many types of fastening systems and their uses. Understand priniples of stress area, pith diameters, and thread types and forms. Understand different
6. Fasteners and Fastening methods Ojetives Desrie many types of fastening systems and their uses. Understand priniples of stress area, pith diameters, and thread types and forms. Understand different
10.1 The Lorentz force law
 Sott Hughes 10 Marh 2005 Massahusetts Institute of Tehnology Department of Physis 8.022 Spring 2004 Leture 10: Magneti fore; Magneti fields; Ampere s law 10.1 The Lorentz fore law Until now, we have been
Sott Hughes 10 Marh 2005 Massahusetts Institute of Tehnology Department of Physis 8.022 Spring 2004 Leture 10: Magneti fore; Magneti fields; Ampere s law 10.1 The Lorentz fore law Until now, we have been
Capacity at Unsignalized Two-Stage Priority Intersections
 Capaity at Unsignalized Two-Stage Priority Intersetions by Werner Brilon and Ning Wu Abstrat The subjet of this paper is the apaity of minor-street traffi movements aross major divided four-lane roadways
Capaity at Unsignalized Two-Stage Priority Intersetions by Werner Brilon and Ning Wu Abstrat The subjet of this paper is the apaity of minor-street traffi movements aross major divided four-lane roadways
Electrician'sMathand BasicElectricalFormulas
 Eletriian'sMathand BasiEletrialFormulas MikeHoltEnterprises,In. 1.888.NEC.CODE www.mikeholt.om Introdution Introdution This PDF is a free resoure from Mike Holt Enterprises, In. It s Unit 1 from the Eletrial
Eletriian'sMathand BasiEletrialFormulas MikeHoltEnterprises,In. 1.888.NEC.CODE www.mikeholt.om Introdution Introdution This PDF is a free resoure from Mike Holt Enterprises, In. It s Unit 1 from the Eletrial
INCOME TAX WITHHOLDING GUIDE FOR EMPLOYERS
 Virginia Department of Taxation INCOME TAX WITHHOLDING GUIDE FOR EMPLOYERS www.tax.virginia.gov 2614086 Rev. 07/14 * Table of Contents Introdution... 1 Important... 1 Where to Get Assistane... 1 Online
Virginia Department of Taxation INCOME TAX WITHHOLDING GUIDE FOR EMPLOYERS www.tax.virginia.gov 2614086 Rev. 07/14 * Table of Contents Introdution... 1 Important... 1 Where to Get Assistane... 1 Online
INCOME TAX WITHHOLDING GUIDE FOR EMPLOYERS
 Virginia Department of Taxation INCOME TAX WITHHOLDING GUIDE FOR EMPLOYERS www.tax.virginia.gov 2614086 Rev. 01/16 Table of Contents Introdution... 1 Important... 1 Where to Get Assistane... 1 Online File
Virginia Department of Taxation INCOME TAX WITHHOLDING GUIDE FOR EMPLOYERS www.tax.virginia.gov 2614086 Rev. 01/16 Table of Contents Introdution... 1 Important... 1 Where to Get Assistane... 1 Online File
F220 Series. Installation Instructions. Photoelectric Smoke/Heat Detectors
 F0 Series EN Installation Instrutions Photoeletri Smoke/Heat Detetors F0 Series Installation Instrutions.0 General Information EN.0 General Information. F0-B6 Series Bases Use with the F0 Series Heat and
F0 Series EN Installation Instrutions Photoeletri Smoke/Heat Detetors F0 Series Installation Instrutions.0 General Information EN.0 General Information. F0-B6 Series Bases Use with the F0 Series Heat and
Technical Data Manual Model Nos. and pricing: see Price List
 Tehnial Data Manual Model Nos. and priing: see Prie List Vitoell 100-V CVAA and CVA Series Indiret-fired domesti hot water storage tank 42 USG to 119 USG (160 L to 450 L) apaity Indiret-fired domesti hot
Tehnial Data Manual Model Nos. and priing: see Prie List Vitoell 100-V CVAA and CVA Series Indiret-fired domesti hot water storage tank 42 USG to 119 USG (160 L to 450 L) apaity Indiret-fired domesti hot
SLAB DESIGN EXAMPLE. Deck Design (AASHTO LRFD 9.7.1) TYPICAL SECTION. County: Any Hwy: Any Design: BRG Date: 7/2010
 TYPICAL SECTION. County: Any Hwy: Any Design: BRG Date: 7/2010") County: Any Hwy: Any Design: BRG Date: 7/2010 SLAB DESIGN EXAMPLE Design example is in accordance with the AASHTO LRFD Bridge Design Specifications, 5th Ed. (2010) as prescribed by TxDOT Bridge Design
County: Any Hwy: Any Design: BRG Date: 7/2010 SLAB DESIGN EXAMPLE Design example is in accordance with the AASHTO LRFD Bridge Design Specifications, 5th Ed. (2010) as prescribed by TxDOT Bridge Design
Performance Rating of Unitary Air-Conditioning & Air-Source Heat Pump Equipment
 ANSI/AHRI Standard 210/240 with Addenda 1 and 2 (formerly ARI Standard 210/240) 2008 Standard for Performane Rating of Unitary Air-Conditioning & Air-Soure Heat Pump Equipment Approved by ANSI in Deember
