SIMS 2015 Plenary. Accomplishing Ground Moving Innovations through Modeling, Simulation, and Optimal Control
|
|
|
- Ophelia Kelley
- 7 years ago
- Views:
Transcription
1 SIMS 2015 Plenary Accomplishing Ground Moving Innovations through Modeling, Simulation, and Optimal Control Lars Eriksson Professor Division of Vehicular Systems Department of Electrical Engineering Linköping University

2 The Application Big Toys for Big Boys 3

3 The Application Short Loading Cycle Pick up gravel Reverse and lift Stop Drive and lift Empty bucket Reverse and lower Stop Drive Fill Bucket -How to drive optimally? 4

4 Outline Wheel loader application How to operate the wheel loader optimally Modeling for control and optimal control Formulating and solving the optimal control problem Numerical optimal control Design problems and trade-offs Solving fuel and time optimal driving Design case Stiff converter Design case Intelligent braking Design case Where to park load receiver? Conclusions 5

5 Wheel loader model Sub systems : 1- Driveline Controls: Fuel injection, Brake torque signal. 2- Lifting system Controls: Bucket lift acceleration. 3- Steering system Controls: Derivative of steering angle. States: Engine speed, Intake manifold pressure, Vehicle speed. States: Bucket height, Bucket lift speed. States: Vehicle position X & Y, Heading angle, Steering angle.

6 Wheel loader model = torque Braking acceleration Bucket Fuel b ab mf U U U Controls : = speed Lift height Lift speed Vehicle distance Travelled speed Engine V H V S bucket bucket ice States : ω

7 Diesel engine model P = P + load trac P lift

8 Lift system and constraints

9 Torque converter η tc = φ ψ 1 φ ψ φ 1 φ 1 2 T.C. studied (one delivers 15 % more torque) Remove the discontinuities (efficient numerical optimization) Differentiable model

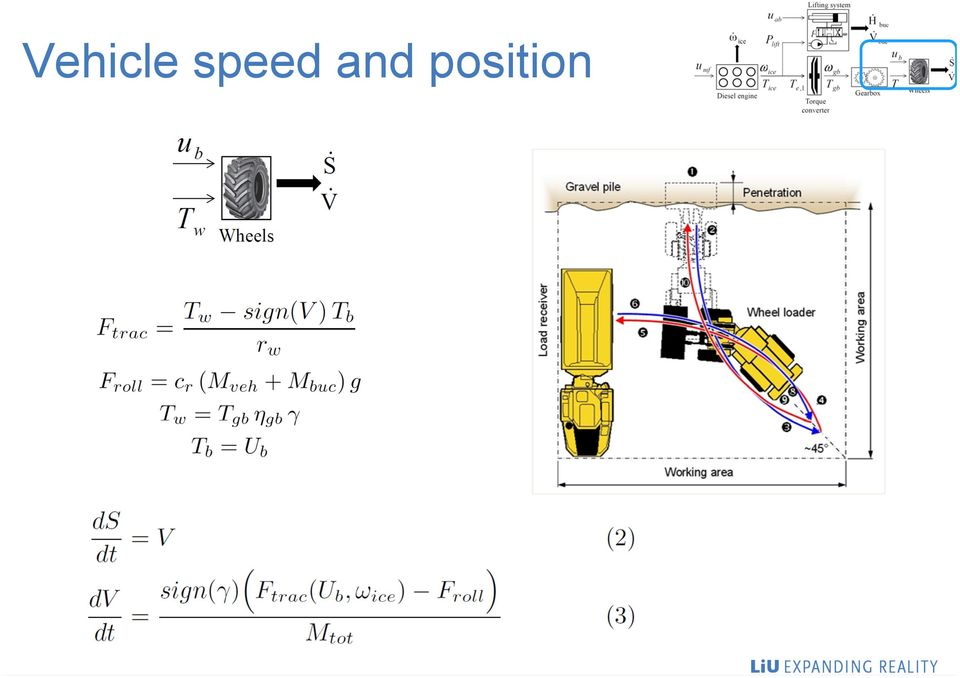
10 Vehicle speed and position
11 Steering system and vehicle position P steer Derivative of dδ = Ustr dt dθ V = dt R dx = V cos( θ ) dt dy = Vsin( θ ) dt steering angle U 2 str Constraints during steering U str, min Continuous steering angle U str U str,max Minimum turning radius L R min = R δ 2tan( ) 2

12 Outline Wheel loader application How to operate the wheel loader optimally Modeling for control and optimal control Formulating and solving the optimal control problem Numerical optimal control Design problems and trade-offs Solving fuel and time optimal driving Design case Stiff converter Design case Intelligent braking Design case Where to park load receiver? Conclusions 13

13 How to drive optimally? Lift transport section (and complete cycle) Minimum Time Minimum Fuel

14 Optimal Control Problem Complete cycle Fork lift application

15 PROPT tool and model implementation

16 Path to Efficient Solution Discretize state and controls in time Very large but sparse optimization problems Efficient solvers available IPOPT, SNOPT, KNITRO Efficient by using gradients and hessians. Use Algorithmic Differentiation Packages enable us to formulate problem and enter models that are differentiable. DIRCOL, ACADO, PROPT, CasADi, OpenModelica Can now solve large non-linear problems efficiently 18

17 Outline Wheel loader application How to operate the wheel loader optimally Modeling for control and optimal control Formulating and solving the optimal control problem Numerical optimal control Design problems and trade-offs Comparing fuel and time optimal driving Design case Stiff converter Design case Intelligent braking Design case Where to park load receiver? Conclusions 19

18 How to drive optimally? Lift & transport section Minimum Time Minimum Fuel

19 Time and fuel optimal solutions, trajectories Min T : acceleration» lifting» acceleration» lifting Min Fuel: - Avoiding high engine speeds. - Simultaneous acceleration and lifting

20 Trade-off between fuel and time optimal Fuel consumption Cycle time Pareto front informative Fuel optimal cycle 50 % shorter -> only 5 % fuel cost Time optimal cycle 5 % longer -> 30 % fuel savings Total Cost Optimization Site optimization

