Open Joint Stock Company. «Central Scientific Research Institute «KURS»
|
|
|
- Beverly Mathews
- 7 years ago
- Views:
Transcription
1 Open Joint Stock Company «Central Scientific Research Institute «KURS»

2 The Central Scientific Research Institute Kurs deals with: System researches in a field of shipbuilding; Scientific-methodical accompaniment of works in a sphere of providing electronic compatibility of radio electronic means of naval ships and creation of equipment for collective protection; Modeling of radio electronic outfit of merchant ships; Training and educational systems; Means of three dimensional (3D) representation of information; Control systems for navigation of ships
 representation of information; Control systems")
3 INDIVIDUAL SET OF RESCUE EQUIPMENT FOR CREW AND PASSENGERS OF AIR AND NAVAL VESSELS

4 IDIVIDUAL SET OF RESCUE EQUIPMENT FOR CREW AND PASSENGERS OF AIR AND NAVAL VESSELS

5 Measuring and information complex for diving (designed jointly with OJSC «Tetis Pro»)

6 Measuring and information complex for diving

7 MF/HF/VHF COMPLEX OF SHIP RADIO CONTACT WITH DSC CODESIGNED BY OJSC CSRI «KURS» WITH FSUE «OMSK SCIENTIFIC RESEARCH INSTITUTE OF INSTRUMENT MAKING»

8 MF/HF/VHF COMPLEX OF SHIP RADIO CONTACT WITH DSC

9 MF/HF/VHF COMPLEX OF SHIP RADIO CONTACT WITH DSC

10 AUTOMATIZED OPERATION MODELLING COMPLEX OF RADIO- ELECTRONIC TOOLS OF MARINE EQUIPMENT

11

12 UNIVERSAL TURNING RATE MEASURING INSTRUMENT FOR RIVER AND MARINE VESSELS using fiber optic gyroscope

13

14 The seminatural modeling for providing of stand adjustment of a sample planned for delivery gives a possibility to evaluate and carry out: Logic of subsystems cooperation Interfaces of subsystems Working out of software Integration of systems

15 The possibilities of modeling include Evaluation of correspondence and correcting of technical decisions in a construction Providing of integration into a system of more higher level; Evaluation of correspondence to tacticaltechnical requirements on the base of quantity meanings of indexes and characteristics. Evaluation of exploitation possibilities and receiving of initial data for working out of recommendations on methods of application

16 Visualization of processes of distance control of UUV (unmanned underwater vehicles) Mapping: Geographic and geometric seabed features Depth Detected objects Location and remotely-operated vehicle maneuvers

17 The following products of CSRI «Kurs» are represented on stands of Brussels Innova 60 th Edition

18 ITEGRATED SYSTEM FOR PROVIDING SAFETY OF LITTORAL AND OFF-SHORE ACTIVITY FACILITIES OJSC «CSRI «KURS» proposes complex system for situation awareness in sea and on a bank for defense of a seashore and objects located on a shelf and on a bank (oil terminals, moorings, ports, electric stations, etc.) by control of surface, underwater and land situation, automated detection, identification and tracking of moving and immovable targets.
 by control of surface, underwater and land situation, automated detection, identification and tracking of")
19