ANSI/AHRI Standard 210/240 with Addenda 1 and 2 (formerly ARI Standard 210/240) 2008 Standard for Performane Rating of Unitary Air-Conditioning & Air-Soure Heat Pump Equipment Approved by ANSI in Deember
Classical Electromagnetic Doppler Effect Redefined. Copyright 2014 Joseph A. Rybczyk
 Classial Eletromagneti Doppler Effet Redefined Copyright 04 Joseph A. Rybzyk Abstrat The lassial Doppler Effet formula for eletromagneti waves is redefined to agree with the fundamental sientifi priniples
Classial Eletromagneti Doppler Effet Redefined Copyright 04 Joseph A. Rybzyk Abstrat The lassial Doppler Effet formula for eletromagneti waves is redefined to agree with the fundamental sientifi priniples
SECTION 3 DESIGN OF POST- TENSIONED COMPONENTS FOR FLEXURE
 SECTION 3 DESIGN OF POST- TENSIONED COMPONENTS FOR FLEXURE DEVELOPED BY THE PTI EDC-130 EDUCATION COMMITTEE LEAD AUTHOR: TREY HAMILTON, UNIVERSITY OF FLORIDA NOTE: MOMENT DIAGRAM CONVENTION In PT design,
SECTION 3 DESIGN OF POST- TENSIONED COMPONENTS FOR FLEXURE DEVELOPED BY THE PTI EDC-130 EDUCATION COMMITTEE LEAD AUTHOR: TREY HAMILTON, UNIVERSITY OF FLORIDA NOTE: MOMENT DIAGRAM CONVENTION In PT design,
HEAT CONDUCTION. q A q T
 HEAT CONDUCTION When a temperature gradient eist in a material, heat flows from the high temperature region to the low temperature region. The heat transfer mehanism is referred to as ondution and the
HEAT CONDUCTION When a temperature gradient eist in a material, heat flows from the high temperature region to the low temperature region. The heat transfer mehanism is referred to as ondution and the
Findings and Recommendations
 Contrating Methods and Administration Findings and Reommendations Finding 9-1 ESD did not utilize a formal written pre-qualifiations proess for seleting experiened design onsultants. ESD hose onsultants
Contrating Methods and Administration Findings and Reommendations Finding 9-1 ESD did not utilize a formal written pre-qualifiations proess for seleting experiened design onsultants. ESD hose onsultants
Computational Analysis of Two Arrangements of a Central Ground-Source Heat Pump System for Residential Buildings
 Computational Analysis of Two Arrangements of a Central Ground-Soure Heat Pump System for Residential Buildings Abstrat Ehab Foda, Ala Hasan, Kai Sirén Helsinki University of Tehnology, HVAC Tehnology,
Computational Analysis of Two Arrangements of a Central Ground-Soure Heat Pump System for Residential Buildings Abstrat Ehab Foda, Ala Hasan, Kai Sirén Helsinki University of Tehnology, HVAC Tehnology,
1.3 Complex Numbers; Quadratic Equations in the Complex Number System*
 04 CHAPTER Equations and Inequalities Explaining Conepts: Disussion and Writing 7. Whih of the following pairs of equations are equivalent? Explain. x 2 9; x 3 (b) x 29; x 3 () x - 2x - 22 x - 2 2 ; x
04 CHAPTER Equations and Inequalities Explaining Conepts: Disussion and Writing 7. Whih of the following pairs of equations are equivalent? Explain. x 2 9; x 3 (b) x 29; x 3 () x - 2x - 22 x - 2 2 ; x
CH. 2 LOADS ON BUILDINGS
 CH. 2 LOADS ON BUILDINGS GRAVITY LOADS Dead loads Vertical loads due to weight of building and any permanent equipment Dead loads of structural elements cannot be readily determined b/c weight depends
CH. 2 LOADS ON BUILDINGS GRAVITY LOADS Dead loads Vertical loads due to weight of building and any permanent equipment Dead loads of structural elements cannot be readily determined b/c weight depends
REDUCTION FACTOR OF FEEDING LINES THAT HAVE A CABLE AND AN OVERHEAD SECTION
 C I E 17 th International Conferene on Eletriity istriution Barelona, 1-15 May 003 EUCTION FACTO OF FEEING LINES THAT HAVE A CABLE AN AN OVEHEA SECTION Ljuivoje opovi J.. Elektrodistriuija - Belgrade -
C I E 17 th International Conferene on Eletriity istriution Barelona, 1-15 May 003 EUCTION FACTO OF FEEING LINES THAT HAVE A CABLE AN AN OVEHEA SECTION Ljuivoje opovi J.. Elektrodistriuija - Belgrade -
Suggested Answers, Problem Set 5 Health Economics
 Suggested Answers, Problem Set 5 Health Eonomis Bill Evans Spring 2013 1. The graph is at the end of the handout. Fluoridated water strengthens teeth and redues inidene of avities. As a result, at all
Suggested Answers, Problem Set 5 Health Eonomis Bill Evans Spring 2013 1. The graph is at the end of the handout. Fluoridated water strengthens teeth and redues inidene of avities. As a result, at all
SECTION 3 DESIGN OF POST TENSIONED COMPONENTS FOR FLEXURE