21 Torque converter selection η tc = φ ψ 1 φ ψ φ 1 φ 1 2 T.C. studied (one delivers 15 % more torque) No efficiency difference.
22 Trade-off between fuel and time optimal Stiff torque converter is proven better New knowledge Its a free lunch. In production = Innovation
23 Intelligent Braking Torque Converter vs Service Brakes Easy driving Switch to reverse Use engine and torque converter to brake New idéa: Switch to reverse Control service brakes - How much is saved?
24 Intelligent Braking Torque Converter vs Service Brakes Intelligent braking is - More efficient - Faster - In production = Innovation Optimal Control of Wheel Loader Operation in the Short Loading Cycle Using Two Braking Alternatives. Vaheed Nezhadali, and Lars Eriksson. In: IEEE VPPC The 9th IEEE Vehicle Power and Propulsion Conference. Beijing, China.
25 Free Load Receiver Placement Increased freedom Position Orientation
26 Full Wheel Loader Model Sub systems : 1- Driveline Controls: Fuel injection, Brake torque signal. 2- Lifting system Controls: Bucket lift acceleration. 3- Steering system Controls: Derivative of steering angle. States: Engine speed, Intake manifold pressure, Vehicle speed. States: Bucket height, Bucket lift speed. States: Vehicle position X & Y, Heading angle, Steering angle.
27 Trajectory from loading point to load receiver (Half short loading cycle) Same trajectory for Min M f and Min T cycles Optimal lifting and Path Profiles for a Wheel Loader Considering Engine and Turbo Limitations. Vaheed Nezhadali, and Lars Eriksson. In: Optimization and Optimal Control in Automotive Systems, In Lecture Notes in Control Sciences, Editors: L. del Re, I. Kolmanovsky, M. Steinbuch and H. Waschl. Springer.
28 Innovation Changed Driver Instructions
29 Outline - Conclusions Wheel loader application How to operate the wheel loader optimally Modeling for control and optimal control Formulating and solving the optimal control problem Numerical optimal control Design problems and trade-offs Comparing fuel and time optimal driving Design case Stiff converter Design case Intelligent braking Design case Optimal load receiver placement 34
30 Accomplishing Ground Moving Innovations through Modeling, Simulation, and Optimal Control Lars Eriksson, Special Thanks to: Jonas Larsson, PhD, Volvo CE Anders Froberg, PhD, Volvo CE Vaheed Nezhadali, PhD Student, Vehicular Systems, LiU
31 Publications for futher reading 1- Parallel Multiple-Shooting and Collocation Optimization with OpenModelica. Bernhard Bachmann, Lennart Ochel, Vitalij Ruge, Mahder Gebremedhin, Peter Fritzson, Vaheed Nezhadali, Lars Eriksson, and Martin Sivertsson (2012). In: Modelica th International Modelica Conference. Munich, Germany. 2 - Modeling and Optimal Control of a Wheel Loader in the Lift-Transport Section of the Short Loading Cycle. Vaheed Nezhadali, and Lars Eriksson. In: 7th IFAC Symposium on Advances in Automotive Control. Tokyo, Japan. 3 - Optimal Control of Wheel Loader Operation in the Short Loading Cycle Using Two Braking Alternatives. Vaheed Nezhadali, and Lars Eriksson. In: IEEE VPPC The 9th IEEE Vehicle Power and Propulsion Conference. Beijing, China. 4 - Optimal lifting and Path Profiles for a Wheel Loader Considering Engine and Turbo Limitations. Vaheed Nezhadali, and Lars Eriksson. In: Optimization and Optimal Control in Automotive Systems, In Lecture Notes in Control Sciences, Editors: L. del Re, I. Kolmanovsky, M. Steinbuch and H. Waschl. Springer. 5- Turbocharger Dynamics Influence on Optimal Control of Diesel Engine Powered Systems. Vaheed Nezhadali, Martin Sivertsson and Lars Eriksson In: SAE World Congress 2014, Detroit, USA. 6 - Wheel loader optimal transients in the short loading cycle. Vaheed Nezhadali, Lars Eriksson. The 19th IFAC World Congress 2014, South Africa.
32 Outline - Conclusions Numerical Optimal Control Tools are now mature Solve industrially relevant problems Large size of the state vector Significant nonlinearities Impact on product development beside control Point out counter-intuitive but optimal solutions Relevant models, tools, and problems accelerate innovation. 39
33 Thank You for Your Attention!
FEV Parallel Mode Strategy
 FEV Parallel Mode Strategy Peter Janssen MSc. Dipl.-Ing Glenn Haverkort FEV Motorentechnik As the automotive industry has to react to the global concern about climate change related to CO2 emissions and
FEV Parallel Mode Strategy Peter Janssen MSc. Dipl.-Ing Glenn Haverkort FEV Motorentechnik As the automotive industry has to react to the global concern about climate change related to CO2 emissions and
Discrete mechanics, optimal control and formation flying spacecraft
 Discrete mechanics, optimal control and formation flying spacecraft Oliver Junge Center for Mathematics Munich University of Technology joint work with Jerrold E. Marsden and Sina Ober-Blöbaum partially
Discrete mechanics, optimal control and formation flying spacecraft Oliver Junge Center for Mathematics Munich University of Technology joint work with Jerrold E. Marsden and Sina Ober-Blöbaum partially
Jing Sun Department of Naval Architecture and Marine Engineering University of Michigan Ann Arbor, MI USA
 Automotive Powertrain Controls: Fundamentals and Frontiers Jing Sun Department of Naval Architecture and Marine Engineering University of Michigan Ann Arbor, MI USA Julie Buckland Research & Advanced Engineering
Automotive Powertrain Controls: Fundamentals and Frontiers Jing Sun Department of Naval Architecture and Marine Engineering University of Michigan Ann Arbor, MI USA Julie Buckland Research & Advanced Engineering
RT 780. RT 780 80 USt Lifting Capacity Rough Terrain Cranes Datasheet Imperial. Features
 USt Lifting Capacity Rough Terrain Cranes Datasheet Imperial Features Rated capacity: US t @ ft working radius Maximum boom length: 126 ft Maximum tip height: 1 ft CONTENTS Page: Key...3 Dimensions Crane
USt Lifting Capacity Rough Terrain Cranes Datasheet Imperial Features Rated capacity: US t @ ft working radius Maximum boom length: 126 ft Maximum tip height: 1 ft CONTENTS Page: Key...3 Dimensions Crane
Combustion Engine Optimization
 Combustion Engine Optimization Stefan Jakobsson, Muhammad Saif Ul Hasnain,, Robert Rundqvist, Fredrik Edelvik, Michael Patriksson Mattias Ljungqvist Volvo Cars, Johan Wallesten and Dimitri Lortet Volvo
Combustion Engine Optimization Stefan Jakobsson, Muhammad Saif Ul Hasnain,, Robert Rundqvist, Fredrik Edelvik, Michael Patriksson Mattias Ljungqvist Volvo Cars, Johan Wallesten and Dimitri Lortet Volvo
Introductory Study of Variable Valve Actuation for Pneumatic Hybridization
 2007-01-0288 Introductory Study of Variable Valve Actuation for Pneumatic Hybridization Copyright 2007 SAE International Sasa Trajkovic, Per Tunestål and Bengt Johansson Division of Combustion Engines,
2007-01-0288 Introductory Study of Variable Valve Actuation for Pneumatic Hybridization Copyright 2007 SAE International Sasa Trajkovic, Per Tunestål and Bengt Johansson Division of Combustion Engines,
Modeling and Simulation of Heavy Truck with MWorks
 Modeling and Simulation of Heavy Truck with MWorks Ying Sun, Wei Chen, Yunqing Zhang, Liping Chen CAD Center, Huazhong University of Science and Technology, China zhangyq@hust.edu.cn Abstract This paper
Modeling and Simulation of Heavy Truck with MWorks Ying Sun, Wei Chen, Yunqing Zhang, Liping Chen CAD Center, Huazhong University of Science and Technology, China zhangyq@hust.edu.cn Abstract This paper