20
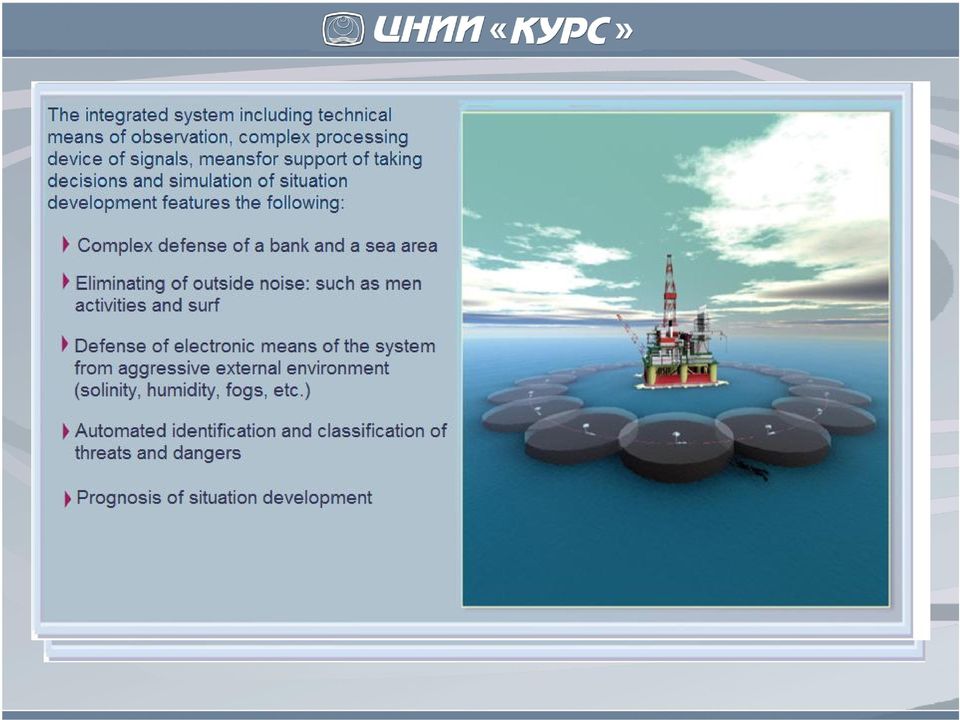
21 Main features Length of the controlled sea zone Length of the controlled bank zone Accuracy of an object s positioning: in sea zone on a bank zone Lifecycle Up to 1000 m Up to 500 m m m 10 years OJSC «CSRI «KURS» proposes services in designing, delivery and installing of the integrated system of situation awareness, adjusting it and training of customer s personnel.
22 SYSTEM FOR DEVELOPING AND MAPPING COMMON TACTICAL SITUATION AGAINST 3-D CARTOGRAPHIC BACKGROUND (3-D MODEL OF THE OBJECT), BASED ON DATA FROM ROBOTIC SYSTEM SENSORS
23 JSC Central R&D Institute Course represents a complex for determining and maintaining the overall situation in an emergency area on the basis of comparing images transmitted by robots with a 3-D digital surface (object) model, and the subsequent application of changes to the situation using a constructor with a library of ready-made standard elements of buildings, technical facilities, areas of destruction, rubble, etc.
24 The System Prototype consists of: A system for simulating data from the robotic system TV-camera An automated system for refining and applying the current situation in the emergency area to a 3-D surface (object) model with the help of a constructor with a library of readymade standard elements including buildings, technical facilities, areas of destruction, and rubble A way to control the movement of the robot guide s computer model
25
26 MEDICAL REFRIGERATION EQUIPMENT FOR STORING BIOLOGICAL MEDICINES, PLASMA AND BLOOD COMPONENTS
27 CABINET FOR BLOOD COMPONENTS НМ-500/50 Provides prolonged storage of blood components and biological samples in temperature range -30 C -50 C
28 Cabinet for blood components SHNM-200/90 Chest for medicobiological medicines LNM-200/90 Provides prolonged storage of blood components and biological samples in temperature range -70 С -90 С.
29 Equipment is based on single-stage refrigerating machine using environmental friendly refrigerant blends. Thus, it increases economy, safety and simplifies maintenance and after-sales service FEATURES: ELECTRIC TEMPRATURE CONTROL SET TEMPERATURE DEVIATION ALARM INTERFACE OUTLET FOR PC
30 INFORMATION MAPPING TECHNOLOGY REGARDING HAZARDOUS SITUATIONS AND SHIP MOVEMENT IN THE AREA OF NAVIGATION OBJECTS AND NAVIGATIONAL HAZARDS Certificate number 95007, dated July 30, 2007 Authors: G.M. Dovgobrod and L.M. Klyachko The technology for mapping the process of guiding a vessel helps the pilot put the ship on the desired course when passing through a narrow section of a waterway and in the case of other navigational hazards. This technology provides the pilot with estimates for the following parameters: the current and projected relative position of the vessel, any obstructions and the desired course, vector of velocity, the value of the drift angle, position in relation to the boundaries of the fairway, and the position of the ship s rudder.
31 INFORMATION MAPPING TECHNOLOGY REGARDING HAZARDOUS SITUATIONS AND SHIP MOVEMENT IN THE AREA OF NAVIGATION OBJECTS AND NAVIGATIONAL HAZARDS Initial state of guiding a vessel through a narrow section of a waterway Initial situation scheme Display view Assign a track t = 0s Boundary of the navigable channel Boundary of obstructions Current position of the barycentre Span of bridge dedicate to go of vessels Predictable position of the barycentre Desired course
32 INFORMATION MAPPING TECHNOLOGY REGARDING HAZARDOUS SITUATIONS AND SHIP MOVEMENT IN THE AREA OF NAVIGATION OBJECTS AND NAVIGATIONAL HAZARDS Images reflecting status of guiding vessels through a narrow section of a waterway t = 300s t = 460s Nose at a minimum distance from obstructions Current rudder position Recommended rudder position t = 490s Course is as desired Drift angle differs from zero
33 METHOD FOR DETERMINING SAFE TRAJECTORIES FOR HIGH-SPEED VESSELS IN THE CASE OF DANGEROUS SITUATIONS The image on the screen display is similar to that seen by the pilot from the ship s navigating bridge. This helps the pilot to achieve greater accuracy and speed. This technology can be used for the following types of vessel traffic control: Manual Semi-automatic (with an advisor) Automatic (for controlling the management process)
34 METHOD FOR DETERMINING SAFE TRAJECTORIES FOR HIGH-SPEED VESSELS IN THE CASE OF DANGEROUS SITUATIONS Patent: , dated August 14, 2009 Authors: G.M. Dovgobrod and L.M.Klyachko When a high-speed vessel is in cruise mode, an acceptable way to prevent adverse effects in the case that dangerous situations arise is to change the course of the ship with a possible overload. A method for determining admissible curved trajectories for high-speed vessels has been developed. This technology is based on the representation of a curved path as a sequence of elementary sections, providing a continuous change of curvature along the planned collision-free trajectory. Each elementary part constitutes a flat polynomial curve R 5 (u), defined by two-dimensional coefficients and basic Bernstein polynomials of degree 5. R (u) = a 5 where 0 + a 1 5 B (u) a B (u), 5 5 5! i 5 i B i (u) = u ( 1 u), i = 01,,..., 5, u [ 0, 1] i!( 5 i)!
35 [m] [1/m] METHOD FOR DETERMINING SAFE TRAJECTORIES FOR HIGH-SPEED VESSELS IN THE CASE OF DANGEROUS SITUATIONS Danger on a straight trajectory path Dangerous oncoming ship [m] Danger in the vicinity of the pivotal points V Curvature alignment charts of a collision-free trajectory С(s) < 1/Rallow, Rallow = 1000m Two examples of standard calculated trajectories V s Conjugation points of elementary sectors [m] [1/m] [m] [m] [m] s Dangerous oncoming ship
36 METHOD FOR DETERMINING SAFE TRAJECTORIES FOR HIGH-SPEED VESSELS IN THE CASE OF DANGEROUS SITUATIONS Technology determines safe trajectories for following standard situations: 1. Changing the course for the parallel one. 2. Obstacle avoidance with return to the initial course. 3. Obstacle avoidance with changing initial course 4. Setting the course from random location. 5. Changing one linear path for another while passing waypoint. The parameters of the elementary parts of the planned trajectory are calculated according to the given boundary conditions. The calculation is performed for a minimum period of time, because the calculations do not involve the use of any iterative process. PRESENTED TECHNOLOGY IMPROVES SAFETY OF HIGH- SPEED VESSELS OPERATION.
37 CSRI «Kurs» is permanently extending its field and inviting ship designers and REF developers to cooperate THANKS FOR YOUR ATTENTION!
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Christian Zinner Safe and Autonomous Systems
CONCEPT FOR ACTIVITY 1: DYNAMIC & PROACTIVE ROUTES OR GREEN-ROUTES
 TEN-T PROJECT NO: 2010-EU-21109-S CONCEPT FOR ACTIVITY 1: DYNAMIC & PROACTIVE ROUTES OR GREEN-ROUTES January 2012 TABLE OF CONTENTS 1 INTRODUCTION... 3 1.1 Scope and purpose... 3 1.2 Objectives and expected
TEN-T PROJECT NO: 2010-EU-21109-S CONCEPT FOR ACTIVITY 1: DYNAMIC & PROACTIVE ROUTES OR GREEN-ROUTES January 2012 TABLE OF CONTENTS 1 INTRODUCTION... 3 1.1 Scope and purpose... 3 1.2 Objectives and expected
CHAPTER 1 INTRODUCTION
 CHAPTER 1 INTRODUCTION 1.1 Background of the Research Agile and precise maneuverability of helicopters makes them useful for many critical tasks ranging from rescue and law enforcement task to inspection
CHAPTER 1 INTRODUCTION 1.1 Background of the Research Agile and precise maneuverability of helicopters makes them useful for many critical tasks ranging from rescue and law enforcement task to inspection