 SECTION 3 DESIGN OF POST TENSIONED COMPONENTS FOR FLEXURE DEVELOPED BY THE PTI EDC-130 EDUCATION COMMITTEE LEAD AUTHOR: TREY HAMILTON, UNIVERSITY OF FLORIDA NOTE: MOMENT DIAGRAM CONVENTION In PT design,
SECTION 3 DESIGN OF POST TENSIONED COMPONENTS FOR FLEXURE DEVELOPED BY THE PTI EDC-130 EDUCATION COMMITTEE LEAD AUTHOR: TREY HAMILTON, UNIVERSITY OF FLORIDA NOTE: MOMENT DIAGRAM CONVENTION In PT design,
Index 20010 Series Prestressed Florida-I Beams (Rev. 07/12)
") Index 20010 Series Prestressed Florida-I Beams (Rev. 07/12) Design Criteria AASHTO LRFD Bridge Design Specifications, 6th Edition; Structures Detailing Manual (SDM); Structures Design Guidelines (SDG)
Index 20010 Series Prestressed Florida-I Beams (Rev. 07/12) Design Criteria AASHTO LRFD Bridge Design Specifications, 6th Edition; Structures Detailing Manual (SDM); Structures Design Guidelines (SDG)
Relativity in the Global Positioning System
 Relativity in the Global Positioning System Neil Ashby Department of Physis,UCB 390 University of Colorado, Boulder, CO 80309-00390 NIST Affiliate Email: ashby@boulder.nist.gov July 0, 006 AAPT workshop
Relativity in the Global Positioning System Neil Ashby Department of Physis,UCB 390 University of Colorado, Boulder, CO 80309-00390 NIST Affiliate Email: ashby@boulder.nist.gov July 0, 006 AAPT workshop
Impedance Method for Leak Detection in Zigzag Pipelines
 10.478/v10048-010-0036-0 MEASUREMENT SCIENCE REVIEW, Volume 10, No. 6, 010 Impedane Method for Leak Detetion in igzag Pipelines A. Lay-Ekuakille 1, P. Vergallo 1, A. Trotta 1 Dipartimento d Ingegneria
10.478/v10048-010-0036-0 MEASUREMENT SCIENCE REVIEW, Volume 10, No. 6, 010 Impedane Method for Leak Detetion in igzag Pipelines A. Lay-Ekuakille 1, P. Vergallo 1, A. Trotta 1 Dipartimento d Ingegneria
HOW TO CALCULATE PRESSURE ANYWHERE IN A PUMP SYSTEM? Jacques Chaurette p. eng. www.lightmypump.com April 2003
 HOW TO CALCULATE PRESSURE ANYWHERE IN A PUMP SYSTEM? Jaques Chaurette p. en. www.lihtmypump.om April 003 Synopsis Calulatin the total head of the pump is not the only task of the pump system desiner. Often
HOW TO CALCULATE PRESSURE ANYWHERE IN A PUMP SYSTEM? Jaques Chaurette p. en. www.lihtmypump.om April 003 Synopsis Calulatin the total head of the pump is not the only task of the pump system desiner. Often
protection p1ann1ng report
 ( f1re protetion p1ann1ng report I BUILDING CONSTRUCTION INFORMATION FROM THE CONCRETE AND MASONRY INDUSTRIES NO. 15 OF A SERIES A Comparison of Insurane and Constrution Costs for Low-Rise Multifamily
( f1re protetion p1ann1ng report I BUILDING CONSTRUCTION INFORMATION FROM THE CONCRETE AND MASONRY INDUSTRIES NO. 15 OF A SERIES A Comparison of Insurane and Constrution Costs for Low-Rise Multifamily
VOLTAGE CONTROL WITH SHUNT CAPACITANCE ON RADIAL DISTRIBUTION LINE WITH HIGH R/X FACTOR. A Thesis by. Hong-Tuan Nguyen Vu
 VOLTAGE CONTROL WITH SHUNT CAPACITANCE ON RADIAL DISTRIBUTION LINE WITH HIGH R/X FACTOR A Thesis by Hong-Tuan Nguyen Vu Eletrial Engineer, Polytehni University of HCMC, 1993 Submitted to the College of
VOLTAGE CONTROL WITH SHUNT CAPACITANCE ON RADIAL DISTRIBUTION LINE WITH HIGH R/X FACTOR A Thesis by Hong-Tuan Nguyen Vu Eletrial Engineer, Polytehni University of HCMC, 1993 Submitted to the College of
3.2 DEFINITIONS, cont. Revise or add the following definitions::
 CALIFORNIA AMENDMENTS TO AASHTO LRFD BRIDGE DESIGN SPECIFICATIONS THIRD EDITION W/ INTERIMS THRU 2006 _3-2A, 3-3A 3.2 DEFINITIONS, cont. Revise or add the following definitions:: Permanent Loads Loads
CALIFORNIA AMENDMENTS TO AASHTO LRFD BRIDGE DESIGN SPECIFICATIONS THIRD EDITION W/ INTERIMS THRU 2006 _3-2A, 3-3A 3.2 DEFINITIONS, cont. Revise or add the following definitions:: Permanent Loads Loads
A Three-Hybrid Treatment Method of the Compressor's Characteristic Line in Performance Prediction of Power Systems
 A Three-Hybrid Treatment Method of the Compressor's Charateristi Line in Performane Predition of Power Systems A Three-Hybrid Treatment Method of the Compressor's Charateristi Line in Performane Predition
A Three-Hybrid Treatment Method of the Compressor's Charateristi Line in Performane Predition of Power Systems A Three-Hybrid Treatment Method of the Compressor's Charateristi Line in Performane Predition
10 UNSTEADY FLOW IN OPEN CHANNELS
 0 UNTEY FLOW IN OEN CHNNEL 0. Introdution Unsteady flow in open hannels differs from that in losed onduits in that the eistene of a free surfae allows the flow ross-setion to freely hange, a fator whih