VBA Macro for construction of an EM 3D model of a tyre and part of the vehicle
 VBA Macro for construction of an EM 3D model of a tyre and part of the vehicle Guillermo Vietti, Gianluca Dassano, Mario Orefice LACE, Politecnico di Torino, Turin, Italy. guillermo.vietti@polito.it Work
VBA Macro for construction of an EM 3D model of a tyre and part of the vehicle Guillermo Vietti, Gianluca Dassano, Mario Orefice LACE, Politecnico di Torino, Turin, Italy. guillermo.vietti@polito.it Work
RT100 ROUGH TERRAIN CRANE DATASHEET - IMPERIAL. Features:
 ROUGH TERRAIN CRANE DATASHEET - IMPERIAL Features: Rated capacity: 100 ton @ 10 ft working radius Maximum boom length: 174 ft Maximum tip height: 183 ft Maximum hook height: 174.5 ft CONTENTS Key............................................................................................
ROUGH TERRAIN CRANE DATASHEET - IMPERIAL Features: Rated capacity: 100 ton @ 10 ft working radius Maximum boom length: 174 ft Maximum tip height: 183 ft Maximum hook height: 174.5 ft CONTENTS Key............................................................................................
New MITSUBISHI Compact Tractor range: Strong, versatile, reliable, valuable. Made in Japan
 AGRICULTURE GARDENING New MITSUBISHI Compact Tractor range: Strong, versatile, reliable, valuable. Made in Japan ENGINE Engine Nº of Cylinders Displacement Rated RPM (25) Water Cooled Diesel 1,125 cc 2,500
AGRICULTURE GARDENING New MITSUBISHI Compact Tractor range: Strong, versatile, reliable, valuable. Made in Japan ENGINE Engine Nº of Cylinders Displacement Rated RPM (25) Water Cooled Diesel 1,125 cc 2,500
Our New MIT Report: On the Road towards 2050. John B. Heywood Sloan Automotive Laboratory, M.I.T.
 Our New MIT Report: On the Road towards 2050 John B. Heywood Sloan Automotive Laboratory, M.I.T. Presentation at 11 th Concawe Symposium Brussels, February 24, 2015 Issued a Series of Reports On the Road
Our New MIT Report: On the Road towards 2050 John B. Heywood Sloan Automotive Laboratory, M.I.T. Presentation at 11 th Concawe Symposium Brussels, February 24, 2015 Issued a Series of Reports On the Road
ICE²: an integrated software to accelerate your calibration process. Generating excellence
 ICE²: an integrated software to accelerate your calibration process Generating excellence D2T calibration expertise Calibration - Diesel Engines Calibration Engine tuning Model Based Simulation on test
ICE²: an integrated software to accelerate your calibration process Generating excellence D2T calibration expertise Calibration - Diesel Engines Calibration Engine tuning Model Based Simulation on test
Increased cooperation for the future of electrification
 Increased cooperation for the future of electrification Robert Eriksson Hans Göran Milding Swedish Hybrid Center Conference Roads To The Future 2014-03-13 Robert Eriksson, Hans Göran Milding Volvo Car
Increased cooperation for the future of electrification Robert Eriksson Hans Göran Milding Swedish Hybrid Center Conference Roads To The Future 2014-03-13 Robert Eriksson, Hans Göran Milding Volvo Car
2015 OTP truck rules page 1 of 6
 2015 OTP truck rules page 1 of 6 A. Stock 2wd under 5,000 lbs. B. Stock 4wd under 5,000 lbs. C. Stock 4wd small block under 6,000lbs. D. Stock 4wd big block under 6,000lbs E. Super stock 2wd under 4,000lbs.
2015 OTP truck rules page 1 of 6 A. Stock 2wd under 5,000 lbs. B. Stock 4wd under 5,000 lbs. C. Stock 4wd small block under 6,000lbs. D. Stock 4wd big block under 6,000lbs E. Super stock 2wd under 4,000lbs.
Ryan F. Schkoda, Ph.D. Postdoctoral Fellow Wind Turbine Drivetrain Testing Facility Charleston, SC
 Systems Engineering Activities at Clemson University s International Center for Automotive Research (CU-ICAR) and Wind Turbine Drivetrain Testing Facility Ryan F. Schkoda, Ph.D. Postdoctoral Fellow Wind
Systems Engineering Activities at Clemson University s International Center for Automotive Research (CU-ICAR) and Wind Turbine Drivetrain Testing Facility Ryan F. Schkoda, Ph.D. Postdoctoral Fellow Wind
Jeep Renegade Technical specifications
 Jeep Renegade Technical specifications Specifications are based on the latest product information available at the time of publication. All dimensions are in millimeters at curb weight and with standard
Jeep Renegade Technical specifications Specifications are based on the latest product information available at the time of publication. All dimensions are in millimeters at curb weight and with standard
Electronic Power Control
 Service. Self-Study Programme 210 Electronic Power Control Design and Function With the Electronic Power Control system, the throttle valve is actuated only by an electric motor. This eliminates the need
Service. Self-Study Programme 210 Electronic Power Control Design and Function With the Electronic Power Control system, the throttle valve is actuated only by an electric motor. This eliminates the need
Fuel Economy Sensitivity to Vehicle Mass for Advanced Vehicle Powertrains
 26-1-665 Sensitivity to Vehicle Mass for Advanced Vehicle Powertrains Copyright 26 Society of Automotive Engineers, Inc S. Pagerit, P. Sharer, A. Rousseau Argonne National Laboratory ABSTRACT In 22, the
26-1-665 Sensitivity to Vehicle Mass for Advanced Vehicle Powertrains Copyright 26 Society of Automotive Engineers, Inc S. Pagerit, P. Sharer, A. Rousseau Argonne National Laboratory ABSTRACT In 22, the
Gasoline engines. Diesel engines. Hybrid fuel cell vehicles. Model Predictive Control in automotive systems R. Scattolini, A.
 Model Predictive Control in automotive systems R. Scattolini, A. Miotti Dipartimento di Elettronica e Informazione Outline Gasoline engines Diesel engines Hybrid fuel cell vehicles Gasoline engines 3 System
Model Predictive Control in automotive systems R. Scattolini, A. Miotti Dipartimento di Elettronica e Informazione Outline Gasoline engines Diesel engines Hybrid fuel cell vehicles Gasoline engines 3 System
Hybrid Electric Vehicle Architectures
 Hybrid Electric Vehicle Architectures Series, parallel, mild, strong, full, power-assist, one-mode, twomode.. Tom Bradley and Ken Stanton Objectives Recall the means by which HEVs improve fuel economy
Hybrid Electric Vehicle Architectures Series, parallel, mild, strong, full, power-assist, one-mode, twomode.. Tom Bradley and Ken Stanton Objectives Recall the means by which HEVs improve fuel economy
Research on Vehicle Dynamics Simulation for Driving Simulator Fang Tang a, Yanding Wei b, Xiaojun Zhou c, Zhuhui Luo d, Mingxiang Xie e, Peixin Li f
 Advanced Materials Research Vols. 308-310 (2011) pp 1946-1950 Online available since 2011/Aug/16 at www.scientific.net (2011) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amr.308-310.1946
Advanced Materials Research Vols. 308-310 (2011) pp 1946-1950 Online available since 2011/Aug/16 at www.scientific.net (2011) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amr.308-310.1946
VOLVO WHEEL LOADERS BLOCK HANDLING
 VOLVO WHEEL LOADERS BLOCK HANDLING VOLVO S BEEN AROUND THE BLOCK With Volvo on the job, moving large, heavy blocks quickly and effi ciently is easily done. That s because Volvo block handlers are specially
VOLVO WHEEL LOADERS BLOCK HANDLING VOLVO S BEEN AROUND THE BLOCK With Volvo on the job, moving large, heavy blocks quickly and effi ciently is easily done. That s because Volvo block handlers are specially