1.1 The primary function of the ECDIS is to contribute to safe navigation.
 IMO RESOLUTION A.817 (19) PERFORMANCE STANDARDS FOR ELECTRONIC CHART DISPLAY AND INFORMATION SYSTEMS (ECDIS) Note: The IMO Performance Standards for ECDIS are reproduced in this publication for convenience,
IMO RESOLUTION A.817 (19) PERFORMANCE STANDARDS FOR ELECTRONIC CHART DISPLAY AND INFORMATION SYSTEMS (ECDIS) Note: The IMO Performance Standards for ECDIS are reproduced in this publication for convenience,
Roadmap for Remote Controlled Ships
 Roadmap for Remote Controlled Ships Esa Jokioinen, Head of Blue Ocean Team, E&T, Marine MUNIN Workshop Professional Insight on Unmanned Ships Norshipping, 3.6.2015 2015 Rolls-Royce plc The information
Roadmap for Remote Controlled Ships Esa Jokioinen, Head of Blue Ocean Team, E&T, Marine MUNIN Workshop Professional Insight on Unmanned Ships Norshipping, 3.6.2015 2015 Rolls-Royce plc The information
AIS (Automatic Identification System)
") AIS (Automatic Identification System) AIS are the one of the most important aids to navigation that you can have add to your navigations system. It is an excellent tool for collision avoidance. In the
AIS (Automatic Identification System) AIS are the one of the most important aids to navigation that you can have add to your navigations system. It is an excellent tool for collision avoidance. In the
Real-time Risk Assessment for Aids to Navigation Using Fuzzy-FSA on Three-Dimensional Simulation System
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 8 Number 2 June 2014 DOI: 10.12716/1001.08.02.04 Real-time Risk Assessment for Aids to Navigation
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 8 Number 2 June 2014 DOI: 10.12716/1001.08.02.04 Real-time Risk Assessment for Aids to Navigation
GUIDELINES AND CRITERIA FOR VESSEL TRAFFIC SERVICES ON INLAND WATERWAYS (VTS Guidelines 2006)
") GUIDELINES AND CRITERIA FOR VESSEL TRAFFIC SERVICES ON INLAND WATERWAYS (VTS Guidelines 2006) 1. INTRODUCTION 1.1 These Guidelines are compatible with SOLAS regulation V/8-2 and IMO Assembly Resolution
GUIDELINES AND CRITERIA FOR VESSEL TRAFFIC SERVICES ON INLAND WATERWAYS (VTS Guidelines 2006) 1. INTRODUCTION 1.1 These Guidelines are compatible with SOLAS regulation V/8-2 and IMO Assembly Resolution
WATERWAYS in Finland
 WATERWAYS in Finland The efficient and economical running of Finland s vital international transport demands a comprehensive and safe network of fairways. The mission of the Finnish Maritime Administration
WATERWAYS in Finland The efficient and economical running of Finland s vital international transport demands a comprehensive and safe network of fairways. The mission of the Finnish Maritime Administration
IMO. RESOLUTION A.817(19) adopted on 23 November 1995 PERFORMANCE STANDARDS FOR ELECTRONIC CHART DISPLAY AND INFORMATION SYSTEMS (ECDIS)
 adopted on 23 November 1995 PERFORMANCE STANDARDS FOR ELECTRONIC CHART DISPLAY AND INFORMATION SYSTEMS (ECDIS)") INTERNATIONAL MARITIME ORGANIZATION E IMO A 19/Res.817 15 December 1996 Original: ENGLISH ASSEMBLY 19th session Agenda item 10 RESOLUTION A.817(19) adopted on 23 November 1995 PERFORMANCE STANDARDS FOR
INTERNATIONAL MARITIME ORGANIZATION E IMO A 19/Res.817 15 December 1996 Original: ENGLISH ASSEMBLY 19th session Agenda item 10 RESOLUTION A.817(19) adopted on 23 November 1995 PERFORMANCE STANDARDS FOR
Evaluating ship collision risks
 Evaluating ship collision risks Silveira, P., Teixeira, A.P, & Guedes Soares, C. IRIS Project risk management: Improving risk matrices using multiple criteria decision analysis Centre for Marine Technology
Evaluating ship collision risks Silveira, P., Teixeira, A.P, & Guedes Soares, C. IRIS Project risk management: Improving risk matrices using multiple criteria decision analysis Centre for Marine Technology
Overset Grids Technology in STAR-CCM+: Methodology and Applications
 Overset Grids Technology in STAR-CCM+: Methodology and Applications Eberhard Schreck, Milovan Perić and Deryl Snyder eberhard.schreck@cd-adapco.com milovan.peric@cd-adapco.com deryl.snyder@cd-adapco.com
Overset Grids Technology in STAR-CCM+: Methodology and Applications Eberhard Schreck, Milovan Perić and Deryl Snyder eberhard.schreck@cd-adapco.com milovan.peric@cd-adapco.com deryl.snyder@cd-adapco.com
Introduction to AIS White Paper
 Introduction to AIS White Paper 1. Background AIS (Automatic Identification System) is the mariner s most significant development in navigation safety since the introduction of radar. The system was originally
Introduction to AIS White Paper 1. Background AIS (Automatic Identification System) is the mariner s most significant development in navigation safety since the introduction of radar. The system was originally
Fraunhofer Institute for Computer Graphics research IGD. maritime graphics
 Fraunhofer Institute for Computer Graphics research IGD maritime graphics Contents Maritime Graphics 2 Virtual Technologies 3 Training systems in the maritime sector 3 Virtual reality technologies in shipbuilding
Fraunhofer Institute for Computer Graphics research IGD maritime graphics Contents Maritime Graphics 2 Virtual Technologies 3 Training systems in the maritime sector 3 Virtual reality technologies in shipbuilding
Regulation of 15 September 1992 No. 704 concerning operating arrangements on Norwegian ships
 Regulation of 5 September 992 No. 704 concerning operating arrangements on Norwegian ships Laid down by the Norwegian Maritime Directorate on 5 September 992 pursuant to the Act of 9 June 903 no. 7 relating
Regulation of 5 September 992 No. 704 concerning operating arrangements on Norwegian ships Laid down by the Norwegian Maritime Directorate on 5 September 992 pursuant to the Act of 9 June 903 no. 7 relating
An Instructional Aid System for Driving Schools Based on Visual Simulation
 An Instructional Aid System for Driving Schools Based on Visual Simulation Salvador Bayarri, Rafael Garcia, Pedro Valero, Ignacio Pareja, Institute of Traffic and Road Safety (INTRAS), Marcos Fernandez
An Instructional Aid System for Driving Schools Based on Visual Simulation Salvador Bayarri, Rafael Garcia, Pedro Valero, Ignacio Pareja, Institute of Traffic and Road Safety (INTRAS), Marcos Fernandez
SYSTEM GLOBAL NAVIGATION SATELLITE SYSTEM LANDING TECHNOLOGY/PRODUCT DEVELOPMENT
 GLOBAL NAVIGATION SATELLITE SYSTEM LANDING SYSTEM The aviation industry is developing a new positioning and landing system based on the Global Navigation Satellite System (GNSS). The GNSS landing system
GLOBAL NAVIGATION SATELLITE SYSTEM LANDING SYSTEM The aviation industry is developing a new positioning and landing system based on the Global Navigation Satellite System (GNSS). The GNSS landing system
Passenger Terminal Amsterdam
 Fact sheet large cruise ships to Passenger Terminal Amsterdam Port of Amsterdam Amsterdam-IJmond Pilot Organization 2009 Version: November 6 th 2009 This fact sheet provides information on the passage
Fact sheet large cruise ships to Passenger Terminal Amsterdam Port of Amsterdam Amsterdam-IJmond Pilot Organization 2009 Version: November 6 th 2009 This fact sheet provides information on the passage
CHAPTER 7 DEAD RECKONING
 CHAPTER 7 DEAD RECKONING DEFINITION AND PURPOSE 700. Definition and Use Dead reckoning is the process of determining one s present position by projecting course(s) and speed(s) from a known past position,