0 UNTEY FLOW IN OEN CHNNEL 0. Introdution Unsteady flow in open hannels differs from that in losed onduits in that the eistene of a free surfae allows the flow ross-setion to freely hange, a fator whih
Chapter 12 LOADS AND LOAD FACTORS NDOT STRUCTURES MANUAL
 Chapter 12 LOADS AND LOAD FACTORS NDOT STRUCTURES MANUAL September 2008 Table of Contents Section Page 12.1 GENERAL... 12-1 12.1.1 Load Definitions... 12-1 12.1.1.1 Permanent Loads... 12-1 12.1.1.2 Transient
Chapter 12 LOADS AND LOAD FACTORS NDOT STRUCTURES MANUAL September 2008 Table of Contents Section Page 12.1 GENERAL... 12-1 12.1.1 Load Definitions... 12-1 12.1.1.1 Permanent Loads... 12-1 12.1.1.2 Transient
Effects of Inter-Coaching Spacing on Aerodynamic Noise Generation Inside High-speed Trains
 Effets of Inter-Coahing Spaing on Aerodynami Noise Generation Inside High-speed Trains 1 J. Ryu, 1 J. Park*, 2 C. Choi, 1 S. Song Hanyang University, Seoul, South Korea 1 ; Korea Railroad Researh Institute,
Effets of Inter-Coahing Spaing on Aerodynami Noise Generation Inside High-speed Trains 1 J. Ryu, 1 J. Park*, 2 C. Choi, 1 S. Song Hanyang University, Seoul, South Korea 1 ; Korea Railroad Researh Institute,
Customer Reporting for SaaS Applications. Domain Basics. Managing my Domain
 Produtivity Marketpla e Software as a Servie Invoiing Ordering Domains Customer Reporting for SaaS Appliations Domain Basis Managing my Domain Managing Domains Helpful Resoures Managing my Domain If you
Produtivity Marketpla e Software as a Servie Invoiing Ordering Domains Customer Reporting for SaaS Appliations Domain Basis Managing my Domain Managing Domains Helpful Resoures Managing my Domain If you
Agile ALM White Paper: Redefining ALM with Five Key Practices
 Agile ALM White Paper: Redefining ALM with Five Key Praties by Ethan Teng, Cyndi Mithell and Chad Wathington 2011 ThoughtWorks ln. All rights reserved www.studios.thoughtworks.om Introdution The pervasiveness
Agile ALM White Paper: Redefining ALM with Five Key Praties by Ethan Teng, Cyndi Mithell and Chad Wathington 2011 ThoughtWorks ln. All rights reserved www.studios.thoughtworks.om Introdution The pervasiveness
Steel Bridge Design Handbook
 U.S. Department of Transportation Federal Highway Administration Steel Bridge Design Handbook Loads and Load Combinations Publication No. FHWA-IF-12-052 - Vol. 7 November 2012 Notice This document is disseminated
U.S. Department of Transportation Federal Highway Administration Steel Bridge Design Handbook Loads and Load Combinations Publication No. FHWA-IF-12-052 - Vol. 7 November 2012 Notice This document is disseminated
Reinforced Concrete Design
 FALL 2013 C C Reinforced Concrete Design CIVL 4135 ii 1 Chapter 1. Introduction 1.1. Reading Assignment Chapter 1 Sections 1.1 through 1.8 of text. 1.2. Introduction In the design and analysis of reinforced
FALL 2013 C C Reinforced Concrete Design CIVL 4135 ii 1 Chapter 1. Introduction 1.1. Reading Assignment Chapter 1 Sections 1.1 through 1.8 of text. 1.2. Introduction In the design and analysis of reinforced
Static Fairness Criteria in Telecommunications
 Teknillinen Korkeakoulu ERIKOISTYÖ Teknillisen fysiikan koulutusohjelma 92002 Mat-208 Sovelletun matematiikan erikoistyöt Stati Fairness Criteria in Teleommuniations Vesa Timonen, e-mail: vesatimonen@hutfi
Teknillinen Korkeakoulu ERIKOISTYÖ Teknillisen fysiikan koulutusohjelma 92002 Mat-208 Sovelletun matematiikan erikoistyöt Stati Fairness Criteria in Teleommuniations Vesa Timonen, e-mail: vesatimonen@hutfi
Channel Assignment Strategies for Cellular Phone Systems
 Channel Assignment Strategies for Cellular Phone Systems Wei Liu Yiping Han Hang Yu Zhejiang University Hangzhou, P. R. China Contat: wliu5@ie.uhk.edu.hk 000 Mathematial Contest in Modeling (MCM) Meritorious
Channel Assignment Strategies for Cellular Phone Systems Wei Liu Yiping Han Hang Yu Zhejiang University Hangzhou, P. R. China Contat: wliu5@ie.uhk.edu.hk 000 Mathematial Contest in Modeling (MCM) Meritorious
Safe & Sound Bridge Terminology
 Safe & Sound Bridge Terminology Abutment A retaining wall supporting the ends of a bridge, and, in general, retaining or supporting the approach embankment. Approach The part of the bridge that carries
Safe & Sound Bridge Terminology Abutment A retaining wall supporting the ends of a bridge, and, in general, retaining or supporting the approach embankment. Approach The part of the bridge that carries