Model-based Parameter Optimization of an Engine Control Unit using Genetic Algorithms
 Symposium on Automotive/Avionics Avionics Systems Engineering (SAASE) 2009, UC San Diego Model-based Parameter Optimization of an Engine Control Unit using Genetic Algorithms Dipl.-Inform. Malte Lochau
Symposium on Automotive/Avionics Avionics Systems Engineering (SAASE) 2009, UC San Diego Model-based Parameter Optimization of an Engine Control Unit using Genetic Algorithms Dipl.-Inform. Malte Lochau
Energy efficient adaptive cruise control. utilizing V2X information
 9th ITS European Congress, Dublin, Ireland, 4/7 June 2013 SP 0003 Energy efficient adaptive cruise control utilizing V2X information Philipp Themann 1*, Julian Bock 1, Lutz Eckstein 1 1. RWTH Aachen University
9th ITS European Congress, Dublin, Ireland, 4/7 June 2013 SP 0003 Energy efficient adaptive cruise control utilizing V2X information Philipp Themann 1*, Julian Bock 1, Lutz Eckstein 1 1. RWTH Aachen University
CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation. Prof. Dr. Hani Hagras
 1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
1 CE801: Intelligent Systems and Robotics Lecture 3: Actuators and Localisation Prof. Dr. Hani Hagras Robot Locomotion Robots might want to move in water, in the air, on land, in space.. 2 Most of the
All-new Mondeo now offers 14 powertrain combinations as part of a comprehensive four-door, five-door and wagon body-style range, including:
 18-Feb-2015 Cologne Ford Delivers Power of Choice to Mondeo Customers; 14 Petrol, Diesel and Hybrid Models Now Available to Order All-new Ford Mondeo now available to order with 14 powertrain combinations
18-Feb-2015 Cologne Ford Delivers Power of Choice to Mondeo Customers; 14 Petrol, Diesel and Hybrid Models Now Available to Order All-new Ford Mondeo now available to order with 14 powertrain combinations
US Heavy Duty Fleets - Fuel Economy
 US Heavy Duty Fleets - Fuel Economy Feb. 22, 2006 Anthony Greszler Vice President Advanced Engineering VOLVO POWERTRAIN CORPORATION Drivers for FE in HD Diesel Pending oil shortage Rapid oil price increases
US Heavy Duty Fleets - Fuel Economy Feb. 22, 2006 Anthony Greszler Vice President Advanced Engineering VOLVO POWERTRAIN CORPORATION Drivers for FE in HD Diesel Pending oil shortage Rapid oil price increases
Path Tracking for a Miniature Robot
 Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
Path Tracking for a Miniature Robot By Martin Lundgren Excerpt from Master s thesis 003 Supervisor: Thomas Hellström Department of Computing Science Umeå University Sweden 1 Path Tracking Path tracking
Lecture L5 - Other Coordinate Systems
 S. Widnall, J. Peraire 16.07 Dynamics Fall 008 Version.0 Lecture L5 - Other Coordinate Systems In this lecture, we will look at some other common systems of coordinates. We will present polar coordinates
S. Widnall, J. Peraire 16.07 Dynamics Fall 008 Version.0 Lecture L5 - Other Coordinate Systems In this lecture, we will look at some other common systems of coordinates. We will present polar coordinates
HYBRID BUSES COSTS AND BENEFITS
 HYBRID BUSES COSTS AND BENEFITS Key Facts In 2005, more than 60 percent of the 9.7 billion transit passenger trips in the United States were provided by buses, approximately 84 percent of which are powered
HYBRID BUSES COSTS AND BENEFITS Key Facts In 2005, more than 60 percent of the 9.7 billion transit passenger trips in the United States were provided by buses, approximately 84 percent of which are powered
An Analysis of Regenerative Braking and Energy Saving for Electric Vehicle with In-Wheel Motors
 , pp. 219-23 http://dx.doi.org/1.14257/ijca.214.7.12.2 An Analysis of Regenerative Braking and Energy Saving for Electric Vehicle with In-Wheel Motors 1 Li-qiang Jin, 2 Peng-fei Chen and 3 *Yue Liu State
, pp. 219-23 http://dx.doi.org/1.14257/ijca.214.7.12.2 An Analysis of Regenerative Braking and Energy Saving for Electric Vehicle with In-Wheel Motors 1 Li-qiang Jin, 2 Peng-fei Chen and 3 *Yue Liu State
Fault codes DM1. Industrial engines DC09, DC13, DC16. Marine engines DI09, DI13, DI16 INSTALLATION MANUAL. 03:10 Issue 5.0 en-gb 1
 Fault codes DM1 Industrial engines DC09, DC13, DC16 Marine engines DI09, DI13, DI16 03:10 Issue 5.0 en-gb 1 DM1...3 Abbreviations...3 Fault type identifier...3...4 03:10 Issue 5.0 en-gb 2 DM1 DM1 Fault
Fault codes DM1 Industrial engines DC09, DC13, DC16 Marine engines DI09, DI13, DI16 03:10 Issue 5.0 en-gb 1 DM1...3 Abbreviations...3 Fault type identifier...3...4 03:10 Issue 5.0 en-gb 2 DM1 DM1 Fault
Parameter identification of a linear single track vehicle model
 Parameter identification of a linear single track vehicle model Edouard Davin D&C 2011.004 Traineeship report Coach: dr. Ir. I.J.M. Besselink Supervisors: prof. dr. H. Nijmeijer Eindhoven University of
Parameter identification of a linear single track vehicle model Edouard Davin D&C 2011.004 Traineeship report Coach: dr. Ir. I.J.M. Besselink Supervisors: prof. dr. H. Nijmeijer Eindhoven University of
Evaluation of the Automatic Transmission Model in HVE Version 7.1
 HVE-WP-2010-3 Evaluation of the Automatic Transmission Model in HVE Version 7.1 Copyright 2010 Engineering Dynamic Corporation Eric S. Deyerl, P.E., Michael J. Fitch Dial Engineering ABSTRACT The Automatic
HVE-WP-2010-3 Evaluation of the Automatic Transmission Model in HVE Version 7.1 Copyright 2010 Engineering Dynamic Corporation Eric S. Deyerl, P.E., Michael J. Fitch Dial Engineering ABSTRACT The Automatic
ENGINE POWERED 5-10t. ~ r"." - )5 F-ii'ii""i;~ CPCD50 CPCD60 CPCD70 CPCD80 CPCD100
5 F-ii'iii;~ CPCD50 CPCD60 CPCD70 CPCD80 CPCD100") HELl ENGINE POWERED 5-10t I; ~ r"." d- - )5 F-ii'ii""i;~ CPCD50 CPCD60 CPCD70 CPCD80 CPCD100 STANDARD SPECIFICATION Manufacturer HUI HELl ca., LTD. Model CPCD50 CPCD60 CPCD70 CPCD80 CPCD100 Load Capacity
HELl ENGINE POWERED 5-10t I; ~ r"." d- - )5 F-ii'ii""i;~ CPCD50 CPCD60 CPCD70 CPCD80 CPCD100 STANDARD SPECIFICATION Manufacturer HUI HELl ca., LTD. Model CPCD50 CPCD60 CPCD70 CPCD80 CPCD100 Load Capacity
Adaptive Cruise Control of a Passenger Car Using Hybrid of Sliding Mode Control and Fuzzy Logic Control
 Adaptive Cruise Control of a assenger Car Using Hybrid of Sliding Mode Control and Fuzzy Logic Control Somphong Thanok, Manukid arnichkun School of Engineering and Technology, Asian Institute of Technology,
Adaptive Cruise Control of a assenger Car Using Hybrid of Sliding Mode Control and Fuzzy Logic Control Somphong Thanok, Manukid arnichkun School of Engineering and Technology, Asian Institute of Technology,
Dynamic Analysis of the Dortmund University Campus Sky Train
 Dynamic Analysis of the Dortmund University Campus Sky Train Reinhold Meisinger Mechanical Engineering Department Nuremberg University of Applied Sciences Kesslerplatz 12, 90121 Nuremberg, Germany Abstract
Dynamic Analysis of the Dortmund University Campus Sky Train Reinhold Meisinger Mechanical Engineering Department Nuremberg University of Applied Sciences Kesslerplatz 12, 90121 Nuremberg, Germany Abstract
Hyster Tire Handling Solutions. Complete Line of Fork Truck Mounted Tire Handlers
 Hyster Tire Handling Solutions Complete Line of Fork Truck Mounted Tire Handlers A Model to Fit Any Application: Why Hyster/Greenfield Tire Handlers Designed specifically for lift trucks and OPTIMIZED