CHAPTER 7 DEAD RECKONING DEFINITION AND PURPOSE 700. Definition and Use Dead reckoning is the process of determining one s present position by projecting course(s) and speed(s) from a known past position,
Ship Offshore platform Collision Risk Assessment (SOCRA)
") Ship Offshore platform Collision Risk Assessment (SOCRA) by C. van der Tak, MSCN, Maritime Simulation Centre the Netherlands, BV C.C. Glansdorp, MARAN, Marine Analytics, BV ABSTRACT Knowledge of maritime
Ship Offshore platform Collision Risk Assessment (SOCRA) by C. van der Tak, MSCN, Maritime Simulation Centre the Netherlands, BV C.C. Glansdorp, MARAN, Marine Analytics, BV ABSTRACT Knowledge of maritime
Propsim enabled Aerospace, Satellite and Airborne Radio System Testing
 www.anite.com Propsim enabled Aerospace, Satellite and Airborne Radio System Testing Anite is now part of Keysight Technologies Realistic and repeatable real-time radio channel emulation solutions for
www.anite.com Propsim enabled Aerospace, Satellite and Airborne Radio System Testing Anite is now part of Keysight Technologies Realistic and repeatable real-time radio channel emulation solutions for
LP News. New ECDIS mandatory requirements Part 2: A key to safe operation UK P&I CLUB
 UK P&I CLUB LP News MARCH 2011 New ECDIS mandatory requirements Part 2: A key to safe operation The mandatory requirement and introduction of electronic chart display and information systems is seen as
UK P&I CLUB LP News MARCH 2011 New ECDIS mandatory requirements Part 2: A key to safe operation The mandatory requirement and introduction of electronic chart display and information systems is seen as
Automated Container Handling in Port Terminals
 Automated Container Handling in Port Terminals Overview. Shipping containers revolutionized the movement of goods, driving change and efficiency throughout the global supply chain. The next revolution
Automated Container Handling in Port Terminals Overview. Shipping containers revolutionized the movement of goods, driving change and efficiency throughout the global supply chain. The next revolution
Current Standard: Mathematical Concepts and Applications Shape, Space, and Measurement- Primary
 Shape, Space, and Measurement- Primary A student shall apply concepts of shape, space, and measurement to solve problems involving two- and three-dimensional shapes by demonstrating an understanding of:
Shape, Space, and Measurement- Primary A student shall apply concepts of shape, space, and measurement to solve problems involving two- and three-dimensional shapes by demonstrating an understanding of:
Research Article ISSN 2277 9140 Copyright by the authors - Licensee IJACIT- Under Creative Commons license 3.0
 INTERNATIONAL JOURNAL OF ADVANCES IN COMPUTING AND INFORMATION TECHNOLOGY An international, online, open access, peer reviewed journal Volume 2 Issue 2 April 2013 Research Article ISSN 2277 9140 Copyright
INTERNATIONAL JOURNAL OF ADVANCES IN COMPUTING AND INFORMATION TECHNOLOGY An international, online, open access, peer reviewed journal Volume 2 Issue 2 April 2013 Research Article ISSN 2277 9140 Copyright
e-navigation and Geospatial Intelligence for Maritime Operations; Developing a Strategic Vision Digital Ship Athens 2014
 e-navigation and Geospatial Intelligence for Maritime Operations; Developing a Strategic Vision Digital Ship Athens 2014 Michael Rambaut for John Erik Hagen, Regional Director NCA Coordinator of IMO Correspondence
e-navigation and Geospatial Intelligence for Maritime Operations; Developing a Strategic Vision Digital Ship Athens 2014 Michael Rambaut for John Erik Hagen, Regional Director NCA Coordinator of IMO Correspondence
HDS Gen2 RTM 4.0 software update
 HDS Gen2 RTM 4.0 software update The HDS RTM 4.0 software update enables autopilot control of outboard motors and includes features for Jeppesen 4D charts. Outboard motor autopilot To use outboard autopilot
HDS Gen2 RTM 4.0 software update The HDS RTM 4.0 software update enables autopilot control of outboard motors and includes features for Jeppesen 4D charts. Outboard motor autopilot To use outboard autopilot
LB Sky Global. 92 Lobachevskogo St, Bld 92, Office 5, Moscow, Russia 119454 Tel/Fax 7(495)229-39-78, E-mail: office@grouplb.com, Site: www.grouplb.
229-39-78, E-mail: office@grouplb.com, Site: www.grouplb.") Perimeter security system T-REX Moscow, 2011 Table of content 1. Introduction... 3 2. Main features of the T-REX system... 3 3. Structure of the system... 5 4. SL-6000 system sensors... 6 5. Signal processing
Perimeter security system T-REX Moscow, 2011 Table of content 1. Introduction... 3 2. Main features of the T-REX system... 3 3. Structure of the system... 5 4. SL-6000 system sensors... 6 5. Signal processing
THESE INSTRUCTIONS ARE INTENDED FOR MARINERS CARRYING OUT THE IHO ENC/ECDIS DATA PRESENTATION AND PERFORMANCE CHECKS
 THESE INSTRUCTIONS ARE INTENDED FOR MARINERS CARRYING OUT THE IHO ENC/ECDIS DATA PRESENTATION AND PERFORMANCE CHECKS The checks and the accompanying dataset are not intended for, and are not suitable to
THESE INSTRUCTIONS ARE INTENDED FOR MARINERS CARRYING OUT THE IHO ENC/ECDIS DATA PRESENTATION AND PERFORMANCE CHECKS The checks and the accompanying dataset are not intended for, and are not suitable to
Marine industry careers
 Marine industry careers Québec s marine transport industry: an economic driving force The St. Lawrence River permits large volumes of raw materials and manufactured products (imports and exports) to be
Marine industry careers Québec s marine transport industry: an economic driving force The St. Lawrence River permits large volumes of raw materials and manufactured products (imports and exports) to be
ECDIS Display, Safety Settings and Alarm Management
 ECDIS Display, Safety Settings and Alarm Management Captain Zakirul Bhuiyan, MSc, PGCE, AFRIN, AFNI Senior Lecturer, Ship Simulation Warsash Maritime Academy Southampton Solent University Newtown Road,
ECDIS Display, Safety Settings and Alarm Management Captain Zakirul Bhuiyan, MSc, PGCE, AFRIN, AFNI Senior Lecturer, Ship Simulation Warsash Maritime Academy Southampton Solent University Newtown Road,
Esa Jokioinen Rolls Royce Marine 10.9.2014 MUNIN Workshop at SMM. Trusted to deliver excellence
 Esa Jokioinen Rolls Royce Marine 10.9.2014 MUNIN Workshop at SMM 2014 Rolls-Royce plc The information in this document is the property of Rolls-Royce plc and may not be copied or communicated to a third
Esa Jokioinen Rolls Royce Marine 10.9.2014 MUNIN Workshop at SMM 2014 Rolls-Royce plc The information in this document is the property of Rolls-Royce plc and may not be copied or communicated to a third
Instrumentation for Monitoring around Marine Renewable Energy Devices
 Instrumentation for Monitoring around Marine Renewable Energy Devices 1 Introduction As marine renewable energy has developed, a set of consistent challenges has emerged following attempts to understand
Instrumentation for Monitoring around Marine Renewable Energy Devices 1 Introduction As marine renewable energy has developed, a set of consistent challenges has emerged following attempts to understand
Shallow Water Swath Bathymetry from Small Platforms. Advances in Seafloor Mapping Sonar, 30 Dec 2009 Systems Engineering & Assessment Ltd.
 Shallow Water Swath Bathymetry from Small Platforms Advances in Seafloor Mapping Sonar, 30 Dec 2009 Systems Engineering & Assessment Ltd. Presentation Requirements, applications and challenges SWATHplus
Shallow Water Swath Bathymetry from Small Platforms Advances in Seafloor Mapping Sonar, 30 Dec 2009 Systems Engineering & Assessment Ltd. Presentation Requirements, applications and challenges SWATHplus