Masters Thesis- Criticality Alarm System Design Guide with Accompanying Alarm System Development for the Radioisotope Production L
 PNNL-18348 Prepared for the U.S. Department of Energy under Contrat DE-AC05-76RL01830 Masters Thesis- Critiality Alarm System Design Guide with Aompanying Alarm System Development for the Radioisotope
PNNL-18348 Prepared for the U.S. Department of Energy under Contrat DE-AC05-76RL01830 Masters Thesis- Critiality Alarm System Design Guide with Aompanying Alarm System Development for the Radioisotope
Earth Pressure and Retaining Wall Basics for Non-Geotechnical Engineers
 PDHonline Course C155 (2 PDH) Earth Pressure and Retaining Wall Basics for Non-Geotechnical Engineers Instructor: Richard P. Weber, P.E. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA
PDHonline Course C155 (2 PDH) Earth Pressure and Retaining Wall Basics for Non-Geotechnical Engineers Instructor: Richard P. Weber, P.E. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA
Neural network-based Load Balancing and Reactive Power Control by Static VAR Compensator
 nternational Journal of Computer and Eletrial Engineering, Vol. 1, No. 1, April 2009 Neural network-based Load Balaning and Reative Power Control by Stati VAR Compensator smail K. Said and Marouf Pirouti
nternational Journal of Computer and Eletrial Engineering, Vol. 1, No. 1, April 2009 Neural network-based Load Balaning and Reative Power Control by Stati VAR Compensator smail K. Said and Marouf Pirouti
AUDITING COST OVERRUN CLAIMS *
 AUDITING COST OVERRUN CLAIMS * David Pérez-Castrillo # University of Copenhagen & Universitat Autònoma de Barelona Niolas Riedinger ENSAE, Paris Abstrat: We onsider a ost-reimbursement or a ost-sharing
AUDITING COST OVERRUN CLAIMS * David Pérez-Castrillo # University of Copenhagen & Universitat Autònoma de Barelona Niolas Riedinger ENSAE, Paris Abstrat: We onsider a ost-reimbursement or a ost-sharing
Open and Extensible Business Process Simulator
 UNIVERSITY OF TARTU FACULTY OF MATHEMATICS AND COMPUTER SCIENCE Institute of Computer Siene Karl Blum Open and Extensible Business Proess Simulator Master Thesis (30 EAP) Supervisors: Luiano Garía-Bañuelos,
UNIVERSITY OF TARTU FACULTY OF MATHEMATICS AND COMPUTER SCIENCE Institute of Computer Siene Karl Blum Open and Extensible Business Proess Simulator Master Thesis (30 EAP) Supervisors: Luiano Garía-Bañuelos,
TS150 Visible (exposed) fixing with screws on a timber sub-frame
 fixing with screws on a timber sub-frame") TS150 Visile (exposed) fixing with srews on a timer su-frame This system offers a ost effetive solution for installing Trespa Meteon panels in a large variety of panel dimensions. Trespa Meteon panels
TS150 Visile (exposed) fixing with srews on a timer su-frame This system offers a ost effetive solution for installing Trespa Meteon panels in a large variety of panel dimensions. Trespa Meteon panels
Retirement Option Election Form with Partial Lump Sum Payment
 Offie of the New York State Comptroller New York State and Loal Retirement System Employees Retirement System Polie and Fire Retirement System 110 State Street, Albany, New York 12244-0001 Retirement Option
Offie of the New York State Comptroller New York State and Loal Retirement System Employees Retirement System Polie and Fire Retirement System 110 State Street, Albany, New York 12244-0001 Retirement Option
SPECIFICATIONS, LOADS, AND METHODS OF DESIGN
 CHAPTER Structural Steel Design LRFD Method Third Edition SPECIFICATIONS, LOADS, AND METHODS OF DESIGN A. J. Clark School of Engineering Department of Civil and Environmental Engineering Part II Structural
CHAPTER Structural Steel Design LRFD Method Third Edition SPECIFICATIONS, LOADS, AND METHODS OF DESIGN A. J. Clark School of Engineering Department of Civil and Environmental Engineering Part II Structural
Henley Business School at Univ of Reading. Pre-Experience Postgraduate Programmes Chartered Institute of Personnel and Development (CIPD)
") MS in International Human Resoure Management For students entering in 2012/3 Awarding Institution: Teahing Institution: Relevant QAA subjet Benhmarking group(s): Faulty: Programme length: Date of speifiation:
MS in International Human Resoure Management For students entering in 2012/3 Awarding Institution: Teahing Institution: Relevant QAA subjet Benhmarking group(s): Faulty: Programme length: Date of speifiation:
DSP-I DSP-I DSP-I DSP-I
 DSP-I DSP-I DSP-I DSP-I Digital Signal Proessing I (8-79) Fall Semester, 005 IIR FILER DESIG EXAMPLE hese notes summarize the design proedure for IIR filters as disussed in lass on ovember. Introdution:
DSP-I DSP-I DSP-I DSP-I Digital Signal Proessing I (8-79) Fall Semester, 005 IIR FILER DESIG EXAMPLE hese notes summarize the design proedure for IIR filters as disussed in lass on ovember. Introdution:
VOLUME 13, ARTICLE 5, PAGES 117-142 PUBLISHED 05 OCTOBER 2005 DOI: 10.4054/DemRes.2005.13.
 Demographi Researh a free, expedited, online journal of peer-reviewed researh and ommentary in the population sienes published by the Max Plank Institute for Demographi Researh Konrad-Zuse Str. 1, D-157
Demographi Researh a free, expedited, online journal of peer-reviewed researh and ommentary in the population sienes published by the Max Plank Institute for Demographi Researh Konrad-Zuse Str. 1, D-157
Granular Problem Solving and Software Engineering
 Granular Problem Solving and Software Engineering Haibin Zhu, Senior Member, IEEE Department of Computer Siene and Mathematis, Nipissing University, 100 College Drive, North Bay, Ontario, P1B 8L7, Canada
Granular Problem Solving and Software Engineering Haibin Zhu, Senior Member, IEEE Department of Computer Siene and Mathematis, Nipissing University, 100 College Drive, North Bay, Ontario, P1B 8L7, Canada
INTRODUCTION TO BEAMS
 CHAPTER Structural Steel Design LRFD Method INTRODUCTION TO BEAMS Third Edition A. J. Clark School of Engineering Department of Civil and Environmental Engineering Part II Structural Steel Design and Analysis
CHAPTER Structural Steel Design LRFD Method INTRODUCTION TO BEAMS Third Edition A. J. Clark School of Engineering Department of Civil and Environmental Engineering Part II Structural Steel Design and Analysis
Revista Brasileira de Ensino de Fsica, vol. 21, no. 4, Dezembro, 1999 469. Surface Charges and Electric Field in a Two-Wire
 Revista Brasileira de Ensino de Fsia, vol., no. 4, Dezembro, 999 469 Surfae Charges and Eletri Field in a Two-Wire Resistive Transmission Line A. K. T.Assis and A. J. Mania Instituto de Fsia Gleb Wataghin'
Revista Brasileira de Ensino de Fsia, vol., no. 4, Dezembro, 999 469 Surfae Charges and Eletri Field in a Two-Wire Resistive Transmission Line A. K. T.Assis and A. J. Mania Instituto de Fsia Gleb Wataghin'
A Holistic Method for Selecting Web Services in Design of Composite Applications
 A Holisti Method for Seleting Web Servies in Design of Composite Appliations Mārtiņš Bonders, Jānis Grabis Institute of Information Tehnology, Riga Tehnial University, 1 Kalu Street, Riga, LV 1658, Latvia,
A Holisti Method for Seleting Web Servies in Design of Composite Appliations Mārtiņš Bonders, Jānis Grabis Institute of Information Tehnology, Riga Tehnial University, 1 Kalu Street, Riga, LV 1658, Latvia,
Overhang Bracket Loading. Deck Issues: Design Perspective
 Deck Issues: Design Perspective Overhang Bracket Loading Deck overhangs and screed rails are generally supported on cantilever brackets during the deck pour These brackets produce an overturning couple
Deck Issues: Design Perspective Overhang Bracket Loading Deck overhangs and screed rails are generally supported on cantilever brackets during the deck pour These brackets produce an overturning couple
Structural Axial, Shear and Bending Moments
 Structural Axial, Shear and Bending Moments Positive Internal Forces Acting Recall from mechanics of materials that the internal forces P (generic axial), V (shear) and M (moment) represent resultants
Structural Axial, Shear and Bending Moments Positive Internal Forces Acting Recall from mechanics of materials that the internal forces P (generic axial), V (shear) and M (moment) represent resultants
Table of Contents. July 2015 12-1
 Table of Contents 12.1 General... 3 12.2 Abutment Types... 5 12.2.1 Full-Retaining... 5 12.2.2 Semi-Retaining... 6 12.2.3 Sill... 7 12.2.4 Spill-Through or Open... 7 12.2.5 Pile-Encased... 8 12.2.6 Special
Table of Contents 12.1 General... 3 12.2 Abutment Types... 5 12.2.1 Full-Retaining... 5 12.2.2 Semi-Retaining... 6 12.2.3 Sill... 7 12.2.4 Spill-Through or Open... 7 12.2.5 Pile-Encased... 8 12.2.6 Special
SEISMIC DESIGN. Various building codes consider the following categories for the analysis and design for earthquake loading:
 SEISMIC DESIGN Various building codes consider the following categories for the analysis and design for earthquake loading: 1. Seismic Performance Category (SPC), varies from A to E, depending on how the
SEISMIC DESIGN Various building codes consider the following categories for the analysis and design for earthquake loading: 1. Seismic Performance Category (SPC), varies from A to E, depending on how the
i e AT 8 of 1938 THE PERSONAL INJURIES (EMERGENCY PROVISIONS) ACT 1939
 ACT 1939") i e AT 8 of 1938 THE PERSONAL INJURIES (EMERGENCY PROVISIONS) ACT 1939 The Personal Injuries (Emergeny Provisions) At 1939 Index i e THE PERSONAL INJURIES (EMERGENCY PROVISIONS) ACT 1939 Index Setion
i e AT 8 of 1938 THE PERSONAL INJURIES (EMERGENCY PROVISIONS) ACT 1939 The Personal Injuries (Emergeny Provisions) At 1939 Index i e THE PERSONAL INJURIES (EMERGENCY PROVISIONS) ACT 1939 Index Setion
Chapter - 3 Design of Rectangular Beams and One-way Slabs
 Rectangular Beams and One-way Slabs Page 1 of 9 Chapter - 3 Design of Rectangular Beams and One-way Slabs 12 h A 12 strip in a simply supported one-way slab h b=12 L Rectangular Beams and One-way Slabs
Rectangular Beams and One-way Slabs Page 1 of 9 Chapter - 3 Design of Rectangular Beams and One-way Slabs 12 h A 12 strip in a simply supported one-way slab h b=12 L Rectangular Beams and One-way Slabs
Motorcycle Accident Reconstruction Part I - Physical Models
 Motoryle Aident Reonstrution Part I - Physial Models Oren Masory Wade Bartlett Bill Wright Dept. of Oean & Mehanial Engr. Mehanial Forensis Engineering Servies IPTM Florida Atlanti University 179 Cross
Motoryle Aident Reonstrution Part I - Physial Models Oren Masory Wade Bartlett Bill Wright Dept. of Oean & Mehanial Engr. Mehanial Forensis Engineering Servies IPTM Florida Atlanti University 179 Cross
PISTONLESS DUAL CHAMBER ROCKET FUEL PUMP
 39 th AIAA/ASE/SAE/ASEE Joint Propulsion Conferene and Exhibit AIAA 2003-4479 20-23 July 2003, Huntsville Alabama PISTONLESS DUAL CHABER ROCKET FUEL PUP Steve Harrington, Ph.D. Flometris, In. Solana Beah,
39 th AIAA/ASE/SAE/ASEE Joint Propulsion Conferene and Exhibit AIAA 2003-4479 20-23 July 2003, Huntsville Alabama PISTONLESS DUAL CHABER ROCKET FUEL PUP Steve Harrington, Ph.D. Flometris, In. Solana Beah,
Unit 12: Installing, Configuring and Administering Microsoft Server
 Unit 12: Installing, Configuring and Administering Mirosoft Server Learning Outomes A andidate following a programme of learning leading to this unit will be able to: Selet a suitable NOS to install for
Unit 12: Installing, Configuring and Administering Mirosoft Server Learning Outomes A andidate following a programme of learning leading to this unit will be able to: Selet a suitable NOS to install for
Deadline-based Escalation in Process-Aware Information Systems
 Deadline-based Esalation in Proess-Aware Information Systems Wil M.P. van der Aalst 1,2, Mihael Rosemann 2, Marlon Dumas 2 1 Department of Tehnology Management Eindhoven University of Tehnology, The Netherlands
Deadline-based Esalation in Proess-Aware Information Systems Wil M.P. van der Aalst 1,2, Mihael Rosemann 2, Marlon Dumas 2 1 Department of Tehnology Management Eindhoven University of Tehnology, The Netherlands
vulcanhammer.net This document downloaded from
 This document downloaded from vulcanhammer.net since 1997, your source for engineering information for the deep foundation and marine construction industries, and the historical site for Vulcan Iron Works
This document downloaded from vulcanhammer.net since 1997, your source for engineering information for the deep foundation and marine construction industries, and the historical site for Vulcan Iron Works
Design of reinforced concrete columns. Type of columns. Failure of reinforced concrete columns. Short column. Long column
 Design of reinforced concrete columns Type of columns Failure of reinforced concrete columns Short column Column fails in concrete crushed and bursting. Outward pressure break horizontal ties and bend
Design of reinforced concrete columns Type of columns Failure of reinforced concrete columns Short column Column fails in concrete crushed and bursting. Outward pressure break horizontal ties and bend
HEAT EXCHANGERS-2. Associate Professor. IIT Delhi E-mail: prabal@mech.iitd.ac.in. P.Talukdar/ Mech-IITD
 HEA EXHANGERS-2 Prabal alukdar Assoiate Professor Department of Mehanial Engineering II Delhi E-mail: prabal@meh.iitd.a.in Multipass and rossflow he subsripts 1 and 2 represent the inlet and outlet, respetively..