Hyster Tire Handling Solutions Complete Line of Fork Truck Mounted Tire Handlers A Model to Fit Any Application: Why Hyster/Greenfield Tire Handlers Designed specifically for lift trucks and OPTIMIZED
Fuel Economy Simulation for the Vehicle Fleet
 COVER STORY Simulation and Visualisation Fuel Economy Simulation for the Vehicle Fleet Forecasting the fuel consumption of an entire vehicle fleet has become a crucial challenge for all car manufacturers.
COVER STORY Simulation and Visualisation Fuel Economy Simulation for the Vehicle Fleet Forecasting the fuel consumption of an entire vehicle fleet has become a crucial challenge for all car manufacturers.
Active Yaw Systems: Re-experience Front Wheel Drive with SCHNELLSTER and TWINSTER +
 Active Yaw Systems: Re-experience Front Wheel Drive with SCHNELLSTER and TWINSTER + Peter Obergünner 1 Content Introduction Investigation of different driveline configurations Functional Description -
Active Yaw Systems: Re-experience Front Wheel Drive with SCHNELLSTER and TWINSTER + Peter Obergünner 1 Content Introduction Investigation of different driveline configurations Functional Description -
MOBILE ROBOT TRACKING OF PRE-PLANNED PATHS. Department of Computer Science, York University, Heslington, York, Y010 5DD, UK (email:nep@cs.york.ac.
 MOBILE ROBOT TRACKING OF PRE-PLANNED PATHS N. E. Pears Department of Computer Science, York University, Heslington, York, Y010 5DD, UK (email:nep@cs.york.ac.uk) 1 Abstract A method of mobile robot steering
MOBILE ROBOT TRACKING OF PRE-PLANNED PATHS N. E. Pears Department of Computer Science, York University, Heslington, York, Y010 5DD, UK (email:nep@cs.york.ac.uk) 1 Abstract A method of mobile robot steering
Energy and Thermal Management Simulation of an Advanced Powertrain
 Energy and Thermal Management Simulation of an Advanced Powertrain Armin Traußnig VIRTUAL VEHICLE Research Center 04.10.2013 COMET K2 Competence Center - Initiated by the Federal Ministry of Transport,
Energy and Thermal Management Simulation of an Advanced Powertrain Armin Traußnig VIRTUAL VEHICLE Research Center 04.10.2013 COMET K2 Competence Center - Initiated by the Federal Ministry of Transport,
Advanced ADEPT 48V affordable hybrid on path to meet future ultra-low vehicle emissions
 29 June 2016 Advanced ADEPT 48V affordable hybrid on path to meet future ultra-low vehicle emissions Ricardo-led ADEPT programme aims to demonstrate technology capable of providing near full-hybrid equivalent
29 June 2016 Advanced ADEPT 48V affordable hybrid on path to meet future ultra-low vehicle emissions Ricardo-led ADEPT programme aims to demonstrate technology capable of providing near full-hybrid equivalent
Note: This information obtained from internet sources and not verified- use at your own risk!!!!
 Cummins Engine Diagnostic Fault Codes for 2003 and later engines (generally for 2004 and later Alpines; see page 13 for earlier engine diagnostic codes): Note: This information obtained from internet sources
Cummins Engine Diagnostic Fault Codes for 2003 and later engines (generally for 2004 and later Alpines; see page 13 for earlier engine diagnostic codes): Note: This information obtained from internet sources
11. Rotation Translational Motion: Rotational Motion:
 11. Rotation Translational Motion: Motion of the center of mass of an object from one position to another. All the motion discussed so far belongs to this category, except uniform circular motion. Rotational
11. Rotation Translational Motion: Motion of the center of mass of an object from one position to another. All the motion discussed so far belongs to this category, except uniform circular motion. Rotational
Volvo 7700 Hybrid. Getting there by Hybrid. Technology
 Volvo 7700 Hybrid Getting there by Hybrid Technology the green challenge Authorities all over the world set strict environmental boundaries for public transports. Energy use, pollution and global warming
Volvo 7700 Hybrid Getting there by Hybrid Technology the green challenge Authorities all over the world set strict environmental boundaries for public transports. Energy use, pollution and global warming
TRUCKNOR AS Frode Myre Sales Manager
 TRUCKNOR AS Frode Myre Sales Manager Volvo Truck & Bus distributor Western and south part of Norway 7 dealerships 14 workshops Van Hool bus importer for Norway Public Transport Strømberg Gruppen Trucks
TRUCKNOR AS Frode Myre Sales Manager Volvo Truck & Bus distributor Western and south part of Norway 7 dealerships 14 workshops Van Hool bus importer for Norway Public Transport Strømberg Gruppen Trucks
Longitudinal and lateral dynamics
 Longitudinal and lateral dynamics Lecturer dr. Arunas Tautkus Kaunas University of technology Powering the Future With Zero Emission and Human Powered Vehicles Terrassa 2011 1 Content of lecture Basic
Longitudinal and lateral dynamics Lecturer dr. Arunas Tautkus Kaunas University of technology Powering the Future With Zero Emission and Human Powered Vehicles Terrassa 2011 1 Content of lecture Basic
MUR Motorsports 2015 Seminar Series. Get Involved! Experience Matters Program
 MUR Motorsports 2015 Seminar Series Get Involved! Experience Matters Program Outline Introduction to the group What is Formula SAE? Historical results & future ambitions Competition Details Ways to get
MUR Motorsports 2015 Seminar Series Get Involved! Experience Matters Program Outline Introduction to the group What is Formula SAE? Historical results & future ambitions Competition Details Ways to get
Electric Power Steering Automation for Autonomous Driving
 Electric Power Steering Automation for Autonomous Driving J. E. Naranjo, C. González, R. García, T. de Pedro Instituto de Automática Industrial (CSIC) Ctra. Campo Real Km.,2, La Poveda, Arganda del Rey,
Electric Power Steering Automation for Autonomous Driving J. E. Naranjo, C. González, R. García, T. de Pedro Instituto de Automática Industrial (CSIC) Ctra. Campo Real Km.,2, La Poveda, Arganda del Rey,
Driveability Simulation in the continuous development process. Dr. Josef Zehetner, DI Matthias Dank, Dr. Peter Schöggl, AVL List GmbH, Graz
 Driveability Simulation in the continuous development process Dr. Josef Zehetner, DI Matthias Dank, Dr. Peter Schöggl, AVL List GmbH, Graz Target: Objective Driveability Assessment and Simulation throughout
Driveability Simulation in the continuous development process Dr. Josef Zehetner, DI Matthias Dank, Dr. Peter Schöggl, AVL List GmbH, Graz Target: Objective Driveability Assessment and Simulation throughout
Mathematical Modeling and Dynamic Simulation of a Class of Drive Systems with Permanent Magnet Synchronous Motors
 Applied and Computational Mechanics 3 (2009) 331 338 Mathematical Modeling and Dynamic Simulation of a Class of Drive Systems with Permanent Magnet Synchronous Motors M. Mikhov a, a Faculty of Automatics,
Applied and Computational Mechanics 3 (2009) 331 338 Mathematical Modeling and Dynamic Simulation of a Class of Drive Systems with Permanent Magnet Synchronous Motors M. Mikhov a, a Faculty of Automatics,
Research Report. Impact of Vehicle Weight Reduction on Fuel Economy for Various Vehicle Architectures
 Impact of Vehicle Weight Reduction on Fuel Economy for Various Vehicle Architectures Research Report Conducted by Ricardo Inc. for The Aluminum Association 2008-04 Impact of Vehicle Weight Reduction on