Geometric Constraints
 Simulation in Computer Graphics Geometric Constraints Matthias Teschner Computer Science Department University of Freiburg Outline introduction penalty method Lagrange multipliers local constraints University
Simulation in Computer Graphics Geometric Constraints Matthias Teschner Computer Science Department University of Freiburg Outline introduction penalty method Lagrange multipliers local constraints University
Guidance on vessel traffic services (VTS) in Danish waters
 in Danish waters") Translation. Only the Danish document has legal validity. Guidance no. 9680 of 16 December 2010 issued by the Danish Maritime Authority Guidance on vessel traffic services (VTS) in Danish waters Purpose
Translation. Only the Danish document has legal validity. Guidance no. 9680 of 16 December 2010 issued by the Danish Maritime Authority Guidance on vessel traffic services (VTS) in Danish waters Purpose
IAI/Malat Solutions for the Maritime Arena
 IAI/Malat Solutions for the Maritime Arena Any country with a proximity to the sea has an important operational need to positively and unambiguously identify, in time, threats that originate in the maritime
IAI/Malat Solutions for the Maritime Arena Any country with a proximity to the sea has an important operational need to positively and unambiguously identify, in time, threats that originate in the maritime
Vectors. Objectives. Assessment. Assessment. Equations. Physics terms 5/15/14. State the definition and give examples of vector and scalar variables.
 Vectors Objectives State the definition and give examples of vector and scalar variables. Analyze and describe position and movement in two dimensions using graphs and Cartesian coordinates. Organize and
Vectors Objectives State the definition and give examples of vector and scalar variables. Analyze and describe position and movement in two dimensions using graphs and Cartesian coordinates. Organize and
Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm
 1 Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm Hani Mehrpouyan, Student Member, IEEE, Department of Electrical and Computer Engineering Queen s University, Kingston, Ontario,
1 Enhancing the SNR of the Fiber Optic Rotation Sensor using the LMS Algorithm Hani Mehrpouyan, Student Member, IEEE, Department of Electrical and Computer Engineering Queen s University, Kingston, Ontario,
Evolving Bar Codes. Y398 Internship. William Holmes
 Evolving Bar Codes Y398 Internship By William Holmes Table of contents Introduction: What is RFID? Types of Tags: Advantages of Tags: RFID applications Conclusion: Introduction: Bar codes have evolved
Evolving Bar Codes Y398 Internship By William Holmes Table of contents Introduction: What is RFID? Types of Tags: Advantages of Tags: RFID applications Conclusion: Introduction: Bar codes have evolved
Ship Monitoring System using Communication Satellite for Maritime Safety
 Ship Monitoring System using Communication Satellite for Maritime Safety K. INOUE, H. USUI, K. HIRONO, W. SERA Faculty of Maritime Sciences, Kobe University, Japan. Abstract Any subsequent action to ensure
Ship Monitoring System using Communication Satellite for Maritime Safety K. INOUE, H. USUI, K. HIRONO, W. SERA Faculty of Maritime Sciences, Kobe University, Japan. Abstract Any subsequent action to ensure
COMPOSITE BUILDING OF PROFESSIONAL VESSELS DAMEN SHIPYARDS ANTALYA
 COMPOSITE BUILDING OF PROFESSIONAL VESSELS DAMEN SHIPYARDS ANTALYA The Damen Shipyards Group is continuously investing in research and development of its products. As a result, we are able to offer professional
COMPOSITE BUILDING OF PROFESSIONAL VESSELS DAMEN SHIPYARDS ANTALYA The Damen Shipyards Group is continuously investing in research and development of its products. As a result, we are able to offer professional
Lean Six Sigma Analyze Phase Introduction. TECH 50800 QUALITY and PRODUCTIVITY in INDUSTRY and TECHNOLOGY
 TECH 50800 QUALITY and PRODUCTIVITY in INDUSTRY and TECHNOLOGY Before we begin: Turn on the sound on your computer. There is audio to accompany this presentation. Audio will accompany most of the online
TECH 50800 QUALITY and PRODUCTIVITY in INDUSTRY and TECHNOLOGY Before we begin: Turn on the sound on your computer. There is audio to accompany this presentation. Audio will accompany most of the online
The Impact of GPS Jamming on the Safety of Navigation
 The Impact of GPS Jamming on the Safety of Navigation Dr S Basker, Dr A Grant, Dr P Williams, Dr N Ward Presented to the Civil GPS Service Interface Committee, Savannah GA, 15 September 2008 Presentation
The Impact of GPS Jamming on the Safety of Navigation Dr S Basker, Dr A Grant, Dr P Williams, Dr N Ward Presented to the Civil GPS Service Interface Committee, Savannah GA, 15 September 2008 Presentation
TECHNICAL INFORMATION
 Page: 1/6 This checklist recognizes the major accident hazards found by experience of previous HAZID studies. It is not intended to be totally exhaustive and feedback from users should be incorporated
Page: 1/6 This checklist recognizes the major accident hazards found by experience of previous HAZID studies. It is not intended to be totally exhaustive and feedback from users should be incorporated
What did the Wright brothers invent?
 What did the Wright brothers invent? The airplane, right? Well, not exactly. Page 1 of 15 The Wrights never claimed to have invented the airplane, or even the first airplane to fly. In their own words,
What did the Wright brothers invent? The airplane, right? Well, not exactly. Page 1 of 15 The Wrights never claimed to have invented the airplane, or even the first airplane to fly. In their own words,
Statistical Summary Marine Occurrences 2013
 Statistical Summary Marine Occurrences 2013 Foreword This document provides Canadians with an annual summary of selected maritime safety data. It covers commercial vessels, which include all vessels registered
Statistical Summary Marine Occurrences 2013 Foreword This document provides Canadians with an annual summary of selected maritime safety data. It covers commercial vessels, which include all vessels registered
Technology in the littorals Below the surface and in-shore. Linus Fast R&D Advisor @ SwAF HQ, Naval Dpt linus.fast@foi.se
 Technology in the littorals Below the surface and in-shore Linus Fast R&D Advisor @ SwAF HQ, Naval Dpt linus.fast@foi.se The Baltic Sea: Physical environment Shallow - Mean depth about 60 m Large river
Technology in the littorals Below the surface and in-shore Linus Fast R&D Advisor @ SwAF HQ, Naval Dpt linus.fast@foi.se The Baltic Sea: Physical environment Shallow - Mean depth about 60 m Large river
APPLICATION FOR THE CONSENT TO CONDUCT MARINE SCIENTIFIC RESEARCH IN AREAS UNDER NATIONAL JURISDICTION OF THE UNITED KINGDOM
 APPLICATION FOR THE CONSENT TO CONDUCT MARINE SCIENTIFIC RESEARCH IN AREAS UNDER NATIONAL JURISDICTION OF THE UNITED KINGDOM 1. General information Date: 15/10/2012 1.1 Cruise name and/or number: 1.2 Sponsoring
APPLICATION FOR THE CONSENT TO CONDUCT MARINE SCIENTIFIC RESEARCH IN AREAS UNDER NATIONAL JURISDICTION OF THE UNITED KINGDOM 1. General information Date: 15/10/2012 1.1 Cruise name and/or number: 1.2 Sponsoring
3.13 Public Health and Safety
 3.13 Public Health and Safety TABLE OF CONTENTS 3.13 PUBLIC HEALTH AND SAFETY... 3.13-1 3.13.1 INTRODUCTION AND METHODS... 3.13-1 3.13.1.1 Introduction... 3.13-1 3.13.1.2 Methods... 3.13-1 3.13.2 AFFECTED