HEA EXHANGERS-2 Prabal alukdar Assoiate Professor Department of Mehanial Engineering II Delhi E-mail: prabal@meh.iitd.a.in Multipass and rossflow he subsripts 1 and 2 represent the inlet and outlet, respetively..
Annual Return/Report of Employee Benefit Plan
 Form 5500 Department of the Treasury Internal Revenue Servie Department of Labor Employee Benefits Seurity Administration Pension Benefit Guaranty Corporation Annual Return/Report of Employee Benefit Plan
Form 5500 Department of the Treasury Internal Revenue Servie Department of Labor Employee Benefits Seurity Administration Pension Benefit Guaranty Corporation Annual Return/Report of Employee Benefit Plan
Fixed-income Securities Lecture 2: Basic Terminology and Concepts. Present value (fixed interest rate) Present value (fixed interest rate): the arb
 Present value (fixed interest rate): the arb") Fixed-inome Seurities Leture 2: Basi Terminology and Conepts Philip H. Dybvig Washington University in Saint Louis Various interest rates Present value (PV) and arbitrage Forward and spot interest rates
Fixed-inome Seurities Leture 2: Basi Terminology and Conepts Philip H. Dybvig Washington University in Saint Louis Various interest rates Present value (PV) and arbitrage Forward and spot interest rates
Exempt Organization Business Income Tax Return
 Form For alendar year 2013 or other tax year beginning, and ending. 34 Unrelated business taxable. Subtrat line 33 from line 32. If line 33 is greater than line 32, enter the smaller of zero or line 32
Form For alendar year 2013 or other tax year beginning, and ending. 34 Unrelated business taxable. Subtrat line 33 from line 32. If line 33 is greater than line 32, enter the smaller of zero or line 32
5.2 The Master Theorem
 170 CHAPTER 5. RECURSION AND RECURRENCES 5.2 The Master Theorem Master Theorem In the last setion, we saw three different kinds of behavior for reurrenes of the form at (n/2) + n These behaviors depended
170 CHAPTER 5. RECURSION AND RECURRENCES 5.2 The Master Theorem Master Theorem In the last setion, we saw three different kinds of behavior for reurrenes of the form at (n/2) + n These behaviors depended
FOOTING DESIGN EXAMPLE
 County: Any Design: BRG Date: 10/007 Hwy: Any Ck Dsn: BRG Date: 10/007 FOOTING DESIGN EXAMPLE Design: Based on AASHTO LRFD 007 Specifications, TxDOT LRFD Bridge Design Manual, and TxDOT Project 0-4371
County: Any Design: BRG Date: 10/007 Hwy: Any Ck Dsn: BRG Date: 10/007 FOOTING DESIGN EXAMPLE Design: Based on AASHTO LRFD 007 Specifications, TxDOT LRFD Bridge Design Manual, and TxDOT Project 0-4371
SAFE. Post-Tensioned Concrete Design Manual DESIGN OF SLABS, BEAMS AND FOUNDATIONIS REINFORCED AND POST-TENSIONED CONCRETE
 SAFE DESIGN OF SLABS, BEAMS AND FOUNDATIONIS REINFORCED AND POST-TENSIONED CONCRETE Pot-Tenioned Conrete Deign Manual ISO SAF120108M5-Rev2 Berkeley, California, USA Verion 12 Deember 2010 Copyright Copyright
SAFE DESIGN OF SLABS, BEAMS AND FOUNDATIONIS REINFORCED AND POST-TENSIONED CONCRETE Pot-Tenioned Conrete Deign Manual ISO SAF120108M5-Rev2 Berkeley, California, USA Verion 12 Deember 2010 Copyright Copyright
Type of Force 1 Axial (tension / compression) Shear. 3 Bending 4 Torsion 5 Images 6 Symbol (+ -)
 Shear. 3 Bending 4 Torsion 5 Images 6 Symbol (+ -)") Cause: external force P Force vs. Stress Effect: internal stress f 05 Force vs. Stress Copyright G G Schierle, 2001-05 press Esc to end, for next, for previous slide 1 Type of Force 1 Axial (tension /
Cause: external force P Force vs. Stress Effect: internal stress f 05 Force vs. Stress Copyright G G Schierle, 2001-05 press Esc to end, for next, for previous slide 1 Type of Force 1 Axial (tension /