Impact of Vehicle Weight Reduction on Fuel Economy for Various Vehicle Architectures Research Report Conducted by Ricardo Inc. for The Aluminum Association 2008-04 Impact of Vehicle Weight Reduction on
Analysis of fuel cell
 Analysis of fuel cell commuter rail vehicles Stuart Hillmansen*1 1, D Meegahawatte1, C Roberts, P Jennings2, A McGordon2; 1University of Birmingham, United Kingdom, 2University of Warwick, United Kingdom
Analysis of fuel cell commuter rail vehicles Stuart Hillmansen*1 1, D Meegahawatte1, C Roberts, P Jennings2, A McGordon2; 1University of Birmingham, United Kingdom, 2University of Warwick, United Kingdom
Adaptive Cruise Control System Overview
 5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
Star rating driver traffic and safety behaviour through OBD and smartphone data collection
 International Symposium on Road Safety Behaviour Measurements and Indicators Belgian Road Safety Institute 23 April 2015, Brussels Star rating driver traffic and safety behaviour through OBD and smartphone
International Symposium on Road Safety Behaviour Measurements and Indicators Belgian Road Safety Institute 23 April 2015, Brussels Star rating driver traffic and safety behaviour through OBD and smartphone
Center of Gravity. We touched on this briefly in chapter 7! x 2
 Center of Gravity We touched on this briefly in chapter 7! x 1 x 2 cm m 1 m 2 This was for what is known as discrete objects. Discrete refers to the fact that the two objects separated and individual.
Center of Gravity We touched on this briefly in chapter 7! x 1 x 2 cm m 1 m 2 This was for what is known as discrete objects. Discrete refers to the fact that the two objects separated and individual.
Signature and ISX CM870 Electronics
 Signature and ISX CM870 Electronics Cummins West Training Center System Description General Information The Signature and ISX CM870 engine control system is an electronically operated fuel control system
Signature and ISX CM870 Electronics Cummins West Training Center System Description General Information The Signature and ISX CM870 engine control system is an electronically operated fuel control system
Predict Influencers in the Social Network
 Predict Influencers in the Social Network Ruishan Liu, Yang Zhao and Liuyu Zhou Email: rliu2, yzhao2, lyzhou@stanford.edu Department of Electrical Engineering, Stanford University Abstract Given two persons
Predict Influencers in the Social Network Ruishan Liu, Yang Zhao and Liuyu Zhou Email: rliu2, yzhao2, lyzhou@stanford.edu Department of Electrical Engineering, Stanford University Abstract Given two persons
Driver - Vehicle Environment simulation. Mauro Marchitto Kite Solutions
 Driver - Vehicle Environment simulation Mauro Marchitto Kite Solutions Summary From the DVE to the SSDrive tool Overview of SSDrive model Matlab Simulink SSDrive model SSDrive model validation: VTI driving
Driver - Vehicle Environment simulation Mauro Marchitto Kite Solutions Summary From the DVE to the SSDrive tool Overview of SSDrive model Matlab Simulink SSDrive model SSDrive model validation: VTI driving
CX (T3), great performance for unlimited versatility
, great performance for unlimited versatility") CX90-100-110 (T3) The CX range is equipped with the new TIER-3 compliant Perkins 1104D series turbo engines. With powers of up to 102 hp, the new engines provide exceptional power and torque levels. The
CX90-100-110 (T3) The CX range is equipped with the new TIER-3 compliant Perkins 1104D series turbo engines. With powers of up to 102 hp, the new engines provide exceptional power and torque levels. The
Vector surface area Differentials in an OCS
 Calculus and Coordinate systems EE 311 - Lecture 17 1. Calculus and coordinate systems 2. Cartesian system 3. Cylindrical system 4. Spherical system In electromagnetics, we will often need to perform integrals
Calculus and Coordinate systems EE 311 - Lecture 17 1. Calculus and coordinate systems 2. Cartesian system 3. Cylindrical system 4. Spherical system In electromagnetics, we will often need to perform integrals
17/09/2004. Engine. Weight Kerb weight: 1528 kg (AWD 1604 kg) Max total weight: 2150 kg (AWD 2200 kg)
 Max total weight: 2150 kg (AWD 2200 kg)") Volvo V70 Page 1 of 5 Engine Petrol s Five cylinders. Double overhead camshafts, 20 valves. Continuously variable valve timing (CVVT) on the inlet side (s without turbo), exhaust side (s with turbo) or
Volvo V70 Page 1 of 5 Engine Petrol s Five cylinders. Double overhead camshafts, 20 valves. Continuously variable valve timing (CVVT) on the inlet side (s without turbo), exhaust side (s with turbo) or
A Design of DC/DC Converter of Photovoltaic Generation System for Streetcars
 Journal of International Council on Electrical Engineering Vol. 3, No. 2, pp.164~168, 2013 http://dx.doi.org/10.5370/jicee.2013.3.2.164 A Design of DC/DC Converter of Photovoltaic Generation System for
Journal of International Council on Electrical Engineering Vol. 3, No. 2, pp.164~168, 2013 http://dx.doi.org/10.5370/jicee.2013.3.2.164 A Design of DC/DC Converter of Photovoltaic Generation System for
Hydraulic Hybrids from Rexroth: Hydrostatic Regenerative Braking System HRB
 Electric Drives and Controls Hydraulics Linear Motion and Assembly Technologies Pneumatics Service Hydraulic Hybrids from Rexroth: Hydrostatic Regenerative Braking System HRB Recover Energy Reduce Emissions
Electric Drives and Controls Hydraulics Linear Motion and Assembly Technologies Pneumatics Service Hydraulic Hybrids from Rexroth: Hydrostatic Regenerative Braking System HRB Recover Energy Reduce Emissions
Slide 10.1. Basic system Models
 Slide 10.1 Basic system Models Objectives: Devise Models from basic building blocks of mechanical, electrical, fluid and thermal systems Recognize analogies between mechanical, electrical, fluid and thermal
Slide 10.1 Basic system Models Objectives: Devise Models from basic building blocks of mechanical, electrical, fluid and thermal systems Recognize analogies between mechanical, electrical, fluid and thermal
Commentary Drive Assessment
 Commentary Drive Assessment Time start: Time finish: Candidate s Name: Candidate s Email: Date of Assessment: Location: Candidate s Supervisor: Supervisors Contact Number: Supervisors Email: Assessor s
Commentary Drive Assessment Time start: Time finish: Candidate s Name: Candidate s Email: Date of Assessment: Location: Candidate s Supervisor: Supervisors Contact Number: Supervisors Email: Assessor s
Transporter Current Flow Diagram No. 80 / 1
 Transporter Current Flow Diagram No. 80 / 1 2.5 l/65 kw direct injection turbo diesel, engine code AJT From May 1999 2.5 l/75 kw direct injection turbo diesel, engine codes ACV, AUF 2.5 l/111 kw direct
Transporter Current Flow Diagram No. 80 / 1 2.5 l/65 kw direct injection turbo diesel, engine code AJT From May 1999 2.5 l/75 kw direct injection turbo diesel, engine codes ACV, AUF 2.5 l/111 kw direct
Turbo Tech 101 ( Basic )
") Turbo Tech 101 ( Basic ) How a Turbo System Works Engine power is proportional to the amount of air and fuel that can get into the cylinders. All things being equal, larger engines flow more air and as
Turbo Tech 101 ( Basic ) How a Turbo System Works Engine power is proportional to the amount of air and fuel that can get into the cylinders. All things being equal, larger engines flow more air and as
Adams 2014. Geometric Nonlinearity via Adams FE Part - Fully Integrated Inside Adams RELEASE OVERVIEW. MSC Software: Release Overview - Adams 2014