3.13 Public Health and Safety TABLE OF CONTENTS 3.13 PUBLIC HEALTH AND SAFETY... 3.13-1 3.13.1 INTRODUCTION AND METHODS... 3.13-1 3.13.1.1 Introduction... 3.13-1 3.13.1.2 Methods... 3.13-1 3.13.2 AFFECTED
CHAPTER 2 AIR TRAFFIC CONTROLLER (AC) NAVPERS 18068-2F CH-64
 NAVPERS 18068-2F CH-64") CHAPTER 2 AIR TRAFFIC CONTROLLER (AC) NAVPERS 18068-2F CH-64 Updated: October 2015 TABLE OF CONTENTS AIR TRAFFIC CONTROLLER (AC) SCOPE OF RATING GENERAL INFORMATION AIR TRAFFIC CONTROLLER CONTROL TOWER
CHAPTER 2 AIR TRAFFIC CONTROLLER (AC) NAVPERS 18068-2F CH-64 Updated: October 2015 TABLE OF CONTENTS AIR TRAFFIC CONTROLLER (AC) SCOPE OF RATING GENERAL INFORMATION AIR TRAFFIC CONTROLLER CONTROL TOWER
GPSMAP. 4000/5000 series owner s manual
 GPSMAP 4000/5000 series owner s manual 2009 2011 Garmin Ltd. or its subsidiaries All rights reserved. Except as expressly provided herein, no part of this manual may be reproduced, copied, transmitted,
GPSMAP 4000/5000 series owner s manual 2009 2011 Garmin Ltd. or its subsidiaries All rights reserved. Except as expressly provided herein, no part of this manual may be reproduced, copied, transmitted,
The Unmanned Little Bird (ULB) Decking Risk Reduction Test Approach
 Decking Risk Reduction Test Approach") The Unmanned Little Bird (ULB) Decking Risk Reduction Test Approach Authors: Dino Cerchie Mark Hardesty Roger Hehr Jason Graham Unmanned Little Bird (ULB) Rapid prototyping test platform for developing
The Unmanned Little Bird (ULB) Decking Risk Reduction Test Approach Authors: Dino Cerchie Mark Hardesty Roger Hehr Jason Graham Unmanned Little Bird (ULB) Rapid prototyping test platform for developing
Bi-Directional DGPS for Range Safety Applications
 Bi-Directional DGPS for Range Safety Applications Ranjeet Shetty 234-A, Avionics Engineering Center, Russ College of Engineering and Technology, Ohio University Advisor: Dr. Chris Bartone Outline Background
Bi-Directional DGPS for Range Safety Applications Ranjeet Shetty 234-A, Avionics Engineering Center, Russ College of Engineering and Technology, Ohio University Advisor: Dr. Chris Bartone Outline Background
Reflection and Refraction
 Equipment Reflection and Refraction Acrylic block set, plane-concave-convex universal mirror, cork board, cork board stand, pins, flashlight, protractor, ruler, mirror worksheet, rectangular block worksheet,
Equipment Reflection and Refraction Acrylic block set, plane-concave-convex universal mirror, cork board, cork board stand, pins, flashlight, protractor, ruler, mirror worksheet, rectangular block worksheet,
Part 0 - Classification and Surveys Classification and Surveys I-0 2016-01
 Code Edition I - Ship Technology Part 0 - Classification and Surveys Classification and Surveys I-0 2016-01 Part 1 - Seagoing Ships Chapter 1 - Hull Structures I-1-1 2016-01 Chapter 1 - Hull Structures
Code Edition I - Ship Technology Part 0 - Classification and Surveys Classification and Surveys I-0 2016-01 Part 1 - Seagoing Ships Chapter 1 - Hull Structures I-1-1 2016-01 Chapter 1 - Hull Structures
CFD Modelling and Real-time testing of the Wave Surface Glider (WSG) Robot
 Robot") 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 CFD Modelling and Real-time testing of the Wave Surface Glider (WSG) Robot
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 CFD Modelling and Real-time testing of the Wave Surface Glider (WSG) Robot
Planning requirements for heliports and helicopter landing sites
 Practice Note 75 December 2012 Planning requirements for heliports and helicopter landing sites The purpose of this practice note is to: 1. Explain how helicopter activity is regulated by the planning
Practice Note 75 December 2012 Planning requirements for heliports and helicopter landing sites The purpose of this practice note is to: 1. Explain how helicopter activity is regulated by the planning
Law of Ukraine on the exclusive (marine) economic zone of 16 May 1995
 economic zone of 16 May 1995") Page 1 Law of Ukraine on the exclusive (marine) economic zone of 16 May 1995 Taking into consideration the relevant provisions of the 1982 United Nations Convention on the Law of the Sea, Ukraine hereby
Page 1 Law of Ukraine on the exclusive (marine) economic zone of 16 May 1995 Taking into consideration the relevant provisions of the 1982 United Nations Convention on the Law of the Sea, Ukraine hereby
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving
 3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
3D Vision An enabling Technology for Advanced Driver Assistance and Autonomous Offroad Driving AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Safe and Autonomous Systems
Project abstracts (not edited) of winners of Phase 1 of the SBRI call on Adaptive Autonomous Ocean Sampling Networks
 of winners of Phase 1 of the SBRI call on Adaptive Autonomous Ocean Sampling Networks") Project abstracts (not edited) of winners of Phase 1 of the SBRI call on Adaptive Autonomous Ocean Sampling Networks NOC-DSTL-Innovate UK SBRI team Version 1: 01.04.2015 SBRI NOC-AAOSN-205 - Extending
Project abstracts (not edited) of winners of Phase 1 of the SBRI call on Adaptive Autonomous Ocean Sampling Networks NOC-DSTL-Innovate UK SBRI team Version 1: 01.04.2015 SBRI NOC-AAOSN-205 - Extending
Vessels reporting duties on the NSR
 The Arctic 2030 Project: Feasibility and Reliability of Shipping on the Northern Sea Route and Modeling of an Arctic Marine Transportation & Logistics System 1-st Industry Seminar: NSR s Legislation, Tariff
The Arctic 2030 Project: Feasibility and Reliability of Shipping on the Northern Sea Route and Modeling of an Arctic Marine Transportation & Logistics System 1-st Industry Seminar: NSR s Legislation, Tariff
MaxSea TimeZero Alarms
 MaxSea version : TimeZero v2.1 (ECS/PLOT) Technical Note : MaxSea TimeZero Alarms Windows: Windows 7 / Windows 8 Update: September 2014 MaxSea TimeZero Alarms The Alarm options allow you to configure all
MaxSea version : TimeZero v2.1 (ECS/PLOT) Technical Note : MaxSea TimeZero Alarms Windows: Windows 7 / Windows 8 Update: September 2014 MaxSea TimeZero Alarms The Alarm options allow you to configure all
Emergency Response Plan. at sea also valid in case of Flooding, where applicable
 Plan 1. Grounding, Stranding at sea also valid in case of Flooding, where applicable 2. Application Shorebased Organisation All Ships prepared: approved: released: Revision 0 HLS Management 2006-11-24
Plan 1. Grounding, Stranding at sea also valid in case of Flooding, where applicable 2. Application Shorebased Organisation All Ships prepared: approved: released: Revision 0 HLS Management 2006-11-24
Examination of ships passing distances distribution in the coastal waters in order to build a ship probabilistic domain
 Scientific Journals Maritime University of Szczecin Zeszyty Naukowe Akademia Morska w Szczecinie 212, 32(14) z. 2 pp. 34 4 212, 32(14) z. 2 s. 34 4 Examination of ships passing distances distribution in
Scientific Journals Maritime University of Szczecin Zeszyty Naukowe Akademia Morska w Szczecinie 212, 32(14) z. 2 pp. 34 4 212, 32(14) z. 2 s. 34 4 Examination of ships passing distances distribution in
REPUBLIC OF. Marine Notice THE MARSHALL ISLANDS No. 2-011-18 OFFICE OF THE MARITIME ADMINISTRATOR Rev. 8/06
 REPUBLIC OF Marine Notice THE MARSHALL ISLANDS No. 2-011-18 OFFICE OF THE MARITIME ADMINISTRATOR Rev. 8/06 TO: SUBJECT: ALL SHIPOWNERS, OPERATORS, MASTERS AND OFFICERS OF MERCHANT SHIPS, AND RECOGNIZED