 Continuous Stress/Strain/Deformation Position/Velocity/Acceleration + Centerline, Angle, Sections, Distributed loads 2014 Geometric Nonlinearity via FE Part - Fully Integrated Inside 1) MBD System Model
Continuous Stress/Strain/Deformation Position/Velocity/Acceleration + Centerline, Angle, Sections, Distributed loads 2014 Geometric Nonlinearity via FE Part - Fully Integrated Inside 1) MBD System Model
Power Electronics. Prof. K. Gopakumar. Centre for Electronics Design and Technology. Indian Institute of Science, Bangalore.
 Power Electronics Prof. K. Gopakumar Centre for Electronics Design and Technology Indian Institute of Science, Bangalore Lecture - 1 Electric Drive Today, we will start with the topic on industrial drive
Power Electronics Prof. K. Gopakumar Centre for Electronics Design and Technology Indian Institute of Science, Bangalore Lecture - 1 Electric Drive Today, we will start with the topic on industrial drive
Integration of Engine & Hydraulic Controls for Best Operation
 22.1 Integration of Engine & Hydraulic Controls for Best Operation Gary LaFayette, Stephan Gruettert, Michael Gandrud Sauer-Danfoss (US) Company Boris Laudenbach, Dieter Koenemann Sauer-Danfoss GmbH &
22.1 Integration of Engine & Hydraulic Controls for Best Operation Gary LaFayette, Stephan Gruettert, Michael Gandrud Sauer-Danfoss (US) Company Boris Laudenbach, Dieter Koenemann Sauer-Danfoss GmbH &
1. (from Stewart, page 586) Solve the initial value problem.
 Solve the initial value problem.") . (from Stewart, page 586) Solve the initial value problem.. (from Stewart, page 586) (a) Solve y = y. du dt = t + sec t u (b) Solve y = y, y(0) = 0., u(0) = 5. (c) Solve y = y, y(0) = if possible. 3.
. (from Stewart, page 586) Solve the initial value problem.. (from Stewart, page 586) (a) Solve y = y. du dt = t + sec t u (b) Solve y = y, y(0) = 0., u(0) = 5. (c) Solve y = y, y(0) = if possible. 3.
Electronic Diesel Control EDC 16
 Service. Self-Study Programme 304 Electronic Diesel Control EDC 16 Design and Function The new EDC 16 engine management system from Bosch has its debut in the V10-TDI- and R5-TDI-engines. Increasing demands
Service. Self-Study Programme 304 Electronic Diesel Control EDC 16 Design and Function The new EDC 16 engine management system from Bosch has its debut in the V10-TDI- and R5-TDI-engines. Increasing demands
Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor)
") Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Mike Dempsey Claytex Services Limited: Automatic translation of Simulink models into Modelica
Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Mike Dempsey Claytex Services Limited: Automatic translation of Simulink models into Modelica
IN conventional vehicles powered by gasoline engines, the
 474 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 15, NO. 3, MAY 2007 Control of Integrated Powertrain With Electronic Throttle and Automatic Transmission Daekyun Kim, Huei Peng, Shushan Bai, and
474 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 15, NO. 3, MAY 2007 Control of Integrated Powertrain With Electronic Throttle and Automatic Transmission Daekyun Kim, Huei Peng, Shushan Bai, and
Towards a Benchmark Suite for Modelica Compilers: Large Models
 Towards a Benchmark Suite for Modelica Compilers: Large Models Jens Frenkel +, Christian Schubert +, Günter Kunze +, Peter Fritzson *, Martin Sjölund *, Adrian Pop* + Dresden University of Technology,
Towards a Benchmark Suite for Modelica Compilers: Large Models Jens Frenkel +, Christian Schubert +, Günter Kunze +, Peter Fritzson *, Martin Sjölund *, Adrian Pop* + Dresden University of Technology,
Caterpillar Automatic Code Generation
 SAE TECHNICAL PAPER SERIES 2004-01-0894 Caterpillar Automatic Code Generation Jeffrey M. Thate and Larry E. Kendrick Caterpillar, Inc. Siva Nadarajah The MathWorks, Inc. Reprinted From: Electronic Engine
SAE TECHNICAL PAPER SERIES 2004-01-0894 Caterpillar Automatic Code Generation Jeffrey M. Thate and Larry E. Kendrick Caterpillar, Inc. Siva Nadarajah The MathWorks, Inc. Reprinted From: Electronic Engine
VOLVO GROUP VENTURE CAPITAL. Committed to Volvo Group s vision to become the world leader in sustainable transport solutions
 VOLVO GROUP VENTURE CAPITAL Committed to Volvo Group s vision to become the world leader in sustainable transport solutions We drive new business growth and have a solid record of making winning investments
VOLVO GROUP VENTURE CAPITAL Committed to Volvo Group s vision to become the world leader in sustainable transport solutions We drive new business growth and have a solid record of making winning investments
An idle speed controller for reduced cyclic variability and fuel consumption
 An idle controller for reduced cyclic variability and fuel consumption Chris Manzie and Harry Watson Department of Manufacturing and Mechanical Engineering, The University of Melbourne Parkville, VIC 31,
An idle controller for reduced cyclic variability and fuel consumption Chris Manzie and Harry Watson Department of Manufacturing and Mechanical Engineering, The University of Melbourne Parkville, VIC 31,
The right truck... the right fit.
 4700 Series Lift Trucks The right truck... the right fit. Give your operators more comfort and confidence with the new 4700 Series four-wheel electric lift trucks from Raymond. The 4700 Series is easy
4700 Series Lift Trucks The right truck... the right fit. Give your operators more comfort and confidence with the new 4700 Series four-wheel electric lift trucks from Raymond. The 4700 Series is easy
RACING BUGGY The Racing Buggy represents Fornasari s attitude to innovation and creativity. Introduced in 2010, it is a car which combines the Fornasa
 RACING BUGGY RACING BUGGY The Racing Buggy represents Fornasari s attitude to innovation and creativity. Introduced in 2010, it is a car which combines the Fornasari 600 off-road racing features with a
RACING BUGGY RACING BUGGY The Racing Buggy represents Fornasari s attitude to innovation and creativity. Introduced in 2010, it is a car which combines the Fornasari 600 off-road racing features with a
Exclusively Marketed by Anthola Pte Ltd & Singapore Insurance & Credit LLP (Supported by Lonpac Insurance SIngapore) Copyright 2012 AIC
 Copyright 2012 AIC") Exclusively Marketed by Anthola Pte Ltd & Singapore Insurance & Credit LLP (Supported by Lonpac Insurance SIngapore) Copyright 2012 AIC Agenda 1 2 3 4 5 6 7 Executive Summary Who are we? What are Singapore
Exclusively Marketed by Anthola Pte Ltd & Singapore Insurance & Credit LLP (Supported by Lonpac Insurance SIngapore) Copyright 2012 AIC Agenda 1 2 3 4 5 6 7 Executive Summary Who are we? What are Singapore
E/ECE/324/Rev.1/Add.12/Rev.7/Amend.4 E/ECE/TRANS/505/Rev.1/Add.12/Rev.7/Amend.4
 6 December 2012 Agreement Concerning the adoption of uniform technical prescriptions for wheeled vehicles, equipment and parts which can be fitted and/or be used on wheeled vehicles and the conditions
6 December 2012 Agreement Concerning the adoption of uniform technical prescriptions for wheeled vehicles, equipment and parts which can be fitted and/or be used on wheeled vehicles and the conditions
The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w
![The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w](/thumbs/25/5134815.jpg "The dynamic equation for the angular motion of the wheel is R w F t R w F w ]/ J w") Chapter 4 Vehicle Dynamics 4.. Introduction In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration
Chapter 4 Vehicle Dynamics 4.. Introduction In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration
Automatic Train Control based on the Multi-Agent Control of Cooperative Systems
 The Journal of Mathematics and Computer Science Available online at http://www.tjmcs.com The Journal of Mathematics and Computer Science Vol.1 No.4 (2010) 247-257 Automatic Train Control based on the Multi-Agent
The Journal of Mathematics and Computer Science Available online at http://www.tjmcs.com The Journal of Mathematics and Computer Science Vol.1 No.4 (2010) 247-257 Automatic Train Control based on the Multi-Agent
Hydrostatic closed loop Bosch Rexroth. Fuel tank 180 l 180 l
 R6480 RTH5.26S MACHINE MODEL ENGINE TRANSMISSION AXLES AND BRAKES PERFORMANCE WEIGHTS TANKS CAPACITIES HYDRAULIC CIRCUIT DIMENSIONS CONFORMTY TO STANDARDS Rotating telescopic forklift Maximum lifting capacity
R6480 RTH5.26S MACHINE MODEL ENGINE TRANSMISSION AXLES AND BRAKES PERFORMANCE WEIGHTS TANKS CAPACITIES HYDRAULIC CIRCUIT DIMENSIONS CONFORMTY TO STANDARDS Rotating telescopic forklift Maximum lifting capacity
Ground Rules. PC1221 Fundamentals of Physics I. Kinematics. Position. Lectures 3 and 4 Motion in One Dimension. Dr Tay Seng Chuan
 Ground Rules PC11 Fundamentals of Physics I Lectures 3 and 4 Motion in One Dimension Dr Tay Seng Chuan 1 Switch off your handphone and pager Switch off your laptop computer and keep it No talking while
Ground Rules PC11 Fundamentals of Physics I Lectures 3 and 4 Motion in One Dimension Dr Tay Seng Chuan 1 Switch off your handphone and pager Switch off your laptop computer and keep it No talking while
Angular acceleration α
 Angular Acceleration Angular acceleration α measures how rapidly the angular velocity is changing: Slide 7-0 Linear and Circular Motion Compared Slide 7- Linear and Circular Kinematics Compared Slide 7-
Angular Acceleration Angular acceleration α measures how rapidly the angular velocity is changing: Slide 7-0 Linear and Circular Motion Compared Slide 7- Linear and Circular Kinematics Compared Slide 7-
PHYSICS 111 HOMEWORK SOLUTION #9. April 5, 2013
 PHYSICS 111 HOMEWORK SOLUTION #9 April 5, 2013 0.1 A potter s wheel moves uniformly from rest to an angular speed of 0.16 rev/s in 33 s. Find its angular acceleration in radians per second per second.
PHYSICS 111 HOMEWORK SOLUTION #9 April 5, 2013 0.1 A potter s wheel moves uniformly from rest to an angular speed of 0.16 rev/s in 33 s. Find its angular acceleration in radians per second per second.
CHASSIS - 4WD SYSTEM. Realizes stable start-off and acceleration performance
 CH-66 CHASSIS - 4WD SYSTEM 4WD SYSTEM DESCRIPTION The 4WD system of the 06 RAV4 uses an active torque control 4WD system. It is a compact, lightweight, and high performance 4WD system that optimally controls
CH-66 CHASSIS - 4WD SYSTEM 4WD SYSTEM DESCRIPTION The 4WD system of the 06 RAV4 uses an active torque control 4WD system. It is a compact, lightweight, and high performance 4WD system that optimally controls
Intermodal Handling TOP PERFORMANCE WITH SMART SOLUTIONS
 Intermodal Handling TOP PERFORMANCE WITH SMART SOLUTIONS Intelligent intermodal solutions ensure safe and sustainable transport of goods International trade is constantly changing its ways and requirements
Intermodal Handling TOP PERFORMANCE WITH SMART SOLUTIONS Intelligent intermodal solutions ensure safe and sustainable transport of goods International trade is constantly changing its ways and requirements
Daimler Trucks Division Day 2013 September 20 th, 2013. Stefan Buchner Head of Mercedes-Benz Trucks
 Daimler Trucks Division Day 2013 September 20 th, 2013 Stefan Buchner Head of Mercedes-Benz Trucks TE Agenda 1 Mercedes-Benz Trucks business status and challenges 2 Competitive product portfolio successful
Daimler Trucks Division Day 2013 September 20 th, 2013 Stefan Buchner Head of Mercedes-Benz Trucks TE Agenda 1 Mercedes-Benz Trucks business status and challenges 2 Competitive product portfolio successful
Radiated Emission and Susceptibility
 Radiated Emission and Susceptibility Tzong-Lin Wu, Ph.D. EMC Lab Department of Electrical Engineering National Taiwan University Differential-Mode v.s. Common-mode Currents 1 Differential-Mode v.s. Common-mode
Radiated Emission and Susceptibility Tzong-Lin Wu, Ph.D. EMC Lab Department of Electrical Engineering National Taiwan University Differential-Mode v.s. Common-mode Currents 1 Differential-Mode v.s. Common-mode
Wynn s Extended Care
 Wynn s Extended Care Every car deserves to receive the very best care... especially yours. How Do You Keep Your Reliable Transportation Reliable? Count on Wynn s Because Wynn s has been caring for cars
Wynn s Extended Care Every car deserves to receive the very best care... especially yours. How Do You Keep Your Reliable Transportation Reliable? Count on Wynn s Because Wynn s has been caring for cars
Balancing Manufacturability and Optimal Structural Performance for Laminate Composites through a Genetic Algorithm
 Balancing Manufacturability and Optimal Structural Performance for Laminate Composites through a Genetic Algorithm Mike Stephens Senior Composites Stress Engineer, Airbus UK Composite Research, Golf Course
Balancing Manufacturability and Optimal Structural Performance for Laminate Composites through a Genetic Algorithm Mike Stephens Senior Composites Stress Engineer, Airbus UK Composite Research, Golf Course
Elevator Simulation and Scheduling: Automated Guided Vehicles in a Hospital
 Elevator Simulation and Scheduling: Automated Guided Vehicles in a Hospital Johan M. M. van Rooij Guest Lecture Utrecht University, 31-03-2015 from x to u The speaker 2 Johan van Rooij - 2011 current:
Elevator Simulation and Scheduling: Automated Guided Vehicles in a Hospital Johan M. M. van Rooij Guest Lecture Utrecht University, 31-03-2015 from x to u The speaker 2 Johan van Rooij - 2011 current:
Homework #1 Solutions
 MAT 303 Spring 203 Homework # Solutions Problems Section.:, 4, 6, 34, 40 Section.2:, 4, 8, 30, 42 Section.4:, 2, 3, 4, 8, 22, 24, 46... Verify that y = x 3 + 7 is a solution to y = 3x 2. Solution: From
MAT 303 Spring 203 Homework # Solutions Problems Section.:, 4, 6, 34, 40 Section.2:, 4, 8, 30, 42 Section.4:, 2, 3, 4, 8, 22, 24, 46... Verify that y = x 3 + 7 is a solution to y = 3x 2. Solution: From
Diagnostic Fault Codes For Cummins Engines
 Section - Diagnostic Fault Codes For Cummins Engines Applies to Engine Models T, T, QSL T, QSM, QS, QSK9, QSK, QST, QSK//8 Note: These fault codes are current at date of publication. Always refer to engine
Section - Diagnostic Fault Codes For Cummins Engines Applies to Engine Models T, T, QSL T, QSM, QS, QSK9, QSK, QST, QSK//8 Note: These fault codes are current at date of publication. Always refer to engine
Implementation of the Movable Photovoltaic Array to Increase Output Power of the Solar Cells
 Implementation of the Movable Photovoltaic Array to Increase Output Power of the Solar Cells Hassan Moghbelli *, Robert Vartanian ** * Texas A&M University, Dept. of Mathematics **Iranian Solar Energy
Implementation of the Movable Photovoltaic Array to Increase Output Power of the Solar Cells Hassan Moghbelli *, Robert Vartanian ** * Texas A&M University, Dept. of Mathematics **Iranian Solar Energy