REPUBLIC OF Marine Notice THE MARSHALL ISLANDS No. 2-011-18 OFFICE OF THE MARITIME ADMINISTRATOR Rev. 8/06 TO: SUBJECT: ALL SHIPOWNERS, OPERATORS, MASTERS AND OFFICERS OF MERCHANT SHIPS, AND RECOGNIZED
NEW ROLES FOR UUVS IN INTELLIGENCE, SURVEILLANCE, AND RECONNAISSANCE
 NEW ROLES FOR UUVS IN INTELLIGENCE, SURVEILLANCE, AND RECONNAISSANCE Barbara Fletcher Space and Naval Warfare Systems Center D744 San Diego, CA USA bfletch@spawar.navy.mil ABSTRACT Intelligence, Surveillance,
NEW ROLES FOR UUVS IN INTELLIGENCE, SURVEILLANCE, AND RECONNAISSANCE Barbara Fletcher Space and Naval Warfare Systems Center D744 San Diego, CA USA bfletch@spawar.navy.mil ABSTRACT Intelligence, Surveillance,
Robotics. Lecture 3: Sensors. See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information.
 Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
Robotics Lecture 3: Sensors See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Locomotion Practical
1. NON CONTACT DIGITAL TACHOMETER USING AVR MICROCONTROLLER 2. CELSIUS SCALE THERMOMETER USING Atmega 8 -- 3. BLACK BOX SECURITY SYSTEM FOR CAR USING
 1. NON CONTACT DIGITAL TACHOMETER USING AVR MICROCONTROLLER 2. CELSIUS SCALE THERMOMETER USING Atmega 8 -- 3. BLACK BOX SECURITY SYSTEM FOR CAR USING SENSORS 4. ULTRASONIC DISTANCE METER 5. 5 CHANNEL IR
1. NON CONTACT DIGITAL TACHOMETER USING AVR MICROCONTROLLER 2. CELSIUS SCALE THERMOMETER USING Atmega 8 -- 3. BLACK BOX SECURITY SYSTEM FOR CAR USING SENSORS 4. ULTRASONIC DISTANCE METER 5. 5 CHANNEL IR
DEFINING AND MEASURING PHYSICAL PARAMETERS OF PC POLISHED FIBER OPTIC CONNECTORS
 DEFINING AND MEASURING PHYSICAL PARAMETERS OF PC POLISHED FIBER OPTIC CONNECTORS Eric A. Norland Norland Products, Inc. PO Box 637, Building100 2540 Route 130 Cranbury, NJ 08512 www.norlandprod.com ABSTRACT
DEFINING AND MEASURING PHYSICAL PARAMETERS OF PC POLISHED FIBER OPTIC CONNECTORS Eric A. Norland Norland Products, Inc. PO Box 637, Building100 2540 Route 130 Cranbury, NJ 08512 www.norlandprod.com ABSTRACT
Path Tracking for a Miniature Robot
 Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
SESAR Air Traffic Management Modernization. Honeywell Aerospace Advanced Technology June 2014
 SESAR Air Traffic Management Modernization Honeywell Aerospace Advanced Technology June 2014 Honeywell in NextGen and SESAR Honeywell active in multiple FAA NextGen projects ADS-B Surface Indicating and
SESAR Air Traffic Management Modernization Honeywell Aerospace Advanced Technology June 2014 Honeywell in NextGen and SESAR Honeywell active in multiple FAA NextGen projects ADS-B Surface Indicating and
Permanent Reservoir Monitoring (PRM) System Installation: The Installers Perspective
 System Installation: The Installers Perspective") Permanent Reservoir Monitoring (PRM) System Installation: The Installers Perspective Introduction Global Marine Systems Limited (Global Marine) has a vast wealth of knowledge in designing planning and
Permanent Reservoir Monitoring (PRM) System Installation: The Installers Perspective Introduction Global Marine Systems Limited (Global Marine) has a vast wealth of knowledge in designing planning and
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF
 Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter (kucsera.peter@kvk.bmf.hu) Abstract In this article an autonomous advertising mobile robot that has been realized in
Autonomous Advertising Mobile Robot for Exhibitions, Developed at BMF Kucsera Péter (kucsera.peter@kvk.bmf.hu) Abstract In this article an autonomous advertising mobile robot that has been realized in
Robot Perception Continued
 Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
Robot Perception Continued 1 Visual Perception Visual Odometry Reconstruction Recognition CS 685 11 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart
Solving Simultaneous Equations and Matrices
 Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Solving Simultaneous Equations and Matrices The following represents a systematic investigation for the steps used to solve two simultaneous linear equations in two unknowns. The motivation for considering
Woods Hole Group, Inc. Oceanography and Measurement Systems Division INTEGRATED REAL-TIME MONITORING SYSTEM
 Woods Hole Group, Inc. INTEGRATED REAL-TIME MONITORING SYSTEM Woods Hole Group, Inc. (WHG) has developed the Integrated Real-time Monitoring System (IRMS) as a general-purpose data acquisition and telemetry
Woods Hole Group, Inc. INTEGRATED REAL-TIME MONITORING SYSTEM Woods Hole Group, Inc. (WHG) has developed the Integrated Real-time Monitoring System (IRMS) as a general-purpose data acquisition and telemetry
Procon Engineering. Technical Document PELR 1002. TERMS and DEFINITIONS
 Procon Engineering Technical Document PELR 1002 TERMS and DEFINITIONS The following terms are widely used in the weighing industry. Informal comment on terms is in italics and is not part of the formal
Procon Engineering Technical Document PELR 1002 TERMS and DEFINITIONS The following terms are widely used in the weighing industry. Informal comment on terms is in italics and is not part of the formal
Characteristics of Ship Movements in a Fairway
 International Journal of Fuzzy Logic and Intelligent Systems, vol. 1, no. 4, December 1, pp. 85-89 http:// dx.doi.org/ 1.5391/IJFIS.1.1.4.85 PISSN 1598-645 eissn 93-744X Characteristics of Ship Movemen
International Journal of Fuzzy Logic and Intelligent Systems, vol. 1, no. 4, December 1, pp. 85-89 http:// dx.doi.org/ 1.5391/IJFIS.1.1.4.85 PISSN 1598-645 eissn 93-744X Characteristics of Ship Movemen
The Territorial Waters, Continental Shelf, Exclusive Economic Zone and other Maritime Zones Act, 1976, Act No. 80 of 28 May 1976
 Page 1 The Territorial Waters, Continental Shelf, Exclusive Economic Zone and other Maritime Zones Act, 1976, Act No. 80 of 28 May 1976 Short title and commencement 1. (1) This Act may be called the Territorial
Page 1 The Territorial Waters, Continental Shelf, Exclusive Economic Zone and other Maritime Zones Act, 1976, Act No. 80 of 28 May 1976 Short title and commencement 1. (1) This Act may be called the Territorial
World Vessel Traffic Services Guide - United Kingdom - Port of London
 World Vessel Traffic Services Guide - United Kingdom - Port of London Approaches The Port of London is normally approached using one of three channels. The main Deep Water route is from the North East
World Vessel Traffic Services Guide - United Kingdom - Port of London Approaches The Port of London is normally approached using one of three channels. The main Deep Water route is from the North East
Sperry Marine Fleet Management Enterprise Solution
 Sperry Marine Fleet Management Enterprise Solution Performance Based Navigation (PBN) Fuel Navigator Module Alan Aitken Canadian Regional Manager Definition Fleet Management A way of managing infrastructure
Sperry Marine Fleet Management Enterprise Solution Performance Based Navigation (PBN) Fuel Navigator Module Alan Aitken Canadian Regional Manager Definition Fleet Management A way of managing infrastructure
CALCULATING WHEEL-OVER POINT
 Asia-Pacific Journal of Marine Science&Education, Vol. 2, No. 1, 2012, pp. 27-46 CALCULATING WHEEL-OVER POINT Vladimir N. Drachev The article consists of two parts. The first one presents a ship turning
Asia-Pacific Journal of Marine Science&Education, Vol. 2, No. 1, 2012, pp. 27-46 CALCULATING WHEEL-OVER POINT Vladimir N. Drachev The article consists of two parts. The first one presents a ship turning
KOTKA VTS MASTER'S GUIDE
 1 (5) KOTKA VTS MASTER'S GUIDE Vessel Traffic Services The provisions on vessel traffic services are laid down in the Vessel Traffic Service Act 623/2005 and in the Government Decree on Vessel Traffic
1 (5) KOTKA VTS MASTER'S GUIDE Vessel Traffic Services The provisions on vessel traffic services are laid down in the Vessel Traffic Service Act 623/2005 and in the Government Decree on Vessel Traffic
Procedure for Marine Traffic Simulation with AIS Data
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 9 Number 1 March 2015 DOI: 10.12716/1001.09.01.07 Procedure for Marine Traffic Simulation with
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 9 Number 1 March 2015 DOI: 10.12716/1001.09.01.07 Procedure for Marine Traffic Simulation with
MSc in Autonomous Robotics Engineering University of York
 MSc in Autonomous Robotics Engineering University of York Practical Robotics Module 2015 A Mobile Robot Navigation System: Labs 1a, 1b, 2a, 2b. Associated lectures: Lecture 1 and lecture 2, given by Nick
MSc in Autonomous Robotics Engineering University of York Practical Robotics Module 2015 A Mobile Robot Navigation System: Labs 1a, 1b, 2a, 2b. Associated lectures: Lecture 1 and lecture 2, given by Nick
Integration of Drones in Civil Airspace
 Integration of Drones in Civil Airspace «Game of Drones» Catherine Ronflé-Nadaud February 2016 www.developpement-durable.gouv.fr DGAC /DSNA /DTI French Air Navigation Service Provider is responsible for
Integration of Drones in Civil Airspace «Game of Drones» Catherine Ronflé-Nadaud February 2016 www.developpement-durable.gouv.fr DGAC /DSNA /DTI French Air Navigation Service Provider is responsible for
AIS Overview. Evans Starzinger
 AIS Overview by Evans Starzinger Background AIS (Automatic Identification System) is a VHF radio system which automatically communicates vessel information (vessel identity, position, speed, etc) between
AIS Overview by Evans Starzinger Background AIS (Automatic Identification System) is a VHF radio system which automatically communicates vessel information (vessel identity, position, speed, etc) between
Basic Principles of Inertial Navigation. Seminar on inertial navigation systems Tampere University of Technology
 Basic Principles of Inertial Navigation Seminar on inertial navigation systems Tampere University of Technology 1 The five basic forms of navigation Pilotage, which essentially relies on recognizing landmarks
Basic Principles of Inertial Navigation Seminar on inertial navigation systems Tampere University of Technology 1 The five basic forms of navigation Pilotage, which essentially relies on recognizing landmarks
HV Submarine Cable Systems Design, Testing and Installation
 HV Submarine Cable Systems Design, Testing and Installation CIGRE Ireland Technical Seminar 6 th October 2010 Robert Donaghy Senior Consultant Engineer, ESB International Presentation Overview Applications
HV Submarine Cable Systems Design, Testing and Installation CIGRE Ireland Technical Seminar 6 th October 2010 Robert Donaghy Senior Consultant Engineer, ESB International Presentation Overview Applications
Numerical Analysis of the Moving Formwork Bracket Stress during Construction of a Curved Continuous Box Girder Bridge with Variable Width
 Modern Applied Science; Vol. 9, No. 6; 2015 ISSN 1913-1844 E-ISSN 1913-1852 Published by Canadian Center of Science and Education Numerical Analysis of the Moving Formwork Bracket Stress during Construction
Modern Applied Science; Vol. 9, No. 6; 2015 ISSN 1913-1844 E-ISSN 1913-1852 Published by Canadian Center of Science and Education Numerical Analysis of the Moving Formwork Bracket Stress during Construction
Michael Harrison Aviation Management Associates Alternative PNT Public Meeting Stanford University August 10-11. Federal Aviation Administration
 Michael Harrison Aviation Management Associates Alternative PNT Public Meeting Stanford University Suspending Current Belief Current practices for air traffic control, procedures and separation will not
Michael Harrison Aviation Management Associates Alternative PNT Public Meeting Stanford University Suspending Current Belief Current practices for air traffic control, procedures and separation will not
sonobot autonomous hydrographic survey vehicle product information guide
 sonobot autonomous hydrographic survey vehicle product information guide EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
sonobot autonomous hydrographic survey vehicle product information guide EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
Bachelor of Games and Virtual Worlds (Programming) Subject and Course Summaries
 Subject and Course Summaries") First Semester Development 1A On completion of this subject students will be able to apply basic programming and problem solving skills in a 3 rd generation object-oriented programming language (such as
First Semester Development 1A On completion of this subject students will be able to apply basic programming and problem solving skills in a 3 rd generation object-oriented programming language (such as
IMO. MSC/Circ.707 19 October 1995. Ref. T1/2.04 GUIDANCE TO THE MASTER FOR AVOIDING DANGEROUS SITUATIONS IN FOLLOWING AND QUARTERING SEAS
 INTERNATIONAL MARITIME ORGANIZATION 4 ALBERT EMBANKMENT LONDON SE1 7SR Telephone: 020-7735 7611 Fax: 020-7587 3210 Telex: 23588 IMOLDN G IMO E MSC/Circ.707 19 October 1995 Ref. T1/2.04 GUIDANCE TO THE
INTERNATIONAL MARITIME ORGANIZATION 4 ALBERT EMBANKMENT LONDON SE1 7SR Telephone: 020-7735 7611 Fax: 020-7587 3210 Telex: 23588 IMOLDN G IMO E MSC/Circ.707 19 October 1995 Ref. T1/2.04 GUIDANCE TO THE
ENGINEERING METROLOGY
 ENGINEERING METROLOGY ACADEMIC YEAR 92-93, SEMESTER ONE COORDINATE MEASURING MACHINES OPTICAL MEASUREMENT SYSTEMS; DEPARTMENT OF MECHANICAL ENGINEERING ISFAHAN UNIVERSITY OF TECHNOLOGY Coordinate Measuring
ENGINEERING METROLOGY ACADEMIC YEAR 92-93, SEMESTER ONE COORDINATE MEASURING MACHINES OPTICAL MEASUREMENT SYSTEMS; DEPARTMENT OF MECHANICAL ENGINEERING ISFAHAN UNIVERSITY OF TECHNOLOGY Coordinate Measuring
УДК 528 Nguyen Thanh Le APPLYING MULTIBEAM ECHO-SOUNDER SYSTEM IN MAKING MULTISCALE SEABED TOPOGRAPHY MAP IN VIETNAM
 Новый университет. 2013. 11-12(21-22). ISSN 2221-9552 УДК 528 Nguyen Thanh Le APPLYING MULTIBEAM ECHO-SOUNDER SYSTEM IN MAKING MULTISCALE SEABED TOPOGRAPHY MAP IN VIETNAM Making multiscale seabed topography
Новый университет. 2013. 11-12(21-22). ISSN 2221-9552 УДК 528 Nguyen Thanh Le APPLYING MULTIBEAM ECHO-SOUNDER SYSTEM IN MAKING MULTISCALE SEABED TOPOGRAPHY MAP IN VIETNAM Making multiscale seabed topography
Curriculum for the Degree of. Bachelor of Science. Nautical Science
 Curriculum for the Degree of Bachelor of Science In Nautical Science 1 1.Name :Bachelor of Science ( Nautical Science ) Abbreviation : B.Sc.( Nautical Science ) 2.Program of Study The Bachelor of Nautical
Curriculum for the Degree of Bachelor of Science In Nautical Science 1 1.Name :Bachelor of Science ( Nautical Science ) Abbreviation : B.Sc.( Nautical Science ) 2.Program of Study The Bachelor of Nautical
Learning Module 4 - Thermal Fluid Analysis Note: LM4 is still in progress. This version contains only 3 tutorials.
 Learning Module 4 - Thermal Fluid Analysis Note: LM4 is still in progress. This version contains only 3 tutorials. Attachment C1. SolidWorks-Specific FEM Tutorial 1... 2 Attachment C2. SolidWorks-Specific
Learning Module 4 - Thermal Fluid Analysis Note: LM4 is still in progress. This version contains only 3 tutorials. Attachment C1. SolidWorks-Specific FEM Tutorial 1... 2 Attachment C2. SolidWorks-Specific